Контактное устройство для измерения конфигурации и размеров объемного тела, блок измерения конфигурации и размеров объемного тела, способ измерения конфигурации и размеров объемного тела с использованием заявляемого контактного устройства
Заявляются три самостоятельные технические решения, неразрывно связанные между собой и предназначенные для решения единой общей задачи:
- контактное устройство для измерения конфигурации и размеров объемного тела,
- блок измерения конфигурации и размеров объемного тела, которая используется в контактном устройстве для измерения конфигурации и размеров объемного тела,
- способ измерения конфигурации и размеров объемного тела, в котором используется контактное устройство для измерения конфигурации и размеров объемного тела.
Предлагаемые технические решения предназначены преимущественно для вычисления параметров измеряемой поверхности при создании высокоточных ортезов, а также изготовления или подбора персонализированной одежды, обуви, головных уборов, очков, стелек, поверхностей кресел, кроватей и т.д., в интересах обеспечения высокой комфортности при соприкосновении с телом человека.
Неразрывность указанных самостоятельных технических решений в рамках достижения единой цели заключается в том, что первое техническое решение представляет собой решение, в большей степени, механическую систему для измерения конфигурации и размеров объемного тела, причем данная система создает оптимальные условия для высокоточного измерения поверхности объекта, а также служит для размещения оптико-электронных элементов второго технического решения, а именно для блока измерения конфигурации и размеров объемного тела, который в свою очередь обеспечивает измерение объема, конфигурации и формы объемного тела, над которым выполнены технические манипуляции устройством, реализующим первое заявленное техническое решение; представленное же третье техническое решение описывает способ измерения конфигурации и размеров объемного тела, которые реализует на электронно-вычислительном уровне второе техническое решение, а на механическом уровне - первое техническое решение. Таким образом, именно совокупность рассмотренных трех технических решений обеспечивает достижение цели изобретения.
Первое заявляемое техническое решение - контактное устройство для измерения конфигурации и размеров объемного тела решает задачу создания конструкции, при помощи которой удобно выполнять высокоточные измерения и на их основе создавать реконструкции 3-х мерной (объемной) поверхности тела или отдельных его частей, или подбирать из готовых изделий наиболее подходящие для индивидуума изделия.
Создание цифрового образа всего тела или любой отдельной его части осуществляется путем съемки очертания его поверхности и компьютерного моделирования, выполненного по результатам этой съемки.
Из уровня техники известны устройства, при помощи которых выполняются измерения и создаются компьютерные модели.
Из описания к свидетельству (19) RU, (11) 40849, (13) U1, (51) МПК7 А41Н 1/02, известно техническое решение «СИСТЕМА ДЛЯ ПРОИЗВОДСТВА ТОВАРОВ НАРОДНОГО ПОТРЕБЛЕНИЯ», (21), (22) 2004119256/22, 29.06.2004, которая представляет собой специально оборудованные пункты, в которых каждый человек может при желании создать цифровой образ поверхности собственного тела или части его тела и записать образ на пластиковую карточку. В этой системе имеется устройство формирования плоских двумерных изображений поверхности тела человека и/или отдельных его частей в цифровом коде, связанных с первым компьютером, который запрограммирован с возможностью формирования данных, характеризующих размеры тела человека и/или отдельных его частей в виде трехмерной цифровой модели поверхности тела человека и/или отдельных его частей, удаленный компьютер снабжен средством формирования матрицы соответствия размеров тела человека и/или его частей размерам моделей товаров.
Недостатком данной системы является низкая точность, вызванная следующими причинами: используется сенсор, реализующий вычисление глубины (расстояния) до объекта с ограниченной и относительно невысокой точностью. Предложенный метод обеспечивает измерение поверхности одежды, но не тела человека; весьма сложен вопрос объединения данных с множества позиций вследствие наличия погрешностей и неизвестных взаимных позиций местоположений сенсоров (или неизвестных позиций одного сенсора).
Из описания к патенту на изобретение (19) RU(11) 2391042 (13) С2 (51) МПК А61В 5/00(2006.01), (54) «СПОСОБ ИССЛЕДОВАНИЯ СОСТОЯНИЯ ОТДЕЛОВ СТОПЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ» известно устройство, позволяющее получать отпечатки поверхности стопы. Изобретение относится к области медицины и медицинской техники, а именно к ортопедической диагностике, и может быть использовано в качестве объективного метода для диагностики различных деформаций стопы, в частности плоскостопия, повреждений "диабетической стопы" при обследовании пациентов в военкоматах, лечебных и образовательных учреждениях. Отпечатки трех проекций стопы получают при помощи устройства для исследования состояния отделов стопы, содержащего укрепленный горизонтально расположенный планшетный сканер, способный выдерживать вес человека. Дополнительно устройство включает расположенный в вертикальной плоскости планшетный сканер и светоизолирующий кожух.
Недостатком данного устройства является то, что данное устройство предназначено для фиксаций только проекций стопы, а не трехмерного изображения, при этом процесс сканирования выполняется медленно, а устройство имеет низкую надежность.
Известно устройство, позволяющее получать отпечатки поверхности сегментов объемного тела для выбора матраса (см. описание к патенту CN 106061382 (А) - 2016-10-26). Данное устройство содержит: основание, платформу, прикрепленную к основанию таким образом, что она поддерживается под небольшим наклоном, смещенным от вертикали; имеется интерфейс для передачи сигналов, между человеком, опирающимся на платформу и платформой, для создания модели для выбора матраса или дизайна. Устройство может измерять форму предмета, находящегося в лежачем положении, или измерить распределение давления между человеком и платформой. Характеристики формы тела могут быть измерены с помощью оттиска тела и оценены в результате стереоскопического фотографирования вмятин, отмеченных или проецируемых на листовом материале.
Недостатком данного технического решения является низкая точность полученной модели тела, обусловленная следующими причинами: отсутствием проработанного технического решения, обеспечивающим получение стереоскопического изображения, лишенного искажений оптической системы и пространственных геометрических искажений; отсутствием возможности получения модели тела со всех сторон; использованием вторичных данных (формы продавленного матраса), вместо первичных данных (непосредственного измерения поверхности тела человека).
В описании к патенту на полезную модель (19) RU, (11) 149647, (13) U1 (51), МПК А41Н 1/00 (2006.01), (54)« ЭЛАСТИЧНЫЙ ЭТАЛОН ДЛЯ БЕСКОНТАКТНОГО СНЯТИЯ МЕРОК» используются признаки - «эластичная основа, и нерастяжимые графические элементы определенной формы и размера, закрепленные на поверхности эластичной основы, обладающие формоустойчивостыо и нерастяжимостью во всех направлениях и служащие размерным эталоном», используются признаки, имеющиеся в заявляемом контактном устройстве для измерения конфигурации и размеров объемного тела.
Недостаток данного технического решения в том, что для каждого человека нужен свой комбинезон - эталон, при этом создается дискомфорт при надевании-снимании комбинезона, увеличивается время выполнения измерения, к тому же костюм обтягивает объект по выпуклостям, а в вогнутые части тела не прилегает, что не обеспечивает очень высокой точности измерения.
Техническим результатом от использования заявляемого контактного устройства для измерения конфигурации и размеров объемного тела (далее по тексту - устройство) является повышение точности измерений поверхности исследуемого объекта, по сравнению с аналогами, за счет того, что в данном устройстве системой измерения выполняются измерения 3-х мерных поверхностей герметичной и эластичной оболочки (далее по тексту - оболочка) в области, прижатой ко всей исследуемой поверхности тела, где на поверхности оболочек нанесена разметка в виде либо цветных линий, либо цветных участков поверхности, либо маркеров, либо точек.
Для измерения используется устройство, выполненное либо из одного, либо из нескольких соединяющихся между собой модулей, которые могут иметь между собой соединения, например подвижные шарнирные и/или замковые.
Каждый из модулей состоит из герметичного корпуса с жесткими стенками, на внутренних сторонах которых закреплен блок измерения конфигурации и размеров объемного тела (далее по тексту - блок измерения). К этим стенкам герметично крепятся одна или несколько эластичных оболочек, которые раздуваются перед началом измерений до необходимого объема, и сдуваются после окончания измерений. На внутренних поверхностях оболочек в области предполагаемого контакта с поверхностью измеряемого тела нанесена разметка в виде либо цветных линий, либо цветных участков поверхности, либо маркеров, либо точек.
Количество модулей и форма оболочек выбирается в зависимости от размера и сложности конфигурации измеряемой поверхности.
Если устройство предназначено для измерений небольших однотипных поверхностей, то чаще всего форма эластичной оболочки повторяет форму исследуемого объекта.
Если устройство предназначено для измерений больших и/или разнотипных поверхностей, модуль может иметь несколько одинаковых по форме и размеру эластичных оболочек.
В случае, если корпус выполнен разборным, или складным, то такое устройство в разобранном или сложенном состоянии уплощается и занимает мало места.
Внедрение технического решения заявляемого устройства позволит повысить точность измерения трехмерных криволинейных сложных поверхностей для различных индивидуальных высокоточных различных высокоточных изделий - шлемов, очков, париков, обуви, одежды, ортезов.
Описание первого технического решения - контактного устройства для измерения конфигурации и размеров объемного тела
Контактное устройство для измерения конфигурации и размеров объемного тела выполнено из одного или нескольких модулей, соединенных с одним или несколькими компрессорами. Модули имеют в своем составе блок измерения, герметичную эластичную оболочку с нанесенной на ней разметкой, герметично соединенную с одной или несколькими стенками. Модули могут иметь между собой шарнирные и/или замковые соединения.
Устройство имеет два состояния: исходное и состояние в режиме измерения.
В исходном состоянии оболочка не прилегает к измеряемой поверхности, оболочка/оболочки не раздуты, блок измерения конфигурации и размеров объемного тела выключен.
В режиме измерения оболочка раздута, наложена на исследуемую поверхность в зонах контакта и повторяет конфигурацию этой поверхности. При этом разметка нанесена на оболочку в зонах контакта со стороны установки блока измерения конфигурации и размеров объемного тела, который в этом режиме включен.
Контактирующая часть оболочки может как повторять, так и не повторять по форме и размеру измеряемую поверхность. В первом случае конфигурация и размеры поверхности оболочек приближены к конфигурации и размерам измеряемого объемного тела, во втором - оболочки модуля/модулей выполнены не повторяющими форму измеряемого объекта, и преимущественно, выполнены одинаковыми между собой.
Оболочка устройства выполнена из эластичной ткани, которая может быть покрыта, например, силиконом, резиной или латексом.
Разметка может быть выполнена в виде либо цветных линий, либо цветных участков поверхности, либо маркеров, либо точек.
В качестве материала для корпуса может быть выбрана пластмасса.
Описание чертежей:
На Фиг. 1 - Фиг. 8 изображены примеры выполнения устройства, используемого по различным назначениям, где
100 - объект измерения;
101 - модуль;
102 - корпус;
103 - стенка;
104 - система измерения конфигурации и размеров объемного тела;
105 - оболочка;
106 - разметка;
107 - вход - выход воздуха (подключение к компрессору);
108 - шлем;
109 - внутренняя поверхность шлема;
110 - подвижное соединение модулей.
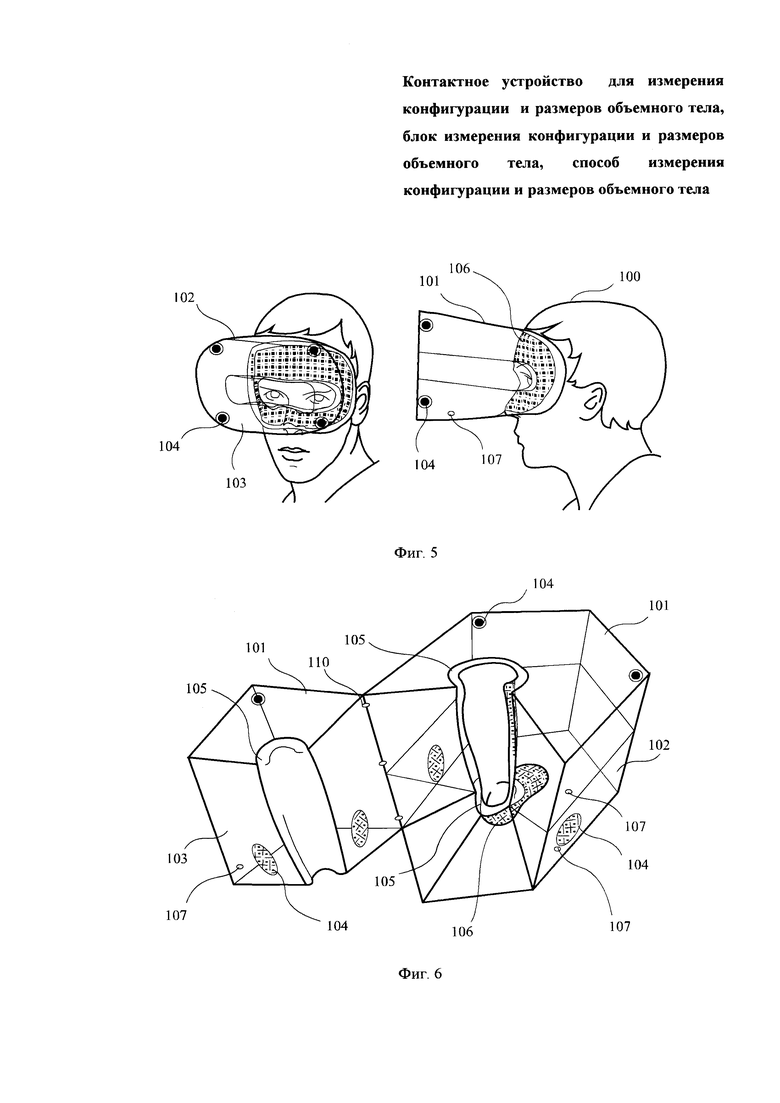
Фиг. 1 - пример устройства для измерения поверхности головы человека, где устройство состоит из одного модуля 101, выполненного из герметичного корпуса 102, имеющего жесткие стенки 103, где на их внутренних сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из одной эластичной оболочки 105, герметично соединенной с корпусом 102, с разметкой 106 в виде маркеров на стороне оболочки, не прилегающей к поверхности головы, 107 - подключение компрессора.
Фиг. 2 - пример устройства для измерения поверхности головы человека, где устройство состоит из одного модуля 101, выполненного из герметичного корпуса 102, имеющего жесткие стенки 103, где на их внутренних сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из трех эластичных оболочек 105, герметично соединенных с корпусом 102, с разметкой 106 в виде линий и точек на стороне оболочки, не прилегающей к поверхности головы, 107 - подключение компрессора.
Фиг. 3 - пример устройства для измерения поверхности головы человека, где устройство состоит из двух модулей 101, скрепленных между собой при помощи подвижного соединения ПО, выполненных в виде герметичных корпусов 102, имеющих жесткие стенки 103, где на их сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из двух эластичных оболочек 105, герметично соединенных с корпусом 102, с разметкой 106 в виде маркеров оболочки, не прилегающей к поверхности головы, 107 - подключение компрессора.
Фиг. 4 - пример устройства для измерения пространства внутри шлема 108, где устройство состоит из одного модуля 101, имеющего жесткую стенку 103, где на ее внутренней стороне закреплен блок измерения конфигурации и размеров 104, одной эластичной оболочки 105, герметично соединенной с корпусом 102, с разметкой 106 в виде маркеров на стороне оболочки, не прилегающей к внутренней поверхности шлема 109, 107 - подключение компрессора.
Фиг. 5 - пример устройства для измерения части лица вокруг глаз человека, где устройство состоит из одного модуля 101, выполненного из герметичного корпуса 102, имеющего жесткие стенки 103, где на их внутренних сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из одной эластичной оболочки 105, герметично соединенной с корпусом 102, с разметкой 106 в виде маркеров на стороне оболочки, не прилегающей к поверхности лица, 107 - подключение компрессора.
Фиг. 6 - пример устройства для измерения ноги человека (голени и стопы), где устройство состоит из двух модулей 101, скрепленных между собой при помощи подвижного соединения 110, выполненных из двух герметичных корпусов 102, имеющих жесткие стенки 103, где на их сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из двух эластичных оболочек 105, герметично соединенных с корпусом 102, с разметкой 106 в виде линий и точек на сторонах оболочек, не прилегающих к поверхности ноги, 107 - подключение компрессора.
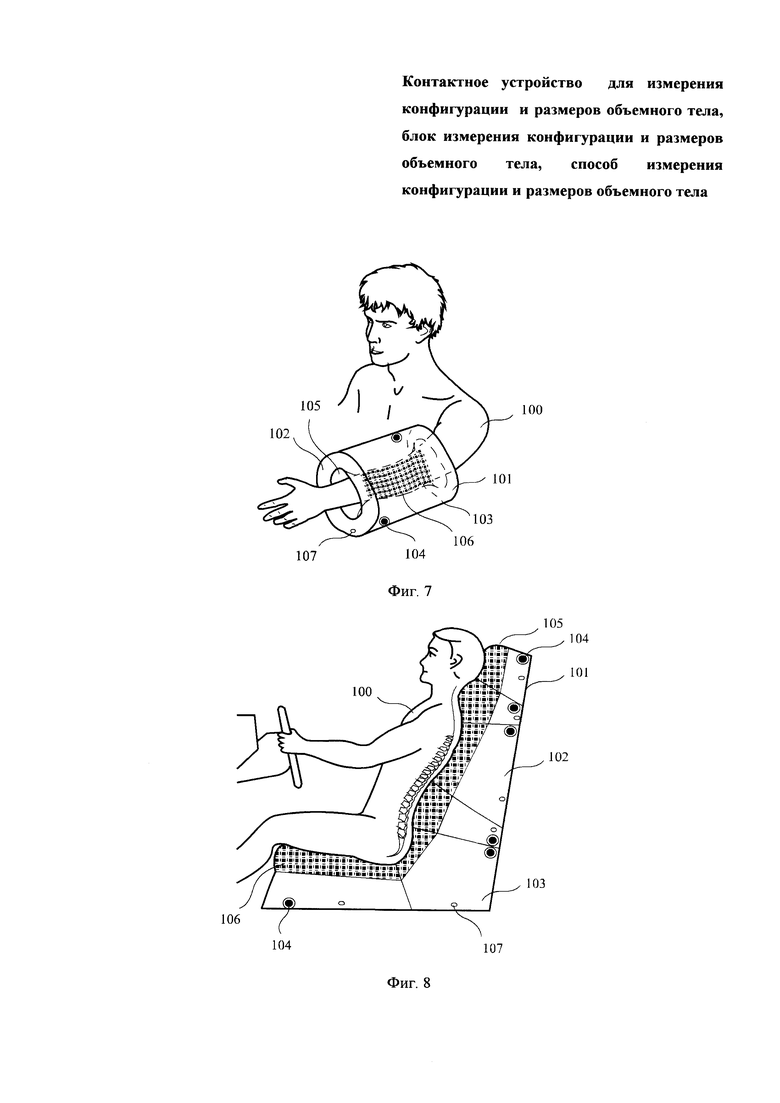
Фиг. 7 - пример устройства для измерения локтевого сустава руки человека, где устройство состоит из одного модуля 101, выполненного из герметичного корпуса 102, имеющего жесткие стенки 103, где на их внутренних сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из одной эластичной оболочки 105, герметично соединенной с корпусом 102, с разметкой 106 в виде маркеров на стороне оболочки, не прилегающей к поверхности локтевого сустава, 107 - подключение компрессора.
Фиг. 8 - пример устройства для измерения поверхности кресла для человека, где устройство состоит из одного модуля 101, выполненного из герметичного корпуса 102, имеющего жесткие стенки 103, где на их внутренних сторонах закреплен блок измерения конфигурации и размеров объемного тела 104, состоящего из шести эластичных оболочек 105, герметично соединенных с корпусом 102, с разметкой 106 в виде маркеров на сторонах оболочек, не прилегающих к поверхности тела человека, 107 - подключение компрессора.
На фигурах приведено ограниченное количество воплощений изделия. В реальности их может быть множество, в зависимости от цели применения.
Размеры устройства подбираются в зависимости от размеров измеряемых объектов. Материалы для корпуса - преимущественно пластмасса, оболочка - эластичные ткани, для герметизации покрытые силиконом, резиной или латексом. Величина давления внутри оболочек варьируется в пределах - 0,5÷0,2 Атм., что относится к категории низкого вакуума и низкого давления, что безопасно для человека.
Используемые в устройстве покупные изделия: безмаслянный компрессор мощностью 1,1 КВт, производительностью 180 литров/мин; ресивер объемом 6 литров, Мах давление 8 бар; вакуум создается при помощи эжектора Camozzi Мах значение вакуума для растягивания оболочки не более -0,08 бар, Мах давление в устройстве для сжатия оболочки 0,05 бар (установлено экспериментально).
Второе самостоятельное техническое решение, используемое в первом - блок измерения конфигурации и размеров объемного тела
Данный блок является частным случаем блока измерения конфигурации и размеров объемного тела, который работает в составе контактного устройства для измерения конфигурации и размеров объемного тела.
Посредством его производится измерение размеров и формы поверхности и передача полученной информации в результате обработки информации.
Из уровня техники известно устройство для измерения геометрии профиля сферически изогнутых, в частности, цилиндрических тел, (см. описание изобретения патента (19) RU, (11) 2523092, (13) С2, (51) МПК G01B 11/25 (2006.01), (54) СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ПРОФИЛЯ СФЕРИЧЕСКИ ИЗОГНУТЫХ, В ЧАСТНОСТИ, ЦИЛИНДРИЧЕСКИХ ТЕЛ), где в качестве средства измерения используют лазерные лучи. Для усиления отражения лазерных лучей в камеру и из критических краевых областей измеряемого объекта двухмерное световое сечение, при котором с использованием, по меньшей мере, одного лазера проецируется веерообразная лазерная линия в качестве линии светового сечения на поверхность тела и отраженные от поверхности тела лучи воспринимаются, по меньшей мере, одной камерой для съемки поверхностей, причем лазер и камера расположены под углом триангуляции в нормальной плоскости по линии оси цилиндра. Согласно методу для измерения геометрии профиля лазер поворачивается вокруг оси цилиндра из нормальной плоскости, причем угол к нормальной плоскости выбирается таким, чтобы оптическая ось камеры для съемки поверхностей, направленная на поверхность цилиндра, находилась в области скользящих углов отраженных лучей.
Недостатком данного устройства является: невозможность одновременного получения изображений объекта со всех сторон и, как следствие, невозможность вычисления параметров формы поверхности объекта в случае, если объект может непроизвольно смещаться относительно лазера или видеокамеры, что приведет к невозможности использования устройства для измерения формы поверхности частей тела человека. Также другим недостатком является то, что использование активной системы из лазера и видеокамеры требует обеспечения вращения объекта для получения изображений со всех его сторон, что дополнительно может внести погрешности в получаемые исходные данные, и как следствие, результат вычисления формы объекта.
Известен патент США 9418475, 16.08.2016, в котором представлены способ и система трехмерного моделирования тела человека на основе анализа его движений, жестикуляций и жестов. Указанный в патенте метод и принцип функционирования системы основаны на использовании видеосенсора с получением расстояний до объектов (глубины) и получении множества проекций тела человека в так называемых ключевых заранее заданных позах на фоне известного структурированного фона с последующим комплексированием полученных данных и построением на основе анализа формы тела человека.
Ключевым недостатком предложенного решения является низкая точность получения реальной формы тела человека, что вызвано следующими причинами: - используется сенсор, реализующий вычисление глубины (расстояния) до объекта с ограниченной и относительно невысокой точностью, предложенный метод обеспечит измерение поверхности одежды, но не тела человека; весьма не тривиален и сложен вопрос объединения данных с множества позиций вследствие наличия погрешностей и неизвестных взаимных позициях местоположений сенсоров (или неизвестных позициях одного сенсора, но в разных позициях).
Известна система для измерения трехмерной формы объектов внутри тела (Пат. США 9134420, 15.09.2015) Недостатком системы является использование ультразвукового принципа получения информации о дальности (глубине) точек анализируемого объекта и низкая точность, обусловленная высокой погрешностью ультразвукового метода, используемого в патенте и базирующегося на анализе сагиттальных плоскостей.
Известны метод и устройство трехмерного анализа и сопровождения частей тела, представленные в патенте США 8121368, 21.02.2012. Основным недостатком является использование томографов (компьютерных и магниторезонансных) для получения изображений, что является крайне дорогостоящим, технически сложным и избыточным решением, а также имеет узкую область применимости.
Известен также ряд решений, отраженных в, частности в патенте США №7794388 14.09.2010, направленных на построение трехмерной формы внутренних органов на основе различных методов. Однако, несмотря на то, что данные решения могут быть применены для решения задачи вычисления трехмерных параметров внешней поверхности тела, люди имеют ряд недостатков, которые не позволяют применять данные решения. В частности, представленные решения в указанных патентных источниках не обеспечат достаточной точности вычисления трехмерной поверхности человека, не обеспечивают требуемой скорости и требуют принципиального изменения, что в конечном итоге не позволяет их применять для решения задачи трехмерного восстановления формы анализируемой части поверхности человека.
Известны метод и устройство для реконструкции трехмерной поверхности тела (пат. США 7742557, 22.07.2010). Предложенные решение базируется на использовании двух оптико-электронных датчиков и данных, полученных рентгеноскопическим аппаратом или иным прибором на основе использования рентгеноскопического изображения.
Недостатком данного технического решения и метода является техническая сложность реализации предложенного решения, требующая использования и нескольких оптико-электронных датчиков оптического диапазона, и датчиков рентгеновского диапазона, что требует решения сложной технической задачи комплексирования информации разных оптических диапазонов и их последующего сопоставления. Кроме того, предложенное в указанном патенте решение ориентировано на анализ и вычисление трехмерной поверхности тела пациентов, что обуславливает их относительно стационарное положение, что также имеет практическое ограничение.
Известно изобретение (пат. США 7708691, 4.05.2010), в котором предложены способ и устройство для трехмерной реконструкции тела без использования контактных элементов или контактного механического воздействия на анализируемых участок тела. Основным недостатком данного решения является использование ультразвуковых датчиков для оценки формы поверхности анализируемого объекта, что обусловливает относительно низкую точность трехмерной реконструкции вследствие сложности реализации сопоставления, идентификации и коррекции искажений изображений с каждого из оптико-электронных датчиков. Кроме того, предложенное устройство конструктивно сложно, а именно имеет ряд элементов, которые требуют их корректного позиционирования и далее обработки данных от всех датчиков, что по указанным выше причинам приводит к сложности и высоким погрешностям.
Известно устройство и метод для сканирования трехмерной формы тела человека (пат. США 6345195) базирующиеся на использовании излучения диапазона 400…2000 нм и последующем анализе полученных в этом диапазоне изображений. Недостатком решения является низкая точность получаемых данных указанного оптического и теплового диапазонов, а также отсутствие представленных решений для сопоставления изображений при их получении с нескольких позиций датчиков, что приводит крайне низкой точности получаемых трехмерных данных.
Известно устройство моделирования и вычисления трехмерной формы тела человека на основе использования серии двумерных изображений (пат. США 9058663, 2015 г). Недостатком предложенного решения является то, что в рамках данного изобретения обеспечивается измерение параметров формы людей при наличии нескольких людей в кадре, это приводит к низкой точности вследствие перекрытия людей друг другом. Также, если даже в кадре будет расположен только один человек, то разработанные метод и устройство, вследствие их основанности на использовании двумерных некалиброванных снимков, не позволят реализовать расчет трехмерной формы объектов с высокой точностью, будет возможна лишь примерная оценка, что недостаточно для решения задачи высокоточного измерения формы поверхности человека.
Известно изобретение (пат. США 9235928, 16.01.2016) в котором представлены подходы восстановления трехмерной формы человека на основе анализа серии двумерных и трехмерных снимков человека в заранее заданных позах. Основными недостатками предложенного изобретения является то, что несмотря на то, что используются трехмерные картины для каждой из поз человека, именно это и обуславливает низкую точность вычисления полной (со всех сторон) формы части человека - головы, конечности, фрагмента поверхности вследствие технической и алгоритмической сложности сопоставления трехмерных координат точек полученных облаков точек с каждой их позиций, что приводит к высоким погрешностям и низкой точности.
Технический результат от использования заявляемого блока измерения заключается в повышении точности измерения формы поверхности анализируемого объекта за счет реализации бинокулярного зрения на основе нескольких пар стереоизображений анализируемой поверхности и наличия в конструкции системы вычислительного модуля, который содержит контроллер оптико-электронных датчиков, модуль нахождения характерных точек, модуль вычисления трехмерных координат, модуль сопоставления характерных точек, модуль построения облака точек, оперативное запоминающее устройство (ОЗУ), энергонезависимый информационный накопитель (далее по тексту - информационный накопитель), управляющий контроллер, модуль ввода-вывода, системную шину, четырех оптико-электронных датчиков, системы из четырех зеркал, где первое, второе, третье, четвертое зеркала размещены перпендикулярно плоскости, содержащей главные оптические оси первого, второго и третьего ОЭД таким образом, что первое и второе зеркала перпендикулярны друг другу, и размещены, соответственно, между первым и вторым ОЭД и между вторым ОЭД и третьим ОЭД.
Вычислительный модуль обеспечивает: обнаружение и сопоставление характерных точек на поверхности анализируемого объекта, выбор точек для решения задачи вычисления их трехмерных координат на основе бинокулярного принципа технического зрения, вычисление трехмерных координат каждой точки поверхности анализируемого объекта и построение аппроксимирующей поверхности, описывающей форму поверхности анализируемого объекта.
Система зеркал предназначена для обеспечения реализации наблюдения любой части поверхности анализируемого объекта с не менее, чем двух позиций наблюдения для обеспечения реализации трехмерного технического зрения на основе бинокулярного принципа реализации вычисления трехмерных координат точек поверхности. Описание второго технического решения
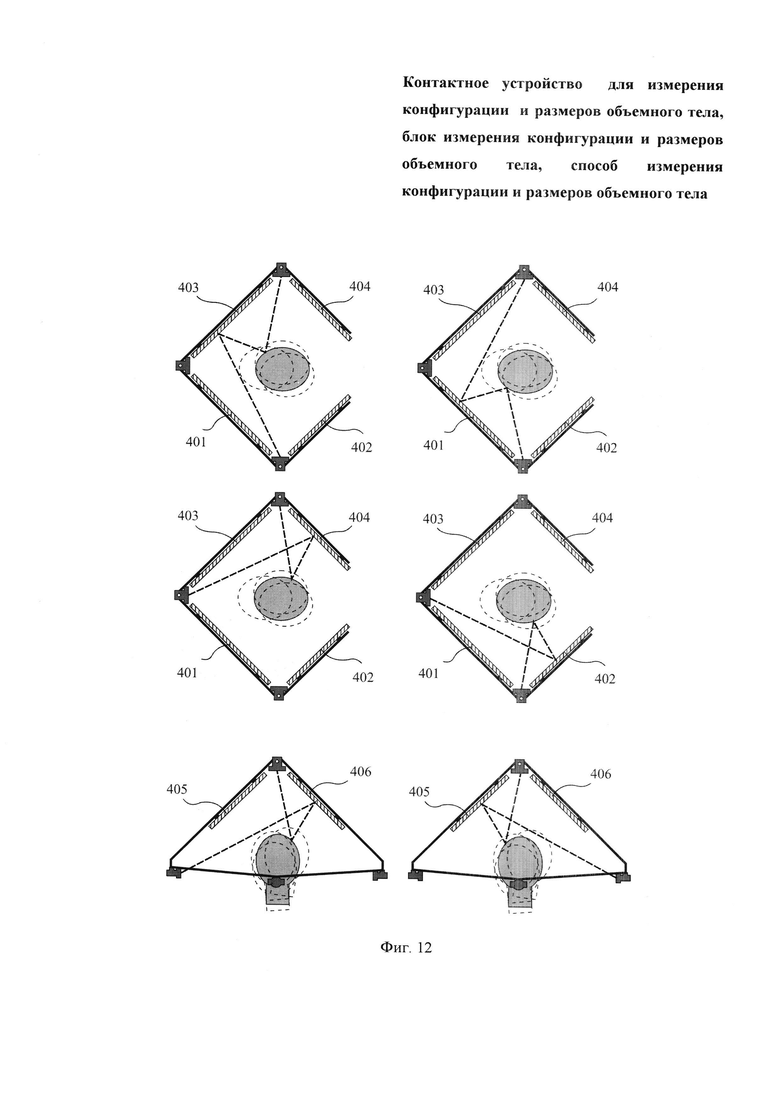
Графические материалы, иллюстрирующие второе заявляемое техническое решение, приведены на Фиг. 9 - Фиг. 12, где Фиг. 9 - функциональная схема блока измерения, Фиг. 10 - изображение взаиморасположения оптико-электронных датчиков и зеркал внутри блока измерения конфигурации и размеров исследуемого объекта, на Фиг. 11 -показано схематическое расположение измеряемого объекта относительно оптико-электронных датчиков, а на Фиг. 12 - схема прохождения лучей от точки поверхности объекта при формировании стереопары изображения различными способами с использованием зеркал и прямых прохождений луча от точки до оптико-электронных датчиков.
Блок измерения Блок измерения конфигурации и размеров объемного тела для измерения конфигурации и размеров объемного тела (далее по тексту - блок) состоит из: первого 401, второго 402, третьего 403, четвертого 404, пятого 405 и шестого 406 плоских зеркал, первого 201, второго 202, третьего 203 и четвертого 204 оптико-электронных датчиков, вычислительного модуля 500.
Вычислительный модуль 500 содержит контроллер оптико-электронных датчиков 501, модуль нахождения характерных точек 502, модуль вычисления трехмерных координат 503, модуль сопоставления характерных точек 504, модуль построения облака точек 505, оперативное запоминающее устройство (ОЗУ) 506, накопитель информации 508, управляющий контроллер 507, модуль ввода-вывода 509, системную шину 300. Причем вход-выход первого оптико-электронных датчика (ОЭД) подключен к первому входу-выходу контроллера ОЭД 201, вход-выход второго ОЭД 202 подключен ко второму входу-выходу контроллера ОЭД 501, вход-выход третьего ОЭД 203 подключен к третьему входу-выходу контроллера ОЭД 501, вход-выход четвертого ОЭД 204 подключен к четвертому входу-выходу контроллера ОЭД 501.
Первый, второй, третий и четвертый входы-выходы контроллера оптико-электронных датчиков 501 являются соответственно первым, вторым, третьим и четвертым входом-выходом вычислительного модуля.
Пятый вход-выход контроллера ОЭД 501 подключен к первому входу-выходу системной шины 300.
Второй вход-выход системной шины 300 соединен с входом-выходом модуля нахождения характерных точек 502.
Третий вход-выход системной шины 300 соединен с входом-выходом модуля вычисления трехмерных координат точек 504.
Четвертый вход-выход системной шины 300 соединен с входом-выходом модуля сопоставления характерных точек 504.
Пятый вход-выход системной шины 300 соединен с входом-выходом модуля построения облака точек 505.
Шестой вход-выход системной шины 300 соединен с входом-выходом ОЗУ 506.
Седьмой вход-выход системной шины 300 соединен входом-выходом управляющего контроллера 507.
Восьмой вход-выход системной шины 300 соединен входом-выходом энергонезависимого накопителя информации 508.
Девятый вход-выход системной шины 300 соединен с первым входом-выходом модуля ввода-вывода 509, второй вход-выход модуля ввода-вывода 509 является входом-выходом вычислительного модуля 500 и предназначен для обмена данными и командами с внешними устройствами.
Первый 201, второй 202, третий 203 и четвертый 204 ОЭД размешены друг относительно друга следующим образом: главные оптические оси [https://courses.cs.washington.edu/courses/cse455/09wi/Lects/lect16.pdf] первого 201, второго 202 и третьего 203 ОЭД-ов расположены в одной плоскости, а четвертый ОЭД 204 расположен так, что его главная оптическая ось перпендикулярна плоскости, в которой расположены главные оптические оси первого 201, второго 202 и третьего 203 ОЭД.
В свою очередь, первый 201 и третий 203 ОЭД ориентированы друг напротив друга и размещены на расстоянии L. Их главные оптические оси совпадают. Второй ОЭД 202 расположен так, что его главная оптическая ось перпендикулярна оптическим осям первого 201 и третьего 203 ОЭД и пересекает главные оптические оси первого 201 и третьего 203 ОЭД на равном расстоянии от первого 201 и второго 203 ОЭД.
Второй ОЭД 202 расположен на заданном расстоянии от первого 201 и третьего 203 ОЭД (таким образом, первый, второй и третий ОЭД расположены в вершинах равностороннего прямоугольного треугольника).
Первый 201 и третий 203 ОЭД - расположены в точке пересечения катетов и гипотенузы, а второй ОЭД 202 - в точке пересечения двух катетов.
Четвертый ОЭД 204 расположен так, что его главная оптическая ось проходит через точку пересечения главных оптических осей первого 201, второго 202 и третьего 203 ОЭД. Четвертый ОЭД 204 расположен на высоте Н относительно плоскости главных оптических осей первого 201, второго 202 и третьего 203 ОЭД-ов.
Первое 401, второе 402, третье 403, четвертое 404 зеркала размещены перпендикулярно плоскости, содержащей главные оптические оси первого 201, второго 202 и третьего 203 ОЭД таким образом, что первое 401 и второе 402 зеркала перпендикулярны друг другу, и размещены, соответственно, между первым 201 и вторым 202 ОЭД и между вторым 202 ОЭД и третьим 203 ОЭД.
Девятый вход-выход системной шины 300 соединен с первым входом-выходом модуля ввода-вывода 509, второй вход-выход модуля ввода-вывода 509 является входом-выходом вычислительного модуля 500 и предназначен для обмена данными и командами с внешними устройствами.
Первый 201, второй 202, третий 203 и четвертый 204 ОЭД размешены друг относительно друга следующим образом - главные оптические оси [https://courses.cs.washington.edu/courses/cse455/09wi/Lects/lect16.pdf] первого 201, второго 202 и третьего 203 ОЭД расположены в одной плоскости, а четвертый ОЭД 204 расположен так, что его главная оптическая ось перпендикулярна плоскости, в которой расположены главные оптические оси первого 201, второго 202 и третьего 203 ОЭД.
В свою очередь первый 201 и третий 203 ОЭД ориентированы друг напротив друга и размещены на расстоянии L. Их главные оптические оси совпадают. Второй ОЭД 202 расположен так, что его главная оптическая ось перпендикулярна оптическим осям первого 201 и третьего 203 ОЭД и пересекает главные оптические оси первого 201 и третьего 203 ОЭД на равном расстоянии от первого 201 и второго 203 ОЭД.
Второй ОЭД 202 расположен на заданном расстоянии от первого 201 и третьего 203 ОЭД (таким образом, первый, второй и третий ОЭД расположены в вершинах равностороннего прямоугольного треугольника).
Первый и третий ОЭД расположены в точках пересечения катетов и гипотенузы, а второй ОЭД 202 - в точке пересечения двух катетов.
Четвертый ОЭД 204 расположен так, что его главная оптическая ось проходит через точку пересечения главных оптических осей первого 201, второго 202 и третьего 203 ОЭД, при этом четвертый ОЭД 204 расположен на высоте Н относительно плоскости главных оптических осей первого 201, второго 202 и третьего 203 ОЭД.
Первое 401, второе 402, третье 403, четвертое 404 зеркала размещены перпендикулярно плоскости, содержащей главные оптические оси первого 201, второго 202 и третьего 203 ОЭД таким образом, что первое 401 и второе 402 зеркала перпендикулярны друг другу, и размещены, соответственно, между первым 201 и вторым 202 ОЭД и между вторым 202 ОЭД и третьим 203 ОЭД.
В свою очередь четвертое зеркало 404 перпендикулярно второму зеркалу 402, при этом второе зеркало 402 и четвертое зеркало 404 расположены с разных сторон относительно третьего ОЭД 203.
Третье зеркало 403 перпендикулярно первому зеркалу 401, при этом третье зеркало 403 и первое зеркало 401 расположены с разных сторон относительно первого ОЭД 201.
Пятое 405 зеркало размещено в плоскости, ориентированной под углом 45 градусов к плоскости, в которой размещены оптические оси первого 201, второго 202 и третьего 203 ОЭД, и расположено между третьим 203 и четвертым 204 ОЭД.
Шестое 406 зеркало размещено в плоскости, ориентированной под углом 45 градусов к плоскости, в которой размещены оптические оси первого 201, второго 202 и третьего 203 ОЭД и расположено между первым 201 и четвертым 204 ОЭД.
Рассмотрим работу блока на примере измерения формы и конфигурации поверхности головы человека.
Человек, обмер головы которого производится заявляемым блоком измерения, размещает свою голову примерно в центре предлагаемого устройства примерно на равном расстоянии от всех четырех - первого 201, второго 202, третьего 203 и четвертого 204 ОЭД. К поверхности головы небольшим избыточным давлением прижата оболочка, повторяющая форму головы, с нанесенным на оболочку специальным шаблоном графических структурированных изображений в виде точек.
Принцип функционирования блока заключается:
- в формировании нескольких стереопар изображений объекта со всех сторон наблюдения (стереопара - два кадра изображения с двух различных оптико-электронных датчиков, обеспечивающих в конечном итоге трехмерное восприятие области рабочей сцены с различных позиций);
- в одновременном получении стереопар изображений посредством использования пар оптико-электронных датчиков и зеркал,
- в вычислении трехмерных координат точек на поверхности головы на основе использования стереопар изображений,
- в формировании облака точек, полученного на основе анализа и выбора множества ранее вычисленных трехмерных координат точек на измеряемой поверхности.
Рассмотрим функционирование блока более подробно.
До начала работы блока он должен быть откалиброван, а именно приведены взаимные пространственные положения каждого из первого 201, второго 202, третьего 203 и четвертого 204 оптико-электронных датчиков в положения, указанные выше, и вычислены внутренние параметры каждого из перечисленных оптико-электронных датчиков, что обеспечит дальнейшее корректное вычисление трехмерных координат точек и решение целевой задачи вычисления трехмерной формы поверхности головы. Калибровка должна быть выполнена, например, по методике, представленной в [The calibration method for stereoscopic vision system [text] / M. Truphanov, V. Titov, S. Degtiarev // Machine graphics and vision. Vol.17, No. 4, 2008. - PP. 373-387.]
Процесс формирования нескольких стереопар изображений, обеспечивающих наблюдение головы человека со всех сторон, заключается в следующем.
Стереопары формируются в результате получения изображения одних и тех же точек на поверхности оболочки, облегающей голову, при прохождении изображения (под изображением в данном абзаце понимаем непрерывный поток оптического излучения от каждой точки поверхности головы). Далее везде в настоящем тексте изображением считаем массив цифровых данных, содержащих распределение цифровых значений цветовых компонент [Computer vision. 1 st Edition. Linda Shapiro, George Stockman, 200]) или напрямую от измеряемой поверхности до двух оптико-электронных датчиков или же при отражении изображения части измеряемой поверхности оболочки от одного из указанных зеркал 401-406 и далее поступающее на один или два из указанных оптико-электронных датчиков. Таким образом, различаем следующие условно пронумерованные стереопары и следующие модули рассматриваемого устройства, которые собственно и обеспечивают получение каждой стереопары (см. Фиг. 10):
- прямые изображения фрагмента измеряемой поверхности, поступающие напрямую на первый 201 и второй 202 ОЭД (далее назовем «стереопара №1»);
- прямые изображения фрагмента измеряемой поверхности, поступающие напрямую на третий 203 и второй 202 ОЭД (далее назовем «стереопара №2»);
- прямое изображение, поступающее на первый ОЭД 201 и изображение, прошедшее через первое зеркало 401 и поступившее на третий ОЭД 203 (назовем «стереопара №3»);
- прямое изображение, поступающее на третий ОЭД 203, и изображение, прошедшее через второе зеркало 402 и поступившее на первый ОЭД 201 (далее назовем «стереопара №4»);
- прямое изображение, поступившее на первый ОЭД 201 и изображение, прошедшее через третье зеркало 403 и поступившее на второй ОЭД 202 (далее назовем «стереопара №5»);
- прямое изображение, поступившее на третий ОЭД 203 и изображение, прошедшее через четвертое зеркало 403 и поступившее на второй ОЭД 202 (далее назовем «стереопара №6»);
- прямое изображение, поступившее на четвертью (верхний) ОЭД 204 и изображение, прошедшее через пятое зеркало 405 и поступившее на первый ОЭД 201 (далее назовем «стереопара №7»);
- прямое изображение, поступившее на четвертый (верхний) ОЭД 204 и изображение, прошедшее через шестое зеркало 406 и поступившее на третий ОЭД 203 (далее назовем «стереопара №8»).
Таким образом, перечисленные выше стереопары 1-8 обеспечивают получение любого участка измеряемой поверхности не менее, чем с двух различных позиций, что и обеспечивает в дальнейшем согласно принципа функционирования устройства расчет трехмерных координат точек в любой части измеряемой поверхности. В случае измерения параметров поверхности конечностей (стоп, голени, ног, рук), верхний оптико-электронный датчик 204 не требуется.
Рассмотрим процесс функционирования устройства далее. Изображение различных частей измеряемой поверхности формируются первым ОЭД 201, вторым ОЭД 202, третьим ОЭД 203 и четвертым ОЭД 204. С входов выходов первого 201, второго 202, третьего 203, четвертого 204 ОЭД изображения поступают соответственно на первый, второй, третий и четвертый входы-выходы контроллера оптико-электронных датчиков 501, который последовательно пиксель за пикселем записывает кадр с каждого из перечисленных оптико-электронных датчиков через свой пятый вход-выход, через первый вход-выход системной шины 300, через шестой вход-выход системной шины 300, через вход-выход ОЗУ 506 в ОЗУ 506. Каждый из полученных кадров хранится в ОЗУ 506 с привязкой по времени получения в своей области памяти.
Управляющий котроллер 507 подает команду через свой вход-выход на седьмой вход-выход системной шины 300 через второй вход-выход системной шины 300 через вход-выход модуля нахождения характерных точек 502 в модуль нахождения характерных точек 502. Модуль нахождения характерных точек 502 анализирует последовательно изображения [Lindeberg, Т. Feature Detection with Automatic Scale Selection // International Journal of Computer Vision, v. 30 n. 2, Nov. 1998, P. 79-116], записанные в ОЗУ 506 следующим образом:
- находит характерные точки на каждом кадре изображения (здесь под характерными точками понимаются точки, которые заранее специально нанесены на эластичную оболочку),
- вычисляет двумерные координаты каждой характерной точки, при этом дополнительно помечает в памяти ОЗУ 506, точка наблюдается напрямую (т.е. непосредственно оптико-электронный датчик получает изображение этой точки с поверхности эластичной оболочки) или точка отражается через одно из указанных зеркал, что впоследствии дает возможность модулю вычисления трехмерных координат 503 корректно рассчитать трехмерные координаты этой точки.
Таким образом, в результате в ОЗУ 506 хранятся единовременно полученные изображения участков поверхности головы, наблюдаемые через первое, второе, третье, четвертое, пятое, шестое зеркала 401, 402, 403, 404, 405, 406 и напрямую - первым 201, вторым 202, третьим 203, четвертым 204 ОЭД и обнаруженные характерные точки с привязкой к источнику получения изображения каждой точки.
Вычисление трехмерных координат точек на измеряемой поверхности на основе использования стереопар изображений осуществляет далее модуль вычисления трехмерных координат 503.
Для этого производится обработка данных, полученных на предыдущих этапах обработки модулем сопоставления характерных точек 504, и далее модулем вычисления трехмерных координат 503 вычисляются трехмерные координаты каждой точки. Модуль сопоставления характерных точек 504 считывает координаты и признак принадлежности конкретной стереопаре текущей анализируемой области рабочей сцены (области измеряемой поверхности) из ОЗУ 506: управляющий контроллер 507 со своего входа-выхода через седьмой вход-выход системной шины 300, далее через свой четвертый вход-выход подает команду о необходимости поиска соответствия хранящихся в ОЗУ 506 точек модулем сопоставления характерных точек 504. Модуль сопоставления характерных точек 504 через свой вход-выход, четвертый вход-выход системной шины 300, шестой вход-выход системной шины 300 и вход-выход ОЗУ 506 считывает последовательно координаты каждой найденной ранее характерной точки и признак принадлежности этой точки одной из перечисленных выше стереопар. Далее модуль сопоставления характерных точек таким же только что рассмотренным образом считывает координаты точек из ОЗУ 506, которые принадлежат смежному изображению, и среди которых потенциально может быть найдена эта же самая текущая анализируемая точка, но на смежном изображении (поясним понятие «смежное изображение», которое применяется здесь и далее - в рамках настоящего описания: пусть есть два кадра изображений с разных ОЭД, которые образуют одну из перечисленных выше стереопар. Тогда смежное изображение - это то изображение, которое в рамках этой стереопары дополняет другое изображение этой же стереопары и содержит изображение реального участка измеряемой поверхности с другой позиции в рамках этой же стереопары). Таким образом, на данном этапе модуль сопоставления точек 504 ищет сопоставление единственно текущей характерной точки среди множества характерных точек на смежном кадре изображения этой стереопары. В результате данного сопоставления в случае успеха поиска смежной точки либо формируется стереопара двумерных координат одной и той же точки, которая далее записывается в ОЗУ 506, либо точка помечается как не имеющая соответствия и исключается из обработки в рамках анализа данной стереопары (но не исключается из анализа остальных стереопар). В случае нахождения стереопары, модуль сопоставления характерных точек 504 передает через свой вход-выход, через четвертый и далее шестой входы-выходы системной шины 300 на вход-выход ОЗУ 506 результаты сопоставления характерной точки, которые содержат две пары двумерных координат и соответствие этих пар координат изображениям одной из перечисленных выше стереопар.
После обработки модулем сопоставления характерных точек 502 всех характерных точек, хранящихся в ОЗУ 506, и формирования множества стереопар, модуль сопоставления характерных точек 504 формирует сообщение о завершении обработки данных, поступающее через вход-выход модуля сопоставления характерных точек. Далее - на четвертый и далее - на седьмой входы-выходы системной шины 300 и далее - на вход управляющего контроллера 507. В свою очередь, управляющий контроллер 507 подает команду через системную шину 300 модулю вычисления трехмерных координат, который последовательно для каждой из сформированных и записанных в ОЗУ 506 стереопар вычисляет трехмерные координаты точки в локальной системе координат именно этой текущей стереопары, преобразует вычисленные трехмерные координаты из локальной системы координат в единую систему координат, выбранную глобальной для рассматриваемого устройства (согласно данного изобретения глобальная система координат совпадает по декартовым осями с локальной системой координат второго оптико-электронного датчика 202). Рассчитанные трехмерные глобальные координаты точек модуль вычисления трехмерных координат передает через свой вход-выход на третий вход-выход системной шины 300, на шестой вход-выход системной шины 300 в ОЗУ 506.
Далее модуль вычисления трехмерных координат 503 уведомляет модуль построения облака точек 505 о завершении своей работы и разрешении работы модуля построения облака точек 505. Соответствующее сообщение передается через вход-выход модуля вычисления трехмерных координат, через третий и пятый входы-выходы системной шины 300, через вход выход модуля построения облака точек 505 в модуль построения облака точек 505.
После этого модуль построения облака точек 505 начинает формирование облака точек, полученного на основе анализа и выбора множества ранее вычисленных трехмерных координат точек на эластичной оболочке, прижатой к измеряемой поверхности головы.
Для этого модуль построения облака точек 505 последовательно, точку за точкой (здесь идет речь о считывании глобальных трехмерных координат точек), считывает из ОЗУ 506 и, если эта точка ранее этим же модулем построения облака точек 505 не была обработана, ищет п ближайших к ней точек. Затем модуль построения облака точек 505 переходит к анализу новой точки, выбираемой среди найденных ближайших точек, и так до тех пор, пока не будут обработаны все хранящиеся в ОЗУ 506 точки. Процесс считывания параметров точек модуль построения облака точек 505 выполняет через свой вход-выход через пятый вход-выход системной шины 300, через шестой вход-выход системной шины 300 и через вход-выход ОЗУ 506. В результате, на данном этапе обработки в ОЗУ 506 хранятся связи между ближайшими точками в трехмерном пространстве.
Финальным этапом построения облака точек является этап, при котором модуль построения облака точек 505 повторно анализирует координаты характерных точек в трехмерном пространстве и связи между ближайшими соседями точек и формирует единую триангуляционную сетку на основе исключения дублирующих связей между характерными точками и восстановления недостающих связей. Сформированные параметры связей между характерными точками в трехмерном пространстве записываются в ОЗУ 506. Для этого модуль построения облака точек 505 записывает в ОЗУ 506 все рассчитанные вектора (связи), определяющие связь между двумя точками в трехмерном пространстве на поверхности оболочки, при этом параметры векторов модуль построения облака точек 505 передает через свой вход-выход на пятый вход-выход и далее - на шестой вход выход системной шины 300. И далее - через вход-выход ОЗУ 506 указанные данные записываются в ОЗУ 506. Одновременно с этим, полученные данные о взаимном расположении точек, представляющие собой вектора, определяющие связи между соседними точками, и трехмерные мировые координаты точек на поверхности оболочки записываются в накопитель информации 508.
На заключительном этапе работы блока рассчитанные параметры трехмерной поверхности могут быть переданы во внешнее устройство через модуль ввода-вывода 509. Для этого модуль ввода-вывода 509 из накопителя информации 508 считывает трехмерные координаты точек на поверхности эластичной оболочки и через вход-выход накопителя информации 508, через восьмой вход-выход и через девятый вход-выход системной шины 300 и далее через первый вход-выход модуля ввода-вывода 509 передает через второй вход-выход модуля ввода-вывода 509 данные о трехмерных координатах точек поверхности шапки и о связях между ними во внешнее устройство.
В качестве первого 401, второго 402, третьего 403, четвертого 404, пятого 405 и шестого 406 зеркал используются плоские стеклянные зеркала размером примерно 280×420 мм.
В качестве первого 201, второго 202, третьего 203 и четвертого 204 оптико-электронных датчиков могут быть применены портативные видеокамеры Logitech С920, С905, или иные, обеспечивающие получение изображений размером кадра не менее 1600×1200 пикселей, обеспечивающих угол обзора не менее 52 градусов и частоту формирования изображений не менее 24 кадров/с.
Контроллер оптико-электронных датчиков 501 представляет собой типичный usb-контроллер, дополнительно оснащенный функцией регистрации времени приема очередного кадра.
Модуль нахождения характерных точек 502, модуль вычисления трехмерных координат 503, модуль сопоставления характерных точек 504, управляющий контроллер 507 могут быть реализованы на базе программируемой логической интегральной схемы, например, Xilinx Virtex 5 с логической емкостью, достаточной для реализации указанных блоков. Модуль построения облака точек 505 целесообразно реализовать на базе сигнального процессора, микро-ЭВМ или высокоскоростного микроконтроллера. Также данный модуль может быть реализован на программируемой логической схеме. ОЗУ 506 представляет собой модуль динамического ОЗУ со схемой управления, емкостью не менее 4 Гбайт, что определяется объемом исходных изображений и объемом промежуточных данных.
В качестве энергонезависимого накопителя информации 508 может быть использован любой так называемый «жесткий диск» (hard disk drive) объемом памяти не менее 256 Гб. Рекомендуется использование SSD диска, или аналогичного ему.
Третье самостоятельное техническое решение - способ измерения конфигурации и размеров объемного тела
Заявляемый способ решает задачу выполнения высокоточных измерений формы и размеров объемного тела и на их основе позволяет создавать реконструкции 3-х мерной (объемной) поверхности тела или отдельных его частей, или подбирать из готовых изделий наиболее подходящие для индивидуума изделия.
Возможность одновременного измерения размеров и конфигурации объемного тела появилась сначала при снятии слепков с тела и последующего измерения получившихся слепков, а позднее - при использовании средств сканирования поверхностей на расстоянии. Трехмерное боди-сканирование применяется и в медицине.
Известны способы быстрого обмера большого количества человек для получения точного компьютерного изображения и индивидуального пошива посредством боди-сканирования.
Из уровня техники известно техническое решение «СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ТЕЛА», запатентованное как US 2016203361 (А1) - 2016-07-14.
Система и метод измерения формы тела индивидуума по имеющимся входным данным, таким как изображения или масштабные снимки, где тело может представляться в одной или нескольких позах, захваченных в разное время. Целостная форма тела вычисляется во всех позах. Тело может быть представлено в минимальной облегающей одежде или в обычной одежде, при этом описанный способ производит измерение формы тела под одеждой. Скрытые или недостаточно открытые участки тела обнаруживаются с помощью классификации изображений и способа подгонки, приспособленного для исправления каждого участка индивидуально. Части формы тела представляются параметрически и сопоставляются с аналогичными частями на основе сходства формы и других особенностей. Стандартные измерения извлекаются с помощью параметрических или непараметрических функций формы тела. Недостатком данного технического решения является: то, что данный способ не позволяет создать точную виртуальную поверхность тела под одеждой, если во время съемок нет полного прилегания одежды к телу.
Известен метод создания лекал по меркам частей тела и метод изготовления бумажных лекал (см. патент JP2006169705 (А) - 2006-06-29), заключающийся в наклеивании на измеряемую поверхность полосок клейкой ленты, чувствительных к давлению, до получения на измеряемой поверхности маски, а затем выполняют разрезание этой маски для получения выкройки.
Общий признак, который используется в данном и в заявляемом автором способах: создание за счет избыточного давления тактильного контакта между средством измерения и измеряемой поверхностью. Недостаток способа - использование полосок клейкой ленты, которые приклеиваются на измеряемую поверхность. Это неудобный и негигиеничный способ. На его выполнение тратится много времени.
Наиболее близким к заявляемому способу является способ по патенту RU (11) 2551731. Из описания к патенту (19) RU (11) 2551731 (13) С1 (51) МПК А41Н 1/02 (2006.01) G06Q 50/10 (2012.01) известен способ виртуального подбора одежды, заключающийся в фотографировании субъекта, для которого подбирается одежда, в передаче изображений в вычислительное устройство; в вычислении параметров тела, для которого при фотографировании субъект одет в эластичный шаблон с эталонной разметкой, который используется при вычислении антропометрических данных измеренного субъекта. В способе выполняется определение фактических размеров всех параметров тела, при этом шаблон содержит эластичную основу, растяжимую в пределах одного типоразмера, с нерастяжимыми графическими элементами определенной формы и размера, закрепленными на внешней поверхности эластичной основы, обладающими формоустойчивостью и нерастяжимостью во всех направлениях и служащими размерным эталоном, при этом форма, количество и расположение нерастяжимых графических элементов выбраны в соответствии с типоразмером шаблона. Недостатком способа является неудобство, связанное с тем, что данный способ предназначен, преимущественно для измерения поверхности тела, а не лица и головы.
Для его выполнения требуется наличие специализированных приспособлений в виде комбинезона с разметкой, который выбран из определенного размерного ряда. На надевание комбинезона и раздевание у человека уходит достаточно большой период времени. Виртуальная примерка одежды, выбранной в результате использования данного способа, не воссоздает тактильные ощущения от контакта с примеряемой одеждой, или обувью.
Технический результат от использования заявляемого способа заключается в том, что он более точен, удобен для практического применения, легок в использовании, по сравнению с известными, а также обеспечивает массовое тиражирование на основе недорогих серийно выпускаемых компонентов заявляемого устройства. Повышение точности выполнения способа обусловлено тем, что в качестве блока измерения используется блок, оптико-электронный датчики которого захватывают всю исследуемую поверхность тела, к которой плотно - за счет повышенного давления, прилегает оболочка с нанесенной маркировкой, что позволяет более точно вычислить расстояние между камерами и поверхностью, и, соответственно, построить виртуальную модель данной поверхности; также повышение точности обусловлено тем, что регистрация (получение изображений) всей поверхности объекта производится единовременно (в один и тот же момент времени), что исключает потенциальные ошибки, обусловленные возможными непроизвольными движениями объекта относительно оптико-электронных датчиков.
При этом для человека, в то время, когда выполняются измерения, создается возможность уточнять размеры в соответствии со своими тактильными ощущениями за счет изменения степени сжатия измеряемой поверхности.
Универсальность применения заявляемого способа определяется тем, что любое объемное тело можно идентифицировать как совокупность точек в пространстве, считанную посредством описанного выше устройства. Внедрение способа позволит унифицировать измерения при производстве различных высокоточных изделий, имеющих индивидуальную посадку - шлемов, очков, париков, обуви, одежды, ортезов.
Удобство измерения, его высокая точность и быстрота достигается за счет того, что на объект измерения не требуется надевать специальный костюм, а изменение давления внутри оболочки устройства позволяет быстро готовить устройство к измерениям, оперативно проводить измерения и легко извлекать объект исследования из устройства после измерения.
Описание способа измерения конфигурации и размеров объемного тела с использованием заявляемого контактного устройства
Для измерения используется устройство, состоящее из одного или нескольких модулей, внутри которых имеются: эластичные оболочки, на внутренней поверхности которых имеется маркировка, блок измерения, а также один или несколько компрессоров, создающих необходимое давление внутри модулей. Способ измерения конфигурации и размеров объемного тела заключающийся в том, что измеряют расстояние между оптико-электронными датчиками в установленном блоке измерения и поверхностью эластичной оболочки, на которой нанесена разметка. Для этого:
- первоначально в оболочке/оболочках устройства при помощи компрессора создают такое давление, чтобы размер оболочки изменился до такого размера, когда исследуемая поверхность может поместиться в область измерения (во внутрь, или снаружи устройства);
- исследуемую поверхность объемного тела помещают в пространство к поверхности эластичной оболочки устройства, на которую нанесена разметка, при этом исследуемую поверхность можно разместить или снаружи, или внутри устройства;
- внутри устройства посредством компрессора создают давление, при котором оболочка плотно прилегает к поверхности исследуемого тела;
- блок измерения считывает информацию о положении разметки на стороне оболочки, прилегающей к измеряемому объекту, при этом при снятии мерок с областей мягких тканей на ногах, теле или на голове человека учитываются его тактильные ощущения, например, степень комфортности, которая регулируется посредством изменения давления;
- полученные данные обрабатываются в блоке измерения и на их основе формируется виртуальная модель исследуемой поверхности объемного тела;
- заканчивается процесс тем, что внутри устройства создают давление, при котором исследуемая поверхность тела перестает контактировать с устройством и исследуемый объект извлекают из устройства, или устройство извлекается из исследуемого объекта.
Примеры выполнения способа.
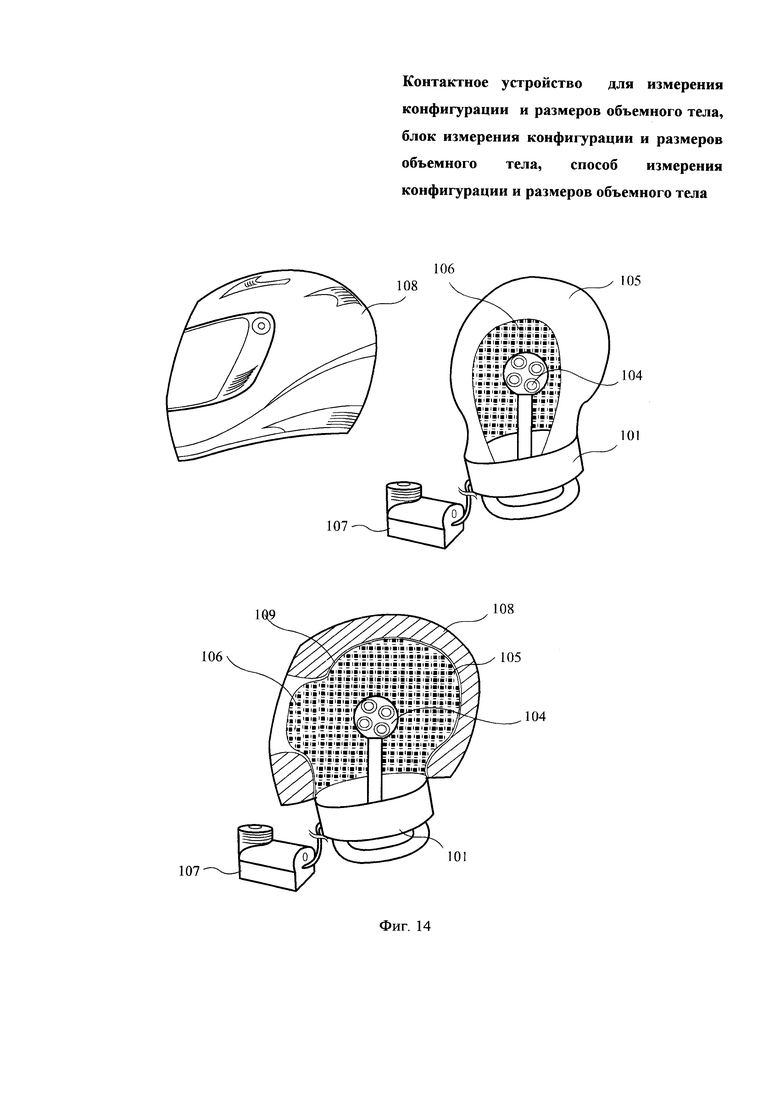
1. Выполняется измерение размера и формы поверхности головы для создания или подбора шлема для автогонщика - см. Фиг. 13. Для этой цели используется контактное устройство для измерения конфигурации и размеров объемного тела, соединенное с компрессором. Устройство состоит из корпуса 101, блока измерения конфигурации 104, встроенного в корпус 101, эластичной оболочки 105, на которой нанесена разметка 106, по форме и размерам приближенной к голове, герметично закрепленной на корпусе 101. Пользователь готовит устройство к проведению измерения. Для этого компрессором 107 удаляется часть воздуха в пространстве между корпусом и оболочкой, что позволяет оболочке увеличиться в размерах за счет растяжимости. После достижения необходимого размера оболочки пользователь свободно помещает голову в оболочку. Далее компрессором создается давление, при котором оболочка уменьшается и комфортно прилегает к измеряемой поверхности. Включается блок измерения конфигурации 104, который выполняет измерения и вычисляет трехмерные параметры формы измеряемой головы. После завершения измерения, включается компрессор 107 и откачивает воздух из корпуса. Человек снимает устройство с головы и устройство снова готово к использованию.
2. Выполняется измерение размера и формы поверхности шлема для автогонщика, чтобы выбрать один из множества имеющихся на рынке шлемов для человека, параметры головы которого предварительно измерены (см. пример 1) - см. Фиг. 14. Для этой цели используется контактное устройство для измерения конфигурации и размеров объемного тела, соединенное с компрессором. Устройство состоит из корпуса 101, блока измерения конфигурации 104, встроенного в корпус 101, эластичной оболочки 105, на которой нанесена разметка 106, по форме и размерам приближенной к голове, герметично закрепленной на корпусе 101. Пользователь готовит устройство к проведению измерения. Для этого компрессором 107 удаляется часть воздуха в пространстве между корпусом и оболочкой, что позволяет оболочке уменьшиться в размерах за счет растяжимости. После достижения необходимого размера оболочки пользователь свободно помещает оболочку внутрь шлема.
На следующем этапе включается подача воздуха компрессором в пространство между корпусом и оболочкой. Создается давление воздуха внутри корпуса, повышенное, относительно атмосферного, за счет чего размер оболочка увеличивается до размера, при котором она прижимается к поверхности шлема.
Далее включается в работу блок измерения конфигурации и размеров объемного тела. Сигналы, поступающие с его выхода, записываются во внешнем запоминающем устройстве и обрабатываются в заданный вид.
После проведения измерения воздух из устройства частично удаляют при помощи компрессора, оболочка сжимается и устройство удаляют из шлема. После этого устройство вновь готово к использованию.
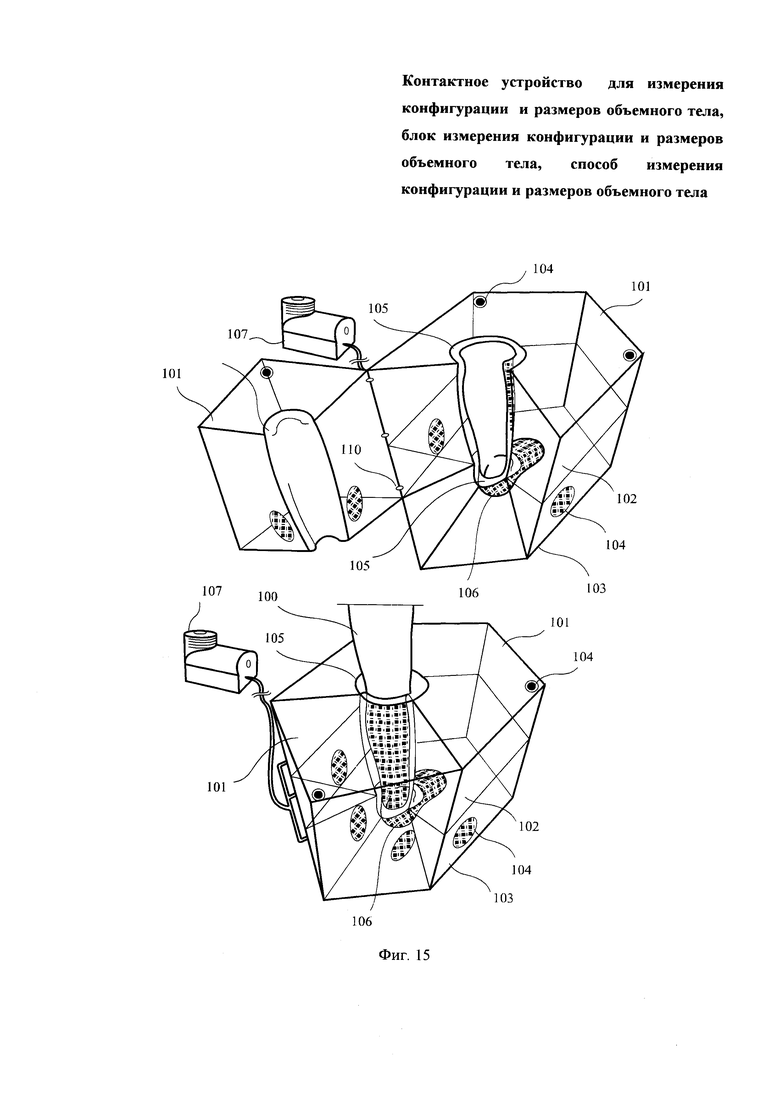
3. Выполняется измерение поверхности ноги в области ступни и голени. Для этой цели используется разъемное контактное устройство для измерения конфигурации и размеров объемного тела, соединенное с компрессором. Устройство состоит из двух модулей, имеющих между собой подвижное соединение. Каждый модуль состоит из корпуса, блока измерения конфигурации, помещенного в корпус, эластичной оболочки, по форме и размерам приближенной к определенной части ноги, герметично закрепленной на корпусе. Первый модуль - неподвижный и содержит две оболочки. Одна оболочка по форме и размеру приближена к ступне, вторая приближена по форме к передней поверхности голени. Оболочка второго модуля - подвижного, приближена по форме к задней поверхности голени.
Пользователь готовит устройство к проведению измерения. Для этого рассоединяются соединенные между собой модули, компрессором удаляется часть воздуха в пространстве между корпусами и оболочками, что позволяет оболочкам увеличиться в размерах за счет растяжимости. После достижения необходимого размера оболочек пользователь свободно помещает ногу внутрь устройства, а именно, ступня и передняя часть голени помещается в первый модуль. Далее подвижный модуль соединяют с неподвижным.
На следующем этапе включается подача воздуха компрессором в пространство между корпусами и оболочками. Создается давление воздуха внутри корпусов, повышенное, относительно атмосферного, за счет чего оболочки увеличиваются до размеров, при котором они прижимаются к поверхности ноги.
Далее включается в работу блок измерения конфигурации и размеров объемного тела. Сигналы, поступающие с его выхода, записываются во внешнем запоминающем устройстве и обрабатываются в заданный вид.
После проведения измерения воздух из устройства частично удаляют при помощи компрессора, оболочки сжимаются, соединение между модулями размыкается и удаляют ногу из устройства. После этого устройство вновь готово к использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИРТУАЛЬНОГО ПОДБОРА ОДЕЖДЫ | 2014 |
|
RU2551731C1 |
| ОБЪЕМНЫЙ ДИСПЛЕЙ И СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2526901C1 |
| СПОСОБ ОПТИКО-ЭЛЕКТРОННОЙ ДИАГНОСТИКИ ТРОМБОЗА ГЛУБОКИХ ВЕН ГОЛЕНИ | 2006 |
|
RU2314026C2 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ПОМУТНЕНИЯ ХРУСТАЛИКА ГЛАЗА И ДИАГНОСТИКИ КАТАРАКТЫ | 2015 |
|
RU2594944C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2441283C2 |
| Устройство для задания конфигурации области | 1978 |
|
SU752382A1 |
| ОБЪЕМНЫЙ ДИСПЛЕЙ | 2018 |
|
RU2718777C2 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ДВУХМЕРНЫХ ВИДОВ В ОБЪЕМНЫХ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЯХ | 2013 |
|
RU2526752C1 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКИХ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ С АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ ПРЕДМЕТНОГО ПРОСТРАНСТВА В РЕАЛЬНОМ ВРЕМЕНИ | 2012 |
|
RU2490819C1 |






Изобретение относится к вычислению параметров измеряемой поверхности. Контактным устройством для измерения конфигурации и размеров объемного тела измеряют расстояние между оптико-электронными датчиками в установленном блоке измерения и поверхностью эластичной оболочки, на которой нанесена разметка. Полученную информацию обрабатывают. Строят виртуальную модель, повторяющую конфигурацию, размеры и форму исследованной поверхности. Обеспечивается повышение точности измерений поверхности исследуемого объекта. 3 н. и 13 з.п. ф-лы, 15 ил., 3 пр.
1. Контактное устройство для измерения конфигурации и размеров объемного тела, содержащее блок измерения конфигурации и размеров объемного тела и герметичную и эластичную оболочку с нанесенной на ней разметкой, отличающееся тем, что оно выполнено из по меньшей мере одного модуля, соединенного с по меньшей мере одним компрессором, при этом модуль содержит корпус, а герметичная и эластичная оболочка герметично соединена со стенками корпуса, при этом блок измерения конфигурации и размеров объемного тела жестко связан со стенками корпуса и выполнен с возможностью измерения конфигурации и размеров объемного тела, при котором герметичная и эластичная оболочка, наложенная на исследуемую поверхность в зонах контакта, повторяет конфигурацию этой поверхности, при этом разметка нанесена на оболочку в зонах контакта со стороны установки блока измерения конфигурации и размеров объемного тела.
2. Контактное устройство по п. 1, отличающееся тем, что конфигурации поверхности герметичной и эластичной оболочек соответствуют конфигурации измеряемого объемного тела и приближены к нему по размерам.
3. Контактное устройство по п. 1, отличающееся тем, что конфигурации поверхности герметичной и эластичной оболочек не соответствуют пропорциям и конфигурации измеряемого объемного тела, при этом они выполнены одинаковыми между собой.
4. Контактное устройство по п. 1, отличающееся тем, что упомянутые модули имеют шарнирное соединение между собой.
5. Контактное устройство по п. 1, отличающееся тем, что упомянутые модули имеют замковое соединение между собой.
6. Контактное устройство по п. 1, отличающееся тем, что соединение модулей с компрессором выполнено через стенку или стенки корпуса.
7. Контактное устройство по п. 1, отличающееся тем, что соединение модулей с компрессором выполнено через эластичную или эластичные оболочки.
8. Контактное устройство по п. 1, отличающееся тем, что разметка на поверхности оболочки выполнена в виде точек.
9. Контактное устройство по п. 1, отличающееся тем, что разметка на поверхности оболочки выполнена в виде цветных линий.
10. Контактное устройство по п. 1, отличающееся тем, что разметка на поверхности оболочки выполнена в виде маркеров.
11. Контактное устройство по п. 1, отличающееся тем, что оболочка выполнена из эластичной ткани, покрытой силиконом.
12. Контактное устройство по п. 1, отличающееся тем, что оболочка выполнена из эластичной ткани, покрытой латексом.
13. Контактное устройство по п. 1, отличающееся тем, что корпус выполнен из пластмассы.
14. Блок измерения конфигурации и размеров объемного тела для контактного устройства для измерения конфигурации и размеров объемного тела, содержащий систему зеркал и вычислительный модуль, содержащий оптико-электронные датчики, контроллер оптико-электронных датчиков, модуль нахождения характерных точек, модуль вычисления трехмерных координат, модуль сопоставления характерных точек, модуль построения облака точек, оперативное запоминающее устройство, энергонезависимый накопитель информации, управляющий контроллер, модуль ввода-вывода, системную шину, причем вход-выход первого оптико-электронного датчика подключен к первому входу-выходу контроллера оптико-электронного датчика, вход-выход второго оптико-электронного датчика подключен ко второму входу-выходу контроллера оптико-электронного датчика, вход-выход третьего оптико-электронного датчика подключен к третьему входу-выходу контроллера оптико-электронного датчика, вход-выход четвертого оптико-электронного датчика подключен к четвертому входу-выходу контроллера оптико-электронного датчика, первый, второй, третий и четвертый входы-выходы контроллера оптико-электронных датчиков являются соответственно первым, вторым, третьим и четвертым входом-выходом вычислительного модуля, пятый вход-выход контроллера оптико-электронного датчика подключен к первому входу-выходу системной шины, второй вход-выход системной шины соединен с входом-выходом модуля нахождения характерных точек, третий вход-выход системной шины соединен с входом-выходом модуля вычисления трехмерных координат точек, четвертый вход-выход системной шины соединен с входом-выходом модуля сопоставления характерных точек, пятый вход-выход системной шины соединен с входом-выходом модуля построения облака точек, шестой вход-выход системной шины соединен с входом-выходом оперативного запоминающего устройства, седьмой вход-выход системной шины соединен с входом-выходом управляющего контроллера, восьмой вход-выход системной шины соединен с входом-выходом энергонезависимого накопителя информации, девятый вход-выход системной шины соединен с первым входом-выходом модуля ввода-вывода, второй вход-выход модуля ввода-вывода является входом-выходом вычислительного модуля и предназначен для обмена данными и командами с внешними устройствами, первый, второй, третий и четвертый оптико-электронные датчики размещены друг относительно друга так, что главные оптические оси первого, второго и третьего оптико-электронных датчиков расположены в одной плоскости, а четвертый оптико-электронный датчик расположен так, что его главная оптическая ось перпендикулярна плоскости, в которой расположены главные оптические оси первого, второго и третьего оптико-электронных датчиков, первый и третий оптико-электронные датчики ориентированы друг напротив друга и размещены на расстоянии L, при этом их главные оптические оси совпадают, второй оптико-электронный датчик расположен так, что его главная оптическая ось перпендикулярна оптическим осям первого и третьего оптико-электронного датчика и пересекает главные оптические оси первого и третьего оптико-электронного датчика на равном расстоянии от первого и третьего оптико-электронного датчика, так, что первый, второй и третий оптико-электронные датчики расположены в вершинах равностороннего прямоугольного треугольника, первый и третий оптико-электронные датчики - в точках пересечения катетов и гипотенузы, а второй оптико-электронный датчик - в точке пересечения двух катетов, четвертый оптико-электронный датчик расположен так, что его главная оптическая ось проходит через точку пересечения главных оптических осей первого, второго и третьего оптико-электронных датчиков и четвертый оптико-электронный датчик расположен на высоте Н относительно плоскости главных оптических осей первого, второго и третьего оптико-электронных датчиков, первое, второе, третье, четвертое зеркала размещены перпендикулярно плоскости, содержащей главные оптические оси первого, второго и третьего оптико-электронных датчиков таким образом, что первое и второе зеркала перпендикулярны друг другу, и размещены соответственно между первым и вторым оптико-электронными датчиками и между вторым и третьим оптико-электронными датчиками, в свою очередь четвертое зеркало перпендикулярно второму зеркалу, при этом второе зеркало и четвертое зеркало расположены с разных сторон относительно третьего оптико-электронного датчика, третье зеркало перпендикулярно первому зеркалу, при этом третье и первое зеркала расположены с разных сторон относительно первого оптико-электронного датчика, пятое зеркало размещено в плоскости, ориентированной под углом 45 градусов к плоскости, в которой размещены оптические оси первого, второго и третьего оптико-электронных датчиков, и расположено между третьим и четвертым оптико-электронными датчиками, шестое зеркало размещено в плоскости, ориентированной под углом 45 градусов к плоскости, в которой размещены оптические оси первого, второго и третьего оптико-электронных датчиков и расположено между первым и четвертым оптико-электронными датчиками.
15. Способ измерения конфигурации и размеров объемного тела с использованием контактного устройства по п. 1, включающий измерение расстояния между оптико-электронным датчиками блока измерения конфигурации и размеров объемного тела и поверхностью герметичной и эластичной оболочки, на которую нанесена разметка, обработку полученной информации и построение виртуальной модели исследованной поверхности, при этом для измерения расстояния между оптико-электронным датчиками блока измерения конфигурации и размеров объемного тела и поверхностью герметичной и эластичной оболочки создают посредством компрессора первоначальное давление в герметичной и эластичной оболочке упомянутого устройства, для помещения исследуемой поверхности в область измерения помещают исследуемую поверхность объемного тела в пространство к поверхности герметичной и эластичной оболочки упомянутого устройства, при этом исследуемую поверхность помещают снаружи или внутри устройства, и создают необходимое давление внутри него, для создания непосредственного контакта между исследуемой поверхностью тела и выше упомянутым устройством, осуществляют считывание посредством блока измерения конфигурации и размеров объемного тела информации о положении маркеров на размеченной стороне герметичной и эластичной оболочки, обработку ее, создавая цифровую модель, повторяющую конфигурацию, размеры и форму исследуемой поверхности, и освобождение исследуемой поверхности объемного тела от контакта с герметичной и эластичной оболочкой, понижая давление внутри нее.
16. Способ по п. 15, отличающийся тем, что степень облегания поверхности исследуемого тела оболочкой регулируют за счет изменения давления внутри модулей.
| СПОСОБ ВИРТУАЛЬНОГО ПОДБОРА ОДЕЖДЫ | 2014 |
|
RU2551731C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМА КОНЕЧНОСТИ | 1990 |
|
RU2019129C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| US 5850222 A, 15.12.1998 | |||
| US 5832139 A, 03.11.1998. | |||

