Предлагаемое изобретение относится к области обеспечения единства измерений плоского угла, конкретно к геометрическим измерениям, и может использоваться для определения метрологических характеристик геодезических угломерных приборов (ГУП), к которым относятся теодолиты и тахеометры электронные, при их поверке в местах эксплуатации, методом непосредственного сличения с рабочим эталоном плоского угла (РЭПУ) путем обеспечения равенства геометрических фигур, формируемых визирными осями зрительных труб РЭПУ и ГУП и системой плоских зеркал на основе закона отражения света.
Известен способ передачи единицы плоского угла ГУП в горизонтальной и вертикальной плоскостях, заключающийся в том, что поверяемым ГУП измеряются горизонтальные и вертикальные углы, образованные визирными марками, установленными в горизонтальной и вертикальной плоскостях на расстоянии от 100 до 250 м от поверяемого ГУП, действительные значения углов которых определены РЭПУ ([1] ГОСТ Р ИСО 17123-3 Оптика и оптические приборы. Методики полевых испытаний геодезических и топографических приборов. Национальный стандарт Российской Федерации. М.: Стандартинформ, 2011. - стр. 3 - 9).
Недостатками известного способа, снижающими его точность и возможность применения, являются:
зависимость от погодных условий (атмосферные осадки, температура окружающей среды, относительная влажность воздуха, солнечное излучение), влияющих на стабильность визирных марок и действительные значения горизонтальных и вертикальных углов;
зависимость от особенностей ландшафта местности (наличие растительности, пересеченность местности), препятствующих оборудованию рабочего места для поверки ГУП в местах их применения, что связано с большими трудозатратами на подготовительные мероприятия, выполняемые для обеспечения условий проведения поверочных работ (вырубка кустарника, спил свисающих веток деревьев, размещение визирных марок и т.д.);
зависимость от времени суток, влияющих на видимость визирных марок и, как следствие, точность наведения на них.
Это приводит к значительному снижению точности передачи единицы плоского угла и ограниченным функциональным возможностям применения известного способа при неблагоприятных погодных условиях, сложном ландшафте, а также в условиях недостаточной видимости в зависимости от времени суток.
Наиболее близким по сущности к предлагаемому изобретению является способ передачи единицы плоского угла геодезическим угломерным приборам в горизонтальной и вертикальной плоскостях, заключающийся в том, что погрешность измерений горизонтальных и вертикальных углов поверяемым ГУП определяется в соответствии с методикой его поверки путем последовательных многократных измерений контрольных горизонтальных и вертикальных плоских углов, воспроизводимых зрительными трубами - коллиматорами с внутренней или внешней фокусировкой, расположенных в горизонтальной и вертикальной плоскостях, визирные оси которых пересекаются в точке, совпадающей с пересечением визирной и горизонтальной осей поверяемого ГУП ([2] Спиридонов А.И., Кулагин Ю.Н., Кузьмин М.В. Поверка геодезических приборов. М.: Недра, 1981. - стр. 35-43, который выбран в качестве прототипа.
Недостатками известного способа, выбранного в качестве прототипа, являются:
значения контрольных горизонтальных и вертикальных плоских углов, воспроизводимых с помощью визирных осей зрительных труб коллиматорного стенда, определяются методом прямых измерений с помощью РЭПУ при его периодической поверке [3], однако, в процессе эксплуатации известного устройства под воздействием вибраций и механических воздействий, визирные оси зрительных труб подвержены смещению, что снижает точность передачи единицы плоского угла ГУП в местах их эксплуатации;
известный способ реализуется с помощью коллиматорных стендов [2], которые не обеспечивают определение метрологических характеристик ГУП аэрологических шаропилотных из-за их конструктивных особенностей [4].
Указанные недостатки приводят к снижению точности передачи единицы плоского угла ГУП в местах их эксплуатации и сужению области применения коллиматорных стендов, что ограничивает функциональные возможности применения данного способа в отношении поверки ГУП с точностью измерений углов от 2'' до 5'', а также поверки ГУП аэрологических шаропилотных.
Целью предлагаемого изобретения является повышение точности передачи единицы плоского угла ГУП в горизонтальной и вертикальной плоскостях в местах их эксплуатации и расширение области применения.
Поставленная цель достигается тем, погрешность измерений горизонтальных и вертикальных углов поверяемым ГУП определяют в соответствии с методикой его поверки путем последовательных многократных измерений контрольных горизонтальных и вертикальных плоских углов, воспроизводимых зрительными трубами - коллиматорами с внутренней или внешней фокусировкой, расположенных в горизонтальной и вертикальной плоскостях, визирные оси которых пересекаются в точке, совпадающей с пересечением визирной и горизонтальной осей поверяемого ГУП, отличающийся тем, что для воспроизведения контрольных горизонтальных и вертикальных плоских углов используют зрительную трубу РЭПУ, сетку нитей которой подсвечивают источником света через матовый экран, и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, причем, геометрические центры плоских зеркал равноудалены от линии пересечения горизонтальной и вертикальной плоскостей, являющейся продолжением визирных осей зрительных труб РЭПУ и ГУП, которые в соответствии с законом отражения света, определяющим равенство углов падения и отражения луча света, обеспечивают отражение изображения сетки нитей РЭПУ для воспроизведения соответствующих контрольных горизонтальных и вертикальных плоских углов.
Таким образом, предлагаемый способ характеризуется следующими отличительными признаками по сравнению с прототипом: воспроизведение контрольных горизонтальных и вертикальных плоских углов осуществляется с помощью одной зрительной трубы РЭПУ и системы парных плоских зеркал, расположенных в горизонтальной и вертикальной плоскостях и реализующих равенство углов падения и отражения луча света в соответствии с законом отражения света.
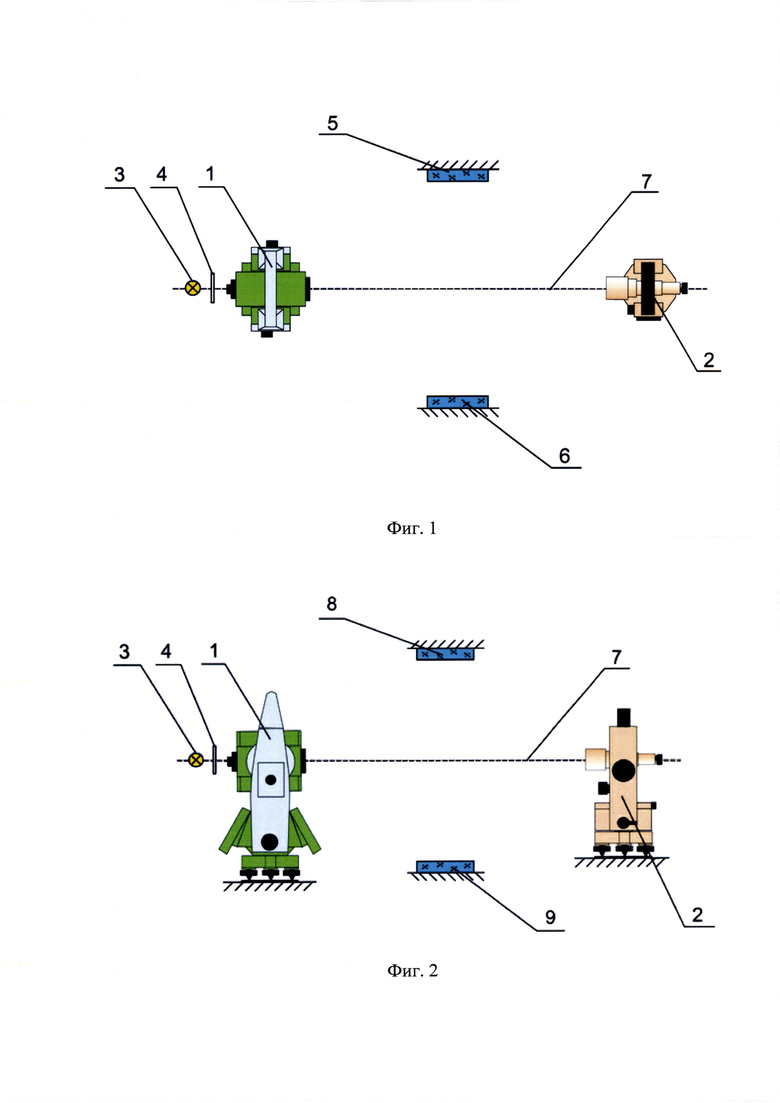
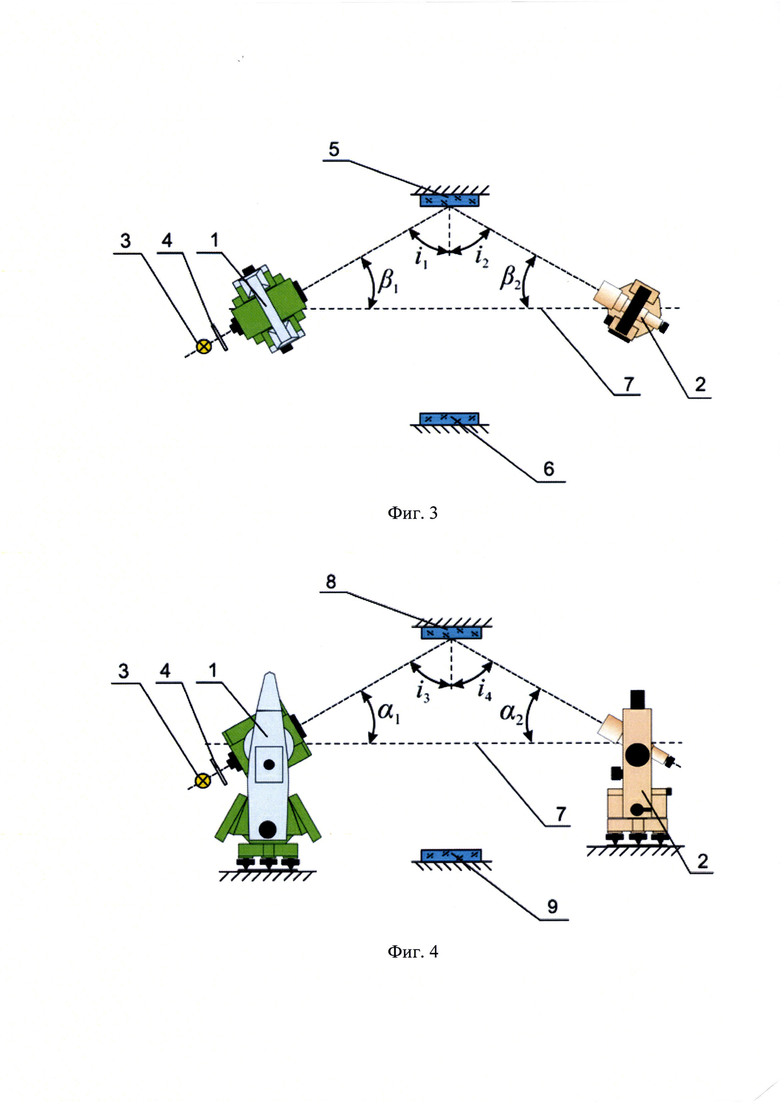
На фиг. 1 и 2 приведена схема наведения зрительной трубы РЭПУ на зрительную трубу ГУП в горизонтальном положении зрительных труб (виды сверху и сбоку соответственно), а на фиг. 3 и 4 - схемы наведения зрительной трубы поверяемого ГУП на зрительную трубу РЭПУ через плоское зеркало горизонтальной (вид сверху) и вертикальной (вид сбоку) плоскостей соответственно, где 1 - РЭПУ, 2 - поверяемый ГУП, 3 - источник света, 4 - матовый экран, 5 и 6 - плоские зеркала горизонтальной плоскости, 7 - линия, соединяющая визирные оси РЭПУ и ГУП, 8 и 9 - плоские зеркала вертикальной плоскости.
Передача единицы плоского угла в горизонтальной плоскости по предлагаемому способу производится следующим образом.
Зрительная труба РЭПУ 1 наводится на объектив зрительной трубы поверяемого ГУП 2 (фиг. 1 и 2) в положение, при котором сетки нитей зрительных труб РЭПУ 1 и ГУП 2 совмещаются и образуется линия 7, соединяющая визирные оси зрительных труб РЭПУ 1 и ГУП 2. Для подсветки сетки нитей зрительной трубы РЭПУ 1 используются матовый экран 4 и источник света 3 в виде съемного светодиода. В данном положении с РЭПУ 1 и поверяемого ГУП 2 снимаются показания. После чего, алидада РЭПУ 1 поворачивается на значение контрольного горизонтального угла β1 (фиг. 3), при этом, алидада поверяемого ГУП 2 также поворачивается на значение контрольного угла в противоположную сторону β2. Изображение сетки нитей зрительной трубы РЭПУ 1, подсвеченное источником света 3, падающее под углом i1, отразится от поверхности зеркала 5 (фиг. 3) под тем же углом i2 (i1 = i2) относительно нормали зеркала 5 и попадет в зрительную трубу поверяемого ГУП 2. Сетка нитей зрительной трубы поверяемого ГУП 2 точно совмещается с изображением сетки нитей зрительной трубы РЭПУ 1, после чего с ГУП 2 и РЭПУ 1 снимаются показания. Погрешность измерений горизонтального угла поверяемым ГУП 2 определяется как разность угла β1, воспроизведенного РЭПУ 1, и угла β2, измеренного ГУП 2 с учетом угла отклонения нормали зеркала 5 от линии 7, соединяющей визирные оси зрительных труб РЭПУ 1 и ГУП 2. Аналогично, для определения погрешности измерений горизонтального угла поверяемым ГУП 2 вместо зеркала 5 может использоваться зеркало 6 (фиг. 3).
Передача единицы плоского угла в вертикальной плоскости по предлагаемому способу производится следующим образом.
Зрительная труба РЭПУ 1 наводится на объектив зрительной трубы поверяемого ГУП 2 (фиг. 1 и 2) в положение, при котором сетки нитей зрительных труб РЭПУ 1 и ГУП 2 совмещаются и образуется линия 7, соединяющая визирные оси зрительных труб РЭПУ 1 и ГУП 2. Для подсветки сетки нитей зрительной трубы РЭПУ 1 и поверяемого ГУП 2 используются матовый экран 4 и источник света 3 в виде съемного светодиода. В данном положении с РЭПУ 1 и поверяемого ГУП 2 снимаются показания. После чего, зрительная труба РЭПУ 1 наклоняется на значение контрольного вертикального угла α1 (фиг. 4), при этом, зрительная труба поверяемого ГУП 2 также наклоняется на значение контрольного вертикального угла α2. Изображение сетки нитей зрительной трубы РЭПУ 1, подсвеченное источником света 3, падающее под углом i3, отразится от поверхности зеркала 8 (фиг. 4) под тем же углом i4 (i3 = i4) относительно нормали зеркала 8 и попадет в зрительную трубу поверяемого ГУП 2. Сетка нитей зрительной трубы поверяемого ГУП 2 точно совмещается с изображением сетки нитей зрительной трубы РЭПУ 1, после чего, с ГУП 2 и РЭПУ 1 снимаются показания. Погрешность измерений вертикального угла (положительного относительно линии 7 и плоскости горизонта) поверяемым ГУП 2 определяется как разность угла α1, воспроизведенного РЭПУ 1, и угла α2, измеренного ГУП 2, с учетом угла отклонения нормали зеркала 8 от линии 7. Аналогично, для определения погрешности измерений вертикального угла (отрицательного относительно линии 7 и плоскости горизонта) поверяемым ГУП 2 вместо зеркала 8 используется зеркало 9 (фиг. 4).
Для воспроизведения различных значений контрольных горизонтальных и вертикальных плоских углов, установленных методиками поверки конкретных ГУП, изменяют положения РЭПУ 1 и ГУП 2 относительно друг друга путем их перемещения вдоль линии 7, соединяющей визирные оси РЭПУ 1 и ГУП 2 (сближение или удаление РЭПУ 1 и ГУП 2), и/или используют парные горизонтальные 5, 6 и вертикальные 8, 9 плоские зеркала совместно, то есть контрольные горизонтальные и вертикальные плоские углы формируются между зеркалами 5, 6 и 8, 9 соответственно.
Предлагаемый способ реализован в установке для поверки геодезических угломерных приборов ([5] патент RU 186485, МКП G01B 5/24), конструкция которой позволяет дополнительно определять метрологические характеристики ГУП аэрологических шаропилотных.
Для оценки эффективности предлагаемого способа проводились экспериментальные исследования на установке для поверки геодезических угломерных приборов [5], которые показали, что точность передачи единицы плоского угла ГУП в горизонтальной и вертикальной плоскостях в местах их эксплуатации может быть повышена до 40%.
Источники информации
1. ГОСТ Р ИСО 17123-3 Оптика и оптические приборы. Методики полевых испытаний геодезических и топографических приборов. Национальный стандарт Российской Федерации. М.: Стандартинформ, 2011. - стр. 3 - 9.
2. Спиридонов А.И. Поверка геодезических приборов / А.И. Спиридонов, Ю.Н. Кулагин, М.В. Кузьмин. - М.: Недра, 1981. - 158 с.
3. Описание типа средств измерений № 24077-02 от 20.09.2002 г. «Стенды универсальные коллиматорные ВЕГА УКС-М».
4. Описание типа средств измерений № 3592-73 от 15.05.1973 г. «Теодолиты аэрологические АШТ».
5. Патент на полезную модель RU 186485, МКП G01B 5/24. Установка для поверки геодезических угломерных приборов/ М.А. Конюхов (Россия) - Заявка №2018129987, 17.08.2018; Опубл. 22.01.2019. Бюл. № 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ЕДИНИЦЫ ПЛОСКОГО УГЛА ВЫСОКОТОЧНЫМ ГЕОДЕЗИЧЕСКИМ УГЛОМЕРНЫМ ПРИБОРАМ | 2024 |
|
RU2831792C1 |
| Устройство для поверок геодезических приборов | 1978 |
|
SU763682A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2320961C1 |
| Устройство для поверки геодезических приборов | 1983 |
|
SU1093895A2 |
| Устройство для измерения угла наклона | 1989 |
|
SU1703969A1 |
| Устройство для поверки нивелира | 1990 |
|
SU1812424A1 |
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ВЕРТИКАЛЬНЫХ УГЛОВЫХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ ГЕОДЕЗИЧЕСКИХ ПРИБОРОВ | 2006 |
|
RU2349877C2 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
Предлагаемое изобретение относится к области обеспечения единства измерений плоского угла, конкретно к геометрическим измерениям, и может использоваться для определения метрологических характеристик геодезических угломерных приборов (ГУП), к которым относятся теодолиты и тахеометры электронные. Способ передачи единицы плоского угла геодезическим угломерным приборам (ГУП), при котором погрешность измерений горизонтальных и вертикальных углов поверяемым ГУП определяют в соответствии с методикой его поверки путем последовательных многократных измерений контрольных горизонтальных и вертикальных плоских углов, воспроизводимых зрительными трубами - коллиматорами с внутренней или внешней фокусировкой, расположенных в горизонтальной и вертикальной плоскостях, визирные оси которых пересекаются в точке, совпадающей с пересечением визирной и горизонтальной осей поверяемого ГУП. При этом для воспроизведения контрольных горизонтальных и вертикальных плоских углов используют зрительную трубу рабочего эталона плоского угла (РЭПУ), сетку нитей которой подсвечивают источником света через матовый экран, и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, причем геометрические центры плоских зеркал равноудалены от линии пересечения горизонтальной и вертикальной плоскостей, являющейся продолжением визирных осей зрительных труб РЭПУ и ГУП. Технический результат – повышение точности передачи единицы плоского угла ГУП в местах их эксплуатации и расширение области применения предложенного способа. 4 ил.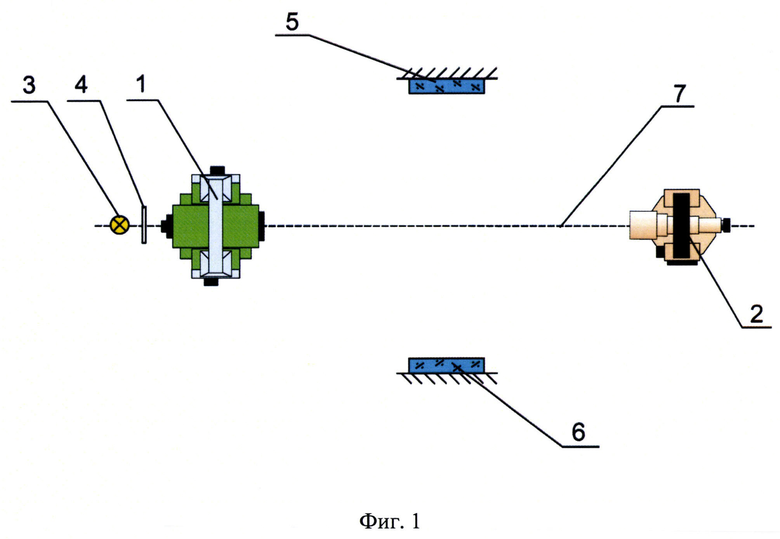
Способ передачи единицы плоского угла геодезическим угломерным приборам (ГУП), при котором погрешность измерений горизонтальных и вертикальных углов поверяемым ГУП определяют в соответствии с методикой его поверки путем последовательных многократных измерений контрольных горизонтальных и вертикальных плоских углов, воспроизводимых зрительными трубами - коллиматорами с внутренней или внешней фокусировкой, расположенных в горизонтальной и вертикальной плоскостях, визирные оси которых пересекаются в точке, совпадающей с пересечением визирной и горизонтальной осей поверяемого ГУП, отличающийся тем, что для воспроизведения контрольных горизонтальных и вертикальных плоских углов используют зрительную трубу рабочего эталона плоского угла (РЭПУ), сетку нитей которой подсвечивают источником света через матовый экран, и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, причем геометрические центры плоских зеркал равноудалены от линии пересечения горизонтальной и вертикальной плоскостей, являющейся продолжением визирных осей зрительных труб РЭПУ и ГУП, которые в соответствии с законом отражения света, определяющим равенство углов падения и отражения луча света, обеспечивают отражение изображения сетки нитей РЭПУ для воспроизведения соответствующих контрольных горизонтальных и вертикальных плоских углов.
| 0 |
|
SU186485A1 | |
| Устройство для поверок геодезических приборов | 1978 |
|
SU763682A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| ПРЕОБРАЗОВАТЕЛЬ ТРЕХФАЗНОГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ | 2013 |
|
RU2534041C1 |
| EP 2937665 A1, 28.10.2015. | |||

