Предлагаемое изобретение относится к области обеспечения единства измерений плоского угла, конкретно к геометрическим измерениям, и может использоваться для определения метрологических характеристик геодезических угломерных приборов (ГУП), к которым относятся теодолиты и тахеометры электронные, при их поверке в местах эксплуатации, методом непосредственного сличения с правильной многогранной призмой (далее - многогранная призма) путем обеспечения равенства геометрических фигур, формируемых нормалями отражающих поверхностей граней многогранной призмы, визирной осью зрительной трубы ГУП и системой плоских зеркал на основе закона отражения света.
Известен способ передачи единицы плоского угла ГУП в горизонтальной и вертикальной плоскостях, заключающийся в том, что поверяемым ГУП измеряются плоские горизонтальные и вертикальные углы, образованные визирными марками, установленными в горизонтальной и вертикальной плоскостях на расстоянии от 100 до 250 м от поверяемого ГУП, действительные значения углов которых определены рабочим эталоном плоского угла (РЭПУ) [1].
Недостатками известного способа являются:
зависимость от погодных условий (атмосферные осадки, температура окружающей среды, относительная влажность воздуха, солнечное излучение), влияющих на стабильность визирных марок и действительные значения горизонтальных и вертикальных углов;
зависимость от особенностей ландшафта местности (наличие растительности, пересеченность местности), препятствующих оборудованию рабочего места для поверки ГУП в местах их применения, что связано с большими трудозатратами на подготовительные мероприятия, выполняемые для обеспечения условий проведения поверочных работ (вырубка кустарника, спил свисающих веток деревьев, размещение визирных марок и т.д.);
зависимость от времени суток, влияющих на видимость визирных марок и, как следствие, точность наведения на них;
недостаточная погрешность воспроизведения плоских горизонтальных и вертикальных углов для поверки высокоточных ГУП.
Это приводит к значительному снижению погрешности передачи единицы плоского угла и ограниченным функциональным возможностям применения известного способа при неблагоприятных погодных условиях, сложном ландшафте, а также в условиях недостаточной видимости в зависимости от времени суток.
Известен способ передачи единицы плоского угла ГУП в горизонтальной и вертикальной плоскостях, заключающийся в том, что погрешность ГУП определяют сравнением углов поворота алидады и углов наклона зрительной трубы с углами правильной многогранной призмы [2].
Недостатками известного способа, являются:
необходимость использования большого количества приспособлений для установки на алидаде и зрительной трубе поверяемого ГУП юстировочного столика с правильной многогранной призмой, в виду различной конструкции ГУП;
отсутствие возможности установки приспособления с правильной многогранной призмой на алидаде и зрительной трубе поверяемого ГУП из-за конструктивных особенностей некоторых ГУП;
влияние дополнительной инструментальной погрешности на погрешность передачи единицы плоского угла, возникающей вследствие воздействия нагрузки, создаваемой правильной многогранной призмой с приспособлениями, на алидаду и зрительную трубу поверяемого ГУП.
Наиболее близким по сущности к предлагаемому изобретению является способ передачи единицы плоского угла геодезическим угломерным приборам в горизонтальной и вертикальной плоскостях, заключающийся в том, что для воспроизведения контрольных горизонтальных и вертикальных плоских углов используют зрительную трубу рабочего эталона плоского угла (РЭПУ), сетку нитей которой подсвечивают источником света через матовый экран, и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, причем, геометрические центры плоских зеркал равноудалены от линии пересечения горизонтальной и вертикальной плоскостей, являющейся продолжением визирных осей зрительных труб РЭПУ и ГУП, которые в соответствии с законом отражения света, определяющим равенство углов падения и отражения луча света, обеспечивают отражение изображения сетки нитей РЭПУ для воспроизведения соответствующих контрольных горизонтальных и вертикальных плоских углов [3].
Недостатком известного способа, является отсутствие возможности передачи единицы плоского угла в горизонтальной и вертикальной плоскостях высокоточным ГУП в местах их эксплуатации, в виду недостаточного соотношения доверительной границы абсолютной погрешности РЭПУ с погрешностью поверяемых ГУП.
Указанный недостаток ограничивает функциональные возможности применения данного способа в отношении поверки высокоточных ГУП с погрешностью измерений горизонтальных и вертикальных углов от 0,5″ до 1″.
Целью предлагаемого изобретения является уменьшение погрешности передачи единицы плоского угла поверяемым ГУП в горизонтальной и вертикальной плоскостях в местах их эксплуатации и расширение его функциональных возможностей в отношении поверки высокоточных ГУП.
Поставленная цель достигается тем, что погрешность измерений горизонтальных и вертикальных углов поверяемым ГУП определяют в соответствии с методикой его поверки путем последовательных многократных измерений контрольных горизонтальных и вертикальных плоских углов, воспроизводимых зрительной трубой РЭПУ, сетку нитей которой подсвечивают источником света через матовый экран, и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, которые в соответствии с законом отражения света, определяющим равенство углов падения и отражения луча света, обеспечивают отражение изображения сетки нитей РЭПУ для воспроизведения соответствующих контрольных горизонтальных и вертикальных плоских углов, отличающийся тем, что для воспроизведения контрольных горизонтальных и вертикальных плоских углов совместно используют измерительные поверхности граней многогранной призмы и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, причем, геометрические центры плоских зеркал равноудалены от линии пересечения горизонтальной и вертикальной плоскостей, являющейся продолжением нормалей к отражающим поверхностям граней многогранной призмы и визирной оси зрительной трубы поверяемого ГУП, которые в соответствии с законом отражения света, определяющим равенство углов падения и отражения луча света, обеспечивают отражение изображения сетки нитей поверяемого ГУП для измерения соответствующих контрольных горизонтальных и вертикальных плоских углов измерительными поверхностями граней многогранной призмы.
Таким образом, предлагаемый способ характеризуется следующими отличительными признаками по сравнению с прототипом: воспроизведение контрольных горизонтальных и вертикальных плоских углов осуществляется с помощью измерительных поверхностей граней многогранной призмы и системы парных плоских зеркал, расположенных в горизонтальной и вертикальной плоскостях и реализующих равенство углов падения и отражения пучка лучей, испускаемого зрительной трубой поверяемого ГУП, в соответствии с законом отражения света.
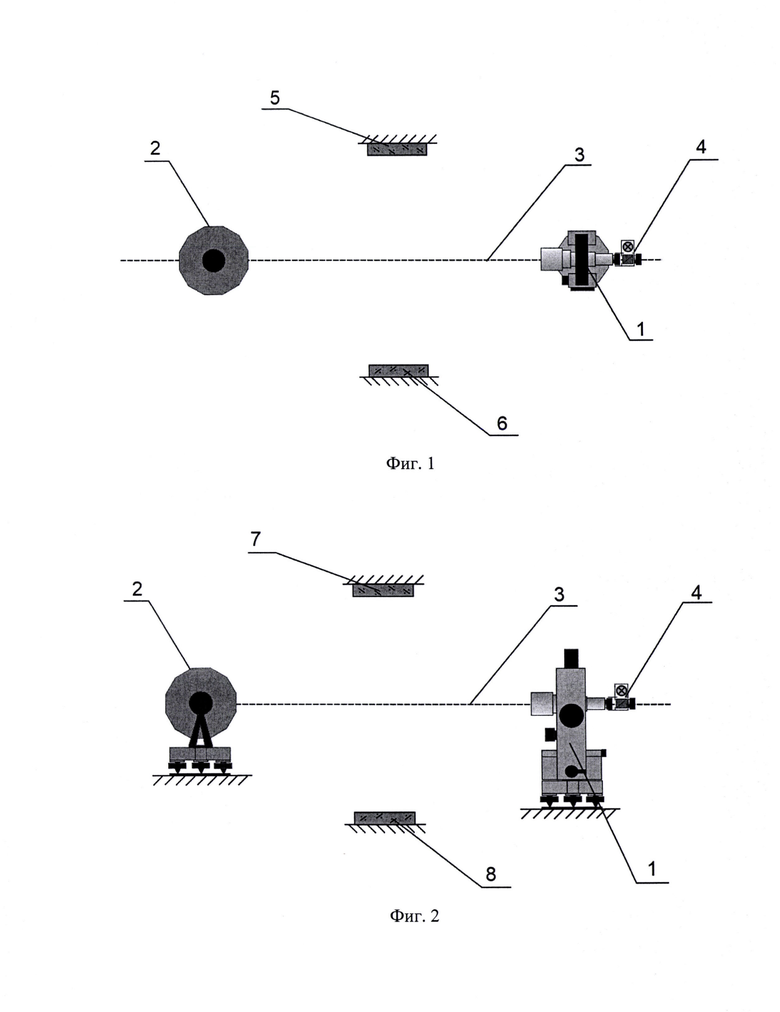
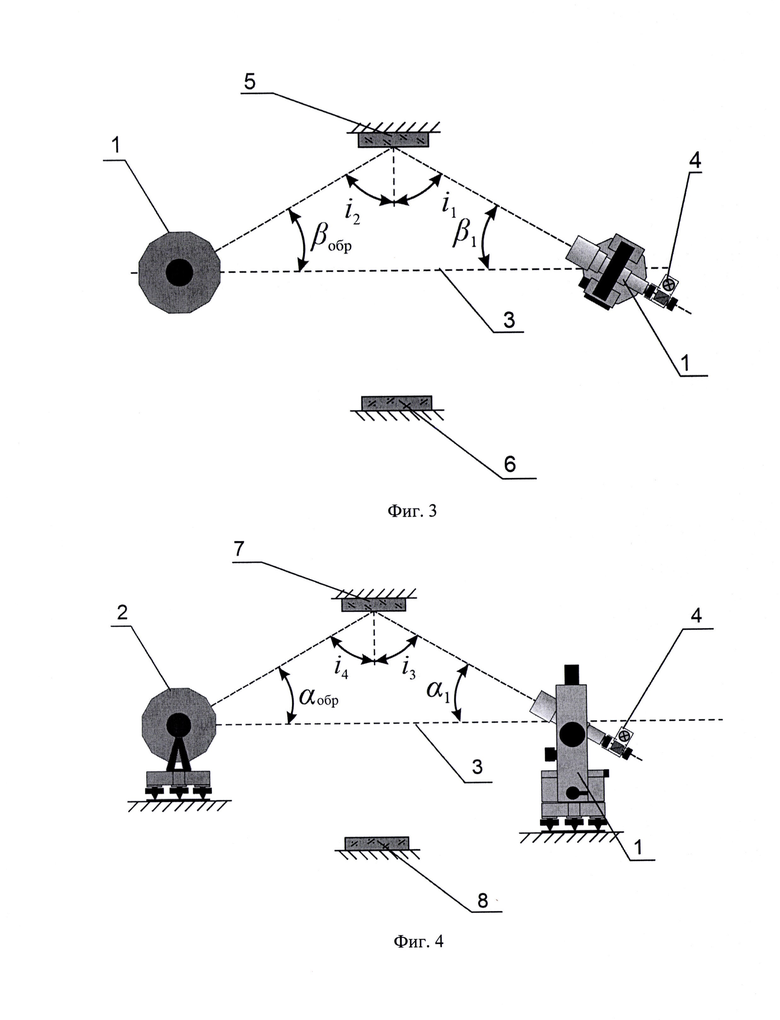
На фиг. 1 и 2 приведена схема наведения зрительной трубы поверяемого ГУП на измерительные поверхности граней многогранной призмы в горизонтальном положении зрительной трубы поверяемого ГУП (виды сверху и сбоку соответственно), а на фиг. 3 и 4 – схемы наведения зрительной трубы поверяемого ГУП измерительные поверхности граней многогранной призмы через плоское зеркало горизонтальной (вид сверху) и вертикальной (вид сбоку) плоскостей соответственно, где 1 – поверяемый ГУП, 2 – многогранная призма, 3 – линия, соединяющая визирную ось поверяемого ГУП и нормаль к отражающей поверхности грани многогранной призмы, 4 – коллимационная насадка с источником света, 5 и 6 – плоские зеркала горизонтальной плоскости, 7 и 8 – плоские зеркала вертикальной плоскости.
Передача единицы плоского угла в горизонтальной плоскости по предлагаемому способу производится следующим образом.
Зрительная труба поверяемого ГУП 1 наводится на измерительную поверхность грани многогранной призмы 2 (фиг. 1) в положение, при котором сетка нитей зрительной трубы поверяемого ГУП 1 совмещается с изображением, отраженным от измерительной поверхности грани многогранной призмы 2, образуя линию 3, соединяющая визирную ось зрительной трубы ГУП 1 с нормалью к отражающей поверхности грани многогранной призмы 2. Для подсветки сетки нитей зрительной трубы поверяемого ГУП 1 с целью получения коллимационного изображения от измерительных поверхностей граней многогранной призмы 2 используются коллимационная насадка с источником света 4, устанавливаемая на окуляр зрительной трубы поверяемого ГУП 1. В данном положении с поверяемого ГУП 1 снимаются показания. После чего, алидада поверяемого ГУП 1 поворачивается на горизонтальный плоский угол β1 (фиг. 3), таким образом, чтобы световой поток от источника света коллимационной насадки 4, пройдя через зрительную трубу поверяемого ГУП 1, падая под углом i1, отразился от отражающей поверхности зеркала 5 под тем же углом i2 (i1 = i2) относительно перпендикуляра к поверхности зеркала 5 и построил изображение сетки нитей зрительной трубы на измерительной поверхности грани многогранной призмы 2. Сетка нитей зрительной трубы поверяемого ГУП 1 точно совмещается с изображением сетки нитей, отраженным от измерительной поверхности грани многогранной призмы 2, после чего, с поверяемого ГУП 1 снимаются показания. Погрешность измерений горизонтального угла поверяемым ГУП 1 определяется как разность угла β1, измеренного поверяемым ГУП 1, и образцового угла βобр между гранями многогранной призмы 2, с учетом угла отклонения нормали зеркала 5 от линии 3. Аналогично, для определения погрешности измерений горизонтального угла поверяемым ГУП 1 вместо зеркала 5 может использоваться зеркало 6 (фиг. 3).
Передача единицы плоского угла в вертикальной плоскости по предлагаемому способу производится следующим образом.
Зрительная труба поверяемого ГУП 1 наводится на измерительную поверхность грани многогранной призмы 2 (фиг. 2) в положение, при котором сетка нитей зрительной трубы поверяемого ГУП 1 совмещается с изображением, отраженным от измерительной поверхности грани многогранной призмы 2, образуя линию 3, соединяющая визирную ось зрительной трубы ГУП 1 с нормалью к отражающей поверхности грани многогранной призмы 2. Для подсветки сетки нитей зрительной трубы поверяемого ГУП 1 с целью получения коллимационного изображения от измерительных поверхностей граней многогранной призмы 2 используются коллимационная насадка с источником света 4, устанавливаемая на окуляр зрительной трубы поверяемого ГУП 1. В данном положении с поверяемого ГУП 1 снимаются показания. После чего, зрительная труба поверяемого ГУП 1 наклоняется на угол α1 (фиг. 4), таким образом, чтобы световой поток от источника света коллимационной насадки 4, пройдя через зрительную трубу поверяемого ГУП 1, падая под углом i3, отразился от отражающей поверхности зеркала 7 под тем же углом i4 (i3 = i4) относительно перпендикуляра к поверхности зеркала 7 и построил изображение сетки нитей зрительной трубы на измерительной поверхности грани многогранной призмы 2. Сетка нитей зрительной трубы поверяемого ГУП 1 точно совмещается с изображением сетки нитей, отраженным от измерительной поверхности грани многогранной призмы 2, после чего, с поверяемого ГУП 1 снимаются показания. Погрешность измерений вертикального угла поверяемым ГУП 1 определяется как разность угла α1, измеренного поверяемым ГУП 1, и образцового угла αобр между гранями многогранной призмы 2, с учетом угла отклонения нормали зеркала 7 от линии 3. Аналогично, для определения погрешности измерений вертикального угла поверяемым ГУП 1 вместо зеркала 7 может использоваться зеркало 8. Для определения погрешности измерений положительного и отрицательного относительно линии 3 и плоскости горизонта вертикальных углов, многогранная призма 2 в подставке устанавливается вертикально.
Для воспроизведения различных значений контрольных горизонтальных и вертикальных плоских углов, установленных методиками поверки конкретных ГУП, используют парные горизонтальные 5, 6 и вертикальные 7, 8 плоские зеркала совместно, то есть контрольные горизонтальные и вертикальные плоские углы формируются между зеркалами 5, 6 и 7, 8 соответственно.
Для реализации предлагаемого способа используется установка для поверки геодезических угломерных приборов [4]. Применение многогранной призмы вместо РЭПУ позволяет уменьшить погрешность передачи единицы плоского угла поверяемым ГУП с 0,6ʺ до 0,3ʺ, что в соответствии с государственной поверочной схемой для средств измерений плоского угла [5] удовлетворяет требованиям, предъявляемым к рабочим эталонам плоского угла 1 разряда.
1. ГОСТ Р ИСО 17123-3 Оптика и оптические приборы. Методики полевых испытаний геодезических и топографических приборов. Национальный стандарт Российской Федерации. М.: Стандартинформ, 2011. – 23 с.
2. ГОСТ Р 50.2.024-2002 Теодолиты и другие геодезические угломерные приборы. Методика поверки. М.: Издательство стандартов, 2002. – 11 с.
3. Патент на изобретение RU 2768243, МКП G01В 5/24. Способ передачи единицы плоского угла геодезическим угломерным приборам/ М.А. Конюхов, Ю.А. Клейменов (Россия) - Заявка №2020119439, 11.06.2020; Опубл. 23.03.2022. Бюл. № 9.
4. Патент на полезную модель RU 186485, МКП G01В 5/24. Установка для поверки геодезических угломерных приборов/ М.А. Конюхов (Россия) – Заявка №2018129987, 17.08.2018; Опубл. 22.01.2019. Бюл. № 3.
5. Приказ Федерального агентства по техническому регулированию и метрологии от 26 ноября 2018 г. №2482 «Государственная поверочная схема для средств измерений плоского угла».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ЕДИНИЦЫ ПЛОСКОГО УГЛА ГЕОДЕЗИЧЕСКИМ УГЛОМЕРНЫМ ПРИБОРАМ | 2020 |
|
RU2768243C2 |
| Устройство для поверок геодезических приборов | 1978 |
|
SU763682A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| Устройство для поверок геодезических приборов | 1981 |
|
SU1113698A1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2320961C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
| Устройство для установки отражающего элемента в заданное положение | 1981 |
|
SU949337A1 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ЦИФРОВЫХ НИВЕЛИРОВ И ШТРИХКОДОВЫХ РЕЕК | 2009 |
|
RU2419766C1 |
| Устройство для измерения угла междуНАпРАВлЕНияМи HA ВизиРНыЕ цЕли | 1978 |
|
SU849005A1 |
| УСТРОЙСТВО БАЗИРОВАНИЯ МНОГОГРАННЫХ ПРИЗМ | 2019 |
|
RU2711610C1 |
Изобретение относится к области обеспечения единства измерений. Особенностью заявленного способа передачи единицы плоского угла высокоточным геодезическим угломерным приборам (ГУП) является то, что поверяемый ГУП измеряет контрольные горизонтальные и вертикальные плоские углы от измерительной поверхности грани правильной многогранной призмы, установленной перед ним, до изображения сетки нитей зрительной трубы, формируемого на поверхности двух равноудаленных плоских зеркал, в горизонтальной или вертикальной плоскости, расположенных между поверяемым ГУП и правильной многогранной призмой. Технический результат заключается в обеспечении погрешности передачи единицы плоского угла высокоточным ГУП в горизонтальной и вертикальной плоскостях за счет использования в качестве эталона плоского угла правильной многогранной призмы и системы плоских зеркал. 4 ил.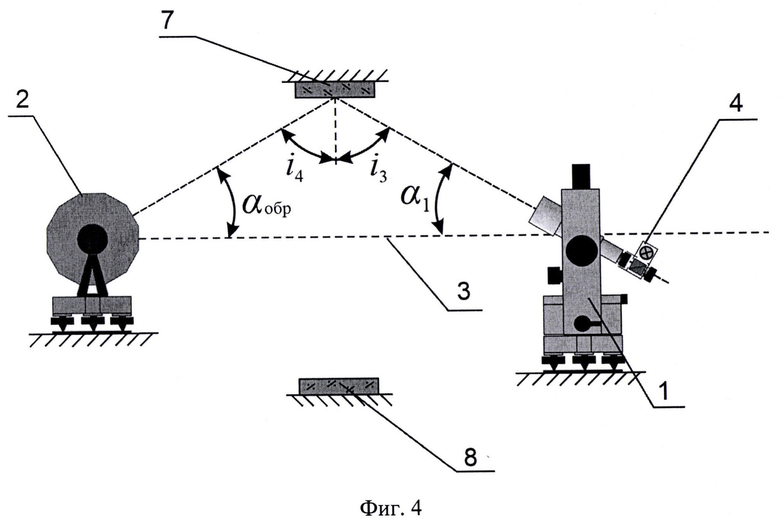
Способ передачи единицы плоского угла геодезическим угломерным приборам (ГУП), при котором погрешность измерений горизонтальных и вертикальных углов поверяемым ГУП определяют в соответствии с методикой его поверки путем последовательных многократных измерений контрольных горизонтальных и вертикальных плоских углов, отличающийся тем, что для воспроизведения контрольных горизонтальных и вертикальных плоских углов используют отражающие поверхности граней правильной многогранной призмы и систему плоских зеркал, расположенных попарно в горизонтальной и вертикальной плоскостях параллельно друг другу, причем геометрические центры плоских зеркал равноудалены от линии пересечения горизонтальной и вертикальной плоскостей, являющейся продолжением нормалей к отражающим поверхностям правильной многогранной призмы и визирной оси зрительной трубы поверяемого ГУП, которые в соответствии с законом отражения света, определяющим равенство углов падения и отражения луча света, обеспечивают отражение изображения сетки нитей ГУП для измерения соответствующих контрольных горизонтальных и вертикальных плоских углов между отражающими поверхностями граней правильной многогранной призмы.
| 0 |
|
SU178308A1 | |
| Устройство для определения направления линий | 1975 |
|
SU533818A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГОРИЗОНТАЛЬНОГО НАПРАВЛЕНИЯ С ОДНОГО ГОРИЗОНТА НА ДРУГОЙ | 2001 |
|
RU2204116C2 |
| Устройство для азимутальной ориентации | 1984 |
|
SU1210081A1 |
| Оптический способ параллельного переноса исходного направления | 1972 |
|
SU447551A1 |
| CN 105910624 A, 31.08.2016 | |||
| CN 102927993 A, 13.02.2013 | |||
| Устройство для обработки материалов | 1982 |
|
SU1057106A1 |

