Изобретение относится к области ракетно-космической техники, а более конкретно к устройствам системам посадки, и может быть использовано при создании устройств систем обеспечения посадки для ракет-носителей выведения коммерческих объектов на орбиты, обеспечивающих возврат и спасение отработавших двигательных блоков, включающих топливные баки и многоразовые жидкостные ракетные двигатели первых ступеней ракеты, что при выполнении коммерческих пусков является актуальной задачей.
Известны системы возврата двигательного ракетного блока с использованием парашютных систем, проекты возврата ракетного блока с использованием аэродинамического крыла с заходом на посадку и посадку на аэродроме (патент РФ №2442727 от 20.09.2010 г. МПК B64G 1/14, B64G 1/62).
Недостатком такой системы спасения является необходимость введения в конструкцию ракетного блока самолетных систем, дополняющих первую ступень ракетного блока до варианта крылатого ракетного блока, что хотя и позволяет приземлить ступень планированием на аэродром возврата, однако повышает массу и дополняет новыми системами управления, что не всегда целесообразно, тем более для обеспечения возврата уже разработанных ракет - носителей и широко применяемых для выведения полезных коммерческих грузов.
Известно устройство для посадки возвращаемой ступени ракеты-носителя, содержащее расположенные на поверхности земли сетчатую конструкцию из тросов из жаропрочной стали, выполненную в форме усеченного конуса и установленную на шарнирных опорах, и механический манипулятор, исполнительные органы которого расположены над сетчатой конструкцией, основания усеченного конуса, образованного сетчатой конструкцией, расположены в горизонтальной плоскости, его внутренняя полость обращена по направлению «в зенит», а диаметр меньшего основания имеет размер больший, чем величина части хвостового отсека ракеты-носителя, проходящей через него при посадке, при этом опоры сетчатой конструкции выполнены с возможностью регулирования положения ее продольной оси относительно нормали к земной поверхности, а в плоскости, проходящей через меньшее основание конуса сетчатой конструкции, установлены крепежные крюки, удерживающие ракету-носитель после ее посадки (см. патент РФ №2740525 МПК B64G 5/00 от 22.05.2020) - прототип.
Известное устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем обладает рядом преимуществ по сравнению с ранее упомянутыми, так как может быть использовано для посадки возвращаемых уже разработанных и применяемых первых ступеней ракет - носителей, не требующих значительной доработки ракет-носителей и значительных в данном случае материальных затрат.
Однако, оно не всегда позволяет компенсировать отклонение системы прицеливания ступени на точку приземления, связанное как с воздействием многих других факторов, связанных с работой тормозных двигателей, с разбросом импульса тяги жидкостного ракетного двигателя, или даже с воздействием бокового ветра, что может привести к нерасчетному случаю приземления, нарушения целостности наземного устройства и что не менее важно, приземляемой ступени ракеты-носителя. Это связано с тем, что комплектация устройства системы приземления не позволяет изменять габаритные размеры приемного «окна» так, чтоб оно обеспечивало геометрические размеры, приближенные к размерам круглого, для приема ступени ракеты - носителя, и не позволяет перемещать его вдоль плоскости приземления своей продольной осью симметрии, ориентируя на приземляющуюся ступень ракеты-носителя в любом направлении в горизонтальной системе прямоугольных координат, тем самым повышает нагрузку на формирование команд приземления на приземляемую ступень ракеты, на систему регулирования работы многоразового жидкостного ракетного двигателя, что в конечном итоге приводит к нерациональному использованию ресурса многоразового жидкостного ракетного двигателя на нерасчетных режимах работы, по сравнению с теми, как этого требует его работа на режиме выведения, и связанной с этим выработке ресурса. Кроме того, комплектация системы приземления в виде сетки из тросов не обладает достаточной ремонтопригодностью при ее повреждении струей продуктов сгорания из камер многоразового жидкостного ракетного двигателя на режиме торможения и спуска, так как требует полного демонтажа всей системы и замены ее на новую конструкцию. Любое связанное в единое жесткое конструктивное исполнение элементов конуса неизбежно обладает такой жесткостью, что при соприкосновении может привести к повреждению приземляемой ступени. Взаимодействие крепежных крюков устройства с приземляемой ракетой носителем требует решения ряда проблем, связанным с их воздействием на приземляемую ступень, что требует дополнительной экспериментальной отработки и удлиняет период начала использования.
Задачей предлагаемого изобретения является формирование приемного симметричного приближенного к круглому «окна» для приема отработавшей ступени с многоразовым жидкостным ракетным двигателем и обеспечение перемещения приемного «окна» в соответствии с перемещением приемной ступени ракеты носителя в горизонтальной плоскости, податливого касания улавливающей системы с корпусом ступени ракеты-носителя за счет применения нового принципиального подхода для процесса улавливания ступени ракеты-носителя с использованием сцепления аэродинамических стабилизаторов в верхней части ступени ракеты носителя за систему улавливания и фиксации ее в таком положении до перемещения ее с помощью системы эвакуации.
Задачей предлагаемого изобретения является также расширение номенклатуры отработавших ступеней по их высоте и упрощения ликвидации отработавшей ступени.
Задачей предлагаемого изобретения является также уменьшение ударных нагрузок на отработавшую ступень.
Задачей предлагаемого изобретения является также уменьшение времени подготовки устройства при минимальном количестве тросов для приема отработавшей ступени ракеты-носителя перемещением средней части троса в радиальном направлении за счет силы натяжения.
Задачей предлагаемого изобретения является также упрощение приема отработавшей ступени с многоразовым жидкостным ракетным двигателем устройством системы обеспечения посадки за счет использования аэродинамических стабилизаторов (крюков) в верхней части ступени ракеты носителя выше центра масс в качестве фиксирующих улавливаемых крюков.
Указанная выше задача изобретения решается тем, что в известном устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, содержащем закрепленную симметрично относительно продольной оси симметрии приемного стола и на вертикальном от него расстоянии с помощью опор тросовую систему, и систему эвакуации отработавшей ступени, одни концы тросов закреплены концентрично равномерно по окружности за кольцевой трос, примонтированный с помощью узлов крепления по периферии к установленным опорам, в параллельной столу приземления плоскости и на вертикальном от стола расстоянии, а вторые концы тросов закреплены концентрично равномерно по окружности за узлы крепления, размещенные на платформе, в плоскости стола приземления с возможностью с помощью привода смещением по часовой стрелке или против часовой стрелки относительно продольной оси симметрии стола, с образованием тросами однополостного гиперболоида с приемным окном по продольной оси симметрии стола наземного устройства.
Указанная выше задача изобретения решается также тем, что в устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, платформа выполнена с возможностью перемещения с помощью координатного механизма относительно двух поперечных осей перпендикулярно продольной оси симметрии стола приземления, который в свою очередь снабжен приводами и фиксаторами координатного перемещения.
Указанная выше задача изобретения решается также тем, что в устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, узлы крепления, размещенные на платформе, выполнены с возможностью телескопического перемещения по высоте, и снабжены барабанами с приводами для изменения длины тросов.
Указанная выше задача изобретения решается также тем, что в устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, узлы крепления снабжены амортизаторами, с одной стороны связанными с продольными тросами, а с другой - с кольцевым тросом.
Указанная выше задача изобретения решается также тем, что в устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, в нем минимальное количество тросов снабжено дополнительными соединенными в середине с помощью спусковых механизмов и натяжителей тросами по направлению на внешнюю сторону устройства.
Указанная выше задача изобретения решается также тем, что в устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, в ступени ракеты с многоразовым жидкостным ракетным двигателем, содержащей многоразовый жидкостный ракетный двигатель с корпусом, топливными баками компонентов топлива и аэродинамическими стабилизаторами, места крепления аэродинамических стабилизаторов к корпусу выполнены в поперечной плоскости ступени выше центра масс ступени по направлению к верхней точке ступени, и с возможностью выдвижения и снабжены фиксаторами перемещения относительно тросов устройства системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем при посадке.
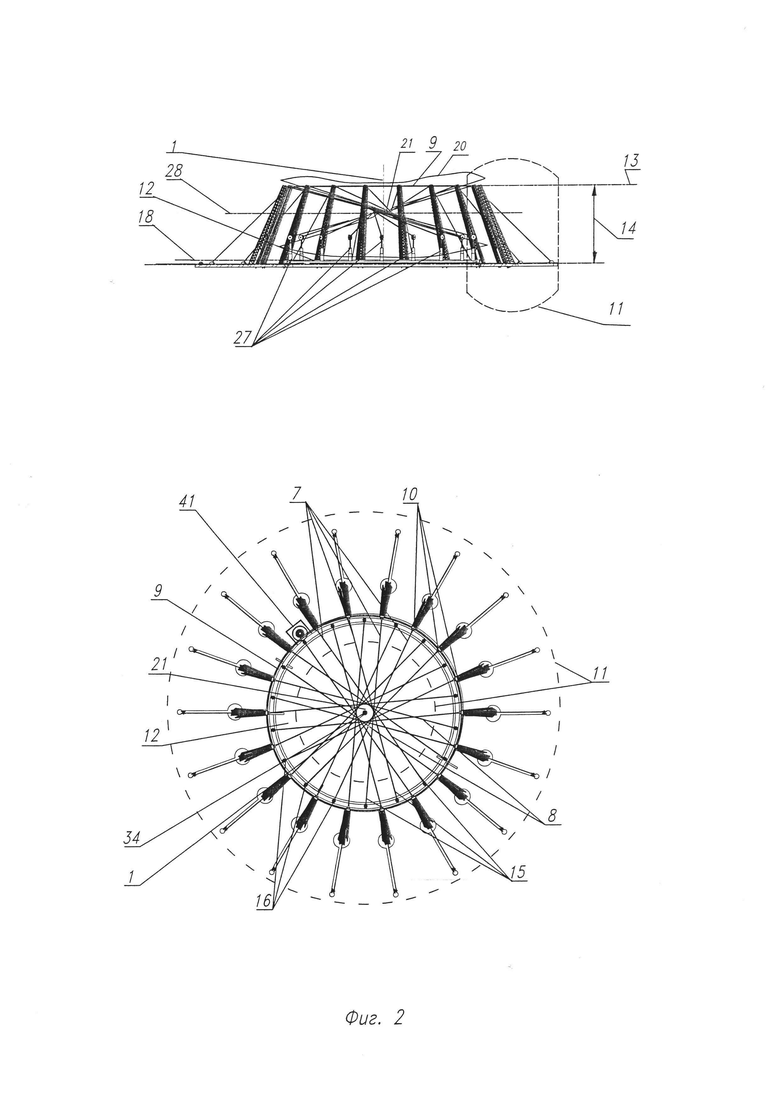
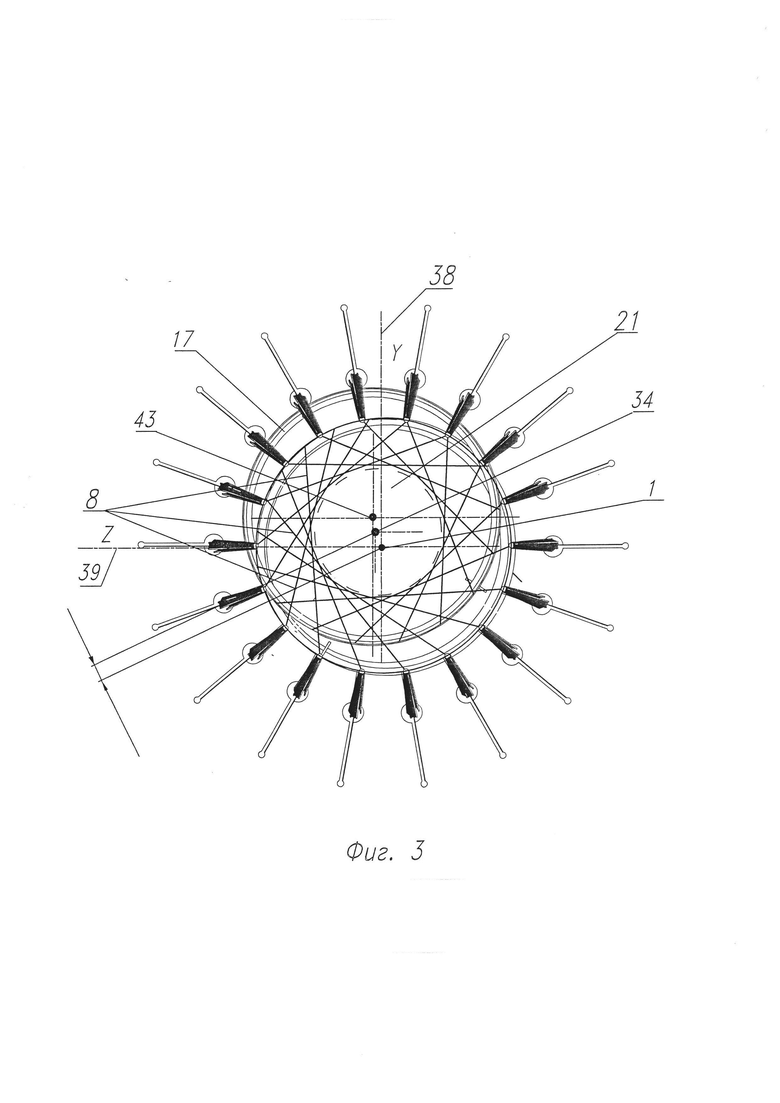
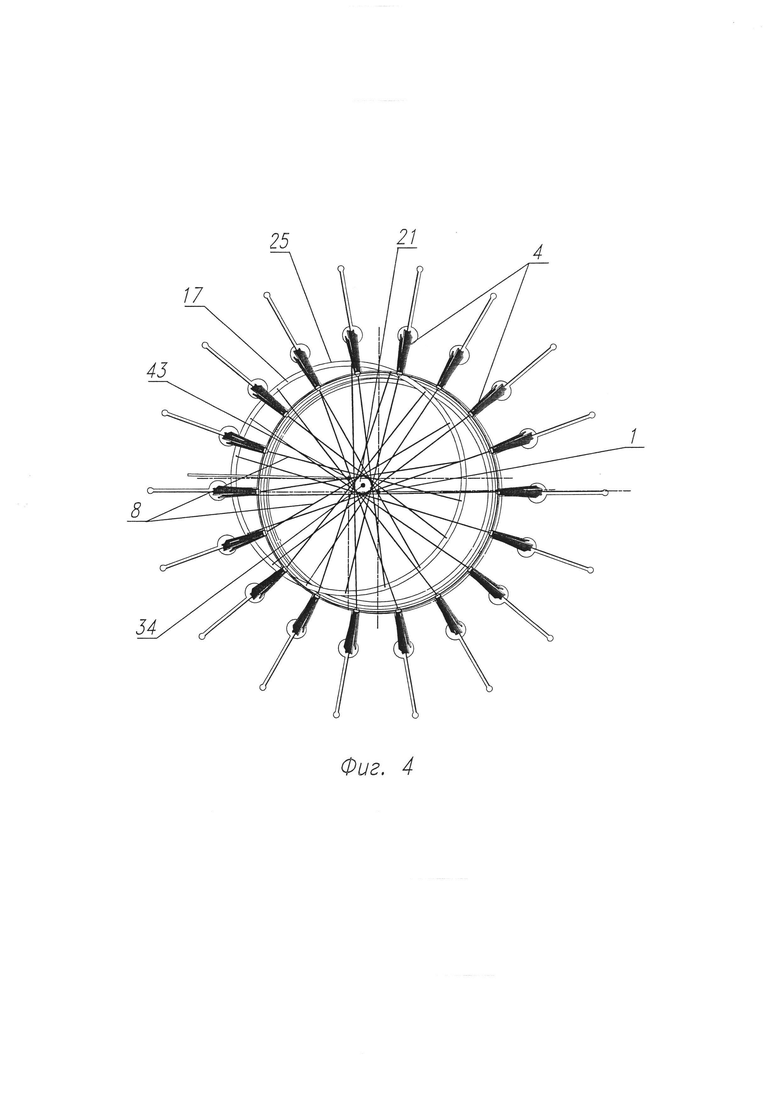
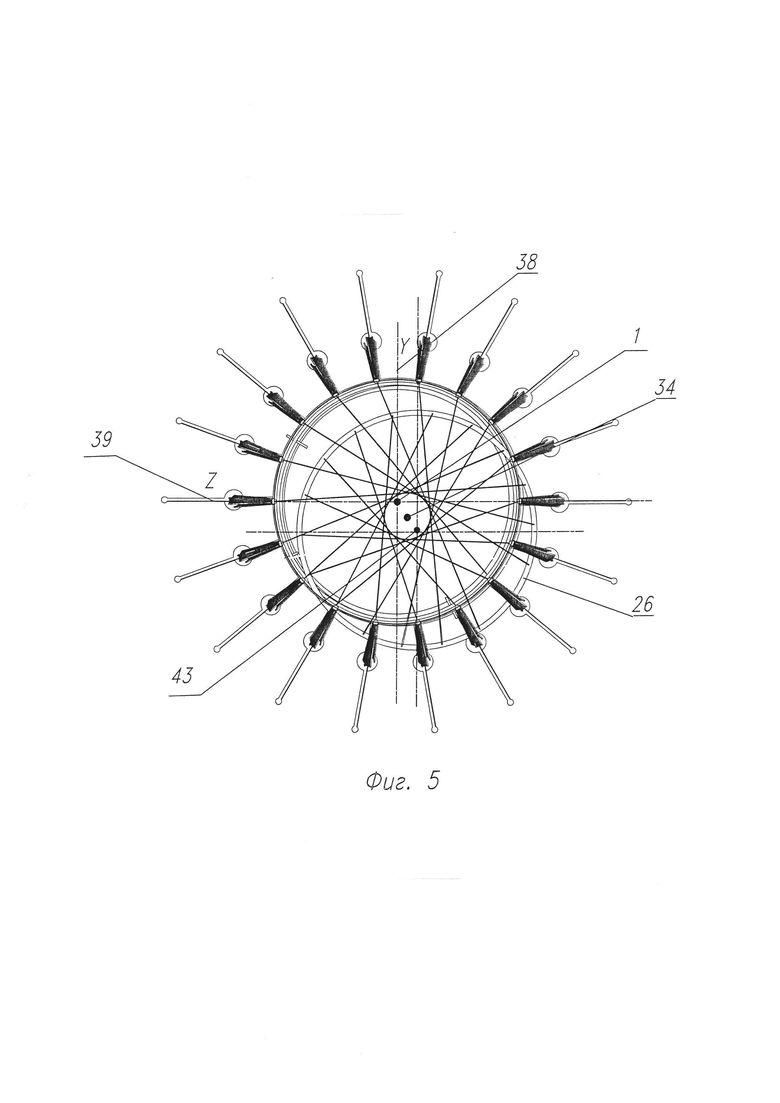
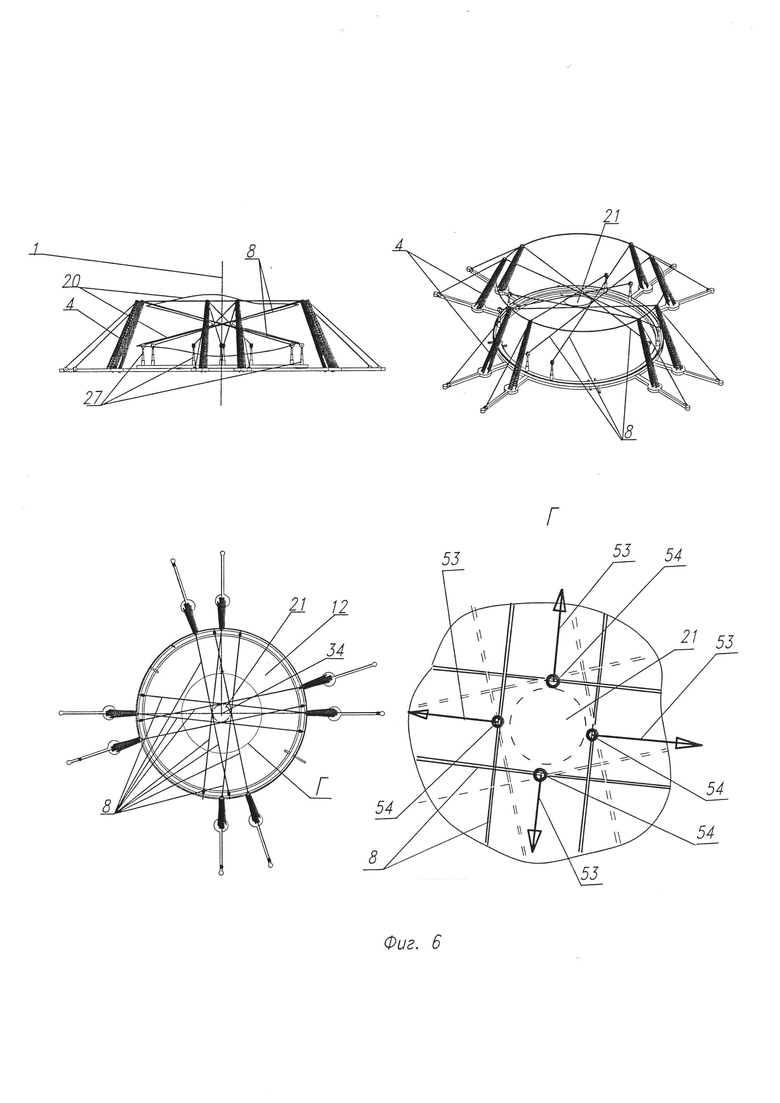
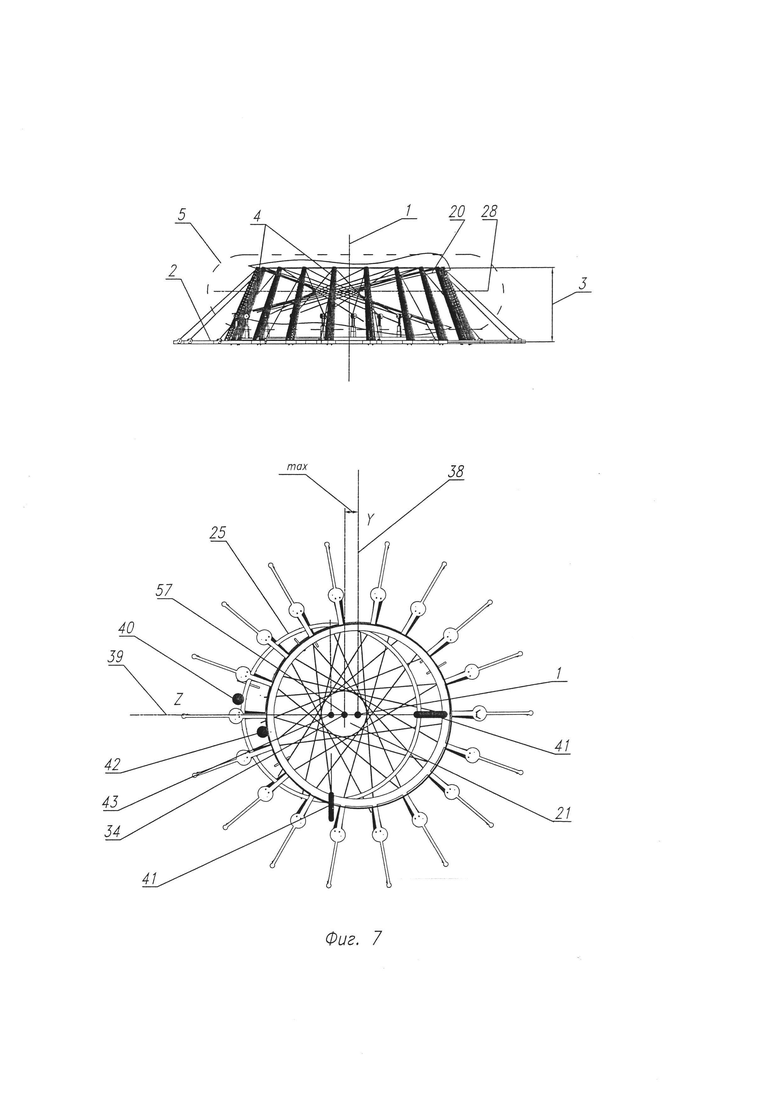
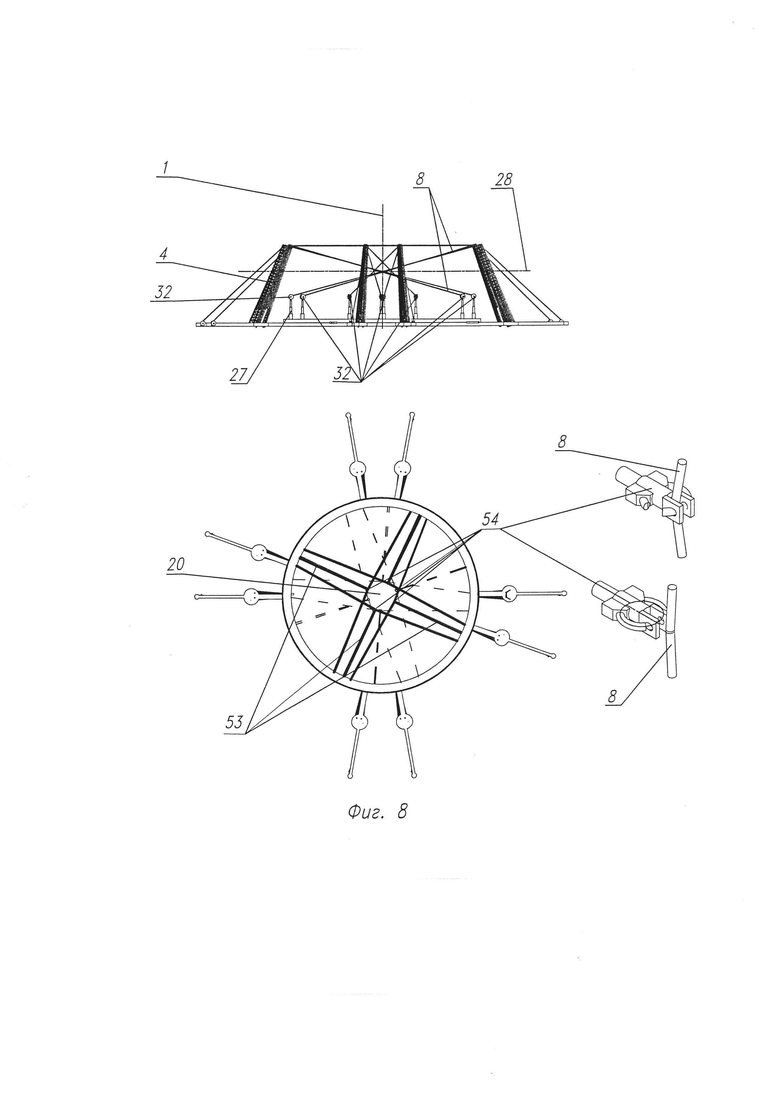
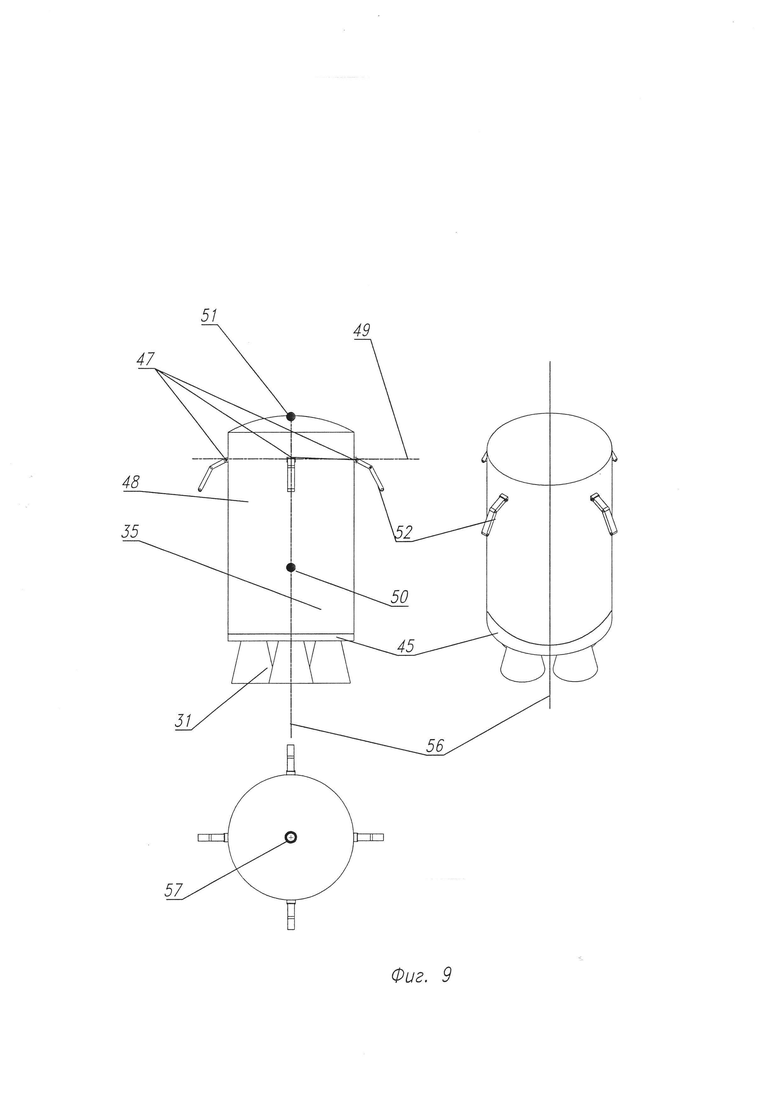
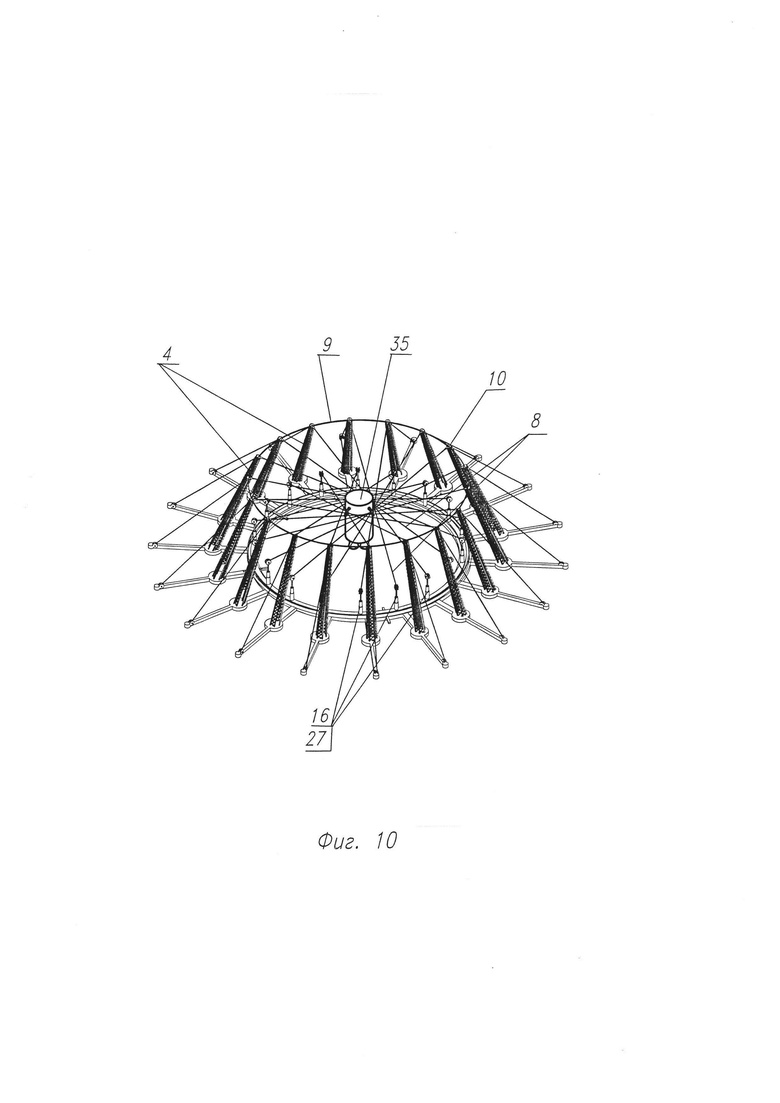
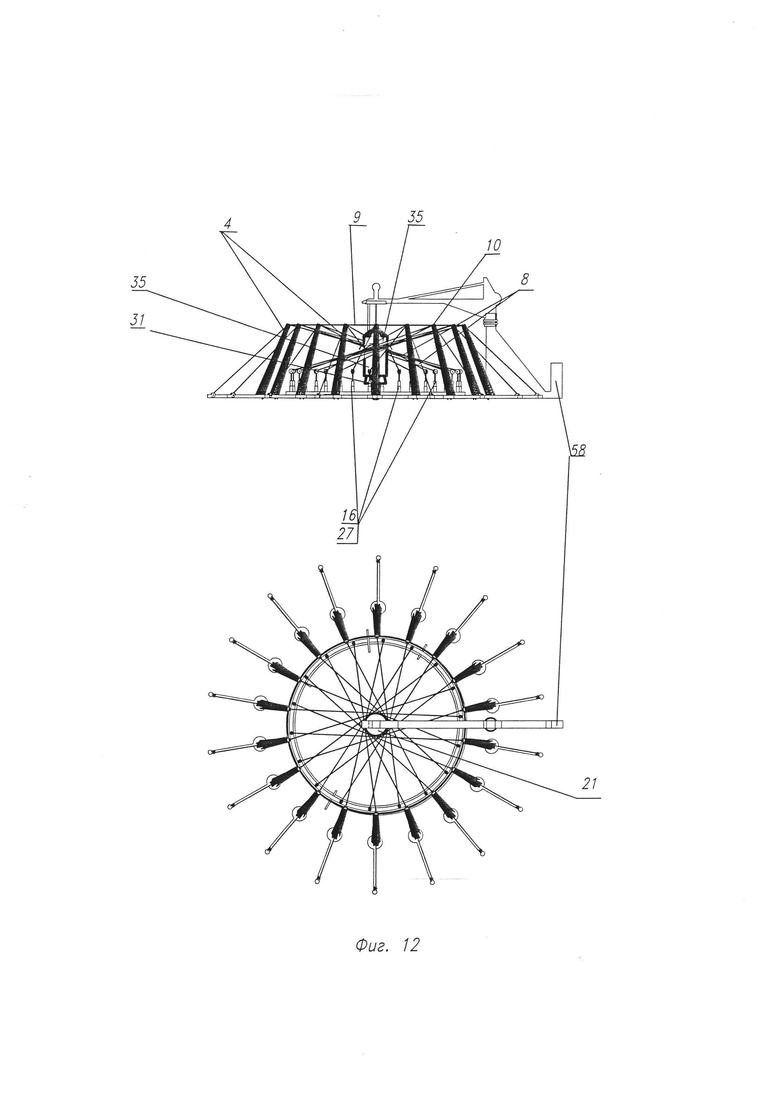
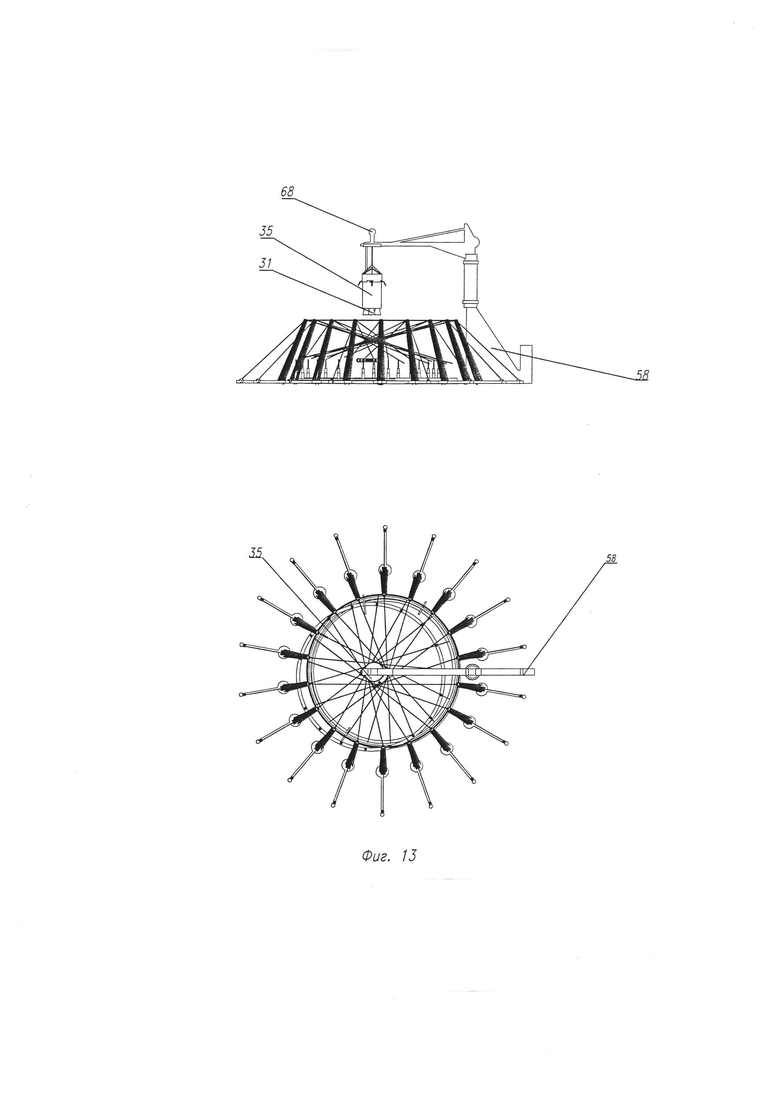
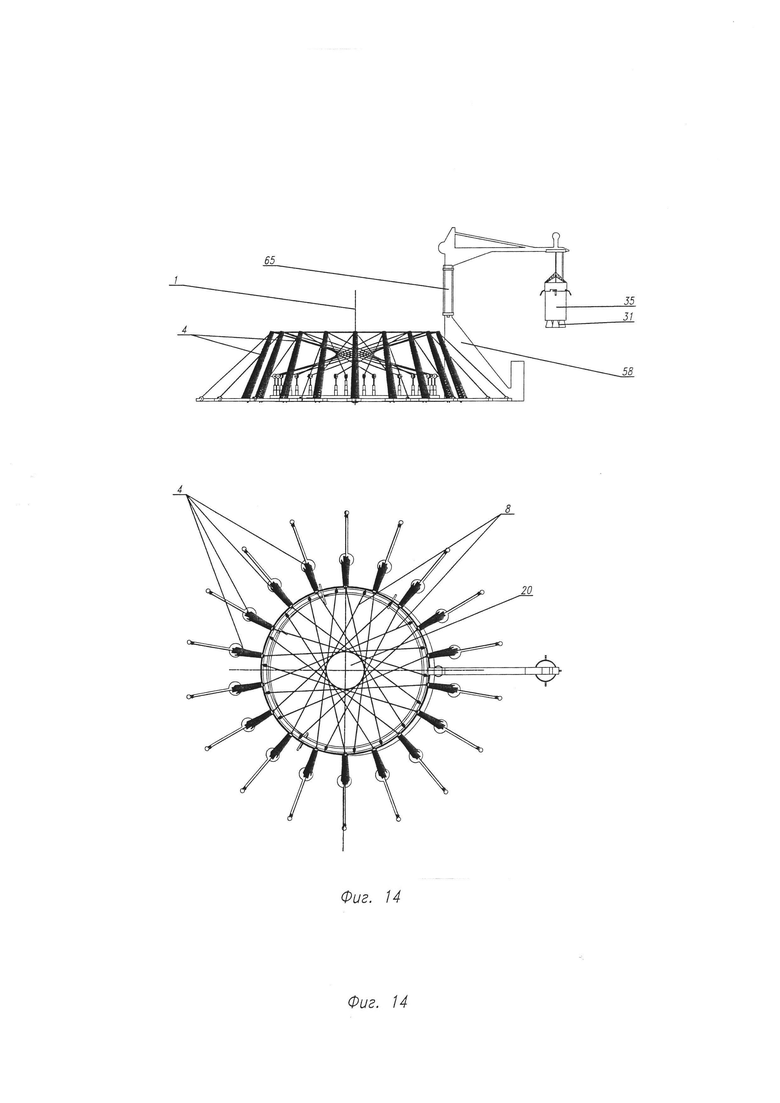
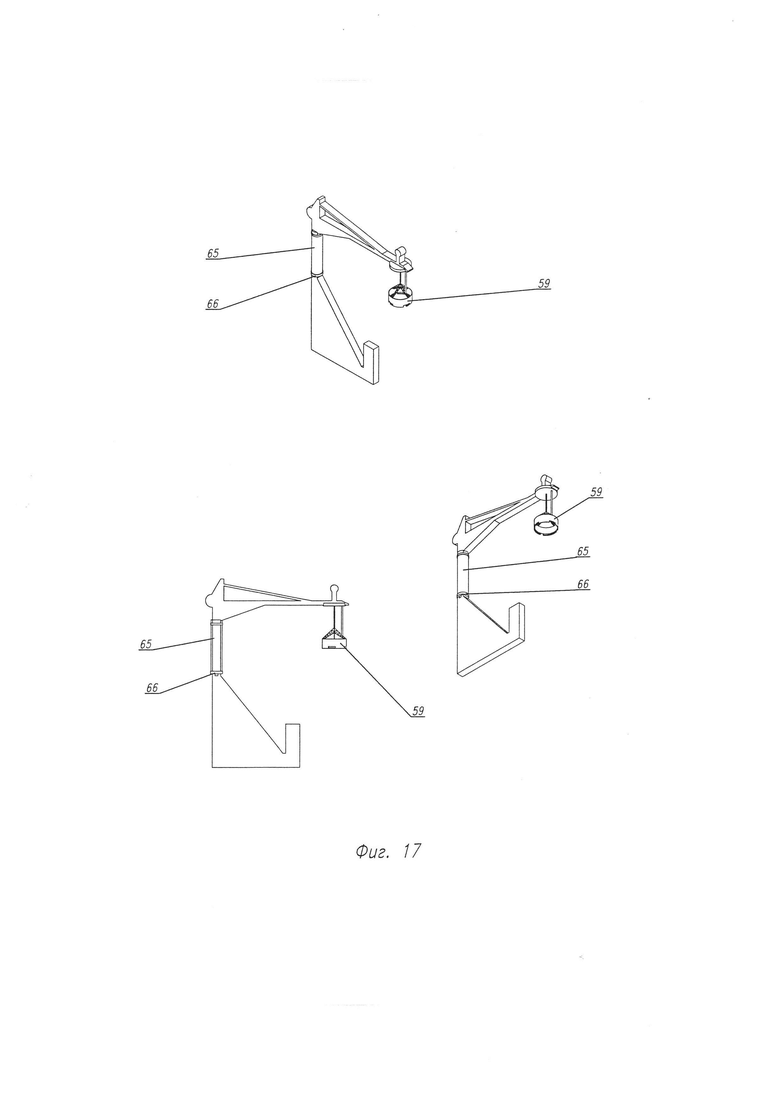
Предлагаемое устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем приведен на чертеже (фиг. 1-17), (фиг. 1 - аксонометрическое изображение устройства со всеми входящими в него системами с максимальным количеством опор 4 по периферии (в данном случае 18 штук) и максимальным количеством тросов 8 (в данном случае 18 штук) тросовой системы; фиг. 2 - общий вид сбоку и сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, где изображено приближенное к круглому приемное «окно», близкое к круглому минимального диаметра, фиг. 3 - общий вид сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем; где изображено приближенное к круглому приемное «окно», близкое к круглому максимального диаметра со смещением от центра, фиг. 4 - общий вид сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем; где изображено приближенное к круглому приемное «окно», близкое к круглому минимального диаметра со смещением от центра; фиг. 5 - общий вид сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем; где изображено приближенное к круглому приемное «окно», близкое к круглому среднего между минимальным и максимальным диаметрами, фиг. 6 - общий вид сверху и сбоку на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, аксонометрическое изображение, где изображено приближенное к круглому приемное «окно», близкое к круглому минимального диаметра, причем с минимальным количеством опор 4 по периферии (в данном случае восемь штук) и минимальным количеством тросов 8 (в данном случае восемь штук) тросовой системы), фиг. 7 - общий вид сверху и сбоку на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем; где изображено приближенное к круглому приемное «окно», близкое к круглому среднего между минимальным и максимальным диаметрами, с максимальным смещением приближенного к круглому приемного «окна» в сторону от центра приемного стола (вдоль координаты Y и вдоль координаты Z в плоскости приемного стола), фиг. 8 - общий вид сверху и сбоку на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, где изображено приближенное к круглому приемное «окно», близкое к круглому минимального диаметра, причем с минимальным количеством опор 4 по периферии (в данном случае восемь штук) и минимальным количеством тросов 8 (в данном случае восемь штук) тросовой системы) и системой предварительного натяжения соседних тросов с спусковым механизмом для организации ускоренного приема приземляемой ступени ракеты носителя, спусковой механизм в закрытом и открытом состоянии, фиг.9-изображение ступени ракеты носителя с плоскостью, расположенной выше центра масс (ЦМ), с аэродинамическими стабилизаторами в виде крюков, примонтированными к корпусу ракеты - носителя для упрощения приземления и подхвата ступени тросовой системой, фиг. 10 аксонометрическое изображение устройства со всеми входящими в него системами с максимальным количеством опор 4 по периферии (в данном случае восемнадцать штук) и максимальным количеством тросов 8 (в данном случае восемнадцать штук) тросовой системы с приземленной ступенью ракеты носителя и зафиксированными на тросах аэродинамическими стабилизаторами (крюками), фиг. 11 - общий вид сбоку на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем с размещенной в нем ступенью ракеты - носителя после приземления, фиг. 12 - общий вид сбоку и сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем с размещенной в нем ступенью ракеты-носителя после приземления и манипулятором 58 системы эвакуации 6 ступени ракеты-носителя 35, фиг. 13 - общий вид сбоку и сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем с извлеченной в вертикальном направлении в нем ступенью ракеты-носителя после приземления с помощью манипулятора 58 системы эвакуации 6 ступени ракеты-носителя 35, фиг. 14 - общий вид сбоку и сверху на устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем с извлеченной в нем ступенью ракеты-носителя из зоны приземления с помощью поворота манипулятора 58 системы эвакуации 6 ступени ракеты-носителя 35, фиг. 15 - схематическое изображение манипулятора 58 с входящими в него составными функциональными частями в аксонометрической проекции в исходном положении, фиг. 16 - схематическое изображение манипулятора 58 с входящими в него составными функциональными частями в аксонометрической проекции в положении подъема ступени ракеты-носителя, фиг. 17 - схематическое изображение манипулятора 58 с входящими в него составными функциональными частями в аксонометрической проекции в положении извлечения ступени ракеты-носителя из зоны устройства после поворота,), где показаны следующие агрегаты:
1. Продольная ось симметрии;
2. Приемный стол;
3. Вертикальное расстояние;
4. Опора;
5 Тросовая система;
6. Система эвакуации отработавшей ступени;
7. Первый конец троса;
8. Трос;
9. Кольцевой трос;
10. Узел крепления;
11. Периферия наземного комплекса;
12. Стол приземления;
13. Плоскость стола приземления;
14. Вертикальное расстояние;
15. Второй конец троса;
16. Узел крепления;
17. Платформа;
18. Плоскость;
19. Привод;
20. Однополостный гиперболоид;
21. Приемное «окно»;
22. Направление троса;
23. Провисание троса;
24. Направление силы тяжести троса;
25. Периферия платформы;
26. Кольцо;
27. Телескопический узел крепления;
28. Теоретическая плоскость приемного «окна»;
29. Общая высота топливных баков;
30. Топливный бак;
31. Многоразовый жидкостный ракетный двигатель;
32. Барабан лебедки;
33. Привод барабана лебедки;
34. Точка прицеливания приемного «окна»;
35. Ступень ракеты носителя;
36. Крюк;
37. Координатный механизм;
38. Поперечная ось координат (Y);
39. Поперечная ось координат (Z);
40. Привод;
41. Фиксатор координатного перемещения;
42. Фрикционный тормозной механизм;
43. Продольная ось симметрии платформы;
44. Амортизатор;
45. Корпус многоразового жидкостного ракетного двигателя;
46. Аэродинамический стабилизатор (крюк);
47. Место крепления аэродинамического стабилизатора к корпусу ракеты носителя;
48. Корпус топливного бака;
49. Поперечная плоскость;
50. Центр масс ступени ракеты носителя;
51. Верхняя точка ступени ракеты носителя;
52. Фиксатор перемещения;
53. Дополнительный трос;
54. Спусковой механизм;
55. Продольная ось симметрии платформы;
56. Продольная ось симметрии ракеты носителя;
57. Точка прицеливания ступени ракеты носителя;
58. Манипулятор системы эвакуации отработанной ступени ракеты носителя;
59. Охватное устройство;
60. Крюк;
61. Выборка;
62. Кронштейн;
63. Штанга;
64. Поворотный механизм;
65. Телескопический подъемник;
66. Поворотный механизм;
67. Консольная балка;
68. Барабан лебедки.
Устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем содержит закрепленную симметрично относительно продольной оси симметрии 1 приемного стола 2 и на вертикальном от него расстоянии 3 с помощью опор 4 тросовую систему 5, и систему эвакуации отработавшей ступени 6. Первые концы 7 тросов 8 закреплены концентрично равномерно по окружности за кольцевой трос 9, примонтированный с помощью узлов крепления 10 по периферии 11 к опорам 4, в параллельной столу приземления 12 плоскости 13 и на вертикальном от стола расстоянии 14, а вторые концы 15 тросов 8 закреплены концентрично равномерно по окружности за узлы крепления 16, размещенные на платформе 17, в плоскости 18 стола приземления 12 с возможностью смещения с помощью привода 19 по часовой стрелке или против часовой стрелки относительно продольной оси симметрии 1 приемного стола 2, с образованием тросами 8 однополостного гиперболоида 20 с приемным «окном» 21 вдоль продольной оси симметрии 1 стола приземления 12 наземного комплекса. Упрощение формирования приемного «окна» 21 обеспечивается за счет отдельных натянутых тросов 8 в направлениях 22, приближенных к прямолинейным, отличающихся от прямолинейных только влиянием собственного веса погонного метра троса 8, приводящего к некоторому провисанию 23 вдоль продольной оси симметрии 1 приемного стола 2 в направлении силы тяжести троса 24. Набор отдельных тросов 8 обеспечивает ремонтопригодность устройства системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем в случае выхода одного или нескольких смежных тросов 8, а в некоторых случаях, даже когда выходят из строя несколько не смежных тросов 8, обеспечивает работу устройства из-за расположения тросов 8 с образованием однополостного гиперболоида 20. Вторые концы 15 тросов 8 закреплены на периферии 25 платформы 17, выполненной в виде кольца 26, на телескопических узлах крепления 27, с возможностью выдвижения в вертикальном направлении. Это качество дает возможность регулировать размещение по высоте теоретическую плоскость 28 приемного «окна» 23, обеспечивающего прием возвращаемых ступеней ракет-носителей с различной вплоть до максимальной общей высотой 29 топливных баков 30 и многоразового жидкостного ракетного двигателя 31. Размещение в верхней зоне телескопических узлов крепления 27 барабанов 32 с приводами 33 дает возможность компенсировать длину тросов 8 и обеспечивать натяжение тросов 8 при регулировании размеров приемного «окна» 23 и перемещения приемного «окна» 23 в горизонтальной плоскости для корректировки точки 34 прицеливания ступени ракеты-носителя 35, что обеспечивает упругость тросов 8 при контакте с крюками 36 на ступени ракеты-носителя 35.
В устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем 31 узлы крепления 16, размещенные на платформе 17, выполнены с возможностью телескопического перемещения по высоте, и снабжены барабанами 32 с приводами 33 для изменения длины тросов 8. Обеспечение посадки ступени ракеты-носителя 35 с многоразовым жидкостным ракетным двигателем 31 осуществляется вращением платформы 17 и перемещением с помощью координатного механизма 37 относительно двух поперечных осей координат 38 и 39 перпендикулярно продольной оси симметрии 1 стола приземления 12, который в свою очередь снабжен приводами 40, например, электрическими или пневматическими, и фиксаторами координатного перемещения 41, например фрикционными электрическими тормозными механизмами 42. Перемещение платформы 17 вдоль осей Y и Z в прямоугольной системе координат в горизонтальной плоскости позволяет перемещать ее вдоль плоскости приземления своей продольной осью симметрии 43, ориентируя на приземляющуюся ступень ракеты-носителя 35 в любом направлении в горизонтальной системе прямоугольных координат, тем самым снижает нагрузку на формирование команд приземления на приземляемую ступень ракеты-носителя 35, что в конечном итоге приводит к рациональному использованию ресурса многоразового жидкостного ракетного двигателя 31 и сокращению времени работы создания тяги торможения на режимах работы при посадке, в отличие от тех режимов, как этого требует его работа на режиме выведения, и связанной с этим сокращением выработки ресурса.
В устройстве системы обеспечения посадки отработавшей ступени ракеты-носителя 35 с многоразовым жидкостным ракетным двигателем 31 узлы крепления снабжены амортизаторами 44, с одной стороны связанными с тросами 8, а с другой- с кольцевым тросом 9.
Ступень ракеты-носителя 35 с многоразовым жидкостным ракетным двигателем 31, предназначенная для приземления в устройстве системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем содержит многоразовый жидкостный ракетный двигатель 31 с корпусом 45, топливными баками 30 компонентов топлива и аэродинамическими стабилизаторами (крюками) 46. Места крепления 47 аэродинамических стабилизаторов (крюков) 46 к корпусу 48 топливног бака 30 выполнены в поперечной плоскости 49 ступени ракеты-носителя 35 выше центра масс 50 ступени ракеты-носителя 35 по направлению к верхней точке 51 ступени ракеты-носителя 35, и с возможностью выдвижения и снабжены фиксаторами перемещения 52 относительно тросов 8 устройства при посадке.
Количество тросов 8 может быть выбрано от минимального - восемь штук до максимального (в данном случае, до восемнадцати штук), или более, в зависимости от массы ступени ракеты-носителя 35 и толщины тросов 8. Для варианта с минимальным количеством тросов 8 для уменьшения времени подготовки устройства к посадке ступени ракеты-носителя 35 в режиме реального времени каждый из тросов 8 может быть оборудован системой дополнительных тросов 53 для предварительного увеличения размеров приемного «окна» 23 и спусковым механизмом 54 для возврата тросов 8 в прямолинейное положение с уменьшением приемного «окна» 23 в дополнение к системе вращения платформы 17 вокруг своей продольной оси симметрии 54, что уменьшает время приема ступени ракеты-носителя 35 и сокращает необходимое время работы многоразового жидкостного ракетного двигателя 31 при посадке.
Устройство системы обеспечения посадки отработавшей ступени ракеты-носителя 35 с многоразовым жидкостным ракетным двигателем 31 работает следующим образом. В начальном положении (фиг. 3), приемное «окно» 23 за счет вращения платформы 17 принимает заданные максимальные размеры, близкие к по форме к круглому. По мере приближения к устройству ступени ракеты-носителя 35 в вертикальном или близком к вертикальному положении с включенным многоразовым жидкостным ракетным двигателем 31 устройство получает значение горизонтальных осей координат Y и Z продольной оси симметрии 56 ступени ракеты-носителя 35 от системы управления (на фиг. 1-17 не показана) и корректирует точку прицеливания 34 в центре приемного «окна» 23 перемещением платформы 17 в горизонтальной плоскости вдоль двух осей координат Y и Z и по мере приближения ступени ракеты-носителя 35 к устройству происходит перемещение платформы 17 до совмещения точки прицеливания приемного «окна» 34 и точки прицеливания 57 ступени ракеты-носителя. При минимальном расстоянии ступени ракеты-носителя 35 до устройства системы обеспечения посадки отработавшей ступени ракеты-носителя 35 с многоразовым жидкостным ракетным двигателем 31, достаточным для корректировки размеров приемного «окна» 23 от максимального до размеров вхождения ступени ракеты-носителя 35 в приемное «окно» 23, вращением платформы 17 в заданном направлении, если количество тросов 8 максимальное (например восемнадцать), или срабатыванием спускового механизма 53 и одновременным вращением платформы 17, если количество тросов 8 минимальное (восемь), происходит выключение многоразового жидкостного ракетного двигателя 31, осуществляется дальнейшее свободное перемещение ступени ракеты-носителя 35 в приемное «окно» 23 под действием инерции и силы тяжести в направлении 24, и фиксация ее с помощью аэродинамических стабилизаторов (крюков) 46, количество которых выбирается для гарантированного сцепления каждого крюка 46 с тросами 8 с помощью фиксаторов 52. Из-за возможности приземления ступени ракеты-носителя 35 с выключенным многоразовым жидкостным ракетным двигателем 31 снижается воздействие высокотемпературных продуктов сгорания на ступень ракеты-носителя 35 от взаимодействия с приемным столом 2, а также снижается воздействие высокотемпературных продуктов сгорания на устройство системы обеспечения посадки отработавшей ступени ракеты-носителя 35 с многоразовым жидкостным ракетным двигателем 31. За счет размещения автономных тросов 8 обеспечивается ремонтопригодность наземного комплекса. Эвакуация ступени ракеты-носителя 35 осуществляется известными способами, например, манипулятором 58 системы эвакуации отработанной ступени 6 ракеты носителя 35. На фиг. 12-14 показана последовательность извлечения ступени ракеты-носителя 35 из устройства. Сцепление манипулятора 58 с ступенью ракеты -носителя 35 осуществляется с помощью цилиндрического охватного устройства 59, в котором выполнены крюки 60, образованные выборками 61, снабженного кронштейнами 62, тросом 62 и штангой 63 для поворота цилиндрического охватного устройства 59 с помощью поворотного механизма 64. Манипулятор 58 осуществляет подъем ступени ракеты-носителя 35 с помощью телескопического подъемника 65, который совмещает функции поворотного механизма 66 консольной балки 67 с закрепленным на ней поворотным механизмом 64 и барабаном лебедки 68 для подъема троса 62.
Применение предлагаемого изобретения позволит осуществлять формирование приемного симметричного приближенного к круглому «окна» для приема отработавшей ступени с многоразовым жидкостным ракетным двигателем и обеспечение перемещения приемного «окна» в соответствии с перемещением приемной ступени ракеты-носителя в горизонтальной плоскости, податливого касания устройства системы обеспечения посадки отработавшей ступени ракеты-носителя с многоразовым жидкостным ракетным двигателем с корпусом приземляемой ступени ракеты-носителя за счет применения нового принципиального подхода для процесса улавливания приземляемой ступени ракеты-носителя с использованием сцепления аэродинамических стабилизаторов в верхней части ступени ракеты носителя за систему улавливания и фиксации ее в таком положении до перемещения ее с помощью системы эвакуации. Кроме того, применение предлагаемого изобретения является также расширение номенклатуры отработавших ступеней по их высоте и упрощения эвакуации отработавшей ступени ракеты-носителя, уменьшение ударных нагрузок на отработавшую ступень ракеты-носителя и упрощение приема отработавшей ступени ракеты-носителя с многоразовым жидкостным ракетным двигателем с устройством системы обеспечения посадки за счет использования выдвижных аэродинамических стабилизаторов (крюков) в верхней части ступени ракеты-носителя выше центра масс.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПОЛЬЗОВАНИЯ МНОГОРАЗОВОЙ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 2017 |
|
RU2678616C1 |
| СПОСОБ ВОЗВРАТА РАКЕТНОЙ СТУПЕНИ НА ЗЕМЛЮ И РАКЕТНАЯ СТУПЕНЬ ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2021 |
|
RU2771550C1 |
| Устройство для посадки возвращаемой ступени ракеты-носителя | 2020 |
|
RU2740525C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2021 |
|
RU2771474C1 |
| РАКЕТА-НОСИТЕЛЬ, ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЕ ЗАПУСКА ПРИ ВОЗВРАЩЕНИИ И СИСТЕМА ВЕРТОЛЕТНОГО ПОДХВАТА ВОЗВРАЩАЕМОЙ СТУПЕНИ | 2015 |
|
RU2609539C1 |
| МНОГОРАЗОВАЯ ПЕРВАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ | 2022 |
|
RU2790569C1 |
| Способ запуска на орбиту полезной нагрузки и многоразовая эжекторная ступень РН для его осуществления | 2019 |
|
RU2734965C1 |
| СПОСОБ ВОЗВРАЩЕНИЯ НА КОСМОДРОМ МНОГОРАЗОВОЙ ПЕРВОЙ СТУПЕНИ РАКЕТЫ | 2006 |
|
RU2309089C1 |
| ВОЗВРАЩАЕМАЯ ВЕРХНЯЯ СТУПЕНЬ ДВУХСТУПЕНЧАТОЙ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЁ ПОСАДКИ | 2023 |
|
RU2818924C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ТАНДЕМНОЙ СХЕМЫ С МНОГОРАЗОВОЙ ПЕРВОЙ СТУПЕНЬЮ | 2006 |
|
RU2318704C2 |




Группа изобретений относится к наземным средствам сетчатого типа для обеспечения посадки отработавших ступеней ракет-носителей (РН), содержащих многоразовые жидкостные ракетные двигатели, а также к конструкции таких ступеней. В предлагаемом устройстве одни концы тросов закреплены концентрично по окружности за кольцевой трос, присоединены по периферии к опорам в параллельной столу приземления, отстоящей от него по высоте плоскости. Вторые концы тросов аналогично закреплены за узлы крепления, размещенные на платформе в плоскости данного стола с возможностью смещения приводом вокруг продольной оси стола и образования тем самым однополостного тросового гиперболоида с приемным окном по продольной оси симметрии стола. Платформа может горизонтально перемещаться с помощью координатного механизма. При этом аэродинамические стабилизаторы ступени установлены выше ее центра масс, выполнены выдвижными и с фиксаторами перемещения относительно тросов. Техническим результатом является формирование близкого к круглому «окна» для приема ступени РН и обеспечение его перемещения с отслеживанием перемещения ступени в горизонтальной плоскости, а также обеспечение податливого касания ступенью улавливающего устройства. 2 н. и 4 з.п. ф-лы, 17 ил.
1. Устройство системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, содержащее закрепленную симметрично относительно продольной оси симметрии приемного стола и на вертикальном от него расстоянии с помощью опор тросовую систему и систему эвакуации отработавшей ступени, отличающееся тем, что в нем одни концы тросов закреплены концентрично равномерно по окружности за кольцевой трос, присоединенный с помощью узлов крепления по периферии к установленным опорам, в параллельной столу приземления плоскости и на вертикальном от стола расстоянии, а вторые концы тросов закреплены концентрично равномерно по окружности за узлы крепления, размещенные на платформе в плоскости стола приземления с возможностью смещения с помощью привода по часовой стрелке или против часовой стрелки относительно продольной оси симметрии приемного стола, с образованием тросами однополостного гиперболоида с приемным окном вдоль продольной оси симметрии стола приземления наземного устройства.
2. Устройство по п. 1, отличающееся тем, что в нем платформа выполнена с возможностью перемещения с помощью координатного механизма относительно двух поперечных осей перпендикулярно продольной оси симметрии стола приземления, который в свою очередь снабжен приводами и фиксаторами координатного перемещения.
3. Устройство по п. 1, отличающееся тем, что в нем узлы крепления, размещенные на платформе, выполнены с возможностью телескопического перемещения по высоте и снабжены барабанами с приводами для изменения длины тросов.
4. Устройство по п. 1, отличающееся тем, что в нем узлы крепления снабжены амортизаторами, с одной стороны связанными с продольными тросами, а с другой - с кольцевым тросом.
5. Устройство по п. 1, отличающееся тем, что в нем минимальное количество тросов снабжено дополнительными соединенными в середине с помощью спусковых механизмов и натяжителей тросами по направлению к внешней стороне устройства.
6. Ступень ракеты с многоразовым жидкостным ракетным двигателем, содержащая многоразовый жидкостный ракетный двигатель с корпусом, топливными баками компонентов топлива и аэродинамическими стабилизаторами, отличающаяся тем, что в ней места крепления аэродинамических стабилизаторов к корпусу выполнены в поперечной плоскости ступени выше центра масс ступени по направлению к верхней точке ступени и с возможностью выдвижения и снабжены фиксаторами перемещения относительно тросов устройства системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем при посадке.
| Устройство для посадки возвращаемой ступени ракеты-носителя | 2020 |
|
RU2740525C1 |
| US 5667167 A, 16.09.1997 | |||
| Металлоконструкция для остеосинтеза костей | 1986 |
|
SU1637769A1 |
| АВИАЦИОННО-КОСМИЧЕСКИЙ СТАРТОВЫЙ КОМПЛЕКС "МАРС" | 2001 |
|
RU2215673C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОСМИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2131383C1 |

