Изобретение относится к области ракетно-космической техники, а более конкретно к многокамерным жидкостным ракетным двигателям, предназначенным для повторного использования после посадки отработанной ступени ракеты-носителя, и может быть использовано при создании многокамерных жидкостных ракетных двигателе ракет - носителей выведения коммерческих объектов на орбиты, обеспечивающих возврат и спасение отработавших двигательных блоков, включающих топливные баки и многоразовые жидкостные ракетные двигатели первых ступеней ракеты, что при выполнении коммерческих пусков является актуальной задачей.
Известны системы возврата двигательного ракетного блока с использованием парашютных систем, проекты возврата ракетного блока с использованием аэродинамического крыла с заходом на посадку и посадку на аэродроме (патент РФ № 2442727 от 20.09.2010 г. МПК B64G 1/14, B64G 1/62).
Недостатком такой системы спасения является необходимость введения в конструкцию ракетного блока самолетных систем, дополняющих первую ступень ракетного блока до варианта крылатого ракетного блока, что хотя и позволяет приземлить ступень планированием на аэродром возврата, однако дополняет новыми системами управления, что не всегда целесообразно, тем более для обеспечения возврата уже разработанных ракет - носителей с многокамерными жидкостными ракетными двигателями с управляемым вектором тяги, снабженными неподвижными камерами и камерами управления и широко применяемых для выведения полезных коммерческих грузов, позволяющих применять только незначительные конструктивные изменения, не требующие дополнительных испытаний и времени для их подтверждения.
Известен многокамерный жидкостный ракетный двигатель с управляемым вектором тяги, содержащий газогенератор, турбонасосный агрегат с насосами, входы которых соединены с топливными баками двигательной установки, раму, выступающую конусной центральной частью относительно периферийной донную защиту, несколько неподвижных примонтированных к раме камер в центральной части, размещенных симметрично относительно продольной оси симметрии двигателя, соединенных кронштейнами с цапфами, установленными с возможностью вращения в траверсах посредством рулевых машинок, узлов качания камер управления, расположенных по периферии в секторах между неподвижными камерами в плоскостях стабилизации, соединенные магистралями с полостями после насосов турбонасосного агрегата, (патент РФ № 2703076. МПК F02K 9/80 от 01.07.2019 г. ) - прототип.
Известный многокамерный жидкостный ракетный двигатель с управляемым вектором тяги позволяет использовать его в ракете-носителе, предназначенной для работы, в том числе и в составе возвращаемой отработанной ступени ракеты - носителя с использованием системы обеспечения посадки отработавшей ступени с многоразовым жидкостным ракетным двигателем, так как обладает рядом преимуществ, а именно, возможностью использования не только неподвижных камер большой тяги основного жидкостного ракетного двигателя для торможения и уравновешивания силы тяжести ступени ракеты - носителя, но и рулевых камер значительно меньшей тяги по сравнению с тягой основного жидкостного ракетного двигателя для выполнения той же задачи. Тяга применяемых для этих целей камер управления является достаточной для уравновешивания в динамике приземления массы ступени ракеты - носителя с остатками компонентов топлива и газов наддува в топливных баках, в том числе и массы жидкостного ракетного двигателя, находящегося в выключенном состоянии.
Недостатком такого многокамерного жидкостного ракетного двигателя с управляемым вектором тяги с камерами управления, предназначенными для управления вектором тяги, является то, что камеры управления установлены с возможностью качания в плоскостях, расположенных параллельно плоскостям главных плоскостей стабилизации. За счет этого продукты сгорания камер управления попадают в донную область как в процессе спуска, так и особенно при непосредственном приземлении за счет отражения продуктов сгорания от конструкций стола приземления, даже дополнительно дооборудованного газоотводящим тоннелем. Это может вызвать воздействие продуктов сгорания на неподвижные камеры многокамерного жидкостного ракетного двигателя с управляемым вектором тяги, что потребует длительной экспертизы сопел неподвижных камер многокамерного жидкостного ракетного двигателя с управляемым вектором тяги, днища и боковых стенок топливного бака, агрегатов рулевого блока, в том числе и самих камер управления, что удлиняет время предполетной подготовки многокамерного жидкостного ракетного двигателя с управляемым вектором тяги. Установка камер управления на значительном расстоянии от продольной оси симметрии многокамерного жидкостного ракетного двигателя с управляемым вектором тяги в периферийной его части для уменьшения теплового и газодинамического воздействия продуктов сгорания камер управления потребует увеличения радиальных габаритов многокамерного жидкостного ракетного двигателя с управляемым вектором тяги. При этом требуется доработка конструкции рамы с увеличением не только радиальных, но и продольных размеров двигателя, что повышает массу многокамерного жидкостного ракетного двигателя с управляемым вектором тяги. Кроме того, в некоторых случаях, особенно для ступеней - ракет носителей с криогенными компонентами топлива, из-за этого теплового воздействия проникающих в центральную часть двигательного отсека продуктов сгорания возникает необходимость нанесения тепловой изоляции не только с внешней части корпуса топливного бака, но и в его центральной части, увеличивая теплоизоляцию донной защиты, что повышает массу и так уже повышенную из-за снабжения ступени ракеты - носителя раскрываемыми опорами приземления и сопутствующими им механизмами для касания с поверхностью стола приземления в вертикальном положении. В некоторых случаях приземления отработанной ступени ракеты - носителя при повреждении теплоизоляции затрудняется ее восстановление, потому что это в составе ступени ракеты - носителя не всегда возможно, так как нанесение теплоизоляции на отдельные составные элементы топливного бака перед сборкой ступени технологически является более предпочтительным, гарантирующим объективный контроль состава и толщины нанесения.
Задачей предлагаемого изобретения является повышение ресурса работы основного жидкостного ракетного двигателя, упрощение средств защиты от теплового воздействия на агрегаты двигателя при вертикальной посадке возвращаемой ступени ракеты - носителя, уменьшение массы средств тепловой изоляции топливных баков и агрегатов центрального основного жидкостного ракетного двигателя.
Задачей предлагаемого изобретения является также уменьшение продольных и радиальных габаритов периферийных частей двигателя и снижение в итоге массы многокамерного жидкостного ракетного двигателя с управляемым вектором тяги.
Указанная выше задача изобретения решается тем, что в известном многокамерном жидкостном ракетном двигателе с управляемым вектором тяги, содержащем газогенератор, турбонасосный агрегат с насосами, входы которых соединены с топливными баками двигательной установки, раму, выступающую конусной центральной частью относительно периферийной, донную защиту, несколько неподвижных примонтированных к раме камер в центральной части, размещенных симметрично относительно продольной оси симметрии двигателя, соединенных кронштейнами с цапфами, установленными с возможностью вращения в траверсах посредством рулевых машинок, узлов качания камер управления, расположенных по периферии в секторах между неподвижными камерами в плоскостях стабилизации, соединенные магистралями с полостями после насосов турбонасосного агрегата, а согласно изобретению, траверса и цапфа каждого узла качания расположены внутри конусной центральной части донной защиты, узел соединения кронштейна с цапфой выполнен в виде балки крепления камеры управления через перпендикулярный своей осью симметрии относительно цапфы и продольной оси симметрии камеры управления цилиндрический шарнир, а балка снабжена приводом поворота камеры управления вокруг цилиндрического шарнира.
Указанная выше задача изобретения решается также тем, что балка крепления камеры управления своей продольной осью симметрии установлена под периферийной частью донной защиты под острым углом к плоскости последней.
Предлагаемый многокамерный жидкостный ракетный двигатель с управляемым вектором тяги приведен на чертеже (фиг. 1-9), (фиг. 1 - аксонометрическое изображение многокамерного жидкостного ракетного двигателя с управляемым вектором тяги в составе ступени ракеты - носителя 39 в режиме приземления с отклоненными от продольной оси симметрии 13 двигателя камерами управления 19 с опорами приземления 41 в раскрытом состоянии, фиг. 2 - продольный разрез (А-А) и общий вид сбоку на многокамерный жидкостный ракетный двигатель с управляемым вектором тяги ракеты - носителя 39 в режиме выведения, где камеры управления 19 расположены своими продольными осями симметрии 34 в плоскостях, параллельных основным плоскостям стабилизации 22 и 23, а опоры приземления 41 находятся в сложенном положении по периметру топливного бака окислителя 9, фиг. 3 - общий вид снизу на многокамерный жидкостный ракетный двигатель; где изображено расположение камер управления 19 относительно неподвижных камер 11 жидкостного ракетного двигателя в режиме выведения (А) и приземления (Б), где камеры управления 19 расположены своими продольными осями симметрии 34 в плоскостях, параллельных основным плоскостям стабилизации 22 и 23 (А), или под острым углом к ним (Б), а опоры приземления 41 находятся в соответствующих положениях по периметру топливного бака окислителя 9 (А) или (Б), фиг. 4 - продольный разрез многокамерного жидкостного ракетного двигателя; где изображено расположение камер управления относительно неподвижных камер 11 жидкостного ракетного двигателя в режиме приземления ступени ракеты - носителя 39 и агрегаты многокамерного жидкостного ракетного двигателя с управляемым вектором тяги; фиг. 5 - аксонометрическое изображение многокамерного жидкостного ракетного двигателя с управляемым вектором тяги в составе ступени ракеты - носителя 39 в режиме выведения с расположением балки 33 под острым углом 37 к плоскости 38 периферийной части 16 донной защиты 14, продольными осями симметрии 34 камер управления 19 в плоскостях, параллельных главным плоскостям стабилизации 22 и 23, с опорами приземления 41 в сложенном состоянии, фиг. 6 - аксонометрическое изображение узла качания камеры управления в режиме возвращения ступени ракеты - носителя 39 (продольная ось симметрии 36 балки 33 расположена параллельно плоскости 38 периферийной части 16 донной защиты 14 или на значительно меньший острый угол, чем острый угол 37), фиг. 7 - аксонометрическое изображение узла качания камеры управления 19 в режиме выведения ступени ракеты - носителя 39 (продольная ось симметрии 36 балки 33 расположена под острым углом 37 по отношению к плоскости 38 периферийной части 16 донной защиты 14), фиг. 8 - местный вид сбоку В на узел качания 18 (фиг. 4) камеры управления 19 с узлом соединения 32 балки 33 с цапфой 28 и приводом 36 поворота камеры управления 19 вокруг цилиндрического шарнира 35 в режиме выведения, фиг. 9 - местный вид сбоку Г на узел качания 18 камеры управления 19 с узлом соединения 32 балки 33 с цапфой 28 и приводом 36 поворота камеры управления 19 вокруг цилиндрического шарнира 35 в режиме приземления), где показаны следующие агрегаты:
1. Газогенератор;
2. Турбонасосный агрегат;
3. Насос горючего;
4. Насос окислителя;
5 Вход насоса горючего;
6. Топливный бак горючего;
7. Двигательная установка;
8. Вход насоса окислителя;
9. Топливный бак окислителя;
10. Рама;
11. Неподвижная камера;
12. Центральная часть;
13. Продольная ось симметрии двигателя;
14. Донная защита;
15. Конусная центральная часть донной защиты;
16. Периферийная часть;
17. Проем;
18. Узел качания;
19. Камера управления;
20. Периферия многокамерного жидкостного ракетного двигателя с управляемым вектором тяги;
21. Сектор;
22, 23. Главные плоскости стабилизации;
24. Магистраль;
25. Полость после насоса горючего;
26. Полость после насоса окислителя;
27. Кронштейн;
28. Цапфа;
29. Траверса;
30. Рулевая машинка;
31. Траверса;
32. Узел соединения;
33. Балка;
34. Продольная ось симметрии;
35. Цилиндрический шарнир;
36. Привод;
37. Острый угол;
38. Плоскость;
39. Ступень ракеты-носителя;
40. Устройство приземления;
41. Опора приземления.
Многокамерный жидкостный ракетный двигатель с управляемым вектором тяги содержит газогенератор 1, турбонасосный агрегат 2 с насосом горючего 3 и насосом окислителя 4. Вход 5 насоса горючего 3 соединен с топливным баком горючего 6 двигательной установки 7. Вход 8 насоса окислителя 4 соединен с топливным баком окислителя 9 двигательной установки 7. К раме 10 примонтировано несколько неподвижных камер 11 в центральной части 12 многокамерного жидкостного ракетного двигателя с управляемым вектором тяги, размещенных симметрично относительно продольной оси симметрии двигателя 13. Донная защита 14 содержит выступающую конусную центральной часть 15 относительно периферийной части 16 донной защиты 14. Примонтированные к раме 10 неподвижные камеры 11 установлены в проемы 17 выступающей конусной центральной части 15 и периферийной части 16 донной защиты 14. Узлы качания 18 камер управления 19, расположенных по периферии многокамерного жидкостного ракетного двигателя с управляемым вектором тяги 20 в секторах 21 между неподвижными камерами 11 в главных плоскостях стабилизации 22 и 23 и соединенных магистралями 24 с полостями 25 и 26 после насосов горючего 3 и окислителя 4 соответственно турбонасосного агрегата 2, соединенных кронштейнами 27 с цапфами 28, установленными с возможностью вращения в траверсах 29 посредством рулевых машинок 30. Траверса 29 и 31 и цапфа каждого узла качания 18 расположена внутри конусной центральной части 15 донной защиты 14. Узел соединения 32 кронштейна 27 с цапфой 28 выполнен в виде балки 33 крепления камеры управления 19 через перпендикулярный своей осью симметрии относительно цапфы 28 и продольной оси симметрии 34 камеры управления 19 цилиндрический шарнир 35, а балка 33 снабжена приводом 36 поворота камеры управления 19 вокруг цилиндрического шарнира 35. Балка 33 крепления камеры управления 19 своей продольной осью симметрии 34 установлена под периферийной частью 16 донной защиты 14 под острым углом 37 к плоскости 38 периферийной части 16 донной защиты 14. Продольная ось симметрии 34 камеры управления 19 в исходном положении расположена вдоль продольной оси симметрии двигателя 13, а на режиме выведения расположена в плоскости качания, параллельной одной из главных плоскостей стабилизации 22 или 23.
Многокамерный жидкостный ракетный двигатель с управляемым вектором тяги работает следующим образом. При работе двигательной установки 7 ступени ракеты - носителя 39 на режиме выведения полезной нагрузки одновременно работают неподвижные камеры 11 в центральной части 12 многокамерного жидкостного ракетного двигателя с управляемым вектором тяги и камеры управления 19. С помощью приводов 36 балки 33 переведены в положение под острым углом 37 к плоскости 38 периферийной части 16 донной защиты 14, а плоскости качания камер управления 19 расположены параллельно основным плоскостям стабилизации 22 или 23. В нейтральном положении продольные оси симметрии 34 камер управления 19 расположены параллельно продольной оси симметрии двигателя 13. После отделения ступени ракеты - носителя 39 от верхних ступеней и ориентации продольной осью симметрии 13 по направлению силы тяжести на устройство приземления 40, привод 36 обеспечивает перевод балки 33 в положение, соответствующее установке камер управления 19 под острым углом 37 к продольной оси симметрии двигателя 13, тем самим обеспечивает отклонение потока продуктов сгорания на внешнюю сторону пространства от донной защиты 14, в том числе и от периферийной части 16 в секторе 21 между раскрытыми опорами приземления 41 и между неподвижными камерами 11, обеспечивая после работы основных неподвижных камер 11 на режиме торможения и их выключения уравновешивание силы тяжести ступени ракеты-носителя 39 только продольной составляющей сил тяги камер управления 19, расположенных под острым углом 37 по отношению к продольной оси симметрии 13 двигателя. На режиме спуска камеры управления 19 с помощью рулевых машинок 30 обеспечивают управление положением ступени ракеты носителя 39 вплоть до соприкосновения опорами приземления 41 с устройством приземления 40. Продукты сгорания от камер управления 19 в меньшей степени воздействуют на ступень ракеты-носителя 39, на донную защиту 14, в том числе и на ее периферийную часть 16, топливный бак окислителя 9 и на выступающие из донной защиты сопла неподвижных камер 11.
Применение предлагаемого изобретения позволит повысить ресурс работы основного жидкостного ракетного двигателя, упростить средства защиты от теплового воздействия на агрегаты двигателя при вертикальной посадке возвращаемой ступени ракеты - носителя, уменьшить массу средств тепловой изоляции топливных баков и агрегатов центрального основного жидкостного ракетного двигателя и уменьшить продольные и радиальные габариты периферийных частей двигателя и снизить в итоге массу многокамерного жидкостного ракетного двигателя с управляемым вектором тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2703860C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2016 |
|
RU2611707C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2755363C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2725345C1 |
| ДВУХКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2016 |
|
RU2626618C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 2022 |
|
RU2784462C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2020 |
|
RU2739660C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2707015C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2709243C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |





Изобретение относится к области ракетно-космической техники. Многокамерный жидкостной ракетный двигатель с управляемым вектором тяги содержит газогенератор, турбонасосный агрегат с насосами, входы которых соединены с топливными баками двигательной установки, раму, выступающую конусной центральной частью относительно периферийной, донную защиту, несколько неподвижных примонтированных к раме камер в центральной части, размещенных симметрично относительно продольной оси симметрии двигателя, соединенных кронштейнами с цапфами, установленными с возможностью вращения в траверсах посредством рулевых машинок, узлов качания камер управления, расположенных по периферии в секторах между неподвижными камерами в плоскостях стабилизации, соединенные магистралями с полостями после насосов турбонасосного агрегата. Траверса и цапфа каждого узла качания расположены внутри конусной центральной части донной защиты. Узел соединения кронштейна с цапфой выполнен в виде балки крепления камеры управления через перпендикулярный своей осью симметрии относительно цапфы и продольной оси симметрии камеры управления цилиндрический шарнир. Балка снабжена приводом поворота камеры управления вокруг цилиндрического шарнира. При реализации изобретения обеспечивается повышение ресурса работы основного жидкостного ракетного двигателя, упрощение средств защиты от теплового воздействия на агрегаты двигателя при вертикальной посадке возвращаемой ступени ракеты-носителя, уменьшение массы средств тепловой изоляции топливных баков и агрегатов центрального основного жидкостного ракетного двигателя. 1 з.п. ф-лы, 9 ил.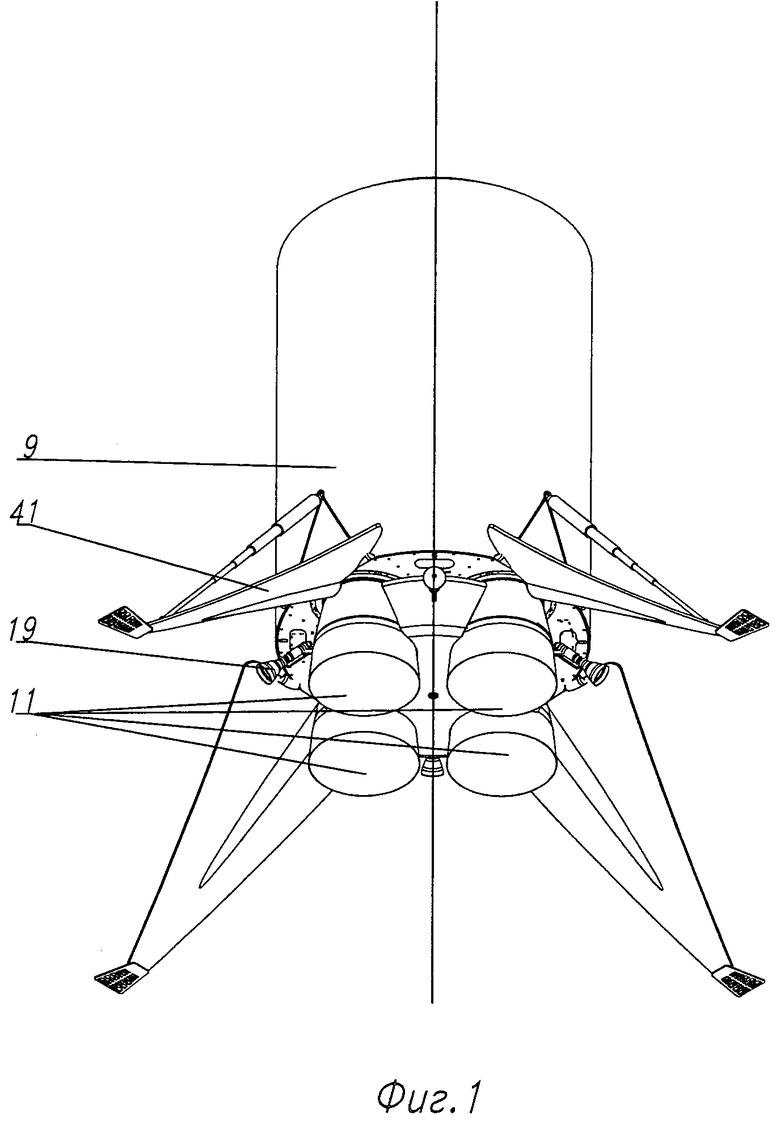
1. Многокамерный жидкостный ракетный двигатель с управляемым вектором тяги, содержащий газогенератор, турбонасосный агрегат с насосами, входы которых соединены с топливными баками двигательной установки, раму, выступающую конусной центральной частью относительно периферийной донной защиты, несколько неподвижных примонтированных к раме камер в центральной части, размещенных симметрично относительно продольной оси симметрии двигателя, соединенные кронштейнами с цапфами, установленными с возможностью вращения в траверсах посредством рулевых машинок узлов качания камер управления, расположенных по периферии в секторах между неподвижными камерами в плоскостях стабилизации, соединенные магистралями с полостями после насосов турбонасосного агрегата, отличающийся тем, что в нем траверса и цапфа каждого узла качания расположены внутри конусной центральной части донной защиты, узел соединения кронштейна с цапфой выполнен в виде балки крепления камеры управления через перпендикулярный своей осью симметрии относительно цапфы и продольной оси симметрии камеры управления цилиндрический шарнир, а балка снабжена приводом поворота камеры управления вокруг цилиндрического шарнира.
2. Многокамерный жидкостный ракетный двигатель с управляемым вектором тяги по п. 1, отличающийся тем, что с целью уменьшения осевых габаритов периферийных частей двигателя в нем балка крепления камеры управления своей продольной осью симметрии установлена под периферийной частью донной защиты под острым углом к плоскости последней.
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2703076C1 |
| МНОГОРАЗОВЫЙ РАКЕТНО-АВИАЦИОННЫЙ МОДУЛЬ И СПОСОБ ЕГО ВОЗВРАЩЕНИЯ НА КОСМОДРОМ | 2010 |
|
RU2442727C1 |
| WO 2000058619 A1, 05.10.2000 | |||
| US 20150101337 A1, 16.04.2015. | |||

