Область техники
[0001]
Настоящее изобретение относится к способу предсказания движения другого транспортного средства и устройству предсказания движения другого транспортного средства.
Уровень техники
[0002]
Некоторое время назад было известно устройство, которое предсказывает вмешательство второго транспортного средства, которое движется по соседней полосе движения, соседней с собственной полосой движения, по которой движется собственное транспортное средство, в собственную полосу движения и управляет скоростью собственного транспортного средства (см. Патентную литературу 1). Устройство, раскрытое в Патентной литературе 1, вычисляет угол, образованный вектором движения второго транспортного средства по отношению к вектору направления белой линии, нарисованной на поверхности дороги, и, если угол превышает предварительно заданный пороговый угол, определяет вмешательство посредством второго транспортного средства в собственную полосу движения.
Документы предшествующего уровня техники
Патентная литература
[0003]
Патентная литература 1: Находящаяся на рассмотрении патентная заявка Японии № 2001-199260
Сущность изобретения
Проблемы, решаемые изобретением
[0004]
Однако ширина полосы движения, по которой движется собственное транспортное средство, непостоянна и отличается от дороги к дороге, и в вышеупомянутой патентной литературе 1 это не учитывается. Если ширина полосы движения отличается, поведение второго транспортного средства будет отличаться, когда транспортное средство выполняет изменение курса, чтобы вызвать возможность возникновения ошибочного определения или задержки определения.
[0005]
Настоящее изобретение было сделано с учетом вышеупомянутых проблем, и его задача состоит в том, чтобы предоставить способ предсказания движения другого транспортного средства и устройство для предсказания движения другого транспортного средства для подавления ошибочного предсказания движения другого транспортного средства или задержки предсказания.
Средство для решения проблем
[0006]
Первым аспектом настоящего изобретения является способ предсказания движения другого транспортного средства, который вычисляет на основе поведения второго транспортного средства, движущегося по соседней полосе движения, вероятность смены полосы движения, указывающую вероятность того, что второе транспортное средство выполнит смену полосы движения впереди собственного транспортного средства с соседней полосы движения на собственную полосу движения, по которой движется собственное транспортное средство, и с использованием вероятности смены полосы движения и порогового значения предсказывает смену полосы движения, которая должна выполняться вторым транспортным средством. Способ предсказания движения другого транспортного средства согласно первому аспекту получает информацию, указывающую ширину полосы движения для соседней полосы движения, корректирует в соответствии с шириной полосы движения соседней полосы движения по меньшей мере одно из вероятности смены полосы движения и порогового значения и путем сравнения вероятности смены полосы движения после коррекции с пороговым значением до коррекции, или путем сравнения вероятности смены полосы движения до коррекции с пороговым значением после коррекции, или путем сравнения вероятности смены полосы движения после коррекции с пороговым значением после коррекции определяет, выполняет ли второе транспортное средство смену полосы движения.
[0007]
Второй аспект настоящего изобретения представляет собой способ предсказания движения другого транспортного средства, который вычисляет на основе поведения второго транспортного средства, движущегося по соседней полосе движения, вероятность смены полосы движения, указывающую вероятность того, что второе транспортное средство выполнит смену полосы движения впереди собственного транспортного средства с соседней полосы движения на собственную полосу движения, по которой движется собственное транспортное средство, и с использованием вероятности смены полосы движения и порогового значения предсказывает смену полосы движения, которая должна выполняться вторым транспортным средством. Способ предсказания движения другого транспортного средства согласно второму аспекту получает информацию, указывающую положение второго транспортного средства, корректирует в соответствии с положением второго транспортного средства по меньшей мере одно из вероятности смены полосы движения и порогового значения, и путем сравнения вероятности смены полосы движения после коррекции с пороговым значением до коррекции, или путем сравнения вероятности смены полосы движения до коррекции с пороговым значением после коррекции, или путем сравнения вероятности смены полосы после коррекции с пороговым значением после коррекции, определяет, выполняет ли второе транспортное средство смену полосы движения.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0008]
Согласно первому аспекту и второму аспекту настоящего изобретения можно подавить ошибочное предсказание движения второго транспортного средства или задержку предсказания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009]
Фиг.1 - блок-схема, иллюстрирующая конфигурацию устройства предсказания движения другого транспортного средства согласно первому и второму вариантам осуществления.
Фиг.2 - это блок-схема последовательности операций, иллюстрирующая первый пример работы устройства предсказания движения другого транспортного средства, показанного на Фиг.1, согласно способу предсказания движения другого транспортного средства, относящемуся к первому варианту осуществления.
Фиг.3 - это блок-схема последовательности операций, иллюстрирующая первый пример работы устройства предсказания движения другого транспортного средства, показанного на Фиг.1, согласно способу предсказания движения другого транспортного средства, относящемуся ко второму варианту осуществления.
Фиг. 4A - вид сверху, иллюстрирующий пример сцен вождения, в которых устройство помощи при вождении, относящееся к первому и второму вариантам осуществления, эффективно функционирует, когда ширина полосы движения является узкой.
Фиг. 4B - вид сверху, иллюстрирующий пример сцен вождения, в которых устройство помощи при вождении, относящееся к первому и второму вариантам осуществления, эффективно функционирует, когда ширина полосы движения является широкой.
Фиг.5A - вид сверху, иллюстрирующий пример степеней близости (расстояние 37 между транспортными средствами) второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a, движущемуся впереди второго транспортного средства 12, когда ширина полосы движения является узкой.
Фиг. 5B - вид сверху, иллюстрирующий пример степеней близости (расстояние 37 между транспортными средствами) второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a, движущемуся впереди второго транспортного средства 12, когда ширина полосы движения является широкой.
Фиг. 5C - вид сверху, иллюстрирующий пример степеней близости (расстояние 37 между транспортными средствами), когда первое предшествующее транспортное средство 13b является большим.
Фиг.6А - вид сверху, иллюстрирующий первое расстояние 38а между транспортными средствами между вторым транспортным средством 12 и собственным транспортным средством 11, когда первое расстояние 38а между транспортными средствами является коротким.
Фиг.6B - вид сверху, иллюстрирующий первое расстояние 38b между транспортными средствами между вторым транспортным средством 12 и собственным транспортным средством 11, когда первое расстояние 38b между транспортными средствами является длинным.
Фиг.7А - вид сверху, иллюстрирующий второе расстояние 39а между транспортными средствами между собственным транспортным средством 11 и вторым предшествующим транспортным средством 14, движущимся впереди собственного транспортного средства 11, когда ширина полосы движения является узкой.
Фиг.7В - вид сверху, иллюстрирующий второе расстояние 39а между транспортными средствами между собственным транспортным средством 11 и вторым предшествующим транспортным средством 14, движущимся впереди собственного транспортного средства 11, когда ширина полосы движения является широкой, а второе расстояние 39а между транспортными средствами является коротким.
Фиг.7С - вид сверху, иллюстрирующий второе расстояние 39b между транспортными средствами между собственным транспортным средством 11 и вторым предшествующим транспортным средством 14, когда ширина полосы движения является широкой, а второе расстояние 39b между транспортными средствами является длинным.
Фиг. 8 - таблица, иллюстрирующая пример таблиц, показывающих взаимосвязи между второй величиной близости, углом θ и вероятностью смены полосы движения.
РЕЖИМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0010]
Со ссылкой на чертежи варианты осуществления будут объяснены подробно.
[0011]
(Первый вариант осуществления)
Устройство предсказания движения другого транспортного средства и способ предсказания движения другого транспортного средства согласно первому варианту осуществления эффективно функционируют, например, в сценах вождения, таких как те, которые проиллюстрированы на фиг. 4A и 4B. Фиг. 4A изображает дорогу с односторонним движением, образованную двумя полосами (G1, G2) движения, сцена вождения, в которой собственное транспортное средство 11 движется по левой полосе (собственной полосе движения) G1 движения, а второе транспортное средство 12 движется по правой полосе (соседняя полоса) G2 движения, которая является полосой, соседней с собственной полосой движения. Второе транспортное средство 12 движется по диагонали впереди собственного транспортного средства 11. С другой стороны, фиг. 4B отличается от фиг. 4A тем, что фиг. 4B представляет собой дорогу с односторонним движением, образованную двумя полосами движения (G1, G2) движения, ширина полосы которых (далее именуемая «ширина полосы движения») шире, чем ширина двух полос (G1, G2) движения на фиг. 4A. Другие части сцены вождения на фиг. 4B такие же, как и части сцены вождения на фиг. 4A.
[0012]
В сценах движения на фиг. 4A и 4B, второе транспортное средство 12 может управляться любым из автоматического или ручного вождения. «Автоматическое вождение» - это режим вождения, при котором заранее определенное устройство управления движением транспортного средства активно выполняет часть или все распознавание, принятие решения и операцию, относящуюся к вождению транспортного средства. Кроме того, «ручное вождение» - это режим вождения, в котором водитель, то есть человек, находящийся во втором транспортном средстве 12, выполняет вождение транспортного средства.
[0013]
Первый вариант осуществления вычисляет вероятность смены полосы движения в соответствии с поведением второго транспортного средства 12 и с использованием вероятности смены полосы движения и порогового значения предсказывает смену полосы движения, которая должна быть проведена вторым транспортным средством 12. Другими словами, с использованием вероятности смены полосы движения и порогового значения определяется, выполняет ли второе транспортное средство 12 смену полосы движения. «Вероятность смены полосы движения» указывает вероятность того, что второе транспортное средство 12 может провести смену полосы движения перед собственным транспортным средством 12 с соседней полосы G2 движения на собственную полосу G1 движения. «Смена полосы движения» является примером движения второго транспортного средства 12.
[0014]
Как показано на. 4A и 4B, если ширина (32a, 32b) полосы движения для соседней полосы G2 движения отличается, будет различие в поведении второго транспортного средства 12 во время проведения смены полосы движения. Например, во время смены полосы движения, ориентация (включая направление движения, направление оси и угол рыскания), направление движения, расстояние движения (величина близости) в направлении ширины транспортного средства и траектория вождения второго транспортного средства 12 меняется в зависимости от ширины (32a, 32b) полосы движения для соседней полосы G2 движения. Соответственно, первый вариант осуществления получает информацию, указывающую ширину (32a, 32b) полосы движения для соседней полосы G2 движения, и в соответствии с шириной (32a, 32b) полосы движения корректирует по меньшей мере одно из вероятности смены полосы движения и порогового значения. После этого в первом варианте осуществления сравнивается вероятность смены полосы движения после коррекции с пороговым значением до коррекции, или сравнивается вероятность смены полосы движения до коррекции с пороговым значением после коррекции, или сравнивается вероятность смены полосы движения после коррекции с пороговым значением после коррекции и, таким образом, предсказывает смену полосы движения, которая должна быть проведена вторым транспортным средством 12. Учет ширины (32a, 32b) полосы движения для соседней полосы G2 движения при предсказании смены полосы движения позволяет подавить ошибочное предсказание смены полосы движения или задержку предсказания. Какая из вероятности смены полосы движения и порогового значения корректируется, может выбирать пользователь (например, водитель собственного транспортного средства 11).
[0015]
Ниже подробно поясняется способ предсказания движения другого транспортного средства и устройство предсказания движения другого транспортного средства согласно первому варианту осуществления. Между прочим, сцены вождения, такие как показанные на фиг. 4A и 4B - примеры сцен вождения, в которых эффективно функционируют способ предсказания движения другого транспортного средства и устройство предсказания движения другого транспортного средства согласно первому варианту осуществления, и не предназначены для ограничения масштабов, в которых применим способ предсказания движения другого транспортного средства и устройство предсказания движения другого транспортного средства согласно первому варианту осуществления.
[0016]
Со ссылкой на фиг.1 будет объяснена конфигурация устройства предсказания движения другого транспортного средства согласно первому варианту осуществления. Устройство предсказания движения другого транспортного средства имеет блок управления. Блок управления предсказывает, что на основе поведения второго транспортного средства 12, движущегося по соседней полосе G2 движения, второе транспортное средство 12 может выполнять смену полосы движения перед собственным транспортным средством 11 с соседней полосы G2 движения на собственную полосу G1 движения. Блок управления имеет компонент 102 обнаружения объектов, компонент 101 оценки положения собственного транспортного средства, компонент 104 получения структуры полосы движения и микрокомпьютер.
[0017]
Компонент 102 обнаружения объектов установлен на собственном транспортном средстве 11 и включает в себя множество различных типов датчиков обнаружения объектов, таких как лазерный радар, радар миллиметрового диапазона, камеру, LiDAR (обнаружение и определение дальности с помощью света) и т.п. для обнаружения объектов вокруг собственного транспортного средства 11. Компонент 102 обнаружения объектов использует множество датчиков обнаружения объектов и обнаруживает объекты вокруг собственного транспортного средства 11. Компонент 102 обнаружения объектов обнаруживает второе транспортное средство 12, такое как двухколесное транспортное средство, легкое транспортное средство, такое как велосипед, движущийся объект, такой как пешеход, и неподвижный объект, такой как припаркованное транспортное средство. Например, он определяет по отношению к собственному транспортному средству 11 положение, ориентацию, направление движения, размер, скорость, ускорение, замедление, скорость рыскания движущегося объекта или неподвижного объекта. Положение, ориентация, направление движения, размер, скорость, ускорение, замедление и скорость рыскания объекта вместе именуются «поведением» объекта. Среди объектов второе транспортное средство 12 является объектом определения смены полосы движения и поведение которого соответствует «величине состояния», используемой для вычисления вероятности смены полосы движения.
[0018]
Компонент 102 обнаружения объектов объединяет множество результатов обнаружения, полученных от множества датчиков обнаружения объектов, и выводит один результат обнаружения для каждого объекта. Точнее, из поведения объекта, полученного от соответствующих датчиков обнаружения объектов, он вычисляет, принимая во внимание характеристики ошибок и т.п. соответствующих датчиков обнаружения объектов, наиболее разумное и наименее ошибочное поведение объекта. Более подробно, он использует известную технику объединения датчиков, чтобы в целом оценить результаты обнаружения, полученные от различных типов датчиков, и получить более точный результат обнаружения.
[0019]
Компонент 102 обнаружения объектов отслеживает обнаруженный объект. Точнее, на основе консолидированного результата обнаружения и поведения объекта, выведенного в разное время, проверяет (соответствует) одинаковость объекта в разные моменты времени и на основе соответствия предсказывает поведение объекта. Между прочим, поведение объекта, выводимое в разное время, сохраняется в памяти микрокомпьютера и используется для предсказания движения второго транспортного средства 12, что будет объяснено позже.
[0020]
Компонент 102 обнаружения объектов выводит, в качестве результата обнаружения, поведение двухмерного объекта, например, с видом сверху от собственного транспортного средства 11, видимым сверху с воздуха.
[0021]
Поведение второго транспортного средства 12 выражается любым из двух или более положений или их комбинацией, включая абсолютное положение и относительное положение, ориентацию, направление движения, скорость, ускорение и траекторию вождения второго транспортного средства 12. Между прочим, траектория вождения второго транспортного средства 12 указывает временной ряд положений второго транспортного средства 12. Например, когда поведение второго транспортного средства 12 выражается комбинацией траектории вождения и скорости, поведение второго транспортного средства 12 включает в себя профиль положений второго транспортного средства 12 в разное время и профиль скоростей второго транспортное средство в соответствующих положениях.
[0022]
В качестве альтернативы, поведение второго транспортного средства 12 может быть выражено одним или комбинацией из двух или более углов, образованных ориентацией или направлением движения второго транспортного средства 12 относительно направления полосы движения соседней полосы движения (правая полоса G2 движения) или собственной полосы движения (левая полоса G1 движения), положения по ширине полосы движения второго транспортного средства 12 в соседней полосе движения, скорости второго транспортного средства 12, ускорения второго транспортного средства 12 и замедления второго транспортного средства. 12.
[0023]
Компонент 101 оценки положения собственного транспортного средства имеет датчик обнаружения положения, такой как приемник, для приема сигнала GPS (глобальной системы позиционирования) для измерения положения (абсолютное положение) и ориентации (абсолютная ориентация) собственного транспортного средства 11 по наземным координатам. Кроме того, компонент 101 оценки положения собственного транспортного средства имеет схему вычислительной обработки для выполнения одометрии и точного исчисления. Точнее, компонент 101 оценки положения собственного транспортного средства использует датчик скорости колеса для определения скорости каждого колеса собственного транспортного средства 11, датчик угла поворота рулевого колеса для определения угла поворота рулевого колеса и схемы вычислительной обработки для измерения относительного положения, относительной ориентации и скорости собственного транспортного средства 11 относительно заданной контрольной точки. Информация, указывающая абсолютное положение, абсолютную ориентацию, относительное положение и относительную ориентацию собственного транспортного средства 11, называется «информацией, указывающей положение и ориентацию собственного транспортного средства 11». Компонент 101 оценки положения собственного транспортного средства способен обнаруживать на основе информации, указывающей положение и ориентацию собственного транспортного средства 11, положение и ориентацию собственного транспортного средства 11 на карте. Карта обеспечивается данными карты, заранее сохраненными в базе 111 картографических данных.
[0024]
Компонент 104 получения структуры полосы движения получает информацию, указывающую структуру дороги, включающей левую полосу G1 движения и правую полосу G2 движения, и структуру каждой полосы движения (G1, G2), образующей дорогу. Естественно, если не указан объект для определения смены полосы движения, можно получить, без особого указания в качестве полосы движения, информацию о полосах движения, соседних с каждой стороной левой полосы G1 движения. Например, устройство предсказания движения другого транспортного средства может иметь базу 111 картографических данных. Картографические данные, хранящиеся в базе 111 картографических данных, содержат данные, указывающие структуру дороги, включающей собственную полосу G1 движения и правую полосу G2 движения, а также структуру каждой полосы движения, образующей дорогу. Компонент 104 получения структуры полосы движения осуществляет доступ к базе 111 картографических данных и может получить информацию (картографические данные), указывающую структуру дороги и структуру полосы движения. Компонент 104 получения структуры полосы движения может получать не только картографические данные, но также информацию (информацию о правилах дорожного движения), указывающую правила дорожного движения, относящиеся к дорогам вокруг собственного транспортного средства 11. База 111 картографических данных хранит информацию о правилах дорожного движения, связанную с структурами дорог и структурами полос движения. Между прочим, информация, указывающая структуру полосы движения, полученная компонентом 104 получения структуры полосы движения, содержит информацию, указывающую ширину полосы движения для каждой полосы движения (G1, G2). База 111 картографических данных может хранить информацию, указывающую ширину полосы движения каждой полосы движения (G1, G2). Информация, полученная компонентом 104 получения структуры полосы движения, временно сохраняется в памяти микрокомпьютера, что будет объяснено позже.
[0025]
Между тем, база 111 картографических данных может быть установлена в собственном транспортном средстве 11 или может не быть установлена в нем. Если не установлена, компонент 104 получения структуры полосы движения может получать картографические данные и информацию о правилах дорожного движения извне транспортного средства, например, из интеллектуальной транспортной системы (ITS) или универсальной системы управления движением (UTMS) через связь между транспортными средствами (vehicle-to-vehicle) и связь между транспортным средством и дорожной инфраструктурой (vehicle-to-road) или мобильную связь, такую как 3G и LTE.
[0026]
Кроме того, компонент 104 получения структуры полосы движения может использовать камеру компонента 102 обнаружения объектов для получения изображения вокруг собственного транспортного средства 11 и распознавания по изображению нарисованной на дороге разметки полосы движения и дорожных знаков, указывающих правила дорожного движения и инструкции. Компонент 104 получения структуры полосы движения может получать из распознанной разметки полосы движения структуру дороги, структуру полосы движения и информацию о правилах дорожного движения. Разметка полосы движения, нарисованная на дороге, включает в себя линию 31 границы полосы движения для отделения соседней полосы движения (правая полоса G2 движения) от собственной полосы движения (левая полоса G1 движения), разметку 35 полосы движения (включая внешнюю линию дороги) для отделения левой полосы G1 движения от обочины дороги или придорожной полосы, соседней с левой полосой G1 движения, и разметку 36 полосы движения (включая внешнюю линию дороги) для отделения правой полосы G2 движения от обочины дороги или придорожной полосы, соседней с правой полосой G2 движения. А именно, компонент 104 получения структуры полосы движения может получать из линии 31 границы полосы движения и разметки 35 полосы движения информацию, указывающую ширину полосы движения для левой полосы G1 движения, и получать из линии 31 границы полосы движения и разметки 36 полосы движения информацию, указывающую ширину полосы движения для правой полосы G2 движения.
[0027]
Микрокомпьютер определяет, согласно результату обнаружения из компонента 102 обнаружения объектов, оцененному результату из компонента 101 оценки положения собственного транспортного средства и полученной информации из компонента 104 получения структуры полосы движения, выполняет ли второе транспортное средство 12 смену полосы движения.
[0028]
Микрокомпьютер представляет собой обычный микрокомпьютер, имеющий CPU (центральный процессор), память, такую как RAM и ROM, и компонент ввода/вывода. В микрокомпьютер установлена компьютерная программа (программа предсказания движения другого транспортного средства), чтобы заставить его функционировать как компонент устройства предсказания движения другого транспортного средства. Выполняя компьютерную программу, микрокомпьютер функционирует как множество схем (103, 105, 108) обработки информации устройства предсказания движения другого транспортного средства. Здесь, в качестве примера, множество схем (103, 105, 108) обработки информации устройства предсказания движения другого транспортного средства реализовано программно. Естественно, можно подготовить аппаратные средства для исключительного использования для выполнения информационных процессов, упомянутых ниже, чтобы составить схемы (103, 105, 108) обработки информации. Кроме того, множество схем (103, 105, 108) обработки информации может быть сформировано из дискретных аппаратных средств. Кроме того, схемы (103, 105, 108) обработки информации могут быть реализованы с помощью электронных блоков управления (ECU), которые также используются для других целей управления собственным транспортным средством 11. Согласно варианту осуществления, в качестве примера, микрокомпьютер также реализует схемы (109, 110) обработки информации, чтобы выполнять автоматическое вождение собственного транспортного средства 11 в соответствии с предсказанием движения для результата другого транспортного средства.
[0029]
Микрокомпьютер имеет, как и множество схем (103, 105, 108-110) обработки информации, компонент 103 формирования вариантов движения, компонент 105 вычисления вероятности, компонент 108 определения предсказания движения, компонент 109 формирования траектории собственного транспортного средства и компонент 110 управления транспортным средством.
[0030]
Компонент 103 формирования вариантов движения предсказывает, в соответствии со структурой дороги и структурой полосы движения, варианты движения, которые должны быть реализованы в ближайшем будущем вторым транспортным средством 12. Варианты движения, предсказываемые компонентом 103 формирования вариантов движения, включают в себя смену полосы движения. Компонент 103 формирования вариантов движения предсказывает, в соответствии со структурой дороги и структурой полосы движения (соседней полосы G2 движения), к которой принадлежит второе транспортное средство 12, намерение движения, как второе транспортное средство 12 будет двигаться далее, и вычисляет базовую траекторию второго транспортного средства в соответствии с намерением движения. «Вариант движения» - это более высокая концепция, включающая намерение движения и базовую траекторию. «Базовая траектория» указывает не только профиль положения второго транспортного средства в разное время, но также профиль скорости второго транспортного средства 12 в соответствующих положениях.
[0031]
Например, компонент 103 формирования вариантов движения предсказывает, как показано на фиг. 4A, намерение движения, при котором второе транспортное средство 12 продолжает двигаться по соседней полосе движения (правая полоса G2 движения), и вычисляет базовую траекторию, проходящую вдоль формы правой полосы G2 движения. Кроме того, компонент 103 формирования вариантов движения предсказывает намерение движения, при котором второе транспортное средство 12 выполняет смену полосы движения перед собственным транспортным средством 11 с соседней полосы движения (правая полоса G2 движения) на собственную полосу движения (левая полоса G1 движения). Затем компонент 103 формирования вариантов движения вычисляет в соответствии со структурой правой полосы G2 движения и структурой левой полосы G1 движения базовую траекторию, вдоль которой второе транспортное средство выполняет смену полосы перед собственным транспортным средством 11 с правой полосы G2 движения на левую полосу G1 движения.
[0032]
В этом варианте осуществления «смена полосы движения» включает в себя, как проиллюстрировано на фиг. 4A, смену полосы движения, которая должна выполняться в сцене вождения, в которой ряд транспортных средств не формируется в левой полосе G1 движения перед собственным транспортным средством 11, т.е. так называемая «обычная смена полосы движения». «Смена полосы движения» также включает в себя так называемое «вмешательство», которое выполняется в ряд транспортных средств, образованный перед собственным транспортным средством 11 на собственной полосе G1 движения. Здесь «вмешательство» является синонимом «вклинивания между машинами».
[0033]
(О компоненте 105 вычисления вероятности)
Компонент 105 вычисления вероятности вычисляет вероятность смены полосы движения согласно величине состояния, относящейся к смене полосы движения второго транспортного средства 12 (в данном случае просто величине состояния). «Вероятность смены полосы движения» указывает вероятность того, что второе транспортное средство 12 выполнит смену полосы движения перед собственным транспортным средством 11 с соседней полосы движения (правая полоса G2 движения) на собственную полосу движения (левая полоса G1 движения). Например, компонент 105 вычисления вероятности вычисляет вероятность смены полосы движения согласно углу θ (пример поведения), сформированному направлением движения второго транспортного средства 12 и направлением полосы движения для правой полосы G2 движения. Компонент 105 вычисления вероятности ссылается на таблицу, проиллюстрированную на фиг.8, и по углу θ, образованному между направлением движения второго транспортного средства 12 и линией 31 границы полосы движения (ниже просто упоминается как угол θ), вычисляет вероятность смены полосы движения. Если угол θ равен нулю, вероятность смены полосы движения равна нулю. Если угол θ составляет 15° или 30°, вероятность смены полосы движения составляет 0,5 или 1,0. А именно, чем больше угол θ, тем больше вероятность смены полосы движения. Направление полосы движения для правой полосы G2 движения соответствует направлению движения транспортного средства, движущегося по правой полосе G2 движения. Вместо направления полосы движения можно использовать направление линии 31 границы полосы движения, отделяющей левую полосу G1 движения от правой полосы G2 движения. По мере того, как угол θ увеличивается по сравнению с заранее определенным опорным значением, направление движения второго транспортного средства 12 больше наклоняется к левой полосе G1 движения. Соответственно, компонент 105 вычисления вероятности может вычислять более высокую вероятность смены полосы движения, когда угол θ становится больше. Между прочим, компонент 105 вычисления вероятности может вычислить вероятность смены полосы движения с использованием в качестве величины состояния второго транспортного средства 12 не только угла θ, но также ориентации (угла рыскания по отношению к правой полосе G2 движения) второго транспортного средства 12 или поведение второго транспортного средства 12, такое как направление движения второго транспортного средства 12 на основе, например, собственного транспортного средства вместо правой полосы G2 движения.
[0034]
Также, например, величина состояния может быть величиной, выражающей степень близости второго транспортного средства 12 к собственному транспортному средству 11 (здесь просто величина близости), то есть первой величиной близости или второй величиной близости, которые будут объяснены позже. «Первая величина близости» указывает расстояние (33a, 33b) в направлении ширины транспортного средства от центра собственного транспортного средства 11 до центра второго транспортного средства 12. Естественно, «первая величина близости» может быть расстоянием в направлении ширины транспортного средства от правой боковой поверхности собственного транспортного средства 11 до левой боковой поверхности второго транспортного средства 12. «Вторая величина близости» указывает расстояние (34a, 34b) в направлении ширины транспортного средства от линии 31 границы полосы движения до центра второго транспортного средства 12. Естественно, «вторая величина близости» может быть расстоянием в направлении ширины транспортного средства от линии 31 границы полосы движения до левой боковой поверхности второго транспортного средства 12.
[0035]
Например, при вычислении вероятности смены полосы движения с использованием второй величины близости компонент 105 вычисления вероятности может обращаться к таблице на фиг.8. Если вторая величина близости составляет 2,0 [м], вероятность смены полосы движения равна нулю. Если вторая величина близости составляет 1,0 [м] или ноль [м], вероятность смены полосы движения составляет 0,5 или 1,0. А именно, компонент 105 вычисления вероятности вычисляет более высокую вероятность смены полосы движения, когда вторая величина близости становится меньше. Например, можно заранее подготовить, также для первой величины близости, таблицу, подобную таблице на фиг. 8, и предварительно сохранить ее в памяти микрокомпьютера.
Данные, представленные в таблице на фиг. 8, заранее сохраняются в памяти микрокомпьютера.
[0036]
Компонент 105 вычисления вероятности корректирует вероятность смены полосы движения в соответствии с шириной (32a, 32b) полосы движения соседней полосы движения (правая полоса G2 движения). Точнее, компонент 105 вычисления вероятности изменяет на основе ширины (32a, 32b) полосы движения вес, применяемый к вероятности смены полосы движения, вычисленной в соответствии с величиной состояния (включая вышеупомянутые «поведение» и «величину близости»), используемой для вычисления вероятности смены полосы движения. Например, угол θ в случае ширины (32a) узкой полосы движения, показанной на фиг. 4A, сравнивается с углом θ в случае ширины (32b) широкой полосы движения, показанной на фиг. 4B. В случае ширины (32а) узкой полосы движения предполагается, что второе транспортное средство 12 выполняет смену полосы движения под углом θ меньшим, чем угол для ширины (32b) широкой полосы движения. Соответственно, при определении смены полосы движения будет принято решение о том, что второе транспортное средство 12 выполняет смену полосы движения под меньшим углом θ, когда ширина полосы движения становится уже. Соответственно, компонент 105 вычисления вероятности увеличивает, по мере того как ширина полосы движения становится меньше, вес, применяемый к вероятности смены полосы движения, вычисленной согласно углу θ. Умножение вероятности смены полосы движения, вычисленной с использованием угла θ, на увеличенный вес приводит к увеличению угла θ при вычислении вероятности смены полосы движения (увеличивает влияние угла θ на вероятность смены полосы движения). Таким образом, компонент 105 вычисления вероятности изменяет в соответствии с шириной (32a, 32b) полосы движения вес, применяемый к вероятности смены полосы движения, вычисленной согласно углу θ, который является примером величин состояния, тем самым корректируя вероятность смены полосы движения, вычисленную с использованием угла θ. Другими словами, компонент 105 вычисления вероятности может корректировать, так что относительно того же угла θ вероятность смены полосы движения увеличивается по мере того, как ширина (32b) полосы движения становится уже. Между прочим, приведенное выше объяснение является примером, когда угол θ используется в качестве поведения. Даже когда ориентация второго транспортного средства 12 или направление движения второго транспортного средства 12 используется в качестве поведения, компонент 105 вычисления вероятности изменяет, в соответствии с шириной (32a, 32b) полосы движения аналогично случаю угла θ, вес, применяемый к вероятности смены полосы движения, вычисленной в соответствии с ориентацией второго транспортного средства 12 или направлением движения второго транспортного средства 12.
[0037]
Компонент 105 вычисления вероятности изменяет в соответствии с шириной (32a, 32b) полосы движения вес, применяемый к вероятности смены полосы движения, вычисленной в соответствии с величиной близости (первая величина близости, вторая величина близости), используемой для вычисления вероятности смены полосы движения. Например, в случае ширины (32а) узкой полосы движения второе транспортное средство 12 способно определять смену полосы движения при величине близости меньшей, чем величина для ширины (32b) широкой полосы движения. Кроме того, ширина (32a, 32b) полосы движения становится уже, расстояние в направлении ширины транспортного средства, на которое второе транспортное средство 12 перемещается для выполнения смены полосы движения, становится короче, так что смена полосы движения становится более простой для выполнения. Соответственно, при выполнении определения смены полосы движения определяется, что, по мере того как ширина полосы движения становится уже, второе транспортное средство 12 выполняет смену полосы движения с меньшей первой величиной близости или меньшей второй величиной близости. А именно, компонент 105 вычисления вероятности увеличивает, по мере того как ширина полосы движения становится уже, вес, применяемый к вероятности смены полосы движения, вычисленной в соответствии с величиной близости (первая величина близости, вторая величина близости). Из-за увеличения веса умножение вероятности смены полосы движения, вычисленной с использованием величины состояния (первая величина близости, вторая величина близости), на вес приводит к увеличению первой величины близости и второй величины близости при вычислении вероятности смены полосы движения (увеличение влияние первой величины близости и второй величины близости на вероятность смены полосы движения). Таким образом, изменение веса, применяемого к вероятности смены полосы движения, вычисленной согласно первой величине близости или второй величине близости, реализует коррекцию вероятности смены полосы движения, вычисленной с использованием первой величины близости или второй величины близости.
[0038]
Величина состояния может быть ускорением второго транспортного средства 12 или степенью близости второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a, движущемуся впереди второго транспортного средства 12 в соседней полосе движения (правая полоса G2 движения). «Степень близости» указывает, как показано на фиг. 5A и 5B, расстояние 37 от переднего конца второго транспортного средства 12 до заднего конца первого предшествующего транспортного средства 13a в направлении движения (направлении вдоль полосы движения) или ускорение в направлении приближения к первому предшествующему транспортному средству 13a. Чем выше ускорение или чем короче расстояние 37, т.е. чем выше степень близости, тем выше становится вероятность смены полосы движения. Соответственно, компонент 105 вычислителя вероятности вычисляет более высокую вероятность смены полосы движения, когда ускорение или степень близости второго транспортного средства 12 становится выше. Например, таблица, аналогичная таблице на фиг. 8, может быть подготовлена заранее для ускорения или степени близости второго транспортного средства 12 и сохранена заранее в памяти микрокомпьютера.
[0039]
Чем уже ширина (32a, 32b) полосы движения, тем короче расстояние в направлении ширины транспортного средства, на которое второе транспортное средство 12 движется для выполнения смены полосы движения, т.е. смена полосы движения становится легче. Соответственно, при определении смены полосы движения определяется так, что, по мере того как ширина полосы движения становится уже, второе транспортное средство 12 выполняет смену полосы движения с меньшим ускорением или расстоянием 37. Благодаря этому, компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится уже, вес, применяемый к вероятности смены полосы движения, вычисленной в соответствии с ускорением или расстоянием 37. При этом, по сравнению с тем, когда ширина (32a, 32b) полосы движения является широкой, по мере того как ширина полосы движения становится уже, можно увеличить ускорение или расстояние 37 (увеличить влияние ускорения или расстояния 37 на вероятность смены полосы движения). Соответственно, компонент 105 вычисления вероятности может выполнять коррекцию для того же ускорения или степени близости, чтобы увеличить вероятность смены полосы движения, когда ширина (32a, 32b) полосы движения становится уже. В результате, даже если расстояние 37 одинаково, случай с более узкой полосой движения (фиг. 5A) обеспечивает более высокую вероятность смены полосы движения, чем случай с широкой полосой движения (фиг. 5B).
[0040]
Величина состояния может быть, как показано на фиг. 6A и 6B, расстоянием между транспортными средствами между вторым транспортным средством 12 и собственным транспортным средством 11 (в дальнейшем именуемое «первое расстояние (38a, 38b) между транспортными средствами»). Первое расстояние (38a, 38b) между транспортными средствами - это расстояние по направлению движения от переднего конца собственного транспортного средства 11 до заднего конца второго транспортного средства 12. Естественно, первое расстояние (38a, 38b) между транспортными средствами может быть расстоянием от положения 11g центра тяжести собственного транспортного средства 11 до положения 12g центра тяжести второго транспортного средства 12. В отличие от второй величины близости в таблице на фиг.8, компонент 105 вычисления вероятности вычисляет меньшую вероятность смены полосы движения, когда первое расстояние (38a, 38b) между транспортными средствами становится короче. Например, таблица, аналогичная таблице на фиг. 8, может быть подготовлена заранее для первого расстояния (38a, 38b) между транспортными средствами и сохранена заранее в памяти микрокомпьютера.
[0041]
Чем шире ширина (32a, 32b) полосы движения, тем больше расстояние в направлении ширины транспортного средства, на которое второе транспортное средство 12 перемещается для выполнения смены полосы движения, то есть смена полосы движения становится более трудной. Кроме того, при определении смены полосы движения определяется так, что, по мере того как ширина (32a, 32b) полосы движения становится уже, второе транспортное средство 12 выполняет смену полосы движения при более коротком первом расстоянии (38a, 38b) между транспортными средствами. Для этого компонент 105 вычисления доказуемости увеличивает, по мере того как ширина (32a, 32b) полосы движения становится уже, вес, применяемый к вероятности смены полосы движения, вычисленной согласно первому расстоянию между транспортными средствами. При этом, по сравнению со случаем большой ширины (32a, 32b) полосы движения, по мере того как ширина полосы движения становится уже, можно увеличить первое расстояние между транспортными средствами (увеличить влияние первого расстояния между транспортными средствами на вероятность смены полосы движения). Как результат, компонент 105 вычисления вероятности может корректировать, так что относительно того же первого расстояния между транспортными средствами вероятность смены полосы движения увеличивается, по мере того как ширина (32a, 32b) полосы движения становится уже.
[0042]
Величина состояния может быть, как показано на фиг. 7A-7C, расстоянием между собственным транспортным средством 11 и вторым предшествующим транспортным средством 14, движущимся впереди собственного транспортного средства 11 в собственной полосе движения (левая полоса G1 движения) (далее именуемое «второе расстояние (39a, 39b) между транспортными средствами»). Второе расстояние (39a, 39b) между транспортными средствами - это расстояние по направлению движения от переднего конца собственного транспортного средства 11 до заднего конца второго предшествующего транспортного средства 14. Чем длиннее второе расстояние (39a, 39b) между транспортными средствами, тем шире пространство, позволяющее второму транспортному средству 12 вклиниваться между собственным транспортным средством 11 и вторым предшествующим транспортным средством 14, чтобы сделать выполнение смены полосы движения вторым транспортным средством 12 легче. С другой стороны, чем уже второе расстояние (39a, 39b) между транспортными средствами, тем уже пространство, позволяющее второму транспортному средству 12 вклиниваться между собственным транспортным средством 11 и вторым предшествующим транспортным средством 14, чтобы сделать выполнение смены полосы движения вторым транспортным средством 12 сложнее. Соответственно, компонент 105 вычисления вероятности вычисляет меньшую вероятность смены полосы движения, когда второе расстояние (39a, 39b) между транспортными средствами становится короче. Например, таблица, аналогичная таблице на фиг. 8, также подготавливается заранее для второго расстояния (39a, 39b) между транспортными средствами и сохраняется заранее в памяти микрокомпьютера.
[0043]
Чем шире ширина (32a, 32b) полосы движения, тем больше расстояние в направлении ширины транспортного средства, на которое второе транспортное средство 12 перемещается, чтобы выполнить смену полосы движения, что затрудняет смену полосы движения. Кроме того, при определении смены полосы движения определяется, что, по мере того как ширина (32a, 32b) полосы движения становится уже, второе транспортное средство 12 выполняет смену полосы движения с более коротким вторым расстоянием (39a, 39b) между транспортными средствами. Соответственно, компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится уже, вес, применяемый к вероятности смены полосы движения, вычисленной согласно второму расстоянию (39a, 39b) между транспортными средствами. При этом по сравнению со случаем большой ширины (32a, 32b) полосы движения второе расстояние (39a, 39b) между транспортными средствами увеличивается, по мере того как ширина полосы движения становится уже. В результате компонент 105 вычисления вероятности может корректировать, так что относительно того же самого второго расстояния между транспортными средствами вероятность смены полосы движения увеличивается, по мере того как ширина (32a, 32b) полосы движения становится уже.
[0044]
Величина состояния может быть, как показано на фиг. 5A и 5C, разницей между размером второго транспортного средства 12 и размером первого предшествующего транспортного средства (13a, 13b), движущегося впереди второго транспортного средства 12 в соседней полосе движения (правая полоса G2 движения). «Размер» транспортного средства - это понятие, включающее в себя высоту и ширину транспортного средства. Например, как проиллюстрировано на фиг. 5C, когда первое предшествующее транспортное средство 13b больше, чем второе транспортное средство 12, передний мертвый угол в направлении движения второго транспортного средства 12, образованный первым предшествующим транспортным средством 13b, шире, чем угол по фиг. 5А. Это мешает второму транспортному средству 12 воспринимать ситуацию впереди в направлении движения, тем самым снижая вероятность смены полосы движения. Соответственно, компонент 105 вычисления вероятности вычисляет меньшую вероятность смены полосы движения, по мере того как значение, например, полученное путем вычитания высоты транспортного средства для второго транспортного средства 12 из высоты транспортного средства для первого предшествующего транспортного средства 13b (разница высот транспортных средств), становится больше. Например, таблица, аналогичная таблице на фиг. 8, также подготовлена заранее для высоты транспортного средства и заранее сохранена в памяти микрокомпьютера.
[0045]
Чем уже ширина (32a, 32b) полосы движения, тем труднее второе транспортное средство 12 воспринимает ситуацию впереди в направлении движения соседней полосы движения (правая полоса G2 движения), что затрудняет выполнение смены полосы движения. Соответственно, при выполнении определения смены полосы движения определяется так, что, по мере того как ширина (32a, 32b) полосы движения становится уже, второе транспортное средство 12 выполняет смену полосы движения при меньшей разнице высот транспортных средств. Соответственно, компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится уже, вес, применяемый к вероятности смены полосы движения, вычисленной согласно разнице между размером второго транспортного средства 12 и размером первого предшествующего транспортного средства (13а, 13b). При этом, по сравнению с тем, когда ширина (32a, 32b) полосы движения является широкой, по мере того как ширина полосы движения становится уже, можно увеличивать разницу высот транспортных средств (увеличивать влияние разницы высот транспортных средств на вероятность смены полосы движения). В результате компонент 105 вычисления вероятности может корректировать, так что относительно той же самой разницы высот транспортных средств вероятность смены полосы движения уменьшается, по мере того как ширина (32a, 32b) полосы движения становится уже. Между тем, компонент 105 вычисления вероятности может увеличивать вес, применяемый к разнице высот транспортных средств (пример величин состояния), когда ширина (32a, 32b) полосы движения становится уже.
[0046]
Величина состояния может быть относительной скоростью второго транспортного средства 12 по отношению к собственному транспортному средству 11. Чем больше относительная скорость, тем легче второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, чем меньше относительная скорость, тем труднее второе транспортное средство 12 выполняет смену полосы движения. Благодаря этому компонент 105 вычисления вероятности вычисляет, по мере того как относительная скорость становится меньше, меньшую вероятность смены полосы движения. Например, таблица, аналогичная таблице на фиг. 8, также подготовлена заранее для относительной скорости и сохраняется заранее в памяти микрокомпьютера.
[0047]
Чем шире ширина (32a, 32b) полосы движения, тем больше расстояние в направлении ширины транспортного средства, на которое второе транспортное средство 12 перемещается для выполнения смены полосы движения, что затрудняет выполнение смены полосы движения. Вследствие этого при определении смены полосы движения определяется так, что, по мере того как ширина (32a, 32b) полосы движения становится шире, второе транспортное средство 12 выполняет смену полосы движения при более высокой относительной скорости второго транспортного средства 12 по отношению к собственному транспортному средству. Для этого компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится шире, вес, применяемый к относительной скорости. При этом, по сравнению с тем, когда ширина (32a, 32b) полосы движения является узкой, по мере того как ширина полосы движения становится шире, можно увеличивать относительную скорость (увеличивать влияние относительной скорости на вероятность смены полосы движения). В результате компонент 105 вычисления вероятности может корректировать так, что относительно той же самой относительной скорости вероятность смены полосы движения уменьшается, по мере того как ширина (32a, 32b) полосы движения становится шире.
[0048]
Компонент 105 вычисления вероятности может вычислять вероятность смены полосы движения согласно множеству величин состояния (x, θ) и весов (α, β), применяемых к вероятностям смены полосы движения (ρ(x), ρ(θ)), вычисленным согласно к величинам состояния (x, θ). А именно, компонент 105 вычисления вероятности вычисляет для множества величин состояния (x, θ) вероятности смены полосы движения (ρ(x), ρ(θ)), соответственно, и в соответствии с шириной (32a, 32b) полосы движения регулирует веса (α, β), применяемые к соответствующим величинам состояния (x, θ). После этого можно объединить множество скорректированных вероятностей смены полосы движения (α⋅ρ(x), β⋅ρ(θ)) и, наконец, вычислить одну вероятность смены полосы движения (P). Например, согласно выражению (1), можно вычислить одну скорректированную вероятность смены полосы движения (P) из множества скорректированных вероятностей смены полосы движения (α⋅ρ(x), β⋅ρ(θ)). В выражении (1) N - это количество скорректированных вероятностей смены полосы движения или сумма весов. Кроме того, L представляет собой вероятность смены полосы движения согласно величине состояния, например, вышеупомянутому ускорению, расстоянию между транспортными средствами, второму размеру транспортного средства или относительной скорости, отличной от (x, θ). Кстати, в связи с вероятностью смены полосы движения L ее можно скорректировать, как и вероятности смены полосы движения (ρ(x), ρ(θ)), умножив ее на вес (весовой коэффициент), установленный в соответствии с шириной полосы движения. Кроме того, θ в приведенном ниже выражении (1) означает, как упомянуто выше, угол, образованный направлением движения второго транспортного средства 12 и направлением полосы движения правой полосы G2 движения, а x означает упомянутую выше первую величину близости или вторую величину близости.
[0049]
[Выражение 1]

[0050]
(О компоненте 108 определения предсказания движения)
Компонент 108 определения предсказания движения использует вероятность смены полосы движения и предварительно установленное пороговое значение и определяет, выполняет ли второе транспортное средство смену полосы движения. Компонент 108 определения предсказания движения корректирует пороговое значение в соответствии с шириной (32a, 32b) полосы движения для соседней полосы движения (правая полоса G2 движения).
[0051]
Точнее, компонент 108 определения предсказания движения определяет согласно нижеперечисленным трем способам (с первого по третий способы), выполняет ли второе транспортное средство 12 смену полосы движения. Альтернативно можно выбрать три способа.
[0052]
В качестве первого способа компонент 108 определения предсказания движения может сравнивать вероятность смены полосы движения, скорректированную компонентом 105 вычисления вероятности (называемую «вероятностью смены полосы движения после коррекции»), с пороговым значением до коррекции. «Пороговое значение до коррекции» - это пороговое значение перед корректировкой компонентом 108 определения предсказания движения. Компонент 108 определения предсказания движения определяет, что, если вероятность смены полосы движения после коррекции больше, чем пороговое значение до коррекции, второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, компонент 108 определения предсказания движения определяет, что, если вероятность смены полосы движения после коррекции равна или меньше порогового значения до коррекции, второе транспортное средство 12 не выполняет смену полосы движения. Когда выбран первый способ, компонент 108 определения предсказания движения не требуется для корректировки порогового значения в соответствии с шириной (32a, 32b) полосы движения для соседней полосы движения (правая полоса G2 движения).
[0053]
В качестве второго способа компонент 108 определения предсказания движения может сравнивать вероятность смены полосы движения, вычисленную компонентом 105 вычисления вероятности, с пороговым значением, скорректированным компонентом 108 определения предсказания движения (называемым «пороговым значением после коррекции»). Вероятность смены полосы движения, вычисленная компонентом 105 вычисления вероятности, является вероятностью смены полосы движения до коррекции компонентом 105 вычисления вероятности (называемой «вероятностью смены полосы движения до коррекции»). Компонент 108 определения предсказания движения определяет, что, если вероятность смены полосы движения до коррекции больше, чем пороговое значение после коррекции, второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, компонент 108 определения предсказания движения определяет, что, если вероятность смены полосы движения до коррекции равна или меньше порогового значения после коррекции, второе транспортное средство 12 не выполняет смену полосы движения. Когда выбран второй способ, компонент 105 вычисления вероятности не требуется для корректировки вероятности смены полосы движения в соответствии с шириной (32a, 32b) полосы движения для соседней полосы движения (правая полоса G2 движения).
[0054]
В качестве третьего способа компонент 108 определения предсказания движения может сравнивать вероятность смены полосы движения после коррекции с пороговым значением после коррекции. Компонент 108 определения предсказания движения определяет, что, если вероятность смены полосы движения после коррекции больше, чем пороговое значение после коррекции, второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, компонент 108 определения предсказания движения определяет, что, если вероятность смены полосы движения после коррекции равна или меньше порогового значения после коррекции, второе транспортное средство 12 не выполняет смену полосы движения.
[0055]
Таким образом, компонент 108 определения предсказания движения сравнивает одно из вероятности смены полосы движения и порогового значения, скорректированных в соответствии с шириной (32a, 32b) полосы движения, с другим из вероятности смены полосы движения и порогового значения, не скорректированных в соответствии с шириной (32а, 32b) полосы движения. В качестве альтернативы, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения и пороговое значение, оба скорректированные в соответствии с шириной (32a, 32b) полосы движения, друг с другом. Компонент 108 определения предсказания движения определяет, согласно любому из этих результатов сравнения, выполняет ли второе транспортное средство 12 смену полосы движения.
[0056]
Будет объяснена коррекция порогового значения в соответствии с шириной (32a, 32b) полосы движения. Компонент 108 определения предсказания движения заранее устанавливает одно или множество пороговых значений для каждой ширины (32a, 32b) полосы движения. Например, для каждой из ширины 32a узкой полосы движения и ширины 32b широкой полосы движения устанавливается одно или множество пороговых значений. Кстати, установленные пороговые значения хранятся в памяти микрокомпьютера. Компонент 108 определения предсказания движения выбирает одно или множество пороговых значений, соответствующих ширине полосы движения, полученной компонентом 104 получения структуры полосы движения. Таким образом, компонент 108 определения предсказания движения заранее устанавливает различные пороговые значения для ширины полосы движения, соответственно, и выбирает из числа пороговых значений пороговое значение, соответствующее фактической ширине полосы движения, тем самым достигая коррекции порогового значения. Компонент 108 определения предсказания движения сравнивает выбранное пороговое значение (пример порогового значения после коррекции) с вероятностью смены полосы движения и предсказывает смену полосы движения для второго транспортного средства 12.
[0057]
«Установка множества пороговых значений» предназначена для установки пороговых значений для величин состояния, соответственно, используемых для вычисления вероятности смены полосы движения. Например, как объяснено со ссылкой на выражение (1), в случае использования множества величин состояния (x, θ, ...) для вычисления вероятности смены полосы движения пороговые значения устанавливаются для величин состояния (x, θ, ...) соответственно. Компонент 108 определения предсказания движения сравнивает для каждой из величин состояния (x, θ, ...) выбранное пороговое значение с вероятностью смены полосы движения (ρ(x), ρ(θ), ...) и определяет, выполняет ли второе транспортное средство 12 смену полосы движения.
[0058]
«Установка множества пороговых значений» предназначена для установки, для многоэтапного управления первым расстоянием (38a, 38b) между транспортными средствами или скоростью собственного транспортного средства 11, множества пороговых значений для величины состояния, используемой для вычисления вероятности смены полосы движения, или вероятности смены полосы движения. Точнее, множество пороговых значений заранее подготавливается многоступенчатым образом. Затем множество пороговых значений сравнивается с вероятностью смены полосы движения, чтобы определить многоступенчатым образом, выполняет ли второе транспортное средство 12 смену полосы движения. Это реализует многоступенчатое управление собственным транспортным средством 11 для обеспечения безопасности при смене полосы движения второго транспортного средства 12.
[0059]
При корректировке порогового значения в соответствии с шириной (32a, 32b) полосы движения компонент 105 вычисления вероятности может предположить, что второе транспортное средство 12 расположено на линии 31 границы полосы движения, и вычислить вероятность смены полосы движения. Положение второго транспортного средства 12, которое является примером величины состояния, используемой для вычисления вероятности смены полосы движения, должно быть положением на линии 31 границы полосы движения. Принимая во внимание положение второго транспортного средства 12, можно стабилизировать вычисление вероятности смены полосы движения или определение смены полосы движения.
[0060]
Компонент 109 формирования траектории собственного транспортного средства формирует траекторию собственного транспортного средства 11 в соответствии с движением (включая смену полосы движения) второго транспортного средства 12, предсказанным компонентом 108 определения предсказания движения. Если смена полосы движения второго транспортного средства 12 на собственную полосу G1 движения была предсказана, можно сформировать траекторию на основе предсказания смены полосы движения второго транспортного средства 12. Соответственно, можно сформировать плавную траекторию для собственного транспортного средства 11, которая обеспечивает достаточное расстояние между транспортными средствами от второго транспортного средства 12 и препятствует движению второго транспортного средства 12 вызывать быстрое замедление или быстрое руление собственного транспортного средства 11. «Траектория собственного транспортного средства» указывает не только профиль положения собственного транспортного средства 11 в разное время, но также профиль скорости собственного транспортного средства 11 в соответствующих положениях. Компонент 109 формирования траектории собственного транспортного средства формирует траекторию собственного транспортного средства 11, соответствующую смене полосы движения. Кроме того, можно сформировать траекторию собственного транспортного средства 11 для увеличения относительного расстояния второго транспортного средства 12 по отношению к собственному транспортному средству 11. Кроме того, если перед собственным транспортным средством 11 сформирован ряд транспортных средств, компонент 109 формирования траектории собственного транспортного средства может вычислить траекторию собственного транспортного средства 11, которая заставляет собственное транспортное средство 11 замедляться, чтобы сформировать пространство между транспортными средствами, так что второе транспортное средство 12 может вклиниться в ряд транспортных средств. Это приводит к более безопасному управлению собственным транспортным средством 11.
[0061]
Компонент 110 управления транспортным средством приводит в действие по меньшей мере одно из рулевого исполнительного механизма, исполнительного механизма педали ускорения и исполнительного механизма педали тормоза в соответствии с собственным положением, вычисленным компонентом 101 оценки положения собственного транспортного средства, так что собственное транспортное средство 11 может двигаться по траектории, формируемой компонентом 109 формирования траектории собственного транспортного средства. Между прочим, первый вариант осуществления описывает пример управления, которое управляет собственным транспортным средством 11 вдоль траектории. Вместо этого можно управлять собственным транспортным средством 11 без формирования траектории собственного транспортного средства 11. В этом случае можно достичь управления в соответствии с относительным расстоянием по отношению ко второму транспортному средству 12 или разницей углов ориентации между вторым транспортным средством 12 и собственным транспортным средством 11. Если то, выполняет ли второе транспортное средство 12 смену полосы движения, определяется многоступенчатым образом, компонент 110 управления транспортным средством может выполнять многоступенчатое управление транспортным средством для собственного транспортного средства 11 для обеспечения безопасности в отношении смены полосы движения второго транспортного средства 12. В качестве альтернативы само значение вероятности смены полосы движения может использоваться для управления расстоянием между транспортными средствами между собственным транспортным средством 11 и вторым транспортным средством 12 и скоростью транспортного средства для собственного транспортного средства 11.
[0062]
Со ссылкой на фиг. 2 в качестве способа предсказания движения другого транспортного средства согласно первому варианту осуществления будет объяснен пример работы устройства предсказания движения другого транспортного средства по фиг. 1. Фиг. 2 многократно выполняется с заранее заданными интервалами с момента включения выключателя зажигания собственного транспортного средства 11 (в случае электромобиля источник питания включен) до момента его выключения. Кроме того, поток управления на фиг. 2 основан на предположении, что собственное транспортное средство 11 управляется посредством автоматического вождения.
[0063]
Сначала на этапе S201 компонент 101 оценки положения собственного транспортного средства измеряет собственное положение (абсолютное положение и относительное положение) собственного транспортного средства 11. После этого определяется положение и ориентация собственного транспортного средства 11 на карте. Переходя к этапу S202, компонент 102 обнаружения объектов получает поведение второго транспортного средства 12. Точнее, компонент 102 обнаружения объектов использует датчик обнаружения объектов для обнаружения второго транспортного средства 12 и отслеживает второе транспортное средство 12. В качестве результата обнаружения, например, выводится поведение второго транспортного средства 12 на виде сверху, если смотреть с воздуха над собственным транспортным средством 11.
[0064]
Переходя к этапу S203, компонент 104 получения структуры полосы движения получает информацию, указывающую структуру дороги вокруг собственного транспортного средства 11 и структуру каждой полосы движения (G1, G2), образующей дорогу. На дороге вокруг собственного транспортного средства 11 получается по меньшей мере информация, указывающая структуру соседней полосы движения (правая полоса G2 движения), по которой движется второе транспортное средство 12, то есть объект определения смены полосы движения. Структура соседней полосы движения (правая полоса G2 движения) включает ширину полосы движения для соседней полосы движения (правая полоса G2 движения). Из картографических данных или анализа изображения вокруг собственного транспортного средства 11 можно получить информацию, указывающую структуру дороги и структуру полосы движения. Переходя к этапу S204, компонент 103 формирования вариантов движения предсказывает, в соответствии со структурой дороги и структурой полосы движения, варианты движения, которые должны быть выполнены в ближайшем будущем вторым транспортным средством 12. Варианты движения включают смену полосы движения.
[0065]
Переходя к этапу S205, устройство предсказания движения другого транспортного средства определяет, включена ли смена полосы движения в варианты предсказываемого движения. Если есть смена полосы движения (ДА на этапе S205), он переходит к этапу S206. С другой стороны, если нет смены полосы движения (НЕТ на S205), он переходит к этапу S213, на котором компонент 110 управления транспортным средством выполняет обычное управление транспортным средством без использования результата определения устройством предсказания движения другого транспортного средства.
[0066]
На этапе S206 устройство предсказания движения другого транспортного средства определяет в соответствии с выбранным пользователем состоянием в связи с коррекцией вероятности смены полосы движения, должна ли корректироваться вероятность смены полосы движения. Если пользователь выбрал корректировку вероятности смены полосы движения в соответствии с шириной (32a, 32b) полосы движения (ДА на этапе S206), он переходит к этапу S207. С другой стороны, если пользователь выбрал не корректировать вероятность смены полосы движения в соответствии с шириной (32a, 32b) полосы движения (НЕТ на S206), он переходит к этапу S208.
[0067]
На этапе S208 компонент 105 вычисления вероятности вычисляет вероятность смены полосы движения согласно величине состояния. Величина состояния представляет собой одно или комбинацию двух или более из ориентации второго транспортного средства 12, направления его движения, его угла θ, первой величины близости, второй величины близости, ускорения второго транспортного средства 12, степени близости второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a, первого расстояния (38a, 38b) между транспортными средствами, второго расстояния (39a, 39b) между транспортными средствами, размера второго транспортного средства 12 или первого предшествующего транспортного средства (13a, 13b), и относительной скорости второго транспортного средства 12 по отношению к собственному транспортному средству 11. После этого он переходит к этапу S210.
[0068]
На этапе S207 компонент 105 вычисления вероятности вычисляет, аналогично этапу S208, вероятность смены полосы движения согласно величине состояния. Кроме того, компонент 105 вычисления вероятности корректирует вероятность смены полосы движения в соответствии с шириной (32a, 32b) полосы движения для соседней полосы движения (правая полоса G2 движения). Точнее, компонент 105 вычисления вероятности изменяет в соответствии с шириной (32a, 32b) полосы движения вес, применяемый к величине состояния, используемой для вычисления вероятности смены полосы движения, тем самым корректируя вероятность смены полосы движения. После этого он переходит к этапу S209.
[0069]
На этапе S209 устройство предсказания движения другого транспортного средства определяет в соответствии с выбранным пользователем состоянием, касающимся коррекции порогового значения, необходимо ли корректировать пороговое значение. Если корректировка порогового значения в соответствии с шириной (32a, 32b) полосы движения была выбрана пользователем (ДА на S209), он переходит к этапу S210. С другой стороны, если пользователь не выбрал корректировку порогового значения в соответствии с шириной (32a, 32b) полосы движения (НЕТ на S209), он переходит к этапу S211.
[0070]
На этапе S211 компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения, скорректированную на этапе S207 (вероятность смены полосы движения после коррекции), с пороговым значением до коррекции. Если вероятность смены полосы движения после коррекции больше, чем пороговое значение до коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, если вероятность смены полосы движения после коррекции равна или меньше порогового значения до коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 не выполняет смену полосы движения. После этого он переходит к этапу S212.
[0071]
На этапе S210 компонент 108 определения предсказания движения сначала корректирует пороговое значение в соответствии с шириной (32a, 32b) полосы движения для соседней полосы движения (правая полоса G2 движения). Затем, если этап S208 был пройден, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения, вычисленную на этапе S208 (вероятность смены полосы движения до коррекции), со скорректированным пороговым значением (пороговое значение после коррекции). Если вероятность смены полосы движения до коррекции больше, чем пороговое значение после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, если вероятность смены полосы движения до коррекции равна или меньше порогового значения после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 не выполняет смену полосы движения.
[0072]
С другой стороны, если этап S207 был пройден, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения, скорректированную на этапе S207 (вероятность смены полосы движения после коррекции), с пороговым значением после коррекции. Если вероятность смены полосы движения после коррекции больше, чем пороговое значение после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, если вероятность смены полосы движения после коррекции равна или меньше порогового значения после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 не выполняет смену полосы движения. После этого он переходит к этапу S212.
[0073]
На этапе S212 компонент 109 формирования траектории собственного транспортного средства формирует траекторию собственного транспортного средства 11 согласно движению второго транспортного средства 12, предсказанному на этапе S210 или S211. Если смена полосы движения второго транспортного средства 12 на собственную полосу G1 движения была предсказана, траектория формируется на основе предсказания смены полосы движения для второго транспортного средства 12. Как траекторию собственного транспортного средства 11, компонент 109 формирования траектории собственного транспортного средства определяет относительное расстояние второго транспортного средства 12 по отношению к собственному транспортному средству 11 и определяет геометрическое место и скорость транспортного средства для собственного транспортного средства 11, которые необходимы для поддержания относительного расстояния.
[0074]
Переходя к этапу S213, компонент 110 управления транспортным средством приводит в действие различные виды исполнительных механизмов в соответствии с собственным положением, вычисленным компонентом 101 оценки положения собственного транспортного средства, так что собственное транспортное средство 11 может двигаться по траектории, сформированной на этапе S212. Компонент 110 управления транспортным средством может управлять собственным транспортным средством 11, не формируя траекторию собственного транспортного средства 11.
[0075]
Как объяснено выше, согласно первому варианту осуществления достигаются нижеперечисленные функции и эффекты.
[0076]
Как показано на фиг. 4A и 4B, в реальных условиях транспортное средство проезжает через места с разной шириной дороги и шириной полосы движения. Если ширина полосы движения отличается, движение второго транспортного средства 12, выполняющего смену полосы движения, будет другим. Благодаря этому устройство предсказания движения другого транспортного средства корректирует в соответствии с шириной (32a, 32b) полосы движения по меньшей мере одно из вероятности смены полосы движения и порогового значения. Компонент 108 определения предсказания движения сравнивает одно из вероятности смены полосы движения и порогового значения, скорректированных в соответствии с шириной полосы движения, с другим из вероятности смены полосы движения и порогового значения, не скорректированных согласно ширине полосы движения. В качестве альтернативы, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения и пороговое значение, оба скорректированные в соответствии с шириной полосы движения, друг с другом. Согласно любому из результатов сравнения, компонент 108 определения предсказания движения определяет, выполняет ли второе транспортное средство 12 смену полосы движения. Предсказание смены полосы движения с учетом ширины (32a, 32b) полосы движения для соседней полосы G2 движения позволяет подавить ошибочное предсказание смены полосы движения или задержку предсказания. Кроме того, оно подавляет замедление собственного транспортного средства 11 из-за ошибочного предсказания или внезапного замедления собственного транспортного средства 11 из-за задержки предсказания.
[0077]
Компонент 105 вычисления вероятности изменяет в соответствии с шириной полосы движения вес, применяемый к вероятности смены полосы движения, вычисленной согласно величине состояния, тем самым корректируя вероятность смены полосы движения согласно ширине полосы движения. Даже на дорогах с разной шириной полосы движения можно вычислить вероятность смены полосы движения без учета влияния ширины полосы движения.
[0078]
Величина состояния может быть положением второго транспортного средства 12, первой величиной близости, то есть величиной приближения второго транспортного средства 12 к собственному транспортному средству 11, или второй величиной близости, то есть величиной приближения второго транспортного средства 12 к линии 31 границы полосы движения. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина полосы движения становится шире, вес, применяемый к положению второго транспортного средства 12, первой величине близости и второй величине близости. По мере того как ширина полосы движения становится шире, можно при определении смены полосы движения придавать важность положению второго транспортного средства 12, первой величине близости и второй величине близости. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0079]
Величина состояния может быть ориентацией второго транспортного средства 12, направлением движения второго транспортного средства 12 или углом θ, образованным направлением движения второго транспортного средства 12 и направлением полосы движения для правой полосы G2 движения. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина полосы движения становится уже, вес, применяемый к ориентации, направлению движения или углу θ. По мере того как ширина полосы движения становится уже, при определении смены полосы движения можно придавать важность ориентации, направлению движения или углу θ. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0080]
Величина состояния может быть ускорением второго транспортного средства 12 или степенью близости второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится уже, вес, применяемый к ускорению или степени близости. По мере того как ширина полосы движения становится уже, при определении смены полосы движения можно придавать важность ускорению или степени близости. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0081]
Величина состояния может быть, как показано на фиг. 6A и 6B, первым расстоянием (38a, 38b) между транспортными средствами. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится шире, вес, применяемый к первому расстоянию между транспортными средствами. По мере того как ширина полосы движения становится шире, можно при определении смены полосы движения придавать важность первому расстоянию между транспортными средствами. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0082]
Величина состояния может быть, как показано на фиг. 7A-7C, вторым расстоянием (39a, 39b) между транспортными средствами. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится шире, вес, применяемый ко второму расстоянию между транспортными средствами. По мере того как ширина полосы движения становится шире, можно при определении смены полосы движения придавать важность второму расстоянию между транспортными средствами. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0083]
Величина состояния может быть, как показано на фиг. 5A и 5C, размером второго транспортного средства 12, размером первого предшествующего транспортного средства (13a, 13b) или разницей высот транспортных средств. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится уже, вес, применяемый к размеру второго транспортного средства 12, размеру первого предшествующего транспортного средства (13a, 13b) или разнице высот транспортных средств. По мере того как ширина полосы движения становится уже, можно при определении смены полосы движения придавать важность размеру второго транспортного средства 12, размеру первого предшествующего транспортного средства (13a, 13b) или разнице высот транспортных средств. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0084]
Величина состояния может быть относительной скоростью второго транспортного средства 12 по отношению к собственному транспортному средству 11. Компонент 105 вычисления вероятности увеличивает, по мере того как ширина (32a, 32b) полосы движения становится шире, вес, применяемый к относительной скорости. По мере того как ширина полосы движения становится шире, при определении смены полосы движения можно придавать важность относительной скорости. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0085]
Компонент 105 вычисления вероятности вычисляет в соответствии с величинами состояния (x, θ) и весами (α, β), примененными к величинам состояния, соответственно, соответствующие вероятности смены полосы движения (ρ(x), ρ(θ)). Веса (α, β), применяемые к вышеупомянутым величинам состояния, регулируются в соответствии с шириной полосы движения, и вычисляется множество вероятностей смены полосы движения после коррекции (α⋅ρ(x), β⋅ρ(θ)). Множество вероятностей смены полосы движения после коррекции используется с выражением (1) для вычисления одной вероятности смены полосы движения после коррекции (P). Благодаря этому повышается точность вычисления вероятности смены полосы движения.
[0086]
Компонент 108 определения предсказания движения устанавливает для каждой ширины полосы движения одно или множество пороговых значений и выбирает одно или множество пороговых значений, соответствующих ширине полосы движения, указанной посредством информации, полученной компонентом 104 получения структуры полосы движения. Компонент 108 определения предсказания движения сравнивает выбранное пороговое значение (пример порогового значения после коррекции) с вероятностью смены полосы движения и предсказывает смену полосы движения, которая должна быть выполнена вторым транспортным средством 12. Без влияния ширины полосы движения смену полосы движения можно правильно предсказать.
[0087]
«Установить множество пороговых значений» означает установить пороговые значения для величин состояния, соответственно, используемых для вычисления вероятности смены полосы движения. Компонент 108 определения предсказания движения сравнивает для каждой из величин состояния (x, θ, ...) выбранное пороговое значение с вероятностью смены полосы движения (ρ(x), ρ(θ), ...), тем самым определяя, выполняет ли второе транспортное средство 12 смену полосы движения. Без влияния ширины полосы движения смену полосы движения можно правильно предсказать.
[0088]
«Установить множество пороговых значений» означает, для многоступенчатого управления первым расстоянием (38a, 38b) между транспортными средствами или скоростью собственного транспортного средства 11, установку множества пороговых значений для величины состояния, используемой для вычисления вероятности смены полосы движения, или вероятности смены полосы движения. Без влияния ширины полосы движения можно реализовать многоступенчатое управление транспортным средством собственного транспортного средства 11 для обеспечения безопасности в отношении смены полосы движения второго транспортного средства 12.
[0089]
При корректировке порогового значения в соответствии с шириной (32a, 32b) полосы движения компонент 105 вычисления вероятности может вычислить вероятность смены полосы движения, исходя из предположения, что второе транспортное средство 12 расположено на линии 31 границы полосы движения. Без влияния ширины полосы движения вероятность смены полосы движения может быть правильно вычислена.
[0090]
(Второй вариант осуществления)
Устройство предсказания движения другого транспортного средства и способ предсказания движения другого транспортного средства согласно второму варианту осуществления отличаются от первого варианта осуществления тем, что они корректируют по меньшей мере одно из вероятности смены полосы движения и порогового значения в соответствии с положением второго транспортного средства в соседней полосе G2 движения вместо ширины (32a, 32b) полосы движения для соседней полосы G2 движения. Как показано на фиг. 4A и 4B, предполагается, что транспортные средства (11, 12) обычно движутся по центру в направлении ширины полосы движения соответствующих полос движения (G1, G2). Соответственно, если ширина (32a, 32b) полосы движения изменяется, положение второго транспортного средства 12 по отношению к собственному транспортному средству 11 или линии 31 границы полосы движения соответственно изменяется. Например, если ширина (32a, 32b) полосы движения изменяется, расстояние в направлении ширины полосы движения от собственного транспортного средства 11 или линии 31 границы полосы движения до второго транспортного средства 12, то есть относительное положение второго транспортного средства 12 по отношению к собственному транспортному средству 11 или линии 31 границы полосы движения соответственно изменяется. Из-за этого вместо ширины (32a, 32b) полосы движения для соседней полосы G2 движения, положение в направлении ширины полосы движения второго транспортного средства 12 по отношению к собственному транспортному средству 11 или линии 31 границы полосы движения используется для корректировки по меньшей мере одной из вероятности смены полосы движения или порогового значения, тем самым обеспечивая функции и эффекты, аналогичные таковым в первом варианте осуществления.
[0091]
Подобно первому варианту осуществления, устройство предсказания движения другого транспортного средства и способ предсказания движения другого транспортного средства согласно второму варианту осуществления эффективно функционируют, например, в сценах движения, показанных на фиг. 4A и 4B. Между прочим, сцены движения, такие как показанные на фиг. 4A и 4B, являются примерами сцен движения, в которых эффективно функционируют способ предсказания движения другого транспортного средства и устройство предсказания движения другого транспортного средства согласно второму варианту осуществления, и не предназначены для ограничения области применения способа предсказания движения другого транспортного средства и устройства предсказания движения другого транспортного средства согласно второму варианту осуществления.
[0092]
Второй вариант осуществления вычисляет вероятность смены полосы движения согласно величине состояния второго транспортного средства 12 и использует вероятность смены полосы движения и пороговое значение для предсказания смены полосы движения, которая должна быть выполнена вторым транспортным средством 12. Другими словами, он использует вероятность смены полосы движения и пороговое значение, чтобы определить, выполняет ли второе транспортное средство 12 смену полосы движения.
[0093]
Как показано на фиг. 4A и 4B, если положение второго транспортного средства 12 по отношению к собственному транспортному средству 11 или линии 31 границы полосы движения отличается, разница будет возникать в величине состояния второго транспортного средства 12 при выполнении изменения курса. Например, при изменении курса величины состояния, такие как ориентация (угол рыскания по отношению к линии 31 границы полосы движения), направление движения, расстояние движения в направлении ширины полосы движения (величина приближения) и геометрическое место движения второго транспортного средства 12 изменяются в соответствии с положением второго транспортного средства 12. Благодаря этому второй вариант осуществления получает положение в направлении ширины полосы движения второго транспортного средства 12 по отношению к собственному транспортному средству 11 или положение второго транспортного средства 12 относительно линии 31 границы полосы движения и, в соответствии с положением второго транспортного средства 12, корректирует по меньшей мере одно из вероятности смены полосы движения и порогового значения. После этого второй вариант осуществления сравнивает вероятность смены полосы движения после коррекции с пороговым значением до коррекции, или сравнивает вероятность смены полосы движения до коррекции с пороговым значением после коррекции, или сравнивает вероятность смены полосы движения после коррекции с пороговым значением после коррекции, тем самым предсказывая смену полосы движения, которая должна выполняться вторым транспортным средством 12. Предсказание смены полосы движения с учетом положения второго транспортного средства 12 может подавлять ошибочное предсказание смены полосы движения или задержку предсказания.
[0094]
Конфигурация устройства предсказания движения другого транспортного средства согласно второму варианту осуществления отличается от конфигурации устройства предсказания движения другого транспортного средства первого варианта осуществления в нижеперечисленных пунктах.
[0095]
Компонент 105 вычисления вероятности корректирует вероятность смены полосы движения в соответствии с положением второго транспортного средства 12 (т.е. расстоянием в направлении ширины полосы движения от собственного транспортного средства 11 или линии 31 границы полосы движения до второго транспортного средства 12). Например, компонент 105 вычисления вероятности изменяет вес, применяемый к величине состояния, используемой для вычисления вероятности смены полосы движения, в соответствии с расстоянием (33a, 33b, 34a, 34b) в направлении ширины полосы движения от собственного транспортного средства 11 или линии 31 границы полосы движения до второго транспортного средства 12. Например, если расстояние (33a, 34a) небольшое, предполагается, что второе транспортное средство 12 выполняет смену полосы движения под углом θ (состояние) меньшим, чем при большом расстоянии (33b, 34b). Кроме того, при определении смены полосы движения предпочтительно придавать важность углу θ, по мере того как расстояние (33a, 33b, 34a, 34b) становится меньше. Вследствие этого компонент 105 вычисления вероятности увеличивает вес, применяемый к углу θ, когда расстояние (33a, 33b, 34a, 34b) становится короче. Другими словами, чем ближе положение второго транспортного средства 12 к собственному транспортному средству 11 или линии 31 границы полосы движения, тем больше увеличивается вес, приложенный к углу θ. Компонент 105 вычисления вероятности может изменять, аналогично случаю угла θ, вес, применяемый к ориентации второго транспортного средства 12 или направлению движения второго транспортного средства 12 в соответствии с положением второго транспортного средства 12.
[0096]
Для любой другой величины состояния компонент 105 вычисления вероятности регулирует вес, применяемый к величине состояния, в соответствии с положением второго транспортного средства 12 вместо ширины (32a, 32b) полосы движения.
[0097]
Величина состояния может быть ускорением второго транспортного средства 12 или степенью близости второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a, движущемуся впереди второго транспортного средства 12 по соседней полосе движения (правая полоса G2 движения). Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится ближе к собственному транспортному средству 11 или линии 31 границы полосы движения, вес, применяемый к ускорению или степени близости.
[0098]
Величина состояния может быть, как показано на фиг. 6A и 6B, первым расстоянием (38a, 38b) между транспортными средствами. Компонент 105 вычисления вероятности увеличивает вес, применяемый к первому расстоянию между транспортными средствами, по мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения.
[0099]
Величина состояния может быть, как показано на фиг. 7A-7C, вторым расстоянием (39a, 39b) между транспортными средствами. Компонент 105 вычисления вероятности увеличивает вес, применяемый ко второму расстоянию (39a, 39b) между транспортными средствами, по мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения.
[0100]
Величина состояния может быть, как показано на фиг. 5A и 5C, размером второго транспортного средства 12 и размером первого предшествующего транспортного средства (13a, 13b). Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится ближе к собственному транспортному средству 11 или линии 31 границы полосы движения, вес, применяемый к размеру второго транспортного средства 12 и размеру первого предшествующего транспортного средства (13a, 13b).
[0101]
Величина состояния может быть относительной скоростью второго транспортного средства 12 по отношению к собственному транспортному средству 11. Компонент 105 вычисления вероятности увеличивает вес, применяемый к относительной скорости, по мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения.
[0102]
Компонент 105 вычисления вероятности может вычислять одну вероятность (P) смены полосы движения в соответствии с величинами (x, θ) состояния и весами (α, β), примененными к величинам (x, θ) состояния.
[0103]
Компонент 108 определения предсказания движения корректирует пороговое значение в соответствии с положением второго транспортного средства 12. Например, компонент 108 определения предсказания движения корректирует пороговое значение в соответствии с расстоянием (33a, 33b, 34a, 34b) в направлении ширины полосы движения от собственного транспортного средства 11 или линии 31 границы полосы движения до второго транспортного средства 12.
[0104]
Точнее, компонент 108 определения предсказания движения заранее устанавливает одно или множество пороговых значений для каждого положения второго транспортного средства 12. Например, для каждого из короткого расстояния (33a, 34a) и длинного расстояния (33b, 34b) устанавливается одно или несколько пороговых значений. Компонент 108 определения предсказания движения выбирает одно или множество пороговых значений, соответствующих расстоянию (33a, 33b, 34a, 34b), полученному компонентом 104 получения структуры полосы движения. Таким образом, компонент 108 определения предсказания движения заранее устанавливает разные пороговые значения для каждого положения второго транспортного средства 12 и выбирает из числа пороговых значений пороговое значение, соответствующее фактическому положению второго транспортного средства 12, тем самым корректируя пороговое значение.
[0105]
Конфигурация устройства предсказания движения другого транспортного средства согласно второму варианту осуществления является такой же, за исключением вышеупомянутых моментов, как конфигурация устройства предсказания движения другого транспортного средства согласно первому варианту осуществления, объясненная со ссылкой на фиг. 1.
[0106]
Со ссылкой на фиг. 3 в качестве способа предсказания движения другого транспортного средства согласно второму варианту осуществления будет объяснен рабочий пример устройства предсказания движения другого транспортного средства согласно второму варианту осуществления. Фиг. 3 многократно выполняется с заранее заданными интервалами с момента включения выключателя зажигания собственного транспортного средства 11 (в случае электромобиля источник питания включен) до момента его выключения. Кроме того, поток управления на фиг. 3 основан на предположении, что собственное транспортное средство 11 управляется посредством автоматического вождения.
[0107]
На этапах S301-S305 выполняются те же операции обработки, что и на этапах S201-S205 на фиг. 2.
[0108]
На этапе S306 устройство предсказания движения другого транспортного средства определяет в соответствии с выбранным пользователем состоянием в связи с коррекцией вероятности смены полосы движения, должна ли корректироваться вероятность смены полосы движения. Если пользователь выбрал корректировку вероятности смены полосы движения в соответствии с положением второго транспортного средства 12 (ДА на этапе S306), он переходит к этапу S307. С другой стороны, если пользователь выбрал не корректировать вероятность смены полосы движения в соответствии с положением второго транспортного средства 12 (НЕТ на S306), он переходит к этапу S308.
[0109]
На этапе S308 компонент 105 вычисления вероятности вычисляет вероятность смены полосы движения согласно величине состояния. Величина состояния представляет собой одно или комбинацию из двух или более из ориентации, направления движения и угла θ второго транспортного средства 12, ускорения второго транспортного средства 12, степени близости второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a, первого расстояния (38a, 38b) между транспортными средствами, второго расстояния (39a, 39b) между транспортными средствами, размера второго транспортного средства 12 или первого предшествующего транспортного средства (13a, 13b) и относительной скорости второго транспортного средства 12 по отношению к собственному транспортному средству 11. После этого он переходит к этапу S310.
[0110]
На этапе S307 компонент 105 вычисления вероятности вычисляет, аналогично этапу S308, вероятность смены полосы движения согласно величине состояния. Кроме того, компонент 105 вычисления вероятности корректирует вероятность смены полосы движения в соответствии с положением второго транспортного средства 12. Точнее, компонент 105 вычисления вероятности изменяет в соответствии с положением второго транспортного средства 12 вес, применяемый к величине состояния, используемой для вычисления вероятности смены полосы движения, тем самым корректируя вероятность смены полосы движения. После этого он переходит к этапу S309.
[0111]
На этапе S309 устройство предсказания движения другого транспортного средства определяет в соответствии с выбранным пользователем состоянием, касающимся коррекции порогового значения, необходимо ли корректировать пороговое значение. Если корректировка порогового значения в соответствии с положением второго транспортного средства 12 была выбрана пользователем (ДА на этапе S309), он переходит к этапу S310. С другой стороны, если пользователь не выбрал корректировку порогового значения в соответствии с положением второго транспортного средства 12 (НЕТ на S309), он переходит к этапу S311.
[0112]
На этапе S311 компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения, скорректированную на этапе S307 (вероятность смены полосы движения после коррекции), с пороговым значением до коррекции. Если вероятность смены полосы движения после коррекции больше, чем пороговое значение до коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, если вероятность смены полосы движения после коррекции равна или меньше порогового значения до коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 не выполняет смену полосы движения. После этого он переходит к этапу S312.
[0113]
На этапе S310 компонент 108 определения предсказания движения сначала корректирует пороговое значение в соответствии с положением второго транспортного средства 12. Затем, если этап S308 был пройден, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения, вычисленную на этапе S308 (вероятность смены полосы движения до коррекции), со скорректированным пороговым значением (пороговое значение после коррекции). Если вероятность смены полосы движения до коррекции больше, чем пороговое значение после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, если вероятность смены полосы движения до коррекции равна или меньше порогового значения после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 не выполняет смену полосы движения.
[0114]
С другой стороны, если этап S307 был пройден, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения, скорректированную на этапе S307 (вероятность смены полосы движения после коррекции), с пороговым значением после коррекции. Если вероятность смены полосы движения после коррекции больше, чем пороговое значение после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 выполняет смену полосы движения. С другой стороны, если вероятность смены полосы движения после коррекции равна или меньше порогового значения после коррекции, компонент 108 определения предсказания движения определяет, что второе транспортное средство 12 не выполняет смену полосы движения. После этого он переходит к этапу S312.
[0115]
На этапах S312 и S313 выполняются те же операции обработки, что и на этапах S212 и S213 на фиг. 2.
[0116]
Как объяснено выше, согласно второму варианту осуществления достигаются нижеперечисленные функции и эффекты.
[0117]
Как показано на фиг. 4A и 4B, в реальных условиях транспортное средство проезжает через места с разной шириной дороги и шириной полосы движения. Если ширина полосы движения отличается, положение второго транспортного средства 12 по отношению к собственному транспортному средству 11 или линии 31 границы полосы движения изменяется, а также изменяется движение второго транспортного средства 12 при выполнении смены полосы движения. Благодаря этому устройство предсказания движения другого транспортного средства корректирует в соответствии с положением второго транспортного средства 12 в направлении ширины полосы движения относительно собственного транспортного средства 11 или линии 31 границы полосы движения по меньшей мере одно из вероятности смены полосы движения и порогового значения. Компонент 108 определения предсказания движения сравнивает одно из вероятности смены полосы движения и порогового значения, скорректированных согласно положению второго транспортного средства 12, с другим из вероятности смены полосы движения и порогового значения, не скорректированных согласно положению второго транспортного средства 12. В качестве альтернативы, компонент 108 определения предсказания движения сравнивает вероятность смены полосы движения и пороговое значение, оба скорректированные в соответствии с положением второго транспортного средства 12, друг с другом. Согласно любому из результатов сравнения, компонент 108 определения предсказания движения определяет, выполняет ли второе транспортное средство 12 смену полосы движения. Предсказание смены полосы движения с учетом ширины (32a, 32b) полосы движения соседней полосы G2 движения может подавить ошибочное предсказание смены полосы движения или задержку предсказания. Кроме того, оно подавляет замедление собственного транспортного средства 11 из-за ошибочного предсказания или внезапного замедления собственного транспортного средства 11 из-за задержки предсказания.
[0118]
Компонент 105 вычисления вероятности изменяет вес, применяемый к величине состояния, согласно положению второго транспортного средства 12, тем самым корректируя вероятность смены полосы движения согласно положению второго транспортного средства 12. Даже на дорогах с разной шириной полосы движения можно вычислить вероятность смены полосы движения без учета влияния ширины полосы движения.
[0119]
Величина состояния может быть ориентацией второго транспортного средства 12, направлением движения второго транспортного средства 12 или углом θ, образованным направлением движения второго транспортного средства 12 и направлением полосы движения правой полосы G2 движения. Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится ближе к собственному транспортному средству 11 или к линии 31 границы полосы движения, вес, применяемый к ориентации, направлению движения или углу θ. По мере того как положение второго транспортного средства 12 становится ближе к собственному транспортному средству 11 или к линии 31 границы полосы движения, можно при определении смены полосы движения придавать важность ориентации, направлению движения или углу θ. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0120]
Величина состояния может быть ускорением второго транспортного средства 12 или степенью близости второго транспортного средства 12 по отношению к первому предшествующему транспортному средству 13a. Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится ближе к собственному транспортному средству 11 или к линии 31 границы полосы движения, вес, применяемый к ускорению или степени близости. По мере того как положение второго транспортного средства 12 становится ближе к собственному транспортному средству или к линии 31 границы полосы движения, можно при определении смены полосы движения придавать важность ускорению или степени близости. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0121]
Величина состояния может быть, как показано на фиг. 6A и 6B, первым расстоянием (38a, 38b) между транспортными средствами. Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения, вес, применяемый к первому расстоянию между транспортными средствами. По мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения, можно при определении смены полосы движения придавать важность первому расстоянию между транспортными средствами. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0122]
Величина состояния может быть, как показано на фиг. 7A-7C, вторым расстоянием (39a, 39b) между транспортными средствами. Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения, вес, применяемый к второму расстоянию между транспортными средствами. По мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения, можно при определении смены полосы движения придавать важность второму расстоянию между транспортными средствами. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0123]
Величина состояния может быть, как показано на фиг. 5A и 5C, размером второго транспортного средства 12, размером первого предшествующего транспортного средства (13a, 13b) или разницей высот транспортных средств. Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства становится ближе к собственному транспортному средству 11 или линии 31 границы полосы движения, вес, применяемый к размеру второго транспортного средства 12, размеру первого предшествующего транспортного средства (13a, 13b), или разнице высот транспортных средств. По мере того как положение второго транспортного средства становится ближе к собственному транспортному средству 11 или линии 31 границы полосы движения, можно при определении смены полосы движения придавать важность размеру второго транспортного средства 12, размеру первого предшествующего транспортного средства (13a, 13b), или разницев высот транспортных средств. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0124]
Величина состояния может быть относительной скоростью второго транспортного средства 12 по отношению к собственному транспортному средству 11. Компонент 105 вычисления вероятности увеличивает, по мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения, вес, применяемый к относительной скорости. По мере того как положение второго транспортного средства 12 становится дальше от собственного транспортного средства 11 или линии 31 границы полосы движения, можно при определении смены полосы движения придавать важность относительной скорости. Без учета влияния ширины полосы движения можно вычислить правильную вероятность смены полосы движения.
[0125]
Компонент 105 вычисления вероятности вычисляет в соответствии с величинами состояния (x, θ) соответствующие вероятности смены полосы движения (ρ(x), ρ(θ)). Веса (α, β), применяемые к вышеупомянутым величинам состояния, регулируются в соответствии с шириной полосы движения, и вычисляется множество вероятностей смены полосы движения после коррекции (α⋅ρ(x), β⋅ρ(θ)). Множество вероятностей смены полосы движения после коррекции используется с выражением (1) для вычисления одной вероятности смены полосы движения после коррекции (P). Благодаря этому повышается точность вычисления вероятности смены полосы движения.
[0126]
Компонент 108 определения предсказания движения устанавливает для каждого положения второго транспортного средства 12 одно или множество пороговых значений и выбирает одно или множество пороговых значений, соответствующих положению второго транспортного средства 12, указанному информацией, полученной компонентом 104 получения структуры полосы движения. Компонент 108 определения предсказания движения сравнивает выбранное пороговое значение (пример порогового значения после коррекции) с вероятностью смены полосы движения и предсказывает смену полосы движения, которая должна быть выполнена вторым транспортным средством 12. Без влияния ширины полосы движения смену полосы движения можно правильно предсказать.
[0127]
«Установить множество пороговых значений» означает установить пороговые значения для величин состояния, используемых для вычисления вероятности смены полосы движения, соответственно. Компонент 108 определения предсказания движения сравнивает для каждой из величин состояния (x, θ, ...) выбранное пороговое значение с вероятностью смены полосы движения (ρ(x), ρ(θ), ...), тем самым определяя, выполняет ли второе транспортное средство 12 смену полосы движения. Без влияния ширины полосы движения смену полосы движения можно правильно предсказать.
[0128]
«Установить множество пороговых значений» означает установить для многоступенчатого управления первым расстоянием (38a, 38b) между транспортными средствами или скоростью собственного транспортного средства 11 множество пороговых значений для величин состояния, используемых для вычисления вероятности смены полосы движения, или вероятности смены полосы движения. Без влияния ширины полосы движения можно реализовать многоступенчатое управление транспортным средством собственного транспортного средства 11 для обеспечения безопасности в отношении смены полосы движения второго транспортного средства 12.
[0129]
Каждая из функций, упомянутых в вышеупомянутых вариантах осуществления, может быть реализована с помощью одной или множества схем обработки. Схемы обработки включают в себя запрограммированные устройства обработки, такие как устройства обработки, содержащие электрические схемы. Кроме того, устройства обработки включают специализированные интегральные схемы (ASIC) и традиционные схемные компоненты, выполненные с возможностью выполнения функций, упомянутых в вариантах осуществления.
[0130]
Вышеупомянутые варианты осуществления являются примерами настоящего изобретения. Соответственно, настоящее изобретение не ограничивается вышеупомянутыми вариантами осуществления и, естественно, охватывает в пределах объема технических идей настоящего изобретения варианты осуществления, отличные от упомянутых здесь, или модификации, основанные на различных конструкциях.
Описание ссылочных позиций
[0131]
11: Собственное транспортное средство
12: Второе транспортное средство
13а, 13b: Первое предшествующее транспортное средство
14: Второе предшествующее транспортное средство
32а, 32b: Ширина полосы движения
33а, 33b: Расстояние (первая величина близости)
34а, 34b: Расстояние (вторая величина близости)
37: Расстояние (степень близости)
38а, 38b: Первое расстояние между транспортными средствами
39а, 39b: Второе расстояние между транспортными средствами
G1: Собственная полоса движения
G2: Соседняя полоса движения
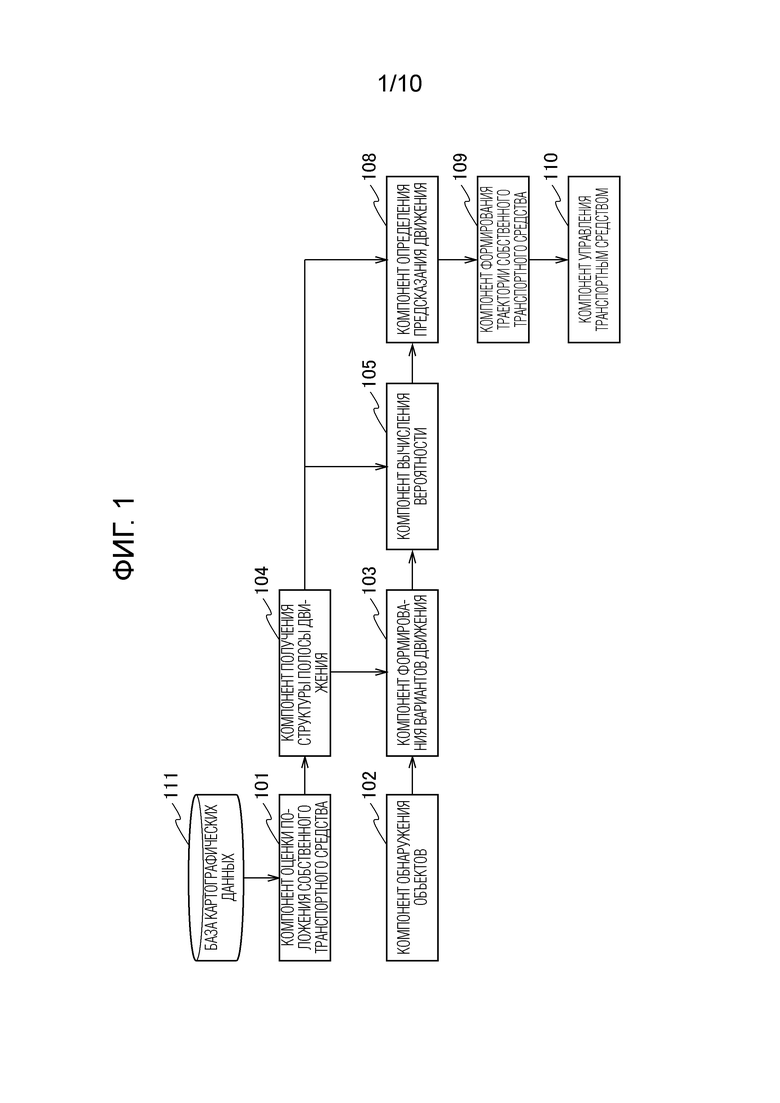
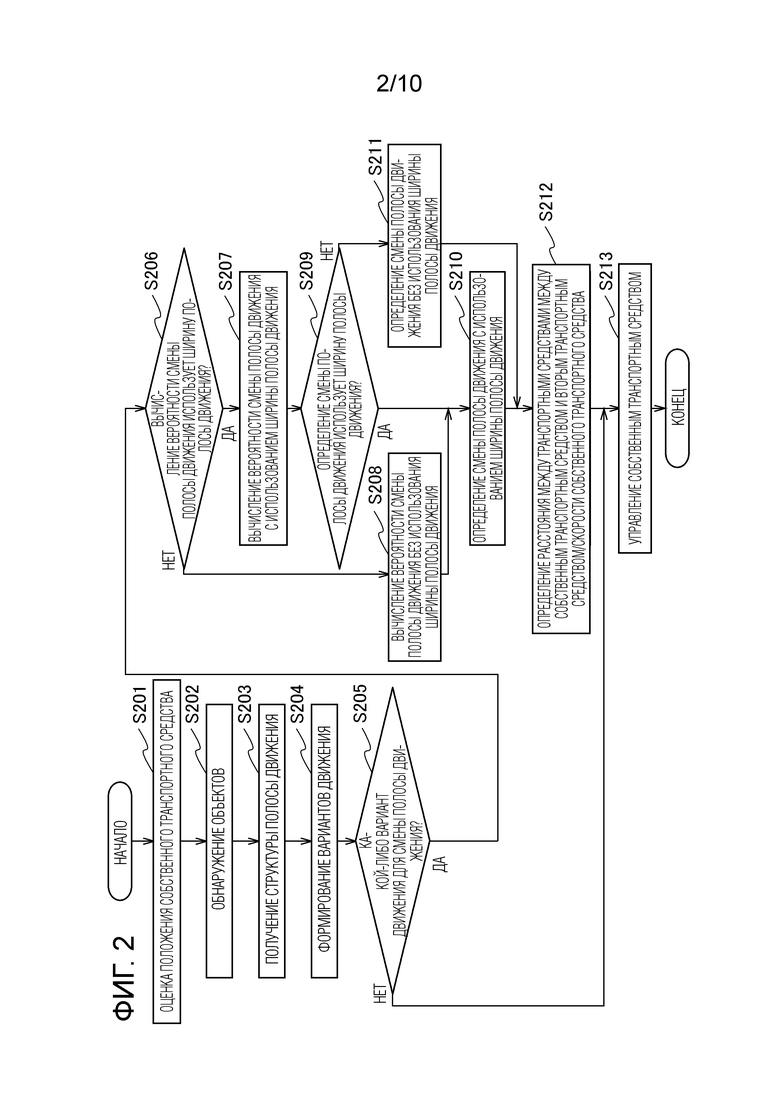
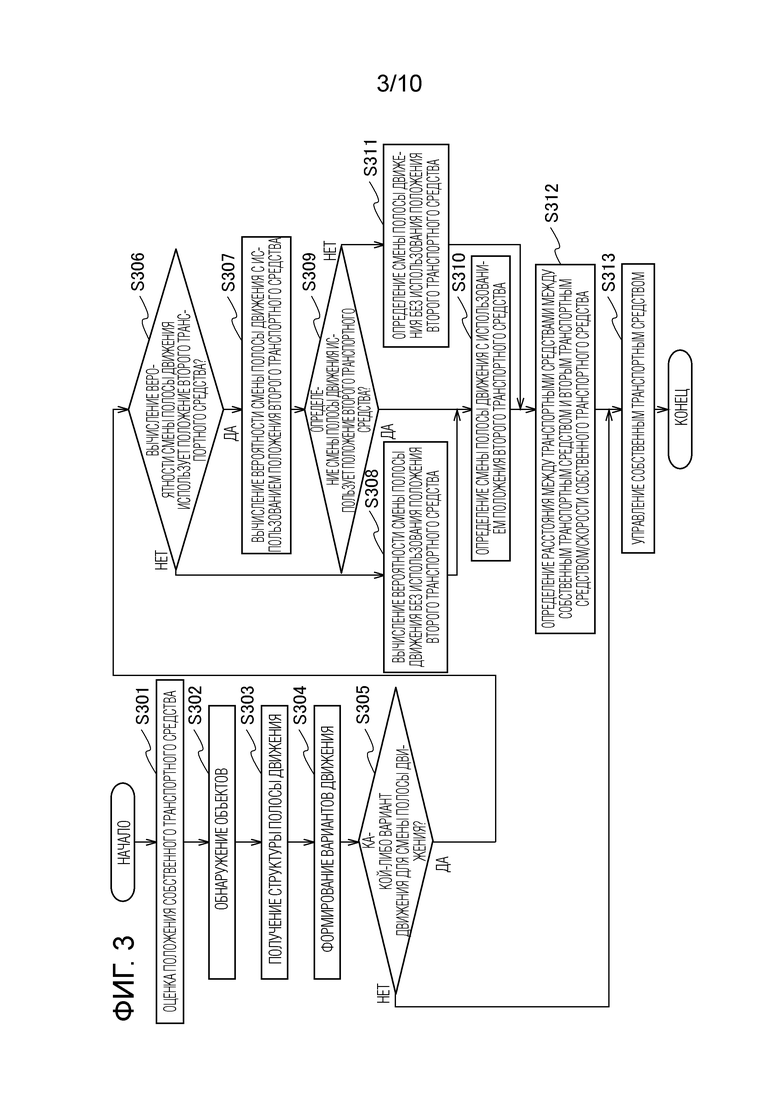
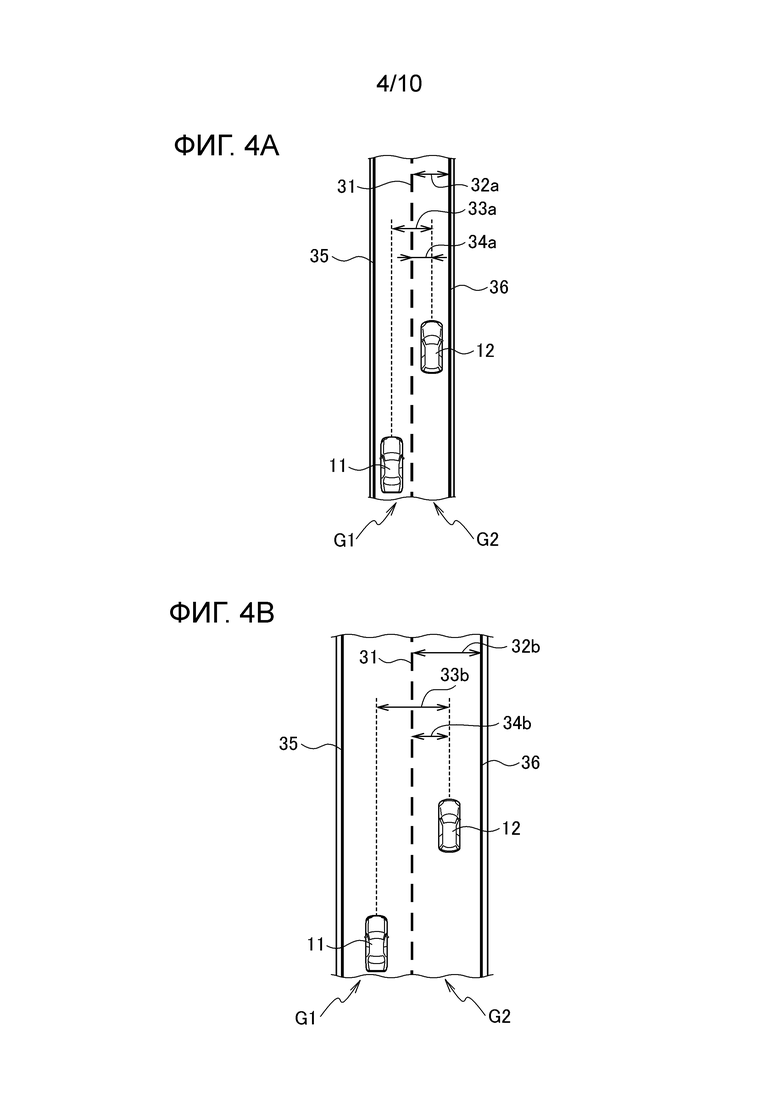
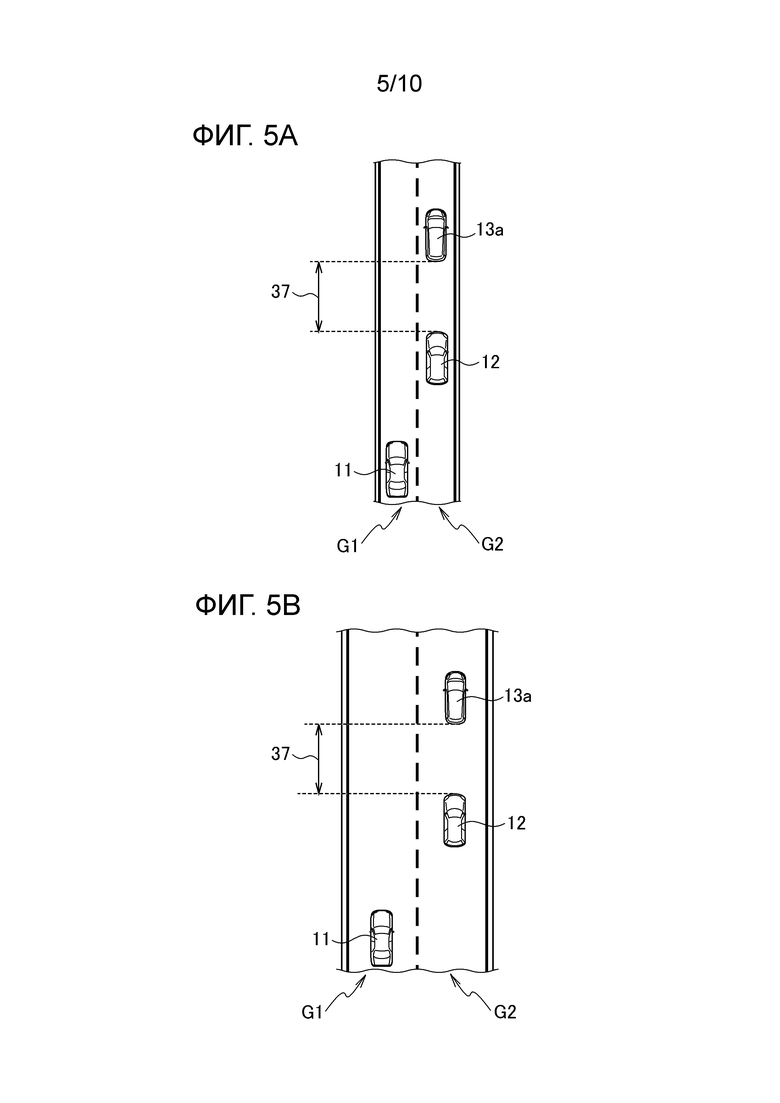
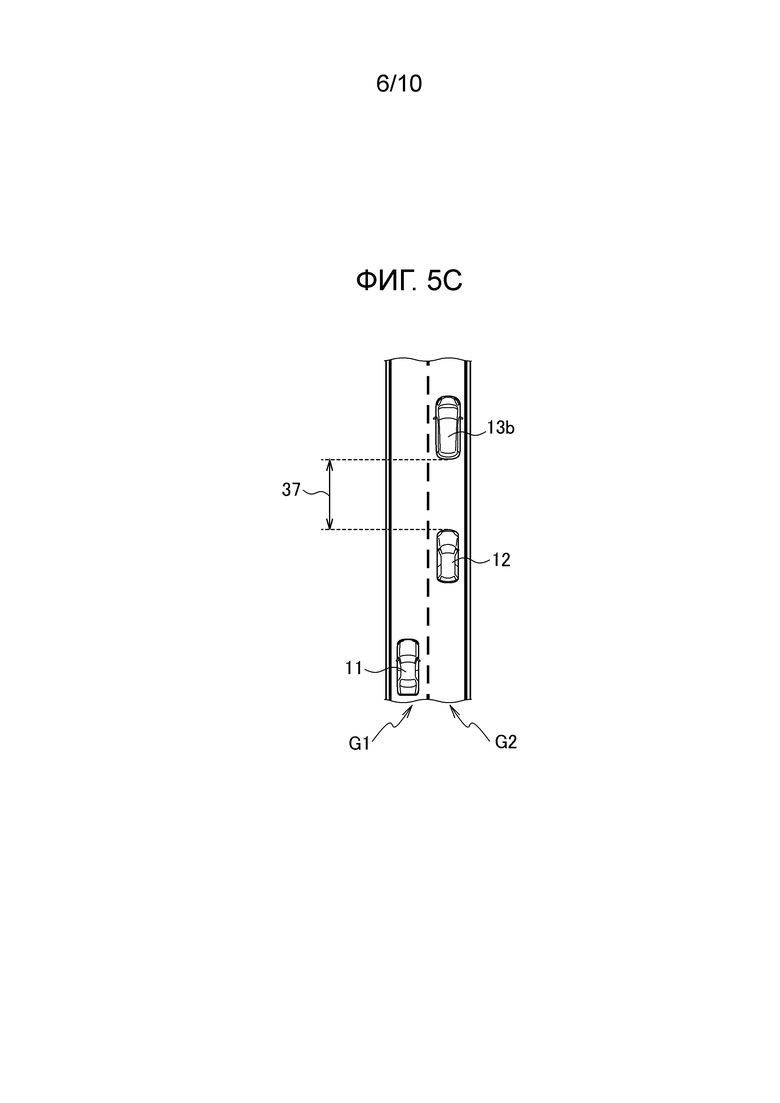
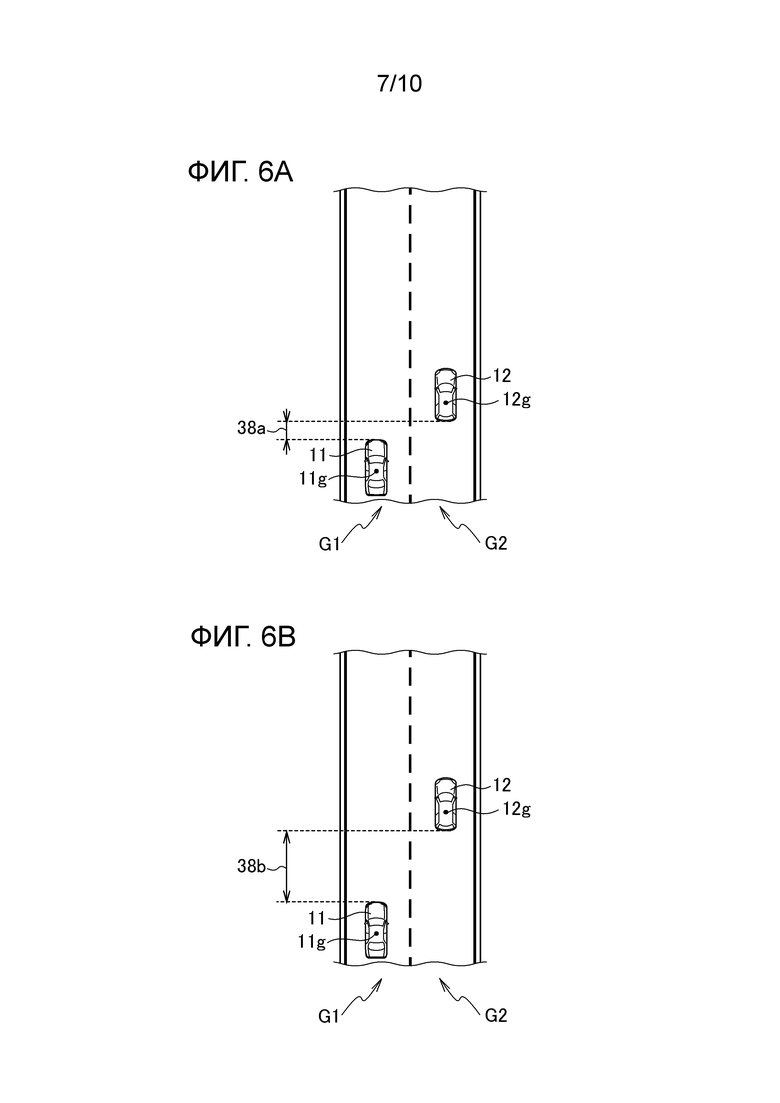
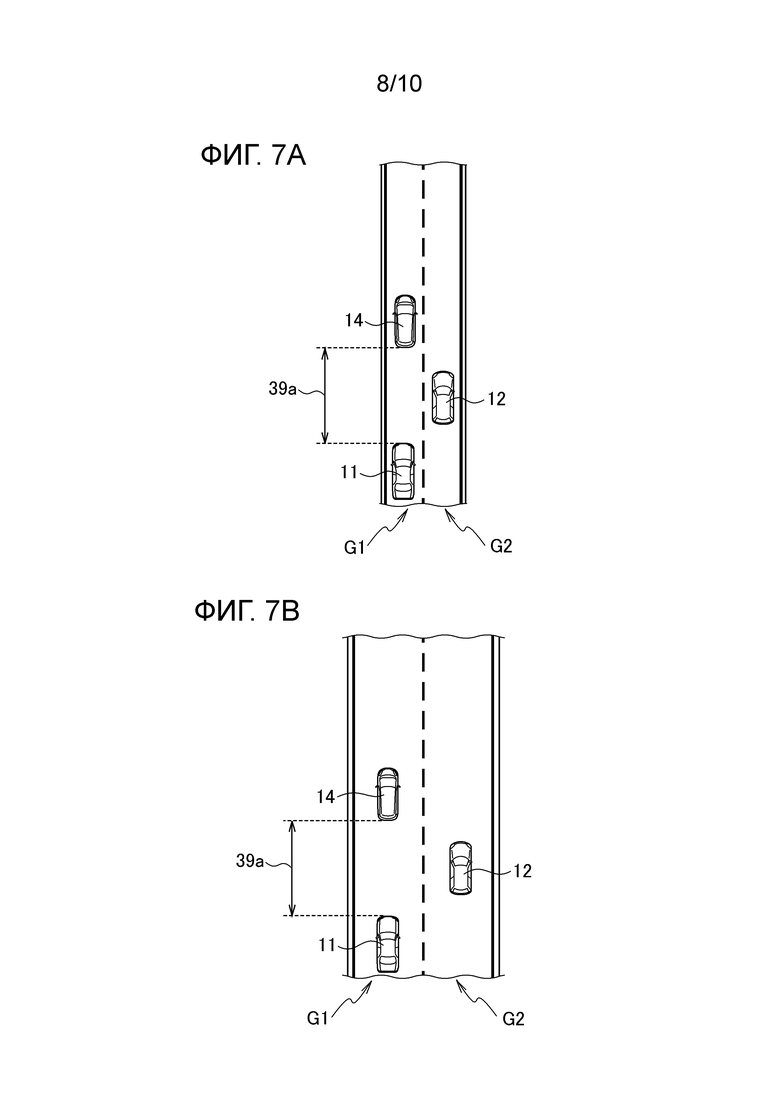
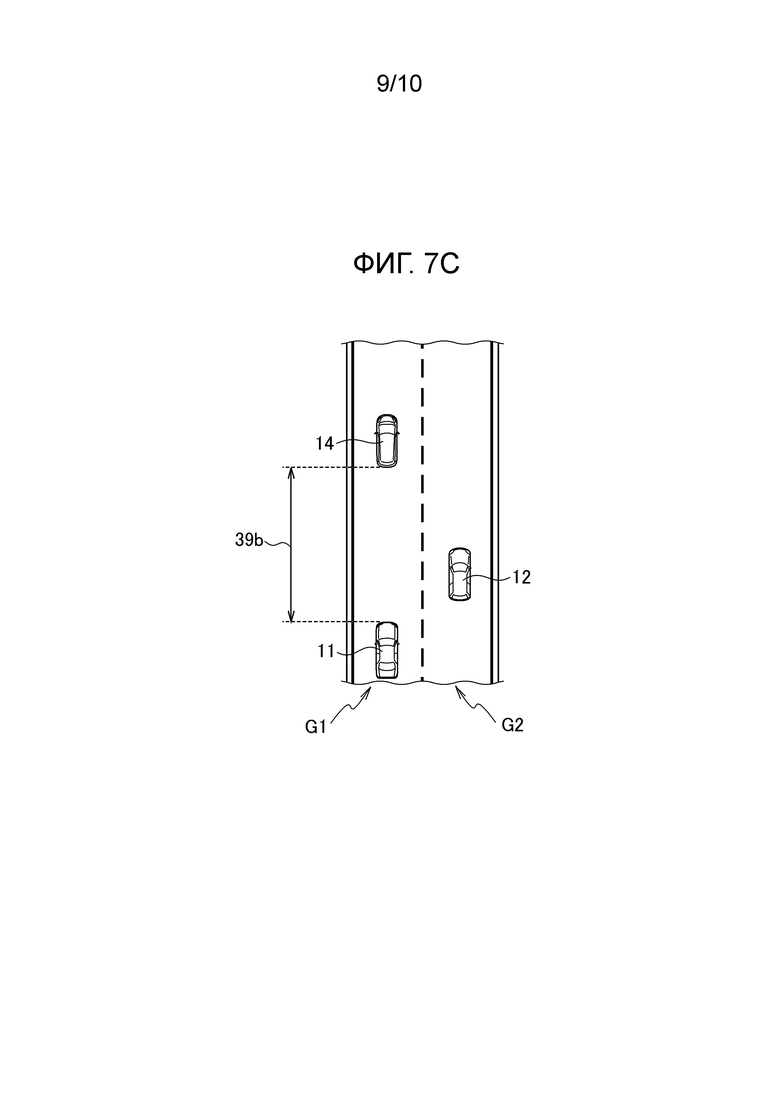
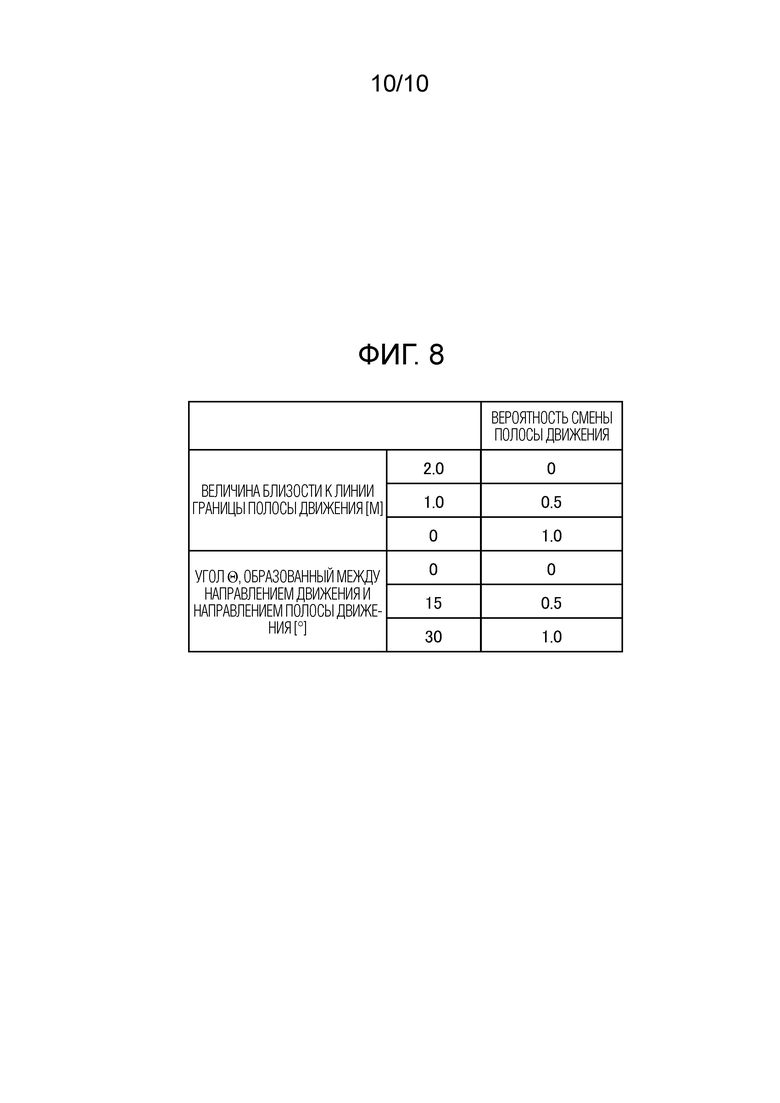
Способ предсказания движения другого транспортного средства, который вычисляет, на основании поведения второго транспортного средства, движущегося в соседней полосе движения, вероятность смены полосы движения, указывающую вероятность проведения смены полосы движения вторым транспортным средством впереди собственного транспортного средства с соседней полосы движения на собственную полосу движения, в которой движется собственное транспортное средство, и с помощью вероятности смены полосы движения и порогового значения предсказывает смену полосы движения, которую должно выполнить второе транспортное средство. Предложены также способ предсказания движения другого транспортного средства и устройства предсказания движения другого транспортного средства. Достигается подавление ошибочного предсказания движения другого транспортного средства или задержка предсказания. 4 н. и 21 з.п. ф-лы, 14 ил.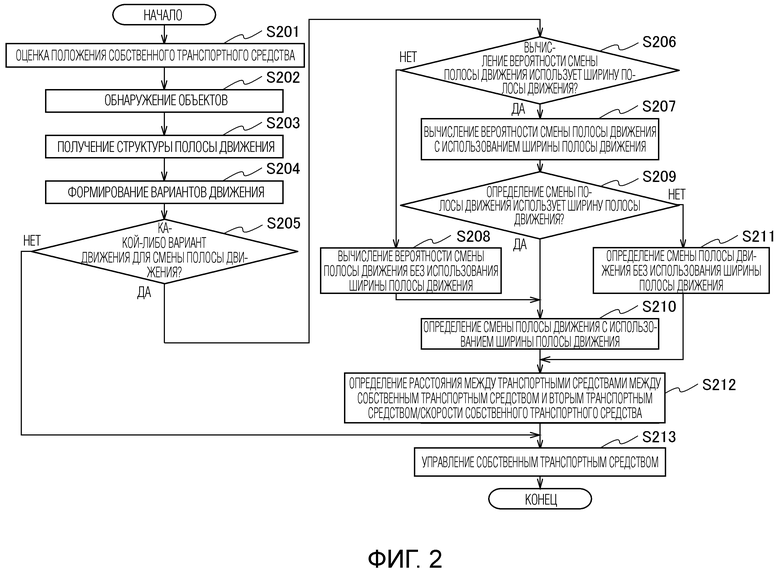
1. Способ предсказания движения другого транспортного средства устройства предсказания движения другого транспортного средства для вычисления вероятности смены полосы движения, указывающей вероятность того, что второе транспортное средство выполнит смену полосы движения перед собственным транспортным средством с соседней полосы движения на собственную полосу движения, в которой движется собственное транспортное средство, в соответствии с поведением второго транспортного средства, движущегося по полосе движения, соседней с собственной полосой движения, и предсказания смены полосы движения, которая должна выполняться вторым транспортным средством, с использованием вероятности смены полосы движения и порогового значения, характеризующийся этапами, на которых:
получают информацию, указывающую ширину полосы движения соседней полосы движения;
корректируют в соответствии с шириной полосы движения по меньшей мере одно из вероятности смены полосы движения и порогового значения; и
сравнивают вероятность смены полосы движения после коррекции с пороговым значением до коррекции, или сравнивают вероятность смены полосы движения до коррекции с пороговым значением после коррекции, или сравнивают вероятность смены полосы движения после коррекции с пороговым значением после коррекции, тем самым определяя, выполняет ли второе транспортное средство смену полосы движения.
2. Способ предсказания движения другого транспортного средства устройства предсказания движения другого транспортного средства для вычисления вероятности смены полосы движения, указывающей вероятность того, что второе транспортное средство выполнит смену полосы движения перед собственным транспортным средством с соседней полосы движения на собственную полосу движения, в которой движется собственное транспортное средство, в соответствии с поведением второго транспортного средства, движущегося по полосе движения, соседней с собственной полосой движения, и предсказания смены полосы движения, которая должна выполняться вторым транспортным средством, с использованием вероятности смены полосы движения и порогового значения, характеризующийся этапами, на которых:
получают информацию, указывающую положение второго транспортного средства в направлении ширины полосы движения относительно линии границы полосы движения, существующей между собственным транспортным средством и соседней полосой движения;
корректируют в соответствии с положением второго транспортного средства по меньшей мере одно из вероятности смены полосы движения и порогового значения; и
сравнивают вероятность смены полосы движения после коррекции с пороговым значением до коррекции, или сравнивают вероятность смены полосы движения до коррекции с пороговым значением после коррекции, или сравнивают вероятность смены полосы движения после коррекции с пороговым значением после коррекции, тем самым определяя, выполняет ли второе транспортное средство смену полосы движения.
3. Способ предсказания движения другого транспортного средства по п.1, характеризующийся тем, что:
корректировка, согласно ширине полосы движения, вероятности смены полосы движения предназначена для изменения, согласно ширине полосы движения, веса, применяемого к величине состояния, используемой для вычисления вероятности смены полосы движения; и
величина состояния с примененным весом используется для вычисления вероятности смены полосы движения.
4. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя положение второго транспортного средства, первую величину близости, которая является величиной приближения второго транспортного средства к собственному транспортному средству, или вторую величину близости, которая является величиной приближения второго транспортного средства к линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения; и
по мере того как ширина полосы движения становится шире, вес, применяемый к положению, первой величине близости или второй величине близости, увеличивается.
5. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя по меньшей мере одно из ориентации второго транспортного средства, направления движения второго транспортного средства и угла, вычисленного по меньшей мере из одного из ориентации и направления движения и направления полосы движения для соседней полосы движения в положении второго транспортного средства; и
по мере того как ширина полосы движения становится уже, вес, применяемый к ориентации, направлению движения или углу, увеличивается.
6. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя ускорение второго транспортного средства или степень близости второго транспортного средства по отношению к первому предшествующему транспортному средству, движущемуся впереди второго транспортного средства в соседней полосе движения; и
по мере того как ширина полосы движения становится уже, вес, применяемый к ускорению или степени близости, увеличивается.
7. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя первое расстояние между транспортными средствами между вторым транспортным средством и собственным транспортным средством; и
по мере того как ширина полосы движения становится шире, вес, применяемый к первому расстоянию между транспортными средствами, увеличивается.
8. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя второе расстояние между транспортными средствами между собственным транспортным средством и вторым предшествующим транспортным средством, движущимся впереди собственного транспортного средства в собственной полосе движения; и
по мере того как ширина полосы движения становится шире, вес, применяемый ко второму расстоянию между транспортными средствами, увеличивается.
9. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя размер второго транспортного средства и размер первого предшествующего транспортного средства, движущегося впереди второго транспортного средства в соседней полосе движения; и
по мере того как ширина полосы движения становится уже, вес, применяемый к размеру второго транспортного средства и размеру первого предшествующего транспортного средства, увеличивается.
10. Способ предсказания движения другого транспортного средства по п.3, характеризующийся тем, что:
величина состояния включает в себя относительную скорость второго транспортного средства по отношению к собственному транспортному средству; и
по мере того как ширина полосы движения становится шире, вес, применяемый к относительной скорости, увеличивается.
11. Способ предсказания движения другого транспортного средства по п.2, характеризующийся тем, что:
корректировка, согласно положению, вероятности смены полосы движения предназначена для изменения, согласно положению, веса, применяемого к величине состояния, используемой для вычисления вероятности смены полосы движения; и
величина состояния с примененным весом используется для вычисления вероятности смены полосы движения.
12. Способ предсказания движения другого транспортного средства по п.11, характеризующийся тем, что:
величина состояния включает в себя по меньшей мере одно из ориентации второго транспортного средства, направления движения второго транспортного средства и угла, вычисленного по меньшей мере из одного из ориентации и направления движения и направления полосы движения для соседней полосы движения в положении второго транспортного средства; и
по мере того как упомянутое положение становится ближе к собственному транспортному средству или к линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения, вес, применяемый к ориентации, направлению движения или углу, увеличивается.
13. Способ предсказания движения другого транспортного средства по п.11, характеризующийся тем, что:
величина состояния включает в себя ускорение второго транспортного средства или степень близости второго транспортного средства по отношению к первому предшествующему транспортному средству, движущемуся впереди второго транспортного средства в соседней полосе движения; и
по мере того как упомянутое положение становится ближе к собственному транспортному средству или к линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения, вес, применяемый к ускорению или степени близости, увеличивается.
14. Способ предсказания движения другого транспортного средства по п.11, характеризующийся тем, что:
величина состояния включает в себя первое расстояние между транспортными средствами, между вторым транспортным средством и собственным транспортным средством; и
по мере того как упомянутое положение становится ближе к собственному транспортному средству или к линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения, вес, прикладываемый к первому расстоянию между транспортными средствами, увеличивается.
15. Способ предсказания движения другого транспортного средства по п.11, характеризующийся тем, что:
величина состояния включает в себя второе расстояние между транспортными средствами, между собственным транспортным средством и вторым предшествующим транспортным средством, движущимся впереди собственного транспортного средства в собственной полосе движения; и
по мере того как упомянутое положение становится дальше от собственного транспортного средства или от линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения, вес, применяемый ко второму расстоянию между транспортными средствами, увеличивается.
16. Способ предсказания движения другого транспортного средства по п.11, характеризующийся тем, что:
величина состояния включает в себя размер второго транспортного средства и размер первого предшествующего транспортного средства, движущегося впереди второго транспортного средства в соседней полосе движения; и
по мере того как упомянутое положение становится ближе к собственному транспортному средству или к линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения, вес, применяемый к размеру второго транспортного средства и размеру первого предшествующего транспортного средства, увеличивается.
17. Способ предсказания движения другого транспортного средства по п.11, характеризующийся тем, что:
величина состояния включает в себя относительную скорость второго транспортного средства по отношению к собственному транспортному средству; и
по мере того как упомянутое положение становится дальше от собственного транспортного средства или от линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения, вес, применяемый к относительной скорости, увеличивается.
18. Способ предсказания движения другого транспортного средства по любому из пп. 4-10 и 12-17, характеризующийся тем, что в соответствии с величиной состояния и весом, примененным к величине состояния, вычисляется одна вероятность смены полосы движения.
19. Способ предсказания движения другого транспортного средства по п.1, характеризующийся тем, что:
корректировка, согласно ширине полосы движения, порогового значения включает в себя этапы, на которых:
устанавливают для каждой ширины полосы движения одно или множество пороговых значений; и
выбирают одно или множество пороговых значений, соответствующих ширине полосы движения, указанной полученной информацией; и
выбранное пороговое значение сравнивается с вероятностью смены полосы движения и определяется, выполняет ли второе транспортное средство смену полосы движения.
20. Способ предсказания движения другого транспортного средства по п. 19, характеризующийся тем, что при корректировке порогового значения в соответствии с шириной полосы движения вероятность смены полосы движения вычисляется в предположении, что второе транспортное средство расположено на линии границы полосы движения, отделяющей собственную полосу движения от соседней полосы движения.
21. Способ предсказания движения другого транспортного средства по п.2, характеризующийся тем, что:
корректировка, согласно положению, порогового значения включает в себя этапы, на которых:
устанавливают одно или множество пороговых значений для каждого положения; и
выбирают одно или множество пороговых значений, соответствующих положению, указанному полученной информацией; и
выбранное пороговое значение сравнивается с вероятностью смены полосы движения и определяется, выполняет ли второе транспортное средство смену полосы движения.
22. Способ предсказания движения другого транспортного средства по п. 19 или 21, характеризующийся тем, что:
установка множества пороговых значений предназначена для установки порогового значения для каждой величины состояния, используемой для вычисления вероятности смены полосы движения; и
для каждой величины состояния выбранное одно из пороговых значений сравнивается с вероятностью смены полосы движения.
23. Способ предсказания движения другого транспортного средства по п. 19 или 21, характеризующийся тем, что установка множества пороговых значений предназначена для многоступенчатого управления расстоянием между транспортными средствами, между собственным транспортным средством и вторым транспортным средством, или скоростью собственного транспортного средства, чтобы установить множество пороговых значений для величины состояния, используемой для вычисления вероятности смены полосы движения, или для вероятности смены полосы движения.
24. Устройство предсказания движения другого транспортного средства для вычисления вероятности смены полосы движения, указывающей вероятность того, что второе транспортное средство выполнит смену полосы движения перед собственным транспортным средством с соседней полосы на собственную полосу движения, в соответствии с поведением второго транспортного средства, движущегося по полосе движения, соседней с собственной полосой движения, в которой движется собственное транспортное средство, и предсказания смены полосы движения, которая должна выполняться вторым транспортным средством, с использованием вероятности смены полосы движения и порогового значения, характеризующееся тем, что блок управления:
получает информацию, указывающую ширину полосы движения соседней полосы движения;
корректирует в соответствии с шириной полосы движения по меньшей мере одно из вероятности смены полосы движения и порогового значения; и
сравнивает вероятность смены полосы движения после коррекции с пороговым значением до коррекции, или сравнивает вероятность смены полосы движения до коррекции с пороговым значением после коррекции, или сравнивает вероятность смены полосы движения после коррекции с пороговым значением после коррекции, тем самым определяя, выполняет ли второе транспортное средство смену полосы движения.
25. Устройство предсказания движения другого транспортного средства для вычисления вероятности смены полосы движения, указывающей вероятность того, что второе транспортное средство выполнит смену полосы движения перед собственным транспортным средством с соседней полосы движения на собственную полосу движения, в соответствии с поведением второго транспортного средства, движущегося по полосе движения, соседней с собственной полосой движения, в которой движется собственное транспортное средство, и предсказания смены полосы движения, которая должна выполняться вторым транспортным средством, с использованием вероятности смены полосы движения и порогового значения, характеризующееся тем, что блок управления:
получает информацию, указывающую положение второго транспортного средства;
корректирует в соответствии с положением по меньшей мере одно из вероятности смены полосы движения и порогового значения; и
сравнивает вероятность смены полосы движения после коррекции с пороговым значением до коррекции, или сравнивает вероятность смены полосы движения до коррекции с пороговым значением после коррекции, или сравнивает вероятность смены полосы движения после коррекции с пороговым значением после коррекции, тем самым определяя, выполняет ли второе транспортное средство смену полосы движения.
| JP 2017154614 A, 07.09.2017 | |||
| JP 2005346371 A, 15.12.2005 | |||
| JP 2001199260 A, 24.07.2001. |

