Область техники
[0001]
Настоящее изобретение относится к способу предсказания действий другого транспортного средства и устройству предсказания действий другого транспортного средства.
Уровень техники
[0002]
Известны методы, позволяющие оценить путь движения другого транспортного средства (см. Патентную литературу 1). Устройство, раскрытое в Патентной литературе 1, получает пути движения другого транспортного средства в каждом из условий, в которых водитель соблюдает правила дорожного движения и в которых водитель не соблюдает правила дорожного движения, и обнаруживает отклонение оси, которое представляет собой отклонение между направлением полосы движения, по которой движется другое транспортное средство, и направлением оси другого транспортного средства. Устройство оценивает путь движения другого транспортного средства, сохраняя при этом путь движения при условии, что водитель соблюдает правила дорожного движения, когда отклонение оси небольшое, и переключается на путь движения при условии, что водитель не соблюдает правила дорожного движения, когда отклонение оси большое.
Документы предшествующего уровня техники
Патентная литература
[0003]
Патентная литература 1: Публикация непрошедшей экспертизу патентной заявки Японии № 2009-003650
Сущность изобретения
[0004]
Устройство, раскрытое в Патентной литературе 1, оценивает путь движения при условии, что водитель не соблюдает правила дорожного движения, когда отклонение оси превышает пороговое значение. Предсказание пути движения другого транспортного средства при условии, что водитель не соблюдает правила дорожного движения, доступно только при обнаружении большого действия в направлении оси другого транспортного средства. Это может привести к задержке в предсказании пути движения другого транспортного средства. Если пороговое значение, используемое для отклонения оси, установлено меньшим, устройство может ошибочно предсказать путь движения другого транспортного средства. Таким образом, путь движения другого транспортного средства не может быть предсказан быстро и точно только в соответствии с отклонением оси.
[0005]
Ввиду вышеизложенной проблемы настоящее изобретение обеспечивает способ предсказания действий другого транспортного средства и устройство предсказания действий другого транспортного средства, способное предотвращать ошибку и задержку в предсказании действия другого транспортного средства.
[0006]
Аспектом настоящего изобретения является способ предсказания действий другого транспортного средства для предсказания того, что другое транспортное средство, движущееся по смежной полосе, смежной с собственной полосой, по которой движется рассматриваемое транспортное средство, выполняет смену полосы движения со смежной полосы движения на собственную полосу движения впереди рассматриваемого транспортного средства в соответствии с поведением другого транспортного средства. Способ предсказания действий другого транспортного средства получает фактическое состояние движения другого транспортного средства, получает информацию регулирования дорожного движения о регулировании дорожного движения в отношении смежной полосы движения, предсказывает предсказываемое состояние движения, которое является состоянием движения другого транспортного средства при движении в соответствии с регулированием дорожного движения, вычисляет вероятность распознавания того, что другое транспортное средство распознает регулирование дорожного движения, и предсказывает, что другое транспортное средство выполняет смену полосы движения, в соответствии с упомянутой вероятностью распознавания, предсказываемым состоянием движения и фактическим состоянием движения.
Преимущественные эффекты
[0007]
Аспект настоящего изобретения может предотвратить ошибку и задержку в предсказании действия другого транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[Фиг. 1] Фиг. 1 - блок-схема, иллюстрирующая конфигурацию устройства предсказания действий другого транспортного средства согласно варианту осуществления.
[Фиг. 2] Фиг. 2 - это блок-схема, иллюстрирующая пример работы устройства предсказания действий другого транспортного средства, показанного на фиг. 1, в качестве способа предсказания действий другого транспортного средства согласно варианту осуществления.
[Фиг. 3A] Фиг. 3A - вид сверху, иллюстрирующий пример ситуации движения, в которой эффективно функционирует устройство помощи при вождении согласно варианту осуществления.
[Фиг. 3B] Фиг. 3B - вид сверху, иллюстрирующий состояние по истечении заданного периода времени из состояния, проиллюстрированного на фиг. 3A.
[Фиг. 4] Фиг. 4 - таблица, иллюстрирующая пример данных, на которые следует опираться при определении, выполняет ли другое транспортное средство 12 смену полосы движения в соответствии с величиной отклонения и вероятностью распознавания.
[Фиг. 5] Фиг. 5 - таблица, иллюстрирующая пример данных, на которые следует опираться при определении, выполняет ли другое транспортное средство 12 смену полосы движения в соответствии с несоответствием и вероятностью распознавания.
[Фиг. 6] Фиг. 6 - таблица, иллюстрирующая пример данных, на которые следует опираться при вычислении вероятности P смены полосы движения в соответствии с вероятностью Pd смены полосы движения и вероятностью R распознавания.
Описание вариантов осуществления
[0009]
Ниже будет описан вариант осуществления со ссылкой на чертежи.
[0010]
Устройство помощи при вождении согласно варианту осуществления эффективно функционирует в ситуации, показанной, например, на фиг. 3A и фиг. 3B. Фиг. 3A и фиг. 3B иллюстрируют ситуацию на дороге с односторонним движением, имеющей две полосы движения (G1 и G2), в которой рассматриваемое транспортное средство 11 движется по левой полосе G1 движения (собственная полоса движения), а другое транспортное средство 12 движется параллельно по правой полосе G2 движения (смежная полоса движения), примыкающей к собственной полосе движения. Левая полоса G1 движения представляет собой полосу движения, которая непрерывно идет прямо перед рассматриваемым транспортным средством 11. Правая полоса G2 движения - это полоса движения, изогнутая вправо перед другим транспортным средством 12, которая является «полосой для поворота направо». Левая полоса G1 движения и правая полоса G2 движения образуют дорогу, разветвляющуюся в разных направлениях перед рассматриваемым транспортным средством 11 и другим транспортным средством 12.
[0011]
Предполагается, что как рассматриваемое транспортное средство 11, так и другое транспортное средство 12 намереваются продолжать движение прямо по дороге в этой ситуации. В то время как рассматриваемое транспортное средство 11 движется по левой полосе G1 движения в соответствии с намерением, другое транспортное средство 12 движется по правой полосе G2 движения, которая является полосой для поворота направо впереди другого транспортного средства 12, вопреки намерению продолжать движение прямо. Другому транспортному средству 12, таким образом, необходимо произвести смену полосы движения с правой полосы G2 движения в данный момент, на левую полосу G1 движения, чтобы продолжать движение прямо по дороге.
[0012]
В ситуации движения, проиллюстрированной на фиг. 3A и фиг. 3B, другое транспортное средство 12 может находиться либо в состоянии автономного вождения, либо в состоянии ручного вождения. Термин «автономное вождение» относится к режиму вождения, в котором заранее определенное устройство управления движением транспортного средства независимо выполняет часть или все из распознавания, определения и операции в отношении вождения транспортного средства. Термин «ручное вождение» относится к режиму вождения, в котором пассажир (человек) в качестве водителя в другом транспортном средстве 12 действует, чтобы управлять другим транспортным средством 12.
[0013]
Едущее впереди транспортное средство 13 движется по правой полосе G2 движения впереди другого транспортного средства 12. Дорожный указатель «стрелка 14 поворота вправо» напечатана на дорожном покрытии в правой полосе G2 движения. Стрелка 14 поворота вправо - это дорожный указатель регулирования дорожного движения, указывающий, что «направление движения по соответствующей полосе движения является правым, куда транспортные средства должны повернуть». Дорожный указатель представляет собой знак, обозначаемый линией, символом или буквами с дорожными шпильками, краской или камнями на поверхности дороги, чтобы показать правила или инструкции, касающиеся движения по соответствующей дороге.
[0014]
Другое транспортное средство 12 может не распознавать визуально или обнаруживать стрелку 14 поворота вправо впереди, потому что едущее впереди транспортное средство 13 движется по стрелке 14 поворота вправо или останавливается по стрелке 14 поворота вправо, как проиллюстрировано на фиг. 3A. Другое транспортное средство 12 в этом случае может не распознавать регулирование дорожного движения: «направление движения в правой полосе G2 движения является правым, куда транспортные средства должны повернуть при движении вперед по текущей полосе движения». Наличие множества едущих впереди транспортных средств 13 в очереди дополнительно увеличивает вероятность того, что другое транспортное средство 12 не сможет визуально распознать или обнаружить стрелку 14 поворота вправо.
[0015]
Другое транспортное средство 12 может визуально распознать или обнаружить стрелку 14 поворота вправо только после того, как едущее впереди транспортное средство 13 пройдет через стрелку 14 поворота вправо, как проиллюстрировано на фиг. 3B. А именно, другое транспортное средство 12, наконец, распознает регулирование дорожного движения: «направление движения по правой полосе G2 движения является правым, куда транспортные средства должны повернуть при движении вперед по текущей полосе». Состояние движения другого транспортного средства 12 (включая поведение транспортного средства) может измениться до и после распознавания регулирования дорожного движения. Например, другое транспортное средство 12 может совершить действие, приближаясь к границе полосы движения правой полосы G2 движения, что представляет собой изменение положения в пределах правой полосы G2 движения в направлении ширины полосы движения, или может произвести внезапное замедление, что является усилением замедления.
[0016]
Вариант осуществления проиллюстрирован ниже с устройством и способом обнаружения изменения в состоянии движения другого транспортного средства 12 и предсказания того, что другое транспортное средство 12 выполняет смену полосы движения с правой полосы G2 движения на левую полосу G1 движения с учетом вероятности распознавания, которая представляет собой вероятность того, что другое транспортное средство 12 распознает регулирование дорожного движения. Устройство и способ учитывают не только изменение состояния движения, но также вероятность распознавания, чтобы предотвратить ошибку и задержку в предсказании смены полосы движения. Ниже подробно описаны способ предсказания действий другого транспортного средства и устройство предсказания действий другого транспортного средства согласно варианту осуществления. Ситуация движения, проиллюстрированная на фиг. 3A и фиг. 3B, является примером, в котором способ предсказания действий другого транспортного средства и устройство предсказания действий другого транспортного средства согласно варианту осуществления эффективно функционируют, но не ограничивает технический объем изобретения, к которому применяются способ предсказания действий другого транспортного средства и устройство предсказания действий другого транспортного средства согласно варианту осуществления.
[0017]
Конфигурация устройства предсказания действий другого транспортного средства согласно варианту осуществления описывается ниже со ссылкой на фиг.1. Устройство предсказания действий другого транспортного средства включает в себя блок управления. Блок управления предсказывает смену полосы движения другого транспортного средства 12 со смежной полосы G2 движения на собственную полосу G1 движения перед рассматриваемым транспортным средством 11 в соответствии с поведением другого транспортного средства 12, движущегося по смежной полосе G2 движения. Блок управления включает в себя блок 102 обнаружения объектов, блок 101 оценки положения рассматриваемого транспортного средства, блок 104 получения информации регулирования дорожного движения и микрокомпьютер.
[0018]
Блок 102 обнаружения объектов включает в себя различные типы датчиков обнаружения объектов, такие как лазерный радар, радар миллиметрового диапазона, камеру и систему обнаружения и определения дальности с помощью света (лидар), установленные на рассматриваемом транспортном средстве 11 для обнаружения объектов вокруг рассматриваемого транспортного средства 11. Устройство 102 обнаружения объектов обнаруживает объекты вокруг рассматриваемого транспортного средства 11, используя несколько датчиков обнаружения объектов. Устройство 102 обнаружения объектов обнаруживает движущиеся объекты, такие как другие транспортные средства 12, включая двухколесные транспортные средства, легкие транспортные средства, включая велосипеды, и пешеходов, а также неподвижные объекты, такие как припаркованные транспортные средства. Например, устройство 102 обнаружения объектов определяет положение, ориентацию, размер, скорость, ускорение, замедление и скорость рыскания движущегося объекта или неподвижного объекта по отношению к рассматриваемому транспортному средству 11. Положение, ориентация (угол рыскания), размер, скорость, ускорение, замедление и скорость рыскания каждого объекта вместе именуются ниже «поведением». Когда объект является другим транспортным средством 12, блок 102 обнаружения объектов определяет фактическое состояние движения другого транспортного средства 12 (иногда просто называемое ниже «фактическое состояние движения») как поведение объекта.
[0019]
Блок 102 обнаружения объектов объединяет несколько результатов обнаружения, полученных соответствующими датчиками обнаружения объектов, и выводит один результат обнаружения для каждого объекта. В частности, блок 102 обнаружения вычисляет поведение объекта, которое является наиболее разумным и имеет наименьшую ошибку среди частей поведения объекта, обнаруженного соответствующими датчиками обнаружения объектов, с учетом характеристик ошибок соответствующих датчиков обнаружения объектов. Блок 102 обнаружения объектов совместно оценивает результаты обнаружения, полученные различными датчиками с помощью обычного метода объединения датчиков, чтобы получить более точный результат обнаружения для каждого объекта.
[0020]
Блок 102 обнаружения объектов отслеживает каждый обнаруженный объект. В частности, блок 102 обнаружения объектов определяет схожесть (совпадение) объекта, обнаруженного с интервалами, в соответствии с поведением объекта, выводимого в разное время, в соответствии с интегрированным результатом обнаружения, и предсказывает поведение объекта в соответствие с результатом сопоставления. Поведение объекта, выводимое в разное время, сохраняется в памяти в микрокомпьютере и используется для предсказания действий другого транспортного средства 12, как описано ниже.
[0021]
Блок 102 обнаружения объектов выводит в качестве результата обнаружения поведение двухмерного объекта в виде сверху, например, если смотреть с воздуха над рассматриваемым транспортным средством 11.
[0022]
Фактическое состояние движения другого транспортного средства 12 представлено одним значением или комбинацией двух или более значений, указывающих положение, включая абсолютное положение и относительное положение, ориентацию (угол рыскания), скорость, ускорение и путь движения другого транспортного средства 12. Путь движения другого транспортного средства 12 относится к последовательным положениям другого транспортного средства 12. Например, фактическое состояние движения, когда оно представлено комбинацией пути движения и скорости, включает в себя профиль положений другого транспортного средства 12 в разное время и профиль скоростей другого транспортного средства 12 в соответствующих положениях.
[0023]
В качестве альтернативы фактическое состояние движения другого транспортного средства 12 может быть представлено одним из или комбинацией двух или более состояний другого транспортного средства 12 относительно направления другого транспортного средства 12 относительно смежной полосы движения (правая полоса G2 движения) или собственной полосы движения (левая полоса G1 движения), положения другого транспортного средства 12 в смежной полосе движения в направлении ширины транспортного средства, скорости другого транспортного средства 12, ускорения другого транспортного средства 12 и замедления другого транспортного средства 12. Например, фактическое состояние движения может быть представлено состоянием другого транспортного средства 12, например «направление движения - по правой полосе G2 движения», «направление движения искривлено к левой полосе G1 движения», «положение в направление ширины полосы движения ближе к левой полосе G1 движения», «ускорение», «замедление» или «скорость постоянна».
[0024]
Блок 101 оценки положения рассматриваемого транспортного средства включает в себя датчик обнаружения положения, установленный на рассматриваемом транспортном средстве 11, такой как приемное устройство, которое принимает сигналы глобальной системы позиционирования (GPS), чтобы измерять положение (абсолютное положение) и ориентацию (абсолютную ориентацию) рассматриваемого транспортного средства 11 в географической системе координат. Блок 101 оценки положения рассматриваемого транспортного средства дополнительно включает в себя схему обработки вычислений, реализующую одометрию и точный расчет. В частности, блок 101 оценки положения рассматриваемого транспортного средства использует датчик скорости вращения колес для определения скорости вращения соответствующих колес рассматриваемого транспортного средства 11, датчик угла поворота рулевого колеса для обнаружения угла поворота рулевого колеса и схему обработки вычислений для измерения относительного положения, относительной ориентации и скорости рассматриваемого транспортного средства 11 относительно заданной контрольной точки. Информация об абсолютном положении, абсолютной ориентации, относительном положении и относительной ориентации рассматриваемого транспортного средства 11 называется «информацией о положении и ориентации рассматриваемого транспортного средства 11». Блок 101 оценки положения рассматриваемого транспортного средства может определять положение и ориентацию рассматриваемого транспортного средства 11 на карте из информации о положении и ориентации рассматриваемого транспортного средства 11. Карта обозначается картографическими данными, предварительно сохраненными в базе 111 картографических данных.
[0025]
Блок 104 получения информации регулирования дорожного движения получает информацию о правилах дорожного движения (информацию регулирования дорожного движения) относительно дороги вокруг рассматриваемого транспортного средства 11. Например, блок 104 получения информации регулирования дорожного движения получает информацию регулирования дорожного движения, касающуюся смежной полосы движения с левой или правой стороны от собственной полосы G1 движения впереди рассматриваемого транспортного средства 11. Блок 104 получения информации регулирования дорожного движения также может получать информацию регулирования дорожного движения впереди другого транспортного средства 12 в отношении смежной полосы движения (правая полоса G2 движения), по которой движется другое транспортное средство 12, которая является целью для определения смены полосы движения. Когда цель для определения смены полосы движения еще не указана, блок 104 получения информации регулирования дорожного движения может получать информацию регулирования дорожного движения, касающуюся смежных полос движения по обе стороны от собственной полосы G1 движения, вместо конкретной полосы движения. Картографические данные, хранящиеся в базе 111 картографических данных, включают в себя данные о структуре дороги, имеющей собственную полосу G1 движения и смежную полосу G2 движения, и данные о структуре соответствующих полос движения дороги. Информация регулирования дорожного движения, относящаяся к собственной полосе G1 движения и смежной полосе G2 движения, связанная со структурой дороги, также сохраняется в базе 111 картографических данных.
[0026]
База 111 картографических данных может быть установлена в рассматриваемом транспортном средстве 11 или не обязательно установлена в рассматриваемом транспортном средстве 11. Когда база 111 картографических данных не установлена в рассматриваемом транспортном средстве 11, блок 104 получения информации регулирования дорожного движения может получать картографические данные и информацию регулирования дорожного движения извне посредством связи между транспортными средствами (vehicle-to-vehicle communications) или связи между транспортными средствами и дорожной инфраструктурой (road-to-vehicle communications) в интеллектуальной транспортной системе (ITS) или универсальных системах управления трафиком (UTMS), или мобильной связи, такой как 3G и LTE.
[0027]
Блок 104 получения информации регулирования дорожного движения может распознавать дорожные указатели, указывающие правила дорожного движения или инструкции, напечатанные на поверхности дороги, из изображений вокруг рассматриваемого транспортного средства 11, полученных с использованием камеры, включенной в блок 102 обнаружения объектов. Блок 104 получения информации регулирования дорожного движения может распознавать дорожные знаки, размещенные вдоль дороги, по изображениям вокруг рассматриваемого транспортного средства 11. Блок 104 получения информации регулирования дорожного движения может распознавать границы полос движения, напечатанные на поверхности дороги, по изображениям вокруг рассматриваемого транспортного средства 11, чтобы получить структуру полосы движения.
[0028]
Микрокомпьютер предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, в соответствии с результатом обнаружения, полученным блоком 102 обнаружения объектов, результатом оценки, полученным блоком 101 оценки положения рассматриваемого транспортного средства, и информацией обнаружения, полученной посредством блока 104 получения информации регулирования дорожного движения.
[0029]
Микрокомпьютер - это многоцелевой микрокомпьютер, включающий в себя центральный процессор (ЦП), память, такую как RAM и ROM, и блок ввода/вывода. Компьютерная программа (программа предсказания действий другого транспортного средства) установлена на микрокомпьютере, чтобы функционировать как часть устройства предсказания действий другого транспортного средства. Микрокомпьютер функционирует как множество схем обработки информации (103, 105, 106, 107 и 108), включенных в устройство предсказания действий другого транспортного средства, когда выполняется компьютерная программа. Вариант осуществления проиллюстрирован на примере, в котором программное обеспечение установлено для изготовления множества схем обработки информации (103, 105-108), включенных в устройство предсказания действий другого транспортного средства. В качестве альтернативы, специализированное оборудование для выполнения каждой обработки информации, как описано ниже, может быть подготовлено для составления схем обработки информации (103, 105-108). Соответствующие схемы обработки информации (103, 105-108) могут состоять из отдельных аппаратных средств. Схемы обработки информации (103, 105-108) также могут служить в качестве электронного блока управления (ECU), используемого для выполнения другой обработки управления, относящейся к рассматриваемому транспортному средству 11. Настоящий вариант осуществления проиллюстрирован на примере случая, в котором микрокомпьютер также реализует схемы (109 и 110) обработки информации для выполнения автономного вождения рассматриваемого транспортного средства 11 в соответствии с результатами предсказания действий других транспортных средств.
[0030]
Микрокомпьютер включает в себя, в качестве соответствующих схем обработки информации (103 и 105-110), блок 103 формирования вероятности действия, блок 105 вывода правил, блок 106 вычисления вероятности распознавания, блок 107 обнаружения изменения состояния движения, блок 108 принятия решения о предсказываемом действии, блок 109 формирования маршрута рассматриваемого транспортного средства и блок 110 управления транспортным средством.
[0031]
Блок 103 формирования вероятности действия предсказывает вероятность действия, которое другое транспортное средство 12 предпримет в ближайшем будущем, в соответствии со структурой дороги и структурой полосы движения. Вероятность действия, предсказанная блоком 103 формирования вероятности действия, включает в себя смену полосы движения. Блок 103 формирования вероятности действия предсказывает, как другое транспортное средство 12 движется далее как намерение действия в соответствии со структурой дороги и структурой полосы движения, к которой принадлежит другое транспортное средство 12, и вычисляет основной курс другого транспортного средства 12 на основе намерения действия. Используемый здесь термин «вероятность действия» относится к вышестоящему понятию, включая намерение действия и основной курс. Термин «основной курс» охватывает профиль положений другого транспортного средства 12 в разное время, а также профиль скоростей другого транспортного средства 12 в соответствующих положениях.
[0032]
Например, блок 103 формирования вероятности действия предсказывает намерение действия, которое другое транспортное средство 12 предпримет, чтобы продолжить движение по смежной полосе движения (правая полоса G2 движения), чтобы вычислить основной курс движения по правой полосе G2 движения, как показано на фиг. 3A. Блок 103 формирования вероятности действия также предсказывает намерение действия, которое другое транспортное средство 12 предпримет, чтобы выполнить смену полосы движения со смежной полосы движения (правая полоса G2 движения) на собственную полосу движения (левая полоса G1 движения) впереди рассматриваемого транспортного средства 11. Затем блок 103 формирования вероятности действия вычисляет основной курс для выполнения смены полосы движения с правой полосы G2 движения на левую полосу G1 движения впереди рассматриваемого транспортного средства 11.
[0033]
Как используется в настоящем варианте осуществления, «смена полосы движения» охватывает смену полосы движения в ситуации движения, в которой никакие транспортные средства не находятся в линии на собственной полосе G1 движения перед рассматриваемым транспортным средством 11, что называется «нормальной сменой полосы движения», как показано на фиг. 3A. «Смена полосы движения» также включает в себя действие по вклиниванию в линию в ситуации движения, в которой транспортные средства присутствуют в линии на собственной полосе G1 движения перед рассматриваемым транспортным средством 11, что называется «вклиниванием». Термин «вклинивание» имеет то же значение, что и термин «вклинивание между машинами».
[0034]
Когда блок 104 получения информации регулирования дорожного движения получает регулирование дорожного движения в отношении смежной полосы движения (правая полоса G2 движения) впереди другого транспортного средства 12 (в точке, в которую другое транспортное средство прибывает позже), блок 105 вывода правил предсказывает «предсказываемое состояние движения» как правило, которое представляет собой состояние движения, в котором другое транспортное средство 12 движется в соответствии с регулированием дорожного движения впереди другого транспортного средства 12. «Предсказываемое состояние движения» другого транспортного средства 12 относится к состоянию движения для действия, которое предположительно выполняет другое транспортное средство 12, когда другое транспортное средство 12 движется в соответствии с регулированием дорожного движения в отношении смежной полосы движения впереди другого транспортного средства 12. Термин «регулирование дорожного движения» в следующих пояснениях относится к регулированию дорожного движения впереди другого транспортного средства 12.
[0035]
Предсказываемое состояние движения другого транспортного средства 12 может быть представлено значением или комбинацией значений, как в случае фактического состояния движения. В частности, предсказываемое состояние движения представлено одним значением или комбинацией двух или более значений, указывающих положение, включая абсолютное положение и относительное положение, ориентацию (угол рыскания), скорость, ускорение и путь движения другого транспортного средства 12. Например, предсказываемое состояние движения, когда оно представлено комбинацией пути движения и скорости, включает в себя профиль положений другого транспортного средства 12 в разное время и профиль скоростей другого транспортного средства 12 в соответствующих положениях.
[0036]
В качестве альтернативы, предсказываемое состояние движения другого транспортного средства 12 может быть представлено одним или комбинацией состояний другого транспортного средства 12 относительно направления другого транспортного средства 12 относительно смежной полосы движения (правая полоса G2 движения) или собственной полосы движения (левая полоса G1 движения), положения другого транспортного средства 12 в смежной полосе движения в направлении ширины транспортного средства, скорости другого транспортного средства 12, ускорения другого транспортного средства 12 и замедления другого транспортного средства 12.
[0037]
Блок 105 вывода правил может предсказывать предсказываемое состояние движения в соответствии с информацией регулирования дорожного движения, структурой дороги смежной полосы движения (G2) и установленной скоростью на дороге смежной полосы движения (G2). В частности, блок 105 вывода правил вычисляет предсказываемое состояние движения, в котором другое транспортное средство 12 поворачивает вправо примерно на 90 градусов вдоль формы правой полосы G2 движения в соответствии с регулированием полосы для поворота направо (пример регулирования дорожного движения) и формой смежной полосы движения (G2), изогнутой вправо перед другим транспортным средством 12 (пример структур дороги).
[0038]
В качестве альтернативы, блок 105 вывода правил может выбирать предсказываемое состояние движения из множества вероятностей действия, сформированных блоком 103 формирования вероятности действия. Блок 105 вывода правил может предсказывать профиль скоростей другого транспортного средства 12, принимая во внимание установленную скорость на дороге смежной полосы движения (G2).
[0039]
Блок 106 вычисления вероятности распознавания вычисляет «вероятность распознавания», указывающую вероятность того, что другое транспортное средство 12 распознает правила дорожного движения. Используемый здесь термин «правила дорожного движения» включает в себя по меньшей мере регулирование дорожного движения в отношении смежной полосы движения (правой полосы G2 движения). А именно, блок 106 вычисления вероятности распознавания вычисляет в качестве «вероятности распознавания» вероятность того, что другое транспортное средство 12 распознает регулирование дорожного движения в отношении текущей полосы движения (G2). Вероятность распознавания не обязательно должна быть напрямую связана с тем фактом, что рассматриваемое транспортное средство 11, а именно блок 104 получения информации регулирования дорожного движения, получает регулирование дорожного движения в отношении смежной полосы движения (правая полоса G2 движения), поскольку вероятность распознавания указывает вероятность относительно распознавания другого транспортного средства 12. Конечно, вероятность относительно распознавания рассматриваемого транспортного средства 11 может быть связана с «вероятностью распознавания» другого транспортного средства 12, как описано ниже.
[0040]
Например, блок 106 вычисления вероятности распознавания может вычислить вероятность распознавания с использованием максимального диапазона распознавания и частичного диапазона распознавания, которые являются примерами нескольких диапазонов распознавания. Термин «максимальный диапазон распознавания», используемый здесь, означает максимальный диапазон, позволяющий другому транспортному средству 12 распознавать регулирование дорожного движения, рассчитанное в соответствии с визуальными характеристиками человека (например, зрение типичного водителя) в случае, когда другое транспортное средство 12 движется посредством ручного вождения. Когда другое транспортное средство 12 движется посредством автономного вождения, максимальный диапазон распознавания - это максимальный диапазон, позволяющий распознавать регулирование дорожного движения, рассчитанное в соответствии с диапазоном считывания (восприятия) соответствующих датчиков обнаружения объектов, установленных на другом транспортном средстве 12. Максимальный диапазон распознавания - это диапазон, определяемый в зависимости от расстояния от другого транспортного средства 12, который может быть диапазоном круга вокруг рассматриваемого транспортного средства 12, имеющего радиус, который представляет собой расстояние (обозначенное как La, показанное на фиг. 3A), определяемое в зависимости от визуальных характеристик человека, например.
[0041]
Термин «частичный диапазон распознавания» представляет собой диапазон, позволяющий другому транспортному средству 12 распознавать регулирование дорожного движения, рассчитанное в соответствии с высотой другого транспортного средства 12 и условиями движения другого транспортного средства 12. Например, объект вокруг другого транспортного средства 12 (пример условий движения) может блокировать дорожную структуру, позволяющую распознавать регулирование дорожного движения, или метку, указывающую регулирование дорожного движения, такую как дорожный знак, из-за небольшой высоты другого транспортного средства 12. Другое транспортное средство 12 в этом случае не может визуально распознать или обнаружить дорожную структуру или метку, чтобы не распознать регулирование дорожного движения. Блок 106 вычисления вероятности распознавания, таким образом, принимает во внимание высоту другого транспортного средства 12 и условия движения для вычисления частичного диапазона распознавания, чтобы не включать заблокированную метку, указывающую регулирование дорожного движения (присутствует в мертвой зоне). Например, как обозначено областью Lb, показанной на фиг. 3A, другое транспортное средство 12 может распознавать регулирование дорожного движения в диапазоне считывания под заранее определенным углом. Другое транспортное средство 12, однако, не может распознавать или обнаруживать регулирование дорожного движения в области, заблокированной едущим впереди транспортным средством 13, которая является мертвой зоной другого транспортного средства 12. Когда высота другого транспортного средства 12 достаточно выше, чем высота едущего впереди транспортного средства 13, область впереди едущего впереди транспортного средства 13 в направлении движения не является мертвой зоной другого транспортного средства 12. Таким образом, частичный диапазон распознавания в таком случае шире, чем область Lb, показанная на фиг. 3A. Таким образом, частичный диапазон Lb распознавания может быть вычислен в соответствии с высотой другого транспортного средства 12 и условиями движения другого транспортного средства 12 (присутствием едущего впереди транспортного средства 13). «Частичный диапазон распознавания» может быть уменьшен вокруг объекта (блокирующего объекта), сужая диапазон распознавания, чтобы не вызвать ошибку в обнаружении объекта. В качестве альтернативы, вероятность распознавания может быть рассчитана в соответствии со степенью блокировки диапазона считывания, заблокированного блокирующим объектом (отношение диапазона считывания соответствующих датчиков обнаружения объектов в случае присутствия блокирующего объекта к диапазону считывания соответствующих датчиков обнаружения объектов в случае отсутствия блокирующего объекта). Например, вероятность R1 распознавания может быть рассчитана равной 0,8, когда степень блокировки диапазона считывания, заблокированного едущим впереди транспортным средством 13 (пример блокирующего объекта), показанного на фиг. 3A, составляет 20%.
[0042]
Блок 106 вычисления вероятности распознавания может вычислять вероятность распознавания несколькими видами способов, используя максимальный диапазон распознавания (круг, имеющий радиус La) и частичный диапазон Lb распознавания. Конкретные примеры вычислений проиллюстрированы ниже с помощью первого стандарта вычислений до пятого стандарта вычислений.
[0043]
(Первый стандарт вычислений)
Блок 106 вычисления вероятности распознавания может получить более высокую вероятность распознавания в случае, когда дорожная структура, позволяющая распознавать регулирование дорожного движения, или метка, указывающая регулирование дорожного движения, включена как в максимальный диапазон распознавания, так и в частичный диапазон распознавания, чем в случай, когда дорожная конструкция или метка не входят в максимальный диапазон распознавания или в частичный диапазон распознавания. Выражение «дорожная структура или метка не входит в максимальный диапазон распознавания или в частичный диапазон распознавания» включает случай, когда дорожная структура или метка включены только в один из максимального диапазона распознавания и частичного диапазона распознавания, а также случай, когда дорожная структура или метка не включены ни в максимальный диапазон распознавания, ни в частичный диапазон распознавания. «Дорожная структура, позволяющая распознать регулирование дорожного движения» включает границы полос движения. Например, блок 106 вычисления вероятности распознавания может распознавать регулирование дорожного движения в соответствии с формой границ полосы движения, такой как прямая, правая кривая и левая кривая, или в соответствии с типом границ полосы движения, например белая прерывистая линия, белая сплошная линия и желтая сплошная линия. «Метка, указывающая регулирование дорожного движения» включает в себя указание движения, такое как краска на поверхности дороги перед другим транспортным средством 12, дорожный указатель (включая дорожный знак) и вывеску для указаний, предупреждающих надписей или инструкций в зависимости от состояния дороги или движения. Дорожный указатель включает в себя регулирующий знак для информации о регулировании, таком как приостановление или ограничение проезда, и вспомогательный знак для дополнительной информации о причине установки знака (например, тип транспортного средства, время и участок).
[0044]
(Второй стандарт вычислений)
Блок 106 вычисления вероятности распознавания может получить более высокую вероятность распознавания в случае, когда либо дорожная структура, позволяющая распознавать регулирование дорожного движения, либо метка, указывающая регулирование дорожного движения, полностью включена в максимальный диапазон распознавания или частичный диапазон распознавания, чем в в случае, когда дорожная структура или метка частично включены в максимальный диапазон распознавания или в частичный диапазон распознавания. Например, когда часть стрелки 14 поворота вправо закрыта от обзора едущим впереди транспортным средством 13, как показано на фиг. 3A, стрелка 14 поворота вправо частично входит в частичный диапазон распознавания. Когда стрелка 14 поворота вправо не скрыта едущим впереди транспортным средством 13, как показано на фиг. 3B, стрелка 14 поворота вправо полностью входит в частичный диапазон Lb распознавания. Таким образом, вероятность распознавания в дорожной ситуации, показанной на фиг. 3B, выше, чем вероятность распознавания в дорожной ситуации, проиллюстрированной на фиг. 3A.
[0045]
(Третий стандарт вычислений)
Блок 106 вычисления вероятности распознавания получает более высокую вероятность распознавания, когда расстояние от другого транспортного средства 12 до дорожной структуры, позволяющей распознавать регулирование дорожного движения, или метки, указывающей регулирование дорожного движения, короче. Вероятность распознавания другого транспортного средства 12 увеличивается, когда объект, позволяющий распознавать регулирование дорожного движения, находится близко, по сравнению со случаем, когда объект находится далеко. Например, вероятность распознавания R2 может быть рассчитана равной 0,9, когда расстояние составляет пять метров, и вероятность распознавания R2 может быть рассчитана равной 0,8, когда расстояние составляет восемь метров.
[0046]
Описанные выше стандарты вычислений с первого по третий можно использовать независимо или комбинировать при необходимости. Например, блок 106 вычисления вероятности распознавания может вычислить вероятность R распознавания путем интегрирования вероятности R1 распознавания на основе степени блокировки диапазона считывания и вероятности распознавания R2 на основе расстояния согласно формуле (1), где α1 и β1 - это весовые коэффициенты, а K+1 - поправочный член, в котором K равно нулю или положительному числу. Когда каждый из α1, β1 и K равен единице, вероятность R1 распознавания и вероятность R2 распознавания могут быть взвешены одинаково. Вероятность R распознавания может быть получена из предварительно разработанного распределения, такого как функция плотности вероятности нормального распределения.
[0047]
[Мат. 1]
[0048]
(Четвертый стандарт вычислений)
Блок 106 вычисления вероятности распознавания может получить вероятность распознавания, используя в качестве максимального диапазона распознавания или частичного диапазона распознавания диапазон распознавания рассматриваемого транспортного средства, позволяющий рассматриваемому транспортному средству 11 распознавать регулирование дорожного движения. А именно, диапазон, который может распознать рассматриваемое транспортное средство 11, может быть заменен максимальным диапазоном распознавания или частичным диапазоном распознавания другого транспортного средства 12, чтобы вычислить вероятность распознавания. Четвертый стандарт вычислений может быть реализован в сочетании с первым-третьим стандартами вычислений.
[0049]
(Пятый стандарт вычислений)
Блок 106 вычисления вероятности распознавания может получить вероятность распознавания в соответствии с дорожной структурой, позволяющей распознавать регулирование дорожного движения, или меткой, указывающей регулирование дорожного движения, фактически обнаруженными рассматриваемым транспортным средством 11. Вероятность распознавания может быть вычислена, исходя из предположения, что другое транспортное средство 12 могло бы обнаруживать дорожную структуру или метку, которую фактически обнаружило рассматриваемое транспортное средство 11. Пятый стандарт вычислений может быть реализован в сочетании с первым-четвертым стандартами вычислений.
[0050]
Блок 107 обнаружения изменения состояния движения обнаруживает изменение фактического состояния движения, обнаруженное блоком 102 обнаружения объектов. В частности, блок 107 обнаружения изменения состояния движения может обнаружить, что фактическое состояние движения изменилось, когда существует разница, равная первому опорному значению или больше, между фактическими состояниями движения в двух разных моментах времени. Блоку 107 обнаружения изменения состояния движения не требуется определять изменение фактического состояния движения, когда нет никакой разницы, равной первому опорному значению или больше, между фактическими состояниями движения в два разных момента времени.
[0051]
В качестве альтернативы, блок 107 обнаружения изменения состояния движения может обнаружить, что фактическое состояние движения изменилось, когда существует разница, равная второму опорному значению или больше, между величиной изменения в фактических состояниях движения в единицу времени в двух различных моментах времени. Блоку 107 обнаружения изменения состояния движения не требуется определять изменение фактического состояния движения, когда нет разницы, равной второму опорному значению или больше, между величинами изменений в фактических состояниях движения в единицу времени в двух различных моментах времени. Как описано выше, блок 107 обнаружения изменения состояния движения может определить, изменилось ли фактическое состояние движения, в соответствии со сравнением между фактическими состояниями движения в двух разных моментах времени или сравнением между величинами изменения в фактических состояниях движения в единицу времени в двух разных моментах времени.
[0052]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения в соответствии с вероятностью распознавания, вычисленной блоком 106 вычисления вероятности распознавания, предсказываемым состоянием движения, предсказываемым блоком 105 вывода правил, и изменением фактического состояние движения. «Изменение фактического состояния движения» обнаруживается блоком 107 обнаружения изменения состояния движения. В частности, блок 102 обнаружения объектов получает фактическое состояние движения, когда блок 107 обнаружения изменения состояния движения обнаруживает, что фактическое состояние движения изменилось. «Фактическое состояние движения», полученное блоком 102 обнаружения объектов, проиллюстрировано ниже двумя примерами (первый пример и второй пример).
[0053]
(Первый пример)
Блок 102 обнаружения объектов получает фактическое состояние движения после изменения в качестве фактического состояния движения. Как описано выше, фактическое состояние движения после изменения представлено одним значением или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства 12. Фактическое состояние движения после изменения не обязательно представлено числовым значением, но может быть представлено состоянием, связанным с числовым значением.
[0054]
(Второй пример)
Блок 102 обнаружения объектов получает информацию об изменении, которая является информацией об изменении состояния движения. Информация об изменении может быть представлена одним значением или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства 12. В качестве альтернативы, информация об изменении может быть представлена одним или комбинацией двух или более состояний другого транспортного средства 12 относительно направления другого транспортного средства 12 по отношению к смежной полосе G2 движения или собственной полосе G1 движения, положения другого транспортного средства 12 в смежной полосе G2 в движения направлении ширины транспортного средства, скорости другого транспортного средства 12, ускорения другого транспортного средства 12 и замедления другого транспортного средства 12.
[0055]
Блок 108 принятия решения о предсказываемом действии сравнивает предсказываемое состояние движения, которое представляет собой состояние движения другого транспортного средства во время движения в соответствии с регулированием дорожного движения (которое является состоянием движения, когда не выполняется смена полосы движения), с фактическим состоянием движения и предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, в соответствии с результатом сравнения и вероятностью распознавания. «Результат сравнения» проиллюстрирован ниже тремя примерами (с третьего по пятый).
[0056]
(Третий пример)
Блок 108 принятия решения о предсказываемом действии сравнивает предсказываемое состояние движения и фактическое состояние движения и вычисляет величину отклонения фактического состояния движения в направлении, не соответствующем предсказываемому состоянию движения. Выражение «величина отклонения фактического состояния движения в направлении, не соответствующем предсказываемому состоянию движения» выглядит следующим образом. Например, как проиллюстрировано на фиг. 3A, когда другое транспортное средство 12 движется по правой полосе G2 движения, блок 105 вывода правил предсказывает предсказываемый путь движения как предсказываемое состояние движения при движении в середине правой полосы G2 движения в направление ширины транспортного средства. Когда фактический путь движения (пример фактического состояния движения), обнаруженный блоком 102 обнаружения объектов, смещается вправо от предсказываемого пути движения, фактическое состояние движения определяется как смещенное в направлении, соответствующем предсказываемому пути движения, изогнутому вправо. Когда фактический путь движения, обнаруженный блоком 102 обнаружения объектов, смещается влево от предсказанного пути движения, фактическое состояние движения определяется как отклонение в направлении, не следующем за предсказанным путем движения, изогнутым вправо. В ситуации движения, проиллюстрированной на фиг. 3A, блок 108 принятия решения о предсказываемом действии вычисляет величину отклонения фактического пути движения, отклоняющегося от предсказываемого пути движения влево, как «величину отклонения фактического состояния движения в направлении, несоответствующем предсказываемому состоянию движения». «Величина отклонения фактического состояния движения в направлении, не соответствующем предсказываемому состоянию движения» равна нулю, когда фактический путь движения смещается вправо от предсказанного пути движения в ситуации движения, проиллюстрированной на фиг. 3A. А именно, величина отклонения равна нулю на полосе поворота вправо независимо от смещения вправо от середины полосы движения в направлении ширины транспортного средства.
[0057]
Блок 108 принятия решения о предсказываемом действии определяет, выполняет ли другое транспортное средство 12 смену полосы движения, в соответствии с величиной отклонения и вероятностью распознавания, обращаясь, например, к таблице, показанной на фиг.4. В частности, блок 108 принятия решения о предсказываемом действии предварительно устанавливает пороговые значения (Tha1, Tha2, Thb1, Thb2) для каждого из величины отклонения и вероятности распознавания и определяет, выполняет ли другое транспортное средство 12 смену полосы движения согласно сравнению величины отклонения и вероятности распознавания с соответствующими пороговыми значениями при обращении к таблице, показанной на фиг. 4. Числовое значение «1» на фиг. 4 указывает, что другое транспортное средство 12 выполняет смену полосы движения, а числовое значение «0» указывает, что другое транспортное средство 12 не выполняет смену полосы движения.
[0058]
Пороговое значение Thb1, установленное для вероятности распознавания, больше порогового значения Thb2. Соответствующие пороговые значения Thb1 и Thb2 предварительно устанавливаются таким образом, чтобы определить, что «вероятность распознавания высока (вероятность того, что другое транспортное средство распознает, высокая)», когда вероятность распознавания превышает пороговое значение Thb1, определяют, что «вероятность распознавания является возможной (существует вероятность того, что другое транспортное средство распознает)», когда вероятность распознавания превышает пороговое значение Thb2, и определяют, что «вероятность распознавания низкая (вероятность того, что другое транспортное средство не распознает, высокая)», когда вероятность распознавания меньше или равна пороговому значению Thb2.
[0059]
Пороговое значение Tha1, установленное для величины отклонения, превышает пороговое значение Tha2. Соответствующие пороговые значения Tha1 и Tha2 предварительно устанавливаются таким образом, чтобы определить, что «величина отклонения велика», когда величина отклонения превышает пороговое значение Tha1, определить, что «величина отклонения подтверждена (отклонение вызвано)», когда величина отклонения превышает пороговое значение Tha2, и определяют, что «величина отклонения не подтверждена (нет отклонения)», когда величина отклонения меньше или равна пороговому значению Tha2.
[0060]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания больше порогового значения Thb1 (первое пороговое значение) и величина отклонения больше порогового значения Tha2 (второе пороговое значение). Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания меньше или равна пороговому значению Thb1 (первое пороговое значение), но величина отклонения больше порогового значения Tha1 (третье пороговое значение). Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 не выполняет смену полосы движения, когда вероятность распознавания меньше или равна пороговому значению Thb1 (первое пороговое значение), а величина отклонения меньше или равна пороговому значению Tha1 (третье пороговое значение).
[0061]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство выполняет смену полосы движения, когда величина отклонения велика (величина отклонения превышает пороговое значение Tha1), независимо от вероятности распознавания, и предсказывает, что другое транспортное средство выполняет смену полосы движения, когда величина отклонения обнаружена, независимо от того, является ли величина отклонения небольшой (когда величина отклонения больше порогового значения Tha2) в случае, когда вероятность распознавания высока (вероятность распознавания больше порогового значения Thb1). Блок 108 принятия решения о предсказываемом действии не предсказывает смену полосы движения другого транспортного средства, когда величина отклонения не подтверждена (величина отклонения меньше или равна пороговому значению Tha2), независимо от вероятности распознавания. Блок 108 принятия решения о предсказываемом действии не предсказывает смену полосы движения другого транспортного средства, когда величина отклонения подтверждена, но не велика (когда величина отклонения больше порогового значения Tha2, но меньше или равна пороговому значению Tha1) в случае, когда вероятность распознавания невысока (вероятность распознавания меньше или равна пороговому значению Thb1). А именно, блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство выполняет смену полосы движения, когда величина отклонения велика (величина отклонения превышает пороговое значение Tha1), независимо от вероятности распознавания, и предсказывает, что другое транспортное средство выполняет смену полосы движения, когда величина отклонения мала, но по меньшей мере обнаружена (когда величина отклонения больше порогового значения Tha2), когда вероятность распознавания высока (вероятность распознавания больше порогового значения Thb1).
[0062]
Когда два или более значений объединяются для представления фактического состояния движения или предсказываемого состояния движения, соответствующие значения предпочтительно сравниваются с пороговыми значениями в соответствии с таблицей, показанной на фиг.4. Результаты определения для соответствующих значений могут быть интегрированы, чтобы определить, выполняет ли другое транспортное средство смену полосы движения.
[0063]
(Четвертый пример)
Блок 108 принятия решения о предсказываемом действии сравнивает предсказываемое состояние движения, которое является состоянием движения другого транспортного средства при движении в соответствии с регулированием дорожного движения (состояние движения, когда не выполняется смена полосы движения), с фактическим состоянием движения другого транспортного средства, и вычисляет расхождение в фактическом состоянии движения в направлении, несоответствующем предсказываемому состоянию движения. Например, блок 108 принятия решения о предсказываемом действии может вычислить несоответствие d согласно формуле (2), где v - фактическое состояние движения, r - предсказываемое состояние движения, а μ и σ - заранее определенные константы. Например, каждый из μ и σ представляет собой среднее значение или стандартное отклонение разностей между предсказываемым состоянием движения и фактическим состоянием движения. Блок 108 принятия решения о предсказываемом действии вычисляет значение, стандартизированное согласно формуле (2), как несоответствие d.
[0064]
[Мат. 2]
[0065]
Ниже приводится объяснение случая, в котором предсказываемое состояние движения и фактическое состояние движения, каждое, представлены одним из или комбинацией двух или более состояний другого транспортного средства 12 относительно направления другого транспортного средства 12 по отношению к смежной полосе G2 движения или собственной полосе G1 движения, положения другого транспортного средства 12 в смежной полосе G2 движения в направлении ширины транспортного средства, скорости другого транспортного средства 12, ускорения другого транспортного средства 12 и замедления другого транспортного средства 12. Блок 108 принятия решения о предсказываемом действии может вычислить как несоответствие (расхождение), соответствуют ли предсказываемое состояние движения и фактическое состояние движения друг другу. В частности, блок 108 принятия решения о предсказываемом действии определяет как несоответствие, соответствуют ли состояния, представляющие предсказываемое состояние движения и фактическое состояние движения, друг другу или отличаются друг от друга. Когда предсказываемое состояние движения и фактическое состояние движения представлены комбинацией двух или более состояний, блок 108 принятия решения о предсказываемом действии может определять расхождение для каждого из состояний и интегрировать результаты определения несоответствия для соответствующих состояний, чтобы получить единственное несоответствие. Несоответствие может определяться множеством уровней. Например, в случае, когда предсказываемое состояние движения (степень ускорения) является «замедлением», несоответствие может быть установлено на «1», когда фактическое состояние движения (степень ускорения) является «ускорением», несоответствие может быть установлено на «0,5», когда фактическое состояние движения - «медленное движение», и несоответствие может быть установлено на «0», когда фактическое состояние движения - «замедление».
[0066]
Блок 108 принятия решения о предсказываемом действии затем определяет, выполняет ли другое транспортное средство 12 смену полосы движения, в соответствии с упомянутым несоответствием и вероятностью распознавания, обращаясь, например, к таблице, показанной на фиг.5. В частности, блок 108 принятия решения о предсказываемом действии предварительно устанавливает пороговые значения (Thd1, Thd2, Thb1, Thb2) для каждого из несоответствия и вероятности распознавания. Блок 108 принятия решения о предсказываемом действии определяет, выполняет ли другое транспортное средство 12 смену полосы движения, согласно сравнению несоответствия и вероятности распознавания с соответствующими пороговыми значениями, обращаясь к таблице, показанной на фиг.5. Числовое значение «1» на фиг. 5 указывает, что другое транспортное средство 12 выполняет смену полосы движения, а числовое значение «0» указывает, что другое транспортное средство 12 не выполняет смену полосы движения. Соответствующие пороговые значения Thb1 и Thb2 вероятности распознавания предварительно устанавливаются, чтобы определить, «высока ли вероятность распознавания» или «вероятность распознавания низкая», как описано выше. Соответствующие пороговые значения Thd1 и Thd2 несоответствия предварительно устанавливаются таким образом, чтобы определить, что «несоответствие велико (различие большое)», когда несоответствие превышает пороговое значение Thd1, и определить, что «несоответствие подтверждено (разница вызвана)», когда несоответствие превышает пороговое значение Thd2.
[0067]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания больше порогового значения Thb1 (четвертое пороговое значение), а несоответствие больше порогового значения Thd2 (пятое пороговое значение). Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания меньше или равна пороговому значению Thb1 (четвертое пороговое значение), но несоответствие больше порогового значения Thd1 (шестое пороговое значение). Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 не выполняет смену полосы движения, когда вероятность распознавания меньше или равна пороговому значению Thb1, а несоответствие меньше или равно пороговому значению Thd1.
[0068]
Блок 108 принятия решения с предсказываемым действием предсказывает, что другое транспортное средство выполняет смену полосы движения, когда несоответствие велико (несоответствие превышает пороговое значение Thd1), независимо от вероятности распознавания, и предсказывает, что другое транспортное средство выполняет смену полосы движения, когда несоответствие обнаруживается независимо от того, является ли несоответствие небольшим (когда несоответствие превышает пороговое значение Thd2) в случае, когда вероятность распознавания высока. Блок 108 принятия решения о предсказываемом действии не предсказывает смену полосы движения другого транспортного средства, когда несоответствие не подтверждено (несоответствие меньше или равно пороговому значению Thd2), независимо от вероятности распознавания. Блок 108 принятия решения о предсказываемом действии не предсказывает смену полосы движения другого транспортного средства, когда несоответствие подтверждено, но оно невелико (когда несоответствие больше порогового значения Thd2, но меньше или равно пороговому значению Thd1) в случае, когда вероятность распознавания невысока (вероятность распознавания меньше или равна пороговому значению Thb1). А именно, блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство выполняет смену полосы движения, когда несоответствие велико (несоответствие превышает пороговое значение Thd1), независимо от вероятности распознавания, и предсказывает, что другое транспортное средство выполняет смену полосы движения, когда несоответствие небольшое, но по меньшей мере подтверждено (когда несоответствие больше порогового значения Tha2), когда вероятность распознавания высока (вероятность распознавания больше порогового значения Thb1).
[0069]
Когда два или более состояний объединяются для представления фактического состояния движения или предсказываемого состояния движения, соответствующие состояния предпочтительно сравниваются с пороговыми значениями в соответствии с таблицей, показанной на фиг.5. Результаты определения для соответствующих состояний могут быть интегрированы, чтобы определить, выполняет ли другое транспортное средство смену полосы движения.
[0070]
(Пятый пример)
Блок 108 принятия решения о предсказываемом действии сравнивает предсказываемое состояние движения, которое является состоянием движения другого транспортного средства при движении в соответствии с регулированием дорожного движения (состояние движения, когда не выполняется смена полосы движения), с фактическим состоянием движения другого транспортного средства, и вычисляет «вероятность смены полосы движения», указывающую вероятность того, что другое транспортное средство 12 выполняет смену полосы движения. В частности, блок 108 принятия решения о предсказываемом действии вычисляет вероятность смены полосы движения в соответствии с «величиной отклонения» и «несоответствием», описанными выше.
[0071]
Например, блок 108 принятия решения о предсказываемом действии вычисляет вектор (вектор переменных состояния), состоящий по меньшей мере из положения и ориентации другого транспортного средства 12 для каждого из предсказываемого состояния движения и фактического состояния движения. Скорость или степень ускорения/замедления другого транспортного средства 12 может быть добавлена к вектору переменных состояния. Блок 108 принятия решения о предсказываемом действии вычисляет в качестве расстояния e величину отклонения между предсказываемым состоянием движения (вектор переменных состояния) и фактическим состоянием движения (вектор переменных состояния). Блок 108 принятия решения о предсказываемом действии может вычислить вероятность смены полосы движения согласно распределению вероятностей f(e), имеющему расстояние e в качестве входных данных. Блок 108 принятия решения о предсказываемом действии вычисляет более высокую вероятность смены полосы движения, поскольку величина отклонения (расстояние e) больше.
[0072]
В качестве альтернативы, блок 108 принятия решения о предсказываемом действии может вычислить вероятность Pd смены полосы движения, подставив несоответствие d, вычисленное согласно формуле (2), в формулу (3). В формуле (3) N - количество состояний, объединенных для представления каждого из предсказываемого состояния движения и фактического состояния движения. Вероятность Pd смены полосы движения может быть вычислена как среднее из числа N несоответствий dn, вычисленных для соответствующих состояний. Большее несоответствие dn может привести к более высокой вероятности Pd смены полосы движения согласно формуле (3).
[0073]
[Мат. 3]
[0074]
В качестве альтернативы блок 108 принятия решения о предсказываемом действии может вычислить вероятность P смены полосы движения в соответствии с результатом сравнения между предсказываемым состоянием движения и фактическим состоянием движения и вероятностью R распознавания. В частности, блок 108 принятия решения о предсказываемом действии может использовать вероятность Pd смены полосы движения, вычисленную согласно формуле (3), как «результат сравнения между предсказываемым состоянием движения и фактическим состоянием движения». А именно, блок 108 принятия решения о предсказываемом действии может вычислить вероятность P смены полосы движения в соответствии с вероятностью Pd смены полосы движения и вероятностью R распознавания. Блок 108 принятия решения о предсказываемом действии, конечно, может использовать «величину отклонения фактического состояния движения в направлении, несоответствующем предсказываемому состоянию движения», и несоответствие d, вычисленное согласно формуле (3) как «результат сравнения между предсказываемым состоянием движения и фактическим состоянием движения».
[0075]
Например, блок 108 принятия решения о предсказываемом действии может вычислить вероятность P смены полосы движения путем подстановки вероятности Pd смены полосы движения и вероятности R распознавания в формулу (4). Таким образом, вероятность P смены полосы движения может быть вычислена с учетом вероятности R распознавания. В формуле (4) α2 и β2 являются весовыми коэффициентами для вероятности Pd смены полосы движения и вероятности R распознавания.
[0076]
[Мат. 4]

[0077]
В качестве альтернативы, блок 108 принятия решения о предсказываемом действии может вычислить вероятность P смены полосы движения в соответствии с вероятностью Pd смены полосы движения и вероятностью R распознавания, обращаясь к таблице, показанной на фиг.6, вместо использования формулы (4). Соответствующие числовые значения в таблице, показанной на фиг.6, указывают вероятность P смены полосы движения. В частности, блок 108 принятия решения о предсказываемом действии предварительно устанавливает два пороговых значения (например, 0,8 и 0,4) для каждой из вероятности Pd смены полосы движения и вероятности распознавания. Блок 108 принятия решения о предсказываемом действии сравнивает вероятность Pd смены полосы движения и вероятность распознавания с соответствующими пороговыми значениями и классифицирует каждую из вероятности Pd смены полосы движения и вероятности R распознавания на три уровня (высокий, средний, низкий). Блок 108 принятия решения о предсказываемом действии затем применяет классификацию вероятности Pd смены полосы движения и вероятности распознавания к таблице, показанной на фиг.6, чтобы определить вероятность P смены полосы движения. Блок 108 принятия решения о предсказываемом действии приводит к высокому значению вероятности P смены полосы движения («0,8», «0,6» на фиг. 6), когда вероятность R распознавания высока (например, «высокая» на фиг. 6), даже если вероятность Pd смены полосы движения мала (например, «средний» или «низкий» на фиг. 6), потому что «величина отклонения» или «несоответствия» мала.
[0078]
В пятом примере блок 108 принятия решения о предсказываемом действии может получить более высокую вероятность смены полосы движения в следующем порядке: вывеска, светофор с фильтром, дорожный знак и дорожная структура, включая линии участков, которые являются метками, указывающими правила дорожного движения. Например, весовой коэффициент γ относительно типа метки может быть добавлен к формуле (4), как показано в соответствующих формулах (5) - (7). В формулах (5) - (7) γ составляет 1,0 для вывески, 1,1 для светофора с фильтром, 1,2 для дорожного знака и 1,3 для дорожной структуры.
[0079]
[Мат. 5]



[0080]
В примерах с третьего по пятый, описанных выше, блок 108 принятия решения о предсказываемом действии может вычислить вероятность смены полосы движения путем использования фактического состояния движения третьего транспортного средства, движущегося по смежной полосе G2 движения, исключая другое транспортное средство 12, в качестве альтернативы предсказываемого состояния движения. Другими словами, блок 108 принятия решения о предсказываемом действии может вычислить «величину отклонения» или «несоответствие» от другого транспортного средства 12 или «вероятность смены полосы движения» на основе третьего транспортного средства, движущегося по той же полосе движения (смежная полоса G2 движения), в качестве другого транспортного средства 12. В частности, блок 102 обнаружения объектов получает фактическое состояние движения третьего транспортного средства, движущегося по смежной полосе G2 движения, исключая другое транспортное средство 12. Например, как проиллюстрировано на фиг. 3A, блок 102 обнаружения объектов получает фактическое состояние движения едущего впереди транспортного средства 13, движущегося впереди другого транспортного средства 12. Блок 108 принятия решения о предсказываемом действии затем сравнивает фактическое состояние движения третьего транспортного средства с фактическим состоянием движения другого транспортного средства 12, чтобы вычислить «величину отклонения», «несоответствие» или «вероятность смены полосы движения».
[0081]
Например, в пятом примере для вычисления «вероятности P смены полосы движения» блок 108 принятия решения о предсказываемом действии может вычислить вероятность P смены полосы движения согласно формуле (8). Формула (8) представляет собой формулу, в которой член вероятности Pv смены полосы движения, вычисленный с использованием фактического состояния движения третьего транспортного средства, добавляется к правой части формулы (4). Способ вычисления вероятности смены полосы движения в соответствии с «величиной отклонения» или «несоответствием», описанный в пятом примере, может применяться к способу вычисления «вероятности Pv смены полосы движения».
[0082]
Блок 108 принятия решения о предсказываемом действии может вычислить вероятность P смены полосы движения путем подстановки вероятности Pd смены полосы движения, вероятности R распознавания и вероятности Pv смены полосы движения в формулу (8). Таким образом, вероятность P смены полосы движения может быть вычислена с учетом не только вероятности R распознавания, но также вероятности Pv смены полосы движения, вычисленной с использованием фактического состояния движения третьего транспортного средства. В формуле (8) α2, β2 и ε - весовые коэффициенты для вероятности Pd смены полосы движения, вероятности R распознавания и вероятности Pv смены полосы движения. Например, α2=0,25, β2=0,5 и ε=0,25.
[0083]
[Мат. 6]

[0084]
Блок 108 принятия решения о предсказываемом действии сравнивает вычисленную вероятность P смены полосы движения с заранее определенным пороговым значением (девятым пороговым значением), чтобы определить, выполняет ли другое транспортное средство 12 смену полосы движения. Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность смены полосы движения больше, чем заранее определенное пороговое значение (девятое пороговое значение). Блок 108 принятия решения о предсказываемом действии может определять, что другое транспортное средство 12 не выполняет смену полосы движения, когда вероятность смены полосы движения меньше или равна предварительно определенному пороговому значению (девятое пороговое значение).
[0085]
Блок 108 принятия решения о предсказываемом действии может определять вероятность смены полосы движения, используя множество различных опорных значений, чтобы управлять расстоянием между рассматриваемым транспортным средством 11 и другим транспортным средством 12 или скоростью рассматриваемого транспортного средства 11 многоступенчатым образом. В частности, блок 108 принятия решения о предсказываемом действии предварительно подготавливает множество заранее определенных пороговых значений (седьмых пороговых значений) многоступенчатым образом. Блок 108 принятия решения о предсказываемом действии затем сравнивает соответствующие заранее определенные пороговые значения с вероятностью смены полосы движения, чтобы определить, выполняет ли другое транспортное средство 12 смену полосы движения многоступенчатым образом. Это дает возможность многоступенчатого управления для рассматриваемого транспортного средства 11, чтобы гарантировать безопасность при смене полосы движения другого транспортного средства 12.
[0086]
Блок 109 формирования маршрута рассматриваемого транспортного средства может формировать маршрут рассматриваемого транспортного средства 11 в соответствии с действием другого транспортного средства 12, предсказываемым блоком 108 принятия решения о предсказываемом действии. Блок 109 формирования маршрута рассматриваемого транспортного средства может формировать маршрут с учетом смены полосы движения другого транспортного средства 12 на собственную полосу G1 движения, когда предсказывается, что другое транспортное средство 12 выполнит смену полосы движения. Это обеспечивает маршрут, по которому рассматриваемое транспортное средство 11 может плавно следовать, сохраняя при этом достаточное расстояние от другого транспортного средства 12 и избегая внезапного замедления или быстрого поворота рассматриваемого транспортного средства 11 в ответ на действие другого транспортного средства 12. «Маршрут рассматриваемого транспортного средства 11» указывает не только профиль положений другого транспортного средства 11 в разное время, но также профиль скоростей другого транспортного средства 11 в соответствующих положениях. Блок 109 формирования маршрута рассматриваемого транспортного средства формирует маршрут собственного транспортного средства 11 в зависимости от смены полосы движения. Блок 109 формирования маршрута рассматриваемого транспортного средства может формировать маршрут таким образом, чтобы относительное расстояние другого транспортного средства 12 по отношению к рассматриваемому транспортному средству 11 было большим. Когда несколько транспортных средств находятся в линии перед рассматриваемым транспортным средством 11, блок 109 формирования маршрута рассматриваемого транспортного средства может вычислить маршрут рассматриваемого транспортного средства 11 таким образом, чтобы рассматриваемое транспортное средство 11 замедлялось, чтобы предоставить пространство, чтобы позволить другому транспортному средству 12 вклиниться в линию транспортных средств. Это может более безопасно управлять рассматриваемым транспортным средством 11.
[0087]
Блок 110 управления транспортным средством приводит в действие по меньшей мере одно из рулевого привода, привода педали ускорения и привода педали тормоза в соответствии со своим собственным положением, вычисленным блоком 101 оценки положения рассматриваемого транспортного средства, так что рассматриваемое транспортное средство 11 может двигаться, чтобы следовать по маршруту, сформированному блоком 109 формирования маршрута рассматриваемого транспортного средства. Хотя вариант осуществления проиллюстрирован на примере, в котором рассматриваемое транспортное средство 11 управляется в соответствии со сформированным маршрутом, рассматриваемое транспортное средство 11 может управляться без формирования маршрута рассматриваемого транспортного средства 11. В таком случае рассматриваемым транспортным средством 11 можно управлять в соответствии с относительным расстоянием до другого транспортного средства 12 или разницей в угле ориентации между другим транспортным средством 12 и рассматриваемым транспортным средством 11. При определении того, выполняет ли другое транспортное средство 12 смену полосы движения многоступенчатым образом, блок 110 управления транспортным средством может выполнять многоступенчатое управление для рассматриваемого транспортного средства 11, чтобы обеспечить безопасность при смене полосы движения другого транспортного средства 12. В качестве альтернативы, блок 110 управления транспортным средством может управлять расстоянием между рассматриваемым транспортным средством 11 и другим транспортным средством 12 и скоростью рассматриваемого транспортного средства 11, используя при этом значение самой вероятности смены полосы движения.
[0088]
Пример работы устройства предсказания действий другого транспортного средства, показанного на фиг.1, описывается ниже как способ предсказания действий другого транспортного средства согласно варианту осуществления со ссылкой на фиг.2. Процесс, показанный на фиг.2, повторяется с заданными интервалами в течение периода с момента включения выключателя зажигания рассматриваемого транспортного средства 11 (в случае электрического транспортного средства включается питание) до момента выключения выключателя зажигания. Блок-схема управления, показанная на фиг. 2, выполняется в предположении, что рассматриваемое транспортное средство 11 движется посредством автономного вождения.
[0089]
На этапе S201 блок 101 оценки положения рассматриваемого транспортного средства измеряет собственное положение (абсолютное положение и относительное положение) рассматриваемого транспортного средства 11. Затем блок 101 оценки положения рассматриваемого транспортного средства определяет положение и ориентацию рассматриваемого транспортного средства 11 на карте. Процесс переходит к этапу S202, и блок 102 обнаружения объектов получает фактическое состояние движения другого транспортного средства 12. В частности, блок 102 обнаружения объектов обнаруживает другое транспортное средство 12 с использованием соответствующих датчиков обнаружения объектов, чтобы отслеживать другое транспортное средство 12. Блок 102 обнаружения объектов выводит фактическое состояние движения другого транспортного средства 12 в качестве результата обнаружения в виде сверху, например, если смотреть с воздуха над рассматриваемым транспортным средством 11.
[0090]
Процесс переходит к этапу S203, и блок 103 формирования вероятности действия предсказывает вероятность действия, которое другое транспортное средство 12 предпримет в ближайшем будущем, в соответствии со структурой дороги и структурой полосы движения. Вероятность действия включает смену полосы движения. Процесс переходит к этапу S204, и блок 104 получения информации регулирования дорожного движения получает информацию о правилах дорожного движения (информацию регулирования дорожного движения), относящуюся к дороге вокруг рассматриваемого транспортного средства 11. Блок 104 получения информации регулирования дорожного движения может получать информацию регулирования дорожного движения на дороге вокруг рассматриваемого транспортного средства 11, в частности, относительно смежной полосы движения (правой полосы G2 движения), по которой движется другое транспортное средство 12, в качестве цели определения для смены полосы движения. Блок 104 получения информации регулирования дорожного движения может получать информацию регулирования дорожного движения в соответствии с картографическими данными или анализом изображений вокруг рассматриваемого транспортного средства 11.
[0091]
Когда информацию регулирования дорожного движения получить невозможно (НЕТ на этапе S205), процесс переходит к этапу S208. Когда информация регулирования дорожного движения может быть получена (ДА на этапе S205), процесс переходит к этапу S206, и блок 105 вывода правил предсказывает «предсказываемое состояние движения», как правило, которое представляет собой состояние движения, в котором движется другое транспортное средство 12. согласно регулированию дорожного движения. Процесс переходит к этапу S207, и блок 106 вычисления вероятности распознавания вычисляет «вероятность распознавания», указывающую вероятность того, что другое транспортное средство 12 распознает регулирование дорожного движения. Используемый здесь термин «регулирование дорожного движения» включает в себя по меньшей мере регулирование дорожного движения в отношении смежной полосы движения (правая полоса G2 движения), по которой движется другое транспортное средство 12.
[0092]
Процесс переходит к этапу S208, и блок 107 обнаружения изменения состояния движения обнаруживает изменение в фактическом состоянии движения другого транспортного средства 12, обнаруженное блоком 102 обнаружения объектов. В частности, блок 107 обнаружения изменения состояния движения определяет, изменилось ли фактическое состояние движения в соответствии со сравнением между фактическими состояниями движения в двух разных моментах времени или сравнением между величинами изменения в фактических состояниях движения на единицу времени в двух разных моментах времени.
[0093]
Процесс переходит к этапу S209, и блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения в соответствии с вероятностью распознавания, вычисленной блоком 106 вычисления вероятности распознавания, предсказываемым состоянием движения, предсказанным блоком 105 вывода правил, и изменением фактического состояния движения.
[0094]
Процесс переходит к этапу S210, и блок 109 формирования маршрута рассматриваемого транспортного средства формирует маршрут рассматриваемого транспортного средства 11 в соответствии с действием другого транспортного средства 12, предсказанным на этапе S209. Блок 109 формирования маршрута рассматриваемого транспортного средства формирует маршрут с учетом смены полосы движения другого транспортного средства 12 на собственную полосу G1 движения, когда предсказывается, что другое транспортное средство 12 выполнит смену полосы движения. Блок 109 формирования маршрута рассматриваемого транспортного средства определяет относительное расстояние другого транспортного средства 12 по отношению к рассматриваемому транспортному средству 11, чтобы определить путь и скорость рассматриваемого транспортного средства 11, необходимые для сохранения относительного расстояния, в качестве маршрута рассматриваемого транспортного средства 11.
[0095]
Процесс переходит к этапу S211, и блок 110 управления транспортным средством приводит в действие соответствующие исполнительные механизмы в соответствии с собственным положением, вычисленным блоком 101 оценки положения рассматриваемого транспортного средства, так что рассматриваемое транспортное средство 11 движется по маршруту, сформированному на этапе S210. Блок 110 управления транспортным средством может управлять рассматриваемым транспортным средством 11 без формирования маршрута рассматриваемого транспортного средства 11.
[0096]
Как описано выше, вариант осуществления может обеспечивать следующие рабочие эффекты.
[0097]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения в соответствии с вероятностью распознавания другого транспортного средства 12, предсказываемым состоянием движения, полученным из регулирования дорожного движения впереди другого транспортного средства 12, и изменением в фактическом состоянии движения другого транспортного средства 12. Изменение состояния движения считается подготовительным действием, которое другое транспортное средство 12 хочет выполнить для следующего действия (смены полосы движения) из-за распознавания регулирования дорожного движения, когда изменение состояния движения другого транспортного средства 12 мало, но вероятность распознавания высока. Другими словами, высока вероятность того, что состояние движения другого транспортного средства 12 (включая поведение транспортного средства) изменилось до и после распознавания регулирования дорожного движения. Это позволяет блоку 108 принятия решения о предсказываемом действии предсказывать смену полосы движения на ранней стадии, чтобы избежать задержки в предсказании смены полосы движения. Кроме того, блок 108 принятия решения о предсказываемом действии определяет смену полосы движения в соответствии с фактическим состоянием движения и предсказываемым состоянием движения, что обеспечивает точное предсказание смены полосы движения другого транспортного средства 12. Это может дополнительно избежать замедления рассматриваемого транспортного средства 11 из-за неправильного предсказания и внезапного замедления рассматриваемого транспортного средства 11 из-за задержки предсказания.
[0098]
Предсказываемое состояние движения может быть представлено одним значением или комбинацией двух или более значений относительно положения, включая абсолютное положение и относительное положение, ориентации (угол рыскания, направление оси транспортного средства), скорости, ускорения и пути движения другого транспортного средства 12. Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0099]
В качестве альтернативы, предсказываемое состояние движения может быть представлено одним или комбинацией двух или более состояний другого транспортного средства 12 относительно направления другого транспортного средства 12 относительно смежной полосы движения (правая полоса G2 движения) или собственной полосы движения (левая полоса G1 движения), положения другого транспортного средства 12 в смежной полосе движения в направлении ширины транспортного средства, скорости другого транспортного средства 12, ускорения другого транспортного средства 12 и замедления другого транспортного средства 12. Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0100]
Блок 105 вывода правил предсказывает предсказываемое состояние движения в соответствии с информацией регулирования дорожного движения, структурой дороги на смежной полосе движения (G2) и установленной скоростью на дороге на смежной полосе движения (G2). Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0101]
Блок 106 вычисления вероятности распознавания вычисляет вероятность распознавания с использованием максимального диапазона распознавания и частичного диапазона распознавания. Это может повысить точность расчета вероятности распознавания. Кроме того, может быть доступно определение вероятности распознавания на основе типичного водителя. Это также позволяет определять наличие или отсутствие блокирующего объекта в окружающей среде, например периферийных транспортных средств или конструкции.
[0102]
Блок 106 вычисления вероятности распознавания вычисляет более высокую вероятность распознавания в случае, когда дорожная структура, позволяющая распознавать регулирование дорожного движения, или метка, указывающая регулирование дорожного движения, включена как в максимальный диапазон распознавания, так и в частичный диапазон распознавания, чем в случае в котором дорожная структура или метка не входят в максимальный диапазон распознавания или в частичный диапазон распознавания. Это повышает точность расчета вероятности распознавания.
[0103]
Блок 106 вычисления вероятности распознавания вычисляет более высокую вероятность распознавания в случае, когда либо дорожная структура, позволяющая распознавать регулирование дорожного движения, либо метка, указывающая регулирование дорожного движения, полностью включена в максимальный диапазон распознавания или частичный диапазон распознавания, чем в случае, когда дорожная структура или метка частично включены в максимальный диапазон распознавания или в частичный диапазон распознавания. Это повышает точность расчета вероятности распознавания.
[0104]
Блок 106 вычисления вероятности распознавания вычисляет более высокую вероятность распознавания, когда расстояние от другого транспортного средства 12 до дорожной структуры, позволяющей распознавать регулирование дорожного движения, или метки, указывающей регулирование дорожного движения, короче. Например, как проиллюстрировано на фиг. 3B, модуль 106 вычисления вероятности распознавания вычисляет более высокую вероятность распознавания, по мере уменьшения расстояния H1 от другого транспортного средства 12 до стрелки 14 поворота вправо. Это повышает точность расчета вероятности распознавания.
[0105]
Блок 106 вычисления вероятности распознавания вычисляет вероятность распознавания, используя в качестве максимального диапазона распознавания или частичного диапазона распознавания диапазон распознавания рассматриваемого транспортного средства, позволяющий рассматриваемому транспортному средству 11 распознавать регулирование дорожного движения. Это повышает точность расчета вероятности распознавания.
[0106]
Блок 106 вычисления вероятности распознавания вычисляет вероятность распознавания в соответствии с дорожной структурой, позволяющей распознавать регулирование дорожного движения, или меткой, указывающей регулирование дорожного движения, фактически обнаруженные рассматриваемым транспортным средством 11. Это повышает точность расчета вероятности распознавания.
[0107]
При обнаружении изменения в фактическом состоянии движения (на этапе S208 на фиг.2) блок 102 обнаружения объектов получает фактическое состояние движения на этапе S209 на фиг.2. Это позволяет точно определить «фактическое состояние движения», чтобы с высокой точностью предсказывать действия другого транспортного средства 12.
[0108]
Блок 107 обнаружения изменения состояния движения определяет, изменилось ли фактическое состояние движения в соответствии со сравнением между фактическими состояниями движения в двух разных моментах времени или сравнением между величинами изменения фактических состояний движения в единицу времени в двух разных моментах времени. Таким образом, блок 107 обнаружения изменения состояния движения может обнаруживать изменение фактического состояния движения с высокой точностью.
[0109]
Блок 102 обнаружения объектов получает фактическое состояние движения после изменения в качестве фактического состояния движения. Фактическое состояние движения после изменения представлено одним значением или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства 12. Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0110]
Блок 102 обнаружения объектов получает информацию об изменении, которая представляет собой информацию об изменении состояния движения. Информация об изменении может быть представлена одним значением или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства 12. В качестве альтернативы, информация об изменении может быть представлена одним или комбинацией двух или более состояний другого транспортного средства 12 относительно направления другого транспортного средства 12 по отношению к смежной полосе G2 движения или собственной полосе G1 движения, положения другого транспортного средства 12 в смежной полосе G2 движения в направлении ширины транспортного средства, скорости другого транспортного средства 12, ускорения другого транспортного средства 12 и замедления другого транспортного средства 12. Это позволяет определять фактическое состояние движения с высокой точностью.
[0111]
Блок 108 принятия решения о предсказываемом действии сравнивает предсказываемое состояние движения и фактическое состояние движения и предсказывает, что другое транспортное средство 12 выполняет смену полосы движения в соответствии с результатом сравнения и вероятностью распознавания. Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0112]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания больше порогового значения Thb1 (первое пороговое значение) и величина отклонения больше порогового значения Tha2 (второе пороговое значение). Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания меньше или равна пороговому значению Thb1 (первое пороговое значение), но величина отклонения больше порогового значения Tha1 (третье пороговое значение). Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0113]
Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания больше порогового значения Thb1 (четвертое пороговое значение), а несоответствие больше порогового значения Thd2 (пятое пороговое значение). Блок 108 принятия решения о предсказываемом действии предсказывает, что другое транспортное средство 12 выполняет смену полосы движения, когда вероятность распознавания меньше или равна пороговому значению Thb1 (четвертое пороговое значение), но несоответствие больше порогового значения Thd1 (шестое пороговое значение). Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0114]
Блок 108 принятия решения о предсказываемом действии сравнивает предсказываемое состояние движения с фактическим состоянием движения, чтобы вычислить «вероятность смены полосы движения», указывающую вероятность того, что другое транспортное средство 12 выполняет смену полосы движения. Блок 108 принятия решения о предсказываемом действии сравнивает вычисленную вероятность смены полосы движения с заранее определенным пороговым значением (седьмым пороговым значением), чтобы определить, выполняет ли другое транспортное средство 12 смену полосы движения. Это позволяет избежать ошибки и задержки в предсказании действий другого транспортного средства 12.
[0115]
Блок 108 принятия решения о предсказываемом действии вычисляет более высокую вероятность смены полосы движения, по мере увеличения величины отклонения (расстояние e). Это позволяет рассчитать вероятность смены полосы движения с высокой точностью.
[0116]
Блок 108 принятия решения о предсказываемом действии вычисляет более высокую вероятность Pd смены полосы движения по мере увеличения несоответствия dn согласно формуле (3). Это позволяет рассчитать вероятность смены полосы движения с высокой точностью.
[0117]
Блок 108 принятия решения о предсказываемом действии вычисляет вероятность P смены полосы движения в соответствии с результатом сравнения между предсказываемым состоянием движения и фактическим состоянием движения и вероятностью R распознавания согласно формуле (4) или таблице, показанной на фиг. 6. Это позволяет рассчитать вероятность смены полосы движения с высокой точностью.
[0118]
Блок 108 принятия решения о предсказываемом действии вычисляет более высокую вероятность смены полосы движения в следующем порядке: вывеска, светофор с фильтром, дорожный знак и дорожная структура, включая линии участков, которые являются метками, указывающими правила дорожного движения. Это позволяет рассчитать вероятность смены полосы движения с высокой точностью. Этот расчет может, в частности, точно и быстро предсказывать внезапное вклинивание другого транспортного средства 12.
[0119]
Блок 108 принятия решения о предсказываемом действии вычисляет вероятность смены полосы движения путем использования фактического состояния движения третьего транспортного средства, движущегося по смежной полосе G2 движения, исключая другое транспортное средство 12, в качестве альтернативы предсказываемому состоянию движения. Блок 108 принятия решения о предсказываемом действии может определять «величину отклонения» или «несоответствие» не формально в соответствии с правилами дорожного движения, а на основе фактического действия третьего транспортного средства. Это дает возможность точного и гибкого определения вероятности смены полосы движения вместо формального определения, основанного на правилах дорожного движения.
[0120]
Блок 108 принятия решения о предсказываемом действии определяет вероятность смены полосы движения путем использования множества различных опорных значений, чтобы управлять расстоянием между рассматриваемым транспортным средством 11 и другим транспортным средством 12 или скоростью рассматриваемого транспортного средства 11 многоступенчатым образом. Это дает возможность многоступенчатого управления для рассматриваемого транспортного средства 11, чтобы гарантировать безопасность при смене полосы движения другого транспортного средства 12.
[0121]
Соответствующие функции, описанные в вышеуказанном варианте осуществления, могут быть реализованы в одной или множестве схем обработки. Соответствующие схемы обработки включают в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Устройство обработки включает в себя специализированную интегральную схему (ASIC), сконфигурированную для выполнения функций, описанных в варианте осуществления, и традиционные компоненты схемы.
[0122]
Описанный выше вариант осуществления является примером настоящего изобретения. Следует понимать, что настоящее изобретение не предназначено для ограничения описанным выше вариантом осуществления, и для специалистов в данной области очевидны различные модификации в зависимости от конструкции без отклонения от технической идеи настоящего изобретения. Например, хотя фиг. 3A и фиг. 3B иллюстрируют ситуацию движения, в которой рассматриваемое транспортное средство движется прямо, а другое транспортное средство движется по полосе поворота вправо, настоящее изобретение не ограничивается этим примером и может быть применимо к случаю, когда рассматриваемое транспортное средство движется прямо, а другое транспортное средство движется по полосе поворота влево.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0123]
11 РАССМАТРИВАЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО
12 ДРУГОЕ ТРАНСПОРТНОЕ СРЕДСТВО
14 СТРЕЛКА ПОВОРОТА ВПРАВО (МЕТКА, УКАЗЫВАЮЩАЯ РЕГУЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ)
G1 СОБСТВЕННАЯ ПОЛОСА ДВИЖЕНИЯ
G2 СМЕЖНАЯ ПОЛОСА ДВИЖЕНИЯ
H1 РАССТОЯНИЕ
La МАКСИМАЛЬНЫЙ ДИАПАЗОН РАСПОЗНАВАНИЯ
Lb ЧАСТИЧНЫЙ ДИАПАЗОН РАСПОЗНАВАНИЯ
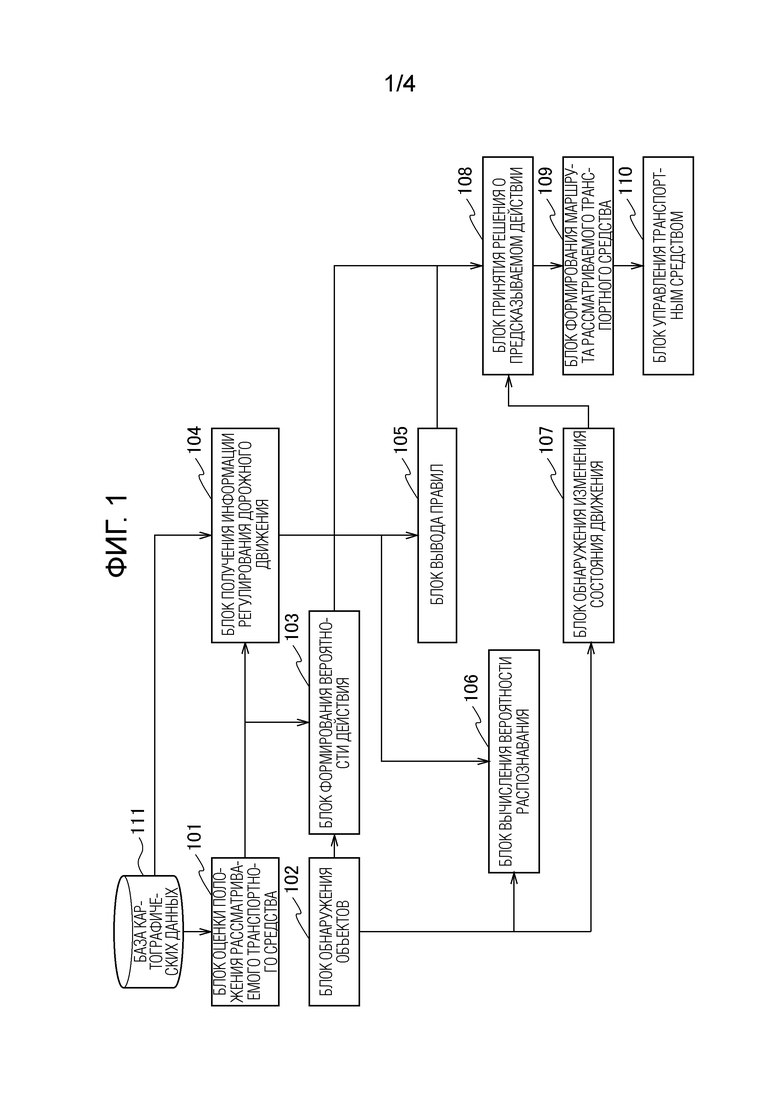
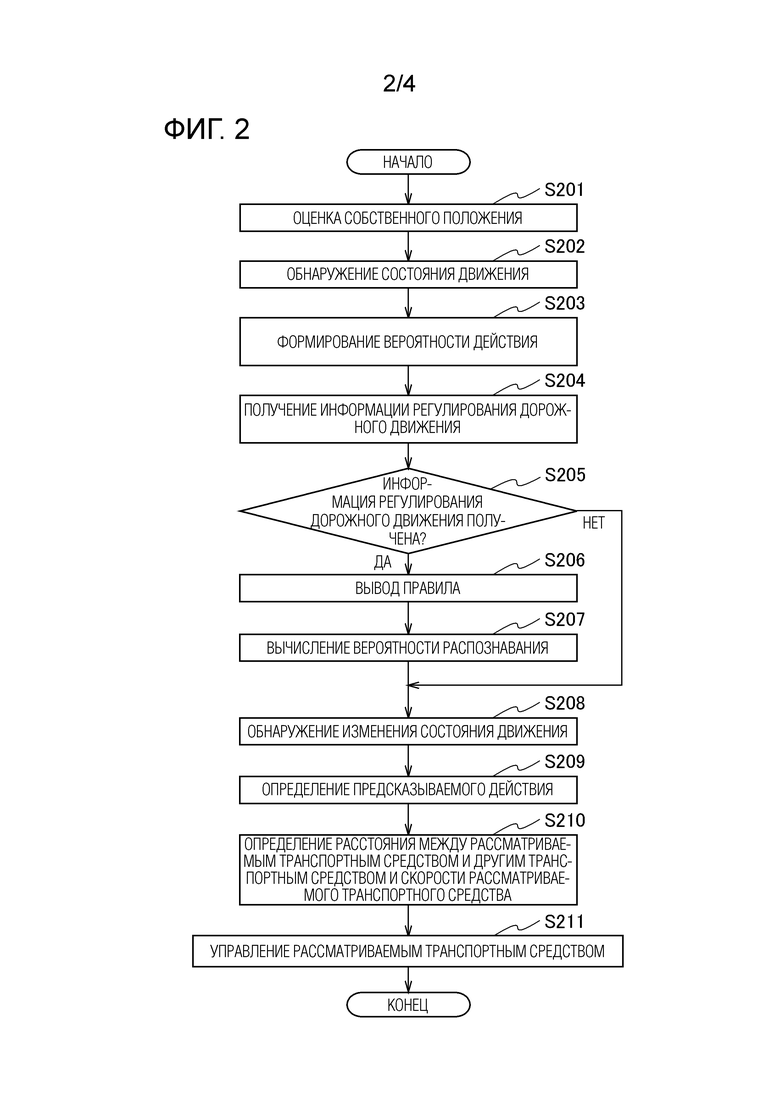
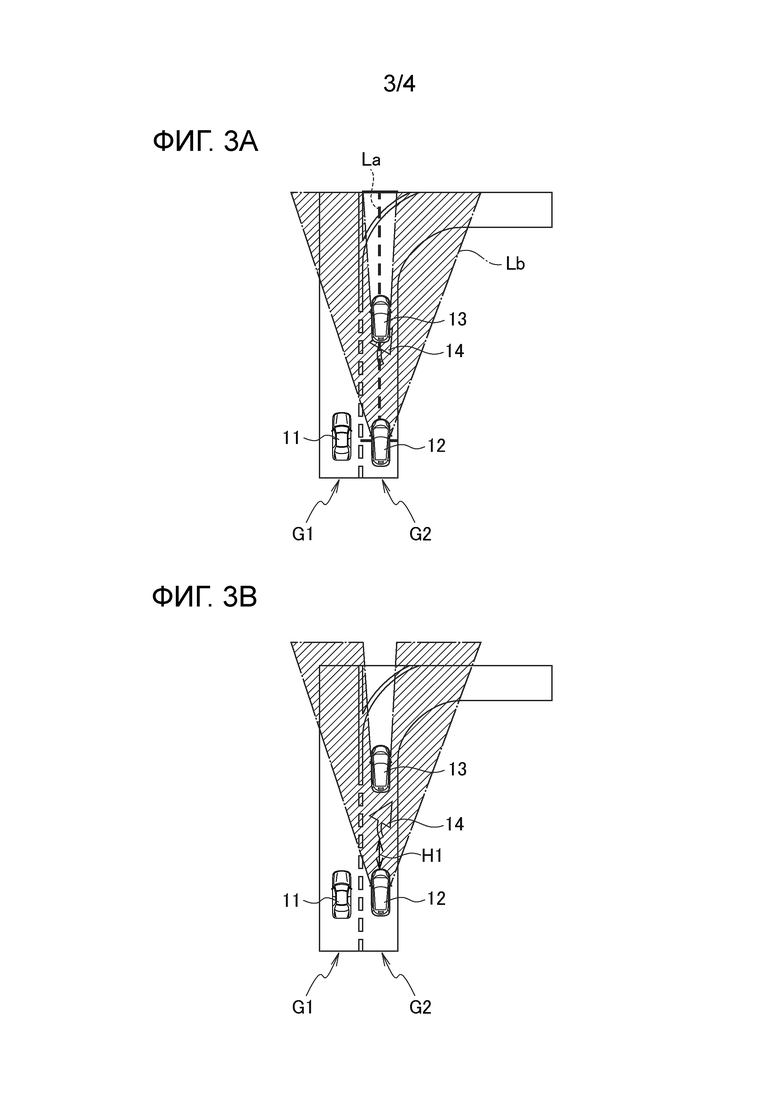
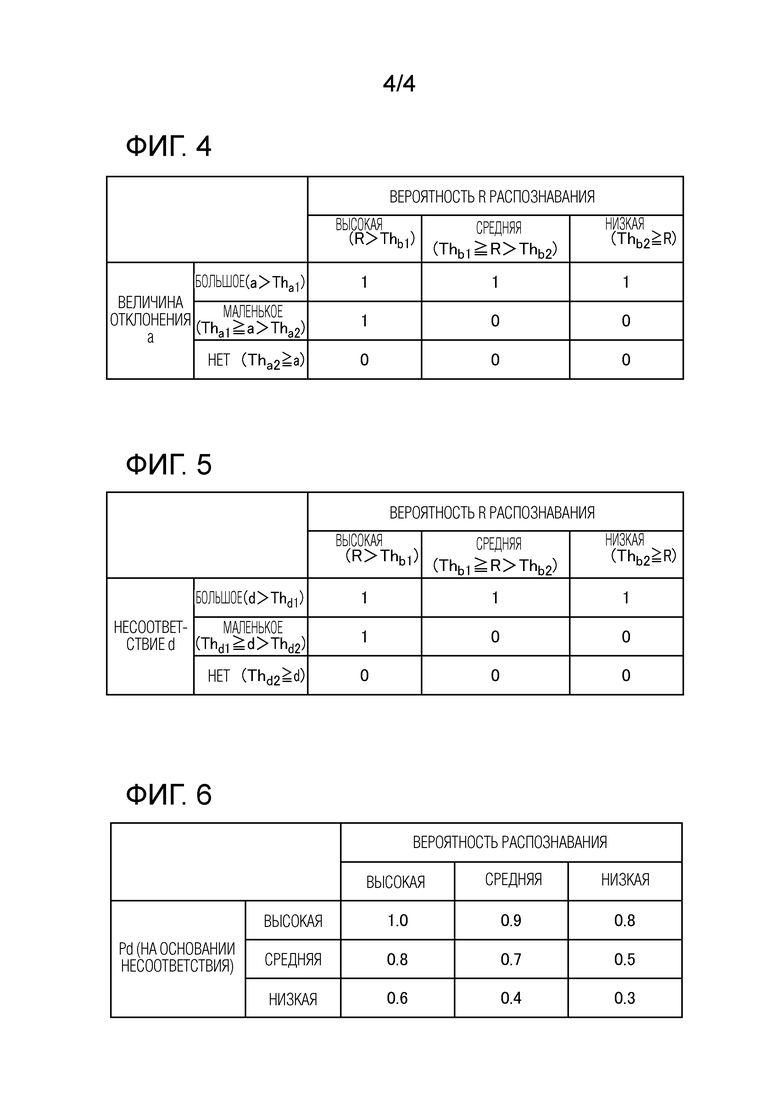
Изобретение относится к способу и устройству предсказания действий другого транспортного средства. Предлагается способ предсказания действий другого транспортного средства устройства предсказания действий другого транспортного средства для предсказания того, что другое транспортное средство, движущееся в смежной полосе движения, смежной с собственной полосой движения, по которой движется рассматриваемое транспортное средство, выполняет смену полосы движения со смежной полосы движения на собственную полосу движения впереди рассматриваемого транспортного средства, в соответствии с поведением другого транспортного средства. Способ включает получение фактического состояния движения другого транспортного средства, получение информации регулирования дорожного движения в качестве информации о регулировании дорожного движения в отношении смежной полосы движения перед другим транспортным средством, предсказание предсказываемого состояния движения, которое является состоянием движения другого транспортного средства при движении в соответствии с регулированием дорожного движения, вычисление вероятности распознавания, указывающей на вероятность того, что другое транспортное средство распознает регулирование дорожного движения, сравнение предсказываемого состояния движения с фактическим состоянием движения и предсказание, что другое транспортное средство выполняет смену полосы движения, в соответствии с результатом сравнения и вероятностью распознавания. Достигается повышение безопасности управления беспилотного транспортного средства. 2 н. и 22 з.п. ф-лы, 7 ил.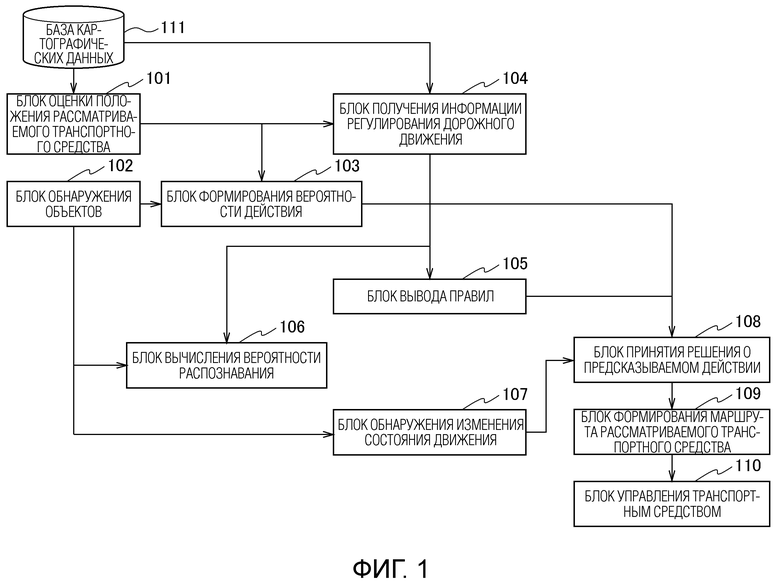
1. Способ предсказания действий другого транспортного средства устройства предсказания действий другого транспортного средства для предсказания того, что другое транспортное средство, движущееся в смежной полосе движения, смежной с собственной полосой движения, по которой движется рассматриваемое транспортное средство, выполняет смену полосы движения со смежной полосы движения на собственную полосу движения впереди рассматриваемого транспортного средства, в соответствии с поведением другого транспортного средства, причем способ включает:
получение фактического состояния движения другого транспортного средства;
получение информации регулирования дорожного движения в качестве информации о регулировании дорожного движения в отношении смежной полосы движения перед другим транспортным средством;
предсказание предсказываемого состояния движения, которое является состоянием движения другого транспортного средства при движении в соответствии с регулированием дорожного движения;
вычисление вероятности распознавания, указывающей на вероятность того, что другое транспортное средство распознает регулирование дорожного движения;
сравнение предсказываемого состояния движения с фактическим состоянием движения; и
предсказание, что другое транспортное средство выполняет смену полосы движения, в соответствии с результатом сравнения и вероятностью распознавания.
2. Способ предсказания действий другого транспортного средства по п. 1, в котором предсказываемое состояние движения представлено одним или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства.
3. Способ предсказания действий другого транспортного средства по п. 1, в котором предсказываемое состояние движения представлено одним или комбинацией двух или более состояний другого транспортного средства касательно направления другого транспортного средства относительно смежной полосы движения или собственной полосы движения, положения другого транспортного средства в смежной полосе движения в направлении ширины транспортного средства, скорости другого транспортного средства, ускорения другого транспортного средства и замедления другого транспортного средства.
4. Способ предсказания действий другого транспортного средства по любому из пп. 1-3, дополнительно содержащий предсказание предсказываемого состояния движения в соответствии с информацией регулирования дорожного движения, структурой дороги касательно смежной полосы движения и установленной скоростью на дороге в смежной полосе движения.
5. Способ предсказания действий другого транспортного средства по любому из пп. 1-4, дополнительно содержащий вычисление вероятности распознавания путем использования максимального диапазона распознавания, который является максимальным диапазоном, позволяющим другому транспортному средству распознавать регулирование дорожного движения, и частичного диапазона распознавания, который является диапазоном, позволяющим другому транспортному средству распознавать регулирование дорожного движения в зависимости от высоты другого транспортного средства и условий движения другого транспортного средства.
6. Способ предсказания действий другого транспортного средства по п. 5, дополнительно содержащий этап, на котором вычисляют вероятность распознавания, которая выше в случае, когда дорожная структура, позволяющая другому транспортному средству распознавать регулирование дорожного движения, или метка, указывающая регулирование дорожного движения, включена как в максимальный диапазон распознавания, так и в частичный диапазон распознавания, чем в случае, когда дорожная структура или метка не включена в максимальный диапазон распознавания или в частичный диапазон распознавания.
7. Способ предсказания действий другого транспортного средства по п. 5 или 6, дополнительно содержащий этап, на котором вычисляют вероятность распознавания, которая выше в случае, когда либо дорожная структура, позволяющая другому транспортному средству распознавать регулирование дорожного движения, либо метка, указывающая регулирование дорожного движения, полностью включена в максимальный диапазон распознавания или частичный диапазон распознавания, чем в случае, когда дорожная структура или метка частично включена в максимальный диапазон распознавания или частичный диапазон распознавания.
8. Способ предсказания действий другого транспортного средства по любому из пп. 5-7, дополнительно содержащий этап, на котором вычисляют вероятность распознавания, которая тем выше, чем короче расстояние от другого транспортного средства до дорожной структуры, позволяющей другому транспортному средству распознавать регулирование дорожного движения, или метки, указывающей регулирование дорожного движения.
9. Способ предсказания действий другого транспортного средства по любому из пп. 5-8, дополнительно содержащий вычисление вероятности распознавания с использованием в качестве максимального диапазона распознавания или частичного диапазона распознавания диапазона распознавания рассматриваемого транспортного средства, позволяющего рассматриваемому транспортному средству распознавать регулирование дорожного движения.
10. Способ предсказания действий другого транспортного средства по любому из пп. 5-8, дополнительно содержащий этап, на котором вычисляют вероятность распознавания в соответствии с дорожной структурой, позволяющей распознавать регулирование дорожного движения, или меткой, указывающей регулирование дорожного движения, фактически обнаруженными рассматриваемым транспортным средством.
11. Способ предсказания действий другого транспортного средства по любому из пп. 1-10, дополнительно содержащий получение фактического состояния движения при обнаружении изменения в фактическом состоянии движения.
12. Способ предсказания действий другого транспортного средства по п. 11, дополнительно содержащий обнаружение изменения фактического состояния движения, когда фактические состояния движения в двух разных моментах времени имеют разницу, равную первому опорному значению или больше, или когда величины изменений в фактических состояниях движения в единицу времени в двух разных моментах времени имеют разницу, равную второму опорному значению или больше.
13. Способ предсказания действий другого транспортного средства по п. 11, дополнительно содержащий получение фактического состояния движения после изменения,
при этом фактическое состояние движения после изменения представлено одним или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства.
14. Способ предсказания действий другого транспортного средства по п. 11, дополнительно содержащий получение информации об изменении в качестве фактического состояния движения, которая является информацией, указывающей изменение в состоянии движения,
при этом информация об изменении представлена либо
одним или комбинацией двух или более значений, указывающих положение, ориентацию, скорость, ускорение и путь движения другого транспортного средства, или
одним или комбинацией двух или более состояний другого транспортного средства касательно направления другого транспортного средства относительно смежной полосы движения или собственной полосы движения, положения другого транспортного средства на смежной полосе движения в направлении ширины транспортного средства, скорости другого транспортного средства, ускорения другого транспортного средства и замедления другого транспортного средства.
15. Способ предсказания действий другого транспортного средства по любому из пп. 1-14, дополнительно содержащий:
сравнение предсказываемого состояния движения с фактическим состоянием движения для вычисления величины отклонения фактического состояния движения относительно предсказываемого состояния движения;
предсказание того, что другое транспортное средство выполняет смену полосы движения, когда вероятность распознавания превышает предварительно определенное первое пороговое значение и величина отклонения превышает предварительно определенное второе пороговое значение; и
предсказание того, что другое транспортное средство выполняет смену полосы движения, когда величина отклонения превышает предварительно определенное третье пороговое значение, превышающее второе пороговое значение.
16. Способ предсказания действий другого транспортного средства по любому из пп. 1-14, дополнительно содержащий:
сравнение предсказываемого состояния движения с фактическим состоянием движения для вычисления несоответствия фактического состояния движения относительно предсказываемого состояния движения;
предсказание того, что другое транспортное средство выполняет смену полосы движения, когда вероятность распознавания превышает предварительно определенное четвертое пороговое значение, а несоответствие превышает предварительно определенное пятое пороговое значение; и
предсказание того, что другое транспортное средство выполняет смену полосы движения, когда несоответствие превышает предварительно определенное шестое пороговое значение, превышающее пятое пороговое значение.
17. Способ предсказания действий другого транспортного средства по любому из пп. 1-14, дополнительно содержащий:
сравнение предсказываемого состояния движения с фактическим состоянием движения для вычисления вероятности смены полосы движения, указывающей вероятность того, что другое транспортное средство выполняет смену полосы движения; и
предсказание того, что другое транспортное средство выполняет смену полосы движения, когда вероятность смены полосы движения превышает предварительно определенное седьмое пороговое значение.
18. Способ предсказания действий другого транспортного средства по п. 15, дополнительно содержащий:
сравнение предсказываемого состояния движения с фактическим состоянием движения для вычисления вероятности смены полосы движения, указывающей вероятность того, что другое транспортное средство выполняет смену полосы движения; и
расчет вероятности смены полосы движения, которая тем выше, чем больше величина отклонения.
19. Способ предсказания действий другого транспортного средства по п. 16, дополнительно содержащий:
сравнение предсказываемого состояния движения с фактическим состоянием движения для вычисления вероятности смены полосы движения, указывающей вероятность того, что другое транспортное средство выполняет смену полосы движения; и
расчет вероятности смены полосы движения, которая тем выше, чем больше несоответствие.
20. Способ предсказания действий другого транспортного средства по любому из пп. 17-19, дополнительно содержащий:
сравнение предсказываемого действия движения с фактическим действием движения; и
расчет вероятности смены полосы движения в соответствии с результатом сравнения и вероятностью распознавания.
21. Способ предсказания действий другого транспортного средства по п. 17, дополнительно содержащий вычисление вероятности смены полосы движения, которая выше в порядке вывески, светофора с фильтром, дорожного знака и дорожной структуры, каждая из которых является меткой, указывающей регулирование дорожного движения.
22. Способ предсказания действий другого транспортного средства по п. 17, дополнительно содержащий:
получение фактического состояния движения третьего транспортного средства, движущегося по смежной полосе движения, исключая другое транспортное средство; и
сравнение фактического состояния движения третьего транспортного средства с фактическим состоянием движения другого транспортного средства для вычисления вероятности смены полосы движения.
23. Способ предсказания действий другого транспортного средства по п. 17, дополнительно содержащий определение вероятности смены полосы движения посредством использования множества различных опорных значений, чтобы управлять расстоянием транспортного средства между рассматриваемым транспортным средством и другим транспортным средством или скоростью рассматриваемого транспортного средства многоступенчатым способом.
24. Устройство предсказания действий другого транспортного средства, содержащее блок управления для предсказания того, что другое транспортное средство, движущееся в смежной полосе движения, смежной с собственной полосой движения, по которой движется рассматриваемое транспортное средство, выполняет смену полосы движения со смежной полосы движения на собственную полосу движения перед рассматриваемым транспортным средством, в соответствии с поведением другого транспортного средства, причем блок управления выполнен с возможностью:
получить фактическое состояние движения другого транспортного средства;
получить информацию регулирования дорожного движения в качестве информации о регулировании дорожного движения касательно смежной полосы движения перед другим транспортным средством;
предсказывать предсказываемое состояние движения, которое является состоянием движения другого транспортного средства при движении в соответствии с регулированием дорожного движения;
рассчитать вероятность распознавания, указывающую на вероятность того, что другое транспортное средство распознает регулирование дорожного движения;
сравнивать предсказываемое состояние движения с фактическим состоянием движения; и
предсказывать, что другое транспортное средство выполняет смену полосы движения, в соответствии с результатом сравнения и вероятностью распознавания.
| WO 2017022447 A1, 09.02.2017 | |||
| US 9117098 B2, 25.08.2015 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2014 |
|
RU2660158C1 |

