ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Эта заявка испрашивает приоритет заявки на патент Китая № 201810532267.3 под названием «SERPENTINE SURGICAL INSTRUMENT», поданной 29 мая 2018 г., содержание которой посредством ссылки включено в этот документ во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области медицинских устройств и, в частности, к змеевидному хирургическому инструменту.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В процессе малоинвазивной операции часто применяются хирургические инструменты со змеевидными сочленениями и эндоскопы со змеевидными сочленениями, чтобы можно было обходить другие органы во время хирургической операции, что может обеспечить меньший разрез для лучшего терапевтического эффекта и снизить уровень повреждения других тканей во время операции. Тем не менее направление движения одного конца змеевидного хирургического инструмента является противоположным направлению работы рабочим концом, что увеличивает сложность операции для врачей и хирургические риски.
Более того, несмотря на то, что удерживаемый рукой конец змеевидного хирургического инструмента может быть использован повторно, с одной стороны, срок службы змеевидного хирургического инструмента по-прежнему определяется сроком службы концевого исполнительного элемента, а с другой стороны, современные многоразовые змеевидные хирургические инструменты являются неудобными в отношении послеоперационной чистки и стерилизации. Кроме того, во время хирургической операции необходимо подготавливать несколько змеевидных хирургических инструментов с одинаковыми/разными концевыми исполнительными элементами, что приводит к напрасному расходованию ресурсов и увеличивает нагрузку на пациентов. Более того, большинство современных сменных змеевидных хирургических инструментов являются сложными в конструкции и дорогостоящими.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В разных вариантах осуществления, раскрытых в этом описании, предложен змеевидный хирургический инструмент.
В одном аспекте согласно некоторым вариантам осуществления настоящего изобретения предложен змеевидный хирургический инструмент, содержащий:
удерживаемый рукой конец, содержащий элемент для удерживания, элемент для запястья и элемент для манипулирования, при этом элемент для манипулирования соединен с элементом для удерживания посредством элемента для запястья и элемент для запястья имеет по меньшей мере первую вращательную степень свободы;
сменный компонент, содержащий змеевидный элемент, опорное гнездо для инструмента и концевой исполнительный элемент, которые соединены последовательно, при этом змеевидный элемент имеет пятую вращательную степень свободы;
быстросъемный соединительный элемент, содержащий элемент обеспечения разъемного соединения, при этом элемент обеспечения разъемного соединения содержит первый шарнир Гука, выполненный на элементе для удерживания, и соединитель, выполненный на сменном компоненте; первый шарнир Гука с возможностью отсоединения соединен с соединителем и имеет девятую вращательную степень свободы; и
передаточный компонент, содержащий первую часть и вторую часть, которые расположены соответственно на сменном компоненте и удерживаемом рукой конце, при этом первая часть соединяет соединитель со змеевидным элементом; вторая часть соединяет элемент для запястья с первым шарниром Гука; первая часть выполнена с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения согласно девятому вращательному движению первого шарнира Гука, а вторая часть выполнена с возможностью обеспечения выполнения первым шарниром Гука девятого вращательного движения согласно первому вращательному движению элемента для запястья.
Посредством быстросъемного соединительного элемента, который может обеспечивать быструю замену, обеспечено разъемное соединение удерживаемого рукой конца со сменным компонентом. Посредством быстросъемного соединительного элемента осуществляется передача или прекращение передачи мощности посредством элемента в виде шарнира Гука и соединителя, при этом конструкция является простой.
В одном варианте осуществления элемент для запястья дополнительно имеет вторую вращательную степень свободы;
первый шарнир Гука дополнительно имеет десятую вращательную степень свободы;
вторая часть дополнительно выполнена с возможностью обеспечения выполнения первым шарниром Гука десятого вращательного движения согласно второму вращательному движению элемента для запястья;
змеевидный элемент имеет шестую вращательную степень свободы;
первая часть дополнительно выполнена с возможностью обеспечения выполнения змеевидным элементом шестого вращательного движения согласно десятому вращательному движению первого шарнира Гука.
В одном варианте осуществления первый шарнир Гука выполняет девятое вращательное движение относительно девятой оси, а змеевидный элемент выполняет пятое вращательное движение относительно пятой оси; и
девятая ось параллельна пятой оси.
В одном варианте осуществления первый шарнир Гука выполняет девятое вращательное движение относительно девятой оси, а змеевидный элемент выполняет пятое вращательное движение относительно пятой оси;
первый шарнир Гука выполняет десятое вращательное движение относительно десятой оси, а змеевидный элемент выполняет шестое вращательное движение относительно шестой оси; и
девятая ось параллельна пятой оси, а десятая ось параллельна шестой оси.
В одном варианте осуществления элемент для запястья выполняет первое вращательное движение относительно первой оси и второе вращательное движение относительно второй оси; и
первая ось параллельна пятой оси, а вторая ось параллельна шестой оси.
В одном варианте осуществления первый шарнир Гука содержит внутреннюю рамку и внешнюю рамку; внешняя рамка выполнена с возможностью вращения относительно элемента для удерживания вокруг десятой оси, а внутренняя рамка выполнена с возможностью вращения относительно внешней рамки вокруг девятой оси.
В одном варианте осуществления сменный компонент содержит корпус и пространство, определенное корпусом; соединитель расположен в пространстве и содержит соединительную пластину, которая с возможностью движения расположена относительно корпуса сменного компонента и с возможностью отсоединения соединена с первым шарниром Гука.
В одном варианте осуществления соединитель дополнительно содержит упругий соединительный компонент, посредством которого соединительная пластина прикреплена к корпусу сменного компонента.
В одном варианте осуществления на внутренней рамке первого шарнира Гука предусмотрен по меньшей мере один штифт, при этом штифт содержит основную часть штифта и выступающий элемент, выполненный в осевом направлении основной части штифта. Внешний диаметр выступающего элемента больше, чем внешний диаметр основной части штифта. Соединитель содержит соединительную пластину, с возможностью вращения соединенную со сменным компонентом. В месте на соединительной пластине, соответствующем штифту, выполнено отверстие под штифт, при этом отверстие под штифт содержит часть с большим диаметром и часть с малым диаметром, которые расположены рядом друг с другом и накладываются друг на друга. Размер части с большим диаметром выбран соответствующим внешнему диаметру выступающего элемента; часть с малым диаметром имеет по меньшей мере часть, которая выполнена соответствующей внешнему диаметру основной части штифта; и размер места накладывания части с большим диаметром на часть с малым диаметром выбран таким, который позволяет проходить основной части штифта.
В одном варианте осуществления первая часть передаточного компонента содержит первую группу передаточных проволок и вторую группу передаточных проволок, а вторая часть передаточного компонента содержит третью группу передаточных проволок и четвертую группу передаточных проволок. Проксимальные концы третьей группы передаточных проволок и четвертой группы передаточных проволок соединены с элементом для запястья, а дистальные концы третьей группы передаточных проволок и четвертой группы передаточных проволок соединены с первым шарниром Гука; проксимальные концы первой группы передаточных проволок и второй группы передаточных проволок соединены с соединительной пластиной, а дистальные концы первой группы передаточных проволок и второй группы передаточных проволок соединены со змеевидным элементом. Посредством первой группы передаточных проволок и второй группы передаточных проволок змеевидный элемент управляется для выполнения им пятого вращательного движения согласно девятому вращательному движению первого шарнира Гука и управляет змеевидным элементом для выполнения им шестого вращательного движения согласно десятому вращательному движению первого шарнира Гука. Посредством третьей группы передаточных проволок и четвертой группы передаточных проволок первый шарнир Гука управляется для выполнения им девятого вращательного движения согласно первому вращательному движению элемента для запястья и управляет первым шарниром Гука для выполнения им второго вращательного движения согласно десятому вращательному движению элемента для запястья.
В одном варианте осуществления фиксированные соединительные точки дистальных концов первой группы передаточных проволок и второй группы передаточных проволок на змеевидном элементе расположены соответственно фиксированным соединительным точкам проксимальных концов первой группы передаточных проволок и второй группы передаточных проволок на соединительной пластине; и фиксированные соединительные точки между дистальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и внутренней рамкой первого шарнира Гука расположены напротив фиксированных соединительных точек между проксимальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и элементом для запястья; или
фиксированные соединительные точки дистальных концов первой группы передаточных проволок и второй группы передаточных проволок на змеевидном элементе расположены напротив фиксированных соединительных точек проксимального конца первой группы передаточных проволок и второй группы передаточных проволок на соединительной пластине; и фиксированные соединительные точки между дистальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и внутренней рамкой первого шарнира Гука расположены соответственно фиксированным соединительным точкам между проксимальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и элементом для запястья.
В одном варианте осуществления фиксированные соединительные точки дистальных концов первой группы передаточных проволок и второй группы передаточных проволок на змеевидном элементе последовательно соединены с образованием первого прямоугольника, при этом одна сторона первого прямоугольника параллельна пятой оси, а другая сторона параллельна шестой оси;
фиксированные соединительные точки проксимальных концов первой группы передаточных проволок и второй группы передаточных проволок на соединительной пластине последовательно соединены с образованием второго прямоугольника, при этом одна сторона второго прямоугольника параллельна пятой оси, а другая сторона параллельна шестой оси;
фиксированные соединительные точки между дистальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и внутренней рамкой первого шарнира Гука последовательно соединены с образованием третьего прямоугольника, при этом одна сторона третьего прямоугольника параллельна девятой оси, а другая сторона параллельна десятой оси; и
фиксированные соединительные точки между проксимальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и элементом для запястья последовательно соединены с образованием четвертого прямоугольника, при этом одна сторона четвертого прямоугольника параллельна первой оси, а другая сторона параллельна второй оси.
В одном варианте осуществления, концевой исполнительный элемент содержит по меньшей мере один рабочий конец, который с возможностью вращения соединен с опорным гнездом для инструмента; удерживаемый рукой конец дополнительно содержит компонент управления открыванием и закрыванием, который выполнен с возможностью движения относительно элемента для манипулирования; передаточный компонент дополнительно содержит первый гибкий элемент; и компонент управления открыванием и закрыванием управляет вращением рабочего конца посредством первого гибкого элемента.
В одном варианте осуществления быстросъемный соединительный элемент дополнительно содержит первый соединительный вал и первый упругий телескопический опорный элемент, с возможностью отсоединения соединенный с первым соединительным валом, при этом первый соединительный вал проходит в направлении проксимального конца и через соединитель, а первый упругий телескопический опорный элемент проходит в направлении дистального конца и через первый шарнир Гука. Элемент для удерживания дополнительно снабжен первым электродвигателем, первым датчиком и контроллером, при этом первый датчик выполнен с возможностью обнаружения движения открывания и закрывания компонента управления открыванием и закрыванием, и контроллер управляет первым электродвигателем для выработки мощности согласно сигналу, обнаруженному первым датчиком. Первый электродвигатель приводит первый гибкий элемент в действие посредством первого упругого телескопического опорного элемента и первого соединительного вала.
В одном варианте осуществления торцевая поверхность первого упругого телескопического опорного элемента снабжена фиксирующим выступом; торцевая поверхность первого соединительного вала снабжена фиксирующим пазом, с которым фиксирующий выступ выполнен с возможностью входа в зацепление, и за счет взаимодействия фиксирующего выступа с фиксирующим пазом обеспечено разъемное соединение первого упругого телескопического опорного элемента с первым соединительным валом.
В одном варианте осуществления первый упругий телескопический опорный элемент содержит пружину сжатия, внутренний цилиндр и внешний цилиндр, расположенный вокруг внутреннего цилиндра, при этом внутренний цилиндр соединен с выходным валом первого электродвигателя; внешний цилиндр выполнен с возможностью движения в осевом направлении относительно внутреннего цилиндра; и пружина сжатия выполнена с возможностью обеспечения движущего усилия, обеспечивающего движение внешнего цилиндра в направлении от внутреннего цилиндра.
В одном варианте осуществления концевой исполнительный элемент дополнительно содержит первый реверсивный компонент, а первый гибкий элемент содержит стальную проволоку и упругий элемент, который выполнен с возможностью обеспечения движущего усилия, которое удерживает рабочий конец в нормально открытом состоянии. Проксимальный конец стальной проволоки намотан на первом соединительном валу; дистальный конец стальной проволоки соединен с первым реверсивным компонентом; и первый реверсивный компонент предназначен для обеспечения преобразования в отношении поступательного движения стальной проволоки и движения открывания и закрывания рабочего конца.
В одном варианте осуществления концевой исполнительный элемент дополнительно содержит второй реверсивный компонент и третий реверсивный компонент. Первый гибкий элемент содержит гибкий вал. Первый соединительный вал соединен со вторым реверсивным компонентом. Проксимальный конец гибкого вала закреплен на втором реверсивном компоненте, а дистальный конец гибкого вала соединен с третьим реверсивным компонентом для приведения рабочего конца в действие с обеспечением движения открывания и закрывания. Третий реверсивный компонент выполнен с возможностью преобразования поступательного движения гибкого вала в движение открывания и закрывания рабочего конца, а второй реверсивный компонент выполнен с возможностью преобразования вращательного движения первого соединительного вала в поступательное движение гибкого вала.
В одном варианте осуществления компонент управления открыванием и закрыванием содержит по меньшей мере один элемент для открывания и закрывания, который с возможностью вращения соединен с элементом для манипулирования, при этом первый датчик представляет собой датчик Холла, расположенный на элементе для открывания и закрывания или элементе для манипулирования, или первый датчик представляет собой кодирующий диск вращающегося вала, расположенный на вращающемся валу элемента для открывания и закрывания.
В одном варианте осуществления элемент для манипулирования выполнен с возможностью вращения вокруг собственной оси относительно элемента для запястья, а опорное гнездо для инструмента выполнено с возможностью вращения вокруг собственной оси относительно змеевидного элемента. Передаточный компонент дополнительно содержит второй гибкий передаточный элемент для передачи вращения элемента для манипулирования на опорное гнездо для инструмента с обеспечением вращения опорного гнезда для инструмента вокруг собственной оси.
В одном варианте осуществления быстросъемный соединительный элемент дополнительно содержит второй соединительный вал и второй упругий телескопический опорный элемент, с возможностью отсоединения соединенный со вторым соединительным валом, при этом второй соединительный вал проходит в направлении дистального конца и через первый шарнир Гука, а второй упругий телескопический опорный элемент проходит в направлении проксимального конца и через соединитель. Элемент для удерживания дополнительно снабжен вторым электродвигателем, вторым датчиком и контроллером, при этом второй датчик выполнен с возможностью обнаружения вращения элемента для манипулирования; контроллер управляет вторым электродвигателем для выработки мощности согласно сигналу, обнаруженному вторым датчиком. Второй электродвигатель приводит второй гибкий элемент в действие посредством второго упругого телескопического опорного элемента и второго соединительного вала.
В одном варианте осуществления второй гибкий элемент представляет собой гибкий вал, и два конца гибкого вала соответственно прочно соединены со вторым соединительным валом и опорным гнездом для инструмента.
В одном варианте осуществления элемент для запястья снабжен неподвижной опорой, и второй датчик представляет собой кодирующий диск вращающегося вала, расположенный на неподвижной опоре.
В одном варианте осуществления быстросъемный соединительный элемент дополнительно содержит элемент для фиксации защелкиванием, выполненный с возможностью ограничения вращения первого шарнира Гука и соединителя в окружном направлении сменного компонента.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На фиг. 1 представлено схематическое изображение змеевидного хирургического инструмента со степенями свободы движения согласно одному варианту осуществления настоящего изобретения;
на фиг. 2 представлено схематическое изображение разборки змеевидного хирургического инструмента согласно одному варианту осуществления настоящего изобретения;
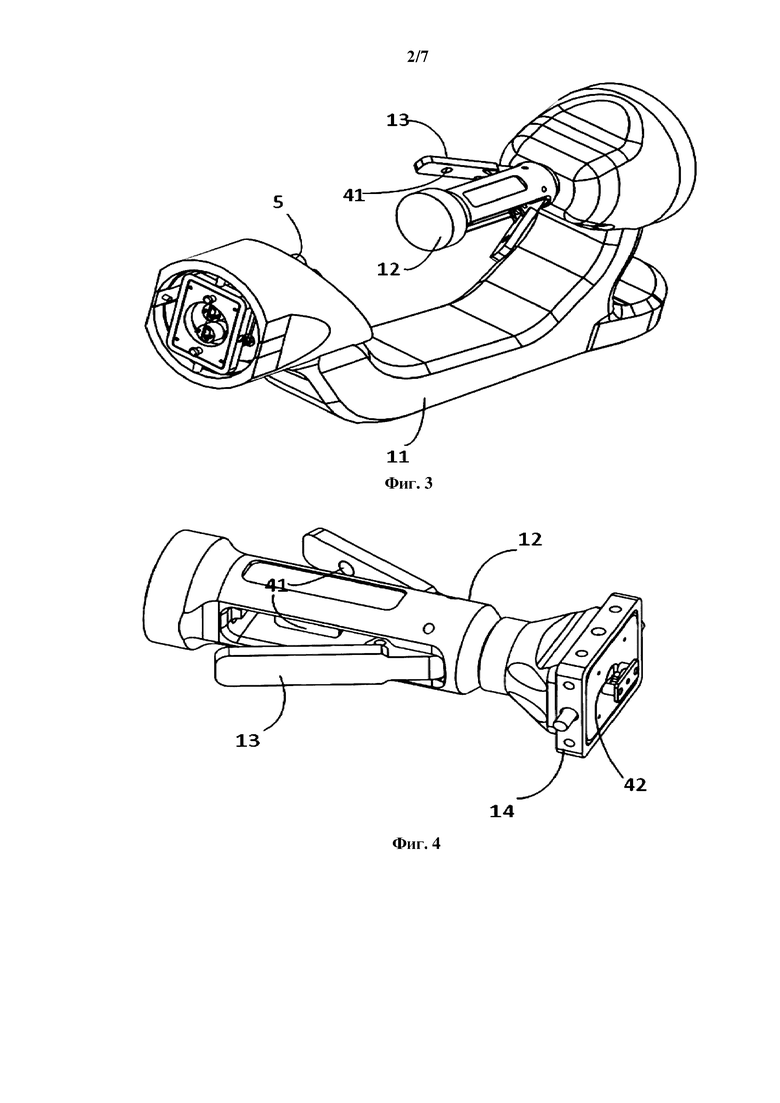
на фиг. 3 представлено схематическое изображение удерживаемого рукой конца змеевидного хирургического инструмента согласно одному варианту осуществления настоящего изобретения;
на фиг. 4 представлено схематическое изображение элемента для манипулирования согласно одному варианту осуществления настоящего изобретения;
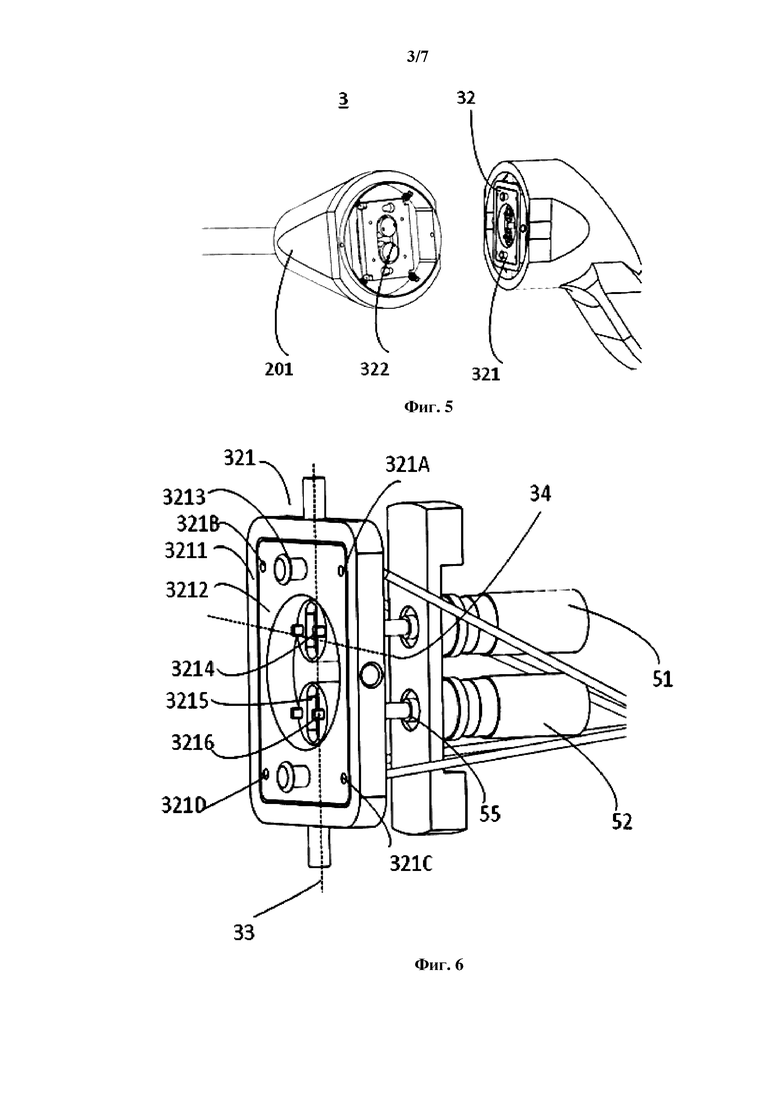
на фиг. 5 представлено схематическое изображение быстросъемного соединительного элемента согласно одному варианту осуществления настоящего изобретения;
на фиг. 6 представлено схематическое изображение элемента обеспечения разъемного соединения со стороны удерживаемого рукой конца согласно одному варианту осуществления настоящего изобретения;
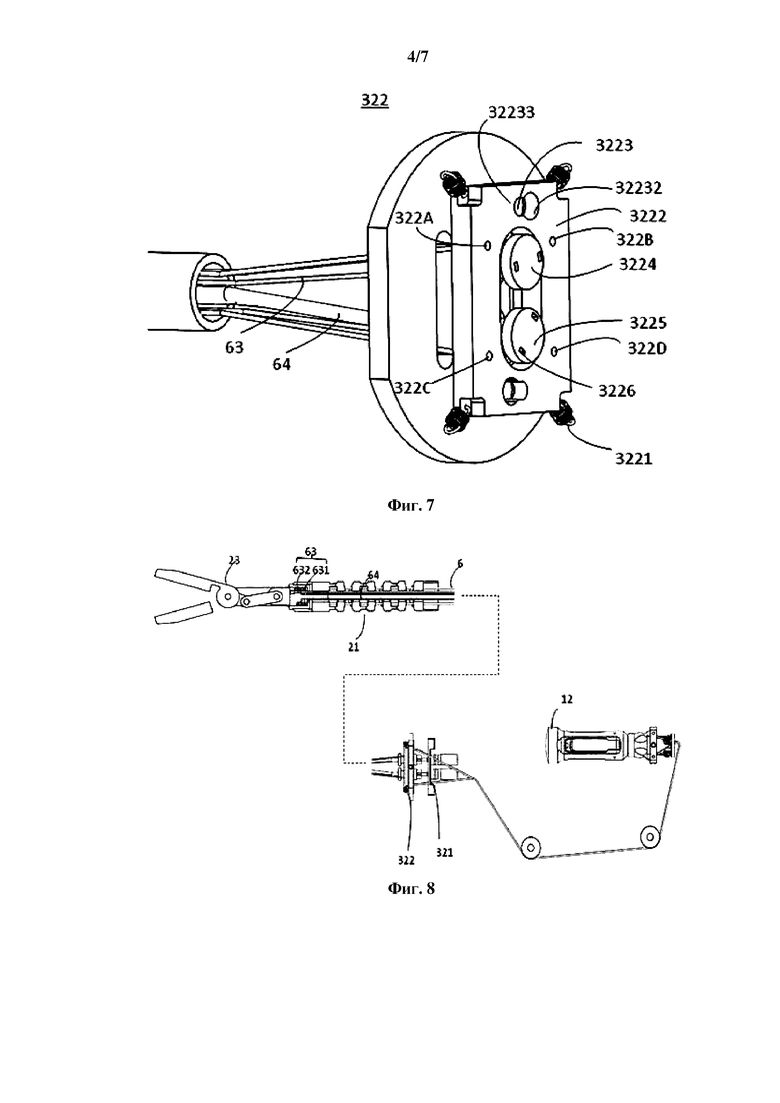
на фиг. 7 представлено схематическое изображение элемента обеспечения разъемного соединения со стороны сменного компонента согласно одному варианту осуществления настоящего изобретения;
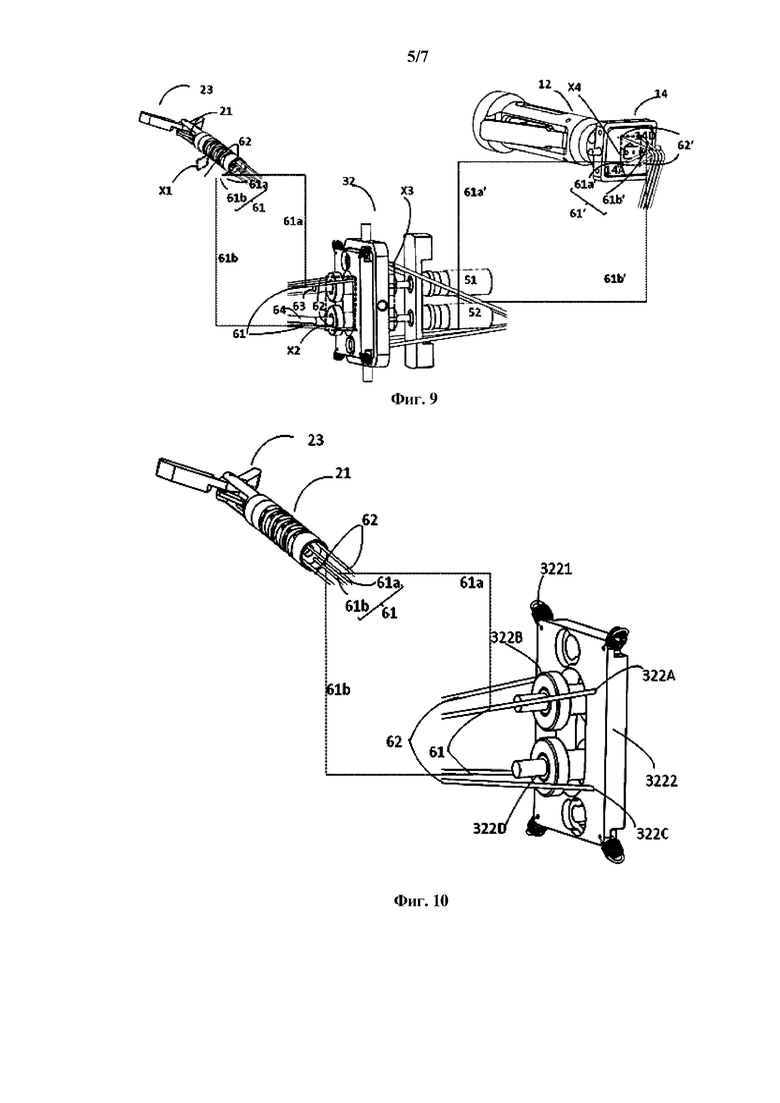
на фиг. 8 и 9 представлены схематические изображения передаточного компонента согласно одному варианту осуществления настоящего изобретения;
на фиг. 10 представлено схематическое изображение соединения элемента обеспечения разъемного соединения со стороны сменного компонента с группой передаточных проволок согласно одному варианту осуществления настоящего изобретения;
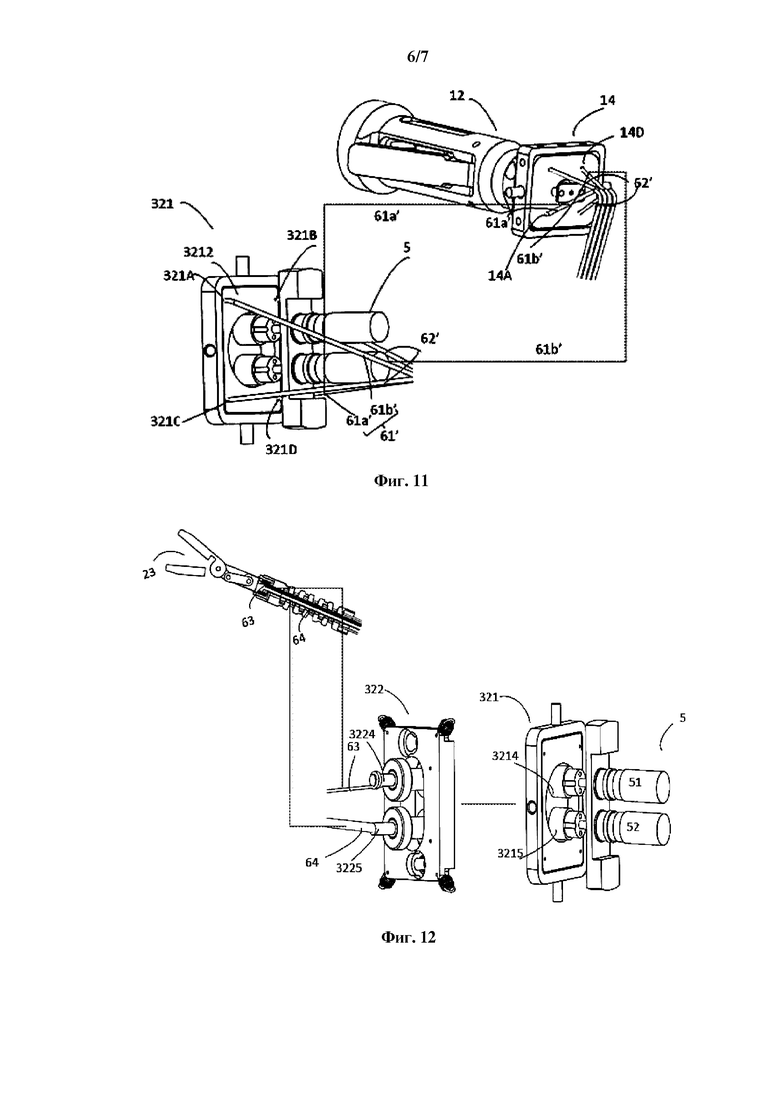
на фиг. 11 представлено схематическое изображение соединения элемента обеспечения разъемного соединения со стороны удерживаемого рукой конца с группой передаточных проволок согласно одному варианту осуществления настоящего изобретения;
на фиг. 12 представлено схематическое изображение соединения элемента обеспечения разъемного соединения с гибким передаточным элементом согласно одному варианту осуществления настоящего изобретения;
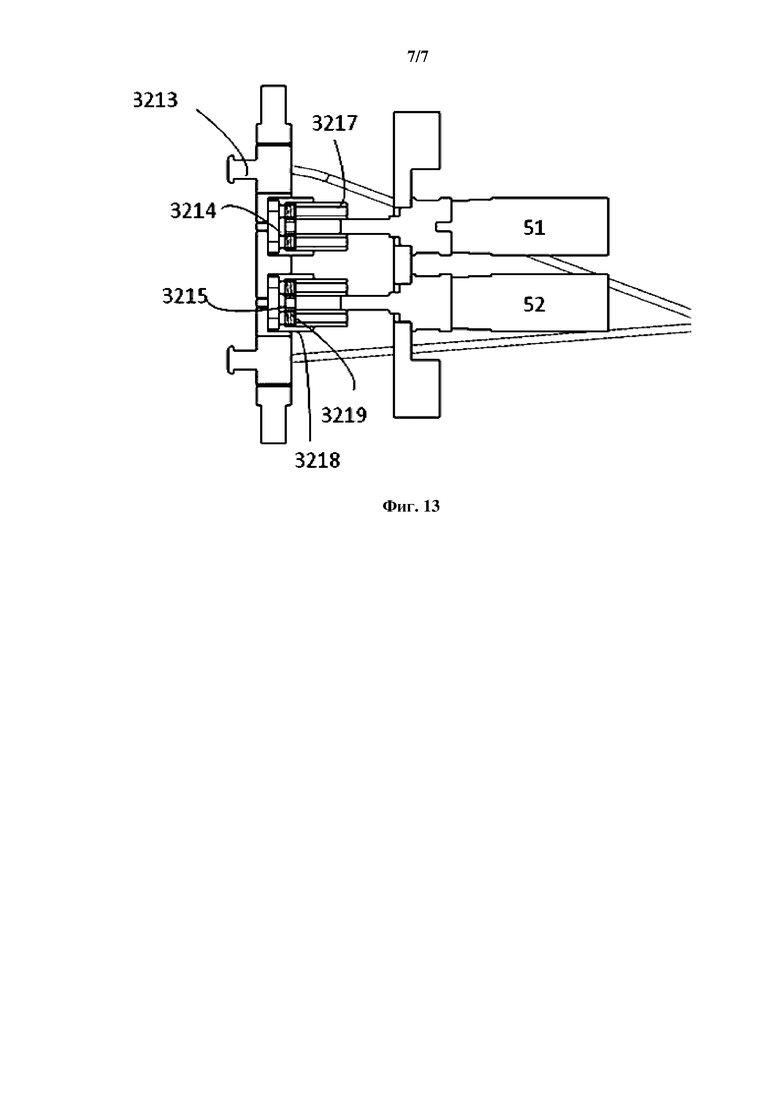
на фиг. 13 представлено схематическое изображение соединения элемента обеспечения разъемного соединения со стороны удерживаемого рукой конца с приводным элементом согласно одному варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже со ссылкой на прилагаемые графические материалы будут подробно описаны варианты осуществления настоящего изобретения, так что указанные выше цели, признаки и преимущества настоящего изобретения будут более ясными и понятными. В нижеследующем описании объясняется много конкретных подробностей для обеспечения полного понимания настоящего изобретения. Тем не менее различные варианты осуществления настоящего изобретения могут быть реализованы многими другими способами, которые отличаются от описанных в этом документе, и специалисты в данной области техники без отклонения от идеи настоящего изобретения могут вносить подобные улучшения. Поэтому настоящее изобретение не ограничивается конкретными вариантами осуществления, раскрытыми далее.
Ниже со ссылкой на графические материалы и конкретные варианты осуществления будет дополнительно подробно описан змеевидный хирургический инструмент, предложенный в одном варианте осуществления настоящего изобретения. В настоящем изобретении для простоты понимания применяются термины «проксимальный конец» и «дистальный конец», «верхний конец» и «нижний конец», и эти термины относятся к относительной ориентации, относительному положению и направлению элементов или действий относительно друг друга, как это видит врач, использующий медицинские инструменты. Термины «проксимальный конец», «дистальный конец», «верхний конец» и «нижний конец» не являются ограничительными, но при этом термины «проксимальный конец» и «нижний конец» относятся к концу медицинского оборудования, который во время обычной эксплуатации находится близко к оперирующему хирургу, а термины «дистальный конец» и «верхний конец» относятся к концу, находящемуся от оперирующего хирурга далеко.
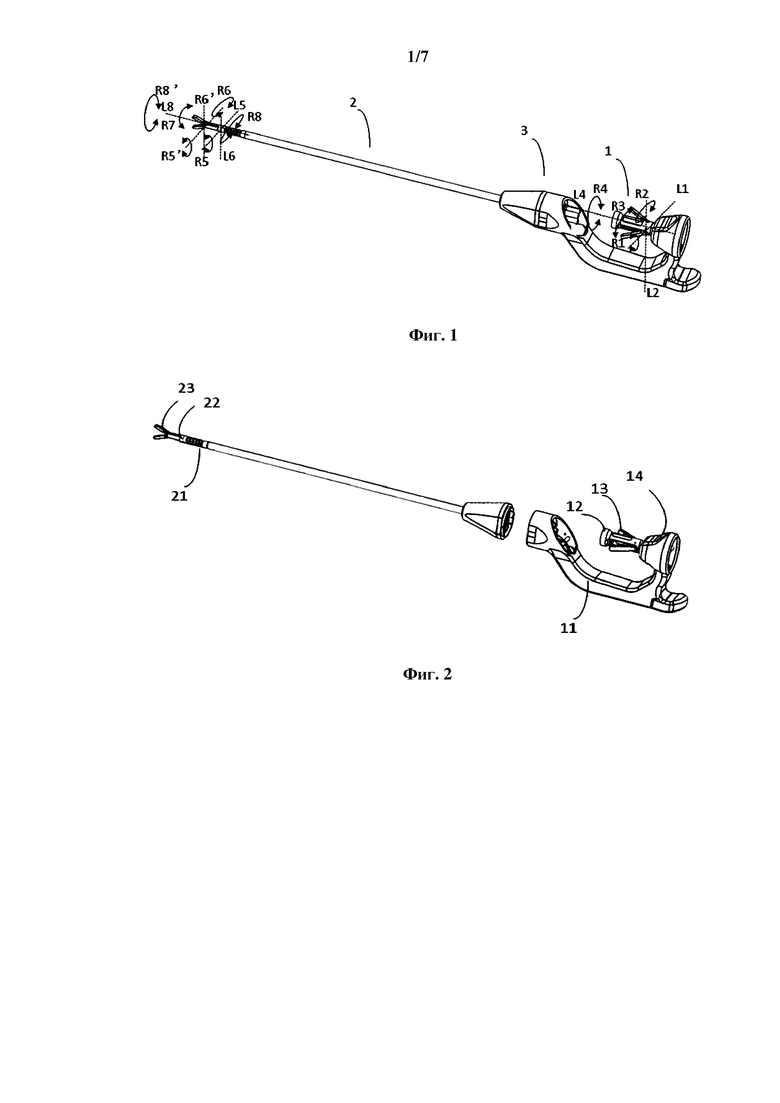
Как показано на фиг. 1 и 2, змеевидный хирургический инструмент согласно настоящему изобретению содержит удерживаемый рукой конец 1, сменный компонент 2 и быстросъемный соединительный элемент 3. Удерживаемый рукой конец 1 змеевидного хирургического инструмента является многоразовым. Сменный компонент 2 выполнен одноразовым или выполнен для использования в течение ограниченного периода времени. Удерживаемый рукой конец 1 и сменный компонент 2 можно быстро разъединять и менять посредством быстросъемного соединительного элемента 3.
Кроме того, удерживаемый рукой конец 1 содержит элемент 11 для удерживания, элемент 12 для манипулирования и элемент 14 для запястья. Элемент 12 для манипулирования соединен с элементом 11 для удерживания через элемент 14 для запястья. Поскольку элемент 14 для запястья может иметь более чем одну вращательную степень свободы, элемент 12 для манипулирования может вращаться в нескольких разных направлениях относительно элемента 11 для удерживания. Элемент 12 для манипулирования может также быть выполнен с возможностью вращения вокруг собственной оси относительно элемента 14 для запястья. Сменный компонент 2 содержит змеевидный элемент 21, опорное гнездо 22 для инструмента и концевой исполнительный элемент 23, которые соединены последовательно.
На фиг. 1 также показаны степени свободы движения змеевидного хирургического инструмента. В варианте осуществления, показанном на фиг. 1, элемент 12 для манипулирования может приводить змеевидный элемент 21 в движение и тем самым приводить в движение концевой исполнительный элемент 23. В этом варианте осуществления направление движения змеевидного элемента 21 также задано таким же, что и направление движения элемента 12 для манипулирования удерживаемого рукой конца 1. В частности, элемент 14 для запястья имеет две степени свободы, например первую вращательную степень свободы R1 и вторую вращательную степень свободы R2, то есть элемент 14 для запястья может выполнять первое вращательное движение относительно первой оси L1 (в этом варианте осуществления — движение подъема и опускания) и второе вращательное движение относительно второй оси L2 (в этом варианте осуществления — движение отклонения). Змеевидный элемент 21 имеет две вращательные степени свободы, например пятую вращательную степень свободы R5 и шестую вращательную степень свободы R6, то есть змеевидный элемент 21 может выполнять пятое вращательное движение относительно пятой оси L5 (в этом варианте осуществления — движение подъема и опускания) и шестое вращательное движение относительно шестой оси L6 (в этом варианте осуществления — движение отклонения). Кроме того, элемент 12 для манипулирования заставляет элемент 14 для запястья осуществлять движение подъема и опускания относительно первой оси L1 и заставляет змеевидный элемент 21 совершать движение подъема и опускания в том же направлении относительно соответствующей пятой оси L5 и тем самым заставляет концевой исполнительный элемент 23 совершать движение подъема и опускания в том же направлении, что и змеевидный элемент 21. В этот момент первая ось L1 может быть параллельна пятой оси L5. Элемент 12 для манипулирования заставляет элемент 14 для запястья выполнять движение отклонения относительно второй оси L2 и заставляет змеевидный элемент 21 совершать движение отклонения в том же направлении относительно соответствующей шестой оси L6, в результате чего заставляет концевой исполнительный элемент 23 совершать движение отклонения в том же направлении. В этот момент вторая ось L2 может быть параллельна шестой оси L6. Таким образом, концевой исполнительный элемент 23 имеет две степени свободы R5’ и R6’.
В этом варианте осуществления в отношении концевого исполнительного элемента 23 нет особых ограничений, и он может быть выбран врачом в зависимости от особенностей хирургической операции. Например, концевой исполнительный элемент 23 может быть ножницами, щипцами, зажимами, пинцетами и другими концевыми исполнительными элементами с несколькими рабочими концами, или им также могут быть другие электродинамические концевые исполнительные элементы, такие как резистивный нагреватель, приводимые электродвигателем компоненты и т. д. Разумеется, в зависимости от того, что нужно врачу, концевой исполнительный элемент 23 может также быть выбран других форм, например концевой исполнительный элемент с одним рабочим концом, такой как крюк.
Ввиду разных типов концевых исполнительных элементов 23 змеевидные хирургические инструменты могут иметь разные степени свободы. Например, концевой исполнительный элемент 23 содержит по меньшей мере один рабочий конец, который с возможностью вращения соединен с опорным гнездом 22 для инструмента. В этом случае концевой исполнительный элемент 23 получает одну степень свободы. В одном варианте осуществления, как показано на фиг. 1, концевой исполнительный элемент 23 может быть пинцетом. Поэтому концевой исполнительный элемент 23 дополнительно имеет третью степень свободы, такую как степень свободы R7 для открывания и закрывания, чтобы выполнялось зажатие. Как показано на фиг. 3, соответственно, удерживаемый рукой конец 1 дополнительно содержит компонент 13 управления открыванием и закрыванием, расположенный на элементе 12 для манипулирования, и компонент 13 управления открыванием и закрыванием может вращаться относительно элемента 12 для манипулирования с обеспечением третьей степени свободы R3, за счет чего происходит управление движением открывания и закрывания концевого исполнительного элемента 23. Геометрия движения компонента 13 управления открыванием и закрыванием удерживаемого рукой конца 1 может быть задана такой же, что и у концевого исполнительного элемента 23, то есть когда компонент 13 управления открыванием и закрыванием открывается, то происходит открывание концевого исполнительного элемента 23, а когда компонент 13 управления открыванием и закрыванием закрывается, то происходит закрывание концевого исполнительного элемента 23, в результате чего зажатие завершается.
В другом варианте осуществления элемент 12 для манипулирования удерживаемого рукой конца 1 может также иметь четвертую вращательную степень свободы R4, то есть элемент 12 для манипулирования может быть выполнен с возможностью вращения вокруг собственной оси L4 относительно элемента 14 для запястья. Соответственно, опорное гнездо 22 для инструмента имеет восьмую вращательную степень свободы R8, то есть опорное гнездо 22 для инструмента может быть выполнено с возможностью вращения вокруг собственной оси L8 относительно змеевидного элемента 21. Когда элемент 12 для манипулирования вращается вокруг собственной оси, он может приводить опорное гнездо 22 для инструмента во вращение вокруг собственной оси L8 с получением восьмой вращательной степени свободы R8, так что концевой исполнительный элемент 23 имеет четвертую степень свободы R8’.
Как показано на фиг. 5, быстросъемный соединительный элемент 3 содержит элемент 32 обеспечения разъемного соединения. Элемент 32 обеспечения разъемного соединения содержит первый шарнир Гука 321, расположенный на стороне удерживаемого рукой конца 1, и соединитель 322, расположенный на стороне сменного компонента 2.
Кроме того, между удерживаемым рукой концом 1 и сменным компонентом 2 также предусмотрен элемент для фиксации защелкиванием для ограничения относительного движения между ними в окружном и осевом направлениях. В настоящем изобретении в отношении конкретной конструкции элемента для фиксации защелкиванием нет особых ограничений, и это может быть любая конструкция, способная выполнять функции фиксации и ограничения. Например, элемент для фиксации защелкиванием содержит часть для фиксации защелкиванием, расположенную на элементе 11 для удерживания удерживаемого рукой конца 1, а сменный компонент 2 снабжен соединяемой защелкиванием частью, которая соединяется с частью для фиксации защелкиванием или отсоединяется от нее. Элемент для удерживания также снабжен упругим элементом для удерживания части для фиксации защелкиванием в состоянии соединения. Например, в одном конкретном варианте осуществления часть для фиксации защелкиванием представляет собой фиксатор. Один конец фиксатора с возможностью вращения соединен с удерживаемым рукой концом 1, и между фиксатором и удерживаемым рукой концом 1 предусмотрена торсионная пружина. Другой конец фиксатора снабжен выступом. Соответственно, сменный компонент 2 снабжен прорезью для фиксации, с которой входит в зацепление выступ на фиксаторе, за счет чего предотвращается относительное движение между удерживаемым рукой концом 1 и сменным компонентом 2. Когда удерживаемый рукой конец 1 необходимо соединить со сменным компонентом 2 в целях сборки, фиксатор вращается против сопротивления торсионной пружины, так что удерживаемый рукой конец 1 соединяется со сменным компонентом 2, и затем фиксатор высвобождается, выступ на фиксаторе входит в зацепление с прорезью для фиксации под действием силы упругости торсионной пружины, так что удерживаемый рукой конец 1 и сменный компонент 2 соединяются друг с другом.
Как показано на фиг. 6 и 7, элемент 32 обеспечения разъемного соединения содержит первый шарнир Гука 321, расположенный на стороне удерживаемого рукой конца 1, и соединитель 322, расположенный на стороне сменного компонента 2. Первый шарнир Гука 321 содержит внешнюю рамку 3211 первого шарнира Гука и внутреннюю рамку 3212 первого шарнира Гука, и внешняя рамка 3211 первого шарнира Гука соединена с кожухом удерживаемого рукой конца 1 и может выполнять десятое вращательное движение относительно десятой оси 33. Внутренняя рамка 3212 первого шарнира Гука соединена с внешней рамкой 3211 первого шарнира Гука и может выполнять девятое вращательное движение относительно девятой оси 34. Десятая ось 33 может быть параллельна шестой оси L6. Кроме того, десятая ось 33 может также быть параллельна второй оси L2. Девятая ось 34 параллельна пятой оси L5. Кроме того, девятая ось 34 может также быть параллельна первой оси L1. Как показано на фиг. 5, сменный компонент 2 содержит корпус 201 и пространство, определенное корпусом 201. В пространстве расположен соединитель 322. Соединитель 322 содержит упругий соединительный компонент и соединительную пластину 3222, которая соединена на корпусе сменного компонента 2 посредством упругого соединительного компонента, так что соединительная пластина 3222 может выполнять движение отклонения относительно корпуса сменного компонента 2. Кроме того, внешние края соединительной пластины 3222 не больше внешних краев внутренней рамки 3212 первого шарнира Гука. Упругий соединительный компонент представляет собой упругий элемент, такой как пружина натяжения или пружина сжатия. Благодаря упругому соединительному компоненту соединительная пластина 3222 может сохранять расстояние от корпуса сменного компонента 2, и во время использования соединительная пластина 3222 может двигаться синхронно с первым шарниром Гука 321. В варианте осуществления, показанном на фиг. 7, упругий соединительный компонент содержит четыре соединительные пружины 3221, которые расположены соответственно в областях четырех углов соединительной пластины 3222. Соединительная пластина 3222 расположена в пространстве, определенном корпусом сменного компонента 2, посредством соединительных пружин 3221.
Как показано на фиг. 6 и 7, на внутренней рамке 3212 первого шарнира Гука предусмотрен ограничительный элемент для предотвращения взаимного перемещения между первым шарниром Гука 321 и соединителем 322 в осевом направлении сменного компонента 2. Ограничительный элемент может быть по меньшей мере одним штифтом 3213. Штифт 3213 содержит основную часть штифта и выступающий элемент, выполненный в осевом направлении основной части штифта. Внешний диаметр у выступающего элемента больше, чем у основной части штифта. Соответственно, в месте на соединительной пластине 3222, соответствующем штифту 3213, выполнено тыквоподобное отверстие 3223 под штифт. Тыквоподобное отверстие 3223 под штифт содержит часть 32232 с большим диаметром и часть 32233 с малым диаметром. Диаметр отверстия части 32232 с большим диаметром тыквоподобного отверстия 3223 под штифт соответствует внешнему диаметру выступающего элемента на штифте 3213 для размещения штифта 3213. Диаметр отверстия части 32233 с малым диаметром тыквоподобного отверстия 3223 под штифт по меньшей мере частично соответствует внешнему диаметру основной части штифта. То есть часть 32233 с малым диаметром тыквоподобного отверстия 3223 под штифт может быть отверстием с изменяющимися диаметрами, при этом больший диаметр соответствует внешнему диаметру выступающего элемента, а меньший диаметр соответствует внешнему диаметру основной части штифта. В качестве альтернативы часть 32233 с малым диаметром тыквоподобного отверстия 3223 под штифт представляет собой отверстие, которое соответствует внешнему диаметру основной части штифта. То есть диаметр отверстия части 32233 с малым диаметром тыквоподобного отверстия 3223 под штифт изменяется в осевом направлении, но по меньшей мере часть диаметров отверстия больше или равна внешнему диаметру основной части штифта и меньше, чем внешний диаметр выступающего элемента, для предотвращения движения штифта 3213 в осевом направлении. Кроме того, размер места накладывания части с большим диаметром на часть с малым диаметром выбран таким, чтобы могла проходить основная часть штифта.
В установленном состоянии штифт 3213 на внутренней рамке 3212 первого шарнира Гука установлен в части 32233 с малым диаметром тыквоподобного отверстия 3223 под штифт. В частности, при соединении удерживаемого рукой конца 1 со сменным компонентом 2 фиксатор нажимается, и часть 32232 с большим диаметром тыквоподобного отверстия 3223 под штифт соединителя 322 выравнивается со штифтом 3213 первого шарнира Гука. Штифт 3213 с выступающим элементом вставляется со стороны части 32232 с большим диаметром тыквоподобного отверстия 3223 под штифт. Затем сменный компонент 2/удерживаемый рукой конец 1 вращается, так что штифт 3213 с выступающим элементом ввинчивается в часть 32233 с малым диаметром тыквоподобного отверстия 3223 под штифт для ограничения относительного движения между первым шарниром Гука 321 и соединителем 322 в осевом направлении сменного компонента 2. В этот же момент высвобождается фиксатор удерживаемого рукой конца 1, так что фиксатор на кожухе удерживаемого рукой конца 1 устанавливается в прорези для фиксации 24 на корпусе сменного компонента 2. Посредством элемента для фиксации защелкиванием ограничиваются движения удерживаемого рукой конца 1 и сменного компонента 2 в окружном и осевом направлениях сменного компонента 2, так что удерживаемый рукой конец 1 и сменный компонент 2 фиксируются посредством быстросъемного соединительного элемента 3.
Как показано на фиг. 8, змеевидный хирургический инструмент также содержит сенсорное устройство, контроллер, приводное устройство 5 и передаточный компонент 6. Сенсорное устройство, контроллер и приводное устройство 5 расположены на удерживаемом рукой конце 1, а передаточный компонент 6 расположен в пространстве, ограниченном полостью элемента 11 для удерживания и корпусом 201 сменного компонента 2. Элемент 12 для манипулирования удерживаемого рукой конца 1 управляет движением подъема и опускания и движением отклонения концевого исполнительного элемента 23 посредством передаточного компонента 6. Сенсорное устройство с возможностью связи соединено с контроллером для обнаружения движения открывания и закрывания компонента 13 управления открыванием и закрыванием и/или вращения элемента 12 для манипулирования, а также для передачи обнаруженного сигнала движения в контроллер. Контроллер управляет приводным устройством 5 для выработки мощности согласно сигналу, обнаруженному сенсорным устройством. Посредством передаточного компонента 6 приводное устройство 5 управляет концевым исполнительным элементом 23 с обеспечением движения открывания и закрывания и/или опорным гнездом 22 для инструмента с обеспечением вращения вокруг собственной оси L8. Кроме того, направления движения концевого исполнительного элемента 23 и опорного гнезда 22 для инструмента являются такими же, что и направления движения компонента 13 управления открыванием и закрыванием и элемента 12 для манипулирования.
На фиг. 8 и 9 представлены схематические изображения передаточного компонента 6. Передаточный компонент 6 содержит первую часть и вторую часть, которые расположены соответственно в сменном компоненте 2 и в удерживаемом рукой конце 1. Первая часть соединяет соединитель 322 со змеевидным элементом 21, тогда как вторая часть соединяет элемент 14 для запястья с первым шарниром Гука 321. Первая часть выполнена с возможностью обеспечения выполнения змеевидным элементом 21 пятого вращательного движения с девятым вращательным движением первого шарнира Гука 321 и обеспечения выполнения змеевидным элементом 21 шестого вращательного движения согласно десятому вращательному движению первого шарнира Гука 321. Вторая часть выполнена с возможностью обеспечения выполнения первым шарниром Гука 321 девятого вращательного движения согласно первому вращательному движению элемента 14 для запястья и обеспечения выполнения первым шарниром Гука 321 десятого вращательного движения согласно второму вращательному движению элемента 14 для запястья.
Кроме того, первая часть содержит первую группу 61 передаточных проволок и вторую группу 62 передаточных проволок, тогда как вторая часть содержит третью группу 61’ передаточных проволок и четвертую группу 62’ передаточных проволок. Первая группа 61 передаточных проволок и вторая группа 62 передаточных проволок расположены со стороны сменного компонента, а третья группа 61’ передаточных проволок и четвертая группа 62’ передаточных проволок расположены со стороны удерживаемого рукой конца. Элемент 12 для манипулирования удерживаемого рукой конца 1 управляет движением подъема и опускания и движением отклонения змеевидного элемента 21 посредством первой группы 61 передаточных проволок, второй группы 62 передаточных проволок, третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок.
Кроме того, проксимальные концы третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок соединены с элементом 14 для запястья, а дистальные концы соединены с внутренней рамкой 3212 первого шарнира Гука 321. Проксимальные концы первой группы 61 передаточных проволок и второй группы 62 передаточных проволок соединены с соединительной пластиной 3222, а дистальные концы первой группы 61 передаточных проволок и второй группы 62 передаточных проволок соединены со змеевидным элементом 21.
Кроме того, фиксированные соединительные точки дистальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на змеевидном элементе 21 последовательно соединены с образованием первого прямоугольника X1. Одна сторона первого прямоугольника X1 параллельна пятой оси L5, а другая сторона первого прямоугольника X1 параллельна шестой оси L6. Фиксированные соединительные точки проксимальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на змеевидном элементе 3222 последовательно соединены с образованием второго прямоугольника X2. Одна сторона второго прямоугольника X2 параллельна пятой оси L5, а другая сторона второго прямоугольника X2 параллельна шестой оси L6. В то же время фиксированные соединительные точки между дистальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и внутренней рамкой первого шарнира Гука 321 последовательно соединены с образованием третьего прямоугольника X3. Одна сторона третьего прямоугольника X3 параллельна девятой оси 34, а другая сторона третьего прямоугольника X3 параллельна десятой оси 33. Фиксированные соединительные точки между проксимальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и элементом 14 для запястья последовательно соединены с образованием четвертого прямоугольника X4. Одна сторона четвертого прямоугольника X4 параллельна первой оси L1, а другая сторона четвертого прямоугольника X4 параллельна второй оси L2.
Кроме того, фиксированные соединительные точки дистальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на змеевидном элементе 21 расположены соответственно фиксированным соединительным точкам проксимальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на соединительной пластине 3222. В то же время фиксированные соединительные точки между дистальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и внутренней рамкой первого шарнира Гука 321 расположены напротив фиксированных соединительных точек между проксимальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и элементом 14 для запястья. В качестве альтернативы фиксированные соединительные точки дистальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на змеевидном элементе 21 расположены напротив фиксированных соединительных точек проксимальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на соединительной пластине 3222. В то же время фиксированные соединительные точки между дистальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и внутренней рамкой первого шарнира Гука 321 расположены соответственно фиксированным соединительным точкам между проксимальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и элементом 14 для запястья. Благодаря соединению первой группы 61 передаточных проволок, второй группы 62 передаточных проволок, третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок в такой конфигурации, направление движения подъема и опускания, а также отклонения элемента 12 для манипулирования является таким же, что и направление движения подъема и опускания, а также отклонения концевого исполнительного элемента 23.
В одном варианте осуществления, как показано на фиг. 9, фиксированные соединительные точки между дистальными концами первой группы 61 передаточных проволок и второй группы 62 передаточных проволок и змеевидным элементом 21 расположены соответственно фиксированным соединительным точкам между проксимальными концами первой группы 61 передаточных проволок и второй группы 62 передаточных проволок и соединителем 322. Фиксированные соединительные точки между дистальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и первым шарниром Гука 321 расположены напротив фиксированных соединительных точек между проксимальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и элементом 14 для запястья.
Кроме того, как показано на фиг. 10, верхняя левая, верхняя правая, нижняя левая и нижняя правая области соединительной пластины 3222 снабжены соответственно четырьмя фиксированными точками на ее передней поверхности, а именно первой фиксированной точкой 322A, второй фиксированной точкой 322B, третьей фиксированной точкой 322C и четвертой фиксированной точкой 322D. Ориентации, обозначенные словосочетаниями «верхний левый», «верхний правый», «нижний левый» и «нижний правый», относятся к ориентациям, если смотреть на переднюю поверхность соединительной пластины (то есть на торцевую поверхность соединителя 322 напротив первого шарнира Гука 321, как показано на фиг. 9). Если смотреть в направлении от проксимального конца к дистальному концу, первая фиксированная точка 322A расположена в верхней левой области, вторая фиксированная точка 322B расположена в верхней правой области, третья фиксированная точка 322C расположена в нижней левой области, а четвертая фиксированная точка 322D расположена в нижней правой области. В первой фиксированной точке 322A (верхняя левая область) и четвертой фиксированной точке 322D (нижняя правая область) прочно закреплен проксимальный конец первой группы 61 передаточных проволок, тогда как во второй фиксированной точке 322B (верхняя правая область) и третьей фиксированной точке 322C (нижняя левая область) прочно закреплен проксимальный конец второй группы 62 передаточных проволок. Фиксированные соединительные точки дистальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на змеевидном элементе 21 расположены в зеркальной симметрии с фиксированными соединительными точками первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на соединительной пластине 3222. В частности, змеевидный элемент 21 также снабжен четырьмя фиксированными точками, которые соответственно расположены в верхней левой, верхней правой, нижней левой и нижней правой областях змеевидного элемента 21 (ориентация относится к ориентации, если смотреть на торцевую поверхность змеевидного элемента 21 напротив передней поверхности соединительной пластины). В качестве примера взято соединение первой группы 61 передаточных проволок; первая группа 61 передаточных проволок содержит верхнюю передаточную проволоку 61a и нижнюю передаточную проволоку 61b. Дистальный конец верхней передаточной проволоки 61a закреплен в верхней левой фиксированной точке змеевидного элемента 21 (ориентация относится к ориентации, если смотреть на торцевую поверхность змеевидного элемента 21 напротив передней поверхности соединительной пластины), тогда как проксимальный конец верхней передаточной проволоки 61a прочно закреплен в первой фиксированной точке 322A соединительной пластины 3222. Дистальный конец нижней передаточной проволоки 61b закреплен в нижней правой фиксированной точке змеевидного элемента 21 (ориентация относится к ориентации, если смотреть на торцевую поверхность змеевидного элемента 21 напротив передней поверхности соединительной пластины), тогда как проксимальный конец нижней передаточной проволоки 61b прочно закреплен в четвертой фиксированной точке 322D соединительной пластины 3222.
Соответственно, как показано на фиг. 11, внутренняя рамка 3212 первого шарнира Гука снабжена четырьмя соответствующими фиксированными точками, а именно пятой фиксированной точкой 321A, шестой фиксированной точкой 321B, седьмой фиксированной точкой 321C и восьмой фиксированной точкой 321D, которые соответственно расположены в верхней левой, верхней правой, нижней левой и нижней правой областях задней поверхности внутренней рамки 3212 первого шарнира Гука. Ориентации, обозначенные словосочетаниями «верхний левый», «верхний правый», «нижний левый» и «нижний правый», относятся к ориентациям, если смотреть на заднюю поверхность внутренней рамки первого шарнира Гука (то есть на торцевую поверхность первого шарнира Гука напротив приводного устройства, как показано на фиг. 11). Пятая фиксированная точка 321A и восьмая фиксированная точка 321D применяются для прочного закрепления дистального конца третьей группы 61’ передаточных проволок, а шестая фиксированная точка 321B и седьмая фиксированная точка 321C применяются для прочного закрепления дистального конца четвертой группы 62’ передаточных проволок.
Элемент 12 для манипулирования управляет элементом 14 для запястья для обеспечения движений подъема и опускания, а также отклонения, которые передаются первому шарниру Гука 321 посредством третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок, при этом первый шарнир Гука 321 и элемент 12 для манипулирования двигаются в одинаковом направлении. Поэтому фиксированные соединительные точки между дистальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и внутренней рамкой 3212 первого шарнира Гука выполнены расположенными напротив фиксированных соединительных точек между проксимальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и элементом 14 для запястья. В частности, элемент 14 для запястья снабжен четырьмя фиксированными соединительными точками, а именно первой фиксированной соединительной точкой 14A, второй фиксированной соединительной точкой (не пронумерована), третьей фиксированной соединительной точкой (не пронумерована), четвертой фиксированной соединительной точкой 14D, которые соответственно расположены в нижней левой, нижней правой, верхней левой, верхней правой областях задней поверхности элемента 14 для запястья (то есть на поверхности элемента 14 для запястья в направлении от элемента 12 для манипулирования). Ориентации, обозначенные словосочетаниями «верхний левый», «верхний правый», «нижний левый» и «нижний правый» относятся к ориентациям, если смотреть на заднюю поверхность элемента 14 для запястья (то есть ось элемента для запястья перпендикулярна соответствующей оси змеевидного элемента 21, как показано на фиг. 11).
В качестве примера взято соединение третьей группы 61’ передаточных проволок; третья группа 61’ передаточных проволок содержит первую передаточную проволоку 61a’ и вторую передаточную проволоку 61b’. Дистальный конец первой передаточной проволоки 61a’ закреплен в восьмой фиксированной точке 321D внутренней рамки 3212 первого шарнира Гука, а проксимальный конец первой передаточной проволоки 61a’ прочно закреплен в первой фиксированной соединительной точке 14A элемента 14 для запястья. Дистальный конец второй передаточной проволоки 61b’ закреплен в пятой фиксированной точке 321A внутренней рамки 3212 первого шарнира Гука, а проксимальный конец второй передаточной проволоки 61b’ прочно закреплен в четвертой фиксированной соединительной точке 14D элемента 14 для запястья.
Специалистам в данной области техники необходимо понимать, что фиксированные соединительные точки дистальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на змеевидном элементе 21 расположены в зеркальной симметрии с фиксированными соединительными точками проксимальных концов первой группы 61 передаточных проволок и второй группы 62 передаточных проволок на соединительной пластине 3222. В то же время фиксированные соединительные точки между дистальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и внутренней рамкой 3212 первого шарнира Гука расположены соответственно фиксированным соединительным точкам между проксимальными концами третьей группы 61’ передаточных проволок и четвертой группы 62’ передаточных проволок и элементом 14 для запястья. При таком устройстве элемент 14 для запястья и змеевидный элемент 21 также могут двигаться в одинаковом направлении.
Кроме того, как показано на фиг. 8–9, передаточный компонент 6 дополнительно содержит первый гибкий передаточный элемент 63 и второй гибкий передаточный элемент 64. Первый гибкий передаточный элемент 63 и второй гибкий передаточный элемент 64 расположены со стороны сменного компонента. Первый гибкий передаточный элемент 63 применяется для управления движением открывания и закрывания концевого исполнительного элемента 23. Второй гибкий передаточный элемент 64 применяется для управления вращением опорного гнезда 22 для инструмента.
В одном варианте осуществления компонент 13 управления открыванием и закрыванием управляет движением открывания и закрывания концевого исполнительного элемента 23 посредством первого гибкого передаточного элемента 63, а элемент 12 для манипулирования управляет вращением опорного гнезда 22 для инструмента посредством второго гибкого передаточного элемента 64. Кроме того, направление движения открывания и закрывания концевого исполнительного элемента 23 и направление вращения опорного гнезда 22 для инструмента заданы такими же, что и направление движения открывания и закрывания компонента 13 управления открыванием и закрыванием и направление вращения элемента 12 для манипулирования соответственно.
В одном конкретном варианте осуществления, как показано на фиг. 8, концевой исполнительный элемент дополнительно содержит первый реверсивный компонент. Первый гибкий передаточный элемент 63 может быть комбинацией из стальной проволоки 631 и упругого элемента 632. Стальная проволока 631 соединена с концевым исполнительным элементом 23 посредством первого реверсивного компонента. Упругий элемент 632 применяется для удерживания концевого исполнительного элемента 23 в нормально открытом состоянии. Например, когда упругий элемент 632 представляет собой пружину сжатия, пружина сжатия расположена между рабочими концами концевого исполнительного элемента 23 для удерживания концевого исполнительного элемента 23 в нормально открытом состоянии. В качестве другого примера, как показано на фиг. 8, проксимальный конец пружины сжатия упирается в опорное гнездо 22 для инструмента, а дистальный конец пружины сжатия соединен с первым реверсивным компонентом. Пружина сжатия сжимается, когда первый реверсивный компонент двигается в направлении проксимального конца. Первый реверсивный компонент применяется для обеспечения преобразования в отношении осевого движения стальной проволоки 631 и вращательного движения концевого исполнительного элемента 23. Например, поступательное движение стальной проволоки 631 в направлении проксимального конца преобразуется во вращательное движение рабочих концов посредством первого реверсивного компонента для управления закрыванием концевого исполнительного элемента 23. Кроме того, вращательное движение рабочих концов преобразуется в поступательное движение стальной проволоки 631 в направлении дистального конца посредством первого реверсивного компонента для управления возвратом в исходное положение стальной проволоки 631 или для обеспечения открывания концевого исполнительного элемента 23 и поступательного движения стальной проволоки 631 в направлении дистального конца посредством первого реверсивного компонента. Специалистам в данной области техники необходимо понимать, что упругий элемент 632 может также быть пружиной натяжения. Пружина натяжения может быть расположена между концевым исполнительным элементом 23 и опорным гнездом 22 для инструмента для удерживания концевого исполнительного элемента 23 в нормальном открытом состоянии. В качестве альтернативы упругий элемент 632 может также быть торсионной пружиной, расположенной на первом соединительном валу 3224 и/или первом упругом телескопическом опорном элементе 3214, для удерживания концевого исполнительного элемента 23 в нормально открытом состоянии. В качестве альтернативы упругий элемент 632 может также быть пружиной, расположенной между компонентом 13 управления открыванием и закрыванием и элементом 12 для манипулирования (например, пружиной сжатия, расположенной между элементом для открывания и закрывания и элементом 12 для манипулирования для удерживания элемента для открывания и закрывания в нормально открытом состоянии) для удерживания концевого исполнительного элемента 23 в нормально открытом состоянии. Второй гибкий передаточный элемент 64 представляет собой гибкий вал, дистальный конец которого прочно соединен с опорным гнездом 22 для инструмента, для управления концевым исполнительным элементом 23 с целью его вращения вокруг собственной оси.
Кроме того, как показано на фиг. 6 и 7, первый упругий телескопический опорный элемент 3214 и второй упругий телескопический опорный элемент 3215 расположены в центральном отверстии внутренней рамки 3212 первого шарнира Гука. Первый соединительный вал 3224 и второй соединительный вал 3225 соответственно расположены в центральном отверстии соединительной пластины 3222. Первый соединительный вал 3224 и второй соединительный вал 3225 соответственно обеспечены опорой посредством подшипников. Например, посредством подшипников первый соединительный вал 3224 и второй соединительный вал 3225 опираются на монтажную пластину, прикрепленную к корпусу сменного компонента 2. Проксимальный конец первого соединительного вала 3224 может быть с возможностью отсоединения соединен с дистальным концом первого упругого телескопического опорного элемента 3214, и проксимальный конец второго соединительного вала 3225 может быть с возможностью отсоединения соединен с дистальным концом второго упругого телескопического опорного элемента 3215, за счет чего осуществляется передача/прекращение передачи движущего усилия. Кроме того, как показано на фиг. 7, на торцевой поверхности проксимального конца каждого из первого соединительного вала 3224 и второго соединительного вала 3225 выполнено по два фиксирующих паза 3226. Соответственно, как показано на фиг. 6, на торцевой поверхности дистального конца каждого из первого упругого телескопического опорного элемента 3214 и второго упругого телескопического опорного элемента 3215 выполнено по два фиксирующих выступа 3216. Фиксирующий паз 3226 на соединительных валах и фиксирующий выступ 3216 на упругих телескопических опорных элементах выполнены соответствующими друг другу по форме и расположению. В то же время, как показано на фиг. 12, проксимальный конец стальной проволоки 631 первого гибкого передаточного элемента 63 намотан на дистальный конец первого соединительного вала 3224 и прочно соединен с дистальным концом первого соединительного вала 3224, а дистальный конец второго соединительного вала 3225 прочно соединен со вторым гибким передаточным элементом 64.
Конструкции первого упругого телескопического опорного элемента 3214 и второго упругого телескопического опорного элемента 3215 показаны на фиг. 13. Упругий телескопический опорный элемент представляет собой пустотелый элемент. Внутренний цилиндр 3217 соединен с выходным валом электродвигателя. Внешний цилиндр 3218 может двигаться в осевом направлении относительно внутреннего цилиндра 3217. Между внутренним цилиндром 3217 и внешним цилиндром 3218 расположена пружина 3219 сжатия, и на внутреннем цилиндре 3217 расположен ограничительный элемент для ограничения диапазона осевого движения внешнего цилиндра 3218 относительно внутреннего цилиндра 3217. Пружина 3219 сжатия выполнена с возможностью обеспечения движущего усилия для перемещения внешнего цилиндра 3218 в направлении от внутреннего цилиндра 3217.
Когда штифт 3213 первого шарнира Гука входит в зацепление в отверстии 3223 под штифт соединителя 322, первый упругий телескопический опорный элемент 3214 на стороне первого шарнира Гука 321 соединяется встык с первым соединительным валом 3224 на стороне соединителя 322, а второй упругий телескопический опорный элемент 3215 на стороне удерживаемого рукой конца 1 соединяется встык со вторым соединительным валом 3225 на стороне сменного компонента 2. В то же время фиксирующие выступы 3216 на торцевых поверхностях дистальных концов первого упругого телескопического опорного элемента 3214 и второго упругого телескопического опорного элемента 3215 входят в контакт с торцевыми поверхностями первого соединительного вала 3224 и второго соединительного вала 3225, и пружина 3219 сжатия на первом упругом телескопическом опорном элементе 3214 и втором упругом телескопическом опорном элементе 3215 соответственно деформируется. Затем во время совмещения приводное устройство 5 заставляет упругий телескопический опорный элемент вращаться относительно соединительного вала. Когда фиксирующие выступы 3216 на торцевых поверхностях дистальных концов первого упругого телескопического опорного элемента 3214 и второго упругого телескопического опорного элемента 3215 вращаются в положение, в котором они входят в зацепление в фиксирующих пазах 3226 на первом соединительном валу 3224 и втором соединительном валу 3225, под действием пружин 3219 сжатия в первом упругом телескопическом опорном элементе 3214 и втором упругом телескопическом опорном элементе 3215 фиксирующие выступы 3216 первого упругого телескопического опорного элемента 3214 и второго упругого телескопического опорного элемента 3215 перемещаются в осевом направлении и защелкиваются в фиксирующих пазах 3226 первого соединительного вала 3224 и второго соединительного вала 3225, так что соединительный вал может быть приведен во вращение, и таким образом завершается совмещение упругого телескопического опорного элемента и соединительного вала.
Как показано на фиг. 3, приводное устройство 5 расположено на дистальном конце удерживаемого рукой конца 1. В частности, как показано на фиг. 6 и 12, приводное устройство 5 содержит первый электродвигатель 51 и второй электродвигатель 52. Первый электродвигатель 51 управляет движением открывания и закрывания концевого исполнительного элемента 23 посредством первого гибкого передаточного элемента 63. Второй электродвигатель 52 управляет вращением опорного гнезда 23 для инструмента посредством второго гибкого передаточного элемента 64 и тем самым управляет вращением концевого исполнительного элемента 23. Как показано на фиг. 11, проксимальный конец первого упругого телескопического опорного элемента 3214 соединен с выходным валом первого электродвигателя 51, а проксимальный конец второго упругого телескопического опорного элемента 3215 соединен с выходным валом второго электродвигателя 52. Как показано на фиг. 12, стальная проволока 631 первого гибкого передаточного элемента 63 намотана и закреплена на первом соединительном валу 3224; второй гибкий передаточный элемент 64 прочно соединен со вторым соединительным валом 3225; и второй гибкий передаточный элемент 64 передает на опорное гнездо 22 для инструмента вращательный момент. Посредством указанной выше конструкции первый электродвигатель 51 может приводить первый гибкий передаточный элемент 63 в действие посредством первого упругого телескопического опорного элемента 3214 и первого соединительного вала 3224. Поступательное движение первого гибкого передаточного элемента 63 преобразуется в движение открывания и закрывания концевого исполнительного элемента 23 посредством первого реверсивного компонента. Второй электродвигатель 52 может приводить второй гибкий передаточный элемент 64 в действие посредством второго упругого телескопического опорного элемента 3215 и второго соединительного вала 3225 для управления вращением концевого исполнительного элемента 23.
Как показано на фиг. 3 и 4, сенсорное устройство содержит первый датчик 41 и второй датчик 42. Первый датчик 41 применяется для обнаружения движения открывания и закрывания компонента 13 управления открыванием и закрыванием. Второй датчик 42 применяется для обнаружения вращения элемента 12 для манипулирования.
В одном конкретном варианте осуществления компонент 13 управления открыванием и закрыванием содержит по меньшей мере один элемент для открывания и закрывания. Проксимальный конец элемента для открывания и закрывания с возможностью вращения соединен с элементом 12 для манипулирования посредством вращающегося вала, а дистальный конец элемента для открывания и закрывания удален от элемента 12 для манипулирования. Первый датчик 41 представляет собой датчик Холла и расположен на элементе для открывания и закрывания и элементе 12 для манипулирования, чтобы определять расстояние между элементом для открывания и закрывания компонента 13 управления открыванием и закрыванием и элементом 12 для манипулирования и тем самым обнаруживать вращательное движение элемента для открывания и закрывания относительно элемента 12 для манипулирования. В другом конкретном варианте осуществления первый датчик 41 может быть кодирующим диском вращающегося вала. Предусмотрен по меньшей мере один первый датчик 41, который расположен на вращающемся валу на проксимальном конце элемента для открывания и закрывания компонента 13 управления открыванием и закрыванием и применяется для обнаружения вращательного движения элемента для открывания и закрывания.
В одном конкретном варианте осуществления второй датчик 42 представляет собой кодирующий диск вращающегося вала. На задней поверхности внутренней рамки 141 элемента 14 для запястья расположена неподвижная опора. Второй датчик 42 расположен в центре неподвижной опоры для обнаружения вращения элемента 12 для манипулирования вокруг собственной оси.
Во время использования первый датчик 41 и второй датчик 42 соответственно обнаруживают сигнал движений открывания и закрывания компонента 13 управления открыванием и закрыванием удерживаемого рукой конца 1 и сигнал вращения элемента 12 для манипулирования и передают обнаруженные сигналы в контроллер (не показан). Контроллер анализирует обнаруженные сигналы и управляет движениями первого электродвигателя 51 и второго электродвигателя 52 соответственно, а затем движения передаются посредством первого гибкого передаточного элемента 63 и второго гибкого передаточного элемента 64, в результате чего осуществляется управление открыванием и закрыванием концевого исполнительного элемента и вращением опорного гнезда для инструмента. Кроме того, сигнал движения открывания и закрывания содержит информацию о направлении движения открывания и закрывания, а сигнал вращения содержит информацию о направлении вращения. Контроллер управляет направлениями движения первого электродвигателя 51 и второго электродвигателя 52 на основании указанных выше сигналов и посредством первого гибкого передаточного элемента 63 и второго гибкого передаточного элемента 64 для управления движением открывания и закрывания концевого исполнительного элемента 23 в одинаковом направлении и вращением опорного гнезда 22 для инструмента в одинаковом направлении.
В одном альтернативном варианте осуществления концевой исполнительный элемент дополнительно содержит второй реверсивный компонент и третий реверсивный компонент. Первый гибкий передаточный элемент 63 содержит гибкий вал. По сравнению со стальными проволоками гибкий вал может выполнять возвратно-поступательное движение за счет приложения усилия в любом направлении. В то же время первый соединительный вал 3224 соединен со вторым реверсивным компонентом. Проксимальный конец гибкого вала первого гибкого передаточного элемента может быть непосредственно закреплен на втором реверсивном компоненте, а дистальный конец гибкого вала первого гибкого передаточного элемента соединен с третьим реверсивным компонентом, чтобы приводить рабочий конец в движение открывания и закрывания. При таком устройстве можно преобразовывать вращательное движение первого соединительного вала 32241 в поступательное движение гибкого вала первого гибкого передаточного элемента 63, а затем в движение открывания и закрывания концевого исполнительного элемента 23 и таким образом управлять движением открывания и закрывания концевого исполнительного элемента 23. Третий реверсивный компонент представляет собой компонент, выполненный с возможностью преобразования поступательного движения гибкого вала в движение открывания и закрывания рабочего конца. Второй реверсивный компонент представляет собой компонент, выполненный с возможностью преобразования вращательного движения первого соединительного вала в поступательное движение гибкого вала. Например, реечно-шестеренчатая конструкция, конструкция, предусматривающая прямолинейный путь и вращающийся вал, и червячно-зубчатая конструкция.
Технические признаки в представленных выше вариантах осуществления при желании можно комбинировать. Для обеспечения краткости описания в рассмотренных выше вариантах осуществления описаны не все возможные комбинации технических признаков. Тем не менее, пока в комбинации этих технических признаков нет противоречия, все следует считать объемом, описанным в этом описании.
Рассмотренные выше варианты осуществления представлены только для описания нескольких вариантов осуществления настоящего изобретения, и хотя их описание является конкретным и подробным, но их не следует считать ограничивающими объем настоящего изобретения. Следует отметить, что специалистами в данной области техники без отступления от идеи настоящего изобретения могут быть предложены некоторые модификации и улучшения, все из которых попадают в объем защиты настоящего изобретения. Поэтому объем защиты настоящего изобретения должен определяться прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗМЕЕВИДНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ И НАБОР ДЕТАЛЕЙ ДЛЯ ЗМЕЕВИДНОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2019 |
|
RU2772213C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ПРЕЖДЕ ВСЕГО ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2011 |
|
RU2506903C2 |
| СИЛОВОЙ МОДУЛЬ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2674380C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, РАБОТАЮЩИЕ ОТ ОДНОГО ПОВОРАЧИВАЕМОГО ВЫХОДА | 2014 |
|
RU2650585C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ | 2014 |
|
RU2677531C2 |
| РАЗЪЕМНАЯ КОНСТРУКЦИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2665132C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2653625C2 |
| МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, ПРИВОДИМЫЕ В ДЕЙСТВИЕ ДВИГАТЕЛЕМ, С КОНСТРУКЦИЯМИ ИНДИКАЦИИ СТАТУСА | 2014 |
|
RU2651066C2 |
Настоящее изобретение относится к области медицинских устройств и, в частности, к змеевидному хирургическому инструменту. Змеевидный хирургический инструмент содержит удерживаемый рукой конец, сменный компонент, быстросъемный соединительный элемент и передаточный компонент. Удерживаемый рукой конец содержит элемент для удерживания, элемент для запястья и элемент для манипулирования. Элемент для манипулирования соединен с элементом для удерживания посредством элемента для запястья и элемент для запястья имеет по меньшей мере первую вращательную степень свободы. Сменный компонент содержит змеевидный элемент, опорное гнездо для инструмента и концевой исполнительный элемент, которые соединены последовательно. Змеевидный элемент имеет пятую вращательную степень свободы. Быстросъемный соединительный элемент содержит элемент обеспечения разъемного соединения. Элемент обеспечения разъемного соединения содержит первый шарнир Гука, выполненный на элементе для удерживания, и соединитель, выполненный на сменном компоненте. Первый шарнир Гука с возможностью отсоединения соединен с соединителем. Передаточный компонент содержит первую часть и вторую часть, которые расположены соответственно на сменном компоненте и удерживаемом рукой конце. Первая часть соединяет соединитель со змеевидным элементом. Вторая часть соединяет элемент для запястья с первым шарниром Гука. Первая часть выполнена с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения согласно девятому вращательному движению первого шарнира Гука, а вторая часть выполнена с возможностью обеспечения выполнения первым шарниром Гука девятого вращательного движения согласно первому вращательному движению элемента для запястья. Использование изобретения позволяет обеспечить меньший разрез для лучшего терапевтического эффекта и снизить уровень повреждения других тканей во время операции. 23 з.п. ф-лы, 13 ил.
1. Змеевидный хирургический инструмент, содержащий:
удерживаемый рукой конец, содержащий элемент для удерживания, элемент для запястья и элемент для манипулирования, при этом элемент для манипулирования соединен с элементом для удерживания посредством элемента для запястья и элемент для запястья имеет по меньшей мере первую вращательную степень свободы;
сменный компонент, содержащий змеевидный элемент, опорное гнездо для инструмента и концевой исполнительный элемент, которые соединены последовательно, при этом змеевидный элемент имеет пятую вращательную степень свободы;
быстросъемный соединительный элемент, содержащий элемент обеспечения разъемного соединения, при этом элемент обеспечения разъемного соединения содержит первый шарнир Гука, выполненный на элементе для удерживания, и соединитель, выполненный на сменном компоненте; первый шарнир Гука с возможностью отсоединения соединен с соединителем; и
передаточный компонент, содержащий первую часть и вторую часть, которые расположены соответственно на сменном компоненте и удерживаемом рукой конце, при этом первая часть соединяет соединитель со змеевидным элементом; вторая часть соединяет элемент для запястья с первым шарниром Гука; первая часть выполнена с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения согласно девятому вращательному движению первого шарнира Гука, а вторая часть выполнена с возможностью обеспечения выполнения первым шарниром Гука девятого вращательного движения согласно первому вращательному движению элемента для запястья.
2. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что элемент для запястья дополнительно имеет вторую вращательную степень свободы;
вторая часть дополнительно выполнена с возможностью обеспечения выполнения первым шарниром Гука десятого вращательного движения согласно второму вращательному движению элемента для запястья;
змеевидный элемент имеет шестую вращательную степень свободы; и
первая часть дополнительно выполнена с возможностью обеспечения выполнения змеевидным элементом шестого вращательного движения согласно десятому вращательному движению первого шарнира Гука.
3. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что
первый шарнир Гука выполняет девятое вращательное движение относительно девятой оси, а змеевидный элемент выполняет пятое вращательное движение относительно пятой оси; и
девятая ось параллельна пятой оси.
4. Змеевидный хирургический инструмент по п. 2, отличающийся тем, что
первый шарнир Гука выполняет девятое вращательное движение относительно девятой оси, а змеевидный элемент выполняет пятое вращательное движение относительно пятой оси; и
первый шарнир Гука выполняет десятое вращательное движение относительно десятой оси, а змеевидный элемент выполняет шестое вращательное движение относительно шестой оси; и
девятая ось параллельна пятой оси, а десятая ось параллельна шестой оси.
5. Змеевидный хирургический инструмент по п. 4, отличающийся тем, что
элемент для запястья выполняет первое вращательное движение относительно первой оси и второе вращательное движение относительно второй оси; и
первая ось параллельна пятой оси, а вторая ось параллельна шестой оси.
6. Змеевидный хирургический инструмент по п. 4, отличающийся тем, что первый шарнир Гука содержит внутреннюю рамку и внешнюю рамку; внешняя рамка выполнена с возможностью вращения относительно элемента для удерживания вокруг десятой оси, а внутренняя рамка выполнена с возможностью вращения относительно внешней рамки вокруг девятой оси.
7. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что сменный компонент содержит корпус и пространство, определенное корпусом; соединитель расположен в пространстве и содержит соединительную пластину, которая с возможностью движения расположена относительно корпуса сменного компонента и с возможностью отсоединения соединена с первым шарниром Гука.
8. Змеевидный хирургический инструмент по п. 7, отличающийся тем, что соединитель дополнительно содержит упругий соединительный компонент, посредством которого соединительная пластина прикреплена к корпусу сменного компонента.
9. Змеевидный хирургический инструмент по п. 7, отличающийся тем, что на внутренней рамке первого шарнира Гука предусмотрен по меньшей мере один штифт, при этом штифт содержит основную часть штифта и выступающий элемент, выполненный в осевом направлении основной части штифта; внешний диаметр выступающего элемента больше, чем у основной части штифта; соединитель содержит соединительную пластину, с возможностью вращения соединенную со сменным компонентом; в месте на соединительной пластине, соответствующем штифту, выполнено отверстие под штифт, при этом отверстие под штифт содержит часть с большим диаметром и часть с малым диаметром, которые расположены рядом друг с другом и накладываются друг на друга, при этом размер части с большим диаметром выбран соответствующим внешнему диаметру выступающего элемента; часть с малым диаметром имеет по меньшей мере часть, которая выполнена соответствующей внешнему диаметру основной части штифта; и размер места накладывания части с большим диаметром на часть с малым диаметром выбран таким, который позволяет проходить основной части штифта.
10. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что первая часть передаточного компонента содержит первую группу передаточных проволок и вторую группу передаточных проволок, а вторая часть передаточного компонента содержит третью группу передаточных проволок и четвертую группу передаточных проволок, при этом проксимальные концы третьей группы передаточных проволок и четвертой группы передаточных проволок соединены с элементом для запястья, а дистальные концы третьей группы передаточных проволок и четвертой группы передаточных проволок соединены с первым шарниром Гука; проксимальные концы первой группы передаточных проволок и второй группы передаточных проволок соединены с соединительной пластиной, а дистальные концы первой группы передаточных проволок и второй группы передаточных проволок соединены со змеевидным элементом; посредством первой группы передаточных проволок и второй группы передаточных проволок змеевидный элемент управляется для выполнения им пятого вращательного движения согласно девятому вращательному движению первого шарнира Гука и управляет змеевидным элементом для выполнения им шестого вращательного движения согласно десятому вращательному движению первого шарнира Гука; посредством третьей группы передаточных проволок и четвертой группы передаточных проволок змеевидный элемент управляется для выполнения им девятого вращательного движения согласно первому вращательному движению элемента для запястья и управляет первым шарниром Гука для выполнения им второго вращательного движения согласно десятому вращательному движению элемента для запястья.
11. Змеевидный хирургический инструмент по п. 10, отличающийся тем, что фиксированные соединительные точки дистальных концов первой группы передаточных проволок и второй группы передаточных проволок на змеевидном элементе расположены соответственно фиксированным соединительным точкам проксимальных концов первой группы передаточных проволок и второй группы передаточных проволок на соединительной пластине; и фиксированные соединительные точки между дистальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и внутренней рамкой первого шарнира Гука расположены напротив фиксированных соединительных точек между проксимальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и элементом для запястья; или
фиксированные соединительные точки дистальных концов первой группы передаточных проволок и второй группы передаточных проволок на змеевидном элементе расположены напротив фиксированных соединительных точек проксимальных концов первой группы передаточных проволок и второй группы передаточных проволок на соединительной пластине; и фиксированные соединительные точки между дистальными концами третьей и четвертой групп передаточных проволок и внутренней рамкой первого шарнира Гука расположены соответственно фиксированным соединительным точкам между проксимальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и элементом для запястья.
12. Змеевидный хирургический инструмент по п. 10, отличающийся тем, что
фиксированные соединительные точки дистальных концов первой группы передаточных проволок и второй группы передаточных проволок на змеевидном элементе последовательно соединены с образованием первого прямоугольника, при этом одна сторона первого прямоугольника параллельна пятой оси, а другая сторона первого прямоугольника параллельна шестой оси;
фиксированные соединительные точки проксимальных концов первой группы передаточных проволок и второй группы передаточных проволок на соединительной пластине последовательно соединены с образованием второго прямоугольника, при этом одна сторона второго прямоугольника параллельна пятой оси, а другая сторона второго прямоугольника параллельна шестой оси;
фиксированные соединительные точки между дистальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и внутренней рамкой первого шарнира Гука последовательно соединены с образованием третьего прямоугольника, при этом одна сторона третьего прямоугольника параллельна девятой оси, а другая сторона третьего прямоугольника параллельна десятой оси; и
фиксированные соединительные точки между проксимальными концами третьей группы передаточных проволок и четвертой группы передаточных проволок и элементом для запястья последовательно соединены с образованием четвертого прямоугольника, при этом одна сторона четвертого прямоугольника параллельна первой оси, а другая сторона четвертого прямоугольника параллельна второй оси.
13. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что концевой исполнительный элемент содержит по меньшей мере один рабочий конец, который с возможностью вращения соединен с опорным гнездом для инструмента, и удерживаемый рукой конец дополнительно содержит компонент управления открыванием и закрыванием, который выполнен с возможностью движения относительно элемента для манипулирования; передаточный компонент дополнительно содержит первый гибкий элемент; и компонент управления открыванием и закрыванием управляет вращением рабочего конца посредством первого гибкого элемента.
14. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что быстросъемный соединительный элемент дополнительно содержит первый соединительный вал и первый упругий телескопический опорный элемент, с возможностью отсоединения соединенный с первым соединительным валом, при этом первый соединительный вал проходит в направлении проксимального конца и через соединитель; первый упругий телескопический опорный элемент проходит в направлении дистального конца и через первый шарнир Гука; элемент для удерживания дополнительно снабжен первым электродвигателем, первым датчиком и контроллером; первый датчик выполнен с возможностью обнаружения движения открывания и закрывания компонента управления открыванием и закрыванием; контроллер управляет первым электродвигателем для выработки мощности согласно сигналу, обнаруженному первым датчиком, и первый электродвигатель приводит первый гибкий элемент в действие посредством первого упругого телескопического опорного элемента и первого соединительного вала.
15. Змеевидный хирургический инструмент по п. 14, отличающийся тем, что торцевая поверхность первого упругого телескопического опорного элемента снабжена фиксирующим выступом; торцевая поверхность первого соединительного вала снабжена фиксирующим пазом, с которым фиксирующий выступ выполнен с возможностью входа в зацепление, и за счет взаимодействия фиксирующего выступа с фиксирующим пазом обеспечено разъемное соединение первого упругого телескопического опорного элемента с первым соединительным валом.
16. Змеевидный хирургический инструмент по п. 14, отличающийся тем, что первый упругий телескопический опорный элемент содержит пружину сжатия, внутренний цилиндр и внешний цилиндр, расположенный вокруг внутреннего цилиндра, при этом внутренний цилиндр соединен с выходным валом первого электродвигателя; внешний цилиндр выполнен с возможностью движения в осевом направлении относительно внутреннего цилиндра; и пружина сжатия выполнена с возможностью обеспечения движущего усилия, обеспечивающего движение внешнего цилиндра в направлении от внутреннего цилиндра.
17. Змеевидный хирургический инструмент по п. 13, отличающийся тем, что концевой исполнительный элемент дополнительно содержит первый реверсивный компонент; первый гибкий элемент содержит стальную проволоку и упругий элемент, который выполнен с возможностью обеспечения движущего усилия, которое удерживает рабочий конец в нормально открытом состоянии; проксимальный конец стальной проволоки намотан на первом соединительном валу; дистальный конец стальной проволоки соединен с первым реверсивным компонентом; и первый реверсивный компонент предназначен для обеспечения преобразования в отношении поступательного движения стальной проволоки и движения открывания и закрывания рабочего конца.
18. Змеевидный хирургический инструмент по п. 13, отличающийся тем, что концевой исполнительный элемент дополнительно содержит второй реверсивный компонент и третий реверсивный компонент; первый гибкий элемент содержит гибкий вал; первый соединительный вал соединен со вторым реверсивным компонентом; проксимальный конец гибкого вала закреплен на втором реверсивном компоненте; дистальный конец гибкого вала соединен с третьим реверсивным компонентом для приведения рабочего конца в действие с обеспечением движения открывания и закрывания; третий реверсивный компонент выполнен с возможностью преобразования поступательного движения гибкого вала в движение открывания и закрывания рабочего конца; и второй реверсивный компонент выполнен с возможностью преобразования вращательного движения первого соединительного вала в поступательное движение гибкого вала.
19. Змеевидный хирургический инструмент по п. 14, отличающийся тем, что компонент управления открыванием и закрыванием содержит по меньшей мере один элемент для открывания и закрывания, который с возможностью вращения соединен с элементом для манипулирования, при этом первый датчик представляет собой датчик Холла, расположенный на элементе для открывания и закрывания или элементе для манипулирования, или первый датчик представляет собой кодирующий диск вращающегося вала, расположенный на вращающемся валу элемента для открывания и закрывания.
20. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что элемент для манипулирования выполнен с возможностью вращения вокруг собственной оси относительно элемента для запястья; опорное гнездо для инструмента выполнено с возможностью вращения вокруг собственной оси относительно змеевидного элемента; и передаточный компонент дополнительно содержит второй гибкий передаточный элемент для передачи вращения элемента для манипулирования на опорное гнездо для инструмента с обеспечением вращения опорного гнезда для инструмента вокруг собственной оси.
21. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что быстросъемный соединительный элемент дополнительно содержит второй соединительный вал и второй упругий телескопический опорный элемент, с возможностью отсоединения соединенный со вторым соединительным валом; второй соединительный вал проходит в направлении дистального конца и через первый шарнир Гука; второй упругий телескопический опорный элемент проходит в направлении проксимального конца и через соединитель; элемент для удерживания дополнительно снабжен вторым электродвигателем, вторым датчиком и контроллером; второй датчик выполнен с возможностью обнаружения вращения элемента для манипулирования; контроллер управляет вторым электродвигателем для выработки мощности согласно сигналу, обнаруженному вторым датчиком; и второй электродвигатель приводит второй гибкий элемент в действие посредством второго упругого телескопического опорного элемента и второго соединительного вала.
22. Змеевидный хирургический инструмент по п. 21, отличающийся тем, что второй гибкий элемент представляет собой гибкий вал, и два конца гибкого вала соответственно прочно соединены со вторым соединительным валом и опорным гнездом для инструмента.
23. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что элемент для запястья снабжен неподвижной опорой, и второй датчик представляет собой кодирующий диск вращающегося вала, расположенный на неподвижной опоре.
24. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что быстросъемный соединительный элемент дополнительно содержит элемент для фиксации защелкиванием, выполненный с возможностью ограничения вращения первого шарнира Гука и соединителя в окружном направлении сменного компонента.
| WO 2018044306 A1, 08.03.2018 | |||
| CN 105592801 A, 18.05.2016 | |||
| EP 2362283 A2, 31.08.2011 | |||
| US 5402801, 04.04.1995. |

