ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[1] Эта заявка испрашивает приоритет заявки на патент Китая № 201810971612.3 под названием «змеевидный хирургический инструмент», поданной 24 августа 2018 г., содержание которой посредством ссылки включено в этот документ во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
[2] Настоящее изобретение относится к области медицинских устройств и, в частности, к змеевидному хирургическому инструменту и набору деталей для него.
УРОВЕНЬ ТЕХНИКИ
[3] В малоинвазивной операции часто применяются хирургические инструменты со змеевидными сочленениями и эндоскопы со змеевидными сочленениями, чтобы можно было обходить другие органы во время хирургической операции, что может обеспечить меньший разрез для лучшего терапевтического эффекта, и снизить уровень повреждения других тканей во время операции. Тем не менее направление движения терминального конца существующего змеевидного хирургического инструмента, известного автору настоящего изобретения, является противоположным направлению работы рабочим концом, что увеличивает сложность операции для врачей и хирургические риски.
[4] Хирурги управляют удерживаемым рукой концом змеевидного хирургического инструмента для осуществления хирургической операции в стерильной среде. Чтобы поддерживать стерильное состояние в операционной зоне рядом с пациентом, необходимо после операции полностью очищать и дезинфицировать многоразовый змеевидный хирургический инструмент. Однако внутренние компоненты, такие как приводные устройства, сенсорные устройства, электрические соединительные элементы и т.п., хирургических инструментов с электрическим приводом не могут в целом быть простерилизованы традиционными способами. Например, способы стерилизации паром, теплом, давлением или химическими веществами и т.п. могут вызвать повреждение внутренних компонентов.
[5] Кроме того, во время операции необходимо подготавливать несколько змеевидных хирургических инструментов с одинаковыми или разными концевыми исполнительными элементами, что приводит к напрасному расходованию ресурсов и увеличивает нагрузку на пациента. Более того, большинство сменных змеевидных хирургических инструментов, известных автору настоящего изобретения, являются сложными в конструкции и дорогостоящими.
КРАТКОЕ ОПИСАНИЕ
[6] В различных приведенных в качестве примера вариантах осуществления, раскрытых в этом описании, предложен змеевидный хирургический инструмент.
[7] Один аспект настоящего изобретения предусматривает змеевидный хирургический инструмент, содержащий:
[8] удерживаемый рукой конец, содержащий удерживающую конструкцию, имеющую проксимальное посадочное место и дистальное посадочное место, элемент для запястья, и элемент для манипулирования, соединенный с проксимальным посадочным местом удерживающей конструкции посредством элемента для запястья, и при этом элемент для манипулирования соединен с возможностью отсоединения с элементом для запястья; и
[9] сменный инструмент, соединенный с возможностью отсоединения с дистальным посадочным местом, при этом элемент для запястья расположен на дистальной поверхности проксимального посадочного места, и элемент для запястья соединен с возможностью отсоединения с элементом для манипулирования посредством устройства сопряжения, и при этом устройство сопряжения содержит соединительный штифт, расположенный на проксимальном конце элемента для манипулирования, и полый соединительный вал, расположенный на элементе для запястья и соединенный с возможностью отсоединения с соединительным штифтом.
[10] В вышеупомянутом змеевидном хирургическом инструменте удерживаемый рукой конец соединен с возможностью отсоединения со сменным инструментом, тем самым реализуя быструю замену, что является простым с точки зрения конструкции и удобным для стерилизации.
[11] В одном варианте осуществления змеевидный хирургический инструмент дополнительно содержит стерильный пакет для обертывания с возможностью снятия наружной поверхности удерживающей конструкции. Стерильный пакет имеет кольцевой рукав конца для запястья, основную часть стерильного пакета и кольцевой рукав конца для инструмента, которые соединены последовательно и находятся в сообщении друг с другом. Кольцевой рукав конца для запястья стерильного пакета используется для герметизации соединения между элементом для манипулирования и элементом для запястья, и кольцевой рукав конца для инструмента используется для герметизации соединения между сменным инструментом и удерживаемым рукой концом.
[12] В одном варианте осуществления устройство сопряжения дополнительно содержит осевой ограничивающий элемент, выполненный с возможностью ограничения осевого движения соединительного штифта, и окружной ограничивающий элемент, выполненный с возможностью ограничения вращения по окружности соединительного штифта.
[13] В одном варианте осуществления окружной ограничивающий элемент содержит соединительный элемент, расположенный на поверхности соединительного штифта и расположенный вдоль осевого направления соединительного штифта, и первый фиксирующий паз, расположенный на внутренней стенке полого соединительного вала и проходящий вдоль осевого направления полого соединительного вала. Первый фиксирующий паз выполнен с возможностью взаимодействия с соединительным элементом для ограничения вращения по окружности соединительного штифта в направлении по окружности. Осевой ограничивающий элемент содержит второй фиксирующий паз, расположенный на поверхности соединительного штифта и расположенный вдоль направления по окружности, и упругое фиксирующее устройство, расположенное на внутренней стенке полого соединительного вала. Упругое фиксирующее устройство взаимодействует со вторым фиксирующим пазом для ограничения осевого движения соединительного штифта.
[14] В одном варианте осуществления упругое фиксирующее устройство содержит по меньшей мере один упругий выступ.
[15] В одном варианте осуществления элемент для манипулирования и соединительный штифт соединены друг с другом посредством подшипника для достижения вращательного движения элемента для манипулирования относительно элемента для запястья.
[16] В одном варианте осуществления проксимальный конец элемента для манипулирования содержит опору для подшипника, и внешнее кольцо подшипника неподвижно присоединено к опоре для подшипника. Дистальный конец соединительного штифта содержит первый уступ, неподвижно присоединенный к внутреннему кольцу подшипника в радиальном направлении.
[17] В одном варианте осуществления соединительный штифт дополнительно содержит второй уступ, расположенный на дистальном конце первого уступа, и при этом второй уступ проходит через опору для подшипника. Паз для вмещения пружинного кольца расположен на дистальной поверхности второго уступа смежно с посадочным местом подшипника.
[18] В одном варианте осуществления сменный инструмент содержит змеевидный элемент, опорное гнездо для инструмента и концевой исполнительный элемент, которые последовательно соединены. Змеевидный хирургический инструмент дополнительно содержит узел крепления, при этом сменный инструмент соединен с возможностью отсоединения с удерживаемым рукой концом посредством узла крепления, и передаточное устройство.
[19] Элемент для запястья по меньшей мере имеет первую вращательную степень свободы таким, что элемент для запястья способен выполнять первое вращательное движение. Змеевидный элемент по меньшей мере имеет пятую вращательную степень свободы, так что змеевидный элемент способен выполнять пятое вращательное движение. Передаточное устройство выполнено с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения вместе с первым вращательным движением элемента для запястья.
[20] В одном варианте осуществления элемент для запястья дополнительно имеет вторую вращательную степень свободы, так что элемент для запястья может выполнять второе вращательное движение. Змеевидный элемент по меньшей мере имеет шестую вращательную степень свободы, так что змеевидный элемент может выполнять шестое вращательное движение. Передаточное устройство выполнено с возможностью обеспечения выполнения змеевидным элементом шестого вращательного движения вместе со вторым вращательным движением элемента для запястья.
[21] В одном варианте осуществления узел крепления содержит элемент обеспечения разъемного соединения, при этом элемент обеспечения разъемного соединения содержит: первый компонент, расположенный на удерживающей конструкции; и второй компонент, расположенный на сменном инструменте. Первый компонент и второй компонент соединены с возможностью отсоединения и могут синхронно двигаться.
[22] В одном варианте осуществления передаточное устройство содержит: первую часть, расположенную на удерживаемом рукой конце; и вторую часть, расположенную на сменном инструменте.
[23] Проксимальный конец первой части соединен со змеевидным элементом, и дистальный конец первой части соединен с первым компонентом. Первая часть выполнена с возможностью обеспечения движения первого компонента вместе с движением змеевидного элемента. Проксимальный конец второй части соединен со вторым компонентом, и дистальный конец второй части соединен со змеевидным элементом. Вторая часть выполнена с возможностью обеспечения движения змеевидного элемента вместе с движением второго компонента.
[24] В одном варианте осуществления змеевидный хирургический инструмент дополнительно содержит приводное устройство, сенсорное устройство и контроллер, расположенный на удерживающей конструкции.
[25] Сенсорное устройство соединено с возможностью осуществления связи с контроллером и выполнено с возможностью обнаружения движения элемента для запястья с получением сигнала движения; контроллер управляет приводным устройством для обеспечения движения первого компонента согласно сигналу движения, обнаруженному сенсорным устройством; и передаточное устройство, расположенное в сменном инструменте, выполнено с возможностью соединения второго компонента и змеевидного элемента, чтобы змеевидный элемент был способен двигаться вместе с движением второго компонента.
[26] В одном варианте осуществления элемент для запястья дополнительно имеет вторую вращательную степень свободы, так что элемент для запястья может выполнять второе вращательное движение. Змеевидный элемент по меньшей мере имеет шестую вращательную степень свободы, так что змеевидный элемент способен выполнять шестое вращательное движение. Первый компонент представляет собой шарнир Гука, расположенный на дистальном посадочном месте удерживающей конструкции, и шарнир Гука имеет девятую степень свободы и десятую степень свободы, так что шарнир Гука способен выполнять девятое вращательное движение и десятое вращательное движение. Сенсорное устройство обнаруживает первое вращательное движение и/или второе вращательное движение элемента для запястья с получением сигнала перемещения и передает сигнал движения на контроллер. Контроллер управляет приводным устройством для обеспечения выполнения шарниром Гука девятого вращательного движения и/или десятого вращательного движения согласно сигналу движения, переданному сенсорным устройством. Второй компонент представляет собой соединитель, расположенный на сменном инструменте, и шарнир Гука соединен с возможностью отсоединения с соединителем. Передаточное устройство соединено со змеевидным элементом и соединителем и выполнено с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения вместе с девятым вращательным движением шарнира Гука и дополнительно выполнено с возможностью обеспечения выполнения змеевидным элементом шестого вращательного движения вместе с десятым вращательным движением шарнира Гука.
[27] В одном варианте осуществления передаточное устройство содержит первую группу передаточных проволок и вторую группу передаточных проволок, расположенную на сменном инструменте, и устройство привода содержит первый электродвигатель и второй электродвигатель. Первый электродвигатель выполнен с возможностью обеспечения движения первой группы передаточных проволок, и второй электродвигатель выполнен с возможностью обеспечения движения второй группы передаточных проволок, так что змеевидный элемент движется вместе с движением шарнира Гука.
[28] В одном варианте осуществления узел крепления дополнительно содержит элемент для фиксации защелкиванием, выполненный с возможностью ограничения вращения шарнира Гука и соединителя в направлении по окружности сменного инструмента и/или ограничения движения шарнира Гука и соединителя вдоль осевого направления сменного инструмента.
[29] В одном варианте осуществления концевой исполнительный элемент содержит по меньшей мере один рабочий конец, при этом рабочий конец с возможностью вращения соединен с опорным гнездом для инструмента; и удерживаемый рукой конец дополнительно содержит устройство управления открыванием и закрыванием, которое выполнено с возможностью снятия относительно элемента для манипулирования; передаточное устройство дополнительно содержит первый гибкий передаточный элемент; и устройство управления открыванием и закрыванием управляет вращением рабочего конца посредством первого гибкого передаточного элемента.
[30] В одном варианте осуществления узел крепления дополнительно содержит первый соединительный вал, и первый упругий телескопический штифт соединен с возможностью отсоединения с первым соединительным валом. Первый соединительный вал проходит в направлении проксимального конца и через второй компонент, а первый упругий телескопический штифт проходит в направлении дистального конца и через первый компонент. Приводное устройство дополнительно содержит третий электродвигатель, и сенсорное устройство дополнительно содержит третий датчик, при этом третий датчик выполнен с возможностью обнаружения движения открывания и закрывания устройства управления открыванием и закрыванием с получением сигнала движения открывания и закрывания. Контроллер выполнен с возможностью управления выходной мощностью третьего электродвигателя согласно сигналу движения открывания и закрывания, обнаруженному третьим датчиком. Третий электродвигатель выполнен с возможностью приведения в действие первого гибкого передаточного элемента посредством первого упругого телескопического штифта и первого соединительного вала.
[31] В одном варианте осуществления элемент для манипулирования выполнен с возможностью вращения вокруг своей оси относительно элемента для запястья, опорное гнездо для инструмента выполнено с возможностью вращения вокруг своей оси относительно змеевидных сочленений, и передаточное устройство дополнительно содержит второй гибкий передаточный элемент, выполненный с возможностью передачи вращательного движения элемента для манипулирования на опорное гнездо для инструмента для вращения опорного гнезда для инструмента.
[32] В одном варианте осуществления узел крепления дополнительно содержит второй соединительный вал, и второй упругий телескопический штифт соединен с возможностью отсоединения со вторым соединительным валом. Второй соединительный вал проходит в направлении дистального конца и через второй компонент, а второй упругий телескопический штифт проходит в направлении проксимального конца и через первый компонент. Приводное устройство дополнительно содержит четвертый электродвигатель, и сенсорное устройство дополнительно содержит четвертый датчик. Четвертый датчик выполнен с возможностью обнаружения вращательного движения элемента для манипулирования с получением сигнала вращательного движения. Контроллер управляет выходной мощностью четвертого электродвигателя согласно сигналу вращательного движения, обнаруженному четвертым датчиком, и четвертый электродвигатель выполнен с возможностью приведения в действие второго гибкого передаточного элемента посредством второго упругого телескопического штифта и второго соединительного вала.
[33] В одном варианте осуществления кольцевой рукав конца для запястья плотно прилегает к наружной части соединения между элементом для манипулирования и элементом для запястья посредством упругой восстанавливающей силы. Кольцевой рукав конца для инструмента плотно прилегает к наружной части соединения между сменным инструментом и удерживаемым рукой концом посредством упругой восстанавливающей силы.
[34] В одном варианте осуществления основная часть стерильного пакета присоединена при помощи клея к кольцевому рукаву конца для запястья, и основная часть стерильного пакета присоединена при помощи клея к кольцевому рукаву конца для инструмента.
[35] Другой аспект настоящего изобретения также предусматривает набор деталей для змеевидного хирургического инструмента, содержащий змеевидный хирургический инструмент. Змеевидный хирургический инструмент содержит:
[36] удерживаемый рукой конец, содержащий удерживающую конструкцию, элемент для запястья и элемент для манипулирования, при этом удерживающая конструкция имеет проксимальное посадочное место и дистальное посадочное место, и элемент для манипулирования соединен с проксимальным посадочным местом удерживающей конструкции посредством элемента для запястья;
[37] сменный инструмент, соединенный с возможностью отсоединения с дистальным посадочным местом; и
[38] стерильный пакет, имеющий кольцевой рукав конца для запястья, основную часть стерильного пакета и кольцевой рукав конца для инструмента, которые соединены последовательно и находятся в сообщении друг с другом, при этом стерильный пакет обернут с возможностью снятия на наружную поверхность удерживающей конструкции, и кольцевой рукав конца для запястья стерильного пакета выполнен с возможностью герметизации соединения между элементом для манипулирования и элементом для запястья, и кольцевой рукав конца для инструмента выполнен с возможностью герметизации соединения между сменным инструментом и удерживаемым рукой концом, при этом элемент для запястья расположен на дистальной поверхности проксимального посадочного места, и элемент для запястья соединен с возможностью отсоединения с элементом для манипулирования посредством устройства сопряжения, и при этом устройство сопряжения содержит соединительный штифт, расположенный на проксимальном конце элемента для манипулирования, и полый соединительный вал, расположенный на элементе для запястья и соединенный с возможностью отсоединения с соединительным штифтом.
[39] В вышеуказанном змеевидном хирургическом инструменте посредством стерильного пакета, обернутого на удерживающую конструкцию, можно достичь герметизации соединения между элементом для запястья и элементом для манипулирования и герметизации соединения между сменным инструментом и удерживаемым рукой концом, чтобы во время операции удерживаемый рукой конец был способен находиться в стерильном состоянии, избегая послеоперационной дезинфекции и стерилизации, тем самым избегая повреждения внутренних компонентов в удерживаемом рукой конце.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
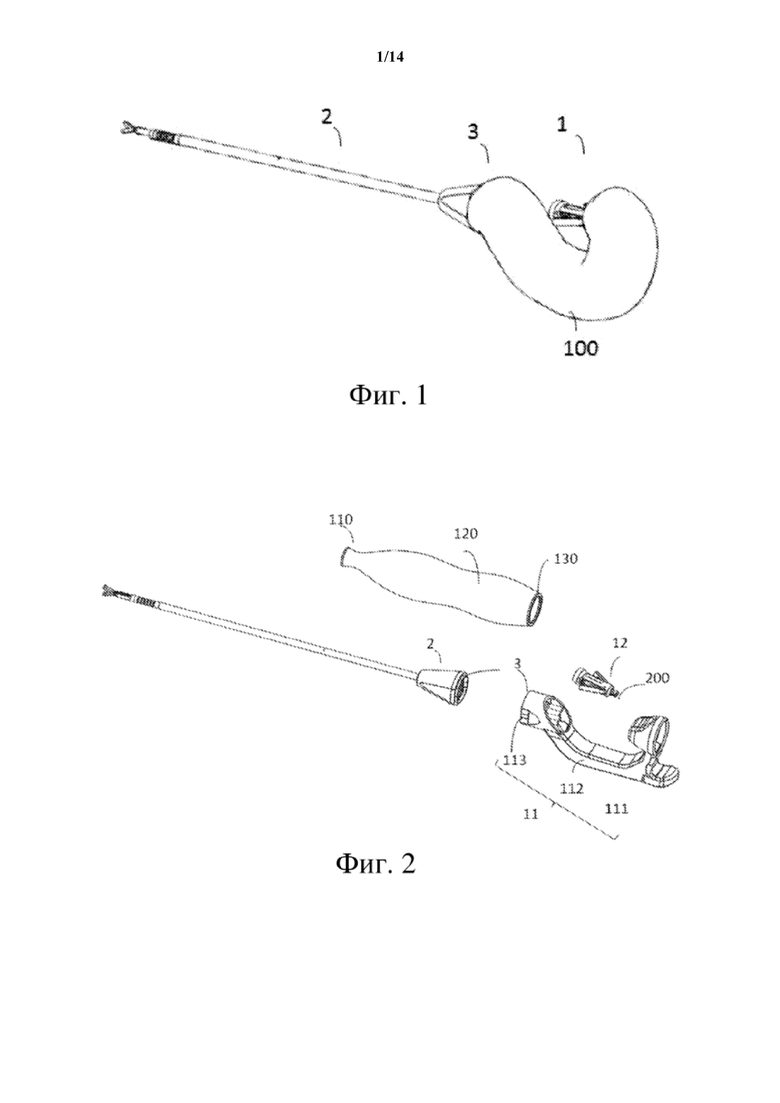
[40] На фиг. 1 показано схематическое изображение змеевидного хирургического инструмента согласно варианту осуществления настоящего изобретения;
[41] на фиг. 2 показано схематическое изображение в разобранном виде стерильного пакета змеевидного хирургического инструмента, показанного на фиг. 1;
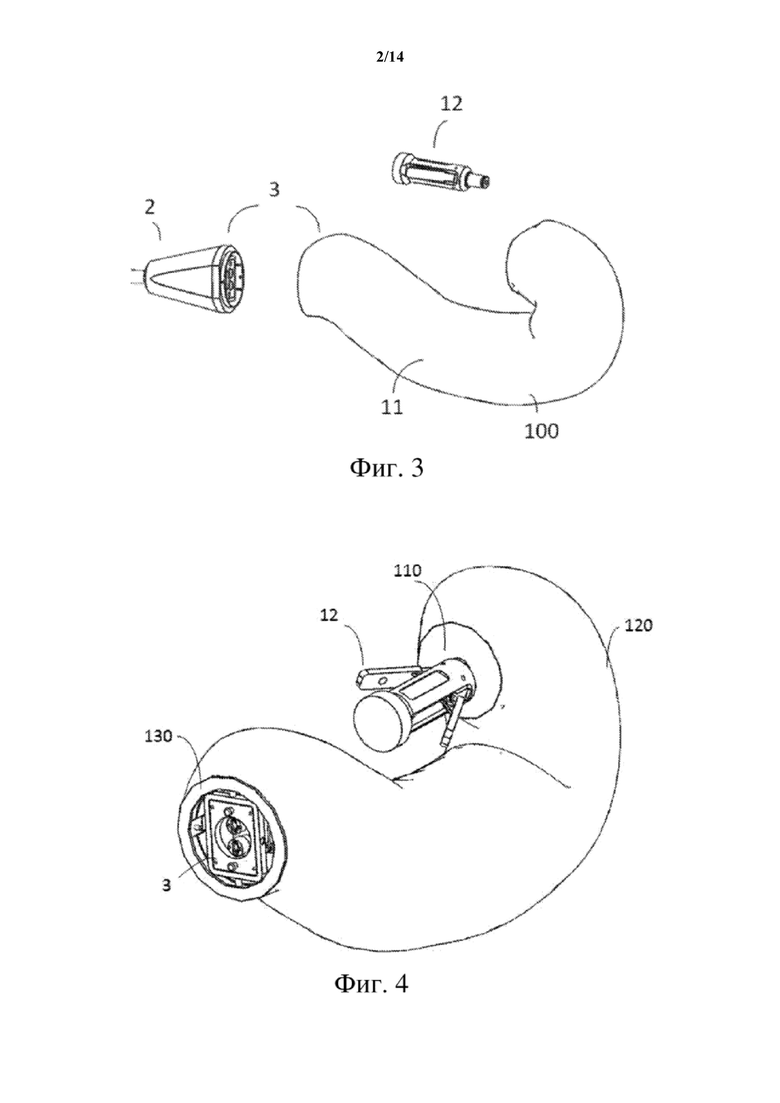
[42] на фиг. 3 показано схематическое изображение в разобранном виде удерживаемого рукой конца, обернутого стерильным пакетом в варианте осуществления настоящего изобретения;
[43] на фиг. 4 показано схематическое изображение удерживаемого рукой конца, обернутого стерильным пакетом в варианте осуществления настоящего изобретения;
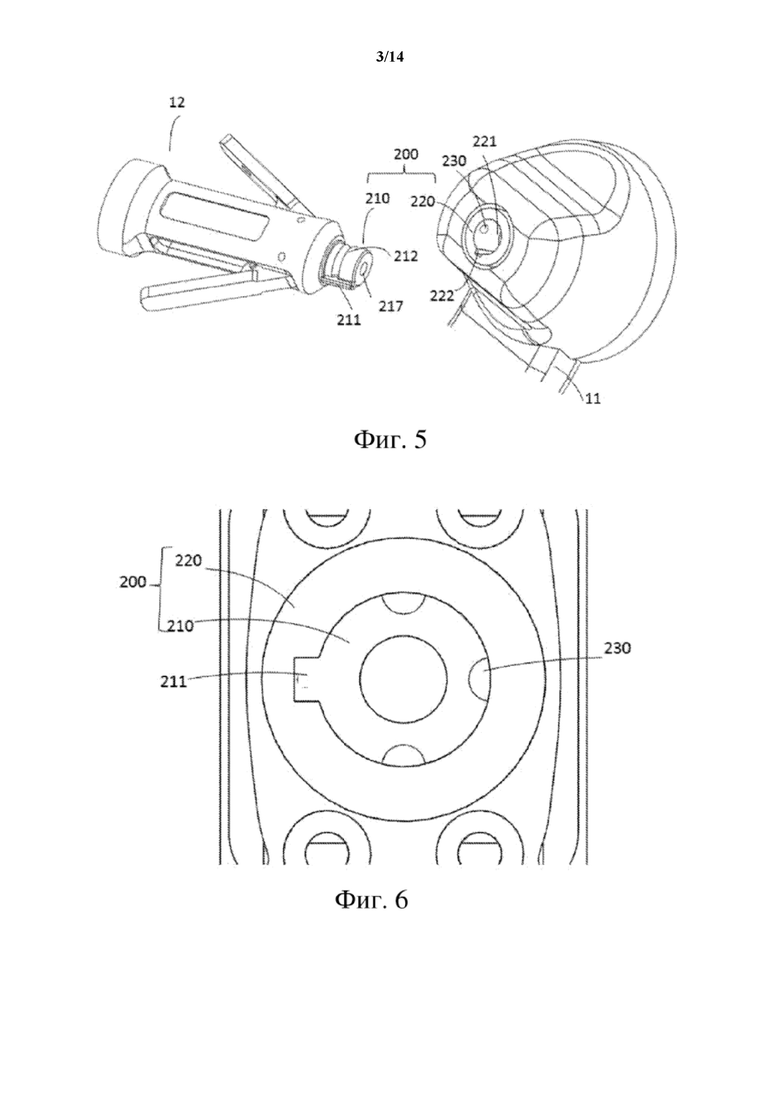
[44] на фиг. 5 показано схематическое изображение элемента для манипулирования и удерживающей конструкции в разобранном состоянии в варианте осуществления настоящего изобретения;
[45] на фиг. 6 показано схематическое изображение устройства сопряжения змеевидного хирургического инструмента в варианте осуществления настоящего изобретения;
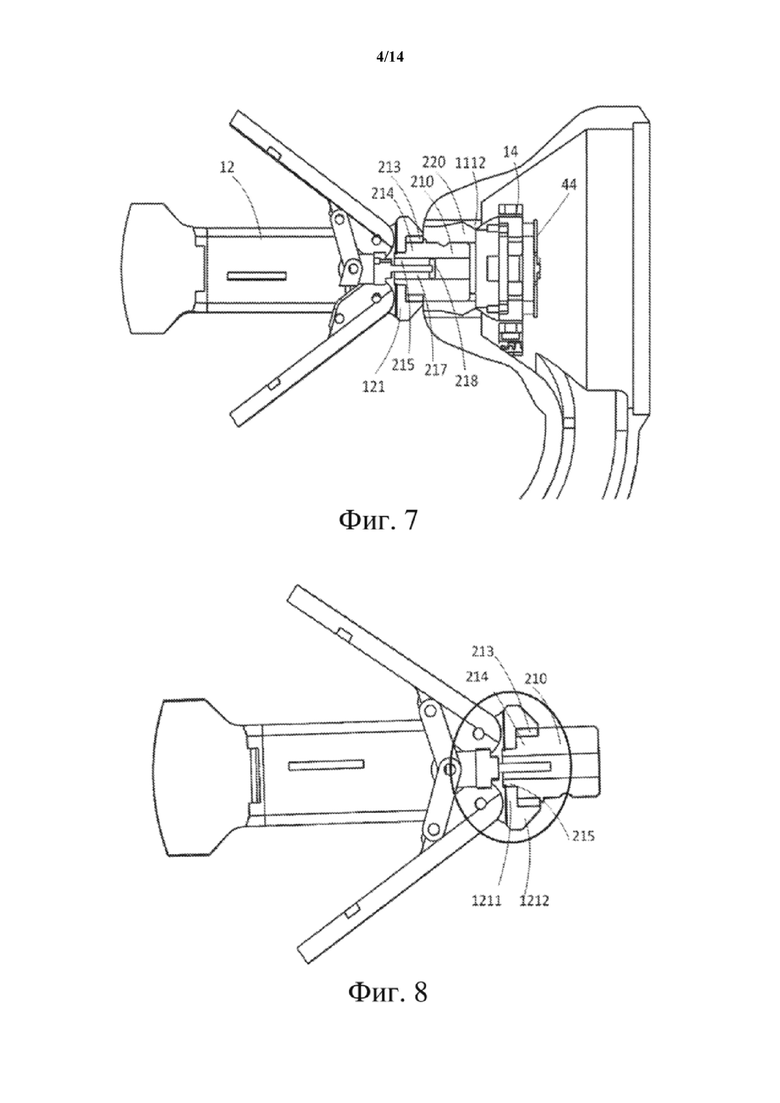
[46] на фиг. 7 показано изображение в сечении устройства для манипулирования в собранном состоянии в варианте осуществления настоящего изобретения;
[47] на фиг. 8 показано схематическое изображение узла, в котором элемент для манипулирования реализует функцию вращения в варианте осуществления настоящего изобретения;
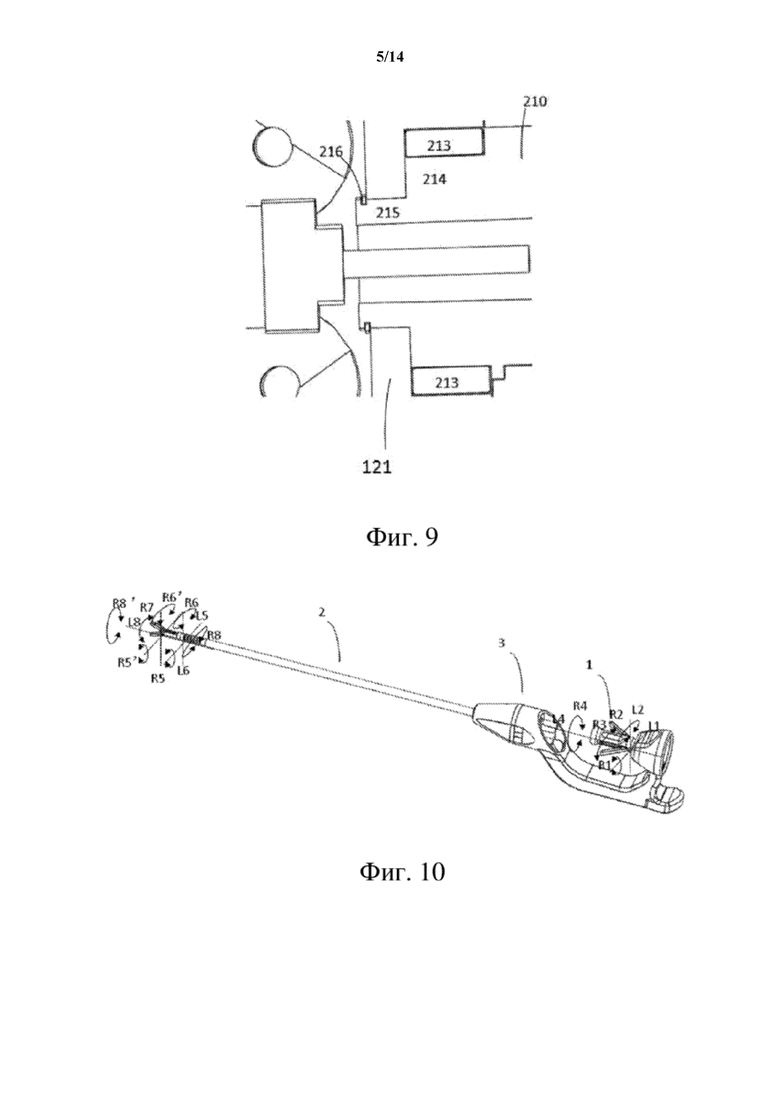
[48] на фиг. 9 показано подробное изображение в увеличенном масштабе узла, показанного на фиг. 8;
[49] На фиг. 10 показано схематическое изображение вращения и степеней свободы движения змеевидного хирургического инструмента в варианте осуществления настоящего изобретения;
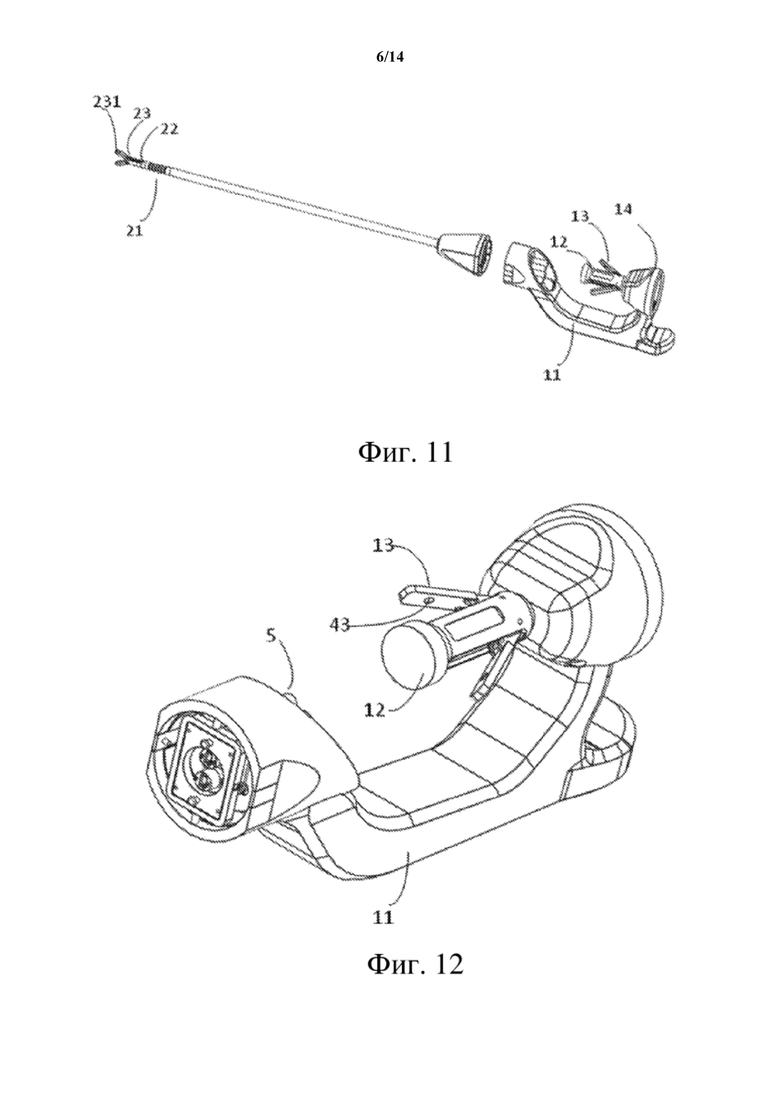
[50] на фиг. 11 показано схематическое изображение разобранного змеевидного хирургического инструмента в варианте осуществления настоящего изобретения;
[51] на фиг. 12 показано схематическое изображение удерживаемого рукой конца змеевидного хирургического инструмента согласно варианту осуществления настоящего изобретения;
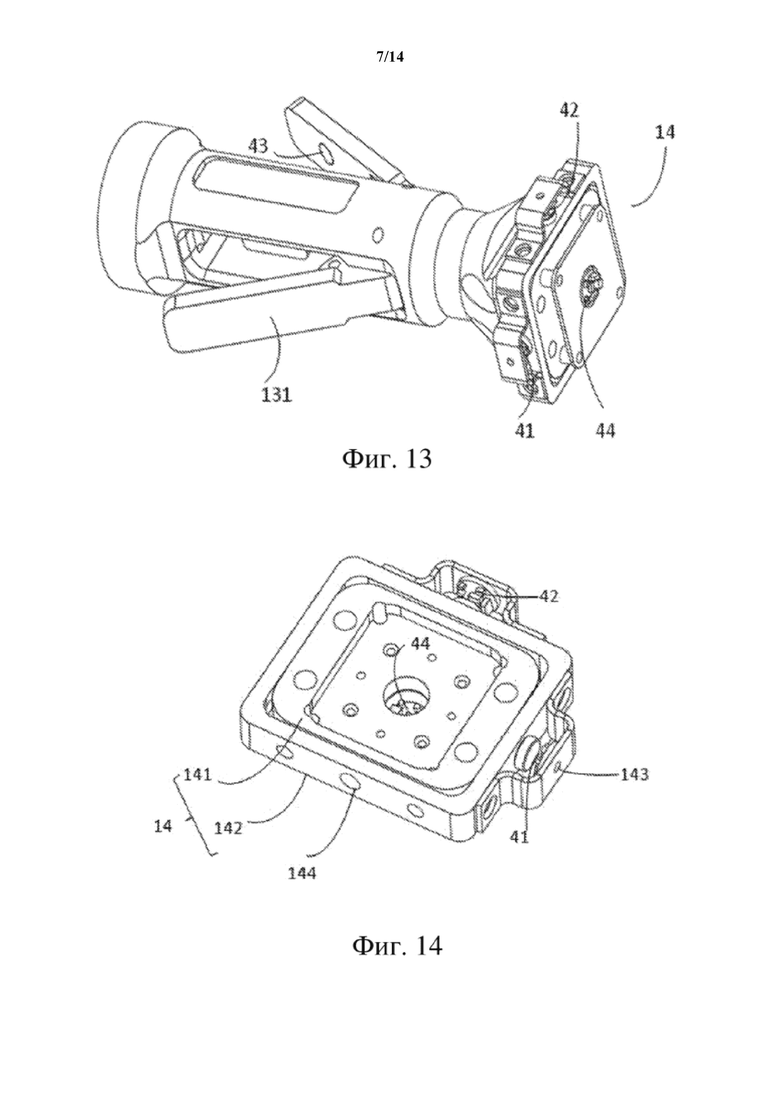
[52] на фиг. 13 и 14 показаны схематические изображения компоновки сенсорного устройства в варианте осуществления настоящего изобретения;
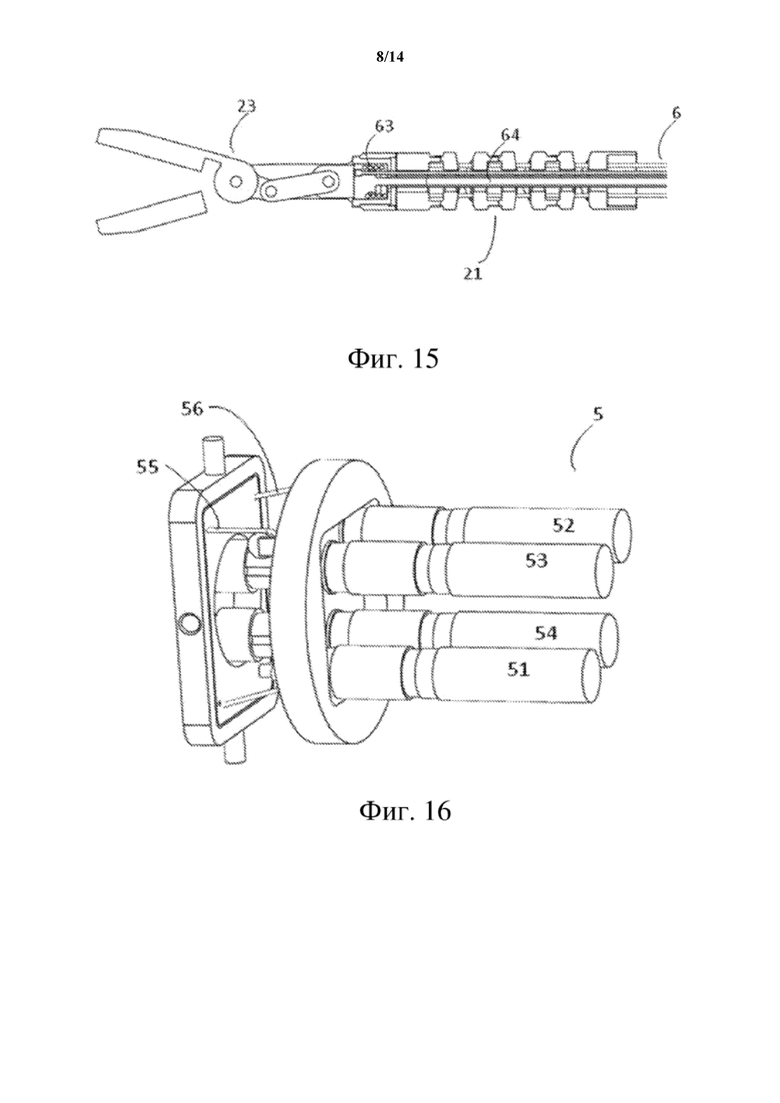
[53] на фиг. 15 показано схематическое изображение соединения между передаточным устройством и концевым исполнительным элементом в варианте осуществления настоящего изобретения;
[54] на фиг. 16 показано схематическое изображение приводного устройства в варианте осуществления настоящего изобретения;
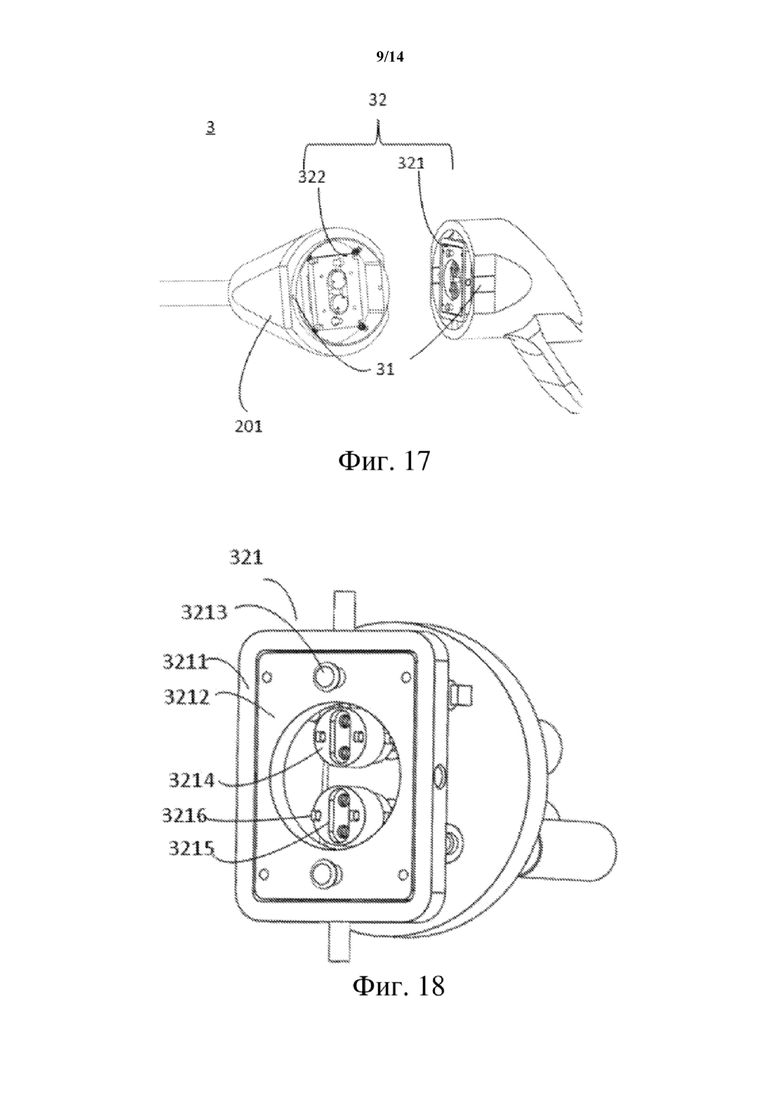
[55] на фиг. 17 показано схематическое изображение быстросменного узла крепления в варианте осуществления настоящего изобретения;
[56] на фиг. 18 показано схематическое изображение элемента обеспечения разъемного соединения на стороне удерживаемого рукой конца в варианте осуществления настоящего изобретения;
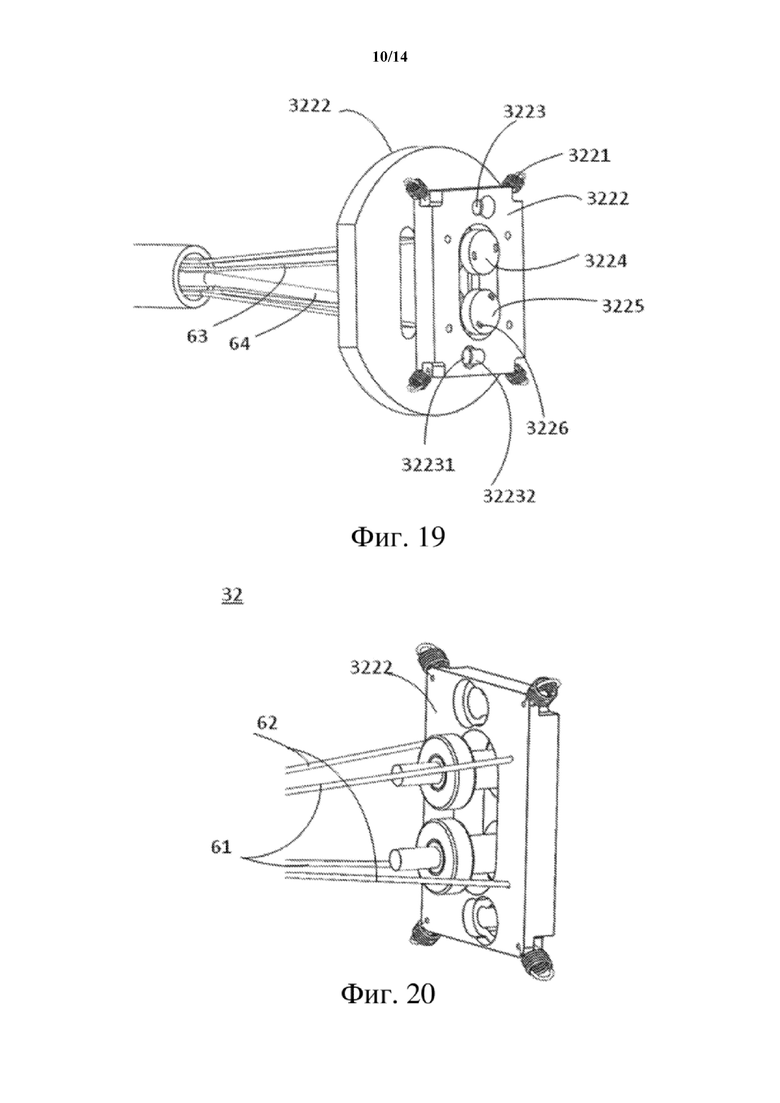
[57] на фиг. 19 показано схематическое изображение элемента обеспечения разъемного соединения на стороне конца сменного инструмента в варианте осуществления настоящего изобретения;
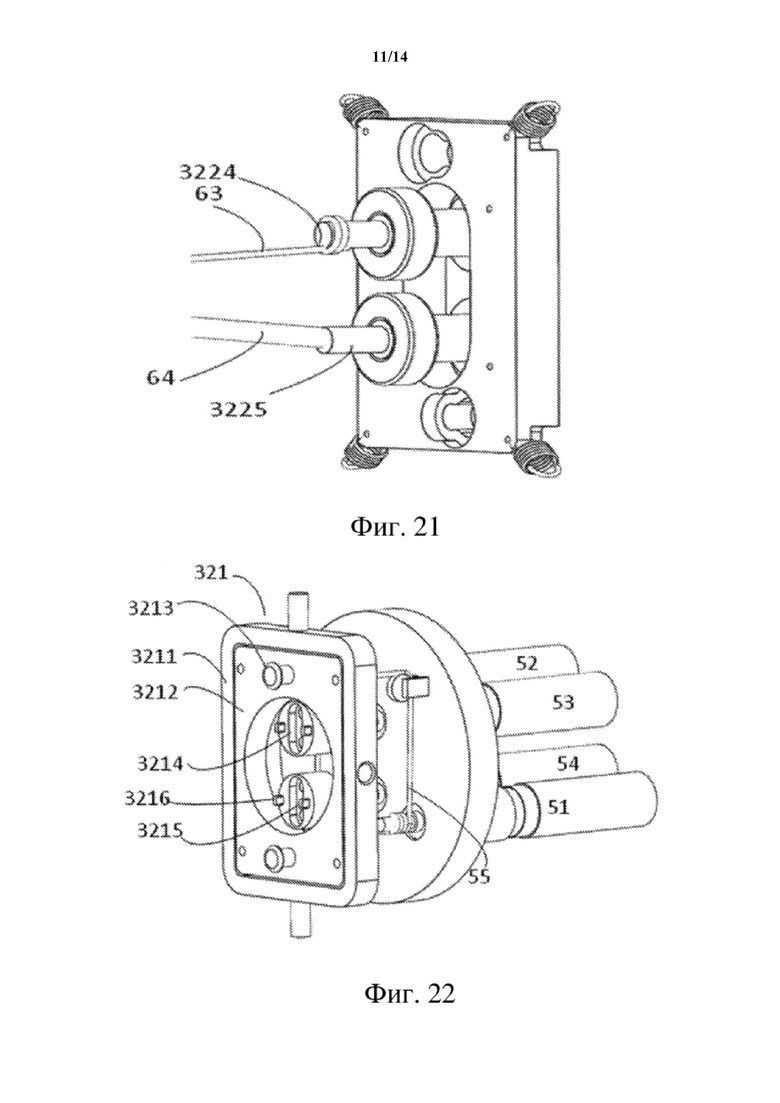
[58] на фиг. 20–21 показаны схематические изображения соединения между элементом обеспечения разъемного соединения и передаточным устройством на стороне конца сменного инструмента в варианте осуществления настоящего изобретения;
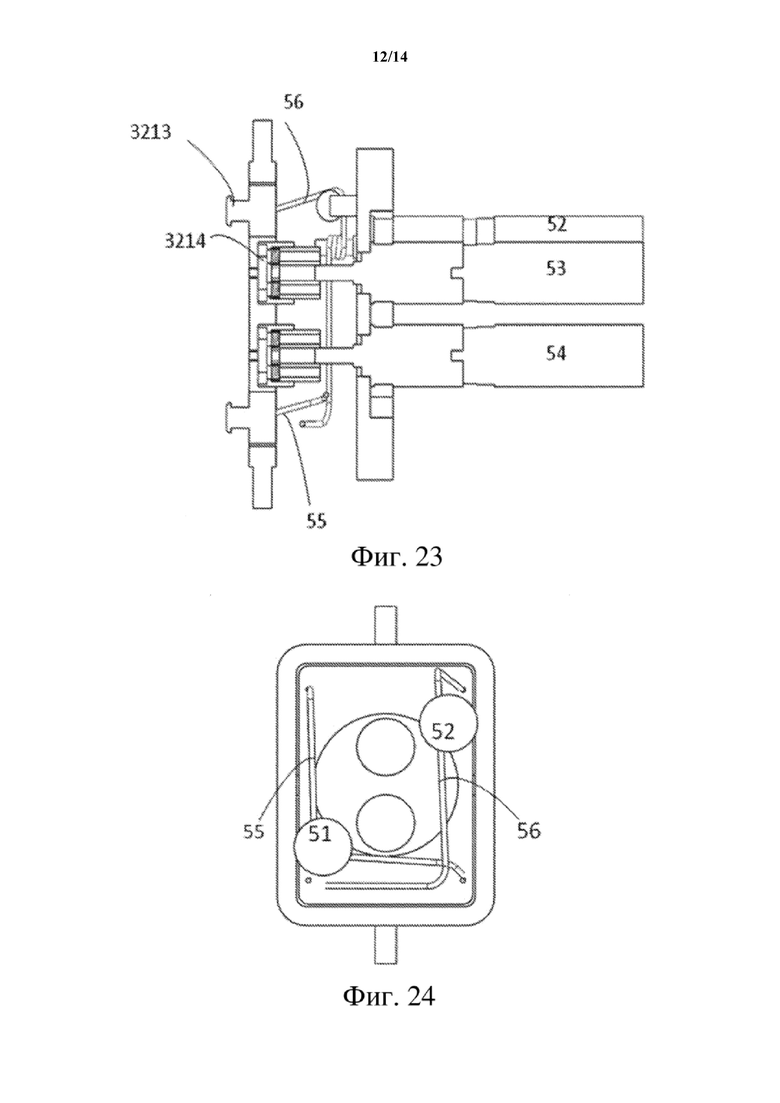
[59] на фиг. 22–24 показаны схематические изображения соединения между элементом обеспечения разъемного соединения и приводным устройством на стороне удерживаемого рукой конца в варианте осуществления настоящего изобретения;
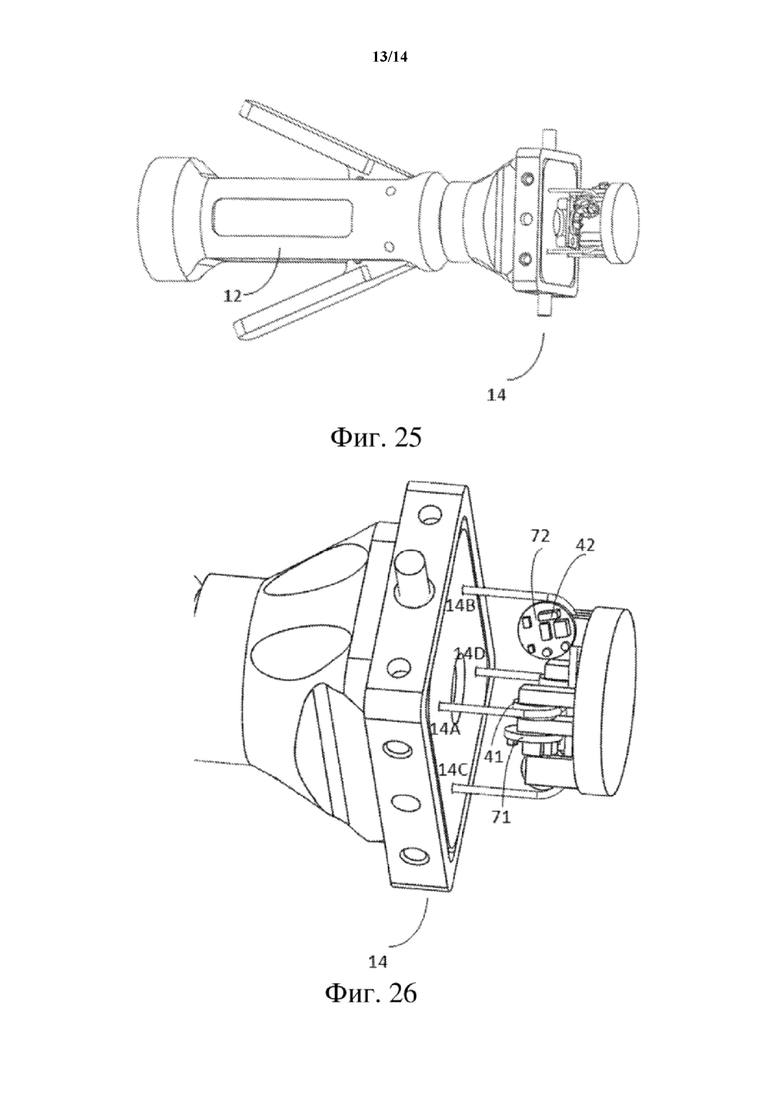
[60] на фиг. 25–26 показаны схематические изображения компоновки сенсорного устройства в другом варианте осуществления настоящего изобретения; и
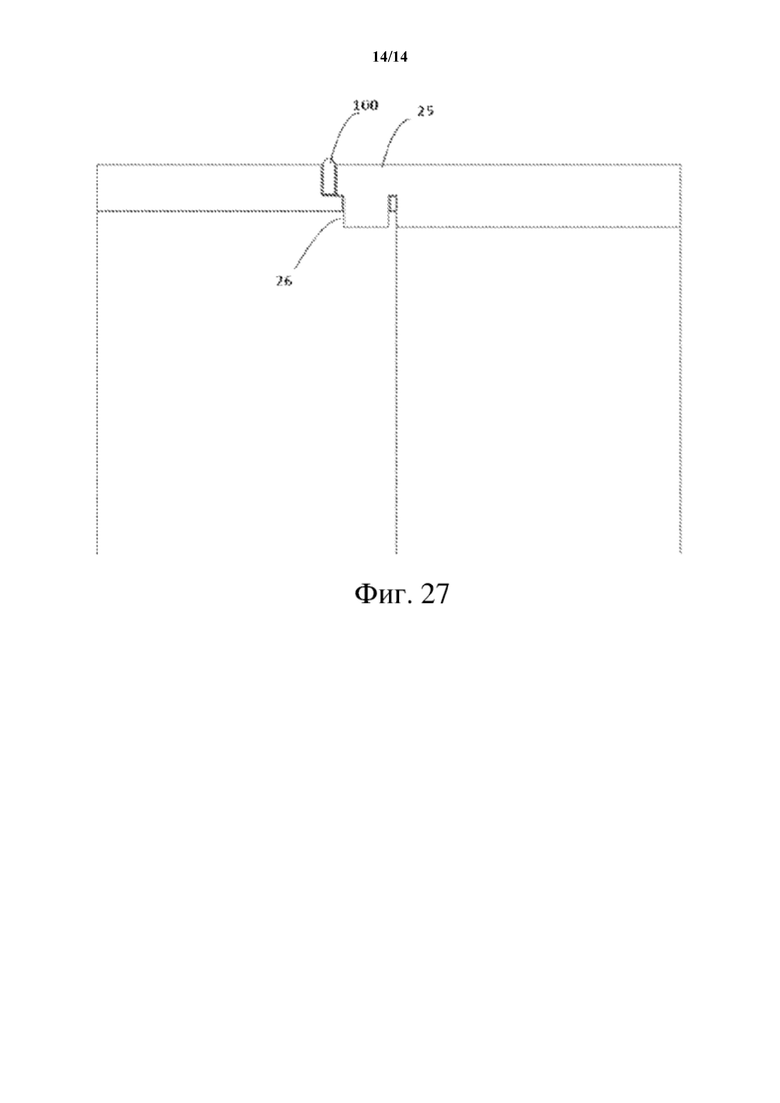
[61] на фиг. 27 показано схематическое изображение крепления стерильного пакета в варианте осуществления настоящего изобретения, в котором элемент для фиксации защелкиванием расположен между удерживаемым рукой концом и сменным инструментом.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[62] Ниже со ссылкой на прилагаемые графические материалы будут подробно описаны варианты осуществления настоящего изобретения, чтобы указанные выше цели, признаки и преимущества настоящего изобретения были более ясными и понятными. В нижеследующем описании объясняется много конкретных подробностей для полного понимания настоящего изобретения. Тем не менее, настоящее изобретение может быть реализовано многими другими способами, которые отличаются от описанных в этом документе, и специалисты в данной области техники могут вносить аналогичные изменения без отступления от настоящего изобретения, и, следовательно, настоящее изобретение не ограничивается конкретными вариантами осуществления, раскрытыми ниже.
[63] Змеевидные хирургические инструменты, предложенные в приведенных в качестве примера вариантах осуществления, раскрытых в настоящем изобретении, будут дополнительно подробно описаны ниже со ссылкой на графические материалы и конкретные варианты осуществления. В настоящем изобретении для простоты понимания применяются термины «проксимальный конец» и «дистальный конец», «верхний конец» и «нижний конец», и эти термины относятся к относительной ориентации, относительному положению и направлению элементов или действий относительно друг друга, как это видит врач, использующий медицинские инструменты. Термины «проксимальный конец», «дистальный конец», «верхний конец» и «нижний конец» не являются ограничительными, но термины «проксимальный конец» и «нижний конец» обычно относятся к концу медицинского устройства, который во время нормальной эксплуатации находится близко к оперирующему хирургу, а термины «дистальный конец» и «верхний конец» обычно относятся к концу, находящемуся от оперирующего хирурга далеко.
[64] Как показано на фиг. 1 и 2, в варианте осуществления настоящего изобретения предусмотрен змеевидный хирургический инструмент, содержащий удерживаемый рукой конец 1, сменный инструмент 2, быстросменный узел 3 крепления и стерильный пакет 100. Удерживаемый рукой конец 1 змеевидного хирургического инструмента является многоразовым. Сменный инструмент 2 выполнен одноразовым или выполнен для использования в течение ограниченного периода времени. Стерильный пакет 100 выполнен одноразовым. Удерживаемый рукой конец 1 соединен с возможностью отсоединения со сменным инструментом 2. В частности, удерживаемый рукой конец 1 и сменный инструмент 2 могут быть быстро разъединены и заменены посредством быстросменного узла 3 крепления. Стерильный пакет 100 может быть свободно обернут на наружную поверхность удерживаемого рукой конца 1, чтобы во время хирургической операции удерживаемый рукой конец 1 все время сохранял стерильное состояние, для предотвращения повреждения внутренних компонентов, вызываемого послеоперационной дезинфекцией и стерилизацией.
[65] К тому же, как показано на фиг. 2, удерживаемый рукой конец 1 содержит удерживающую конструкцию 11, элемент 12 для манипулирования и элемент 14 для запястья. Элемент 12 для манипулирования соединен с возможностью отсоединения с элементом 14 для запястья посредством устройства 200 сопряжения, тем самым упрощая установку и замену стерильного пакета 100. Кроме того, удерживающая конструкция 11 содержит проксимальное посадочное место 111, основную часть 112 удерживающей конструкции и дистальное посадочное место 113. Элемент 14 для запястья размещен в дистальной поверхности проксимального посадочного места 111 удерживающей конструкции 11 и соединен с удерживающей конструкцией 11.
[66] Как показано на фиг. 2, стерильный пакет 100 имеет кольцевой рукав 110 конца для запястья, основную часть 120 стерильного пакета и кольцевой рукав 130 конца для инструмента, которые соединены последовательно и находятся в сообщении друг с другом. Кольцевой рукав 110 конца для запястья и кольцевой рукав 130 конца для инструмента имеют деформируемую конструкцию и/или выполнены из деформируемых материалов для реализации функции стягивания и уплотнения после прекращения действия внешней силы. Деформируемая конструкция может представлять собой упругую конструкцию, такую как зажимное кольцо и т.п. Деформируемый материал представляет собой, например, эластичный материал, такой как спандекс и т.п., или материал с памятью формы, например PTT (политриметилен терефталат), и т.п. Стерильный пакет 100 выполнен с возможностью функционального обертывания на поверхность удерживающей конструкции 11 и удаления с удерживающей конструкции 11.
[67] Кроме того, как показано на фиг. 4, кольцевой рукав 110 конца для запястья выполнен с возможностью плотного прилегания на дистальной поверхности элемента 14 для запястья, и диаметр кольцевого рукава 110 конца для запястья в состоянии естественного прилегания (без приложения внешней силы) меньше, чем диаметр устройства 200 сопряжения, для обеспечения того, чтобы удерживающая конструкция 11 могла достигать герметичного состояния после установки элемента 12 для манипулирования посредством устройства 200 сопряжения. Кольцевой рукав 130 конца для инструмента может плотно прилегать на дистальной поверхности дистального посадочного места 113 удерживающей конструкции 11, и диаметр кольцевого рукава 130 конца для инструмента в состоянии естественного прилегания меньше наружного диаметра дистального посадочного места 113 удерживающей конструкции 11, чтобы кольцевой рукав 130 конца для инструмента плотно прилегал на дистальной поверхности дистального посадочного места 113 удерживающей конструкции 11 в растянутом состоянии. Следовательно, кольцевой рукав 130 конца для инструмента не будет влиять на установку и отсоединение быстросменного узла 3 крепления. Кроме того, кольцевой рукав 130 конца для инструмента и/или кольцевой рукав 110 конца для запястья выполнены таким образом, что их максимальный диаметр по меньшей мере больше, чем диаметр поперечного сечения удерживающей конструкции 11, чтобы кольцевой рукав 130 конца для инструмента и/или кольцевой рукав 110 конца для запястья могли проходить через различные части удерживающей конструкции 11 для обертывания удерживающей конструкции 11. Термин «максимальный диаметр» в контексте данного документа может подразумевать диаметр кольцевого рукава 130 конца для инструмента или кольцевого рукава 110 конца для запястья при приложении максимальной внешней силы. Максимальная внешняя сила относится к максимальной внешней силе, которая может быть приложена при условии, что кольцевой рукав 130 конца для инструмента или кольцевой рукав 110 конца для запястья еще могут восстановить свою первоначальную форму после прекращения приложения внешней силы. Когда поперечное сечение не является круглым, термин «диаметр поперечного сечения» в контексте данного документа относится к диаметру наименьшего круга, описанного вокруг поперечного сечения. Основная часть 120 стерильного пакета изготовлена из исходных материалов из медицинского полиэтилена, и основная часть 120 стерильного пакета соединена с кольцевым рукавом 130 конца для инструмента и кольцевым рукавом 110 конца для запястья посредством клея, применяемого в горячем состоянии.
[68] Далее, беря в качестве примера кольцевой рукав 130 конца для инструмента, выполненный по меньшей мере с максимальным диаметром, большим, чем диаметр поперечного сечения удерживающей конструкции 11, чтобы проиллюстрировать, как обернуть удерживающую конструкцию 11 стерильным пакетом 100 через конец, где расположен кольцевой рукав 130 конца для инструмента. Когда необходимо использовать хирургический инструмент, сначала элемент 12 для манипулирования отделяют от элемента 14 для запястья, и сменный инструмент 2 отделяют от удерживаемого рукой конца 1, как показано на фиг. 2. Затем кольцевой рукав 130 конца для инструмента стерильного пакета 100 оборачивают на удерживающую конструкцию 11 со стороны элемента 14 для запястья до тех пор, пока кольцевые рукава, расположенные на двух концах стерильного пакета 100, соответственно не будут обернуты на два конца удерживающей конструкции 11. Поскольку кольцевые рукава на обоих концах стерильного пакета 100 имеют функции стягивания и уплотнения, кольцевой рукав 110 конца для запястья может плотно прилегать на дистальной поверхности проксимального посадочного места 111 удерживающей конструкции 11, и кольцевой рукав 130 конца для инструмента может плотно прилегать на дистальной поверхности дистального посадочного места 113 удерживающей конструкции 11, и основная часть 120 стерильного пакета оборачивает наружную часть основной части 112 удерживающей конструкции, как показано на фиг. 3. Наконец, сменный инструмент 2 соединен с удерживаемым рукой концом 1 посредством быстросменного узла 3 крепления, и элемент 12 для манипулирования соединен с удерживающей конструкцией 11 удерживаемого рукой конца 1 посредством устройства 200 сопряжения. На этом этапе может быть достигнута асептическая изоляция удерживаемой рукой части, как показано на фиг. 4 и 1. Основная часть 120 стерильного пакета имеет подходящий диаметр, чтобы вмещать основную часть 112 удерживающей конструкции удерживаемого рукой конца 1 без влияния на осуществление операции оперирующим хирургом. Более того, основная часть 120 стерильного пакета имеет достаточную упругость, стойкость к истиранию и сопротивление проскальзыванию, что может предотвратить разрыв основной части 120 стерильного пакета во время операции.
[69] После окончания операции сначала сменный инструмент 2 и элемент 12 для манипулирования могут быть отсоединены от удерживаемого рукой конца 1 для послеоперационной дезинфекции. Затем в направлении, противоположном направлению установки стерильного пакета 100, начиная с дистального посадочного места 113 удерживающей конструкции 11, кольцевой рукав 130 конца для инструмента стерильного пакета 100 обеспечивает постепенное отделение основной части 120 стерильного пакета от удерживаемого рукой конца 1, пока стерильный пакет 100 не будет полностью отделен от удерживаемого рукой конца 1.
[70] В вышеуказанном варианте осуществления основная часть 120 стерильного пакета не обязательно выполнена с функцией уплотнения. То есть в это время в случае, если кольцевой рукав 130 конца для инструмента и/или кольцевой рукав 110 конца для запястья обладают деформируемостью и диаметр основной части 120 стерильного пакета является достаточно большим, чтобы обеспечить прохождение через него основной части 112 удерживающей конструкции. Разумеется, весь стерильный пакет 100 может обладать деформируемостью и может возвращаться в состояние естественного прилегания после прекращения приложения внешней силы.
[71] В варианте осуществления элемент 12 для манипулирования и элемент 14 для запястья соединены с возможностью отсоединения друг с другом посредством устройства 200 сопряжения. Элемент 14 для запястья может иметь более одной степени свободы, чтобы элемент 12 для манипулирования мог вращаться в более чем одном направлении относительно удерживающей конструкции 11. В частности, как показано на фиг. 5–9, устройство 200 сопряжения содержит соединительный штифт 210, расположенный на проксимальном конце элемента 12 для манипулирования, и полый соединительный вал 220, расположенный на элементе 14 для запястья удерживаемого рукой конца 1 и сопрягающийся с соединительным штифтом 210. Полый соединительный вал 220 снабжен сквозным отверстием 221 в центре него, и диаметр сквозного отверстия 221 совпадает с наружным диаметром основной части штифта соединительного штифта 210 для соединения с возможностью отсоединения с соединительным штифтом 210. Кроме того, устройство 200 сопряжения дополнительно содержит осевой ограничивающий элемент, который ограничивает осевое движение соединительного штифта 210, и окружной ограничивающий элемент, который ограничивает вращение по окружности соединительного штифта 210. Окружной ограничивающий элемент содержит соединительный элемент 211 и первый фиксирующий паз 222. Соединительный элемент 211 расположен на поверхности основной части штифта соединительного штифта 210 и расположен вдоль осевого направления. Первый фиксирующий паз 222 расположен на внутренней поверхности сквозного отверстия 221 полого соединительного вала 220 и расположен вдоль осевого направления. Первый фиксирующий паз 222 взаимодействует с соединительным элементом 211, расположенным на поверхности основной части штифта для ограничения относительного вращения соединительного штифта 210 и полого соединительного вала 220. Дополнительно осевой ограничивающий элемент содержит второй фиксирующий паз 212 и упругое фиксирующее устройство 230, соединенное при помощи защелкивания со вторым фиксирующим пазом 212. В данном варианте осуществления отсутствует конкретное ограничение количества соединительных элементов 211 и первых фиксирующих пазов 222, то есть, количество соединительных элементов 211 и первых фиксирующих пазов 222 может быть один или больше, и количество соединительных элементов 211 может быть равно или меньше количества первых фиксирующих пазов 222. Второй фиксирующий паз 212 расположен на поверхности основной части штифта соединительного штифта 210 и расположен вдоль окружности поверхности основной части штифта. Соответственно, упругое фиксирующее устройство 230 расположено на внутренней поверхности сквозного отверстия 221 полого соединительного вала 220. Когда основная часть штифта соединительного штифта 210 установлена в сквозном отверстии 221 полого соединительного вала 220, упругое фиксирующее устройство 230 может быть зажато во втором фиксирующем пазу 212 соединительного штифта 210 для реализации осевого ограничения основной части штифта соединительного штифта 210. Кроме того, упругое фиксирующее устройство 230 может быть по меньшей мере одним упругим выступом. К тому же, как показано на фиг. 6, предусмотрены три упругих выступа. Кроме того, второй фиксирующий паз 212 может проходить в направлении по окружности соединительного штифта 210 с образованием замкнутого контура. Аналогичным образом, количество вторых фиксирующих пазов 212 вдоль осевого направления соединительного штифта 210 и количество упругих фиксирующих устройств 230 вдоль осевого направления сквозного отверстия 221 конкретно не ограничено.
[72] В данном варианте осуществления упругое фиксирующее устройство 230 взаимодействует со вторым фиксирующим пазом 212 с образованием осевого ограничивающего элемента для ограничения осевого перемещения соединительного элемента 210. Первый фиксирующий паз 222 взаимодействует с соединительным элементом 211 с образованием окружного ограничивающего элемента для ограничения вращения по окружности соединительного штифта 210. Как осевой ограничивающий элемент, так и окружной ограничивающий элемент могут быть заменены другими подходящими элементами.
[73] Кроме того, как показано на фиг. 7, элемент 14 для запястья расположен на проксимальном посадочном месте 111 удерживающей конструкции 11 удерживаемого рукой конца 1. Проксимальное посадочное место 111 снабжено каналом 1112 для прохождения через него полого соединительного вала 220, и диаметр канала 1112 является достаточно большим, чтобы избежать ограничения диапазона движения элемента 12 для манипулирования, тем самым обеспечивая свободное приведение в движение элементом 12 для манипулирования элемента 14 для запястья через устройство 200 сопряжения без влияния проксимального посадочного места 111.
[74] Когда элемент 12 для манипулирования установлен, соединительный элемент 211 на поверхности основной части штифта соединительного штифта 210 выровнен с первым фиксирующим пазом 222 во внутренней поверхности полого соединительного вала 220 для ограничения смещения в направлении по окружности основной части штифта соединительного штифта 210. Основная часть штифта соединительного штифта 210 проходит через канал 1112 на проксимальном посадочном месте 111 вдоль дорожки, образованной взаимодействием соединительного элемента 211 с первым фиксирующим пазом 222, и проталкивается в полый соединительный вал 220 вдоль оси. При давлении основной части штифта упругий выступ 230 преодолевает силу упругости внутренней пружины, движется вдоль радиального направления полого соединительного вала 220 в направлении пружины и сжимает пружину. Основная часть штифта соединительного штифта 210 непрерывно проталкивается в полый соединительный вал 220. Когда второй фиксирующий паз 212 на поверхности основной части штифта соединительного штифта 210 соответствует упругому выступу 230 на внутренней поверхности полого соединительного вала 220, упругий выступ 230 защелкивается на втором фиксирующем пазу 212 под действием силы упругости внутренней пружины для ограничения дополнительного осевого смещения основной части штифта соединительного штифта 210. На данный момент установка элемента 12 для манипулирования завершена.
[75] В другом варианте осуществления элемент 12 для манипулирования может также вращаться вокруг своей собственной оси относительно элемента 14 для запястья. Кроме того, в центре соединительного штифта 210 вдоль осевого направления предусмотрено сквозное отверстие 217. Элемент 12 для манипулирования и соединительный штифт 210 соединены друг с другом посредством подшипника 213 для реализации вращательного движения элемента 12 для манипулирования. В частности, как показано на фиг. 7–9, проксимальный конец элемента 12 для манипулирования содержит опору 121 для подшипника, к которой неподвижно присоединено внешнее кольцо подшипника 213. Дистальный конец соединительного штифта 210 содержит первый уступ 214, неподвижно присоединенный к внутреннему кольцу подшипника 213 в радиальном направлении. Кроме того, первый уступ 214 является смежным с проксимальной поверхностью опоры 121 для подшипника в осевом направлении. Более конкретно, продольная секция опоры 121 для подшипника имеет форму неправильного конца, например торическую форму, и содержит основание 1211 и дополнительную часть 1212, неподвижно присоединенную к основанию 1211. В дополнительной части 1212 предусмотрена полость, и она выполнена с возможностью вмещения и фиксации подшипника 213. Диаметр полости дополнительной части 1212 совпадает с диаметром внешнего кольца подшипника 213. Первый уступ 214 может взаимодействовать с подшипником 121, и дистальная поверхность первого уступа 214 находится в контакте с проксимальным концом основания 1211 опоры 121 для подшипника. К тому же, как показано на фиг. 9, соединительный штифт 210 дополнительно содержит второй уступ 215. Второй уступ 215 расположен на дистальном конце первого уступа 214 соединительного штифта 210 и проходит через опору 121 для подшипника, и паз (не обозначен) предусмотрен на втором уступе 215 вблизи дистальной поверхности опоры 121 для подшипника для вмещения пружинного кольца 216. Таким образом, когда соединительный штифт 210 собран на опоре 121 для подшипника элемента 12 для манипулирования через подшипник 213, соотношение прилегания между пружинным кольцом 216 и/или первым уступом 214 и подшипником 121 ограничивает осевое движение и движение по окружности соединительного штифта 210. Тем самым элемент 12 для манипулирования может реализовать вращательное движение.
[76] Сменный инструмент 2 содержит змеевидный элемент 21, опорное гнездо 22 для инструмента и концевой исполнительный элемент 23, которые соединены последовательно.
[77] На фиг. 10 также показаны степени свободы движения змеевидного хирургического инструмента. В варианте осуществления, показанном на фиг. 10, удерживаемый рукой конец 1 может синхронно приводить змеевидный элемент 21 в движение и тем самым приводить в движение концевой исполнительный элемент 23. В этом варианте осуществления направление движения змеевидного элемента 21 также задано таким же, что и направление движения элемента 12 для манипулирования удерживаемого рукой конца 1. В частности, элемент 14 для запястья имеет две степени свободы: первую степень R1 свободы и вторую степень R2 свободы. Соответственно, элемент 14 для запястья может выполнять первое вращательное движение вокруг первой оси L1 (движение поворота вокруг поперечной оси в варианте осуществления) и второе вращательное движение вокруг второй оси L2 (движение поворота вокруг вертикальной оси в варианте осуществления). Змеевидный элемент 21 имеет две вращательных степени свободы: пятую степень R5 свободы и шестую степень R6 свободы. Соответственно, змеевидный элемент 21 может выполнять пятое вращательное движение вокруг пятой оси L5 (движение поворота вокруг поперечной оси в варианте осуществления) и шестое вращательное движение вокруг шестой оси L6 (движение поворота вокруг вертикальной оси в варианте осуществления). Кроме того, элемент 12 для манипулирования заставляет элемент 14 для запястья выполнять движение поворота вокруг поперечной оси относительно первой оси L1 и соответственно заставляет змеевидный элемент 21 выполнять движение поворота вокруг поперечной оси в том же направлении относительно пятой оси L5, тем самым заставляя концевой исполнительный элемент 23 выполнять движение поворота вокруг поперечной оси в том же направлении. Кроме того, первая ось L1 параллельна пятой оси L5. Элемент 12 для манипулирования заставляет элемент 14 для запястья выполнять движение поворота вокруг вертикальной оси относительно второй оси L2 и заставляет змеевидный элемент 21 совершать движение поворота вокруг вертикальной оси в том же направлении относительно соответствующей шестой оси L6, тем самым заставляя концевой исполнительный элемент 23 совершать движение поворота вокруг вертикальной оси в том же направлении. Кроме того, вторая ось L2 параллельна шестой оси L6. Таким образом, концевой исполнительный элемент 23 имеет две степени свободы R5’ и R6’.
[78] В этом варианте осуществления в отношении типа и формы концевого исполнительного элемента 23 нет особых ограничений, и он может быть выбран врачом в зависимости от потребностей хирургической операции. Например, концевой исполнительный элемент 23 может быть ножницами, щипцами, зажимом, пинцетом и другим концевым исполнительным элементом 23 с несколькими типами рабочих концов, или также может быть электродинамическими концевыми исполнительными элементами 23, такими как резистивный нагреватель, компоненты электропривода и т.д. Разумеется, в зависимости от того, что нужно врачу, концевой исполнительный элемент 23 может также быть выбран других форм, например концевой исполнительный элемент 23 с одним типом рабочего конца, таким как крюк.
[79] Ввиду разных типов концевых исполнительных элементов 23 змеевидные хирургические инструменты могут иметь разные степени свободы. Например, концевой исполнительный элемент 23 содержит по меньшей мере один рабочий конец 231, который с возможностью вращения соединен с опорным гнездом 22 для инструмента, как показано на фиг. 11. В этом случае концевой исполнительный элемент 23 получает одну степень свободы. В варианте осуществления, показанном на фиг. 10, концевой исполнительный элемент 23 представляет собой щипцы. Поэтому концевой исполнительный элемент 23 дополнительно имеет третью степень свободы, такую как степень свободы R7 для открывания и закрывания, чтобы выполнялось зажатие. Как показано на фиг. 12, соответственно, удерживаемый рукой конец 1 дополнительно содержит устройство 13 управления открыванием и закрыванием, расположенное на элементе 12 для манипулирования, устройство 13 управления открыванием и закрыванием может вращаться относительно элемента 12 для манипулирования с обеспечением третьей степени свободы R3, за счет чего происходит управление движением открывания и закрывания концевого исполнительного элемента 23. Конфигурация движения устройства 13 управления открыванием и закрыванием удерживаемого рукой конца задана такой же, как и конфигурация открывания и закрывания концевого исполнительного элемента 23, то есть когда устройство 13 управления открыванием и закрыванием открывается, то происходит открывание концевого исполнительного элемента 23, а когда устройство 13 управления открыванием и закрыванием закрывается, то происходит закрывание концевого исполнительного элемента 23, в результате чего зажатие завершается.
[80] В другом варианте осуществления элемент 12 для манипулирования удерживаемого рукой конца 1 может также иметь четвертую степень свободы R4, чтобы элемент 12 для манипулирования мог быть выполнен с возможностью вращения вокруг собственной оси L4 относительно элемента 14 для запястья. Соответственно, опорное гнездо 22 для инструмента имеет восьмую степень свободы R8, чтобы опорное гнездо 22 для инструмента могло быть выполнено с возможностью вращения вокруг собственной оси L8 относительно змеевидного элемента 21. Элемент 12 для манипулирования вращается вокруг собственной оси с обеспечением вращения опорного гнезда 22 для инструмента вокруг собственной оси L8 в том же направлении, чтобы концевой исполнительный элемент 23 имел четвертую степень свободы R8’.
[81] Как показано на фиг. 12 и 15, змеевидный хирургический инструмент также содержит сенсорное устройство, контроллер (не показан), приводное устройство 5 и передаточное устройство 6. Сенсорное устройство, контроллер и приводное устройство 5 расположены на удерживаемом рукой конце 1. Передаточное устройство 6 расположено на сменном инструменте 2. Сенсорное устройство соединено с возможностью связи с контроллером для обнаружения движения элемента 14 для запястья и устройства 13 управления открыванием и закрыванием с получением сигнала движения и передает обнаруженный сигнал движения на контроллер. Контроллер управляет приводным устройством 5 для выработки мощности согласно сигналу движения, обнаруженному сенсорным устройством. Приводное устройство 5 может представлять собой электродвигатель для управления змеевидным элементом 21, опорным гнездом 22 для инструмента или концевым исполнительным элементом 23 через передаточное устройство 6 для завершения соответствующих действий. Например, змеевидный элемент 21 приводится в действие для выполнения движения поворота вокруг поперечной оси относительно пятой оси L5, змеевидный элемент 21 приводится в действие для выполнения движения поворота вокруг вертикальной оси относительно шестой оси L6, концевой исполнительный элемент 23 приводится в действие для выполнения движения открывания и закрывания, или опорное гнездо 22 для инструмента приводится в действие для выполнения вращательного движения вокруг своей собственной оси L8.
[82] Как показано на фиг. 13 и 14, сенсорное устройство может содержать первый датчик 41 для обнаружения движения поворота вокруг поперечной оси элемента 12 для манипулирования. Сенсорное устройство может содержать второй датчик 42 для обнаружения движения поворота вокруг вертикальной оси элемента 12 для манипулирования. Сенсорное устройство может содержать третий датчик 43 для обнаружения движения открывания и закрывания устройства 13 управления открыванием и закрыванием. Сенсорное устройство может содержать четвертый датчик 44 для обнаружения вращательного движения элемента 12 для манипулирования.
[83] В конкретном варианте осуществления, как показано на фиг. 14, элемент 14 для запястья содержит внутреннюю раму 141 и наружную раму 142, соединенные с возможностью вращения с удерживающей конструкцией 11 посредством первого вращающегося вала 143. Внутренняя рама 141 соединена с возможностью вращения с наружной рамой 142 посредством второго вращающегося вала 144. Ось первого вращающегося вала 143 представляет собой первую ось. Ось второго вращающегося вала 144 представляет собой вторую ось. Полый соединительный вал 220 соединен с внутренней рамой 141. Кроме того, первый вращающийся вал 143 и второй вращающийся вал 144 перпендикулярны друг другу, и плоскость, ограниченная осью первого вращающегося вала 143 и осью второго вращающегося вала 144, представляет собой среднюю плоскость элемента 14 для запястья. Угол, образованный первым вращающимся валом 143 и вторым вращающимся валом 144, может также представлять собой другие подходящие углы и не ограничивается тем, что является перпендикулярным друг другу.
[84] Первый датчик 41 и второй датчик 42 могут быть кодовыми дисками вращающегося вала, которые соответственно расположены на первом вращающемся валу 143 и втором вращающемся валу 144 элемента 14 для запястья, и соответственно используются для обнаружения движения поворота вокруг поперечной оси и движения поворота вокруг вертикальной оси элемента 14 для запястья. В другом конкретном варианте осуществления первый датчик 41 и второй датчик 42 могут также представлять собой линейные датчики.
[85] В конкретном варианте осуществления, как показано на фиг. 13, устройство 13 управления открыванием и закрыванием содержит по меньшей мере одну заслонку 131 для открывания и закрывания. Проксимальный конец заслонки 131 для открывания и закрывания соединен с возможностью вращения с элементом 12 для манипулирования посредством вращающегося вала. Дистальный конец (т.е. свободный конец) заслонки 131 для открывания и закрывания находится на расстоянии от элемента 12 для манипулирования. Третий датчик 43 может представлять собой датчик Холла, который расположен на заслонке 131 для открывания и закрывания и элементе 12 для манипулирования, чтобы определять расстояние между заслонкой 131 для открывания и закрывания устройства 13 управления открыванием и закрыванием и элементом 12 для манипулирования и тем самым обнаруживать вращательное движение заслонки 131 для открывания и закрывания относительно элемента 12 для манипулирования. В другом конкретном варианте осуществления третий датчик 43 может также представлять собой по меньшей мере один кодовый диск вращающегося вала, который расположен на вращающемся валу проксимального конца заслонки 131 для открывания и закрывания устройства 13 управления открыванием и закрыванием для обнаружения вращательного движения заслонки 131 для открывания и закрывания.
[86] В конкретном варианте осуществления, как показано на фиг. 7–9, элемент 12 для манипулирования соединен с соединительным штифтом 210 посредством подшипника 213 для реализации вращательного движения элемента 12 для манипулирования. Кроме того, соединение с возможностью вращения между элементом 12 для манипулирования и внутренней рамой 141 достигается посредством относительного фиксированного взаимоотношения между соединительным штифтом 210 и полым соединительным валом 220. Магнит 218 дополнительно расположен на проксимальном конце элемента 12 для манипулирования и проходит через сквозное отверстие 217 соединительного штифта 210. Соответственно, четвертый датчик 44 может представлять собой датчик Холла, который может получать сигнал вращения элемента 12 для манипулирования через магнит 218. Четвертый датчик 44 может быть установлен следующим образом. Например, крепежная скоба расположена на задней стороне внутренней рамы 141 элемента 14 для запястья. Четвертый датчик 44 расположен в центре крепежной скобы для обнаружения вращательного движения элемента 12 для манипулирования вокруг собственной оси, как показано на фиг. 13. В других вариантах осуществления, когда соединение с возможностью вращения между элементом 12 для манипулирования и элементом 14 для запястья реализовано не через подшипник 231, а реализовано посредством непосредственного соединения между элементом 12 для манипулирования и элементом 14 для запястья, способ установки четвертого датчика 44 может быть подобным вышеупомянутому способу.
[87] При работе хирургического инструмента первый датчик 41 и второй датчик 42 сенсорного устройства соответственно обнаруживают движение поворота вокруг поперечной оси и движение поворота вокруг вертикальной оси элемента 12 для манипулирования, третий датчик 43 сенсорного устройства обнаруживает движение открывания и закрывания устройства 13 управления открыванием и закрыванием, и четвертый датчик 44 сенсорного устройства обнаруживает вращательное движение элемента 12 для манипулирования и передает обнаруженный сигнал движения на контроллер. Контроллер управляет выходной мощностью приводного устройства 5 согласно сигналу, обнаруженному сенсорным устройством. Приводное устройство 5 приводит в действие змеевидный элемент 21, опорное гнездо 22 для инструмента и концевой исполнительный элемент 23 через передаточное устройство 6 для завершения соответствующего действия по повороту вокруг поперечной оси, действия по повороту вокруг вертикальной оси, вращательного действия и действия по открыванию и закрыванию. Кроме того, направление движения концевого исполнительного элемента 23 задано таким же, что и направления движения элемента 12 для манипулирования и устройства 13 управления открыванием и закрыванием.
[88] Как показано на фиг. 15 и 19–21, передаточное устройство 6 содержит первую группу 61 передаточных проволок и вторую группу 62 передаточных проволок, которые используются для управления движением змеевидного элемента 21. Передаточное устройство 6 содержит первый гибкий передаточный элемент 63 для управления движением открывания и закрывания концевого исполнительного элемента 23. Передаточное устройство 6 содержит второй гибкий передаточный элемент 64 для управления вращением опорного гнезда 22 для инструмента.
[89] Как показано на фиг. 12, приводное устройство 5 расположено на дистальном конце удерживаемого рукой конца 1. В конкретном варианте осуществления, показанном на фиг. 16, приводное устройство 5 содержит первый электродвигатель 51 и второй электродвигатель 52. Первый электродвигатель 51 и второй электродвигатель 52 работают во взаимодействии для приведения быстросменного узла 3 крепления в движение и обеспечения выполнения змеевидным элементом 21 движений поворота вокруг поперечной оси и поворота вокруг вертикальной оси посредством первой группы 61 передаточных проволок и второй группы 62 передаточных проволок, тем самым обеспечивая движения поворота вокруг поперечной оси и поворота вокруг вертикальной оси концевого исполнительного элемента 23. Приводное устройство 5 содержит третий электродвигатель 53, обеспечивающий движение открывания и закрывания концевого исполнительного элемента 23 посредством быстросменного узла 3 крепления и первого гибкого передаточного элемента 63. Приводное устройство 5 содержит четвертый электродвигатель 54, обеспечивающий вращательное движение концевого исполнительного элемента 23 посредством быстросменного узла 3 крепления и второго гибкого передаточного элемента 64.
[90] Как показано на фиг. 17, быстросменный узел 3 крепления содержит элемент 32 обеспечения разъемного соединения. Элемент 32 обеспечения разъемного соединения содержит первый компонент (не обозначен), расположенный на удерживающей конструкции 11, и второй компонент (не обозначен), расположенный на сменном инструменте 2. Первый компонент соединен с возможностью отсоединения со вторым компонентом и может синхронно приводить в движение второй компонент. Кольцевой рукав 130 конца для инструмента герметизирует соединение между первым компонентом и вторым компонентом. Конкретные конструкции первого компонента и второго компонента не ограничены в том случае, если могут быть реализованы разъемное соединение и синхронное движение удерживающей конструкции 11 и сменного инструмента 2.
[91] В конкретном варианте осуществления, показанном на фиг. 18 и 19, первый компонент может представлять собой шарнир Гука 321 дистального посадочного места 113 на стороне удерживаемого рукой конца 1, и второй компонент может представлять собой соединитель 322, расположенный на стороне сменного инструмента 2. Шарнир Гука 321 содержит первую наружную раму 3211 и первую внутреннюю раму 3212. Первая наружная рама 3211 соединена с оболочкой удерживаемого рукой конца 1 и может выполнять десятое вращательное движение вокруг десятой оси. Таким образом, шарнир Гука 321 имеет десятую степень свободы. Первая внутренняя рама 3212 соединена с первой наружной рамой 3211 и может выполнять девятое вращательное движение относительно девятой оси. Таким образом, шарнир Гука 321 имеет девятую степень свободы. Кроме того, десятая ось параллельна шестой оси L6. К тому же, десятая ось дополнительно параллельна второй оси L2. Кроме того, девятая ось параллельна пятой оси L5. К тому же, девятая ось дополнительно параллельна первой оси L1. Соединитель 322 содержит упругое соединительное устройство и соединительную пластину 3222. Соединительная пластина 3222 неподвижно закреплена на корпусе 201 сменного инструмента 2 посредством упругого соединительного устройства, чтобы соединительная пластина 3222 могла выполнять движение поворота вокруг вертикальной оси относительно корпуса 201 сменного инструмента 2. Кроме того, внешний край соединительной пластины 3222 не больше внешнего края первой внутренней рамы 3212. В частности, как показано на фиг. 19, упругое соединительное устройство содержит четыре соединительные пружины 3221, которые расположены соответственно в четырех угловых положениях соединительной пластины 3222. Соединительная пластина 3222 неподвижно закреплена на оболочке сменного инструмента 2 посредством четырех соединительных пружин 3221. В варианте осуществления передаточное устройство 6 соединено со змеевидным элементом 21 и соединителем 322 и выполнено с возможностью обеспечения выполнения змеевидным элементом 21 пятого вращательного движения вместе с девятым вращательным движением шарнира Гука 321 и также выполнено с возможностью обеспечения выполнения змеевидным элементом 21 шестого вращательного движения вместе с десятым вращательным движением шарнира Гука 321.
[92] Кроме того, на первой внутренней раме 3212 для ограничения смещения шарнира Гука 321 и соединителя 322 вдоль осевого направления сменного инструмента 2 расположено ограничительное устройство. Как показано на фиг. 18, кроме того, ограничительное устройство представляет собой по меньшей мере один штифт 3213. Штифт 3213 содержит основную часть штифта и выступающий элемент, выполненный в осевом направлении основной части штифта. Наружный диаметр выступающего элемента больше наружного диаметра основной части штифта указанного штифта 3212. Соответственно, в месте на соединительной пластине 3222, соответствующем штифту 3213, расположено тыквоподобное отверстие 3223 под штифт. Как показано на фиг. 19, тыквоподобное отверстие 3223 под штифт содержит часть 32231 с большим диаметром и часть 32232 с малым диаметром. Диаметр отверстия части 32231 с большим диаметром тыквоподобного отверстия 3223 под штифт соответствует внешнему диаметру выступающего элемента на штифте 3213 для размещения штифта 3213. Диаметр отверстия части 32232 с малым диаметром тыквоподобного отверстия 3223 под штифт по меньшей мере частично соответствует внешнему диаметру основной части штифта указанного штифта 3213. В собранном состоянии штифт 3213 проходит через часть 32231 с большим диаметром тыквоподобного отверстия 3223 под штифт для реализации соединения между шарниром Гука 321 и соединителем 322. Следовательно, шарнир Гука 321 и соединитель 322 вращаются относительно друг друга для перемещения штифта 3213 в часть 32232 с малым диаметром, чтобы могло поддерживаться соединение между шарниром Гука 321 и соединителем 322, и шарнир Гука 321 и соединитель 322 не могут двигаться относительно друг друга в осевом направлении.
[93] Кроме того, быстросменный узел 3 крепления дополнительно содержит элемент 31 для фиксации защелкиванием для ограничения осевого движения и/или движения по окружности между удерживаемым рукой концом 1 и сменным инструментом 2. Настоящее изобретение конкретно не ограничивает конкретную конструкцию элемента для фиксации защелкиванием, и элемент для фиксации защелкиванием может представлять собой любой элемент из известного уровня техники, способный реализовывать функции блокирования и ограничения. В варианте осуществления, показанном на фиг. 27, дистальный конец удерживаемого рукой конца 1 имеет выступ 25, проходящий в направлении внутрь, и проксимальный конец сменного инструмента 2 имеет углубление 26, сопрягаемое с выступом 25. Стерильный пакет 100 может покрывать дистальный конец выступа 25 для его изоляции от сменного инструмента 2.
[94] Как показано на фиг. 20–22, при работе змеевидного хирургического инструмента контроллер управляет первым электродвигателем 51 и вторым электродвигателем 52 для обеспечения вращения концевого исполнительного элемента 23 вместе с вращением элемента 14 для запястья согласно сигналу движения элемента 14 для запястья, обнаруженному сенсорным устройством. В частности, как показано на фиг. 23 и 24, первый электродвигатель 51 обеспечивает вращение шарнира Гука 321 посредством стального провода 55 первого электродвигателя, тем самым обеспечивая синхронное вращение соединителя 322. Аналогичным образом, второй электродвигатель 52 обеспечивает вращение шарнира Гука 321 посредством стального провода 56 второго электродвигателя, тем самым обеспечивая синхронное вращение соединителя 322. Если смотреть от проксимального конца в направлении к дистальному концу, два конца стального провода 55 первого электродвигателя соответственно неподвижно закреплены на верхнем левом углу и нижнем правом углу шарнира Гука 321. Положения точек соединения и неподвижного прикрепления между первой группой 61 передаточных проволок и соединителем 322 и между первой группой 61 передаточных проволок и змеевидным элементом 21 соответствуют положениям точек неподвижного прикрепления двух концов стального провода 55 первого электродвигателя на верхнем левом углу и нижнем правом углу шарнира Гука 321. Два конца стального провода 56 второго электродвигателя соответственно неподвижно закреплены на нижнем левом углу и верхнем правом углу шарнира Гука 321. Положения точек соединения и неподвижного прикрепления между второй группой 62 передаточных проволок и соединителем 322 и между второй группой 62 передаточных проволок и змеевидным элементом 21 соответствуют положениям точек неподвижного прикрепления двух концов стального провода 56 второго электродвигателя на нижнем левом углу и верхнем правом углу шарнира Гука 321. Посредством вышеупомянутой конструкции первый электродвигатель 51 и второй электродвигатель 52 совместно приводят в движение первую группу 61 передаточных проволок и вторую группу 62 передаточных проволок, что обеспечивает вращение змеевидного элемента 21. В альтернативном варианте осуществления оба конца стального провода 55 первого электродвигателя соответственно неподвижно закреплены на десятой оси шарнира Гука 321, и оба конца стального провода 56 второго электродвигателя неподвижно закреплены на девятой оси шарнира Гука 321. Первая группа 61 передаточных проволок и вторая группа 62 передаточных проволок соответственно расположены в соответствии с точками соединения и неподвижного прикрепления соединителя 322 и змеевидного элемента 21.
[95] Кроме того, как показано на фиг. 20, проксимальный конец первой группы 61 передаточных проволок соединен с быстросменным узлом 3 крепления, и первая группа 61 передаточных проволок обеспечивает выполнение концевым исполнительным элементом 23 движения открывания и закрывания под действием быстросменного узла 3 крепления. Проксимальный конец второй группы 62 передаточных проволок соединен с быстросменным узлом 3 крепления, и вторая группа 62 передаточных проволок обеспечивает выполнение концевым исполнительным элементом 23 вращательного движения под действием быстросменного узла 3 крепления.
[96] Кроме того, как показано на фиг. 18–19 и 23, быстросменный узел 3 крепления дополнительно содержит первый упругий телескопический штифт 3214 и первый соединительный вал 3224. Кроме того, быстросменный узел 3 крепления дополнительно содержит второй упругий телескопический штифт 3215 и второй соединительный вал 3225. Кроме того, первый упругий телескопический штифт 3214 и второй упругий телескопический штифт 3215 могут соответственно двигаться в направлении проксимального конца под действием внешней силы и могут двигаться в направлении дистального конца, пока они не достигнут начальных положений под действием своей собственной силы упругости после прекращения приложения внешней силы. Внутренняя рама 3212 шарнира Гука снабжена центральным отверстием. Первый упругий телескопический штифт 3214 и второй упругий телескопический штифт 3215 проходят в направлении дистального конца через центральное отверстие шарнира Гука 321 (т.е. первый компонент). Соответственно, первый соединительный вал 3224 и второй соединительный вал 3225 проходят в направлении проксимального конца через центральное отверстие соединителя 322 (т.е. второй компонент). Проксимальный конец первого соединительного вала 3224 соединен с возможностью отсоединения с дистальным концом первого упругого телескопического штифта 3214, и проксимальный конец второго соединительного вала 3225 соединен с возможностью отсоединения с дистальным концом второго упругого телескопического штифта 3215, за счет чего осуществляется передача или прекращение действия движущего усилия. Кроме того, как показано на фиг. 19, каждая из торцевых поверхностей проксимальных концов первого соединительного вала 3224 и второго соединительного вала 3225 снабжена двумя фиксирующими пазами 3226. Соответственно, как показано на фиг. 18, каждая из торцевых поверхностей дистальных концов первого упругого телескопического штифта 3214 и второго упругого телескопического штифта 3215 снабжена двумя фиксирующими выступами 3216. Фиксирующий паз 3226 на соединительных валах и фиксирующий выступ 3216 на упругих телескопических штифтах выполнены соответственно по форме и положению для реализации соединения с зажиманием между соединительными валами и упругими телескопическими штифтами.
[97] В то же время, как показано на фиг. 21, стальной провод первого гибкого передаточного элемента 63 намотан и неподвижно закреплен на первом соединительном валу 3224. Второй гибкий передаточный элемент 64 неподвижно соединен со вторым соединительным валом 3225. При вращении первого соединительного вала 3224 и второго соединительного вала 3225 первый гибкий передаточный элемент 63 выполняет движения наматывания и разматывания, чтобы вращательное движение преобразовывалось в осевое движение, и второй гибкий передаточный элемент 64 передает крутящий момент на опорное гнездо 22 для инструмента.
[98] Кроме того, концевой исполнительный элемент 23 дополнительно содержит первое реверсивное устройство (не обозначено). Первый гибкий передаточный элемент 63 содержит стальной провод и упругий элемент. Упругий элемент выполнен с возможностью обеспечения приводной силы для поддержания рабочего конца 231 в нормально открытом состоянии. Проксимальный конец стального провода намотан на первый соединительный вал 3224, и дистальный конец стального провода соединен с первым реверсивным устройством. Первое реверсивное устройство используется для преобразования между поступательным движением стального провода и движением открывания и закрывания рабочего конца 231. Третий электродвигатель 53 может приводить в действие первый гибкий передаточный элемент 63 посредством первого упругого телескопического штифта 3214 и первого соединительного вала 3224, и поступательное движение первого гибкого передаточного элемента 63 преобразуется в движение открывания и закрывания концевого исполнительного элемента 23 посредством первого реверсивного устройства. Кроме того, четвертый электродвигатель 54 может приводить второй гибкий передаточный элемент 64 в действие посредством второго упругого телескопического штифта 3215 и второго соединительного вала 3225 для управления вращательным движением концевого исполнительного элемента 23.
[99] При работе змеевидного хирургического инструмента третий датчик 43 и четвертый датчик 44 соответственно обнаруживают сигнал движения открывания и закрывания устройства 13 управления открыванием и закрыванием удерживаемого рукой конца 1 и сигнал вращательного движения элемента 12 для манипулирования и передают обнаруженные сигналы на контроллер, который анализирует обнаруженные сигналы и управляет движением третьего электродвигателя 53 и четвертого электродвигателя 54 соответственно, тем самым приводя в движение первый гибкий передаточный элемент 63 и второй гибкий передаточный элемент 64, чтобы могли быть реализованы движение открывания и закрывания и вращательное движение концевого исполнительного элемента 23 в одном и том же направлении.
[100] В альтернативном варианте осуществления концевой исполнительный элемент 23 дополнительно содержит второе реверсивное устройство и третье реверсивное устройство. Первый гибкий передаточный элемент 63 содержит гибкий вал. По сравнению со стальным проводом возвратно-поступательное движение может быть реализовано только посредством приложения силы на одном конце гибкого вала. В это время первый соединительный вал 3224 соединен со вторым реверсивным устройством, проксимальный конец гибкого вала первого гибкого передаточного элемента 63 может быть непосредственно неподвижно закреплен на втором реверсивном устройстве, и его дистальный конец соединен с третьим реверсивным устройством, чтобы рабочий конец приводился в действие для реализации движения открывания и закрывания. При такой конфигурации можно преобразовывать вращательное движение первого соединительного вала 3224 в поступательное движение гибкого вала первого гибкого передаточного элемента 63 и тем самым управлять движением открывания и закрывания концевого исполнительного элемента 23. Второе реверсивное устройство представляет собой устройство, способное преобразовывать вращательное движение первого соединительного вала в поступательное движение гибкого вала. Третье реверсивное устройство представляет собой устройство, способное преобразовывать поступательное движение гибкого вала в движение открывания и закрывания рабочего конца 231. Например, реечно-шестеренчатая конструкция, конструкция, предусматривающая взаимодействие прямолинейного пути и вращающегося вала, червячно-зубчатая конструкция и т.п.
[101] В другом альтернативном варианте осуществления передаточное устройство 6 содержит первую часть, расположенную на удерживаемом рукой конце 1, и вторую часть, расположенную на сменном инструменте 2. Проксимальный конец первой части соединен со змеевидным элементом 21, и ее дистальный конец соединен с первым компонентом и выполнен с возможностью обеспечения движения первого компонента вместе с движением змеевидного элемента 21. Проксимальный конец второй части соединен со вторым компонентом, и ее дистальный конец соединен со змеевидным элементом 21 и выполнен с возможностью обеспечения движения змеевидного элемента 21 вместе с движением второго компонента. Таким образом, для змеевидного хирургического инструмента в варианте осуществления применяется способ приведения в действие полностью вручную для реализации работы концевого исполнительного элемента 23.
[102] В других вариантах осуществления настоящего изобретения дополнительно предусмотрен набор деталей для змеевидного хирургического инструмента, содержащий змеевидный хирургический инструмент и стерильный пакет 100. Змеевидный хирургический инструмент содержит удерживаемый рукой конец 1 и сменный инструмент 2. Удерживаемый рукой конец 1 содержит удерживающую конструкцию 11, элемент 14 для запястья и элемент 12 для манипулирования. Удерживающая конструкция 11 имеет проксимальное посадочное место 111 и дистальное посадочное место 113, и элемент 12 для манипулирования соединен с проксимальным посадочным местом 111 удерживающей конструкции 11 посредством элемента 14 для запястья. Сменный инструмент 2 соединен с возможностью отсоединения с дистальным посадочным местом 113. Стерильный пакет 100 имеет кольцевой рукав 110 конца для запястья, основную часть 120 стерильного пакета и кольцевой рукав 130 конца для инструмента, которые соединены последовательно и находятся в сообщении друг с другом. Стерильный пакет 100 обернут с возможностью снятия на наружную поверхность удерживающей конструкции 11, и кольцевой рукав 110 конца для запястья стерильного пакета 100 выполнен с возможностью герметизации соединения между элементом 12 для манипулирования и элементом 14 для запястья, и кольцевой рукав 130 конца для инструмента выполнен с возможностью герметизации соединения между сменным инструментом 2 и удерживаемым рукой концом 1.
[103] Технические признаки в представленных выше вариантах осуществления можно комбинировать в произвольном порядке. Для обеспечения краткости описания в рассмотренных выше вариантах осуществления описаны не все возможные комбинации технических признаков. Тем не менее, пока в комбинации этих технических признаков нет противоречия, все следует считать объемом, описанным в этом описании.
В описанных выше вариантах осуществления только представлены несколько вариантов осуществления настоящего изобретения, и их описание является более конкретным и подробным, но оно не должно толковаться как ограничивающее объем настоящего изобретения. Следует отметить, что для специалистов в данной области техники без отступления от идеи настоящего изобретения могут быть внесены некоторые изменения и улучшения, все из которых попадают в объем правовой охраны настоящего изобретения. Следовательно, объем правовой охраны настоящего изобретения будет определяться прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗМЕЕВИДНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2770729C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ПРЕЖДЕ ВСЕГО ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2011 |
|
RU2506903C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2653625C2 |
| РАЗЪЕМНАЯ КОНСТРУКЦИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2665132C2 |
| ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ | 2014 |
|
RU2677531C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ | 2010 |
|
RU2525740C2 |
| СИЛОВОЙ МОДУЛЬ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2674380C2 |
| ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА И ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НЕЕ | 2018 |
|
RU2740114C1 |
| МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, ПРИВОДИМЫЕ В ДЕЙСТВИЕ ДВИГАТЕЛЕМ, С КОНСТРУКЦИЯМИ ИНДИКАЦИИ СТАТУСА | 2014 |
|
RU2651066C2 |
Группа изобретений относится к медицинской технике, а именно к змеевидному хирургическому инструменту и набору деталей для него. Змеевидный хирургический инструмент содержит удерживаемый рукой конец и сменный инструмент. Удерживаемый рукой конец содержит удерживающую конструкцию, имеющую проксимальное посадочное место и дистальное посадочное место, элемент для запястья и элемент для манипулирования, соединенный с проксимальным посадочным местом удерживающей конструкции посредством элемента для запястья. Элемент для манипулирования соединен с возможностью отсоединения с элементом для запястья. Сменный инструмент соединен с возможностью отсоединения с дистальным посадочным местом. Элемент для запястья расположен на дистальной поверхности проксимального посадочного места, и элемент для запястья соединен с возможностью отсоединения с элементом для манипулирования посредством устройства сопряжения. Устройство сопряжения содержит соединительный штифт, расположенный на проксимальном конце элемента для манипулирования, и полый соединительный вал, расположенный на элементе для запястья и соединен с возможностью отсоединения с соединительным штифтом. Набор деталей для змеевидного хирургического инструмента содержит змеевидный хирургический инструмент и стерильный пакет. Изобретения характеризуются тем, что устройство сопряжения, содержит соединительный штифт, расположенный на проксимальном конце элемента для манипулирования, и полый соединительный вал, расположенный на элементе для запястья и соединенный с возможностью отсоединения с соединительным штифтом, что обеспечивает надежное соединение с возможностью отсоединения между элементом для запястья и элементом для манипулирования. 2 н. и 21 з.п. ф-лы, 27 ил.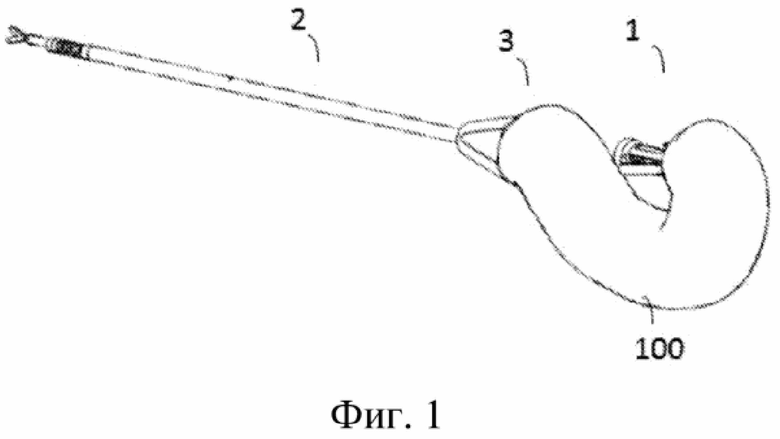
1. Змеевидный хирургический инструмент, содержащий:
удерживаемый рукой конец, содержащий удерживающую конструкцию, имеющую проксимальное посадочное место и дистальное посадочное место, элемент для запястья и элемент для манипулирования, соединенный с проксимальным посадочным местом удерживающей конструкции посредством элемента для запястья, причем элемент для манипулирования соединен с возможностью отсоединения с элементом для запястья; и
сменный инструмент, соединенный с возможностью отсоединения с дистальным посадочным местом,
при этом элемент для запястья расположен на дистальной поверхности проксимального посадочного места, и элемент для запястья соединен с возможностью отсоединения с элементом для манипулирования посредством устройства сопряжения, и
при этом устройство сопряжения содержит соединительный штифт, расположенный на проксимальном конце элемента для манипулирования, и полый соединительный вал, расположенный на элементе для запястья и соединенный с возможностью отсоединения с соединительным штифтом.
2. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что змеевидный хирургический инструмент дополнительно содержит:
стерильный пакет для обертывания с возможностью снятия наружной поверхности удерживающей конструкции, причем стерильный пакет имеет кольцевой рукав конца для запястья, основную часть стерильного пакета и кольцевой рукав конца для инструмента, которые соединены последовательно и находятся в сообщении друг с другом, при этом кольцевой рукав конца для запястья стерильного пакета выполнен с возможностью герметизации соединения между элементом для манипулирования и элементом для запястья, и кольцевой рукав конца для инструмента выполнен с возможностью герметизации соединения между сменным инструментом и удерживаемым рукой концом.
3. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что устройство сопряжения дополнительно содержит осевой ограничивающий элемент, выполненный с возможностью ограничения осевого движения соединительного штифта, и окружной ограничивающий элемент, выполненный с возможностью ограничения вращения по окружности соединительного штифта.
4. Змеевидный хирургический инструмент по п. 3, отличающийся тем, что
окружной ограничивающий элемент содержит соединительный элемент, расположенный на поверхности соединительного штифта и расположенный вдоль осевого направления соединительного штифта, и первый фиксирующий паз, расположенный на внутренней стенке полого соединительного вала и проходящий вдоль осевого направления полого соединительного вала, при этом первый фиксирующий паз выполнен с возможностью взаимодействия с соединительным элементом для ограничения вращения по окружности соединительного штифта, и
осевой ограничивающий элемент содержит второй фиксирующий паз, расположенный на поверхности соединительного штифта и расположенный вдоль направления по окружности, и упругое фиксирующее устройство, расположенное на внутренней стенке полого соединительного вала, при этом упругое фиксирующее устройство взаимодействует со вторым фиксирующим пазом для ограничения осевого движения соединительного штифта.
5. Змеевидный хирургический инструмент по п. 4, отличающийся тем, что упругое фиксирующее устройство содержит по меньшей мере один упругий выступ.
6. Змеевидный хирургический инструмент по п. 1, отличающийся тем, что элемент для манипулирования и соединительный штифт соединены друг с другом посредством подшипника для достижения вращательного движения элемента для манипулирования относительно элемента для запястья.
7. Змеевидный хирургический инструмент по п. 6, отличающийся тем, что
проксимальный конец элемента для манипулирования содержит опору для подшипника, внешнее кольцо подшипника неподвижно присоединено к опоре для подшипника; и
дистальный конец соединительного штифта содержит первый уступ, неподвижно присоединенный к внутреннему кольцу подшипника в радиальном направлении.
8. Змеевидный хирургический инструмент по п. 7, отличающийся тем, что соединительный штифт дополнительно содержит второй уступ, расположенный на дистальном конце первого уступа, второй уступ проходит через опору для подшипника, и паз для вмещения пружинного кольца расположен на дистальной поверхности второго уступа смежно с посадочным местом подшипника.
9. Змеевидный хирургический инструмент по п. 1 или 2, отличающийся тем, что
сменный инструмент содержит змеевидный элемент, опорное гнездо для инструмента и концевой исполнительный элемент, которые соединены последовательно, и змеевидный хирургический инструмент дополнительно содержит:
узел крепления, при этом сменный инструмент соединен с возможностью отсоединения с удерживаемым рукой концом посредством узла крепления, и
передаточное устройство;
при этом элемент для запястья по меньшей мере имеет первую вращательную степень свободы, так что элемент для запястья способен выполнять первое вращательное движение;
змеевидный элемент по меньшей мере имеет пятую вращательную степень свободы, так что змеевидный элемент способен выполнять пятое вращательное движение; и
передаточное устройство выполнено с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения вместе с первым вращательным движением элемента для запястья.
10. Змеевидный хирургический инструмент по п. 9, отличающийся тем, что
элемент для запястья дополнительно имеет вторую вращательную степень свободы, так что элемент для запястья способен выполнять второе вращательное движение;
змеевидный элемент по меньшей мере имеет шестую вращательную степень свободы, так что змеевидный элемент способен выполнять шестое вращательное движение; и
передаточное устройство выполнено с возможностью обеспечения выполнения змеевидным элементом шестого вращательного движения вместе со вторым вращательным движением элемента для запястья.
11. Змеевидный хирургический инструмент по п. 9, отличающийся тем, что узел крепления содержит элемент обеспечения разъемного соединения, при этом элемент обеспечения разъемного соединения содержит:
первый компонент, расположенный на удерживающей конструкции; и
второй компонент, расположенный на сменном инструменте;
при этом первый компонент и второй компонент соединены с возможностью отсоединения и способны синхронно двигаться.
12. Змеевидный хирургический инструмент по п. 11, отличающийся тем, что передаточное устройство содержит:
первую часть, расположенную на удерживаемом рукой конце; и
вторую часть, расположенную на сменном инструменте;
при этом проксимальный конец первой части соединен со змеевидным элементом, дистальный конец первой части соединен с первым компонентом, и первая часть выполнена с возможностью обеспечения движения первого компонента вместе с движением змеевидного элемента, и
проксимальный конец второй части соединен со вторым компонентом, дистальный конец второй части соединен со змеевидным элементом, и вторая часть выполнена с возможностью обеспечения движения змеевидного элемента вместе с движением второго компонента.
13. Змеевидный хирургический инструмент по п. 11, отличающийся тем, что змеевидный хирургический инструмент дополнительно содержит:
приводное устройство, сенсорное устройство и контроллер, которые расположены на удерживающей конструкции;
при этом сенсорное устройство соединено с возможностью осуществления связи с контроллером и выполнено с возможностью обнаружения движения элемента для запястья с получением сигнала движения;
контроллер управляет приводным устройством для обеспечения движения первого компонента согласно сигналу движения, обнаруженному сенсорным устройством; и
передаточное устройство, расположенное в сменном инструменте, выполнено с возможностью соединения второго компонента и змеевидного элемента и выполнено с возможностью обеспечения движения змеевидного элемента вместе с движением второго компонента.
14. Змеевидный хирургический инструмент по п. 13, отличающийся тем, что
элемент для запястья дополнительно имеет вторую вращательную степень свободы, так что элемент для запястья способен выполнять второе вращательное движение,
змеевидный элемент по меньшей мере имеет шестую вращательную степень свободы, так что змеевидный элемент способен выполнять шестое вращательное движение,
первый компонент представляет собой шарнир Гука, расположенный на дистальном посадочном месте удерживающей конструкции, и шарнир Гука имеет девятую вращательную степень свободы и десятую вращательную степень свободы, так что шарнир Гука способен выполнять девятое вращательное движение и десятое вращательное движение соответственно,
сенсорное устройство обнаруживает первое вращательное движение и/или второе вращательное движение элемента для запястья с получением сигнала движения и передает сигнал движения на контроллер;
контроллер управляет приводным устройством для обеспечения выполнения шарниром Гука девятого вращательного движения и/или десятого вращательного движения согласно сигналу движения, переданному сенсорным устройством;
второй компонент представляет собой соединитель, расположенный на сменном инструменте, и шарнир Гука соединен с возможностью отсоединения с соединителем; и
передаточное устройство соединено со змеевидным элементом и соединителем и выполнено с возможностью обеспечения выполнения змеевидным элементом пятого вращательного движения вместе с девятым вращательным движением шарнира Гука и дополнительно выполнено с возможностью обеспечения выполнения змеевидным элементом шестого вращательного движения вместе с десятым вращательным движением шарнира Гука.
15. Змеевидный хирургический инструмент по п. 14, отличающийся тем, что
передаточное устройство содержит первую группу передаточных проволок и вторую группу передаточных проволок, которые расположены на сменном инструменте; и
устройство привода содержит первый электродвигатель и второй электродвигатель, первый электродвигатель выполнен с возможностью обеспечения движения первой группы передаточных проволок, и второй электродвигатель выполнен с возможностью обеспечения движения второй группы передаточных проволок, так что змеевидный элемент движется вместе с движением шарнира Гука.
16. Змеевидный хирургический инструмент по п. 14, отличающийся тем, что узел крепления дополнительно содержит элемент для фиксации защелкиванием, выполненный с возможностью ограничения вращения шарнира Гука и соединителя в направлении по окружности сменного инструмента и/или ограничения движения шарнира Гука и соединителя вдоль осевого направления сменного инструмента.
17. Змеевидный хирургический инструмент по п. 13, отличающийся тем, что
концевой исполнительный элемент содержит по меньшей мере один рабочий конец, соединенный с возможностью вращения с опорным гнездом для инструмента;
удерживаемый рукой конец дополнительно содержит устройство управления открыванием и закрыванием, которое является съемным относительно элемента для манипулирования; и
передача дополнительно содержит первый гибкий передаточный элемент, и устройство управления открыванием и закрыванием управляет вращением рабочего конца посредством первого гибкого передаточного элемента.
18. Змеевидный хирургический инструмент по п. 17, отличающийся тем, что
узел крепления дополнительно содержит первый соединительный вал и первый упругий телескопический штифт, соединенный с возможностью отсоединения с первым соединительным валом, при этом первый соединительный вал проходит в направлении проксимального конца и через второй компонент, а первый упругий телескопический штифт проходит в направлении дистального конца и через первый компонент;
приводное устройство дополнительно содержит третий электродвигатель, и сенсорное устройство дополнительно содержит третий датчик, при этом третий датчик выполнен с возможностью обнаружения движения открывания и закрывания устройства управления открыванием и закрыванием с получением сигнала движения открывания и закрывания, и контроллер выполнен с возможностью управления выходной мощностью третьего электродвигателя согласно сигналу движения открывания и закрывания, обнаруженному третьим датчиком; и
третий электродвигатель выполнен с возможностью приведения в действие первого гибкого передаточного элемента посредством первого упругого телескопического штифта и первого соединительного вала.
19. Змеевидный хирургический инструмент по п. 13, отличающийся тем, что
элемент для манипулирования выполнен с возможностью вращения вокруг своей оси относительно элемента для запястья;
опорное гнездо для инструмента выполнено с возможностью вращения вокруг своей оси относительно змеевидных сочленений; и
передаточное устройство дополнительно содержит второй гибкий передаточный элемент, при этом второй гибкий передаточный элемент выполнен с возможностью передачи вращательного движения элемента для манипулирования на опорное гнездо для инструмента с вращением опорного гнезда для инструмента.
20. Змеевидный хирургический инструмент по п. 17, отличающийся тем, что
узел крепления дополнительно содержит второй соединительный вал и второй упругий телескопический штифт, соединенный с возможностью отсоединения со вторым соединительным валом, при этом второй соединительный вал проходит в направлении дистального конца и через второй компонент, а второй упругий телескопический штифт проходит в направлении проксимального конца и через первый компонент; и
приводное устройство дополнительно содержит четвертый электродвигатель, сенсорное устройство дополнительно содержит четвертый датчик, при этом четвертый датчик выполнен с возможностью обнаружения вращательного движения элемента для манипулирования с получением сигнала вращательного движения, контроллер управляет выходной мощностью четвертого электродвигателя согласно сигналу вращательного движения, обнаруженному четвертым датчиком, и четвертый электродвигатель выполнен с возможностью приведения в действие второго гибкого передаточного элемента посредством второго упругого телескопического штифта и второго соединительного вала.
21. Змеевидный хирургический инструмент по п. 2, отличающийся тем, что
кольцевой рукав конца для запястья плотно прилегает к наружной части соединения между элементом для манипулирования и элементом для запястья посредством упругой восстанавливающей силы; и
кольцевой рукав конца для инструмента плотно прилегает к наружной части соединения между сменным инструментом и удерживаемым рукой концом посредством упругой восстанавливающей силы.
22. Змеевидный хирургический инструмент по п. 2, отличающийся тем, что основная часть стерильного пакета присоединена при помощи клея к кольцевому рукаву конца для запястья, и основная часть стерильного пакета присоединена при помощи клея к кольцевому рукаву конца для инструмента.
23. Набор деталей для змеевидного хирургического инструмента, содержащий
змеевидный хирургический инструмент, содержащий:
удерживаемый рукой конец, содержащий удерживающую конструкцию, элемент для запястья и элемент для манипулирования, при этом удерживающая конструкция имеет проксимальное посадочное место и дистальное посадочное место, и элемент для манипулирования соединен с проксимальным посадочным местом удерживающей конструкции посредством элемента для запястья;
сменный инструмент, соединенный с возможностью отсоединения с дистальным посадочным местом; и
стерильный пакет, имеющий кольцевой рукав конца для запястья, основную часть стерильного пакета и кольцевой рукав конца для инструмента, которые соединены последовательно и находятся в сообщении друг с другом, при этом стерильный пакет обернут с возможностью снятия на наружную поверхность удерживающей конструкции, и кольцевой рукав конца для запястья стерильного пакета выполнен с возможностью герметизации соединения между элементом для манипулирования и элементом для запястья, и кольцевой рукав конца для инструмента выполнен с возможностью герметизации соединения между сменным инструментом и удерживаемым рукой концом,
при этом элемент для запястья расположен на дистальной поверхности проксимального посадочного места, и элемент для запястья соединен с возможностью отсоединения с элементом для манипулирования посредством устройства сопряжения, и
при этом устройство сопряжения содержит соединительный штифт, расположенный на проксимальном конце элемента для манипулирования, и полый соединительный вал, расположенный на элементе для запястья и соединенный с возможностью отсоединения с соединительным штифтом.
| CN 108013906 А, 11.05.2018 | |||
| CN 104490429 А, 08.04.2015 | |||
| CN 102892374 А, 23.01.2013 | |||
| US 2014299647 A1, 09.10.2014. |

