Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в точном землепользовании и природообустройстве.
Известен полевой бесконтактный профилограф содержащий массивное основание со стержнями для фиксации на поверхности почвы (Патент РФ №2707907 «Полевой бесконтактный профилограф для спиралевидного сканирования»), на которое устанавливается стержень, в верхней части которого крепится уровень, угловой датчик и с помощью подшипника перпендикулярно закреплено подвижное плечо с противовесом с одной стороны и лазерным датчиком положения с другой стороны, установленного с помощью винтового механизма с кареткой, что позволяет изменять начальное положение лазерного датчика в радиальном направлении, причем в нижней части стержня установлен двигатель, передающий крутящий момент через цилиндрическую и коническую передачу, для перемещения каретки и вращения подвижного плеча, а в верхней части стержня установлен электронный блок обработки сигналов, который подсоединен кабелями к датчикам и с помощью USB-кабеля к ноутбуку.
Недостатком известного бесконтактного профилографа является, то, что сканирование выполняется только по окружности или спирали Архимеда с заданным и постоянным шагом, отсутствует конструктивная возможность измерять параметры поверхности по всей исследуемой площади и задавать различную траекторию перемещения лазерного датчика над поверхностью.
Известен мехатронный профилограф, состоящий из массивного основания, уровня, углового датчика, электронного блока, ноутбука, подвижного плеча с противовесом, лазерного датчика положения, винтового механизма с кареткой, электродвигателей, цилиндрической передачи (Патент РФ №2724386. Мехатронный профилограф / С.А. Васильев, Р.И. Александров, А.А. Федорова, М.А. Васильев, С.А. Мишин, С.Е. Лимонов - Опубл. 23.06.2020, Бюл. №18.). К признакам аналога изобретения, которые совпадают с существенными признаками изобретения, можно отнести основание, стойку, угловой датчик, корпус, блок питания, блок управления, опорное колесо, сателлит, полевой ноутбук, лазерный датчик, винт, электродвигатели.
Недостатком известного мехатронного профилографа является то, что реализовать процесс профилирования поверхности при таком его конструктивном исполнении, выполняя большое количество оборотов, технологически сложно вследствие использования различных кабелей, соединяющих между собой электронный блок обработки сигналов, датчики, электродвигатели, ноутбук, дополнительное применение противовеса повышает массу устройства.
Наиболее близким (прототипом заявленного изобретения) является известное устройство - полевой мехатронный профилограф, содержащий основание с установочными стержнями и стойкой, на который установлены угловой датчик и подвижный корпус, внутри которого размещены источник питания и блок управления, неподвижное опорное колесо и взаимодействующий с ним сателлит, лазерный датчик положения, установленный на направляющей с возможностью горизонтального и кругового движения, два электродвигателя, ноутбук, оснащенный программой информационной системы измерения и компьютерного управления для согласованной работы электродвигателей, приборов и датчиков, при этом электродвигатели соединены с блоком управления, который с помощью BIuetoth-соединения связан с ноутбуком.. (Федорова А.А., Васильев С.А., Иванов И.Н. Анализ профилографа для определения геометрический характеристик изделий спиральным сканированием лазерным профилографом Вестник современных технологий. - 2020. - №2 (18). - С. 27-32).
Недостатком известного мехатронного профилографа является то, что визуальная установка прибора по гидравлическому уровню снижает точность, эту информацию сложно перевести в цифровые данные, особенно в процессе профилирования, причем, размещая профилограф в полевых условиях, не возможно установить его геопозицию - координаты профилографа с использованием спутниковых радионавигационных систем ГЛОНАСС или GPS, в тоже время необходимо определять природно-климатические параметры и метеорологические условия измерения, описывающие состояние окружающей среды и воздействующие на размер измеряемых величин и в итоге на результат измерения.
Согласно ГОСТ 20915-2011 «Испытания сельскохозяйственной техники. Методы определения условий испытаний» к определяемым показателям метеорологических условий относятся температура и влажность воздуха, которые влияют на результат измерения, а точность учета этих факторов влияет на точность конечного результата. Также не маловажно определять данные параметры для самой почвы, так как они определяют полевые условия измерения и описывают совокупность побочных физических явлений, влияющих на полевой мехатронный профилограф и результат измерений. В связи с этим задачей является создание полевого профилографа, который обеспечивает высокую точность измерений при учете влияния совокупности побочных физических явлений и метеорологических условия.
Технический результат - повышение точности и достоверности измерения параметров поверхности по всей исследуемой площадки, природно-климатических параметров окружающей среды в полевых условиях на склоновых землях за счет расширения функциональных возможностей устройства с учетом влияния совокупности побочных физических явлений и метеорологических условия.
Технический результат достигается тем, что полевой мехатронный профилограф содержит основание, стойку, угловой датчик, корпус, блок питания, блок управления, опорное колесо, сателлит, полевой ноутбук, лазерный датчик, винт, электродвигатели, причем корпус установлен на стойке с помощью подшипников качения, для привода вращения которого используется неподвижное опорное колесо, сателлит и двигатель, расположенный на подвижном корпусе, а для точного задания в процессе исследования горизонтальной поверхности в которой перемещается лазерный датчик дополнительно размещены акселерометр и гироскоп, для установления координат геопозиции профилограф оснащен приемником GPS и ориентирования на местности - компасом, причем для измерения природно-климатических параметров, определяющих полевые условия, в нижней части профилографа установлены термогигрометр окружающего воздуха и влагомер почвы.
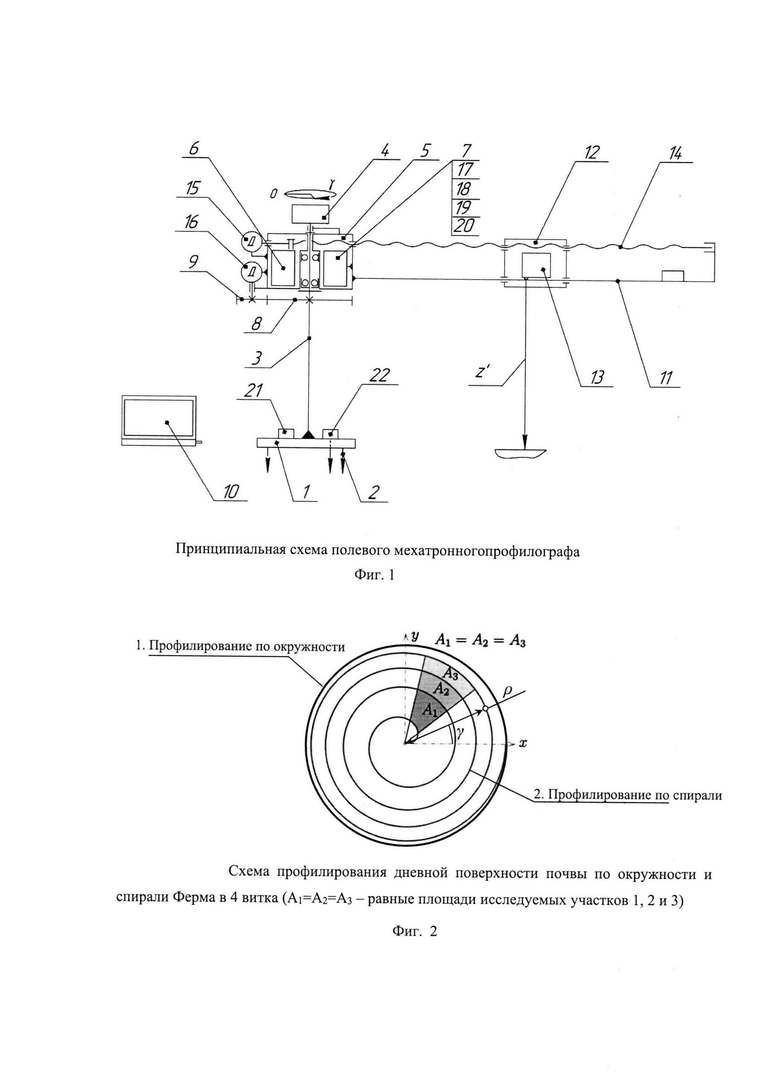
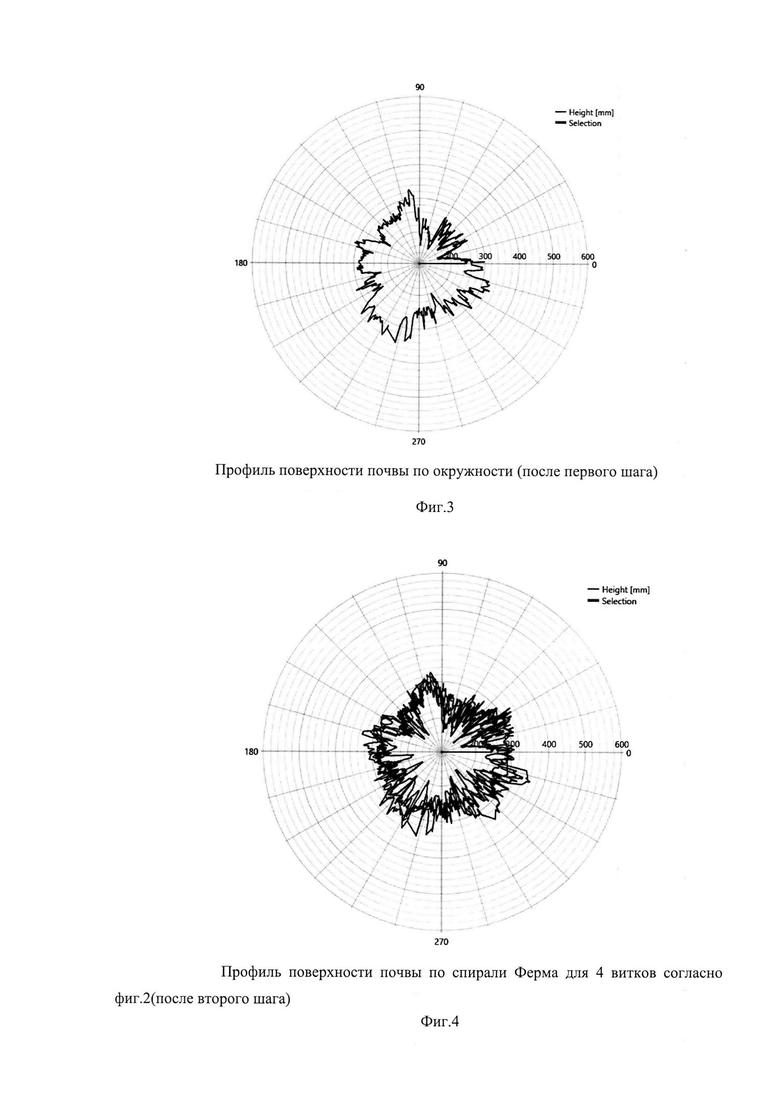
На фиг. 1 приведена принципиальная схема полевого мехатронного профилографа. Схема профилирования дневной поверхности почвы по окружности и по спирали Ферма, которая представляет собой плоскую кривую - траекторию точки, равномерно движущейся вдоль радиус-вектора с началом в О, изображена на фиг. 2. На фиг. 3 представлен профиль поверхности почвы по окружности (после первого шага). На фиг. 4 получен профиль поверхности почвы по спирали Ферма для 4 витков согласно фиг. 2 (после второго шага).
Полевой мехатронный профилограф состоит из основания 1 с установочными стержнями 2, стойки 3, на которой установлены угловой датчик 4, с помощью подшипников качения корпус 5 с размещенными в нем блоком питания 6 и блоком управления 7, неподвижное опорное колесо 8, взаимодействующий с ним сателлит 9, полевой ноутбук 10, оснащенный информационной системой измерения и компьютерным управлением для согласованной работы электродвигателей 15 и 16 в процессе измерения, а также программой приема и обработки, показателей датчиком и приборов, направляющей 11, каретки 12, лазерного датчика положения 13, винта 14, электродвигателей 15 и 16, приемника GPS 17, акселерометра 18, гироскопа 19, компаса 20, термогигрометра окружающего воздуха 21 и влагомера почвы 22. Корпус 5 установлен на стойке с помощью подшипников качения, для привода вращения которого используется неподвижное опорной колесо 8, сателлит 9 и двигатель 16, расположенный на подвижном корпусе 5. Связь полевого ноутбука 10 с блоком управления 7, датчиками 4, 13, электродвигателями 15, 16, приемником GPS 17 и измерительными приборами 18, 19, 20, 21, 22 обеспечивается через Bluetooth-соединение при помощи Bluetooth-радиомодулей, встроенных в лазерный датчик 13, блок управления 7 и ноутбук 10.
Таким образом, для реализации профилирования поверхности используют мехатронную систему измерения, состоящую из полевого мехатронного профилографа, оснащенного информационной системой измерения.
Устройство функционирует следующим образом.
При профилировании почвы в полевых условиях вначале размещают полевой мехатронный профилограф на дневную поверхность. Для точного определения горизонтальной поверхности, в которой перемещается лазерный датчик 13, например недорогие компактные лазерные датчики серии РФ-605, в процессе исследования, используют акселерометр 18 и гироскоп 19. Акселерометр 18 и гироскоп 19 устройства, которые частично дублируют, дополняя друг друга, повышают точность получаемых данных. Гироскоп 19 служит для отслеживания положения лазерного датчика 13 в пространстве путем определения собственного угла наклона относительно земной поверхности. Акселерометр 18 в состоянии покоя, позволяет вычислить угол наклона относительно вектора силы тяготения земли. На экране монитора отображается отклонение поверхности вращения лазерного датчика 13 от уровня в цифровом виде в двух перпендикулярных направлениях. Для корректирования горизонтального положения отклоняют стойку, добиваясь нулевых отклонений от горизонтали в продольном и поперечном направлении. Для этого используют, например MPU6050, который представляет собой 3-х осевой гироскоп и 3-х же осевой акселерометр в одном корпусе.
Координаты геопозиции профилографа на склоновых землях определяют с помощью приемника GPS 17, например, можно использовать GPS приемник GY-NE06MV2. Применение приемника GPS 17 позволяет привязать получаемые точные данные о профиле просканированной площадки на склоновых землях к координатам электронной карты в процессе исследования. Приемник GPS 17 измеряет задержку распространения сигнала от спутника до него. Из полученного сигнала приемник GPS 17 получает данные о местонахождении спутника. Для определения расстояния от спутника до приемника задержка сигнала умножают на скорость света. В систему GPS входит 24 искусственных спутника Земли, сеть наземных станций слежения и навигационные приемники. Итоговая точность измерения достигает 1…5 метров.
Для ориентирования на местности и установления начального положения лазерного датчика по азимуту, относительно географической северной стороны, используют компас 20. Определение азимута позволяет реализовать последовательное определение параметров поверхности на исследуемых площадках с одинаковой точкой отсчета и природно-климатических параметров окружающей среды на склоновых землях. Термогигрометр окружающего воздуха 21 и влагомер почвы 22, установленные в нижней части профилографа, измеряют природно-климатические параметры, определяющие полевые условия. Влагомер почвы 22 имеет щуп, который заглубляется вместе с установочными стержнями 2 в почву. Вначале определяют профиль дневной поверхности почвы по окружности (см. фиг. 2, первый шаг), ограничивающей измеряемую площадку, заявляемым профилографом, оснащенным информационной системой. Для этого запускают программу на ноутбуке и включают профилограф. Опираясь на информацию от компаса 20, определение азимута позволяет реализовать последовательное определение параметров поверхности на исследуемых площадках с одинаковой точкой отсчета и природно-климатических параметров окружающей среды на склоновых землях, датчики 4 и 13 профилографа устанавливают в исходные положения. Через блок управления 7 верхний двигатель 15, перемещает с помощью винта 14 на периферию измеряемой площадки лазерный датчик положения 13 по направляющей 11, а нижний двигатель 16 через блок управления 7, поворачивает на необходимый угол направляющую 11 до северного направления, перекатывая сателлит 9 по неподвижному опорному колесу 8. Далее программа с ноутбука 10 запускает только нижний двигатель 16, сканируется поверхность почвы по периферии площадки. С помощью Bluetooth-соединения информация с датчика 13 с радиомодулем Bluetooth передается на радиомодуль Bluetooth блока управления 7 и далее в ноутбук 10, где также имеется встроенный модуль Bluetooth. Компьютерная программа по полученной информации изображает построение профиля по окружности в полярных координатах по двум параметрам: расстояние между датчиком положения 13 и поверхностью почвы, а также соответствующий этому положению угол поворота от нулевой отметки по угловому датчику 4 (см. фиг. 3). Информационная система измерения - это совокупность функционально - объединенных измерительных (датчики 4, 13), контрольных (контроль и сравнение с моделями различных профилей), диагностических (акселерометр 18, гироскоп 19), вычислительных (ноутбук 10), управляющих (ноутбук 10, двигатели 15, 16), регистрирующих (ноутбук 10, приемник GPS 17), отображающих (ноутбук 10), телекоммуникационных (ноутбук 10) и других вспомогательных технических средств, сформированная для получения измерительной информации, ее преобразования и обработки, передачи измерительной информации по назначению. Она формирует по признакам, характеризующим свойства профилей поверхностей (наклон, кривизну, волнистость, шероховатость), решение о принадлежности распознаваемого профиля к той или иной модели (гладкая, шероховатая или волнистая поверхность). Причем для каждой модели применяется соответствующая спираль или кривая измерения дневной поверхности почвы, установленная предварительно и экспериментально. Например, на фиг. 2 представлена схема профилирования дневной поверхности почвы последовательно, сначала первый шаг выполняется по окружности и второй шаг - по спирали Ферма, которая представляет собой плоскую кривую - траекторию точки, равномерно движущейся вдоль радиус-вектора с началом в О. Траектория движения датчика 13 по параболической спирали Ферма обеспечивает оптимальный охват площади участков заданным количеством точек замера, которые равномерно распределяются по всей исследуемой площади. Например, площадь участка между первым и вторым витками A1 будет равна площади участка между вторым и третьим витками А2, равна площади участка между третьим и четвертым витками А3 и т.д.
Информационная система измерения обеспечивает взаимосвязь элементов конструкции: диагностические средства (акселерометр 18, гироскоп 19), регистрирующие средства (ноутбук 10, приемник GPS 17).
Далее определяют профиль дневной поверхности почвы по этой спирали или кривой, перемещая лазерный датчик положения 13 от нулевой отметки и далее по заданной траектории (см. фиг. 2, второй шаг). Для этого при подаче сигнала от ноутбука 10, через блок управления 7, начинают работать два двигателя 15 и 16, которые с помощью приводов, перемещают датчик положения 13 по направляющей 11, которая в свою очередь с корпусом 5 поворачивается по опорному колесу 8. Информационная система измерения позволяет представить информацию в полярных координатах по 2-м параметрам для заданной спирали: расстояние между датчиком положения 13 и поверхностью почвы, а также соответствующий этому положению угол поворота от нулевой отметки по угловому датчику 4. Рассматривая двумерную систему координат, в которой каждая точка на плоскости определяется двумя числами - полярным углом - угол поворота по угловому датчику 4 и полярным радиусом - это расстояние от датчика положения 13 до поверхности почвы. Определенная таким образом радиальная координата может принимать значения от минимального до максимального значения, в нашем случае при применении датчиков РФ-605 - от 150 мм до 500 мм, а угловая координата изменяется в пределах от 0° до 360°. Эта система координат в нашем случае удобна, так как отношения между точками проще изобразить в виде радиусов и углов.
Вследствие того, что информация с датчика 13 передается с каждого витка спирали, то может происходить наложение кривых в полярных координатах.
Полученную информацию представляют при известном полярном уравнении спирали, заложенном в информационную систему измерения, например, для спирали Ферма
где ρ - радиус-вектор, м, а - коэффициент спирали, γ - угол положения радиус-вектора от нулевой отметки в градусах.
Для перевода в декартовую систему координат, используют уравнения
где х - продольная координата, м; у - поперечная координата, м; z - вертикальная координата - высота неровностей дневной поверхности почвы на заданной точке, м.
Для определения высоты неровностей дневной поверхности почвы на заданной точке используют выражение

где zmax - максимальное расстояние между датчиком положения и поверхностью почвы, м; z' - действительное расстояние между датчиком положения и поверхностью почвы на заданной точке, м.
Пример реализации. Исследования проводили на пашне в Моргаушском районе ЧР. После первого шага полевой профилограф выполнил сканирование по окружности (см. фиг. 2), информационно-измерительная система позволила получить информацию и построить ее виде профиля поверхности почвы по окружности в полярных координатах по двум параметрам (фиг. 3). Далее задали траекторию движения датчика по спирали Ферма до 4 витков. После второго шага полевой профилограф выполнил сканирование по спирали Ферма, траектория перемещения лазерного датчика 13 представляет собой плоскую кривую, а информационно-измерительная система позволила получить информацию и построить ее виде профиля поверхности почвы по спирали Ферма для 4 витков в полярных координатах по двум параметрам (фиг. 4).
| название | год | авторы | номер документа |
|---|---|---|---|
| Мехатронный профилограф | 2020 |
|
RU2724386C1 |
| Полевой бесконтактный профилограф для спиралевидного сканирования | 2019 |
|
RU2707907C1 |
| Способ профилирования дневной поверхности почвы на элементарной площадке в полевых условиях | 2017 |
|
RU2680608C1 |
| Устройство поиска источника сброса загрязняющих веществ при мониторинге поверхностных водных объектов | 2023 |
|
RU2795185C1 |
| Устройство поиска источника сброса загрязняющих веществ при мониторинге водных объектов | 2021 |
|
RU2778289C1 |
| Способ контроля качества обработки почвы на агроландшафтах в полевых условиях | 2020 |
|
RU2741746C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ОТМЕТОК ДОННОЙ И ВОДНОЙ ПОВЕРХНОСТИ ПРИ МОНИТОРИНГЕ ВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2694702C1 |
| Способ мониторинга агрофизических показателей плодородия почвы в полевых условиях | 2023 |
|
RU2830298C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| БАРРАЖИРУЮЩИЙ БОЕПРИПАС | 2023 |
|
RU2821739C1 |
Изобретение относится к устройствам для профилирования почвы в полевых условиях. Сущность: полевой мехатронный профилограф содержит основание (1) с установочными стержнями (2) и стойкой (3). На стойке (3) установлены угловой датчик (4), подвижный корпус (5), неподвижное опорное колесо (8) с взаимодействующим с ним сателлитом (9). Корпус (5) установлен на стойке (3) с помощью подшипников качения. Внутри корпуса (5) размещены источник питания (6), блок (7) управления, приемник (17) GPS, компас (20), акселерометр (18) и гироскоп (19), а снаружи – два электродвигателя (15, 16) и направляющая (11). На направляющей (11) установлен лазерный датчик (13) положения с возможностью горизонтального и кругового движения. Блок (7) управления соединен с электродвигателями (15, 16) и с ноутбуком (10), оснащенным программой информационной системы измерения и компьютерного управления для согласованной работы электродвигателей, приборов и датчиков. На основании (1) установлены термогигрометр (21) окружающего воздуха и влагомер (22) почвы. Технический результат: повышение точности измерения параметров поверхности почвы. 4 ил.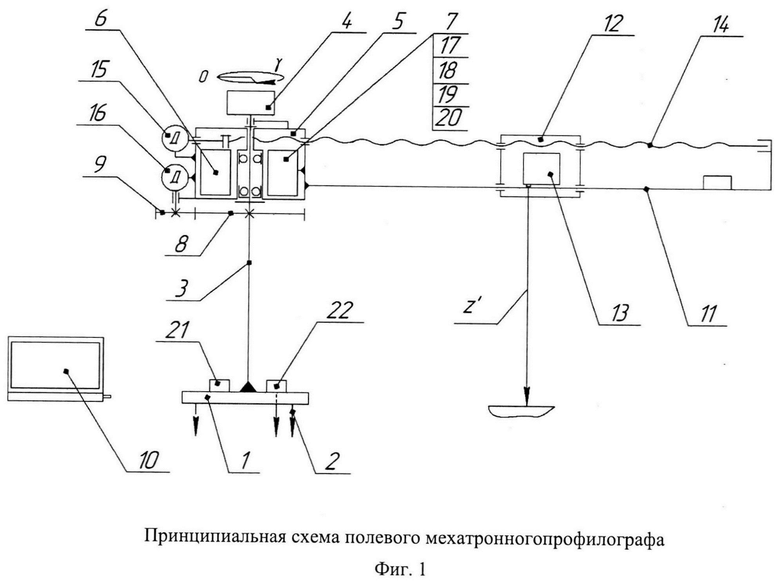
Полевой мехатронный профилограф, содержащий основание с установочными стержнями и стойкой, на которой установлен угловой датчик и подвижный корпус, внутри которого размещены источник питания и блок управления; неподвижное опорное колесо и взаимодействующий с ним стеллит, лазерный датчик положения, установленный на направляющей с возможностью горизонтального и кругового движения, два электродвигателя, соединенные блоком управления, который с помощью Bluetooth-соединения связан с ноутбуком, оснащенным программой информационной системы измерения и компьютерного управления для согласованной работы электродвигателей приборов и датчиков, отличающийся тем, что электродвигатели установлены на корпусе, корпус установлен на стойке с помощью подшипников качения, профилограф оснащен приемником GPS, компасом, установленными в одном корпусе акселерометром и гироскопом и установленными в нижней части профилографа термогигрометром окружающего воздуха и влагомером почвы.
| А.А | |||
| Федорова и др | |||
| Анализ профилографа для определения геометрических характеристик изделий спиральным сканированием лазерным профилографом / Вестник современных технологий, 2020, N2 (18), стр.27-32 | |||
| Мехатронный профилограф | 2020 |
|
RU2724386C1 |
| Полевой бесконтактный профилограф для спиралевидного сканирования | 2019 |
|
RU2707907C1 |

