Изобретение относится к гидрометрии и гидрологии и может быть использовано при мониторинге береговой полосы водных объектов: водоемов, водохранилищ, рек или их частей в целях наблюдения за состоянием, режимами использования и морфометрическими изменениями объектов.
Известен патент RU №2632342, МПК G01С 5/00, опубл. 04.10.2017, г. на изобретение «Автономный мобильный робототехнический комплекс (АМРК)», предназначенный для мониторинга прибрежной зоны и прогнозирования морских природных катастроф. Комплекс содержит транспортное средство, включающее герметичный корпус и надстройку, силовую и трансмиссионную установки, движитель, аппаратную часть и блок управления комплексом, при этом аппаратная часть включает в себя приборы мониторинга окружающей среды, навигационное оборудование и приборы контроля проходимости грунтовой поверхности, размещенные на надстройке транспортного средства.
Недостатком изобретения является невозможность выполнения промеров глубин (профилирования) водоемов для составления топографического плана береговой полосы.
Известна система определения отметок свободной поверхности реки (см. патент РФ №2234056, МПК G01С 5/00, опубл. 5.07.2004), содержащая высотную сеть в виде реперов и два теодолита, установленные на плавучем средстве. Определение отметок донной и водной поверхности объекта ведется с плавучего средства тригонометрическим нивелированием. Замеры осуществляет бригада специалистов. Стационарность точки замера обеспечивается остановкой плавучего средства. При этом для повышения точности определения отметки свободной поверхности воды, она определяется путем визирования на все видимые репера
Недостатками известной системы являются большие трудозатраты, как на замеры, так и на обработку полученных результатов, осуществляемых вручную, и необходимость перевода полученных результатов в цифровой формат для использования в современной информационной среде.
Известна система определения донной и водной поверхности по патенту РФ на полезную модель №104304, МПК G01C 5/00, опубл. 10.05.2011, в которой замеры параметров осуществляются в режиме «on-line», а обработка полученных результатов - с использованием современных информационных технологий. Указанный аналог по назначению и технической сущности наиболее близок к заявляемому изобретению и выбран его прототипом.
Прототип содержит плавучее средство, высотную сеть в виде спутниковой системы навигации (GNSS), устройство определения отметок дна в виде гидролокатора, блок ввода погрешности для определения отметок водной поверхности и ЭВМ, осуществляющую обработку, хранение и передачу полученных результатов.
Недостатком системы является недостаточное количество измеряемых параметров для полного мониторинга водного объекта, в частности в системе отсутствует возможность определения планово-высотного положения береговой линии и заиленности водоема.
Заявляемое изобретение позволяет увеличить ряд измеряемых параметров, за счет возможности определения планово-высотного положения береговой линии водного объекта с точной привязкой к географическим координатам, что позволяет проводить более полный мониторинг водного объекта. Изобретение также позволяет повысить точность определения измеряемых параметров при качке плавучего средства, а также - осуществлять измерение высоты донных осадков (заиленности) на дне исследуемого водоема.
Для решения указанной проблемы используется следующая совокупность существенных признаков: система определения отметок донной и водной поверхности водных объектов, (содержащая также как и прототип, высотную сеть в виде спутниковой системы навигации и плавучее средство с установленными на нем антенной приемника спутниковой системы навигации, устройством определения отметок дна и соединенной с ними ЭВМ), в отличие от прототипа дополнительно снабжена размещенным на палубе плавучего средства устройством определения расстояния до береговой линии, соединенным с ЭВМ и выполненным в виде лазерного дальномера и камеры технического зрения. Кроме того, система дополнительно содержит устройство измерения крена и дифферента плавучего средства, соединенным с ЭВМ и выполненным в виде гироскопа, акселерометра и магнитного компаса. Кроме того, в системе устройство определения отметок дна выполнено в виде параметрического профилографа.
Сущность изобретения заключается в синхронизированных по времени измерениях параметров, характеризующих состояние, режим использования и морфометрические изменения водных объектов, а, именно: состояния и расположения береговой линии, профиля дна, высоты уровня воды, глубины водного объекта и заиленности дна, с привязкой их к государственной нивелирной сети или к Балтийской системе высот 1977 г. Указанный результат достигается за счет использования измерительного комплекса, обеспечивающего определение текущего географического положения плавучего средства (судна) и его курса, высокоточные и оперативные измерения определяемых параметров дна, а также ведущего фото, видео и геодезическую съемку береговой черты. При этом бортовая ЭВМ наряду с обработкой данных о географических координатах судна и параметров водного объекта дополнительно обеспечивает непрерывную обработку видеоряда береговой линии.
Сопоставление предлагаемой системы и прототипа показало, что поставленная задача - увеличение ряда измеряемых параметров, за счет возможности определения планово-высотного положения береговой линии водного объекта - решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
Вместе с тем, проведенный информационный поиск в области гидрометрии и гидрологии, не выявил решений, содержащих отдельные отличительные признаки изобретения, что позволяет сделать вывод о соответствии заявляемой системы критерию «изобретательский уровень».
Сущность предлагаемой системы поясняется графическими материалами (фиг. 1).
Система определения отметок донной и водной поверхности водных объектов выполнена в следующем составе: малое судно 1 (плавучее средство) на мачте которого установлена антенна 2 GNSS-приемника. На палубе судна 1 установлены камера технического зрения 3, направленная в сторону берега, и лазерный дальномер 4, представляющий собой прибор для измерения расстояния с применением лазерного луча. С помощью приборов 3 и 4 ведется измерение расстояния до береговой линии и видеосъемка объекта. На борту судна закреплен параметрический профилограф 5, представляющий собой гидроакустическое устройство, предназначенное для исследования структуры дна. С помощью прибора 5 ведется измерение глубины водоема и высоты донных осадков. Для измерения крена и дифферента корпуса судна 1 на его палубе установлены гироскоп 6, микроэлектромеханический акселерометр 7 и магнитный компас 8. Бортовая ЭВМ 9 осуществляет обработку видеоряда береговой линии, снятого камерой 3, данных параметрического профилографа 5 и лазерного дальномера 4, а также спутникового позиционирования с учетом мгновенно измеренного крена и дифферента корпуса судна.
Система работает следующим образом.
С борта судна 1, движущегося по заданному маршруту и ориентирующегося по антенне 2 GNSS-приемника, магнитному компасу 8, акселерометру 7 и гироскопу 6 (образующих вместе систему высокоточной навигации и измерения крена и дифферента корпуса судна), осуществляется измерение расстояния до береговой линии (уреза воды). (Спутниковая система навигации (GNSS) определяет координаты антенны 2 приемника GNSS и соответственно географическое положение судна с привязкой измеряемых параметров к государственной нивелирной сети или к Балтийской системе высот 1977 г.) Одновременно ведется видеосъемка береговой линии камерой технического зрения 3 высокого разрешения. Бортовая ЭВМ 9 осуществляет непрерывную обработку видеоряда береговой линии с видимой подсветкой от лазерного дальномера 4, корректируя при этом расстояние, измеренное лазерным дальномером 4, за счет исключения измерений, которые имеют отклонения подсветки дальномера от уреза вода при качке судна 1 в заданном диапазоне. Синхронно профилографом 5 определяется глубина водоема и высота донных осадков. Вся полученная информация накапливается и обрабатывается в ЭВМ и далее поступает на хранение в базы данных, или в ситуационные центры для использования в оперативном управлении, или на печать соответствующего графического материала.
Предлагаемое техническое решение позволяет повысить оперативность и точность получения данных об уровне воды, глубине водоема, заиленности дна и положении береговой линии на водных объектах, с точной привязкой к географическим координатам. Система дает хороший результат при морфометрическом мониторинге состояния береговой черты, т.к. в ней реализуется возможность синхронизации нескольких видов данных с возможностью их сравнения во временном периоде и автоматизированной обработки для составления точного топографического профиля, как подводной, так и надводной частей береговой линии.
Предлагаемое изобретение было создано специалистами кафедры «Основ инженерного проектирования» ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательской работы совместно с ООО «3Д спутниковая навигация», ООО «Фарватер» и ЗАО «НПК «ПРОМЭЛЕКТРОНИКА». Были произведены расчеты, моделирование и испытания макетов устройств, показавшие возможность использования заявляемой системы для выполнения морфометрического мониторинга водных объектов.
Изложенное, позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство поиска источника сброса загрязняющих веществ при мониторинге водных объектов | 2021 |
|
RU2778289C1 |
| Устройство поиска источника сброса загрязняющих веществ при мониторинге поверхностных водных объектов | 2023 |
|
RU2795185C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Способ прогнозирования изменения глубины и рельефа дна водохранилищ | 2018 |
|
RU2681249C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |

Изобретение относится к гидрометрии и гидрологии, используется при мониторинге береговой полосы водных объектов. Система содержит высотную сеть в виде спутниковой системы навигации, антенну приемника спутниковой системы навигации, устройство определения отметок дна в виде параметрического профилографа. Система дополнительно снабжена устройством определения расстояния до береговой линии, камерой технического зрения, устройством измерения крена и дифферента плавучего средства в виде гироскопа, акселерометра и магнитного компаса. Устройство определения отметок дна, устройство определения расстояния до береговой линии, камера технического зрения и устройство измерения крена и дифферента синхронизированы по времени измерений параметров с помощью ЭВМ. Увеличивается ряд измеряемых параметров за счет возможности определения планово-высотного положения береговой линии водного объекта с точной привязкой к географическим координатам. Проводится более полный мониторинг надводной и подводной частей береговой полосы. 2 з.п. ф-лы, 1 ил.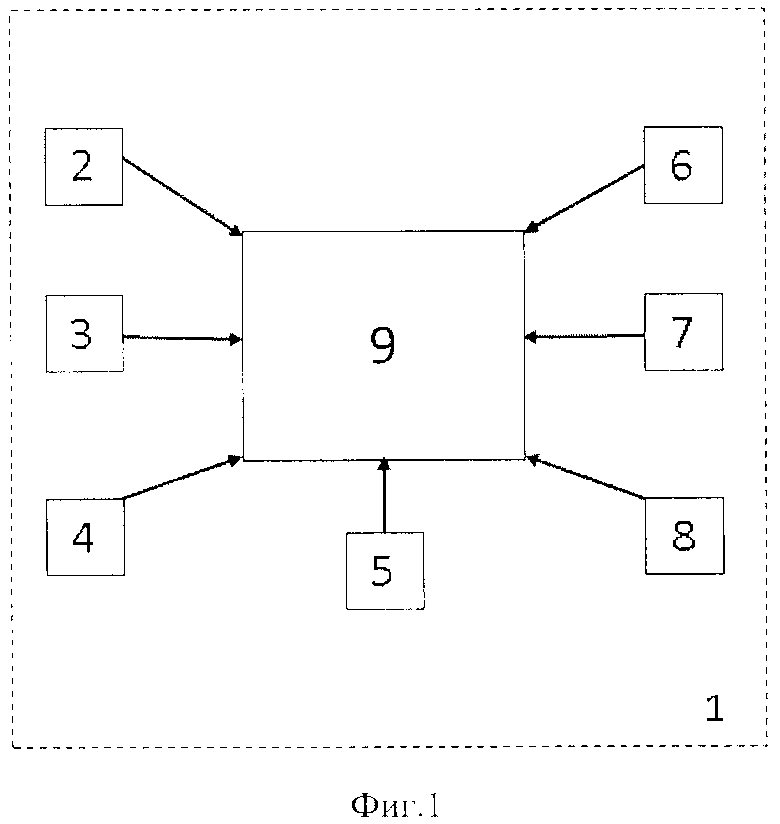
1. Система определения отметок донной и водной поверхности при мониторинге водных объектов, содержащая высотную сеть в виде спутниковой системы навигации и выполненные с возможностью установки на плавучем средстве антенну приемника спутниковой системы навигации и устройство определения отметок дна, и соединенную с ними ЭВМ, отличающаяся тем, что дополнительно снабжена устройством определения расстояния до береговой линии, камерой технического зрения, устройством измерения крена и дифферента плавучего средства, соединенными с ЭВМ, выполненными с возможностью установки на палубе плавучего средства, при этом устройство определения отметок дна, устройство определения расстояния до береговой линии, камера технического зрения и устройство измерения крена и дифферента синхронизированы по времени измерений параметров с помощью ЭВМ.
2. Система по п. 1, отличающаяся тем, что устройство измерения крена и дифферента плавучего средства выполнено в виде гироскопа, акселерометра и магнитного компаса.
3. Система по п. 1 или 2, отличающаяся тем, что устройство определения отметок дна выполнено в виде параметрического профилографа.
| Способ изготовления мумий мелких птиц | 1955 |
|
SU104304A1 |
| 0 |
|
SU162717A1 | |
| Универсальный трубогибочный станок | 1949 |
|
SU90192A1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2352480C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТМЕТОК СВОБОДНОЙ ПОВЕРХНОСТИ РЕКИ | 2002 |
|
RU2234056C2 |

