Изобретение относится к приборостроению и может быть использовано в различных отраслях народного хозяйства, в том числе цифровом земледелии, почвоведении и природообустройстве.
Известен бесконтактный профилограф [1], состоящий из массивного основания со стержнями для фиксации на поверхности почвы, на которое с помощью подшипника устанавливается ось, в нижней части которой крепится энкодер - угловой датчик, а в верхней части перпендикулярно закреплено подвижное плечо. На одной стороне подвижного плеча располагается противовес, а на другой - лазерный датчик положения, установленный с помощью стержня, что позволяет изменять начальное положение лазерного датчика по вертикали. В верхней части оси установлен электронный блок обработки сигналов, который подсоединен с помощью USB-кабеля к ноутбуку. На оси также крепится уровень.
Недостатком известного бесконтактного профилографа является, то, что сканирование выполняется только по окружности и отсутствует конструктивная возможность измерять параметры дневной поверхности почвы по всей исследуемой площади экспериментальной площадки в полевых условиях.
Известен полевой бесконтактный профилограф, содержащий массивное основание со стержнями для фиксации на поверхности почвы [2], на которое устанавливается стержень, в верхней части которого крепится уровень, угловой датчик и с помощью подшипника перпендикулярно закреплено подвижное плечо с противовесом с одной стороны и лазерным датчиком положения с другой стороны, установленного с помощью винтового механизма с кареткой, что позволяет изменять начальное положение лазерного датчика в радиальном направлении, причем в нижней части стержня установлен двигатель, передающий крутящий момент через цилиндрическую и коническую передачу, для перемещения каретки и вращения подвижного плеча, а в верхней части стержня установлен электронный блок обработки сигналов, который подсоединен кабелями к датчикам и с помощью USB-кабеля к ноутбуку.
Недостатком известного бесконтактного профилографа является то, что сканирование выполняется только по окружности или спирали Архимеда с заданным и постоянным шагом, отсутствует конструктивная возможность измерять параметры поверхности по всей исследуемой площади и задавать различную траекторию перемещения лазерного датчика над поверхностью.
Техническим результатом является повышение достоверности измерения параметров поверхности по всей исследуемой площади за счет расширения функциональных возможностей устройства.
Технический результат достигается тем, что мехатронный профилограф содержит массивное основание, на которое устанавливается стержень, в верхней части которого крепится уровень, угловой датчик и с помощью подшипника перпендикулярно закреплено подвижное плечо с противовесом с одной стороны и лазерным датчиком положения с другой стороны, установленного с помощью винтового механизма с кареткой и электродвигателя, что позволяет изменять начальное положение лазерного датчика в радиальном направлении, причем в нижней части стержня установлен электродвигатель, передающий крутящий момент через цилиндрическую передачу, для вращения подвижного плеча, а в верхней части стержня установлен электронный блок обработки сигналов, который подсоединен кабелями к датчикам, электродвигателям и ноутбуку, оснащенному информационной системой измерения и компьютерным управлением для согласованной работы электродвигателей в процессе измерения.
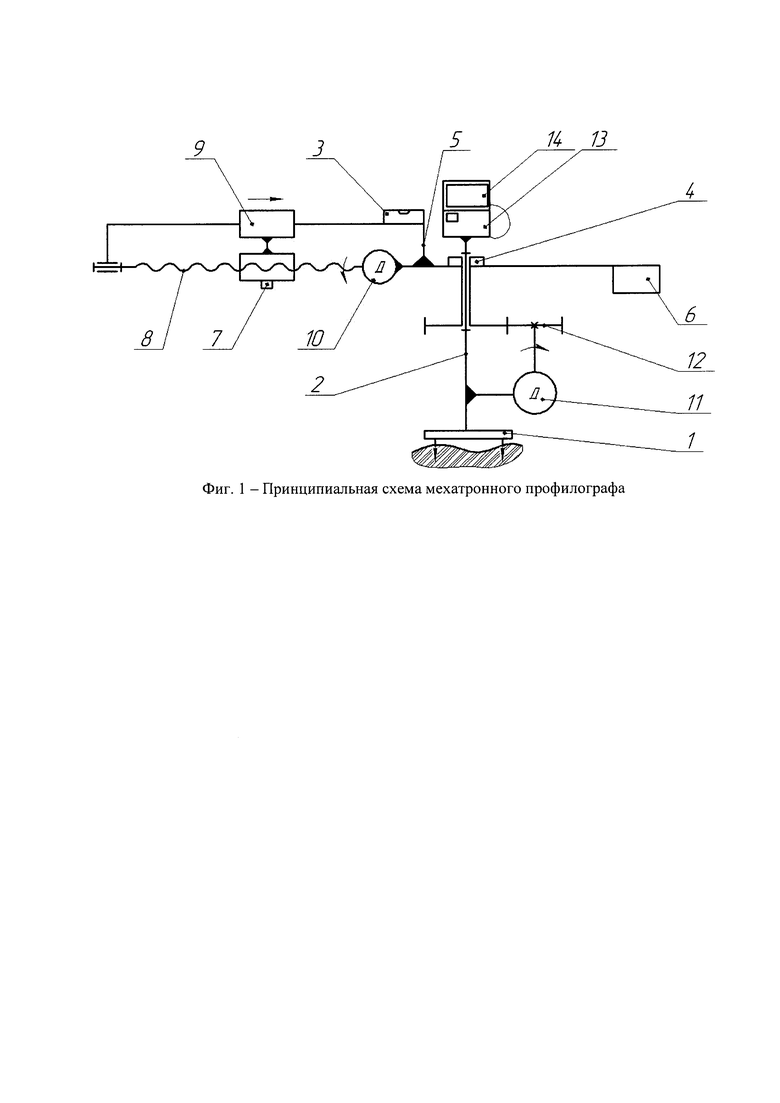
На фиг. 1 приведена принципиальная схема мехатронного профилографа.
Устройство состоит из массивного основания 1 для фиксации на поверхности почвы, на которое устанавливается стержень 2, в верхней части которого крепится уровень 3, угловой датчик 4 и с помощью подшипника перпендикулярно закреплено подвижное плечо 5 с противовесом 6 с одной стороны и лазерным датчиком положения 7 с другой стороны, установленного с помощью винтового механизма 8 с кареткой 9 и электродвигателя 10, что позволяет изменять начальное положение лазерного датчика в радиальном направлении, причем в нижней части стержня 2 установлен электродвигатель 11, передающий крутящий момент через цилиндрическую передачу 12, для вращения подвижного плеча 5, а в верхней части стержня установлен электронный блок обработки сигналов 13, который подсоединен кабелями к датчикам 4 и 7, электродвигателям 10 и 11, ноутбуку 14, оснащенному информационной системой измерения и компьютерным управлением для согласованной работы электродвигателей 10 и 11 в процессе измерения.
Устройство функционирует следующим образом.
Предварительно мехатронный профилограф устанавливается в центре исследуемого участка строго вертикально по уровню 3 во всех направлениях, перемещая плечо 5 по окружности. Каретка 9 с лазерным датчиком 7 должна располагаться на периферии исследуемого участка в исходном положении. Электрическое питание для датчиков угла, положения и электродвигателей подается от ноутбука 14.
Запускается компьютерная программа на ноутбуке 14, информационная система измерения и компьютерное управление. Включается электродвигатель 11, передающий крутящий момент через цилиндрическую передачу 12, который медленно вращает подвижное плечо 5 вокруг стержня 2. Выполняя один оборот лазерный датчик положения 7 сканирует поверхность почвы по окружности на периферии исследуемого участка и передает информацию через электронный блок 13 в ноутбук 14.
В ноутбуке 14 информация о профиле анализируется информационной системой измерения и задается компьютерным управлением, соответствующая задачам исследования, траектория перемещения лазерного датчика 7 над поверхностью исследуемой площади, например, по траектории в виде параболической спирали. Так компьютерное управление согласовано задействует электродвигатели 10 и 11, передающие крутящий момент для медленного перемещения в радиальном направлении каретки 9 и лазерного датчика 7 с помощью винтового механизма 8 и вращения подвижного плеча 5 вокруг основания 1 через цилиндрическую передачу 12.
Угловой датчик 4 замеряет положение подвижного плеча 5 относительно основания 1. В основе работы лазерного датчика 7 используется принцип оптической триангуляции. С датчиков 4 и 7 мгновенные значения величин расстояния и угла поворота пересылается через электронный блок обработки сигналов 13 на ноутбук 14. Компьютерная программа позволяет представить информацию в полярных координатах для 2-х параметров: расстояние между датчиком положения и поверхностью почвы, а также соответствующий этому положению угол поворота от нулевой отметки. В ноутбуке 14 информация о профиле анализируется информационной системой измерения и строится профиль поверхности исследуемой площади.
Устройство является мехатронным, поскольку относится к классу машин, базирующихся на использовании в них точной механики, электропривода, электроники, компьютерного управления, отмеченных в описании изобретения.
Источники, принятые во внимание в заявке
1. Васильев, С.А. Разработка методов и технических средств контроля противоэрозионных технологий на склоновых агроландшафтах: дисс. докт. техн. наук: 06.01.02 / Васильев Сергей Анатольевич; [Место защиты: Рос. гос. аграр. ун-т]. - Чебоксары, 2016. - 345 с.
2. Патент РФ №2707907. Полевой бесконтактный профилограф для спиралевидного сканирования / Васильев С.А., Федорова А. А., Александров Р.И. - опубл. 02.12.2019, Бюл. №34.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полевой мехатронный профилограф | 2021 |
|
RU2770800C1 |
| Полевой бесконтактный профилограф для спиралевидного сканирования | 2019 |
|
RU2707907C1 |
| Способ профилирования дневной поверхности почвы на элементарной площадке в полевых условиях | 2017 |
|
RU2680608C1 |
| Способ контроля качества обработки почвы на агроландшафтах в полевых условиях | 2020 |
|
RU2741746C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СРЕДНЕГО УКЛОНА ЭЛЕМЕНТАРНОЙ ПЛОЩАДКИ В ПОЛЕВЫХ УСЛОВИЯХ И ПРОФИЛОГРАФ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2560752C2 |
| Мехатронный модуль для поворота рулевого вала транспортно-технологического средства | 2022 |
|
RU2796264C1 |
| Способ мониторинга агрофизических показателей плодородия почвы в полевых условиях | 2023 |
|
RU2830298C1 |
| Мехатронный модуль воздействия на педаль управления транспортно-технологического средства | 2022 |
|
RU2792709C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
Изобретение относится к сельскохозяйственному приборостроению. Мехатронный профилограф содержит массивное основание, уровень, угловой датчик, электронный блок, ноутбук, подвижное плечо с противовесом, лазерный датчик положения, винтовой механизм с кареткой, электродвигатель с цилиндрической передачей. Для вращения винтового механизма, обеспечивающего перемещение каретки с лазерным датчиком в радиальном направлении, дополнительно установлен электродвигатель. Электронный блок обработки сигналов подсоединен кабелями к датчикам, электродвигателям и ноутбуку, оснащенному информационной системой измерения и компьютерным управлением для согласованной работы электродвигателей в процессе измерения. Обеспечивается повышение достоверности измерения параметров поверхности по всей исследуемой площади за счет расширения функциональных возможностей устройства. 1 ил.
Мехатронный профилограф, содержащий массивное основание, уровень, угловой датчик, электронный блок, ноутбук, подвижное плечо с противовесом, лазерный датчик положения, винтовой механизм с кареткой, электродвигатель с цилиндрической передачей, отличающийся тем, что для вращения винтового механизма, обеспечивающего перемещение каретки с лазерным датчиком в радиальном направлении, дополнительно установлен электродвигатель, причем электронный блок обработки сигналов подсоединен кабелями к датчикам, электродвигателям и ноутбуку, оснащенному информационной системой измерения и компьютерным управлением для согласованной работы электродвигателей в процессе измерения.
| Полевой бесконтактный профилограф для спиралевидного сканирования | 2019 |
|
RU2707907C1 |
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| KR 100975277 B1, 17.08.2010 | |||
| CN 106297197 A, 04.01.2017 | |||
| WO 2018061255 A1, 05.04.2018. | |||

