Изобретение относится к области оптической локации и вооружению и может быть использовано в неконтактных оптических взрывателях, использующих оптическое излучение для обнаружения и определения заданного расстояния до цели для определения оптимального момента инициирования зарядов.
В настоящее время известны различные способы неконтактного подрыва заряда, реализуемые в неконтактных датчиках цели.
Известен оптический блок (патент РФ №2151372, МПК F42C 13/02, опубл. 20.06.2000, бюл. № 17), состоящий из источника оптического излучения, установленного в фокальной плоскости коллимирующей линзы, системы светоделения, установленной между коллимирующей линзой и защитным стеклом, фокусирующей линзы, фотоприемника и светофильтра, установленного между фокусирующей линзой и фотоприемниками.
Данный оптический блок реализует способ неконтактного подрыва заряда, заключающийся в формировании оптического излучения, его коллимации, разделении сколлимированного излучения на два пучка, имеющих заданное угловое рассогласование и формирующих два сектора зондирования пространства, приеме, при наличии цели на дистанции срабатывания датчика, отраженного от цели излучения, его спектральной фильтрации, фокусировке и регистрации пространственно разнесенными фотоприемниками, имеющими развернутые по углу приемные диаграммы чувствительности, и формировании сигнала на подрыв при превышении зарегистрированными сигналами порогового значения
Недостатками известного способа являются:
- низкая вероятность обнаружения малоразмерных целей из-за наличия значительной мертвой зоны в пространстве между узкими лучами оптического излучения;
- низкая точность срабатывания вследствие того, что заданная дальность срабатывания обеспечивается только за счет юстировки осей диаграмм направленности зондирующих пучков источников излучения и соответствующих диаграмм чувствительности фотоприемников, при этом не учитывается значительный разброс отражающих свойств поверхности целей
Известен оптический датчик цели (патент РФ 2498205, МПК F42C 13/02, опубл. 10.11.2013, бюл. № 31).
Данный оптический датчик цели реализует способ неконтактного подрыва заряда, заключающийся в формировании n зондирующих оптических пучков излучения, зондировании каждым из данными пучков заданного сектора пространства, формировании n фотоприемными каналами n угловых зон чувствительности, приеме при наличии цели отраженного от цели излучения, его регистрации фотоприемным каналом, анализе принятого сигнала на соответствие величины t - временного интервала, отсчитываемого с момента излучения зондирующих оптических пучков до момента регистрации сигнала, заданной временной установке T=2R/c, где c - скорость света, R - требуемая дистанция детектирования цели, и выдаче сигнала идентификации цели и сигнала на подрыв при выполнении условия t=T с заданной точностью, причем оси диаграмм направленности зондирующих оптических пучков излучения и угловых зон чувствительности фотоприемных каналов направлены под углом φ<90° к продольной оси боеприпаса по направлению движения и расположены с угловым смешением друг относительно друга, n>2π/(α+b/R), где α - угол расходимости зондирующего оптического пучка, b - минимальный размер цели, R - требуемая дистанция детектирования цели
Недостатком известного способа являются низкая вероятность обнаружения малогабаритных целей на курсах сближения, близких к встречным при осевом промахе меньше величины (R-b1), где b1 – поперечный размер цели. В этом случае величина временного интервала t будет заведомо меньше Т и требуемое условие выработки сигнала подрыва не будет выполнено. Как результат - низкая надежность срабатывания взрывателя по целям такого типа. Кроме этого, данный способ имеет недостаточную защищенность от оптических помех, вызванную тем, что формирование сигнала идентификации цели происходит по однократному выполнению условия t=T.
Наиболее близким по технической сущности аналогом является способ неконтактного подрыва заряда (патент РФ №2442956 МКИ F42C 13/02, опубл. 20.02.2012, бюл. № 5).
Известный способ заключается в периодическом зондировании пространства установленной серией световых импульсов, обнаружении цели путем регистрации отраженного излучения фотоприемником и анализа регистрируемых сигналов, формировании тестового временного окна через временной интервал t0, определяющий дистанцию подрыва R, отсчитываемый с момента излучения конечного светового импульса установленной серии, формировании импульса подрыва после регистрации излучения при условии регистрации отраженных сигналов для всех N излученных световых импульсов текущей серии и при условии регистрации конечного отраженного сигнала серии в тестовом временном окне, причем излучение зондирующих световых импульсов осуществляют одним излучателем, регистрацию отраженного излучения - одним фотоприемником, длительность тестового временного окна задает погрешность определения дистанции подрыва δR.
К недостаткам известного решения следует отнести низкую точность срабатывания что обусловлено следующим:
1. Высокая чувствительность к пропуску отраженного сигнала в серии излучаемых зондирующих сигналов.
Вероятность пропуска цели M при длине серии N импульсов в известном способе составляет (1-pN), где p – вероятность обнаружения цели в каждом из импульсов серии. При заданном значении p =0,99 для серии длиной N =8 импульсов M = 0,077.
2. Низкая точность срабатывания известного способа обусловлена тем, что в текущем цикле зондирования для последовательных k-ого и k+1-ого зондирующих импульсов возможно сближение с целью на расстояние, меньшее требуемой заданной дальности R, т.е. Rk+1 < R < Rk. В этом случае возможен пропуск цели из-за непопадания отраженного сигнала в тестовое временное окно длительностью 2δR/с, т.к. за промежуток времени между последовательными циклами зондирования ТЗ расстояние до цели может оказаться меньше R – δR и отраженный от цели сигнал не попадет в тестовое временное окно.
3. Использование одного фотоприемника при широком поле обзора приводит к низкой помехозащищенности вследствие увеличения фонового сигнала, вызванного внешними фоновыми источниками и помехой обратного рассеяния, что приводит к снижению отношения сигнал/помеха.
Задачей изобретения является повышение точности срабатывания.
Технический результат заключается в повышении точности вероятности подрыва за счет расширения зоны обнаружения цели вследствие реализации кольцевой зоны обзора при формировании конической диаграммы направленности излучения с большим углом раскрыва, повышении точности формирования сигнала дистанционного подрыва за счет повышении вероятности обнаружения цели в условиях наличия помехи обратного рассеяния и возможности определения направления на объект
Поставленная задача достигается тем, что в способе неконтактного подрыва, заключающемся
- в периодическом зондировании пространства серией световых импульсов,
- обнаружении цели путем регистрации отраженного излучения фотоприемником и анализа регистрируемых сигналов,
- формировании импульса подрыва при регистрации N отраженных сигналов, причем регистрацию отраженных от цели сигналов осуществляют в временных окнах, излучение зондирующих световых импульсов, осуществляют одним излучателем,
- формируют последовательность временных окон синхронно с серией световых импульсов,
- регистрацию отраженного излучения осуществляют многоэлементным квадрантным фотоприемником,
- после регистрации в текущем временном окне отраженного от цели оптического излучения формируют первый и второй разностные сигналы посредством вычитания сигналов, зарегистрированных диагональными центрально симметричными относительно оптической оси элементами фотоприемника,
- обнаружение цели осуществляют при превышении как минимум одним из зарегистрированных сигналов первого порога и как минимум одним из разностных сигналов второго порога,
- определяют направление на цель посредством анализа величин и знаков первого и второго разностных сигналов,
- причем зондирование пространства осуществляют оптическим излучением с диаграммой направленности в виде полой конической поверхности с углом раскрыва 2α, ось которой совпадает с осью носителя,
- отраженное оптическое излучение регистрируют вне плоскости фокусировки,
- временные окна открывают, начиная с момента излучения светового импульса, на временной интервал, превышающий максимальную дистанцию подрыва,
- выбирают частоту следования световых импульсов в серии F>VCN/LЦ, где VC - скорость полета носителя, LЦ – минимальный характерный размер цели,
- временной интервал между сериями излучающих импульсов устанавливают меньше, чем 1/F, а длительность серии устанавливают много больше величины N/F.
Известен неконтактный датчик цели, по патенту РФ№ 2496096, МКИ F42C 13/02, опубл. 20.10.2013, бюл. №39, содержащий два и более приемоизлучающих канала, каждый из которых содержит электронный блок, импульсный источник оптического излучения и фотоприемник, соединенные с электронным блоком, при этом оптические оси импульсного источника оптического излучения и фотоприемника, образующие приемоизлучающий канал, направлены под углом ≤90° к продольной оси боеприпаса по направлению движения и расположены со смещением относительно друг друга, причем расстояние между оптическими осями излучателя и фотоприемника выбрано из условия l>(du+dп)/2, где du и dп - наибольшие диаметры излучателя и фотоприемника соответственно, при этом указанные приемоизлучающие каналы размещены вокруг продольной оси боеприпаса, причем угол между излучателями смежных приемоизлучающих каналов в радиальном направлении выбран таким образом, что световые пучки излучателей не пересекаются между собой, при этом расстояние между лучами соседних излучающих каналов на требуемой дистанции детектирования цели равно/примерно равно минимальному размеру цели, а необходимое количество излучателей в оптическом блоке определено из соотношения n>2π/(α+b/R), где n - количество излучателей, α - угол расхождения пучка излучения, b - минимальный размер цели, R - требуемая дистанция детектирования цели.
Недостатками известного устройства являются:
- низкая точность, обусловленная возможностью пропуска малоразмерных целей при курсах сближения, близких к встречным (из-за высоких энергетических потерь при попадании целей в «слепые» зоны размером b при остаточном промахе, близком к требуемой дистанции детектирования цели R,
- низкая помехозащищенность, обусловленная значительным фоновым сигналом вследствие отсутствия спектральной селекции и временного стробирования
- значительные габариты, обусловленные необходимостью конструктивного разноса большого количества источников излучения и фотоприемников, размещаемых в поперечном сечении боеприпаса.
Известно устройство лазерной локации заданной области пространства (патент РФ 2516376, МКИ G01S 17/02, опубл. 20.05.2014, Бюл. №14), реализующее неконтактный датчик цели. Данное устройство является наиболее близким аналогом к предполагаемому изобретению.
Известное устройство содержит блок управления, передающую оптическую систему с полем излучения, составленную из n идентичных пар перпендикулярно скрещенных цилиндрических линз с совпадающими главными оптическими осями и фокальными плоскостями, а также из n импульсных лазерных источников света, установленных в совпадающих фокальных плоскостях соответствующих пар цилиндрических линз, соединенных с выходами блока управления, приемную оптическую систему, выполненную в виде цилиндрической линзы, в фокальной плоскости которой установлены последовательно светофильтр и фотоприемник, выход которого подключен ко входу блока управления, выпуклое коническое зеркало, размещенное перед передающей и принимающей оптическими системами, при этом главная оптическая ось приемной оптической системы совпадает с осью симметрии выпуклого конического зеркала и параллельна главным оптическим осям пар цилиндрических линз передающей оптической системы, расположенным равномерно по окружности, а зона чувствительности образована пересечением поля излучения передающей оптической системы и поля зрения приемной оптической системы. Известное устройство лазерной локации заданной области пространства также содержит светофильтр, пропускающий свет с длиной волны излучения импульсных лазерных источников света, установленный перед фотоприемником.
Недостатками известного устройства являются:
- низкая точность, обусловленная низкой чувствительностью вследствие существенных потерь излучения, отраженного от цели, при отражении от выпуклого конического зеркала (для внеосевых составляющих отраженного сигнала) и малой апертурой приемной оптической системы, конструктивно ограниченной приосевой областью поперечного сечения устройства;
- низкая помехозащищеность, обусловленная наличием помехи обратного рассеяния на длине волны оптического излучения и существенным телесным полем зрения фотоприемного канала 0.25π β2, в пределах которого фотоприемник собирает фоновое излучение на длине волны оптического излучения;
- конструктивная сложность, обусловленная необходимостью размещения n передающих каналов в корпусе устройства и их юстировкой.
Задачей предлагаемого изобретения является повышение точности срабатывания неконтактного датчика цели.
Технический результат заключается в повышении вероятности обнаружения цели за счет увеличения зоны обзора при формирования конической диаграммы направленности излучения, повышении точности формирования сигнала дистанционного подрыва за счет повышении вероятности обнаружения цели и сужения поля зрения приемного канала, уменьшающей влияние помехи обратного рассеяния. Кроме того, помеха обратного рассеяния компенсируется при разностной обработке зарегистрированных сигналов от диаметрально противоположных элементов многоплощадочного квадрантного фотоприемника.
Поставленная задача достигается тем, что в неконтактный датчик цели, включающий
- блок управления,
-аксикон,
- передающую систему, содержащую последовательно установленные на ее оптической оси две цилиндрических линзы с совпадающими фокальными плоскостями и импульсный лазерный источник света,
- приемную систему, содержащую последовательно установленные на ее оптической оси объектив, узкополосный светофильтр и фотоприемник,
-причем оптические оси передающей и приемной систем параллельны,
- первый выход блока управления подключен ко входу импульсного лазерного источника света,
- вход блока управления подключен к выходу фотоприемника,
- второй выход блока управления соединен с исполнительным устройством,
- дополнительно введены
- коллимирующий объектив, установленный на оптической оси передающей системы между импульсным лазерным источником света и первой цилиндрической линзой,
- отражатель в виде усеченного конуса, установленный на оптической оси приемной оптической системы,
- причем ось симметрии аксикона совпадает с оптической осью передающей системы,
- фотоприемник выполнен четырехплощадочным и установлен вне фокальной плоскости объектива с центром фоточувствительной области на оптической оси приемной системы,
- а образующие цилиндрических линз являются параллельными.
Узкополосный светофильтр выполнен
- из двух концентрических зон:
- центральной круговой, в пределах которой нанесено покрытие, не пропускающее излучение в диапазоне спектральной чувствительности фотоприемника,
и смежной с ней кольцевой, в пределах которой нанесен узкополосный интерференционный фильтр с максимумом пропускания на длине волны излучения импульсного лазерного источника света.
- отражатель в виде усеченного конуса выполнен полым и установлен между объективом и светофильтром.
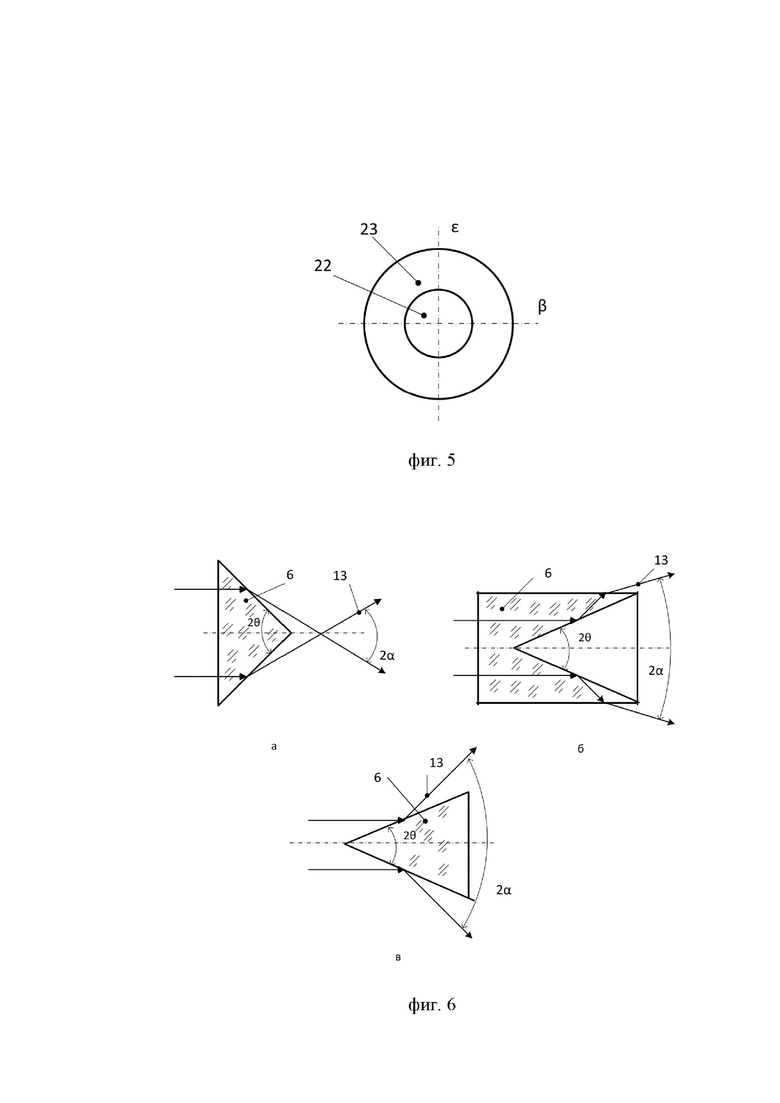
- аксикон выполнен в виде преломляющего конуса, вершина которого направлена по направлению распространения излучения импульсного лазерного источника света, угол при вершине аксикона 2θ определен из решения относительно α уравнения
α=arcsin[ncos(θ)]+θ-90,
где ° n - показатель преломления материала конуса;
- либо аксикон выполнен в виде преломляющего цилиндра, выполненного из оптически прозрачного материала, с осесимметричной конической выемкой, вершина которой выставлена против направления распространения излучения импульсного лазерного источника, ось цилиндра совпадает с оптической осью передающего канала, а угол раскрыва конической выемки равен arccos(cosα/n), где ° n - показатель преломления материала цилиндра;
- либо аксикон выполнен в виде осесимметричного отражающего конуса, вершина конуса выставлена против направления распространения излучения импульсного лазерного источника света, а угол раскрыва конуса равен α;
Сущность изобретения поясняется чертежами, на которых изображено:
на фиг. 1 – блок-схема неконтактного датчика цели;
на фиг. 2 – вариант исполнения отражателя приемной системы неконтактного датчика цели;
на фиг. 3 – угловое поле зрения приемного канала и диаграмма направленности излучения;
на фиг. 4 – положение пучков излучения, отраженного от цели, на фоточувствительной области фотоприемника для различного расположения цели;
на фиг. 5 – вид интерференционного светофильтра;
на фиг. 6 – варианты исполнения первого аксикона;
на фиг. 7 – временные диаграммы работы.
Неконтактный оптический датчик цели (фиг. 1) содержит передающую систему 1 и приемную систему 2.
Передающая система 1 содержит последовательно установленные на первой оптической оси импульсный лазерный источник света 3, коллимирующий объектив 4, две цилиндрических линзы 5 с совпадающими фокальными плоскостями, аксикон 6.
Приемная система 2 содержит последовательно установленные на второй оптической оси, параллельной первой, отражатель 7 в виде усеченного конуса, объектив 8, узкополосный светофильтр 9 и установленный вне фокальной плоскости объектива с центром фоточувствительной области на оптической оси четырехплощадочный фотоприемник 10, блок управления 11, первый выход которого подключен ко входу импульсного лазерного источника света, вход блока управления подключен к выходу фотоприемника, исполнительное устройство 12, вход которого соединен с вторым выходом блока управления, пучок лазерного излучения 13 , подсвечивающего объект, пучок лазерного излучения 14 , отраженный от цели.
Неконтактный датчик цели (фиг. 2) содержит отражатель 7, выполненный в виде полого усеченного конуса, и размещен между объективом 8 и светофильтром 9.
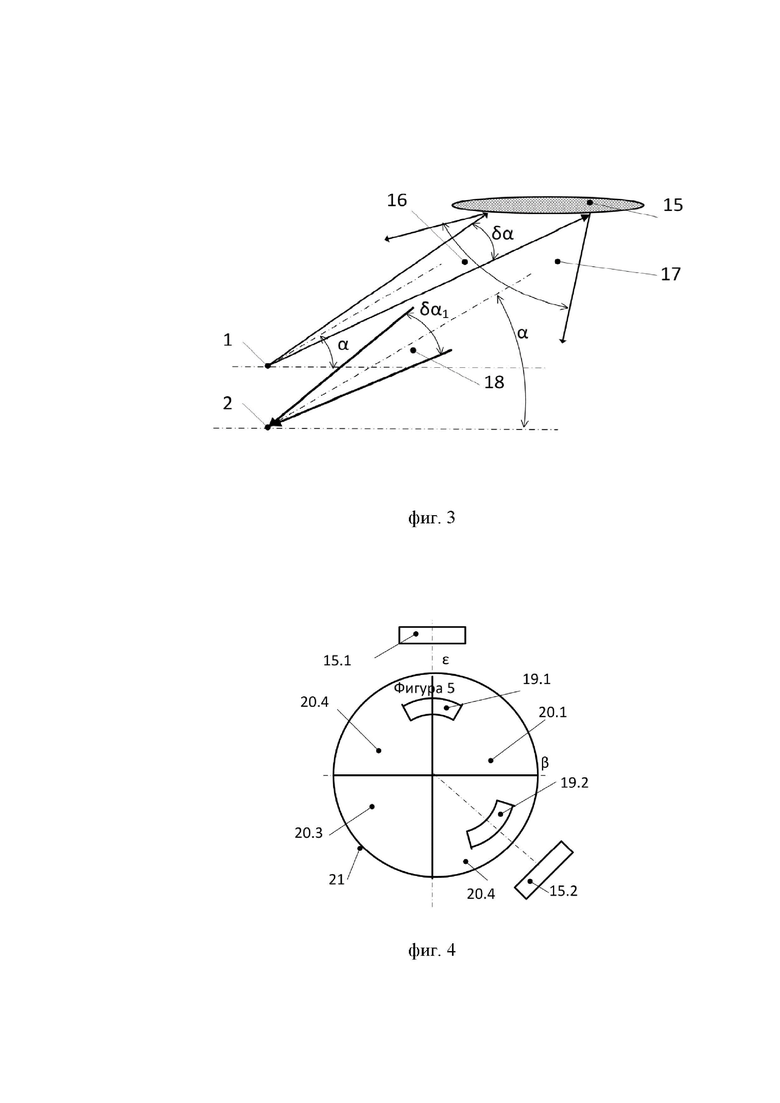
Неконтактный датчик цели (фиг. 3) имеет взаимным угловым расположением цели 15, оптических осей приемного канала 2 и передающего канала 1, диаграммы направленности 16 излучения передающей системы, диаграммы направленности 17 рассеянного объектом излучения и поля зрения 18 приемной системы.
Неконтактный датчик цели (фиг. 4) имеет пространственным положением сформированных приемным объективом 8 на фоточувствительной области фотоприемника 10 пучков 19.1 и 19.2 излучения, отраженного от цели при различных положениях цели 15.1 и 15.2 относительно осей системы координат, связанной с неконтактным датчиком цели. Оси координат β и ε соответствуют горизонтальному и вертикальному направлениям. Фотоприемник 10 содержит четыре (20.1 – 20.4) элементарных фоточувствительных площадки, составляющих фоточувствительную область 21 фотоприемника.
Одним из возможных вариантов исполнения узкополосного светофильтра 9 (фиг. 5), является его выполнение в виде фильтра, содержащего две концентрические зоны: центральную круговую 22, в пределах которой нанесено покрытие, не пропускающее излучение в диапазоне спектральной чувствительности фотоприемника, и смежную с ней кольцевую 23, в пределах которой нанесен узкополосный интерференционный фильтр с максимумом пропускания на длине волны излучения импульсного лазерного источника света.
Варианты исполнения аксикона в виде преломляющего и отражающего конусов приведены на фиг. 6.
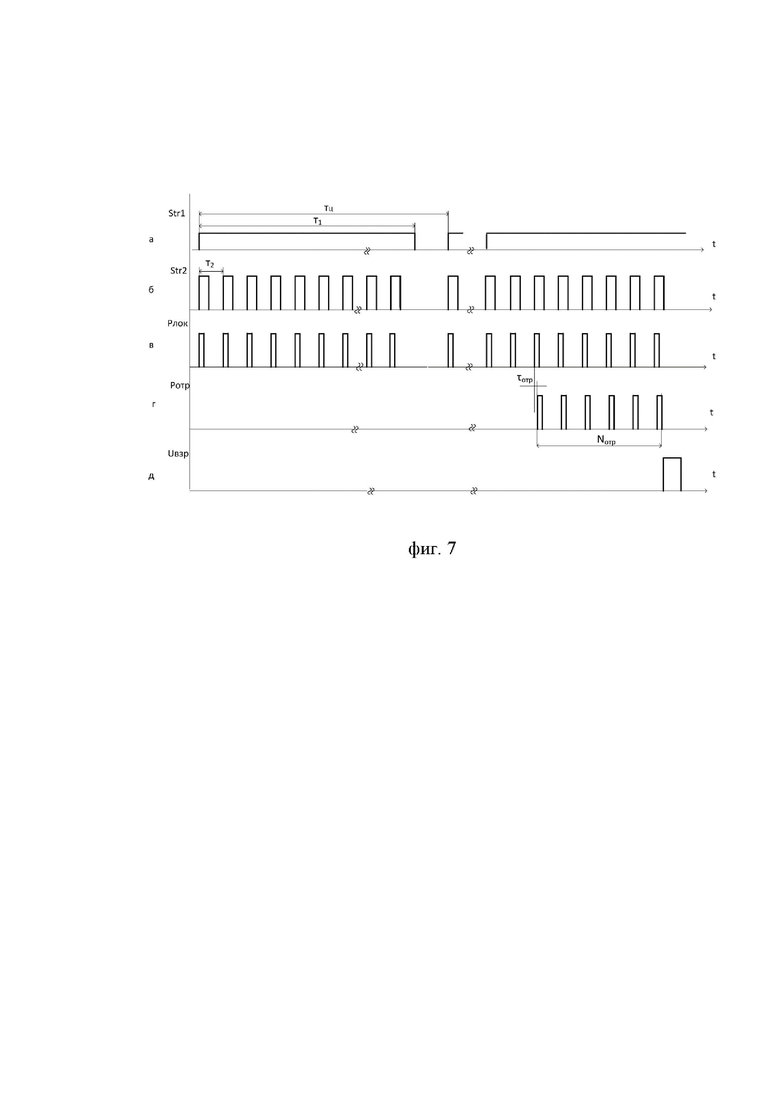
Временные диаграммы работы неконтактного датчика цели, реализующего предложенный способ, приведены на фиг. 7.
Рассмотрим пример реализации предложенного способа в неконтактном датчике цели.
Датчик размещен на носителе - УАС (ракете) соосно с его продольной строительной осью и выполнен в виде передающей системы 1 и приемной системы 2 (фиг. 1), имеющих параллельные оптические оси (оптические оси могут совпадать). Передающая система 1 содержит последовательно установленные на ее оптической оси источник 3 лазерного излучения, коллимирующий объектив 4, две цилиндрические линзы 5 с совпадающими фокальными плоскостями и аксикон 6. Приемная система 2 содержит последовательно установленные на ее оптической оси по ходу принимаемого отраженного от цели излучения отражатель 7 в виде усеченного конуса приемный объектив 8, узкополосный светофильтр 9 и установленный вне фокальной плоскости объектива четырехплощадочный фотоприемник 10 с центром фоточувствительной области на оптической оси, блок управления 11, первый выход которого подключен ко входу импульсного лазерного источника света, вход блока управления подключен к выходу фотоприемника 10, исполнительное устройство 12, вход которого соединен с вторым выходом блока управления 11.
При полете УАС (ракеты) к цели в блоке управления периодически с периодом Тц формируют первые стробы Str1 длительностью Т1 (фиг. 7,а), определяющие длительность серии световых импульсов и, соответственно, их количество. В пределах первых стробов формируют последовательность вторых стробов Str2 (фиг. 7,б) с периодом повторения стробов Т2 и длительностью каждого строба τ2 > 2Dm/c,, где Dm - максимальная дальность срабатывания взрывателя,
Последовательность вторых стробов Str2 с первого выхода блока управления 10 поступает на вход импульсного лазерного источника света 3 (преимущественно лазерный диод), формируя сигналы запуска генерации лазерного излучения. По этим сигналам источник лазерного излучения 3 генерирует периодическую последовательность импульсов лазерного излучения с периодом следования Т2, формируя на его выходе последовательность локационных импульсов Рлок (фиг. 7,в), передний фронт которых совпадает с передним фронтом соответствующих стробов Str2. При этом частоту следования световых импульсов в серии выбирают из условия F=1/Т2>VCN/LЦ, где VC - скорость полета носителя, LЦ – минимальный характерный размер цели. Это обеспечивает возможность получения не менее N импульсов отраженного от цели лазерного излучения при работе неконтактного датчика цели. Величина N выбирается априорно и определяется требуемыми значениями вероятности обнаружения цели.
Лазерное излучение, генерируемое источником 3, после прохождения через коллимирующий объектив 4 преобразуют в пучок, близкий к параллельному. Излучение лазерных диодов характеризуется выраженной анизотропией диаграммы направленности, поэтому используют анаморфотную оптическую систему из двух цилиндрических линз 5 с параллельными образующими и совпадающими фокальными плоскостями. Коллимирующий объектив 4 уменьшает расходимость генерируемого лазерного излучения, а система цилиндрических линз 5 выравнивает расходимость излучения в двух ортогональных направлениях, при этом коэффициент увеличения системы линз 5 равен отношению расходимостей лазерного излучения в двух ортогональных направлениях, привязанных к геометрии тела излучения источника 3.
После прохождения через цилиндрические линзы 5 сколлимированный пучок лазерного излучения направляют на аксикон 6. Посредством аксикона 6, ось которого совпадает с оптической осью передающей системы, за счет отражения (либо преломления) излучения на конической поверхности на выходе передающей системы формируют пучок 13 подсвечивающего объект 15 излучения с конической диаграммой направленности лазерного излучения 16 с углом раскрыва 2α и угловой шириной δα << α, (фиг. 3).
В варианте выполнения аксикона 6 в виде преломляющего конуса (фиг. 6,а), его вершина направлена по направлению распространения лазерного излучения. Угол при вершине аксикона 2θ определяют из решения уравнения α=arcsin[ncos(θ)]+θ-90° относительно α, где n - преломления материала конуса.
В варианте выполнения аксикона 6 в виде отражающего конуса - преломляющего цилиндра с осесимметричной конической выемкой (фиг. 6,б), причем ось цилиндра совпадает с оптической осью передающей системы, то вершина конической выемки выставлена против направления распространения лазерного излучения, а угол при вершине аксикона определяется как θ=arccos(cosα/n), где n - преломления материала конуса,
При этом формирование конической диаграммы направленности лазерного излучения осуществляют за счет полного внутреннего отражения излучения от конической поверхности.
В варианте выполнения аксикона 6 в виде отражающего конуса (фиг. 6,в), ось которого совпадает с оптической осью передающей системы, а вершина выставлена против направления распространения лазерного излучения, то угол 2θ при вершине аксикона равен α.
После прохождения через аксикон 6 пучок импульсного оптического излучения Рлок(t) (фиг. 7,в) имеет диаграмму направленности 16 в виде полого конуса с углом раствора 2α, с угловой шириной δα << α, ось которого совпадает с осью передающей системы 1 (фиг. 3).
Отраженное от цели (фиг. 3) оптическое излучение 17 имеет широкую диаграмму направленности, определяемую преимущественно диффузным отражением. Пучок излучения 17 Ротр (t) (фиг. 7,г) принимают приемной системой 2. Для приема отраженного от цели излучения под большими углами α в приемную систему 2 введен отражатель 7, выполненный в виде усеченного отражающего конуса. Совместно с объективом 8 он формирует поле зрения 18 приемной системы 2 в виде полой конической поверхности с углом раствора 2α и шириной δα1 > δα.
Как вариант исполнения отражателя 7, он выполнен в виде полого усеченного отражающего конуса (фиг. 2) Он установлен между объективом 8 и светофильтром 9. Оптическое поле зрения 18 приемной системы 2 обеспечивает прием отраженного от цели пучка излучения 17.
При этом пространственное положение отражателя 7 выбирают таким образом, чтобы пучок отраженного от цели излучения 17 после фокусировки объективом 8 проецировался на внеосевую область фоточувствительной площадки 21 фотоприемника 10, занимая внеосевую область либо одной, либо двух чувствительных площадок (19.2 и 19.1) (фиг. 4). Фотоприемник 10 размещен вне (перед) фокальной плоскостью объектива 7, поэтому регистрируют расфокусированный пучок излучения, отраженного от цели, формируя расфокусированное изображение 19.1 или 19.2 части цели, подсвеченной лазерным излучением.
После прохождения через систему из объектива 8 и отражателя 7 излучение проходит через узкополосный светофильтр 9, где осуществляют узкополосную спектральную фильтрацию, отсекающую фоновое излучение.
Как вариант (фиг. 5), излучение проходит через кольцевую зону 23 интерференционного светофильтра 9, представляющую собой узкополосный интерференционный светофильтр, полоса пропускания которого спектрально согласована с длиной волны лазерного излучения. При этом фоновое излучение в осевом поле зрения блокируется центральной круговой зоной 22 светофильтра 9, не пропускающей излучение в диапазоне чувствительности фотоприемника 10.
Отфильтрованное от фона излучение регистрируют фотоприемником 10 (фиг. 1, 4). Фотоприемник 10 размещен вне (перед) фокальной плоскости объектива 8, поэтому регистрируется расфокусированное изображение части цели, сформированное после прохождения через объектив 8 пучка излучения 17, отраженного от цели. Пространственное разделение сформированного объективом 8 пучка отраженного от цели излучения на четырех симметричных относительно оптической оси устройства пучка осуществляют на четырех фоточувствительных площадках (20.1 – 20.4) фотоприемника 10 (фиг. 4) при регистрации излучения. Вследствие неопределенного положения цели регистрируются оптические сигналы, поступающие на каждую из фоточувствительных площадок 20.1 – 20.4 фотоприемника 10.
После регистрации в блоке 11 формируют импульсные сигналы регистрации Р1 – Р4, пропорциональные максимальным в пределах второго временного строба Str2 значениям мощности принятых парциальных пучков излучения Ротр(t) на каждой из фоточувствительных площадок 20 фотоприемника 10. После формирования импульсных сигналов регистрации цели Р1 – Р4 (ориентация осей и номера фоточувствительных площадок однозначно связаны с системой координат датчика и приведены на фиг. 4) сравнивают их с первым пороговым уровнем.
Дальность подсвета цели сравнима с требуемой дальностью срабатывания неконтактного оптического взрывателя Lm, поэтому отраженный от цели сигнал во время полета УАС к объекту ниже уровня чувствительности приемного канала и не превышает первого порогового уровня.
При подлете к объекту уровень мощности Ротр(t) (фиг. 7,г) отраженного от цели излучения увеличивается, и хотя бы один из сигналов регистрации P1 – P4 превышает первый пороговый уровень.
На фиг. 4 приведен вид фоточувствительной площадки фотоприемника 10 при регистрации отраженного от цели пучка излучения для двух положений цели 15 (15.1 и 15.2) относительно фотоприемника 10 приемной системы 2, формируя расфокусированные изображения (19.1 и 19.2) части цели, подсвеченной лазерным излучением. Для этих случаев первый пороговый уровень превышают сигналы (Р1 , Р2 ); Р4 соответственно.
После формирования импульсных сигналов регистрации цели Р1 – Р4 формируют первый и второй разностные сигналы S1P и S2P посредством вычитания импульсных сигналов регистрации, соответствующих диагональным центрально симметричным относительно оптической оси фоточувствительных площадках:
S1P = Р1 - Р3; S2P = Р2 - Р4, (1)
Расчет по формулам (1) производится в блоке управления 11, реализованном, например, на основе микроконтроллера или сигнального процессора.
Разностные сигналы (1) позволяют устранить влияние помехи обратного рассеяния, вызванной рассеянием локационного лазерного излучения в атмосфере. Сигнал помехи обратного рассеяния РПОР в атмосфере на малых расстояниях не зависит от направления визирования, поэтому он присутствует во всех сигналах Р1 – Р4. Сигнал от цели присутствует в одном (при положении цели относительно оптической оси 15.2) или двух (положение цели 15.1) зарегистрированных сигналах и, соответственно, в одном или обоих разностных сигналах, которые при этом превышают величину второго порога. При одновременном выполнении условий превышения первого и второго порогов формируют сигнал обнаружения.
Так как частота следования световых импульсов подсвета в серии F>VCN/LЦ, то за время пролета цели будет получено больше N отраженных сигналов и, следовательно, больше N сигналов обнаружения, что повышает точность срабатывания.
Для тех же условий, что для известного способа, при количестве импульсов подсвета N*=N+1 и регистрации N сигналов, отраженных от цели, превышающих порог, вероятность пропуска цели
M =1-pN – N* (1-р) pN =1- pN (р+ N* (1-р)), (2)
По формуле (2) при N=8 M=0,00344. Таким образом, величина вероятности пропуска цели снижается более, чем на порядок по сравнению с ближайшим аналогом, у которого при тех же условиях величина пропуска объекта составляет M = 0,077.
Временной интервал между сериями излучающих импульсов формируют меньшим, чем величина 1/F, что обеспечивает отсутствие пропуска регистрируемых сигналов от цели. Длительность каждой серии выбирают много больше величины N/F.
Для определения направления на объект проводят сравнение разностных сигналов со вторым порогом и определяют их знак. При этом точность определения направления на объект составляет 45°. В таблице 1 приведены зависимости величин угла обнаружения цели от величин и знаков разностных сигналов, где введены обозначения: h - величина второго порога, а ∩ - знак логической конъюнкции (логическое И).
Таблица 1
Это позволяет увеличить точность определения направления на объект.
Блок 11 управления может быть выполнен на основе четырех усилителей, четырех пороговых устройств, четырех устройств выборки-хранения, сигнального процессора (или микроконтроллера), причем входы усилителей являются многоканальным входом блока обработки сигналов и соединены с выходами чувствительных площадок фотоприемника, а выходы подключены к входам пороговых устройств и к первым входам устройств выборки-хранения, вторые входы которых соединены с выходами соответствующих пороговых устройств, выходы устройств выборки-хранения и пороговых устройств соединены с аналоговыми входами сигнального процессора. Выход блока обработки сигналов является выходом сигнального процессора. Двухканальный выход обеспечивает выдачу на исполнительное устройство 12, представляющее собой блок подрыва, сигнала на подрыв при регистрации N сигналов обнаружения цели и сигнала углового положения цели, по которому осуществляют реализацию оптимальной геометрии подрыва.
Конструктивная реализация электронных блоков возможна на базе стандартных цифровых и аналоговых микросхем серии 140, 533, 521 и 1486. В качестве фотоприемника могут быть использованы приборы типа ФД-346.
Таким образом в предлагаемом способе неконтактного подрыва и неконтактном датчике цели формирование диаграммы направленности одиночного излучателя и диаграммы чувствительности приемной системы в виде полого конуса, формирование сигналов регистрации цели в стробируемых временных интервалах обеспечивает минимизацию ошибок обнаружения цели и повышает точность работы системы дистанционного подрыва и неконтактного датчика цели.
Описанные выше способ и устройство позволяют производить дистанционный подрыв, повысив точность и надежность изделия и позволяют, таким образом, решить задачи предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
| НЕКОНТАКТНЫЙ ДАТЧИК ЦЕЛИ | 2012 |
|
RU2496096C1 |
| Лазерный неконтактный датчик цели боеприпаса | 2023 |
|
RU2812116C1 |
| ОПТИЧЕСКИЙ БЛОК НЕКОНТАКТНОГО ВЗРЫВАТЕЛЯ ДЛЯ БОЕПРИПАСОВ | 2012 |
|
RU2498208C1 |
| Неконтактный датчик цели боеприпаса | 2022 |
|
RU2781592C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕКОНТАКТНОГО ДАТЧИКА ЦЕЛИ | 2011 |
|
RU2478184C2 |
| БОЕПРИПАС НЕКОНТАКТНОГО ДЕЙСТВИЯ С ДИСТАНЦИОННЫМ ЛАЗЕРНЫМ ВЗРЫВАТЕЛЕМ | 2012 |
|
RU2484423C1 |
| ОПТИЧЕСКИЙ БЛОК НЕКОНТАКТНОГО ВЗРЫВАТЕЛЯ БОЕПРИПАСА | 2013 |
|
RU2546219C1 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2022 |
|
RU2794167C1 |

Изобретение относится к области оптической локации и вооружению. Технический результат заключается в повышении точности при одновременном увеличении угловой зоны обзора. Технический результат достигается за счет периодического зондирования пространства серией световых импульсов с диаграммой направленности в виде полой конической поверхности, обнаружения цели и определения направления на нее путем регистрации отраженного излучения квадрантным фотоприемником в последовательности временных окон синхронно с серией световых импульсов и анализа величин и знаков первого и второго разностных сигналов, получаемых вычитанием сигналов, зарегистрированных в центрально-симметричных относительно оптической оси элементах, формирования импульса подрыва при регистрации N отраженных сигналов. 2 н. и 5 з.п. ф-лы, 7 ил., 1 табл.
1. Способ неконтактного подрыва, заключающийся
- в периодическом зондировании пространства серией световых импульсов,
- обнаружении цели путем регистрации отраженного излучения фотоприемником,
- анализе регистрируемых сигналов,
- формировании импульса подрыва при регистрации N отраженных сигналов,
- причем регистрацию отраженных от цели сигналов осуществляют в временных окнах,
- излучение зондирующих световых импульсов осуществляют одним излучателем,
отличающийся тем, что
- формируют последовательность временных окон синхронно с серией световых импульсов,
- регистрацию отраженного излучения осуществляют многоэлементным квадрантным фотоприемником,
- после регистрации в текущем временном окне отраженного от цели оптического излучения формируют первый и второй разностные сигналы посредством вычитания сигналов, зарегистрированных диагональными центрально-симметричными относительно оптической оси элементами фотоприемника,
- обнаружение цели осуществляют при превышении как минимум одним из зарегистрированных сигналов первого порога и как минимум одним из разностных сигналов второго порога,
- определяют направление на цель посредством анализа величин и знаков первого и второго разностных сигналов,
- причем зондирование пространства осуществляют оптическим излучением с диаграммой направленности в виде полой конической поверхности с углом раскрыва 2α, ось которой совпадает с осью носителя,
- отраженное оптическое излучение регистрируют вне плоскости фокусировки,
- временные окна открывают, начиная с момента излучения светового импульса, на временной интервал, определяющий максимальную дистанцию подрыва, частота следования световых импульсов в серии F>VCN/Lц, где VC - скорость полета носителя, Lц - минимальный характерный размер цели,
- временной интервал между сериями излучающих импульсов меньше 1/F, а длительность серии много больше величины N/F.
2. Неконтактный датчик цели, реализующий способ по п. 1, содержащий
- блок управления,
- аксикон,
- передающую систему, содержащую последовательно установленные на ее оптической оси две цилиндрические линзы с совпадающими фокальными плоскостями и импульсный лазерный источник света,
- приемную систему, содержащую последовательно установленные на ее оптической оси объектив, узкополосный светофильтр и фотоприемник,
- причем оптические оси передающей и приемной систем параллельны,
- первый выход блока управления подключен ко входу импульсного лазерного источника света,
- вход блока управления подключен к выходу фотоприемника,
- второй выход блока управления соединен с исполнительным устройством,
отличающийся тем, что введены
- коллимирующий объектив, установленный на оптической оси передающей системы между импульсным лазерным источником света и первой цилиндрической линзой,
- отражатель в виде усеченного конуса, установленный на оптической оси приемной оптической системы,
- причем ось симметрии аксикона совпадает с оптической осью передающей системы,
- фотоприемник выполнен четырехплощадочным и установлен вне фокальной плоскости объектива с центром фоточувствительной области на оптической оси приемной системы,
- а образующие цилиндрических линз параллельны.
3. Неконтактный датчик цели по п. 2, отличающийся тем, что
- узкополосный светофильтр выполнен из двух концентрических зон:
- центральной круговой, в пределах которой нанесено покрытие, не пропускающее излучение в диапазоне спектральной чувствительности фотоприемника,
- и смежной с ней кольцевой, в пределах которой нанесен узкополосный интерференционный фильтр с максимумом пропускания на длине волны излучения импульсного лазерного источника света.
4. Неконтактный датчик цели по п. 2, отличающийся тем, что отражатель в виде усеченного конуса выполнен полым и установлен между объективом и светофильтром.
5. Неконтактный датчик цели по любому из пп. 2-4, отличающийся тем, что аксикон выполнен в виде преломляющего конуса, вершина которого направлена по направлению распространения излучения импульсного лазерного источника света, угол при вершине аксикона 2θ определен из решения относительно α уравнения
α=arcsin[ncos(θ)]+θ-90,
где n - показатель преломления материала конуса.
6. Неконтактный датчик цели по любому из пп. 2-4, отличающийся тем, что аксикон выполнен в виде преломляющего цилиндра, выполненного из оптически прозрачного материала, с осесимметричной конической выемкой, вершина которой выставлена против направления распространения излучения импульсного лазерного источника, ось цилиндра совпадает с оптической осью передающего канала, а угол раскрыва конической выемки равен arccos(cosα/n), где n - показатель преломления материала цилиндра;
7. Неконтактный датчик цели по любому из пп. 2-4, отличающийся тем, что аксикон выполнен в виде осесимметричного отражающего конуса, вершина конуса выставлена против направления распространения излучения импульсного лазерного источника света, а угол раскрыва конуса равен α.
| СПОСОБ ПРИМЕНЕНИЯ НЕКОНТАКТНОГО ДАТЧИКА ЦЕЛИ | 2011 |
|
RU2478184C2 |
| Способ обнаружения малоразмерных воздушных целей | 2019 |
|
RU2700863C1 |
| ДАТЧИК ЦЕЛИ ДЛЯ РЕАКТИВНЫХ СНАРЯДОВ | 2012 |
|
RU2497072C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| УСТРОЙСТВО ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА | 2012 |
|
RU2516376C2 |
| НЕКОНТАКТНЫЙ ДАТЧИК ЦЕЛИ | 2012 |
|
RU2496096C1 |
| US 20090078817 A1, 26.03.2009 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДОПУСТИМЫХ ВЕЛИЧИНЫ И ДЛИТЕЛЬНОСТИ ПЕРЕГРУЗКИ СИЛОВОГО МАСЛОНАПОЛНЕННОГО ТРАНСФОРМАТОРНОГО ОБОРУДОВАНИЯ | 2012 |
|
RU2515121C1 |

