Предлагаемое изобретение относится к оптическому приборостроению и может быть использовано в военной технике при создании управляемых снарядов с лазерными полуактивными головками самонаведения (ГСН) и неконтактными оптическими взрывателями.
В полуактивных (лазерных) ГСН автоматическое наведение управляемых снарядов на объект осуществляется различными способами, известными в данной области техники, которые заключаются в лазерном подсвете объекта, приеме отраженного от объекта лазерного излучения, регистрации данного излучения фотоприемным устройством, формировании сигналов рассогласования направления на объект с осью снаряда посредством обработки зарегистрированных сигналов и формировании сигналов управления управляемых снарядов для наведения на объект.
Известен способ, описанный в книге Лазарев Л.П. Оптико-электронные приборы наведения. М. Машиностроение, 1989 с. 347-348, реализованный для регистрации сигнала, отраженного от объекта, одноэлементными фотоприемниками.
Известна лазерная полуактивная головка самонаведения, описанная в патенте RU №2473866 от 10.08.2011, F42B 15/01, которая реализует способ оптико-электронного наведения на объект, заключающийся в приеме отраженного от объекта лазерного излучения подсвета, его регистрации многоэлементным фотоприемником, формировании сигналов рассогласования направления на объект с осью управляемого снаряда посредством суммарно-разностной обработки зарегистрированных сигналов управления.
Недостатками известных способов является низкая точность наведения на объект, обусловленная как невозможностью определения текущей дальности до объекта, так и отсутствием средств дистанционного подрыва управляемых снарядов, а также необходимостью использования для их дистанционного подрыва отдельного конструктивно законченного устройства - неконтактного датчика цели.
В управляемых снарядах совместно с головками самонаведения, реализующими способ оптико-электронного наведения на объект по лазерному сигналу подсвета, отраженному от объекта, используются неконтактные оптические взрыватели (неконтактные датчики цели), реализующие способ дистанционного подрыва управляемого снаряда, которые обеспечивают подрыв боеголовки в заданной области пространства относительно объекта, преимущественно на дальности, меньше заданной.
Неконтактный оптический взрыватель обычно содержит источник оптического излучения, преимущественно лазерного, оптический передающий канал, формирующий излучение с заданной диаграммой направленности в направлении объекта, приемный оптический канал, принимающий отраженное (рассеянное) объектом излучение подсвета, фотоприемное устройство и блок обработки, определяющий наличие объекта, текущую дальность до объекта и формирующий сигнал подрыва при нахождении объекта на дальности, ближе заданной.
В указанных способах наведения управляемых снарядов способ дистанционного неконтактного подрыва реализуется независимо от способа оптико-электронного наведения, приводит к низкой точности функционирования управляемых снарядов на конечном участке траектории сближения с объектом.
Известен оптико-электронный следящий координатор и способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда, реализованный в оптико-электронном следящем координаторе, представленный в патенте РФ №2476826 от 07.07.2011,ΜΠΚ G01C 23/00, F42B 15/01.
Оптико-электронный следящий координатор содержит двухосный карданов подвес с датчиками угла и двигателями стабилизации, чувствительный элемент - трехстепенной гироскоп с датчиками углов и момента, закрепленный с возможностью вращения его ротора вокруг оси X, перпендикулярной осям Υ и Ζ, блок выработки команды на исполнительное устройство, а также лазерный дальномер, состоящий из передающего и приемного блоков. Способ наведения заключается в приеме гиростабилизированной оптической системой излучения, отраженного от цели, регистрации сфокусированного изображения фотоприемником, определении координат объекта, выработке сигналов рассогласования пропорциональных углу отклонения оптической оси объектива от направления на цель, угловом сопровождении цели посредством выдачи управляющих сигналов на двигатели стабилизации следящей платформы, определении расстояния до цели радиолокационными средствами, периодическом подсвете цели формируемым лазерным излучением, приеме отраженного от цели лазерного излучения, определении текущей дальности до цели, определении интенсивности отраженного сигнала, увеличении расходимости формируемого лазерного излучения при начале снижения интенсивности отраженного сигнала, периодическом формировании временного окна, в пределах которого осуществляется прием отраженного от цели лазерного излучения, вычислении по последовательности измеренных значений дальности до цели момента времени ТВ, в который расстояние до цели станет равным нулю и выработке команды на исполнительное устройство в данный момент времени.
Недостатками данного устройства являются:
- наличие механических перемещающихся компонентов ограничивает механическую прочность системы вследствие возникающих при выстреле управляемыми снарядами перегрузках, использование независимых оптико-электронных приемных каналов, а также высокие габариты, ввиду размещения на гиростабилизированной платформе.
Недостатки способа заключаются в следующем:
- низкая точность, обусловленная тем, что сигнал на исполнительное устройство выдается в момент времени ТВ, в который расстояние до цели станет равным нулю. Для выполнения этого условия a(t) - абсолютная величина промаха должна быть равна нулю, что не достигается при остаточном промахе, с которым осуществляется угловое автосопровождение цели.
- низкая точность формирования сигнала на увеличение расходимости формируемого лазерного излучения (т.к. реальная величина промаха a(t) неизвестна);
- расширение угловой расходимости формируемого лазерного излучения обеспечивает прием отраженного от цели излучения преимущественно при сближении на курсах, близких к встречным.
- пониженные функциональные возможности данного способа, что обусловлено ограничением условия автоматической выдачи сигнала для срабатывания исполнительного устройства в случае прямого попадания управляемого снаряда в цель, ограничением частоты отработки угловых рассогласований, и использования независимых оптико-электронных приемных каналов, что не позволяет реализовать известный способ в управляемых снарядах малого калибра.
Известны комбинированная система наведения и взрыватель, и способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда, реализованный в комбинированной системе наведения и взрывателе, представленной в патенте США №3935818 от 26.08.1974, F41G 7/22, F42C 13/02, G01S 17/66, выбранный в качестве ближайшего аналога.
Данная комплексированная система наведения и дистанционного взрывателя содержит блок управления наведением, блок обработки сигналов, приемный оптико-электронный канал, содержащий оптическую систему и фотоприемник, активный оптический неконтактный взрыватель для подрыва боеголовки на заданном расстоянии, состоящий из источника оптического (лазерного) излучения, конструктивно соединенного с приемным каналом и коаксиального с ним, причем приемный оптико-электронный канал выполнен с возможностью автоматического поворота средствами управления наведением для отслеживания цели после приема излучения наведения и является совмещенным для системы наведения и оптического взрывателя, выход фотоприемника подключен ко входу блока обработки сигналов, первый и второй выходы блока обработки сигналов соединены со входами блока дистанционного подрыва и блока управления наведением соответственно, а частота излучения источника оптического излучения и частота лазерного излучения подсвета различны.
Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда, реализованный в известной системе, заключается в периодическом с частотой ƒ1 подсвете объекта лазерным излучением на первой длине волны, приеме и регистрации отраженного от объекта лазерного излучения на первой длине волны, формировании импульсных сигналов регистрации объекта на первой длине волны, формировании сигнала углового рассогласования направления на объект путем обработки сигналов регистрации объекта и его отработки посредством разворота головки самонаведения, периодическом с частотой ƒ2 подсвете объекта лазерным излучением на второй длине волны в направлении оптической оси головки самонаведения, приеме и регистрации отраженного от объекта лазерного излучения на второй длине волны в направлении оптической оси головки самонаведения, формировании сигналов регистрации объекта на второй длине волны, измерении дальности до объекта, сравнении дальности до объекта с заданным значением, формировании сигнала дистанционного подрыва при превышении отраженным от объекта лазерным излучением на второй длине волны первого порогового уровня и достижении объектом заданной дальности, причем прием и регистрацию отраженного от объекта лазерного излучения на первой и второй длинах волн осуществляют в непересекающихся временных интервалах.
Недостатками данных устройства и способа являются:
- наличие механических перемещающихся компонентов, что ограничивает механическую прочность системы при возникающих при выстреле управляемыми снарядами перегрузках;
- низкая точность, обусловленная малой мгновенной зоной обнаружения объекта, ограниченной областью вблизи оптической оси головки обнаружения цели и возможным пропуском объекта при наличии остаточного углового рассогласования направления на цель с направлением оптической оси головки обнаружения цели. Это связано с тем, что прием оптического излучения от объекта осуществляется оптической системой, подвижной (разворачивающейся) относительно корпуса управляемого снаряда, что приводит к возникновению динамических ошибок слежения. При этом формируемый осевой пучок лазерного излучения на второй длине волны с малой расходимостью не подсвечивает объект, и, соответственно, не происходит прием отраженного сигнала. Типовой ситуацией является выход управляемого снаряда на близкий к встречному курс с объектом с поперечным остаточным промахом a(t), при котором угловая величина рассогласования направления на объект с осью управляемого снаряда ϕ=a(t)/L(t), где L(t) - текущая дальность до объекта резко возрастает при их сближении.
Задачей предлагаемого изобретения является повышение точности при одновременном увеличении угловой зоны обзора пространства.
Технический результат заключается в
- исключении динамических ошибок при определении координат объекта,
- увеличении зоны обзора с одновременным комплексированием приемных оптико-электронных систем, что обеспечивает минимизацию габаритов системы, а также в минимизации динамических ошибок наведения за счет жесткой связи ГСН с корпусом управляемого снаряда и отсутствия механически перемещающихся составных частей.
- повышении точности срабатывания неконтактного взрывателя за счет формирования сигналов обнаружения объекта в временных стробах и узкополосной фильтрации.
Поставленная задача достигается тем, что способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда заключается в периодическом с частотой ƒ1 подсвете объекта лазерным излучением на первой длине волны, приеме и регистрации отраженного от объекта пучка лазерного излучения на первой длине волны, формировании импульсных сигналов регистрации объекта на первой длине волны, формировании сигнала углового рассогласования направления на объект посредством обработки импульсных сигналов регистрации объекта, его отработки, периодическом с частотой ƒ2 подсвете объекта лазерным излучением на второй длине волны, приеме и регистрации отраженного от объекта пучка лазерного излучения на второй длине волны, формировании сигналов регистрации объекта на второй длине волны, измерении дальности до объекта, сравнении сигнала регистрации объекта на второй длине волны с первым пороговым уровнем, сравнении дальности до объекта с заданным значением, формировании сигнала дистанционного подрыва при превышении отраженным от объекта лазерным излучением на второй длине волны первого порогового уровня и достижении объектом заданной дальности, причем прием и регистрацию отраженных от объекта лазерных излучений на первой и второй длинах волн осуществляют в непересекающихся первых и вторых периодических временных интервалах, первые временные интервалы следуют с частотой ƒ1, подсвет объекта лазерным излучением на второй длине волны осуществляют после снижения углового рассогласования объекта ниже порога рассогласования, согласно изобретению при приеме лазерного излучения осуществляют узкополосную спектральную фильтрацию принимаемых лазерных излучений на первой и второй длинах волн, внутри каждого из первых временных интервалов формируют первый временной строб длительностью τ1 с частотой внутри каждого из вторых временных интервалов формируют последовательность вторых временных стробов длительностью τ2 с частотой ƒ2 при приеме отраженного от объекта излучения на первой и второй длинах волн осуществляют пространственное разделение принимаемого излучения на 4 осесимметричных относительно оптической оси парциальных пучка излучения, первый - четвертый импульсные сигналы регистрации формируют пропорционально максимальным значениям парциальных пучков излучения в пределах первых и вторых временных стробов соответственно, после регистрации отраженного от объекта лазерного излучения на второй длине волны с частотой ƒ2 осуществляют формирование первого и второго разностных сигналов посредством вычитания сигналов регистрации, соответствующих диагональным центрально симметричным относительно оптической оси парциальным потокам излучения, формируют первые сигналы обнаружения объекта с частотой ƒ2 при превышении как минимум одним сигналом регистрации объекта на второй длине волны первого порогового уровня, формируют вторые сигналы обнаружения объекта с частотой ƒ2 при превышении как минимум одним разностным сигналом второго порогового уровня, сигнал дистанционного подрыва формируют при регистрации последовательности не менее N, где N>3 - 5 первых и вторых сигналов обнаружения объекта, формирование сигнала углового рассогласования объекта относительно оптической оси осуществляют путем суммарно-разностной обработки импульсных сигналов регистрации объекта на первой длине волны, диаграмму направленности лазерного излучения на второй длине волны формируют в виде полой конической поверхности с углом раствора 2α, угловой шириной δα, ось которой совпадает с осью передающего канала, причем при регистрации пучки отраженного от объекта лазерного излучения на первой и второй длинах волн расфокусируют, τ1 << 1/ƒ1, величины τ1 и τ2 определяются максимальной дальностью полета управляемого снаряда и максимальной дальностью срабатывания взрывателя соответственно, a ƒ2 >> ƒ1.
Поставленная задача достигается также тем, что комплектированная система оптико-электронного наведения и дистанционного подрыва управляемого снаряда содержит коаксиальные приемный и передающий каналы, блок дистанционного подрыва, блок управления наведением, блок обработки сигналов, причем первый и второй выходы блока обработки сигналов соединены со входами блока дистанционного подрыва и блока управления наведением соответственно, передающий канал содержит последовательно установленные на оптической оси лазер и коллимирующий объектив, приемный канал содержит последовательно установленные на оптической оси объектив и фотоприемник, выход которого подключен ко входу блока обработки сигналов, согласно изобретению введены первый аксикон, установленный коаксиально оптической оси передающего канала после коллимирующего объектива, второй аксикон, выполненный в виде полого усеченного отражающего конуса, и интерференционный светофильтр, которые последовательно установлены между объективом и фотоприемником, причем коллимирующий объектив выполнен в виде анаморфотной оптической системы, фотоприемник выполнен в виде четырехплощадочного фотоприемника и установлен перед фокальной плоскостью объектива приемного канала.
Также интерференционный светофильтр выполнен в виде двух концентрических зон: центральной круговой, в пределах которой нанесен узкополосный интерференционный фильтр с максимумом пропускания на первой длине волны, и смежной с ней кольцевой, в пределах которой нанесен узкополосный интерференционный фильтр, с максимумом пропускания на второй длине волны.
А также первый аксикон может быть выполнен в виде преломляющего конуса, вершина которого направлена по направлению распространения излучения лазера, угол 2θ при вершине аксикона определяется из решения уравнения:
α=arcsin[ncos(θ)]+θ-90°, где n - преломления материала конуса, 2α - угол раствора диаграммы направленности лазерного излучения на второй длине волны.
Или первый аксикон может быть выполнен в виде преломляющего цилиндра с осесимметричной конической выемкой, причем ось цилиндра совпадает с оптической осью передающего канала, вершина конической выемки выставлена против направления распространения излучения лазера, а угол при вершине аксикона определяется:
θ=arccos(cosα/n),
где n - преломления материала конуса, 2α - угол раствора диаграммы направленности лазерного излучения на второй длине волны.
Сущность изобретения поясняется чертежами, на которых изображено:
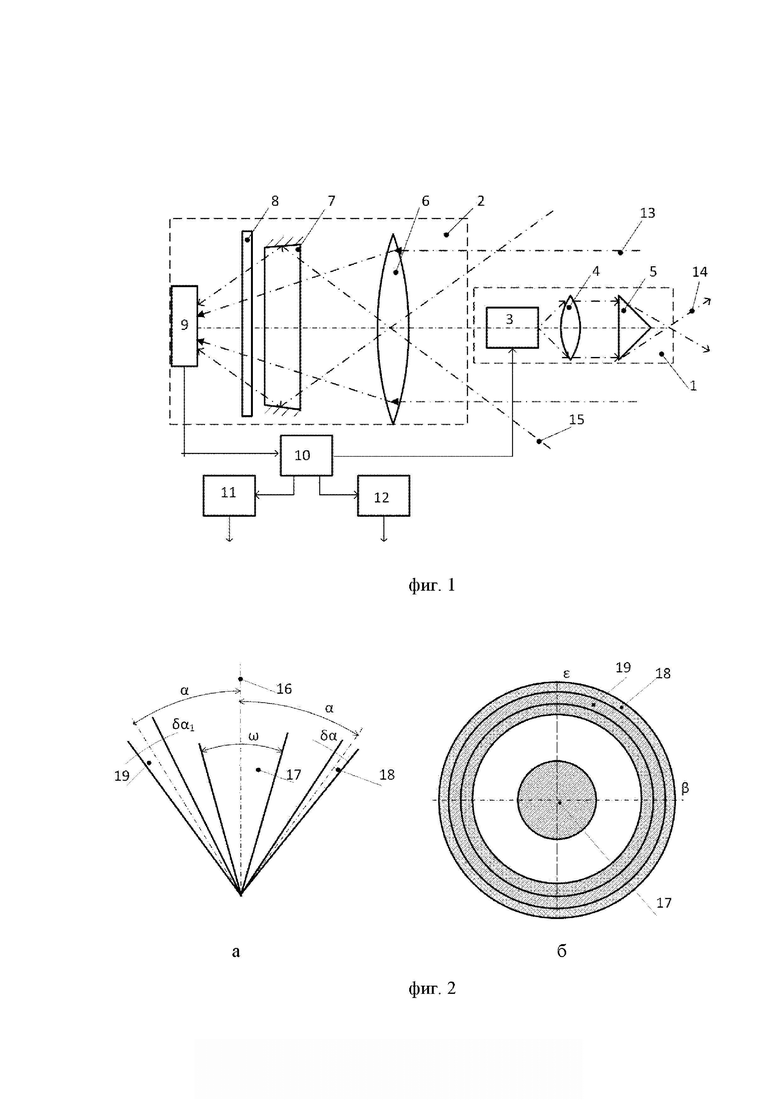
на фиг. 1 - блок-схема комплексированной системы;
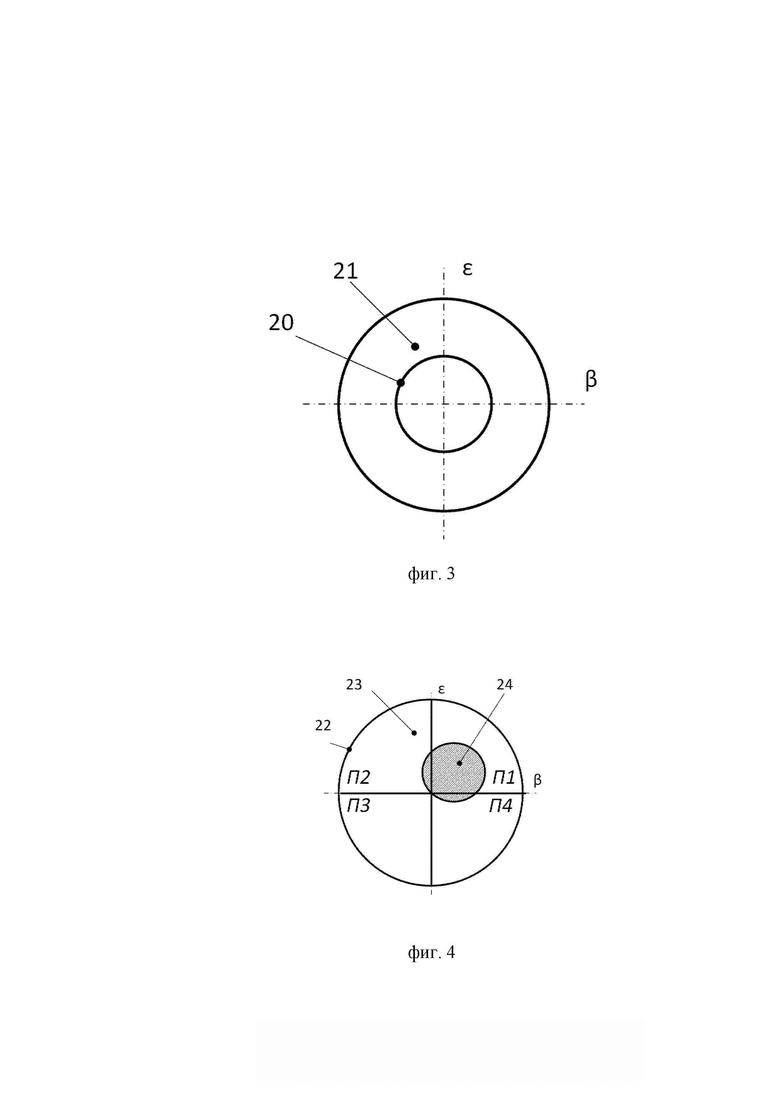
на фиг. 2 - угловые поля зрения приемного канала на первой и второй длинах волн и диаграмма направленности излучения на второй длине волны: - в продольном (а) и поперечном (б) сечениях;
на фиг. 3 - вид интерференционного светофильтра;
на фиг. 4 - вид фоточувствительной области фотоприемника при приеме излучения, отраженного от объекта на первой длине волны;
на фиг. 5 - положение пучков излучения на второй длине волны, отраженного от объекта, на фоточувствительной области фотоприемника для различного расположения объекта подсвета;
на фиг. 6 - первый аксикон в виде преломляющего (а) и отражающего (б) конуса;
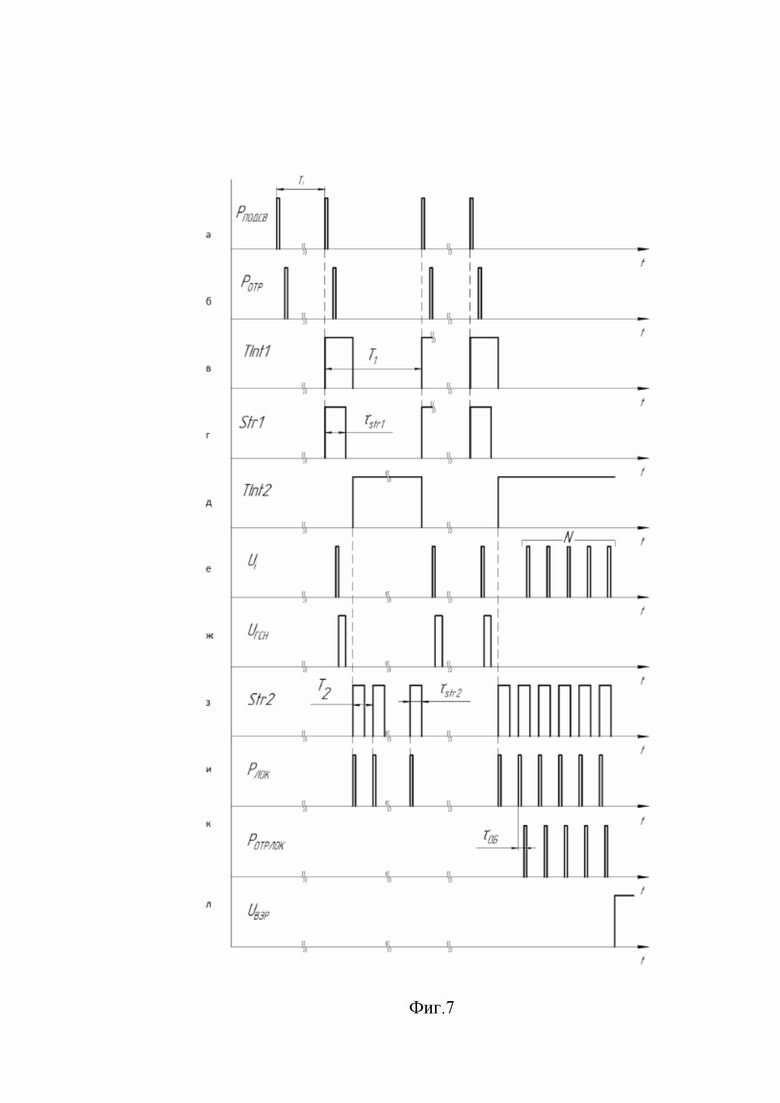
на фиг. 7 - временные диаграммы работы системы.
Комплексированная система оптико-электронного наведения и дистанционного подрыва управляемого снаряда (фиг. 1) содержит передающий оптико-электронный канал 1, приемный оптико-электронный канал 2, источник 3 лазерного излучения на второй длине волны λ2, коллимирующий объектив 4, первый аксикон 5, приемный объектив 6, второй аксикон 7, интерференционный светофильтр 8, фотоприемник 9, блок 10 обработки сигналов, блок 11 управления наведением, блок 12 дистанционного подрыва, лазерное излучение 13 на первой длине волны, отраженное от объекта, лазерное излучение 14 на второй длине волны, подсвечивающее объект, лазерное излучение 15 на второй длине волны, отраженное от объекта.
Комплексированная система (фиг. 2) характеризуется угловым положением относительно совмещенной оптической оси 16 приемного и передающего канала поля зрения 17 приемного канала на первой длине волны, поля зрения 18 приемного канала на второй длине волны, диаграммы направленности излучения 19 на второй длине волны.
Вариант реализации интерференционного светофильтра 8 (фиг. 3) выполнен в виде двух зонных интерференционных узко полосных фильтров: зона 20 узкополосного фильтра на первую длину волны и зона 21 узкополосного фильтра на вторую длину волны.
Фотоприемник 9 (фиг. 4) при приеме излучения имеет фоточувствительную область 22, состоящую из 4 (П1 - Π4) элементарных фоточувствительных площадок 23, на которых приемным объективом 6 формируется пятно излучения 24, отраженного от объекта на первой длине волны. Оси координат β и ε соответствуют горизонтальному и вертикальному направлениям.
Пространственное положение пучков излучения на второй длине волн, отраженного от объекта, на фоточувствительной области фотоприемника, сформированных приемным объективом 6, для различного расположения объекта подсвета (фиг. 5): относительное положение пятна излучения 25 при отражении от объекта в положении 26 и пятна излучения 27, отраженного от объекта в положении 28.
Варианты исполнения первого аксикона в виде преломляющего и отражающего конусов приведены на фиг. 6а и 6б.
Временные диаграммы работы комплексированной системы оптико-электронного наведения и дистанционного подрыва управляемого снаряда, реализующей предложенный способ, приведены на фиг. 7.
Рассмотрим пример реализации предложенного способа в комплексированной системе оптико-электронного наведения и дистанционного подрыва управляемого снаряда.
Система размещена на управляемом снаряде соосно с его продольной строительной осью и выполнена в виде соосных (коаксиальных) передающего канала 1 и приемного канала 2 (фиг. 1). Передающий канал 1 содержит последовательно установленные на оптической оси источник 3 лазерного излучения на второй длине волны, коллимирующий объектив 4 и первый аксикон 5. Приемный канал 2 содержит последовательно установленные на оптической оси по ходу принимаемого отраженного от объекта излучения приемный объектив 6, второй аксикон 7, интерференционный светофильтр 8 и фотоприемник 9, причем фотоприемник 9 установлен вне фокальной плоскости приемного объектива 6. Многоканальный выход фотоприемника 9 соединен с входом блока 10 обработки, первый выход которого подключен к входу блока 11 управления наведением, второй выход подключен к входу блока 12 дистанционного подрыва, а третий выход является управляющим входом источника 3 лазерного излучения.
Объект подсвечивают импульсным лазерным излучением Рподсв(t) источника, размещенного вне управляемого снаряда (например, лазерный целеуказатель) на первой длине волны с тактовой частотой ƒ1 (фиг. 7,а). При этом величина ƒ1 считается известной, определяемой параметрами лазера-подсветчика.
При попадании объекта в поле зрения приемного канала 2 посредством объектива 6 (фиг. 1) осуществляют прием пучка Pomp(t) лазерного излучения на первой длине волны 13, отраженного от объекта (фиг. 7,б), его спектральную фильтрацию. Отраженное излучение 13 принимается приемным объективом и через светофильтр 8 поступает на фотоприемник 9, где регистрируется. Поле зрения 17 приемного канала (фиг. 2) для излучения на первой длине волны представляет собой конус с углом раствора ω, определяемым геометрическими размерами фоточувствительной площадки 22 фотоприемника 9, фокусным расстоянием объектива 6 и величиной расфокусировки объектива.
Спектральная фильтрация принятого излучения отсекает фоновое излучение при прохождении через интерференционный светофильтр 8, представляющий собой узкополосный фильтр, пропускающий излучение на первой и второй длинах волн. Как вариант принятое излучение, проходит через центральную круговую зону 20 (фиг. 3) интерференционного светофильтра, выполненную как интерференционный узкополосный фильтр, спектрально согласованный с первой длиной волны излучения. Отфильтрованное от фона излучение на первой длине волны Pomp(t) регистрируют фотоприемником 9, преимущественно квадрантным. При этом осуществляют пространственное разделение принимаемого пучка излучения на 4 симметричных относительно оптической оси парциальных пучка излучения на 4-х фоточувствительных площадках (П1 - П4) 23 (фиг. 4) фотоприемника 9 перед регистрацией излучения.
Фотоприемник 9 расположен перед фокальной плоскостью объектива 6, поэтому изображение 24 пучка лазерного излучения, отраженного от объекта, представляет собой расфокусированное протяженное пятно (фиг. 4), разделенное в общем случае между 4-мя фоточувствительными площадками 23 фотоприемника (фиг. 4). Положение пятна относительно центра фоточувствительной области 22 фотоприемника определяет угловое рассогласование оси приемного канала и направления на объект. После регистрации первого отраженного от объекта импульса лазерного излучения на первой длине волны Pomp(t) (фиг. 7,б) формируют периодический первый временной интервал Tint1 (фиг. 7,в). Период следования этих интервалов Τ1 определяется частотой импульсов внешнего лазерного подсвета ƒ1: T1 = I/ƒ1. Длительность каждого первого временного интервала tTint1 >2KDmax/c, где K1>1 - коэффициент запаса. Внутри каждого первого временного интервала с привязкой к его началу формируют первый временной строб Str1 (фиг. 7,г). Длительность первого временного строба τStr1 ≥ 2Dmax/c, где Dmax - максимальная дальность полета управляемого снаряда. Первый временной строб Str1 формируют в блоке обработки сигналов 10.
Импульсные сигналы регистрации U1 - U4 (фиг. 7,е), формируют в блоке 10 пропорционально максимальным значениям мощности принятых парциальных пучков излучения парциальных пучков излучения, зарегистрированных в различных фоточувствительных площадках 23 фотоприемника 9 только в пределах первого временного строба Str1.
При приеме и регистрации отраженного от объекта импульса лазерного излучения Pomp(t), превышающего пороговый уровень, формируют импульсный сигнал регистрации объекта на первой длине волны и определяют угловые координаты объекта в системе координат, связанной с приемным каналом, и, следовательно, с управляемым снарядом. Так как оптическая ось приемного канала совпадает с продольной осью управляемого снаряда, то определенные значения угловых координат являются также величинами углового рассогласования объекта относительно продольной оси управляемого снаряда в горизонтальной и вертикальной плоскостях Δβ, Δε соответственно. Их определяют посредством суммарно-разностной обработки зарегистрированных сигналов с различных фоточувствительных площадок 23 фотоприемника U1 - U4 (ориентация осей и номера фоточувствительных площадок приведены на фиг. 4). Для этого формируют первый и второй разностные сигналы:

и суммарный сигнал SC = U1 + U2 + U3 + U4.
Угловые рассогласования определяют, как

где K1 - коэффициент передачи, определяемый геометрическими размерами фотоприемника 9, фокусным расстоянием объектива 6 и величиной расфокусировки.
Обработка по формулам (1), (2) производится в блоке обработки сигналов 10, реализованном, например, на основе микроконтроллера или сигнального процессора.
Сигналы угловых рассогласований Δβ, Δε поступают на блок управления наведением 11, реализованный, например, на базе рулевого привода, где формируют сигналы управления наведением на исполнительные устройства управляемого снаряда UГСН(t) (фиг. 7,ж), например, на вертикальные и горизонтальные рули. Выдаваемые управляющие сигналы, например, пропорциональны величинам Δβ, Δε. Одновременно определенные значения угловых рассогласований Δβ, Δε (2) в блоке 10 сравнивают с порогом ϕпор. При суммарном угловом рассогласовании Δϕ∑ = (Δβ2+Δε2)1/2, не превышающем величину ϕпор, угловое рассогласование направления на объект и оси управляемого снаряда в основном отработано. Начиная с первого момента выполнении условия Δϕ∑ < ϕпор, формируют вторые временные интервалы Tint2 (фиг. 7,д), дополнительные к Tint1. Период следования вторых временных интервалов Τ1, а их длительность - (T1 - tInt1). Внутри каждого из вторых временных интервалов формируют последовательность вторых временных стробов Str2 (фиг. 7,з) с частотой повторения стробов ƒ2 и длительностью каждого строба τ2 ≥ 2Dm/c где Dm - максимальная дальность срабатывания взрывателя, а частота ƒ2 >> ƒ1.
Во втором временном интервале в каждом временном стробе Str2 с привязкой к его началу в блоке 10 формируют сигнал запуска генерации лазерного излучения на второй длине волны. По этим сигналам источник лазерного излучения 3 (преимущественно лазерный диод) периодически с частотой ƒ2 генерирует последовательность импульсов лазерного излучения Ρлок(t) (фиг. 7,и).
Лазерное излучение, генерируемое источником 3, после прохождения через коллимирующий объектив 4 преобразуют в пучок, близкий к параллельному. Излучение лазерных диодов характеризуется в общем случае выраженной анизотропией диаграммы направленности, поэтому коллимирующий объектив выполняют преимущественно в виде анаморфотной оптической системы из как минимум двух цилиндрических линз со скрещенными образующими.
После прохождения коллимирующего объектива 4 пучок лазерного излучения на второй длине волны направляют на основание первого аксикона 5, посредством которого на выходе передающего канала формируют пучок 14 подсвечивающего объект излучения на второй длине волны с конической диаграммой направленности лазерного излучения 18 (фиг. 2).
Когда первый аксикон 5 выполнен в виде преломляющего конуса (фиг. 6а), его вершина направлена по направлению распространения лазерного излучения на второй длине волны. Угол при вершине первого аксикона 2θ определяют из решения уравнения α=arcsin[ncos(θ)]+θ-90° относительно α, где n - преломления материала конуса, 2α - угол раствора диаграммы направленности лазерного излучения на второй длине волны (фиг. 2).
Когда первый аксикон 5 выполнен в виде отражающего конуса -преломляющего цилиндра с осесимметричной конической выемкой (фиг. 6б), ось цилиндра совпадает с оптической осью передающего канала, вершина конической выемки выставлена против направления распространения лазерного излучения на второй длине волны, а угол при вершине аксикона определяется: θ=arccos(cosα/n), где n - преломления материала конуса, 2α - угол раствора диаграммы направленности лазерного излучения на второй длине волны (фиг. 2).
После прохождения через первый аксикон пучки импульсного излучения Ρлок(t) (фиг. 7,и) имеют диаграмму направленности в виде полого конуса с углом раствора 2α>ω, с угловой шириной δα << α, ось которого совпадает с осью передающего канала (фиг. 2).
Отраженное от объекта излучение Ротрлок(t) (фиг. 7,к) на второй длине волны, принимают объективом 6 приемного канала 2. Так как диаграмму направленности подсвечивающего объект 19 излучения на второй длине волны формируют в виде полого конуса с углом раствора 2α, существенно превышающим угловое поле зрения ω приемного объектива на первой длине волны 17 (фиг. 2), то для приема отраженного от объекта излучения в приемный канал введен второй аксикон 7, выполненный в виде полого отражающего конуса. Поле зрения приемного канала на второй длине волны 19 имеет вид полой конической поверхности с углом раствора 2α и шириной δα1>δα. После отражения от второго аксикона 7 излучение проходит через интерференционный светофильтр 8, где осуществляют узкополосную спектральную фильтрацию, отсекающую фоновое излучение. Как вариант, излучение проходит через кольцевую зону 21 интерференционного светофильтра 8, представляющую собой узкополосный интерференционный светофильтр, полоса пропускания которого спектрально согласована с второй длиной волны излучения. Отфильтрованное от фона излучение регистрируют фотоприемником 9 (фиг. 1). Также, как и для излучения на первой длине волны, пространственное разделение принимаемого пучка излучения на 4 симметричных относительно оптической оси парциальных пучка излучения на второй длине волны осуществляют на 4 фоточувствительных площадках фотоприемника 9 (фиг. 5) перед регистрацией излучения.
Дальность подсвета объекта на второй длине волны много меньше дальности подсвета на первой длине волны и сравнима с требуемой дальностью срабатывания неконтактного оптического взрывателя Lm, поэтому отраженный от объекта сигнал 15 на второй длине волны во время полета управляемого снаряда к объекту не превышает уровня чувствительности приемного канала и не регистрируется,
При подлете к объекту отраженный от объекта сигнал Ротрлок(t) (фиг. 7,к) превышает первый пороговый уровень. При этом импульсные сигналы регистрации U1 - U4, (фиг. 7,е) формируют в блоке 10 пропорционально максимальным значениям мощности принятых парциальных пучков излучения Ротрлок(t), зарегистрированных на различных фоточувствительных площадках 23 фотоприемника 9 только в пределах второго временного строба Str2.
После формирования импульсных сигналов регистрации объекта U1 - U4 формируют первый и второй разностные сигналы посредством вычитания сигналов регистрации, соответствующих диагональным центрально симметричным относительно оптической оси парциальным потокам излучения S1P и S2P аналогично (1).
Путем сравнения сигналов регистрации объекта на второй длине волны с первым пороговым уровнем при превышении порога как минимум одним из них формируют с частотой ƒ2 первые сигналы обнаружения объекта S1обн, причем фоновый сигнал не превышает априорно установленный первый пороговый уровень.
Одновременно формируют вторые сигналы обнаружения объекта S2обн с частотой ƒ2 при превышении как минимум одним разностным сигналом S1P, S2P второго порогового уровня, что позволяет исключить влияние рассеянного назад излучения и измеряют дальность до объекта D(t), пропорциональную временной задержке τоб сигнала Pлокomp(t) относительно соответствующего сигнала Рлок(t): D(t) = сτоб/2.
Фотоприемник вынесен из фокальной плоскости объектива 6, поэтому изображение 25 пучка лазерного излучения, отраженного от объекта 26, представляет собой расфокусированное протяженное пятно сложной формы (фиг. 5). Положение пятна относительно фоточувствительной области фотоприемника 22 определяет направление на объект. На фигуре 5 показаны два изображения 25 и 27 принятого пучка излучения на второй длине волны, отраженного от объекта Рompлок(t), при двух положениях объекта 26 и 28 относительно приемного канала 2 (и, соответственно, управляемого снаряда).
Угол раствора конуса второго аксикона 7 и его положение выбирают таким образом, чтобы изображение объектов 25, 27 на фоточувствительной области 22 фотоприемника 9 формировалось в его внеосевой области, т.е. на одной либо двух фоточувствительных площадках.
Сигнал дистанционного подрыва UВЗР (фиг. 7,л) формируют при регистрации последовательности не менее N, где N>3 - 5 первых и вторых сигналов обнаружения объекта. Это обеспечивает защиту от шумовых выбросов и от случайного срабатывания по малоразмерным помеховым объектам.
Принятие решения об обнаружении цели и ее местоположении производят, например, по номеру канала фотоприемника, в котором регистрируется превышение порогового уровня сигнала и по знаку разностного сигнала.
Блок 10 обработки сигналов может быть выполнен на основе 4 усилителей, 4 пороговых устройств, 4 устройств выборки-хранения, сигнального процессора (или микроконтроллера), причем входы усилителей являются многоканальным входом блока обработки сигналов и соединены с выходами чувствительных площадок фотоприемника, а выходы подключены к входам пороговых устройств и к первым входам устройств выборки-хранения, вторые входы которых соединены с выходами соответствующих пороговых устройств, выходы устройств выборки-хранения и пороговых устройств соединены с аналоговыми входами сигнального процессора. Выходы блока обработки сигналов являются выходами сигнального процессора. Первый двухканальный выход обеспечивает выдачу на блок управления наведением аналоговых сигналов управления, пропорциональных угловому рассогласованию направления на объект с осью управляемого снаряда. Второй выход соединен со входом блока дистанционного подрыва и выдает сигнал на срабатывание взрывателя. Третий выход соединен с управляющим входом источника лазерного излучения. Конструктивная реализация электронных блоков возможна на базе стандартных цифровых и аналоговых микросхем серии 140, 533, 521 и 1486. В качестве фото приемника могут быть использованы приборы типа ФД-346.
Таким образом предлагаемые способ и система не имеют механически перемещающихся составных частей, жесткая связь ГСН с корпусом управляемого снаряда обеспечивает минимизацию динамических ошибок наведения. Формирование сигналов регистрации объекта в стробируемых временных интервалах обеспечивает минимизацию ошибок обнаружения объекта и повышает точность работы неконтактного взрывателя.
Описанные выше способ и система позволяют производить оптико-электронное наведение управляемого снаряда на цель и дистанционный подрыв, повысив точность и надежность изделия и позволяют, таким образом, решить задачи предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| Комбинированный прибор наблюдения-прицел | 2022 |
|
RU2790221C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕПОДВИЖНЫХ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ | 2018 |
|
RU2696006C1 |
| КОМБИНИРОВАННЫЙ ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ | 2023 |
|
RU2816282C1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2021 |
|
RU2776633C1 |
| КОМБИНИРОВАННЫЙ ПРИБОР НАБЛЮДЕНИЯ - ПРИЦЕЛ | 2023 |
|
RU2816243C1 |
| Способ поражения малогабаритных летательных аппаратов | 2015 |
|
RU2610734C2 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |

Изобретение относится к оптическому приборостроению и может быть использовано при создании управляемых снарядов с лазерными полуактивными головками самонаведения и неконтактными оптическими взрывателями. По предлагаемому способу объект периодически подсвечивают с частотами ƒ1 и ƒ2 лазерными излучениями на первой и второй длинах волн в несовпадающих временных интервалах, отраженные пучки излучения спектрально фильтруют, расфокусируют и регистрируют многоплощадочным фотоприемником, формируют сигналы регистрации объекта и сигналы углового рассогласования объекта путем их суммарно-разностной обработки, отрабатывают его, измеряют дальность до объекта, сигнал дистанционного подрыва формируют при регистрации последовательности не менее N сигналов обнаружения объекта и при дальности до объекта не выше заданной, формирование лазерных излучений и их прием осуществляют внутри временных стробов, диаграмму направленности излучения на второй длине волны формируют в виде полой конической поверхности. Обеспечивается повышение точности при одновременном увеличении угловой зоны обзора. 2 н. и 3 з.п. ф-лы, 7 ил.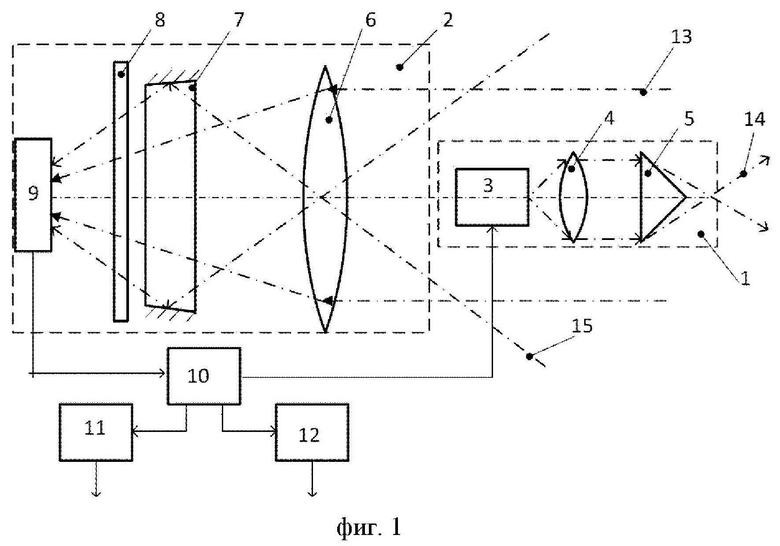
1. Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда, заключающийся в периодическом с частотой ƒ1 подсвете объекта лазерным излучением на первой длине волны, приеме и регистрации отраженного от объекта пучка лазерного излучения на первой длине волны, формировании импульсных сигналов регистрации объекта на первой длине волны, формировании сигнала углового рассогласования направления на объект посредством обработки импульсных сигналов регистрации объекта, его отработки, периодическом с частотой ƒ2 подсвете объекта лазерным излучением на второй длине волны, приеме и регистрации отраженного от объекта пучка лазерного излучения на второй длине волны, формировании сигналов регистрации объекта на второй длине волны, измерении дальности до объекта, сравнении сигнала регистрации объекта на второй длине волны с первым пороговым уровнем, сравнении дальности до объекта с заданным значением, формировании сигнала дистанционного подрыва при превышении отраженным от объекта лазерным излучением на второй длине волны первого порогового уровня и достижении объектом заданной дальности, причем прием и регистрацию отраженных от объекта лазерных излучений на первой и второй длинах волн осуществляют в непересекающихся первых и вторых периодических временных интервалах, первые временные интервалы следуют с частотой ƒ1, подсвет объекта лазерным излучением на второй длине волны осуществляют после снижения углового рассогласования объекта ниже порога рассогласования, отличающийся тем, что при приеме лазерного излучения осуществляют узкополосную спектральную фильтрацию принимаемых лазерных излучений на первой и второй длинах волн, внутри каждого из первых временных интервалов формируют первый временной строб длительностью τ1; с частотой внутри каждого из вторых временных интервалов формируют последовательность вторых временных стробов длительностью τ2 с частотой ƒ2, при приеме отраженного от объекта излучения на первой и второй длинах волн осуществляют пространственное разделение принимаемого излучения на 4 осесимметричных относительно оптической оси парциальных пучка излучения, первый-четвертый импульсные сигналы регистрации формируют пропорционально максимальным значениям парциальных пучков излучения в пределах первых и вторых временных стробов соответственно, после регистрации отраженного от объекта лазерного излучения на второй длине волны с частотой ƒ2 осуществляют формирование первого и второго разностных сигналов посредством вычитания сигналов регистрации, соответствующих диагональным центрально симметричным относительно оптической оси парциальным потокам излучения, формируют первые сигналы обнаружения объекта с частотой ƒ2 при превышении как минимум одним сигналом регистрации объекта на второй длине волны первого порогового уровня, формируют вторые сигналы обнаружения объекта с частотой ƒ2 при превышении как минимум одним разностным сигналом второго порогового уровня, сигнал дистанционного подрыва формируют при регистрации последовательности не менее Ν, где Ν>3-5 первых и вторых сигналов обнаружения объекта, формирование сигнала углового рассогласования объекта относительно оптической оси осуществляют путем суммарно-разностной обработки импульсных сигналов регистрации объекта на первой длине волны, диаграмму направленности лазерного излучения на второй длине волны формируют в виде полой конической поверхности с углом раствора 2α, угловой шириной δα, ось которой совпадает с осью передающего канала, причем при регистрации пучки отраженного от объекта лазерного излучения на первой и второй длинах волн расфокусируют, τ1<<1/ƒ1, величины τ1 и τ2 определяются максимальной дальностью полета управляемого снаряда и максимальной дальностью срабатывания взрывателя соответственно, a ƒ2>>ƒ1.
2. Комплексированная система оптико-электронного наведения и дистанционного подрыва управляемого снаряда, реализующая способ по п. 1, содержащая коаксиальные приемный и передающий каналы, блок дистанционного подрыва, блок управления наведением, блок обработки сигналов, причем первый и второй выходы блока обработки сигналов соединены со входами блока дистанционного подрыва и блока управления наведением соответственно, передающий канал содержит последовательно установленные на оптической оси лазер и коллимирующий объектив, приемный канал содержит последовательно установленные на оптической оси объектив и фотоприемник, выход которого подключен ко входу блока обработки сигналов, отличающаяся тем, что введены первый аксикон, установленный коаксиально оптической оси передающего канала после коллимирующего объектива, второй аксикон, выполненный в виде полого усеченного отражающего конуса, и интерференционный светофильтр, которые последовательно установлены между объективом и фотоприемником, причем коллимирующий объектив выполнен в виде анаморфотной оптической системы, фотоприемник выполнен в виде четырехплощадочного фотоприемника и установлен перед фокальной плоскостью объектива приемного канала.
3. Система по п. 2, отличающаяся тем, что интерференционный светофильтр выполнен в виде двух концентрических зон: центральной круговой, в пределах которой нанесен узкополосный интерференционный фильтр с максимумом пропускания на первой длине волны, и смежной с ней кольцевой, в пределах которой нанесен узкополосный интерференционный фильтр, с максимумом пропускания на второй длине волны.
4. Система по п. 2, отличающаяся тем, что первый аксикон выполнен в виде преломляющего конуса, вершина которого направлена по направлению распространения излучения лазера, угол 2θ при вершине аксикона определяется из решения уравнения:
α=arcsin[ncos(θ)]+θ-90°,
где n - преломления материала конуса, 2α - угол раствора диаграммы направленности лазерного излучения на второй длине волны.
5. Система по п. 2, отличающаяся тем, что первый аксикон выполнен в виде преломляющего цилиндра с осесимметричной конической выемкой, причем ось цилиндра совпадает с оптической осью передающего канала, вершина конической выемки выставлена против направления распространения излучения лазера, а угол при вершине аксикона определяется:
θ=arccos(cosα/n),
где n - преломления материала конуса, 2α - угол раствора диаграммы направленности лазерного излучения на второй длине волны.
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2473866C1 |
| ГОЛОВКА САМОНАВЕДЕНИЯ | 2009 |
|
RU2415375C1 |
| ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2645046C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2010 |
|
RU2439477C1 |
| CN 109780946 A, 21.05.2019. | |||

