Введение
Настоящее изобретение относится к системам и способам обнаружения повреждения стеклянной поверхности. В частности, в настоящем изобретении предоставлены системы и способы обнаружения дефектов поверхности или сколов на оконном стекле, например на ветровом стекле автомобиля.
Ветровые стекла автомобилей обычно имеют слоистую структуру из двух слоев с промежуточным слоем, обычно из пластичного материала. Внешний слой ветрового стекла автомобиля может быть легко поврежден. Наиболее распространенной причиной такого повреждения является камень или другой небольшой предмет, попадающий в ветровое стекло при движении автомобиля. Подобные повреждения также могут получить другие стеклянные поверхности, например, стекла дверей, окон и фар.
Эти повреждения обычно имеют размер до одного сантиметра, и их размер зависит от скорости движения автомобиля и температуры ветрового стекла. Повреждения такого размера на наружной поверхности ветрового стекла в большинстве случаев могут быть устранены без необходимости замены ветрового стекла, например с помощью введения необходимого состава в поврежденную область. Возможность такого ремонта зависит от многих факторов - например, от размера, глубины и расположения поврежденной зоны, и от местных стандартов по ремонту ветрового стекла.
При продолжении движения автомобиля скол на поверхности будет увеличиваться в размерах после его образования из-за прямого напряжения и статической усталости. Водители часто не замечают сколы, либо не устраняют их до тех пор, пока они сильно не увеличатся в размерах. Оставленный не устраненным маленький скол зачастую может превратиться в большую трещину на ветровом стекле, которую нельзя будет устранить, что приведет к необходимости замены ветрового стекла. Замена ветрового стекла намного более дорогостоящий и трудоемкий процесс, чем простое устранение небольшого скола. По этой причине требуется как можно быстрее идентифицировать любые сколы на ветровом стекле и как можно быстрее устранить их после возникновения.
Поскольку маленькие сколы или повреждения на стеклянной поверхности иногда трудно определить невооруженным глазом, существует необходимость в системе автоматического обнаружения сколов или повреждений на стеклянной поверхности. Это может быть более удобно и эффективно по сравнению с выполняемыми вручную способами обнаружения.
Сущность изобретения
В соответствии с первым аспектом настоящего изобретения, предлагается система обнаружения повреждения на стеклянной поверхности, содержащая:
блок датчика, расположенный рядом с поверхностью;
процессор, соединенный с блоком датчика, причем процессор сконфигурирован для анализа данных, принимаемых от блока датчика, для определения целостности поверхности; и
блок связи, сконфигурированный для вывода сигнала в ответ на определение процессором повреждения поверхности.
Эта система предоставляет преимущество, заключающее в том, что любое повреждение поверхности обнаруживается автоматически и информация о нем автоматически передается пользователю; эта система работает быстрее и точнее по сравнению с выполняемой пользователем процедурой для обнаружения повреждения и выполнения необходимых действий для его устранения.
Опционально стеклянной поверхностью может быть ветровое стекло, боковое стекло или заднее стекло автомобиля. В некоторых вариантах осуществления настоящего изобретения стеклянная поверхность может содержать закаленное или полузакаленное стекло.
Для проверки стекол автомобилей предпочтительнее, чтобы эта система была интегрирована в системы контроля и управления автомобиля для того, чтобы она активировалась при активации или перемещении автомобиля. Система контроля и управления может контролировать различные случаи возникновения изменений, например превышение пороговых значений, для вывода предупредительного сигнала.
В некоторых вариантах осуществления настоящего изобретения блок датчика может содержать микрофон. Процессор может содержать систему усиления звука и обработки сигнала. При попадании в стекло камня или другого небольшого предмета микрофон с определенным временем срабатывания и частотным спектром выдает соответствующий сигнал. Процессор может быть запрограммирован для идентификации множества заранее заданных сигналов, указывающих события повреждения. Процессор может активировать блок связи при регистрации одного из этих заранее заданных сигналов (то есть выходного сигнала микрофона).
Кроме того, после этого процессор может активировать другой компонент блока датчика для выполнения вторичной или резервной проверки.
Опционально блок датчика может содержать камеру. Камера может быть смонтирована для просмотра всей поверхности. Опционально блок датчика может содержать контроллер, сконфигурированный для перемещения, наклона или поворота камеры. То есть камера может быть сконфигурирована для сканирования поверхности.
Процессор может содержать программное обеспечение обработки изображения, которое анализирует принятое от камеры изображение поверхности для идентификации любых возможных зон повреждений, например, сколов.
Камера может работать постоянно (то есть непрерывно сканировать поверхность). Опционально, камера может активироваться периодически. Это может быть полезно с точки зрения уменьшения потребления энергии камерой. Например, для контроля поверхности ветрового стекла или другого стекла автомобиля камера может автоматически включаться в ответ на запуск двигателя автомобиля.
Опционально процессор может взаимодействовать с системой очистки ветрового стекла автомобиля. Например, процессор может управлять стеклоочистителями (дворниками) для очистки ветрового стекла до активации камеры. Это может снизить риск идентификации программным обеспечением обработки изображения грязи или каких-либо посторонних предметов на ветровом стекле в качестве повреждений.
В некоторых вариантах осуществления настоящего изобретения блок датчика может содержать и камеру, и микрофон. Камера может активироваться процессором, принимающим заранее заданный сигнал от микрофона, указывающий событие повреждения. Таким образом, камера может использоваться для проверки или подтверждения того, что ветровое стекло повреждено и/или для идентификации местоположения поврежденной зоны. Использование камеры улучшает точность системы обнаружения, поскольку микрофон может указать, что в стекло попал какой-либо предмет, что может не стать причиной повреждения стекла. Также использование камеры может затем предотвратить необходимость проведение визуального осмотра поверхности, что может быть неудобно и занимать много времени.
Опционально блок связи может быть сконфигурирован для вывода одного или более изображений, принятых от камеры, опционально по каналу передачи данных.
В некоторых вариантах осуществления настоящего изобретения блок датчика может содержать передатчик оптических сигналов и детектор оптических сигналов. Передатчик оптических сигналов и детектор оптических сигналов могут быть установлены стационарно, либо могут перемещаться относительно поверхности. Например, передатчик оптических сигналов и детектор оптических сигналов могут сканировать поверхность. Перемещением передатчика оптических сигналов и/или детектора оптических сигналов может управлять контроллер.
Передатчик оптических сигналов может быть сконфигурирован по меньшей мере для частичного освещения поверхности, а детектор оптических сигналов может быть установлен по меньшей мере для частичного приема света, излучаемого из передатчика оптических сигналов. Таким образом, детектор оптических сигналов может регистрировать количество света, отражаемого поверхностью или проходящего через поверхность.
Опционально передатчик оптических сигналов может быть установлен по меньшей мере для частичного освещения внешней поверхности и/или промежуточного слоя ветрового стекла.
Повреждение или скол на поверхности прерывает или уменьшает свет, излучаемый передатчиками оптических сигналов. Это прерывание идентифицируется процессором, причем процессор может затем активировать блок связи для вывода сигнала, указывающего, что событие повреждения произошло. Кроме того, после этого процессор может активировать другой компонент блока датчика для выполнения вторичной или резервной проверки.
Опционально блок датчика может содержать массив передатчиков оптических сигналов. Массив передатчиков оптических сигналов может быть сконфигурирован для вывода рассеянного света согласно шаблону. Угол падения света, излучаемого массивом передатчиков оптических сигналов, может быть выбран так, чтобы свет достигал полного внутреннего отражения (TIR; Total Internal Reflection) через поверхность. В вариантах осуществления настоящего изобретения, где поверхность является ветровым стеклом, свет может достигать полного внутреннего отражения вдоль внешнего слоя или вдоль промежуточного слоя между внешним и внутренним слоями. Например, массив передатчиков оптических сигналов может быть размещен внутри ветрового стекла. Повреждение в одном из слоев приведет к увеличению утечки света через него.
Передатчик (передатчики) оптических сигналов и детектор (детекторы) оптических сигналов (то есть оптическая система) могут работать постоянно. Опционально оптическая система может работать периодически. Например, оптическая система может работать совместно с микрофоном и/или камерой. За счет этого оптическая система может проверять или подтверждать данные, зарегистрированные другими компонентами системы датчиков.
В некоторых вариантах осуществления настоящего изобретения система обнаружения может содержать электропроводящую пленку или покрытие, нанесенное на поверхность. Блок датчика может содержать электрическую цепь, которая сконфигурирована для измерения электрического сопротивления пленки. Например, электрическая цепь может содержать вольтметр. Электрическое сопротивление покрытия будет изменяться при повреждении поверхности, и это изменение может быть обнаружено процессором.
Опционально пленка может быть нанесена на наружную (то есть внешнюю) лицевую сторону поверхности. Это делает пленку более чувствительной даже к малым повреждениям или сколам на внешней лицевой стороне поверхности, но срок службы пленки будет снижен, так как она будет разрушаться быстрее из-за воздействия внешних факторов, например условий окружающей среды, стеклоочистителей и т.д. Процессор может быть сконфигурирован для инструктирования блока связи для вывода сигнала по истечении заранее заданного интервала времени для напоминания пользователю, что пленку необходимо заменить.
Проводящая пленка может использоваться совместно с любыми другими раскрытыми признаками блока датчика.
В некоторых вариантах осуществления настоящего изобретения блок датчика может содержать преобразователь, сконфигурированный для вывода звуковых волн, которые инициируют вибрацию поверхности, и приемник, установленный для измерения вибрации поверхности. Преобразователь и/или приемник могут содержать пьезоэлектрический материал. Опционально преобразователь и приемник могут быть одним и тем же устройством, которое выводит импульсы звуковых волн. В некоторых вариантах осуществления настоящего изобретения может быть предложен массив преобразователей и приемников.
При отсутствии повреждений поверхность будет вибрировать с конкретным звуковым сигналом и конкретным временным профилем, который может быть заранее задан (например, на основе свойств поверхности). При наличии повреждений звуковой сигнал (или вибрация) поверхности изменяется, например, частотный спектр может быть постоянно изменен по сравнению с сигналом для поверхности без повреждений. Эти изменения обнаруживает процессор. После этого процессор может активировать другой компонент блока датчика для проверки, была ли повреждена поверхность. Кроме того, процессор может инструктировать блок связи для вывода сигнала (например, предупреждения).
Процессор может потребовать несколько звуковых сигналов (то есть вибраций), указывающих событие повреждения, которое будет зарегистрировано в течение определенного промежутка времени перед выполнением любых дальнейших действий. Это может предотвратить вывод сигналов или предупреждений из-за дождя, града или других объектов, являющихся причиной временной вибрации поверхности без каких-либо последующих повреждений.
Система звуковых вибраций может использоваться совместно с любыми другими раскрытыми признаками блока датчика. Это может повысить точность и/или надежность системы обнаружения.
Система может содержать устройство хранения данных. Устройство хранения данных может быть сконфигурировано для хранения данных, выводимых из одного или более блоков датчиков, процессора и/или блока связи. Устройство хранения данных может быть сменным, например, картой памяти или диском.
Блок связи может быть сконфигурирован для вывода визуального и/или звукового предупреждения, что событие повреждения возникло. Опционально блок связи может выводить сигнал (например, предупреждение) в удаленное местоположение. Удаленным местоположением может быть центр ремонта, который после этого может автоматически запланировать выполнение ремонта поверхности. Это может быть преимуществом для пользователя (например, для водителя) с точки зрения отсутствия каких-либо неудобств и предотвращения задержки устранения повреждений, что может сэкономить значительные средства, поскольку незначительный ремонт зачастую становится чрезмерно дорогим, если его не устранить как можно быстрее.
Блок связи может содержать приемопередатчик для вывода сигнала, например радиочастотный приемопередатчик. Опционально блок связи может быть сконфигурирован для вывода сигнала по беспроводному каналу передачи данных.
Опционально блок связи может содержать GPS-передатчик и GPS-приемник. В некоторых вариантах осуществления настоящего изобретения блок связи может выводить предупреждение в назначенный центр ремонта, независимо от расположения автомобиля. Контактная информация для назначенного центра ремонта может быть запрограммирована пользователем. В других вариантах осуществления настоящего изобретения блок связи может связываться с ближайшим к автомобилю центром ремонта, например в том случае, если ветровое стекло разбилось или если требуется существенный ремонт. Опционально блок связи может связываться с ближайшим центром ремонта назначенной сети.
В некоторых вариантах осуществления настоящего изобретения система связи может взаимодействовать с системой аварийной сигнализации автомобиля (например, с системой тревожной сигнализации). Например, если система обнаруживает трещину или поврежденную зону ветрового стекла, размер которой превышает установленное пороговое значение или категорию серьезности, то система связи может активировать систему аварийной сигнализации автомобиля. И наоборот, если система аварийной сигнализации автомобиля активируется из-за того, что окно было разбито, то система связи может вывести предупреждение.
В соответствии со вторым аспектом настоящего изобретения предлагается способ обнаружения повреждения на стеклянной поверхности, содержащий:
измерение одного или более акустических, электрических или оптических свойств поверхности, или рядом ней, с использованием блока датчика;
анализ данных, принятых от блока датчика, с использованием процессора для определения целостности поверхности;
вывод сигнала от блока связи в ответ на определение процессором повреждения поверхности.
В некоторых вариантах осуществления настоящего изобретения стеклянной поверхностью может быть поверхность ветрового стекла, или боковых стекол или заднего стекла автомобиля. В некоторых вариантах осуществления настоящего изобретения стеклянная поверхность может содержать закаленное или полузакаленное стекло.
Блок датчика может содержать множество датчиков. В некоторых вариантах осуществления настоящего изобретения способ также может содержать шаг инструктирования блока датчика для проверки, не была ли поверхность повреждена при проведении дополнительного измерения с использованием другого датчика.
В некоторых вариантах осуществления настоящего изобретения шаг измерения одного или более свойств с использованием блока датчика может содержать шаг регистрации звука события потенциального повреждения с использованием микрофона и преобразования этого звукового сигнала в электрический сигнал. Способ может содержать шаг идентификации того, соответствует ли электрический сигнал одному из множества заранее заданных сигналов, указывающих события повреждения.
Опционально шаг измерения одного или более свойств поверхности с использованием датчика может содержать шаг формирования изображения поверхности с использованием камеры. Способ также может содержать шаг перемещения камеры для сканирования по поверхности. На шаге анализа данных, принятых от блока датчика, используют программное обеспечение обработки изображения для анализа одного или более изображений поверхности для идентификации любых возможных зон повреждений, например, сколов.
Опционально способ может содержать шаг очистки поверхности до активации камеры.
В некоторых вариантах осуществления настоящего изобретения способ может содержать шаг активации камеры в ответ на регистрацию микрофоном (или другим датчиком) сигнала, указывающего событие потенциального повреждения. Таким образом, камера может использоваться на шаге проверки.
Опционально способ может содержать шаг отображения сигнала или предупреждения, выводимого блоком связи.
В некоторых вариантах осуществления настоящего изобретения шаг измерения одного или более свойств поверхности с использованием блока датчика может содержать шаг по меньшей мере частичного освещения поверхности с использованием передатчика оптических сигналов и регистрации количества света, отраженного поверхностью или прошедшего через поверхность, с использованием детектора оптических сигналов.
Шаг анализа данных, принятых от блока датчика, с использованием процессора для определения целостности поверхности может содержать шаг идентификации любого прерывания или затухания света, зарегистрированного детекторами оптических сигналов.
Опционально способ может содержать шаг выбора угла отражения света, излучаемого массивом передатчиков оптических сигналов, так, чтобы достигалось полное внутреннее отражение света между внешним и внутренним слоями (уровнями) стекла.
В некоторых вариантах осуществления настоящего изобретения способ может содержать шаг активации оптической системы в ответ на регистрацию микрофоном, камерой (или другим датчиком в блоке датчика) сигнала, указывающего событие потенциального повреждения. Таким образом, оптическая система может использоваться на шаге проверки.
В некоторых вариантах осуществления настоящего изобретения способ может содержать шаг нанесения электропроводящей пленки или покрытия на поверхность. Способ может содержать шаг измерения электрического сопротивления пленки и идентификации любых изменений в электрическом сопротивлении пленки.
В некоторых вариантах осуществления настоящего изобретения способ может содержать шаг активации электрической цепи, которая измеряет сопротивление пленки, в ответ на регистрацию микрофоном, камерой, оптической системой (или другим датчиком в блоке датчика) сигнала, указывающего событие потенциального повреждения. Таким образом, проводящая пленка может использоваться на шаге проверки.
В некоторых вариантах осуществления настоящего изобретения способ может содержать шаг измерения акустических свойств поверхности. Например, способ может содержать шаг инициирования вибрации поверхности путем вывода акустических волн от преобразователя. Способ также может содержать шаг измерения вибрации поверхности с использованием приемника и обнаружения любых изменений в выводимом звуковом сигнале, например в частотном спектре, что указывает повреждение поверхности.
Опционально способ может содержать шаг повторения анализа вибрации для заданного числа раз в течение заданного промежутка времени для подтверждения того, что изменения в звуковом сигнале не являются временными.
Способ может содержать шаг активации системы акустических вибраций в ответ на регистрацию микрофоном, камерой, оптической системой или проводящей пленкой (или другим датчиком в блоке датчика) сигнала, указывающего событие потенциального повреждения. Таким образом, система акустических вибраций может использоваться на шаге проверки.
Опционально способ может содержать шаг сохранения данных, выводимых от одного или более блоков датчика, процессора и/или блока связи.
Опционально способ может содержать шаг вывода сигнала (например, предупреждения) с использованием блока связи в удаленное местоположение. Удаленным местоположением может быть центр ремонта, который после этого может автоматически запланировать выполнение ремонта поверхности.
Блок связи может содержать приемопередатчик для вывода сигнала, например радиочастотный приемопередатчик. Опционально блок связи может быть сконфигурирован для вывода сигнала по беспроводному каналу передачи данных.
Опционально способ может содержать шаг определения местоположения ближайшего центра ремонта или ближайшего обозначенного центра ремонта и вывода сигнала (или предупреждения) в этот центр.
Варианты осуществления настоящего изобретения описываются ниже, только в качестве примеров, и показаны на прилагаемых чертежах.
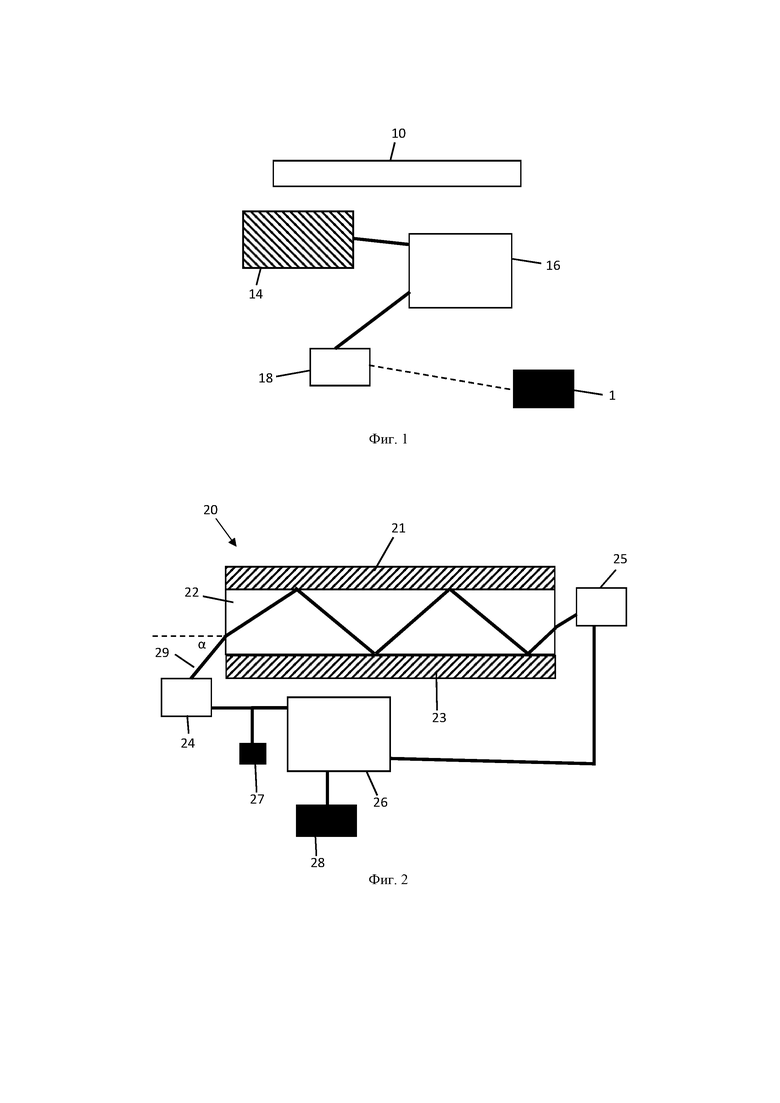
Фиг.1 - это блок-схема системы обнаружения в соответствии с одним вариантом осуществления настоящего изобретения.
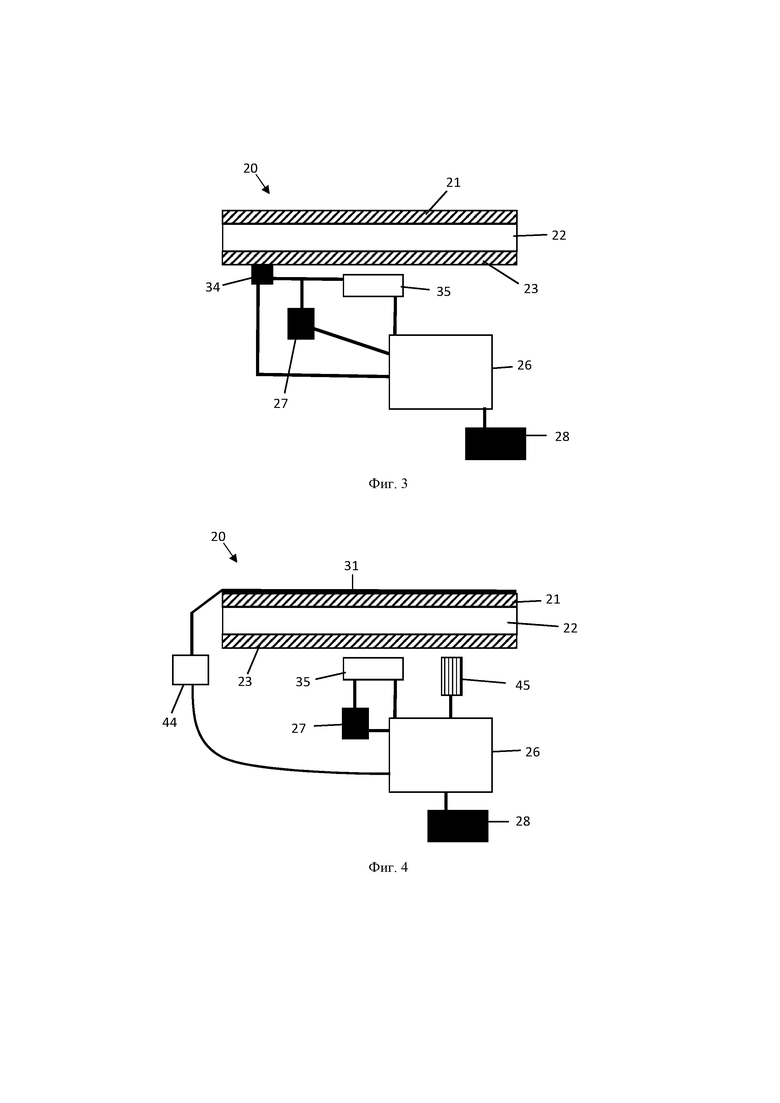
Фиг. 2 - это блок-схема системы обнаружения с оптической системой в соответствии с другим вариантом осуществления.
Фиг. 3 - это блок-схема системы обнаружения с микрофоном и камерой в соответствии с другим вариантом осуществления.
Фиг. 4 - это блок-схема системы обнаружения с камерой и системой акустических вибраций в соответствии с другим вариантом осуществления.
На фиг. 1 показана блок-схема системы обнаружения повреждения согласно настоящему изобретению. Эта система содержит блок 14 датчика, расположенный рядом со стеклянной поверхностью 10. Блок 14 датчика связан с процессором 16. Процессор 16 соединен с блоком 18 связи.
Блок 14 датчика сконфигурирован для измерения одного или более свойств или одного или более сигналов, указывающих событие повреждения стеклянной поверхности 10. К событию повреждения относится повреждение или скол на внешней лицевой стороне поверхности 10. Процессор 16 сконфигурирован для анализа данных, принятых от блока 14 датчика и для определения того, когда была повреждена поверхность 10. При обнаружении события повреждения процессор 16 может инструктировать блок 18 связи для вывода сигнала, например предупреждения, в удаленное местоположение 1. Блок 18 связи подключен к удаленному местоположению с помощью беспроводного соединения (например, по каналу передачи данных), это соединение показано пунктирной линией на фиг. 1.
Несмотря на то, что соединения между блоком 14 датчика, процессором 16 и блоком 18 связи показаны на фиг. 1 сплошными линиями, они также могут быть беспроводными соединениями.
В некоторых вариантах осуществления настоящего изобретения процессор 16 может запросить проверку события повреждения от блока 14 датчика до инструктирования блока 18 связи.
На фиг. 2 в качестве примера стеклянной поверхности показано ветровое стекло 20 автомобиля. Ветровое стекло 20 содержит внешний слой 21 стекла и внутренний слой 23 стекла с промежуточным слоем 22 из пластичного материала между ними. Промежуточный слой 22 обычно тоньше, чем внутренний слой 21 и внешний слой 23, но для наглядности слои на фиг. 2 показаны не в масштабе.
Блок датчика на фиг. 2 содержит массив передатчиков 24 оптических сигналов и массив детекторов 25 оптических сигналов. Контроллер 27 соединен с массивом передатчиков 24 оптических сигналов и процессором 26. Процессор 26 принимает данные от передатчиков 24 оптических сигналов и детекторов 25 оптических сигналов. Как показано на фиг. 1, процессор 26 соединен с блоком 28 связи, который сконфигурирован для вывода сигнала в ответ на определение процессором повреждения ветрового стекла 20.
Передатчики 24 оптических сигналов установлены для вывода рассеянного света 29, полное внутреннее отражение которого достигается при прохождении через промежуточный слой 22 ветрового стекла. Длина волны излучаемого света 29 может находиться в инфракрасном спектре, в видимом спектре или в ультрафиолетовом спектре. Угол падения α падающего света 29 на границе промежуточного слоя 22 определяет, будет ли достигнуто полное внутреннее отражение. Угол α может быть отрегулирован контроллером 27 перемещением или наклоном передатчиков 24 оптических сигналов. В других вариантах осуществления настоящего изобретения передатчики 24 оптических сигналов устанавливаются фиксированно, и контроллера 27 нет.
Массив детекторов 25 оптических сигналов устанавливается для приема света, выводимого передатчиками 24 оптических сигналов. На фиг. 2 детекторы оптических сигналов размещаются рядом с краем поверхности 20 для приема света из промежуточного слоя 22. Если соединение между промежуточным слоем 22 и внешним слоем 21 или внутренним слоем 23 ветрового стекла повреждено, например, из-за скола, то искажается количество света, принимаемого детекторами 25. Это изменение будет обнаружено процессором 26, который после этого инструктирует блок 28 связи для вывода предупреждения.
В других вариантах осуществления настоящего изобретения массив передатчиков 24 оптических сигналов может быть установлен по меньшей мере для частичного освещения внешнего слоя 21 ветрового стекла. Для излучаемого света 29 может быть достигнуто полное внутреннее отражение вдоль внешнего слоя 21. Это может предоставить детекторам 25 оптических сигналов возможность обнаружения повреждения внешней лицевой стороны внешнего слоя 21, которое не распространяется на промежуточный слой 22. Опционально передатчики 24 оптических сигналов и/или детекторы 25 оптических сигналов могут быть размещены рядом с внешним слоем 21 (то есть с наружной стороны ветрового стекла 20). Опционально передатчики 24 оптических сигналов и/или детекторы 25 оптических сигналов могут быть размещены рядом с внутренним слоем 23 (то есть внутри автомобиля).
На фиг. 3 блок датчика из фиг. 2 заменен микрофоном 34, расположенным рядом с ветровым стеклом 20 и камерой 35. Микрофон 34 установлен для преобразования звуковых сигналов в электронные сигналы, принимаемые процессором 26. Процессор 26 содержит усилитель сигнала и сигнальный процессор. Процессор 26 запрограммирован для анализа, соответствует ли, либо примерно соответствует ли, сигнал, принятый от микрофона 34, заранее заданному сигналу, указывающему событие повреждения. Например, при попадании во внешний слой 21 камня или другого небольшого предмета, являющегося причиной скола, выводится сигнал от микрофона 34 с определенным временем срабатывания и частотным спектром.
Существует риск того, что микрофон 34 может среагировать на звуки изнутри автомобиля или на звуки от попадания предметов во внешний слой 21 ветрового стекла, которые не приводят к возникновению повреждений, но идентифицируются процессором 26 как события повреждения. В этом случае камера 35 может использоваться для проверки результатов срабатывания микрофона 34.
Когда процессор 26 идентифицирует событие возможного повреждения из сигнала микрофона 34, активируется камера 35. Камера 35 может находиться в режиме ожидания вплоть до активации процессором 26 для снижения энергопотребления. При необходимости контроллер 27 может переместить, наклонить или повернуть микрофон 34 и/или камеру 35 для того, чтобы камера 35 могла проверить всю поверхность 23 ветрового стекла. После этого изображение или изображения принимается/принимаются процессором 26, который содержит программное обеспечение обработки изображения, сконфигурированное для анализа изображения (изображений) и идентификации зон повреждений на ветровом стекле 20. Поскольку внешний слой 23, промежуточный слой 22 и внешний слой 21 являются прозрачными, для анализа зон повреждений на внешнем слое 21 камера 35 может быть размещена внутри автомобиля.
Если процессор 26 определит наличие зоны повреждения (например, скола), то процессор 26 инструктирует блок 28 связи для вывода предупреждения.
На фиг. 4 электропроводящая пленка 31 нанесена на внешнюю лицевую сторону внешнего слоя 21 (то есть, на внешнюю лицевую сторону ветрового стекла 20). Пленка 31 подключена к электрической цепи 44 для измерения электрического сопротивления пленки 31. В дополнение к электрической цепи 44 блок датчика содержит камеру 35 (как показано на фиг. 3) и систему 45 акустических вибраций.
Одна или более функций блока датчика может находиться в режиме непрерывной работы. Например, электропроводящая пленка 31 и система 45 акустических вибраций могут использоваться как первичное средство обнаружения.
Процессор 26 сконфигурирован для сравнения электрического сопротивления пленки 31 (измеренного цепью 44) с заранее заданным сопротивлением полностью целой пленки 31. Значение сопротивления "повреждений нет" может быть измерено цепью 44 сразу после нанесения пленки 31 на ветровое стекло 20. Электрическое сопротивление пленки 31 изменяется при любом повреждении электропроводящей пленки 31 (например, при нарушении целостности) из-за повреждения внешнего слоя 21 ветрового стекла. Если процессор 26 определяет изменение сопротивления пленки 31, то с помощью камеры 35 (как описано выше) и/или системы 45 акустических вибраций можно проверить, какое конкретно событие повреждения произошло.
Система 45 акустических вибраций содержит преобразователь, сконфигурированный для вывода импульсов акустических волн, которые инициируют вибрацию ветрового стекла 20, и приемник, установленный для измерения вибрации ветрового стекла 20. В этом варианте осуществления настоящего изобретения преобразователь и приемник реализованы в одном пьезоэлектрическом устройстве 44, но в других вариантах осуществления могут использоваться отдельные устройства.
При отсутствии повреждений ветровое стекло 20 будет вибрировать с конкретным акустическим сигналом и временным профилем, которые могут быть заданы заранее. Если ветровое стекло 20 повреждено, то приемник 44 будет постоянно принимать измененный сигнал. Процессор 26 анализирует сигналы, зарегистрированные приемником 44, и обнаруживает изменение сигнала по сравнению с сигналом при отсутствии повреждений.
Если процессор 26 принимает несколько акустических сигналов, указывающих событие повреждения в течение определенного промежутка времени (то есть изменение не было временным), то процессор может проанализировать, изменилось ли электрическое сопротивление пленки 31. Если при проверке пленки 31 подтверждено событие повреждения, то процессор 26 может инструктировать блок связи 28 для вывода предупреждения.
Альтернативно, также процессор 26 может выполнить проверку наличия повреждения с использованием камеры 35. Использование камеры 35 описано выше со ссылкой на фиг. 3.
Эта система двухступенчатой проверки обеспечивает более точное и надежное обнаружение повреждений ветрового стекла по сравнению с известными системами.
Необходимо понимать, что блок датчика может выполнять любую комбинацию показанных на фиг. 2-4 функций, и что системы, представляемые как средства проверки, могут в равной степени использоваться как средства первичного обнаружения и наоборот. По существу, блок датчика в настоящем изобретении может содержать один или более следующих компонентов: микрофон 34; камера 35; оптическая система 24, 25; проводящая пленка 31 и электрическая цепь 44; и/или система 45 акустических вибраций. Например, оптическая система на фиг. 2 может использоваться в блоках датчика на фиг. 3 или 4, либо для начальной индикации события повреждения, либо для проверки диагностики одного из других компонентов блока датчика.
Необходимо отметить, что приведенные выше варианты осуществления настоящего изобретения служат в качестве иллюстрации и не ограничивают возможности реализации данного изобретения, а специалист в данной области техники может разработать большое число альтернативных вариантов осуществления без нарушения объема настоящего изобретения, определенного в прилагаемой формуле изобретения. Любые ссылочные позиции в формуле изобретения, заключенные в скобки, не должны рассматриваться в качестве ограничения формулы изобретения. Слова "содержащий" и "содержит", а также подобные им, не исключают наличие элементов или шагов, отличных от перечисленных в любом из пунктов формулы изобретения или описании в целом. В настоящем описании термин "содержит" означает "включает или состоит из", а термин "содержащий" означает "включающий или состоящий из". Упоминание элемента в единственном числе не исключает наличия нескольких подобных элементов и наоборот. Тот факт, что определенные характеристики перечисляются в различных пунктах формулы изобретения не означает того, что для достижений преимуществ не может использоваться комбинация этих характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЛИЯНИЯ СВЕТА И ЗВУКА НА ЧЕЛОВЕКА | 2014 |
|
RU2667615C2 |
| ОБНАРУЖЕНИЕ КОНДЕНСАТА ДЛЯ ПОВЕРХНОСТЕЙ ТРАНСПОРТНОГО СРЕДСТВА ЧЕРЕЗ ПЕРЕДАТЧИКИ И ПРИЁМНИКИ СВЕТА | 2018 |
|
RU2692299C1 |
| ТОНКАЯ ITO-ПЛЕНКА И ТЕРМИНАЛЬНОЕ УСТРОЙСТВО | 2014 |
|
RU2619204C2 |
| УСТРОЙСТВО ОБРАБОТКИ КОЖИ НА ОСНОВЕ СВЕТА | 2017 |
|
RU2741466C1 |
| БЕСПРОВОДНОЙ СПОСОБ ЗАРЯДКИ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2022 |
|
RU2789308C1 |
| СПОСОБЫ ДЛЯ ИНИЦИИРОВАНИЯ КОНЕЧНЫХ АВТОМАТОВ В ОТВЕТ НА СОБЫТИЯ КАСАНИЯ, ОБНАРУЖЕННЫЕ В БЫТОВЫХ УСТРОЙСТВАХ | 2015 |
|
RU2685976C2 |
| ОСТЕКЛЕНИЕ | 2006 |
|
RU2393125C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗВУКОВЫХ СИГНАЛОВ | 2009 |
|
RU2542586C2 |
| ИНГАЛЯТОР С ДВУМЯ МИКРОФОНАМИ ДЛЯ ОБНАРУЖЕНИЯ ВДЫХАЕМОГО ПОТОКА | 2015 |
|
RU2664624C2 |
| СПОСОБ ГОЛОСОВОГО УПРАВЛЕНИЯ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2019 |
|
RU2766255C1 |
Система обнаружения повреждения стеклянной поверхности (10) содержит блок датчиков (14), расположенный рядом с поверхностью (10) и содержащий множество датчиков, сконфигурированных для обнаружения различных параметров. Система содержит процессор (16), соединенный с блоком датчиков (14). Процессор (16) сконфигурирован для анализа данных, принимаемых от блока датчиков (14), для определения целостности поверхности (10). Система содержит блок связи (18), сконфигурированный для вывода сигнала в ответ на определение процессором (16) повреждения поверхности (10). При определении того, повреждена ли поверхность (10), процессор (16) сконфигурирован для применения шага проверки, обеспечивающего то, что повреждение указывается с использованием множества датчиков блока датчиков (14). Предложен также способ обнаружения повреждения стеклянной поверхности. Достигается автоматическое обнаружение сколов. 2 н. и 42 з.п. ф-лы, 4 ил.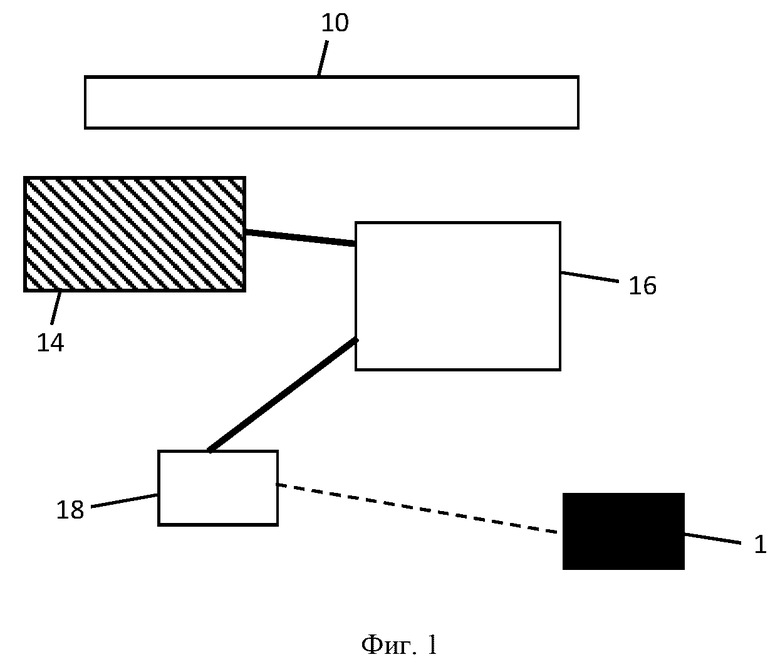
1. Система обнаружения повреждения стеклянной поверхности, содержащая:
блок датчиков, расположенный рядом с поверхностью и содержащий множество датчиков, сконфигурированных для обнаружения различных параметров;
процессор, соединенный с блоком датчиков, причем процессор сконфигурирован для анализа данных, принимаемых от блока датчиков, для определения целостности поверхности; и
блок связи, сконфигурированный для вывода сигнала в ответ на определение процессором повреждения поверхности,
причем, при определении того, повреждена ли поверхность, процессор сконфигурирован для применения шага проверки, обеспечивающего то, что повреждение указывается с использованием множества датчиков блока датчиков.
2. Система по п. 1, в которой поверхностью является ветровое стекло автомобиля.
3. Система по п. 1 или 2, в которой множество датчиков блока датчиков содержит микрофон, а процессор содержит систему усиления звука и обработки сигналов.
4. Система по п. 3, в которой процессор сконфигурирован для идентификации множества заранее заданных звуковых сигналов, указывающих события повреждения.
5. Система по любому из пп. 1-4, в которой множество датчиков блока датчиков содержит камеру для формирования изображения поверхности, а процессор содержит программное обеспечение обработки изображения для анализа принятых от камеры изображений для идентификации любых зон повреждений.
6. Система по п. 5, также содержащая контроллер, сконфигурированный для перемещения, наклона или поворота камеры.
7. Система по п. 5 или 6, в которой блок связи сконфигурирован для вывода одного или более изображений, принятых от камеры, по каналу передачи данных.
8. Система по любому из пп. 1-7, в которой множество датчиков блока датчиков содержит передатчик оптических сигналов и детектор оптических сигналов, причем передатчик оптических сигналов сконфигурирован для по меньшей мере частичного освещения поверхности, а детектор оптических сигналов установлен для по меньшей мере частичного приема света, излучаемого из передатчика оптических сигналов.
9. Система по п. 8, в которой множество датчиков блока датчиков содержит массив передатчиков оптических сигналов и массив детекторов оптических сигналов.
10. Система по п. 8 или 9, в которой угол падения света, излучаемого одним или более передатчиком оптических сигналов, выбран так, чтобы достигалось полное внутреннее отражение света через поверхность.
11. Система по п. 2, в которой блок датчиков содержит передатчик оптических сигналов и детектор оптических сигналов, причем передатчик оптических сигналов сконфигурирован для по меньшей мере частичного освещения поверхности, а детектор оптических сигналов установлен для по меньшей мере частичного приема света, излучаемого из передатчика оптических сигналов,
при этом ветровое стекло содержит внешний слой и внутренний слой, разделенные промежуточным слоем, и свет испытывает полное внутреннее отражение вдоль промежуточного слоя.
12. Система по любому из предшествующих пунктов, также содержащая электропроводящую пленку, нанесенную на поверхность.
13. Система по п. 12, в которой множество датчиков блока датчиков содержит электрическую цепь для измерения электрического сопротивления пленки.
14. Система по п. 2, также содержащая электропроводящую пленку, нанесенную на внешнюю сторону ветрового стекла.
15. Система по любому из предшествующих пунктов, в которой множество датчиков блока датчиков содержит преобразователь, сконфигурированный для вывода акустических волн, которые инициируют вибрацию поверхности, и приемник, выполненный с возможностью измерения вибрации поверхности.
16. Система по п. 15, в которой преобразователь и приемник являются одним и тем же устройством, которое сконфигурировано для вывода импульсов акустических волн.
17. Система по любому из предшествующих пунктов, в которой блок связи сконфигурирован для вывода предупреждения о том, что поверхность повреждена, в удаленное местоположение.
18. Система по п. 17, в которой блок связи содержит приемопередатчик для вывода сигнала, и/или GPS-передатчик, и/или GPS-приемник.
19. Способ обнаружения повреждения стеклянной поверхности, включающий: измерение двух или более акустических, электрических или оптических
свойств поверхности, или рядом ней, с использованием блока датчиков, содержащего множество датчиков, сконфигурированных для обнаружения различных параметров;
анализ данных, принятых от блока датчиков, с использованием процессора, для определения целостности поверхности; и
вывод сигнала из блока связи в ответ на определение процессором повреждения поверхности,
причем, при определении того, повреждена ли поверхность, процессор применяет шаг проверки, обеспечивающий то, что повреждение указывается с использованием множества датчиков блока датчиков.
20. Способ по п. 19, в котором стеклянной поверхностью является ветровое стекло автомобиля.
21. Способ по п. 19 или 20, в котором шаг измерения двух или более свойств с использованием блока датчиков включает обнаружение звукового сигнала события потенциального повреждения с использованием микрофона и преобразование этого звукового сигнала в электрический сигнал.
22. Способ по п. 21, включающий идентификацию того, соответствует ли электрический сигнал одному из множества заранее заданных сигналов, указывающих события повреждения.
23. Способ по любому из пп. 19-22, в котором шаг измерения двух или более свойств поверхности с использованием блока датчиков включает формирование изображения поверхности с использованием камеры.
24. Способ по п. 23, включающий перемещение камеры для сканирования поверхности.
25. Способ по п. 23 или 24, в котором на шаге анализа данных, принятых от блока датчиков, используют программное обеспечение обработки изображения для анализа одного или более изображений поверхности для идентификации любых возможных зон повреждений.
26. Способ по любому из пп. 23-25, также включающий шаг очистки поверхности до активации камеры.
27. Способ по любому из пп. 23-26, в котором шаг измерения двух или более свойств с использованием блока датчиков включает регистрацию звука события потенциального повреждения с использованием микрофона и преобразование этого звукового сигнала в электрический сигнал, и способ включает идентификацию того, соответствует ли электрический сигнал одному из множества заранее заданных сигналов, указывающих события повреждения, при этом способ также включает проверку того, что событие повреждения произошло, путем активации камеры в ответ на регистрацию микрофоном сигнала, указывающего событие потенциального повреждения.
28. Способ по любому из пп. 19-27, в котором шаг измерения двух или более свойств поверхности с использованием блока датчиков включает по меньшей мере частичное освещение поверхности с использованием по меньшей мере одного передатчика оптических сигналов и регистрацию количества света, отраженного поверхностью или прошедшего через поверхность, с использованием по меньшей мере одного детектора оптических сигналов.
29. Способ по п. 28, в котором шаг анализа данных, принятых от блока датчиков, включает идентификацию любого прерывания или затухания света, зарегистрированного одним или более детектором оптических сигналов.
30. Способ по п. 28 или 29, также включающий выбор угла падения света, излучаемого одним или более передатчиком оптических сигналов, так, чтобы достигалось полное внутреннее отражение света через поверхность.
31. Способ по п. 21, в котором шаг измерения двух или более свойств поверхности с использованием блока датчиков включает по меньшей мере частичное освещение поверхности с использованием по меньшей мере одного передатчика оптических сигналов и регистрацию количества света, отраженного поверхностью или прошедшего через поверхность, с использованием детектора оптических сигналов,
при этом способ также включает активацию по меньшей мере одного передатчика оптических сигналов и по меньшей мере одного детектора оптических сигналов в ответ на регистрацию микрофоном сигнала, указывающего событие потенциального повреждения.
32. Способ по п. 23, в котором шаг измерения двух или более свойств поверхности с использованием блока датчиков включает по меньшей мере частичное освещение поверхности с использованием по меньшей мере одного передатчика оптических сигналов и регистрацию количества света, отраженного поверхностью или прошедшего через поверхность, с использованием по меньшей мере одного детектора оптических сигналов,
при этом способ также включает активацию по меньшей мере одного передатчика оптических сигналов и по меньшей мере одного детектора оптических сигналов в ответ на регистрацию камерой сигнала, указывающего событие потенциального повреждения.
33. Способ по любому из пп. 19-32, включающий нанесение электропроводящей пленки на поверхность и измерение электрического сопротивления пленки.
34. Способ по п. 33, в котором шаг анализа данных, принятых от блока датчиков, включает выполнение анализа, изменилось ли электрическое сопротивление пленки.
35. Способ по любому из пп. 19-34, включающий измерение акустических свойств поверхности путем вывода акустических волн от преобразователя для инициирования вибрации поверхности и измерения вибрации поверхности с использованием приемника.
36. Способ по п. 35, в котором шаг анализа данных, принятых от блока датчиков, включает обнаружение любых изменений вибрации поверхности, таких как изменения в частотном спектре.
37. Способ по п. 36, включающий повторение измерений вибрации заданное число раз в течение заданного промежутка времени для подтверждения того, что изменения вибрации поверхности не являются временными.
38. Способ по п. 21, включающий измерение акустических свойств поверхности путем вывода акустических волн от преобразователя для инициирования вибрации поверхности и измерения вибрации поверхности с использованием приемника, а также включающий активацию преобразователя и приемника акустических вибраций в ответ на регистрацию микрофоном сигнала, указывающего событие потенциального повреждения.
39. Способ по п. 23, включающий измерение акустических свойств поверхности путем вывода акустических волн от преобразователя для инициирования вибрации поверхности и измерения вибрации поверхности с использованием приемника, а также включающий активацию преобразователя и приемника акустических вибраций в ответ на регистрацию камерой сигнала, указывающего событие потенциального повреждения.
40. Способ по п. 28, включающий измерение акустических свойств поверхности путем вывода акустических волн от преобразователя для инициирования вибрации поверхности и измерения вибрации поверхности с использованием приемника, а также включающий активацию преобразователя и приемника акустических вибраций в ответ на регистрацию сигнала, указывающего событие потенциального повреждения, одним или более детектором оптических сигналов.
41. Способ по п. 34, включающий измерение акустических свойств поверхности путем вывода акустических волн от преобразователя для инициирования вибрации поверхности и измерения вибрации поверхности с использованием приемника, а также включающий активацию преобразователя и приемника акустических вибраций в ответ на регистрацию сигнала, указывающего событие потенциального повреждения, проводящей пленкой.
42. Способ по любому из пп. 19-41, в котором шаг вывода сигнала из блока связи включает вывод предупреждения в удаленное местоположение.
43. Способ по п. 42, в котором удаленным местоположением является центр ремонта.
44. Способ по п. 43, включающий определение местоположения ближайшего центра ремонта или ближайшего назначенного центра ремонта и вывод предупреждения в это местоположение.
| CN105292049A, 03.02.2016 | |||
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОГО СНИЖЕНИЯ НАГРУЗКИ НА СИСТЕМУ ПОВЕРХНОСТЕЙ, СОЗДАЮЩИХ БОЛЬШУЮ ПОДЪЕМНУЮ СИЛУ, В ЧАСТНОСТИ НА СИСТЕМУ ПОСАДОЧНЫХ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2415776C2 |
| DE10159006A1, 12.06.2003 | |||
| DE102005012290A1, 21.09.2006 | |||
| CN106080516A, 09.11.2016 | |||
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОГО СНИЖЕНИЯ НАГРУЗКИ НА СИСТЕМУ ПОВЕРХНОСТЕЙ, СОЗДАЮЩИХ БОЛЬШУЮ ПОДЪЕМНУЮ СИЛУ, В ЧАСТНОСТИ НА СИСТЕМУ ПОСАДОЧНЫХ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2415776C2 |
| US6535126B2, 18.03.2003. | |||

