ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и устройству обеспечения автоматического снижения нагрузки на систему несущих поверхностей с высокой подъемной силой, в частности на систему посадочных закрылков летательного аппарата.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Системы поверхностей с высокой подъемной силой используются на летательных аппаратах для увеличения подъемной силы при взлете или посадке; обычно к ним относятся посадочные закрылки, отклоняемые носки крыльев или зоны крыльев с изменяемым профилем или аналогичные устройства, с помощью которых профиль крыла может изменяться и/или увеличиваться для увеличения подъемной силы. На многих самолетах гражданской авиации, а также на самолетах военной транспортной авиации такие поверхности с высокой подъемной силой приводятся в действие центральным приводным механизмом, который через вращающийся вал, обычно проходящий по всему размаху крыла, соединяется с местными оконечными управляющими элементами, которыми снабжены поверхности, создающие высокую подъемную силу. Местные оконечные управляющие элементы могут содержать шпиндельные или кривошипные механизмы или аналогичные приводные устройства. В большинстве случаев такие поверхности, создающие высокую подъемную силу, размещены вдоль вращающегося вала. Обычно первый такой вращающийся вал проходит вдоль передней части профиля крыла, обеспечивая привод отклоняемых носков крыльев, имеющихся в этой части, в то время как второй вращающийся вал проходит вдоль задней части крыла, обеспечивая привод посадочных закрылков, имеющихся в этой части. Если при выпуске или уборке поверхностей, создающих высокую подъемную силу, происходит заклинивание вращающегося вала или оконечных управляющих элементов, связанных с поверхностями, создающими высокую подъемную силу, то часть вращающегося вала между местом заклинивания и блоком привода подвергается скручивающему напряжению, создаваемому двигателем привода, до тех пор, пока не будет достигнут момент при заторможенном двигателе. Это приводит к возникновению значительных скручивающих усилий, которые при современном состоянии техники могут быть снижены только после окончания полета и проведения соответствующих ремонтных работ. До выполнения таких ремонтных работ система вращающегося вала остается в напряженном состоянии, нагруженная максимальным моментом двигателя. Таким образом, в результате возникновения значительного скручивающего момента вращающегося вала в случае заклинивания система вращающегося вала подвергается очень большому механическому напряжению между приводным двигателем и местом заклинивания, причем механическое напряжение еще больше увеличивается, если в систему вращающегося вала дополнительно вносятся изгибающие моменты и растягивающие/сжимающие нагрузки в результате изгиба крыла, ударных нагрузок при посадке или аналогичных факторов. Отдельные элементы системы вращающегося вала должны быть рассчитаны таким образом, чтобы обеспечивать соответствующую прочность для обеспечения необходимой безопасности, которая вычисляется с учетом возможных достаточно длительных интервалов, в течение которых система вращающегося вала находится под нагрузкой, что ограничивает возможности оптимизации веса валов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Имеется потребность в способе и устройстве для обеспечения автоматического снижения нагрузки на систему поверхностей, создающих большую подъемную силу, в частности на систему посадочных закрылков летательного аппарата, в результате чего создается возможность разгрузки вращающегося вала, имеющегося в системе поверхностей, создающих большую подъемную силу, от избыточных скручивающих усилий в случае заклинивания вала.
В изобретении предлагается способ обеспечения автоматического снижения нагрузки на систему поверхностей, создающих большую подъемную силу, в частности на систему посадочных закрылков летательного аппарата, в случае заклинивания, причем в способе по меньшей мере одна поверхность, вырабатывающая большую подъемную силу, которая приводится местным механическим оконечным управляющим элементом в соответствии с управляющим сигналом, вырабатываемым управляющим устройством, устанавливается в заранее определенное положение центральным приводным устройством, которое соединено с помощью вращающегося вала с местным оконечным управляющим элементом, и при этом вращающий момент, создаваемый центральным приводным устройством, передается на вращающийся вал. В соответствии с изобретением, если регистрируется сигнал, указывающий на заклинивание в системе поверхностей, создающих большую подъемную силу, то вращающий момент, передаваемый центральным приводным устройством на вращающийся вал, автоматически снижается до заданного нижнего значения, и положение системы поверхностей, создающих большую подъемную силу, фиксируется.
Сигнал, который указывает на возникновение заклинивания, может быть получен путем накопления сигнала, который представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством на вращающийся вал, за определенный временной интервал.
В качестве альтернативного варианта сигнал, который указывает на возникновение заклинивания, может быть получен путем регистрации сигнала, который представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством на вращающийся вал в связи с возникновением управляющего сигнала, введенного пилотом для включения изменения направления вращения вращающегося вала.
В соответствии с предпочтительным вариантом осуществления изобретения сигнал, указывающий на возникновение заклинивания, может быть получен путем сравнения сигналов, вырабатываемых датчиками положения, имеющимися в системе поверхностей, создающих большую подъемную силу, причем эти сигналы представляют собой действительное положение указанных поверхностей, с сигналами, которые определяются заранее в соответствии с алгоритмом обработки в управляющем устройстве и представляют заданное положение поверхностей, создающих большую подъемную силу. Преимуществом такого варианта является то, что сигналы, которые представляют действительное положение поверхностей, создающих большую подъемную силу, могут быть получены с помощью датчиков положения, реагирующих на асимметрию, которые имеются на концах вращающихся валов. Возникновение максимального угла поворотного диска аксиального гидромотора может быть интерпретировано как сигнал, представляющий заданное верхнее значение вращающего момента.
Может использоваться альтернативный вариант, в котором возникновение максимального тока электродвигателя, входящего в состав центрального приводного устройства, может быть интерпретировано как сигнал, представляющий заданное верхнее значение вращающего момента.
Заданное нижнее значение вращающего момента, передаваемого центральным приводным устройством на вращающийся вал, при котором фиксируется положение системы поверхностей, создающих большую подъемную силу, предпочтительно устанавливается так, чтобы поверхности, создающие большую подъемную силу, были предохранены от самопроизвольной уборки под действием внешних аэродинамических нагрузок.
Заданное нижнее значение вращающего момента предпочтительно устанавливается таким образом, чтобы оно было ниже порога срабатывания ограничителя вращающего момента, который входит в состав вращающегося вала системы поверхностей, создающих большую подъемную силу.
В соответствии с предпочтительным вариантом осуществления предлагаемого в изобретении способа фиксация положения системы поверхностей, создающих большую подъемную силу, осуществляется путем включения тормозного устройства, блокирующего двигатель, которое входит в состав центрального приводного устройства.
В соответствии с предпочтительным вариантом осуществления предлагаемого в изобретении способа после регистрации сигнала, указывающего на возникновение заклинивания, вырабатывается запрос для пилота на выдачу управляющего сигнала, который вызывает изменение направления вращения вращающегося вала.
Кроме того, в изобретении предлагается устройство для обеспечения автоматического снижения нагрузки на систему поверхностей, создающих большую подъемную силу, в частности на систему посадочных закрылков летательного аппарата, в случае заклинивания, причем в указанном устройстве по меньшей мере одна поверхность, вырабатывающая большую подъемную силу, которая приводится местным механическим оконечным управляющим элементом в соответствии с управляющим сигналом, вырабатываемым управляющим устройством, регулируется центральным приводным устройством, которое соединено с помощью вращающегося вала с местным оконечным управляющим элементом, и при этом вращающий момент, создаваемый центральным приводным устройством, передается на вращающийся вал.
В соответствии с изобретением устройство снабжено управляющим устройством, которое при регистрации сигнала, указывающего на заклинивание внутри системы поверхностей, создающих большую подъемную силу, передает в центральное приводное устройство сигнал, который автоматически снижает вращающий момент, передаваемый центральным приводным устройством на вращающийся вал, до заданного нижнего значения вращающего момента, и передает сигнал в запирающее устройство, в результате чего обеспечивается фиксация положения системы поверхностей, создающих большую подъемную силу.
В соответствии с вариантом осуществления изобретения используется управляющее устройство для обработки сигнала, оцениваемого как сигнал индикации заклинивания, который накапливается в течение заданного временного интервала и представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством на вращающийся вал.
В соответствии с другим вариантом осуществления изобретения используется управляющее устройство для обработки сигнала, оцениваемого как сигнал индикации заклинивания, который представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством на вращающийся вал в связи с возникновением управляющего сигнала, введенного пилотом для включения изменения направления вращения вращающегося вала.
В соответствии с предпочтительным вариантом осуществления изобретения используется управляющее устройство, в котором сигнал, указывающий на возникновение заклинивания, может быть получен путем сравнения сигналов, вырабатываемых датчиками положения, имеющимися в системе поверхностей, создающих большую подъемную силу, причем эти сигналы представляют собой действительное положение указанных поверхностей, с сигналами, которые определяют заранее в соответствии с алгоритмом обработки в управляющем устройстве и которые представляют заданное положение поверхностей, создающих большую подъемную силу.
Преимуществом такого варианта является то, что сигналы, которые представляют действительное положение поверхностей, создающих большую подъемную силу, снимаются с датчиков положения, реагирующих на асимметрию, которые имеются на концах вращающихся валов.
Обнаружение возникновения максимального угла поворотного диска гидравлического сервомотора с наклонным валом, входящего в состав центрального приводного устройства, может быть использовано в качестве сигнала, представляющего заданное верхнее значение вращающего момента.
Может использоваться альтернативный вариант, в котором обнаружение возникновения максимального тока электродвигателя, входящего в состав центрального приводного устройства, может быть интерпретировано как сигнал, представляющий заданное верхнее значение вращающего момента.
Заданное нижнее значение вращающего момента, передаваемого центральным приводным устройством на вращающийся вал, при котором фиксируется положение системы поверхностей, создающих большую подъемную силу, предпочтительно устанавливается так, чтобы поверхности, создающие большую подъемную силу, были предохранены от самопроизвольной уборки под действием внешних аэродинамических нагрузок.
Заданное нижнее значение вращающего момента предпочтительно устанавливается таким образом, чтобы оно было ниже порога срабатывания ограничителя вращающего момента, который входит в состав вращающегося вала системы поверхностей, создающих большую подъемную силу.
В соответствии с предпочтительным вариантом осуществления изобретения для фиксации положения системы поверхностей, создающих большую подъемную силу, предлагается использовать тормозное устройство, блокирующее двигатель, которое входит в состав центрального приводного устройства.
В соответствии с предпочтительным вариантом осуществления изобретения после регистрации сигнала, указывающего на возникновение заклинивания, вырабатывается запрос для пилота на выдачу управляющего сигнала, который вызывает изменение направления вращения вращающегося вала.
Вариант осуществления изобретения описывается ниже со ссылками на чертежи.
На чертежах показано:
Фигура 1 - вид в перспективе летательного аппарата, снабженного системой поверхностей, создающих высокую подъемную силу, в форме системы отклоняемых носков крыльев, размещенной в передней части крыльев, и системы посадочных закрылков, размещенной в задней части крыльев, в соответствии с вариантом осуществления изобретения.
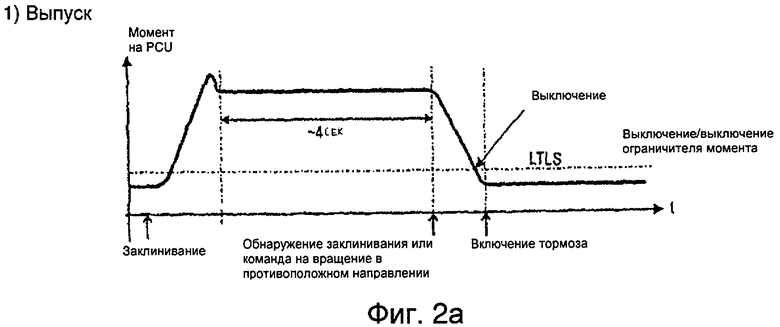
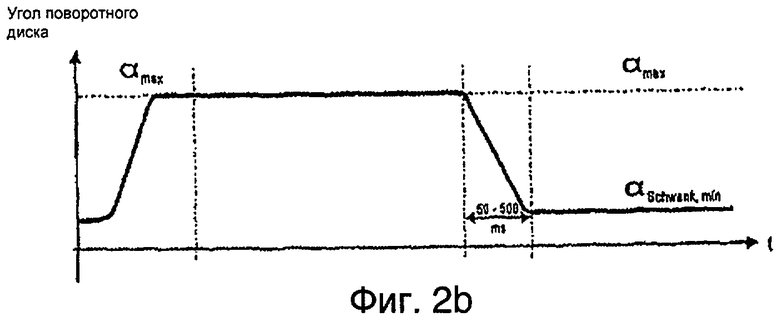
Фигуры 2а и 2b - графики изменения по времени вращающего момента центрального приводного устройства, обеспечиваемого в системе поверхностей, создающих большую подъемную силу, или угла поворота поворотного диска гидромотора с наклонным валом, используемого в таком центральном приводном устройстве в случае заклинивания, при выпуске системы поверхностей, создающих большую подъемную силу, со снижением скручивающих усилий в соответствии с вариантом осуществления изобретения.
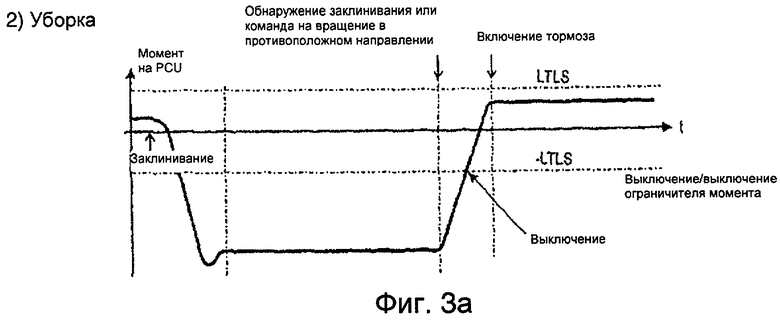
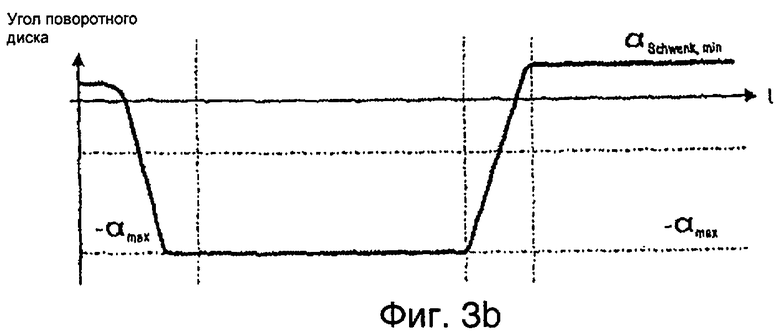
Фигуры 3а и 3b - графики изменения по времени вращающего момента центрального приводного устройства, обеспечиваемого в системе поверхностей, создающих большую подъемную силу, или угла поворота поворотного диска гидромотора с наклонным валом, используемого в таком центральном приводном устройстве в случае заклинивания, при уборке системы поверхностей, создающих большую подъемную силу, со снижением скручивающих усилий в соответствии с вариантом осуществления изобретения.
На фигуре 1 представлен вид в перспективе современного самолета гражданской авиации, в котором используется система поверхностей, создающих большую подъемную силу, в соответствии с одним из вариантов изобретения. Система поверхностей, создающих большую подъемную силу, содержит отклоняемые носки 11, 12 крыльев, размещенные на передних кромках крыльев, и посадочные закрылки 21, размещенные на задних кромках крыльев.
Для привода отклоняемых носков 11, 12 крыльев используется передний вращающийся вал 15, который размещен вдоль передней кромки крыла, так чтобы он проходил в основном в направлении размаха крыла; а для привода посадочных закрылков 21 используется задний вращающийся вал 25, размещенный на задней кромке крыла, так чтобы он также проходил в основном в направлении размаха крыла. Для каждого из двух крыльев самолета обеспечивается один такой передний вращающийся вал 15 и один такой задний вращающийся вал 25 соответственно, причем на фигуре 1 показаны только вращающиеся валы 15, 25 для одного крыла. Передние вращающиеся валы обоих крыльев приводятся совместно центральным приводным устройством 13 через Т-образную раздаточную коробку 14, в то время как задние вращающиеся валы 25 обоих крыльев приводятся аналогичным образом центральным приводным устройством 23 через Т-образную раздаточную коробку 24. В рассматриваемом варианте центральное приводное устройство 13 передних вращающихся валов 15, предназначенное для привода отклоняемых носков крыльев, содержит гидромотор с наклонным валом и электродвигатель с электронным регулятором, обеспечивающий движущую силу (двигатели на фигуре не показаны). Для управления электродвигателем используется электронный регулятор 35. Центральное приводное устройство 23 задних вращающихся валов 25, предназначенных для привода посадочных закрылков 21, содержит два гидравлических двигателя с наклонными валами (двигатели также на фигуре не показаны). Посредством центральных приводных устройств 13, 23 вращающиеся валы 15, 25 вращаются в одном или в другом направлении с помощью Т-образных раздаточных коробок 14, 24 для выпуска или уборки поверхностей, создающих большую подъемную силу, то есть отклоняемых носков 11, 12 крыльев и посадочных закрылков 21.
Поверхности, создающие большую подъемную силу, снабжены местными оконечными управляющими элементами, а именно отклоняемые носки 11, 12 крыльев снабжены местными механическим управляющими элементами 16, и посадочные закрылки 21 снабжены местными механическими оконечными управляющими элементами 26, которые преобразуют вращательное движение вращающихся валов 15, 25 в перемещение выпуска или уборки указанных поверхностей, создающих большую подъемную силу. В качестве таких местных оконечных управляющих элементов 16, 26 могут использоваться, например, шпиндельные или кривошипные механизмы.
Возле концов вращающихся валов 15, 25 установлены тормоза 17 или 27, которые используются для фиксации положения соответствующего вращающегося вала на стороне привода в последнем положении, которое он занимал при возникновении неисправности, которая маловероятна, однако не может быть вообще исключена, так что может быть предотвращена самопроизвольная уборка поверхностей, создающих большую подъемную силу, под действием аэродинамических нагрузок.
Наконец, на концах вращающихся валов 15, 25 установлены соответствующие датчики 18, 28 положения, реагирующие на асимметрию, которые при рассогласовании угловых положений концов вращающихся валов 15 обоих крыльев вырабатывают соответствующий сигнал; аналогичные устройства используются для вращающихся валов 25 обоих крыльев.
Управление центральными приводными устройствами 13, 23 и, соответственно, отклоняемыми носками 11, 12 или посадочными закрылками 21, приводимыми центральными приводными устройствами 13, 23 осуществляется с помощью управляющего устройства 31, 32 в форме компьютеров управления поверхностями, создающими большую подъемную силу. Ввод команды в управляющее устройство 31, 32 осуществляется пилотом, например, с помощью рычага 33 привода закрылков.
Далее, каждое из центральных приводных устройств 13, 23 содержит блокирующее тормозное устройство, не показанное отдельно на фигуре, с помощью которого может быть зафиксировано положение соответствующего силового управляющего устройства 13, 23 в некоторый момент времени. Кроме того, если смотреть в направлении передачи вращательного движения, на переднем конце каждого вращающегося вала 15, 25 установлен механический ограничитель момента, с помощью которого очень большой момент, развиваемый соответствующим центральным приводным устройством 13, 23, ограничивается до величины, допустимой для соответствующего вращающегося вала 15, 25.
Гидравлические двигатели с наклонным валом, входящие в состав центральных приводных устройств 13, 23, содержат регулируемый поворотный диск, с помощью которого момент Mmot двигателя устанавливается пропорционально углу αSchwenk установки поворотного диска двигателя. Кроме того, центральное приводное устройство 13 снабжено уже упоминавшимся регулируемым электродвигателем, в котором обеспечивается пропорциональность момента двигателя командному току isoll. Если система вращающихся валов блокируется, то есть возникает заклинивание в одном из вращающихся валов 15, 25, то момент двигателя увеличивается от стационарной рабочей величины до максимального момента заторможенного двигателя. В случае гидравлического серводвигателя это происходит в результате увеличения (за счет регулирования) угла поворотного диска до максимальной величины αSchwenk, мах или же в случае электродвигателя это происходит в результате увеличения (за счет регулирования) командного тока ison до максимальной величины isoll, max. В ответ на соответствующие управляющие сигналы, вырабатываемые управляющим устройством 31, 32, и посредством выработки момента, который передается центральным приводным устройством 13, 23 на вращающийся вал 15, 25, система поверхностей, создающих большую подъемную силу, которая формируется отклоняемыми носками 11, 12 передних кромок крыльев или посадочными закрылками 21, соответственно, переводится в нужное заранее определенное положение.
Когда в системе поверхностей, создающих большую подъемную силу, обнаруживается заклинивание, момент, вырабатываемый центральным приводным устройством 13, 23, автоматически снижается до определенной небольшой величины, и система поверхностей, создающих большую подъемную силу, фиксируется в ее текущем положении. Такое заклинивание происходит большей частью в механизме вращающегося вала 15, 25 или в оконечных управляющих элементах 16, 26, связанных с поверхностями 11, 12, 21, создающими большую подъемную силу, и в результате вращающийся вал подвергается скручивающему напряжению между местом заклинивания и приводным двигателем центрального приводного устройства 13, 23, до тех пор пока не будет достигнут момент заторможенного двигателя. Если не снижать нагрузку, то возникшая ситуация чревата вышеописанными неблагоприятными последствиями.
В настоящем изобретении для указанного снижения нагрузки в случае заклинивания используются компоненты и датчики, имеющиеся в системе поверхностей, создающих большую подъемную силу.
В рассматриваемом варианте осуществления изобретения сигнал, указывающий на возникшее заклинивание, получают в результате сравнения сигналов, которые вырабатываются датчиками 18, 28 положения, реагирующими на асимметрию, которые находятся на концах вращающихся валов системы поверхностей 11, 12, 21, вырабатывающих большую подъемную силу, и представляют фактическое положение указанных поверхностей, с сигналами, которые представляют заданное положение поверхностей 11, 12, 21 и определяются в соответствии с алгоритмом расчета в управляющем устройстве 31, 32.
В качестве альтернативного варианта сигнал, указывающий на возникновение заклинивания, может быть получен путем накопления за определенный интервал времени сигнала, представляющего заданную верхнюю величину вращающего момента, передаваемого центральным приводным устройством 13, 23 на вращающийся вал 15, 25, которая возникает только в случае заклинивания.
Кроме того, такой сигнал может быть получен путем регистрации сигнала, представляющего заданное верхнее значение вращающего момента, которое может возникнуть только в случае заклинивания, в связи с возникновением управляющего сигнала, введенного пилотом для включения изменения направления вращения вращающегося вала 15, 25. Этот вариант применим в том случае, когда возникновение заклинивания в системе поверхностей, создающих большую подъемную силу, немедленно обнаруживается пилотом, и он предпринимает соответствующее парирующее управляющее воздействие. Сигнал, представляющий верхнюю величину вращающего момента, указывающую на то, что возникло заклинивание, может быть получен из максимального угла αSchwenk, max в случае гидравлического серводвигателя с наклонным валом, или по максимальному командному току isoll, max в случае электродвигателя.
Управляющее устройство 31, 32 после регистрации сигнала, указывающего на возникновение заклинивания, вырабатывает запрос для пилота на выдачу управляющего сигнала, который вызывает изменение направления вращения вращающегося вала 15, 25. Заданная нижняя величина вращающего момента, к которой затем возвращается вращающий момент на вращающемся валу 15, 25, и положение, в котором затем устанавливается система поверхностей, создающих большую подъемную силу, устанавливается такой, чтобы, с одной стороны, вращающий момент был ниже величины срабатывания ограничителя вращающего момента, которым снабжен вращающийся вал 15, 25, и, с другой стороны, поверхности 11, 12, 21 были защищены от любой самопроизвольной уборки под действием внешних аэродинамических нагрузок. В рассматриваемом варианте осуществления изобретения фиксация положения системы поверхностей, создающих большую подъемную силу, происходит путем включения тормозного устройства, блокирующего двигатель, которое входит в состав центрального приводного устройства 13, 23.
На фигурах 2а и 2b представлены графики изменения во времени вращающего момента центрального приводного устройства (PCU) 13, 23, то есть вращающего момента, передаваемого центральным приводным устройством 13, 23 на вращающийся вал 15, 25 посредством Т-образной раздаточной коробки 14, 24, а также угла αSchwenk поворота диска гидравлического серводвигателя с наклонным валом, входящего в состав центрального приводного устройства 13, 23. Когда в момент времени, отмеченный на фигуре 2а стрелкой, происходит заклинивание, вращающий момент увеличивается до максимальной величины, которая обусловливается увеличением угла αSchwenk поворотного диска до максимальной величины αmах. После заданного интервала времени, который в настоящем примере составляет 4 секунды, заклинивание считается обнаруженным, и центральным управляющим устройством 13, 23 вырабатывается соответствующая команда на вращение в обратном направлении. В качестве альтернативного варианта в этой временной точке пилот вводит команду на изменение направления вращения привода. В течение последующего краткого временного интервала угол поворотного диска регулируемым образом отрабатывается от максимальной величины αmах до заданной нижней величины αSchwenk, max и, таким образом, осуществляется пропорциональное снижение вращающего момента электродвигателя и скручивающего момента, действующего на вращающийся вал 15, 25. Величина этого сниженного скручивающего момента ниже порогового значения LTLS, который показан на фигуре 2а штрихпунктирной линией, которая соответствует включению/выключению уже упоминавшегося ограничителя вращающего момента. Как уже отмечалось, минимальный угол αSchwenk, min выбирается таким образом, чтобы, с одной стороны, механический ограничитель момента (если таковой имеется) снова выключался, и, с другой стороны, обеспечивался достаточный момент, противодействующий внешним аэродинамическим нагрузкам. Сразу же после достижения минимального угла поворотного диска включается тормозное устройство, блокирующее двигатель, которое обычно является стандартным оборудованием. Таким образом, завершается процесс снижения нагрузки, и скручивающий момент, действующий на вращающийся вал 15, 25, снижается до необходимого уровня, и с этого значения момента может быть осуществлен новый пуск для устранения заклинивания.
На фигурах 3а и 3b приведены соответствующие графики изменения по времени вращающего момента и угла поворотного диска, когда заклинивание возникает при уборке поверхностей, создающих большую подъемную силу. В момент времени, указанный на фигуре 3а стрелкой, происходит заклинивание, так что вращающий момент центрального приводного устройства 13, 23 в направлении движения уборки поверхностей увеличивается до его максимальной величины, что происходит в результате увеличения угла поворотного диска гидравлического серводвигателя до величины αmах. Снова, как и в случае графиков, приведенных на фигуре 2, заклинивание считается зафиксированным после прохождения определенного временного интервала, в данном случае 4 секунд, или после выдачи команды на начало привода в противоположном направлении. В течение короткого временного интервала угол поворотного диска уменьшается от максимальной величины αmах, и после пересечения нулевого значения этот угол поворотного диска отрабатывается до заданной минимальной величины αSchwenk, min. Эта минимальная величина, в свою очередь, выбирается таким образом, чтобы она была ниже порогового значения LTLS для включения/выключения ограничителя вращающего момента и противодействовала внешним аэродинамическим нагрузкам, так чтобы надежно предотвращалась самопроизвольная уборка поверхностей, создающих большую подъемную силу. При этом минимальном значении угла αSchwenk, min поворотного диска снова включается тормозное устройство, блокирующее двигатель. Таким образом, завершается процесс снижения нагрузки, и скручивающий момент, действующий на вращающийся вал 15, 25, снижается до минимума, и с этого низкого значения момента может быть осуществлен новый пуск для устранения заклинивания.
В результате снижения в соответствии с изобретением нагрузки, действующей на вращающийся вал, во всех случаях, когда возникает заклинивание, высокий скручивающий момент, действующий на систему вращающихся валов, снижается до безопасного минимума после непродолжительного периода времени. Соответственно, снижается нагрузка, действующая на все задействованные механические компоненты. Это особенно эффективно в том случае, когда заклинивание присутствует постоянно, и если даже после нескольких попыток запуска центрального приводного электродвигателя в противоположном направлении невозможно освободить систему. Снижение нагрузки обеспечивает возможность достижения оптимизации веса в системе вращающихся валов, при поддержании максимально возможной надежности и безопасности.
Изобретение относится к области аэродинамики. Способ заключается в обеспечении автоматического снижения нагрузки на систему поверхностей, создающих большую подъемную силу при возникновении заклинивания. В устройстве, по меньшей мере, одна поверхность вырабатывает большую подъемную силу, которая приводится местным механическим оконечным управляющим элементом в соответствии с управляющим сигналом, вырабатываемым управляющим устройством, устанавливается в заранее определенное положение центральным приводным устройством, которое соединено с помощью вращающегося вала с местным оконечным управляющим элементом для передачи вращающего момента, создаваемого центральным приводным устройством, на вращающийся вал. Если регистрируется сигнал, указывающий на возникновение заклинивания в системе поверхностей, создающих большую подъемную силу, то вращающий момент, передаваемый центральным приводным устройством на вращающийся вал, автоматически снижается до заданного нижнего значения, и положение системы поверхностей, создающих большую подъемную силу, фиксируется. Обеспечивается автоматическое снижение нагрузки на систему несущих поверхностей. 2 н. и 18 з.п. ф-лы, 5 ил.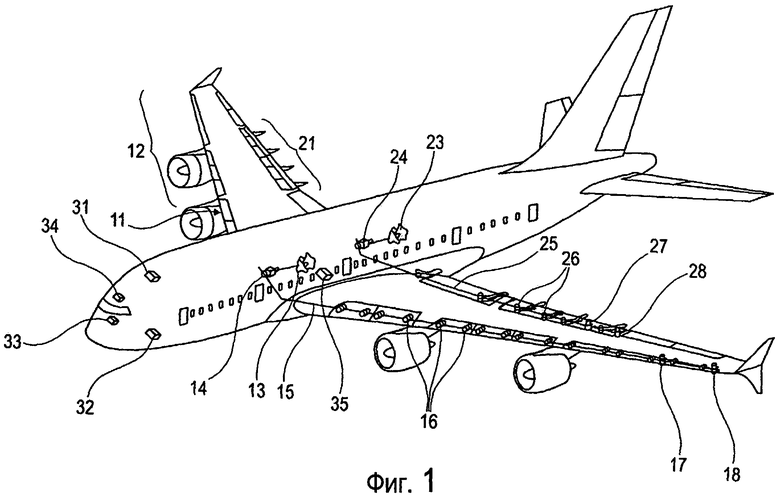
1. Способ обеспечения автоматического снижения нагрузки на систему поверхностей, создающих большую подъемную силу, в частности на систему посадочных закрылков летательного аппарата, при возникновении заклинивания, заключающийся в том, что в ответ на управляющий сигнал, вырабатываемый управляющим устройством (31, 32, 35), по меньшей мере одна поверхность (11, 12, 21), создающая большую подъемную силу, которая приводится местным механическим оконечным управляющим элементом (16, 26), устанавливается в заданное положение центральным приводным устройством (13, 23), которое соединено с местным оконечным управляющим элементом (16, 26) посредством вращающегося вала (15, 25), и если регистрируется сигнал, который указывает на наличие заклинивания внутри системы поверхностей, создающих большую подъемную силу, вращающий момент, передаваемый центральным приводным устройством (13, 23) на вращающийся вал (15, 25), автоматически снижается до заданного нижнего значения, и положение системы поверхностей, создающих большую подъемную силу, фиксируется, при этом заданное нижнее значение вращающего момента центрального приводного устройства (13, 23), передаваемого на вращающийся вал (15, 25), при которой фиксируется система поверхностей, создающих большую подъемную силу, устанавливается таким образом, чтобы поверхности (11, 12, 21), создающие большую подъемную силу, были предохранены от любой самопроизвольной уборки под действием внешних аэродинамических нагрузок.
2. Способ по п.1, в котором сигнал, указывающий на наличие заклинивания, получают путем накопления сигнала, который представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством (13, 23) на вращающийся вал (15, 25), за определенный временной интервал.
3. Способ по п.1, в котором сигнал, указывающий на наличие заклинивания, получают путем регистрации сигнала, который представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством (13, 23) на вращающийся вал (15, 25) в связи с возникновением управляющего сигнала, введенного пилотом для включения изменения направления вращения вращающегося вала (15, 25).
4. Способ по п.1, в котором сигнал, указывающий на наличие заклинивания, получают сравнением сигналов, вырабатываемых датчиками положения, имеющимися в системе поверхностей, создающих большую подъемную силу, причем эти сигналы представляют собой действительное положение поверхностей (11, 12, 21), создающих большую подъемную силу, с сигналами, которые определяют заранее в соответствии с алгоритмом расчета в управляющем устройстве (31, 32) и которые представляют заданное положение поверхностей (11, 12, 21), создающих большую подъемную силу.
5. Способ по п.4, в котором сигналы, представляющие действительное положение поверхностей (11, 12, 21), создающих большую подъемную силу, снимают с датчиков положения (18, 28), реагирующих на асимметрию, которые находятся на концах вращающихся валов.
6. Способ по п.2 или 3, в котором возникновение максимального угла поворотного диска гидромотора с наклонным валом, входящего в состав центрального приводного устройства (13, 23), воспринимается как сигнал, представляющий заданное верхнее значение вращающего момента.
7. Способ по п.2 или 3, в котором возникновение максимального тока электродвигателя, входящего в центральное приводное устройство (13, 23), воспринимается как сигнал, представляющий заданное верхнее значение вращающего момента.
8. Способ по п.1, в котором заданное нижнее значение вращающего момента устанавливается таким образом, чтобы оно было ниже величины срабатывания ограничителя вращающего момента, который находится на вращающемся валу (15, 25) системы поверхностей, создающих большую подъемную силу.
9. Способ по п.1, в котором фиксация положения системы поверхностей, создающих большую подъемную силу, осуществляется путем включения тормозного устройства, блокирующего двигатель, которое входит в состав центрального приводного устройства (13, 23).
10. Способ по п.1, в котором после регистрации сигнала, указывающего на возникновение заклинивания, вырабатывается запрос для пилота на выдачу управляющего сигнала, который приводит к изменению направления вращения вращающегося вала (15, 25).
11. Устройство обеспечения автоматического снижения нагрузки на систему поверхностей, создающих большую подъемную силу, в частности на систему посадочных закрылков летательного аппарата, при возникновении заклинивания, причем устройство содержит по меньшей мере одну поверхность (11, 12, 21), создающую большую подъемную силу, которая приводится местным механическим оконечным управляющим элементом (16, 26) и регулируется в соответствии с управляющим сигналом, вырабатываемым управляющим устройством (31, 32, 35), центральным приводным устройством (13, 23), которое соединено с помощью вращающегося вала (15, 25) с местным оконечным управляющим элементом (16, 26) с передачей вращающего момента, создаваемого центральным приводным устройством (13, 23), на вращающийся вал (15, 25), и устройство снабжено управляющим устройством (31, 32, 35), которое при регистрации сигнала, который указывает на наличие заклинивания внутри системы поверхностей, создающих большую подъемную силу, передает в центральное приводное устройство (13, 23) сигнал, который автоматически снижает вращающий момент, передаваемый центральным приводным устройством (13, 23) на вращающийся вал (15, 25), до заданного нижнего значения, а также передает сигнал в тормозное устройство для обеспечения фиксации положения системы поверхностей, создающих большую подъемную силу, при этом заданное нижнее значение вращающего момента центрального приводного устройства (13, 23), передаваемого на вращающийся вал (15, 25), при котором фиксируется система поверхностей, создающих большую подъемную силу, устанавливается таким образом, чтобы поверхности (11, 12, 21), создающие большую подъемную силу, были предохранены от любой самопроизвольной уборки под действием внешних аэродинамических нагрузок.
12. Устройство по п.11, в котором управляющее устройство (31, 32) предназначено для обработки сигнала, оцениваемого как сигнал индикации заклинивания, который накапливается в течение заданного временного интервала и представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством (13, 23) на вращающийся вал (15, 25).
13. Устройство по п.11, в котором управляющее устройство (31, 32) предназначено для обработки сигнала, оцениваемого как сигнал индикации заклинивания, который представляет собой заданное верхнее значение вращающего момента, передаваемого центральным приводным устройством (13, 23) на вращающийся вал (15, 25) в связи с возникновением управляющего сигнала, введенного пилотом для включения изменения направления вращения вращающегося вала (15, 25).
14. Устройство по п.11, в котором управляющее устройство (31, 32) предназначено для получения сигнала, указывающего на возникновение заклинивания, путем сравнения сигналов, вырабатываемых датчиками положения, входящими в состав системы поверхностей, создающих большую подъемную силу, причем эти сигналы представляют собой действительное положение поверхностей (11, 12, 21), создающих большую подъемную силу, с сигналами, которые заранее определяют в соответствии с алгоритмом обработки в управляющем устройстве (31, 32) и которые представляют заданное положение поверхностей (11, 12, 21), создающих большую подъемную силу.
15. Устройство по п.14, в котором сигналы, представляющие действительное положение поверхностей (11, 12, 21), создающих большую подъемную силу, снимают с датчиков положения (18, 28), реагирующих на асимметрию, которые находятся на концах вращающихся валов.
16. Устройство по п.12 или 13, в котором возникновение максимального угла поворотного диска гидромотора с наклонным валом, входящего в состав центрального приводного устройства (13, 23), воспринимается как сигнал, представляющий заданное верхнее значение вращающего момента.
17. Устройство по п.12 или 13, в котором возникновение максимального тока электродвигателя, входящего в состава центрального приводного устройства (13, 23), воспринимается как сигнал, представляющий заданное верхнее значение вращающего момента.
18. Устройство по п.11, в котором заданное нижнее значение вращающего момента устанавливается таким образом, чтобы оно было ниже величины срабатывания ограничителя вращающего момента, который находится на вращающемся валу (15, 25) системы поверхностей, создающих большую подъемную силу.
19. Устройство по п.11, в котором центральное приводное устройство (13, 23) снабжено тормозным устройством, блокирующим двигатель, для фиксации положения системы поверхностей, создающих большую подъемную силу.
20. Устройство по п.11, в котором управляющее устройство (31, 32) после регистрации сигнала, указывающего на возникновение заклинивания, вырабатывает запрос для пилота на выдачу управляющего сигнала, который вызывает изменение направления вращения вращающегося вала (15,25).
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Развертывающий преобразователь сопротивления в частоту импульсов | 1986 |
|
SU1310848A1 |
| US 4971267 А, 20.11.1990 | |||
| GB 1591799 А, 24.06.1981 | |||
| Механизм привода концевых выключателей подвижного агрегата самолета | 1977 |
|
SU671180A1 |
| RU 2000250 С, 07.09.1993 | |||
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ВАЛА ДАТЧИКА С ПОВОРОТНЫМ ЭЛЕМЕНТОМ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА | 1993 |
|
RU2068798C1 |
| СИСТЕМА УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 1991 |
|
RU2071440C1 |

