Область техники
Настоящее изобретение относится к технической области медицинского устройства и, более конкретно, к хирургической роботизированной системе и ее хирургическому инструменту.
Уровень техники
Малоинвазивную хирургию одобряет все большее количество пациентов из-за ее преимуществ небольших ран и быстрого восстановления, и все больше хирургических режимов применяют в малоинвазивных операциях, постепенно вырастающих из традиционной открытой хирургии. В то же время непрерывное развитие хирургических методов также значительно способствовало развитию и прогрессу соответствующих хирургических устройств. Ранние портативные хирургические устройства постоянно заменялись механизированными и интеллектуальными хирургическими устройствами. Будучи самым передовым хирургическим устройством в современную эпоху хирургические роботизированные системы постоянно влияют на медицинские идеи людей, и постоянно появляются разные малоинвазивные хирургические роботизированные системы с различными функциями.
В малоинвазивной хирургии лапароскопическая хирургия была популярна преимущественно из-за ее ранней реализации. Среди существующих лапароскопических хирургических роботизированных систем система «DaVinci» признана одной из самых выдающихся в мире, и использование системы «DaVinci» почти полностью охватывает Европу и Америку, что отражает ее абсолютные преимущества. Основной концепцией управления хирургической роботизированной системой «DaVinci» является режим дистанционного управления «ведущий-ведомый». Врач управляет хирургическими инструментами прикроватного робота через ведущий манипулятор главного пульта. В общем случае прикроватный робот имеет любое количество роботизированных рук, способных держать хирургические инструменты и эндоскоп. Однако хирургические инструменты хирургической роботизированной системы отличаются от традиционных хирургических инструментов, и они имеют более автоматические и интеллектуальные особенности.
Хирургические инструменты хирургической роботизированной системы обычно имеют четыре степени свободы: вращение, поворот, наклон и открытие/закрытие, так что они могут наилучшим образом воспроизводить действие человеческих рук. Когда врач управляет роботом, операции хирургического инструмента похожи на операции, выполняемые собственными руками врача. Кроме того, хирургические инструменты являются более гибкими, чем человеческие руки, и могут выполнять операции, которые руки человека делать не в состоянии. Однако хирургические инструменты в таких системах, как известно заявителю, все еще страдают рядом недостатков, основными из которых являются следующие.
(1) Некоторые существующие хирургические роботы лишены механизмов тактильной обратной связи, оставляя хирургические инструменты неспособными к обратной связи их рабочего окружения и статуса с врачом во время операции. Следовательно, врач не может воспринимать какое-либо помехи в работу хирургических инструментов вне поля зрения, или любой из хирургических инструментов соприкасается с определенной тканью тела, но врач не осознает этого, что может вызвать нарушение в работе. Это сильно влияет на самочувствие врача во время манипуляции и исход операции или даже приведет к ее срыву.
(2) Хотя некоторые хирургические роботы включают механизм тактильной обратной связи, структура механизма тактильной обратной связи является сложной. Например, хирургический робот с механизмом тактильной обратной связи, раскрытый в китайской патентной публикации CN 101340850 A, снабжен множеством тензометрических датчиков, расположенных снаружи дистального конца вала, соединенного с концевым эффектором, для обнаружения деформации, параллельной продольной оси вала, а затем соответствующие силы могут быть рассчитаны на основании деформации. Вышеуказанный хирургический робот использует структуру непрямой тактильной обратной связи для реализации механизма тактильной обратной связи хирургического инструмента. Сами тензометрические датчики непосредственно не связаны или не находятся в контакте с концевым эффектором. Более сложный алгоритм необходим для преобразования деформации, измеряемой тензометрическим датчиком, в силы, приложенные к хирургическим инструментам, и точность измерения механизма непрямой тактильной обратной связи относительно низка, что не соответствует конструктивному назначению хирургических инструментов для хирургических роботов.
Сущность изобретения
Цель некоторых вариантов осуществления настоящей заявки состоит в том, чтобы преодолеть, по меньшей мере, одну из проблем традиционных механизмов измерения силы контакта, действующей на концевую часть хирургического инструмента, таких как сложность конструкции, сложность вычислений и низкая точность, предлагая хирургическую роботизированную систему и ее хирургический инструмент.
В соответствии с аспектом настоящей заявки предложен хирургический инструмент, содержащий механический конструктивный узел и узел датчика давления, при этом:
механический конструктивный узел содержит вал инструмента и концевой эффектор; вал инструмента содержит корпус и соединительную часть, проходящую от дистального конца корпуса; соединительная часть содержит первый соединитель и второй соединитель, которые распределены радиально; первый соединитель жестко соединен с корпусом вала инструмента, и второй соединитель жестко присоединен к концевому эффектору;
узел датчика давления содержит чувствительный элемент, расположенный между первым соединителем и вторым соединителем, и чувствительный элемент выполнен с возможностью воспринимать силу, создаваемую соединительной частью на чувствительном элементе, для определения силы в декартовых координатах, получаемую концевым эффектором.
Необязательно, первый соединитель представляет собой полый опорный вал, второй соединитель представляет собой полое основание, основание образовано из осевого удлинения проксимального конца концевого эффектора, и основание выполнено с возможностью скрепления с опорным валом.
Необязательно, первый соединитель представляет собой структуру внешнего слоя, второй соединитель представляет собой структуру внутреннего слоя, структура внешнего слоя радиально соединена со структурой внутреннего слоя, образуя канавку, в которой расположен чувствительный элемент.
Необязательно канавка имеет U-образное осевое сечение.
Необязательно размер наружной поверхности первого соединителя меньше, чем размер внутренней поверхности второго соединителя; и
размер внутренней поверхности второго соединителя меньше, чем сумма размера наружной поверхности первого соединителя и радиального размера чувствительного элемента.
Необязательно размер внутренней поверхности второго соединителя больше, чем сумма размера наружной поверхности первого соединителя и радиального размера чувствительного элемента, и прокладка расположена между первым соединителем и вторым соединителем для повышения эластичности между первым соединителем и вторым соединителем.
Необязательно размер внутренней поверхности первого соединителя больше, чем размер наружной поверхности второго соединителя, и
размер внутренней поверхности первого соединителя меньше, чем сумма размера наружной поверхности второго соединителя и радиального размера чувствительного элемента.
Необязательно размер внутренней поверхности первого соединителя больше, чем сумма размера наружной поверхности второго соединителя и радиального размера чувствительного элемента, и прокладка расположена между первым соединителем и вторым соединителем для повышения эластичности между первым соединителем и вторым соединителем.
Необязательно прокладка выполнена из каучука или силикона.
Необязательно узел датчика давления содержит один чувствительный элемент или содержит множество чувствительных элементов, и множество чувствительных элементов распределены вдоль направления по окружности и/или направления по оси хирургического инструмента.
Необязательно множество чувствительных элементов распределены на множество рядов в направлении по окружности хирургического инструмента, и чувствительные элементы в каждом из рядов равномерно распределены в направлении по окружности хирургического инструмента.
Необязательно каждый из рядов чувствительных элементов расположен в шахматном порядке с соседним рядом из рядов чувствительных элементов.
В соответствии с другим аспектом настоящей заявки предложена хирургическая роботизированная система, содержащая ведомое устройство, содержащее:
роботизированную руку и хирургический инструмент;
причем роботизированная рука имеет концевую часть, соединенную с возможностью отсоединения с хирургическим инструментом, и выполнена с возможностью приводить хирургический инструмент в движение для вращения вокруг удаленного центра движения.
Необязательно хирургическая роботизированная система также содержит ведущее устройство и блок управления, причем ведущее устройство содержит индикатор силы;
причем блок управления коммуникативно связан с ведущим устройством и с ведомым устройством, и блок управления выполнен с возможностью получать информацию о силе в декартовых координатах, получаемой концевым эффектором от чувствительного элемента хирургического инструмента, и передавать информацию индикатору силы.
Необязательно индикатор силы представляет собой ведущий манипулятор, оснащенный двигателем, и блок управления выполнен с возможностью выдавать команду на создание крутящего момента двигателю ведущего манипулятора, чтобы дать возможность оператору ощутить силу, действующую на концевую часть хирургического инструмента.
Необязательно ведущий манипулятор дополнительно содержит вибродвигатель; когда сила, действующая на концевую часть хирургического инструмента, превышает заданный порог, блок управления выдает команду на создание вибрации вибродвигателю ведущего манипулятора, уведомляя оператора об избыточной силе, действующей на концевую часть хирургического инструмента.
Хирургический инструмент в соответствии с данной заявкой имеет первый соединитель и второй соединитель, которые распределены радиально, чувствительный элемент узла датчика давления предусмотрен между первым соединителем и вторым соединителем, и чувствительный элемент выполнен с возможностью воспринимать силу, приложенную вторым соединителем на первый соединитель, и в соответствии с информацией о силе может быть определена сила в декартовых координатах, действующая на концевой эффектор хирургического инструмента.
В некоторых вариантах осуществления узел датчика давления представляет собой тензометрический датчик давления, пьезорезистивный датчик давления или пьезоэлектрический датчик давления. Чувствительный элемент размещен между первым соединителем и вторым соединителем, чтобы принимать силу в области соединения. Когда концевой эффектор хирургического инструмента подвергается воздействию внешней силы (то есть, силы в декартовых координатах), сила, создаваемая вторым соединителем на чувствительном элементе и на первом соединителе, деформирует чувствительный элемент и генерирует информацию о деформации. Затем за счет определения давления между первым соединителем и вторым соединителем на основании данных о деформации, может быть точно и однозначно измерена декартова сила, действующая на концевой эффектор хирургического инструмента.
В частности, дистальный конец вала инструмента хирургического инструмента проходит аксиально с образованием двухслойного и полого опорного вала. Предпочтительно опорный вал имеет канавку с U-образным осевым поперечным сечением. Благодаря U-образной тонкой стенке опорного вала такая тонкостенная особенность также улучшает точность определения силы, действующей на концевой эффектор хирургического инструмента.
По сравнению с традиционными решениями с использованием выходной мощности двигателя для расчета силы, действующей на концевой эффектор хирургического инструмента, хирургический инструмент настоящей заявки имеет преимущества как более простого пути передачи силы, так и более высокой точности измерения силы. Более того, сила, действующая на концевую часть хирургического инструмента, может быть определена более простым способом, не требуя дополнительных компонентов, обеспечивая меньшую конструктивную сложность хирургического инструмента и облегчая его сборку. Кроме того, так как в хирургическом инструменте требуются незначительные изменения, разные существующие хирургические инструменты после их модификации с незначительными изменениями, также могут быть соответствующим образом использованы в хирургической роботизированной системе, предлагаемой настоящей заявкой.
Краткое описание чертежей
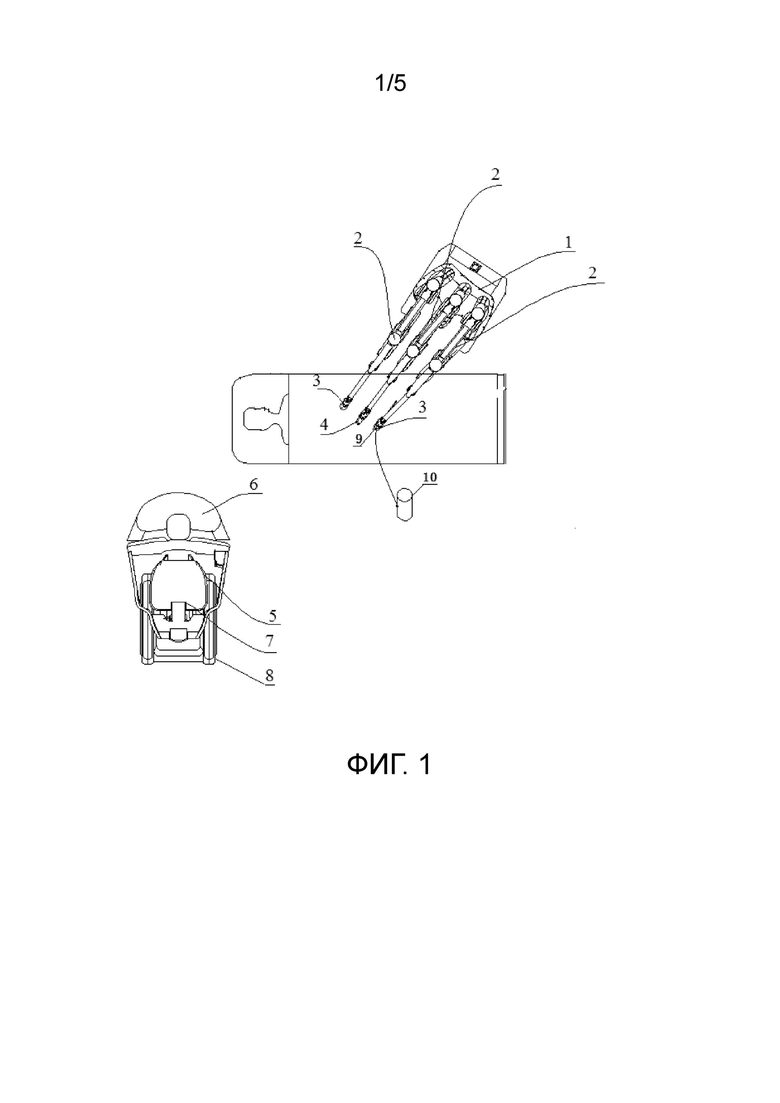
ФИГ. 1 представляет собой структурную схему хирургической роботизированной системы в соответствии с вариантом осуществления заявки.
ФИГ. 2a представляет собой структурную схему хирургического инструмента в соответствии с вариантом осуществления заявки.
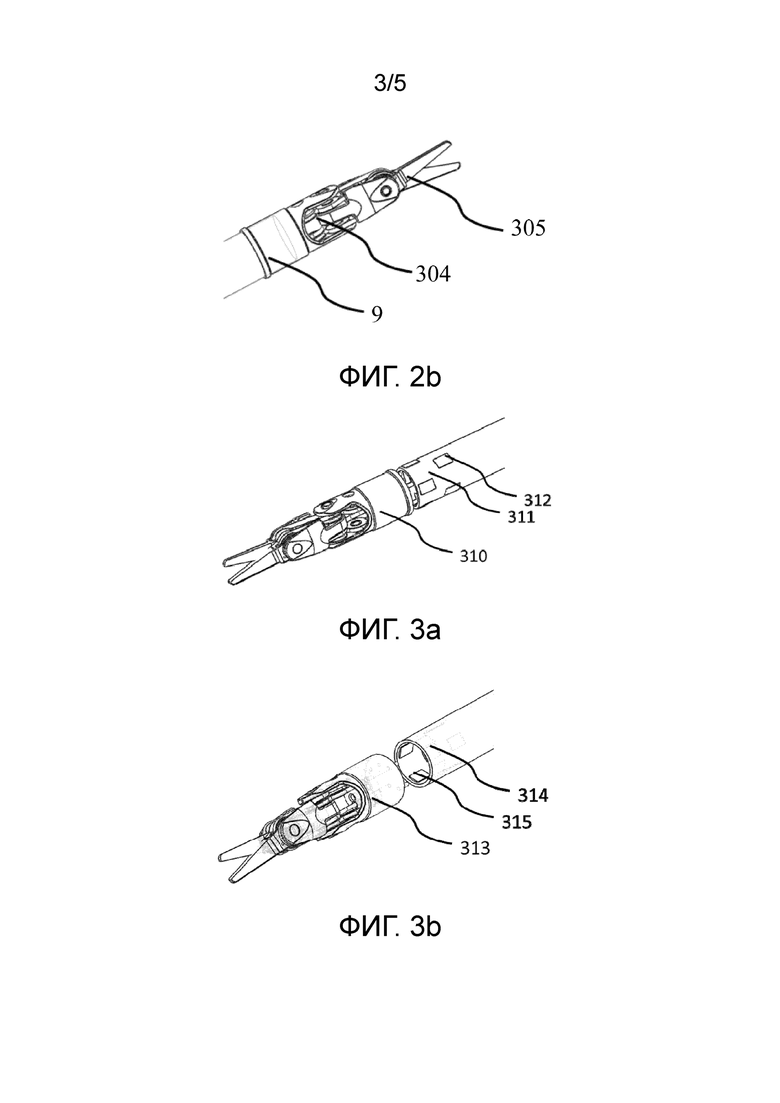
ФИГ. 2b представляет собой частично увеличенный вид хирургического инструмента, показанного ФИГ. 2a.
ФИГ. 3a схематично показывает структуру концевой части хирургического инструмента с деформируемой частью, не образованной в виде единого целого, в соответствии с вариантом осуществления заявки.
ФИГ. 3b схематично показывает структуру концевой части хирургического инструмента с деформируемой частью, не образованной в виде единого целого, в соответствии с другим вариантом осуществления заявки.
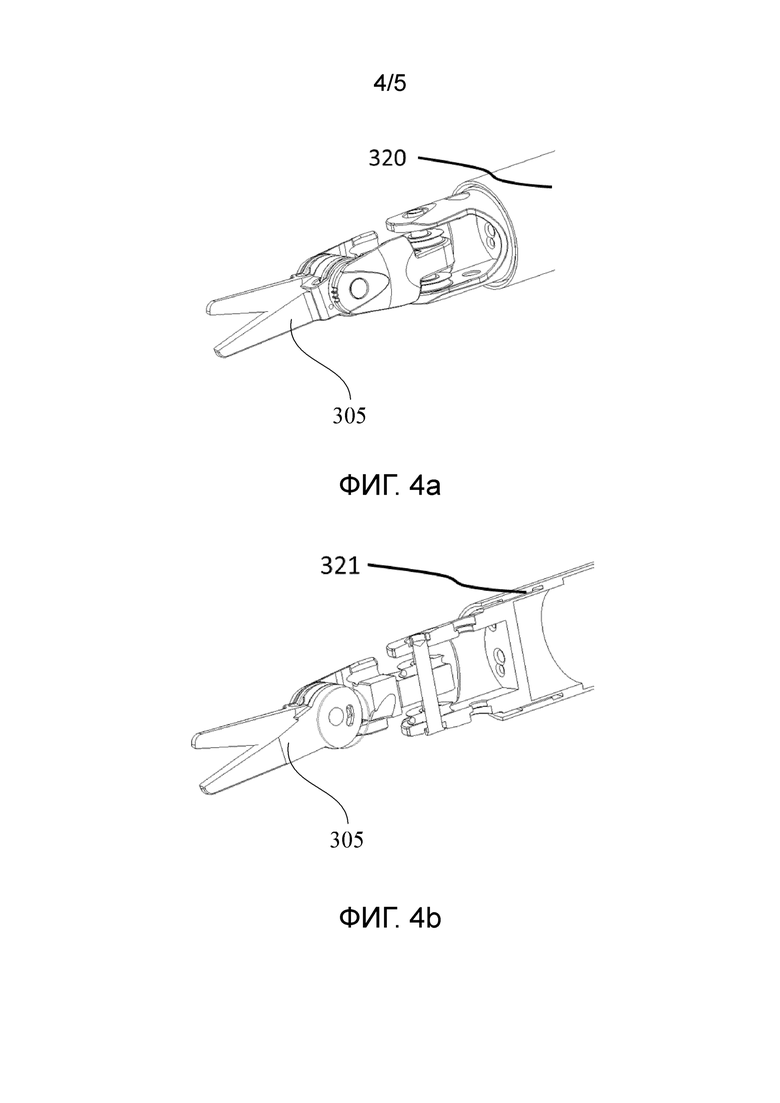
ФИГ. 4a схематично показывает структуру концевой части хирургического инструмента с деформируемой частью, образованной в виде единого целого, в соответствии с другим вариантом осуществления заявки.
ФИГ. 4b представляет собой поперечное сечение концевой части хирургического инструмента, показанной на ФИГ. 4a.
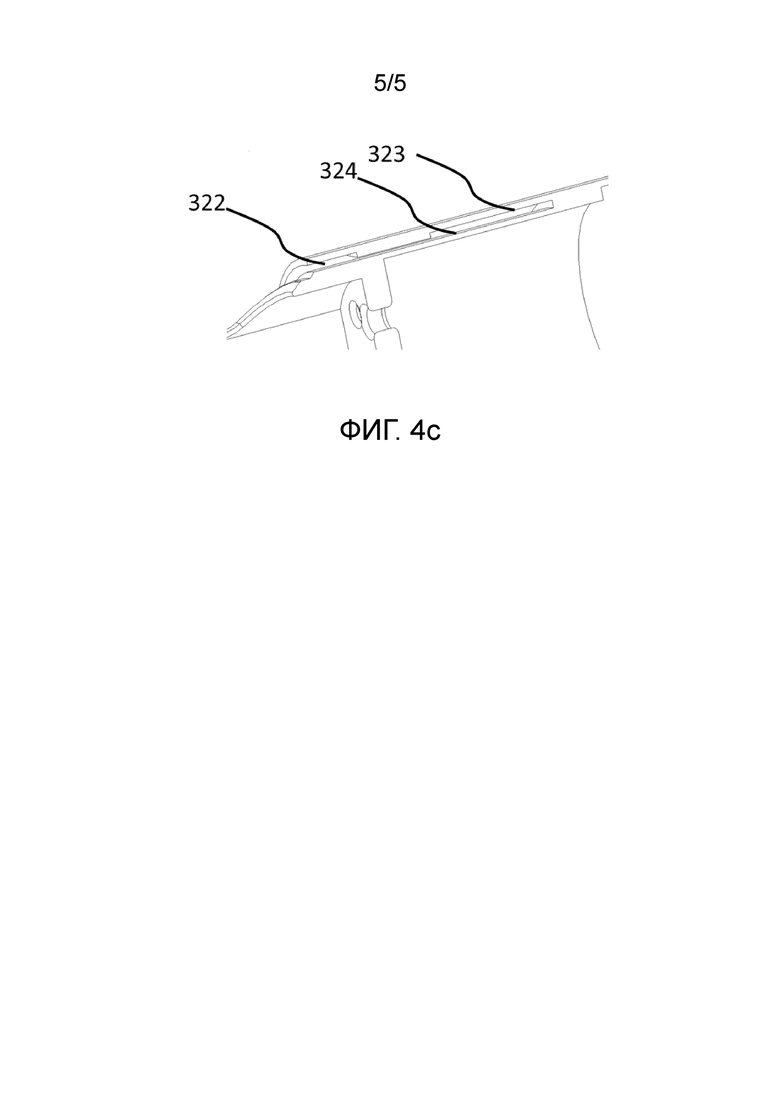
ФИГ. 4c представляет собой частично увеличенный вид концевой части хирургического инструмента, показанной на ФИГ. 4b.
Перечень ссылочных позиций:
Ссылочная позиция 1 - обозначает хирургическую тележку; 2 - обозначает роботизированную руку; 3 - обозначает хирургический инструмент; 301 - обозначает силовой модуль; 302 - обозначает монтажное основание; 303 - обозначает вал инструмента; 304 - обозначает механизм передачи силы; 305 - обозначает концевой эффектор; 4 - обозначает эндоскоп; 5 - обозначает систему визуализации; 6 - обозначает ведущий манипулятор; 7 - обозначает подлокотник; 8 - обозначает основание пульта; 9 - обозначает устройство очувствления; 10 - обозначает блок управления; 310, 313 - обозначает основание концевой части; 312, 315, 321 - обозначает чувствительный элемент; 311, 314 - обозначает опорный вал; 320 - обозначает соединительную часть; 323 - обозначает структуру наружного слоя; 324 - обозначает структуру внутреннего слоя; и 322 - обозначает канавку.
Подробное описание изобретения
Приведенные выше и другие цели, особенности и преимущества настоящей заявки станут более очевидными из приведенного ниже подробного описания предложенной хирургической роботизированной системы и ее хирургического инструмента, которое следует читать вместе с ФИГ. 1-4. Следует отметить, что фигуры максимально упрощены и могут быть выполнены не в масштабе, и единственная их цель состоит в том, чтобы обеспечить простоту и четкость разъяснения раскрытых вариантов осуществления. Как используется в заявке «задний конец», «концевая часть» или «дистальный конец» относятся к концу, отдаленному от оператора и находящемуся ближе к пациенту, тогда как «передний конец» или «проксимальный» относится к концу, находящемуся ближе к оператору и отдаленному от пациента. Как используется в настоящем описании, значение «a» «an» и «the» включает ссылки в единственном и множественном числе, если контекст четко не диктует иное.
Хирургические роботизированные системы в соответствии с этими вариантами осуществления, описанные ниже, способны измерять радиальную силу и/или осевую силу, действующую на концевую часть хирургического инструмента.
ФИГ. 1 представляет собой структурную схему хирургической роботизированной системы. Хирургическая роботизированная система включает ведомое устройство, включающее хирургическую тележку 1, роботизированные руки 2, хирургический инструмент 3, эндоскоп 4. В качестве основания всего ведомого устройства хирургическая тележка 1 поддерживает все другие компоненты ведомого устройства, описанного выше. Вместе с тем, хирургическая тележка 1 способна перемещаться по земле, давая возможность ведомому устройству приближаться к пациенту или отдаляться от него.
Роботизированная рука 2 со множеством степеней свободы смонтирована на хирургической тележке 1 и выполнена с возможностью приводить в движение хирургический инструмент 3 для поворота вокруг удаленного центра движения. Когда хирургическая тележка 1 перемещается в непосредственную близость к пациенту, роботизированная рука 2 может быть отрегулирована так, чтобы хирургический инструмент 3 достигал заранее заданной целевой области хирургического вмешательства. Другими словами, удаленный центр движения размещают вокруг области хирургического вмешательства за счет регулирования как хирургической тележки 1, так и роботизированной руки 2. Хирургический инструмент 3 смонтирован с возможностью отсоединения на концевом участке роботизированной руки 2 посредством жесткого соединения или подвижного соединения. В качестве вывода ведомого устройства хирургический инструмент 3 в конечном итоге будет входить в тело пациента на области хирургического вмешательства, чтобы подвергнуть лечению целевое место поражения.
Эндоскоп 4 установлен на концевой части одной из роботизированных рук 2, отличной от руки, с которой сопряжен хирургический инструмент 3, и выполнен с возможностью собирать информацию в виде изображения о среде хирургического вмешательства. Информация в виде изображения может включать, но без ограничения, информацию о ткани вокруг поражения и информацию о положении тела и положении хирургического инструмента 3. Когда эндоскоп установлен на роботизированной руке 2, эндоскоп 4 может быть коммуникативно связан с ведущим устройством, как подробно описано ниже, чтобы обеспечивать в реальном времени отображение информации о среде хирургического вмешательства, собранной таким образом. Эндоскоп 4 может быть трехмерным или нет, что не ограничено настоящей заявкой.
Далее относительно ФИГ. 1 хирургическая роботизированная система также включает ведущее устройство, которое включает систему визуализации 5, ведущий манипулятор 6, подлокотник 7 и основание пульта 8. Во время хирургической операции, когда информация от эндоскопа 4 отображается с помощью системы визуализации 5, врач может наблюдать за перемещением хирургического инструмента 3 через систему визуализации 5, и соответственно управлять последующим перемещением хирургического инструмента 3, манипулируя ведущим манипулятором 6. Врач может сидеть за хирургическим пультом и с помощью системы визуализации 5 наблюдать за положением и перемещением концевой части хирургического инструмента in vivo. На основании наблюдений врач может управлять многомерным движением (таким как вращение, поворачивание, раскачивание и открывание/закрывание) концевой части, манипулируя ведущим манипулятором 6, что позволяет проводить минимально инвазивную операцию. Подлокотник 7 может поддерживать руку врача, чтобы врач мог сохранять более высокий комфорт, когда хирургическая операция длится продолжительное время. Кроме того, подлокотник 7 может быть поднят и опущен, чтобы удовлетворять разные потребности разных врачей. Основание пульта 8, служащее в качестве базовой структуры ведущего устройства, может свободно перемещаться по земле, и оно поддерживает все другие структуры ведущего устройства, описанные выше.
Конкретная хирургическая операция хирургической роботизированной системы описывается следующим образом.
Во-первых, врач управляет хирургической тележкой 1 и основанием пульта 8, чтобы подтолкнуть ведомое устройство как можно ближе к операционному столу, где находится пациент, с тем чтобы ведомое устройство находилось в лучшем рабочем положении, и чтобы подтолкнуть ведущее устройство к относительно лучшей позиции для манипулирования, которая удобна для врача при проведении манипуляций.
Затем посредством регулирования механической руки 2 хирургический инструмент 3 и эндоскоп 4 перемещают ближе к хирургическому разрезу.
После этого хирургический инструмент 3 и эндоскоп 4 вставляют в тело пациента через разрез на пациенте.
И, наконец, врач оценивает положение и уровень перемещения концевого эффектора хирургического инструмента 3 в теле пациента посредством стереоскопической системы визуализации 5, и регулирует положение и уровень перемещения концевого эффектора с помощью ведущего манипулятора 6, а затем проводит малоинвазивную операцию.
Очевидно, управление от ведущего манипулятора 6 к хирургическому инструменту 3 является основным для управления ведущий/ведомый в хирургической роботизированной системе. Чтобы лучше воспроизводить фактические обстоятельства хирургической операции, то есть, воспроизводить силу, действующую на хирургический инструмент 3 во время операции, желательно, чтобы хирургический инструмент 3 был способен передавать обратно любую силу, действующего на него, ведущему манипулятору 6, то есть, обеспечивать хирургический инструмент 3 возможностями обратной связи, так чтобы врач мог адаптивно корректировать хирургическую операцию. Таким образом, настоящая заявка предлагает хирургический инструмент, снабженный сенсорным датчиком, и соответствующую хирургическую роботизированную систему.
Говоря точнее, хирургический инструмент 3 дополнительно включает сенсорный датчик 9 для восприятия силы, действующей на концевую часть хирургического инструмента 3. Хирургическая роботизированная система также включает блок управления 10 для приема и передачи информации о силе, действующей на хирургический инструмент 3, полученной сенсорным датчиком 9. Блок управления 10 коммуникативно связан как с ведущим, так и с ведомым устройствами, например, с помощью проводного или беспроводного соединений. Блок управления 10 на основании стратегии управления отвечает за обработку данных от сенсорного датчика 9 и за вычисление разнообразных данных, требуемых при управлении. Блок управления 10 выполнен с возможностью передавать информацию о силе, действующей на концевую часть хирургического инструмента 3, индикатору силы ведущего устройства, так что сила, действующая на концевую часть хирургического инструмента 3, может быть воспринята врачом.
Индикатор силы может представлять собой систему визуализации 5, которая может отображать величину и направление действия силы, действующей на концевую часть хирургического инструмента 3. С другой стороны, индикатором силы может быть ведущий манипулятор 6, оснащенный двигателем. Когда врач манипулирует системой, блок управления 10 может контролировать двигатель ведущего манипулятора 6 на основании информации о силе, действующей на концевую часть хирургического инструмента 3, и может создавать силу, действующую на врача. Очевидно, управление от ведущего манипулятора 6 к хирургическому инструменту 3 является основным для управления ведущий/ведомый в хирургической роботизированной системе. Чтобы лучше воспроизводить фактические обстоятельства хирургической операции, то есть, воспроизводить силу, действующую на хирургический инструмент 3 во время операции, желательно, чтобы хирургический инструмент 3 был способен передавать обратно любую силу, действующую на него, ведущему манипулятору 6, и обеспечивать возможности тактильной обратной связи. После того, как силу, действующую на концевую часть хирургического инструмента 3, определяют на основании данных о силе, воспринятых сенсорным датчиком 9, блок управления 10 может выдавать команду на создание крутящего момента двигателю ведущего манипулятора 6, чтобы дать возможность оператору ощутить силу, действующую на концевую часть хирургического инструмента 3. Более предпочтительно ведущий манипулятор 6 может быть снабжен вибродвигателем. В этом случае, когда сила, действующая на концевую часть хирургического инструмента 3, которая определена из данных по силе, воспринятой сенсорным датчиком 9, превышает заданный порог, блок управления 10 может выдавать команду на создание вибрации вибродвигателю ведущего манипулятора 6, уведомляя оператора об избыточной силе, действующей на концевую часть хирургического инструмента 3.
В настоящей заявке хирургический инструмент включает механический конструктивный узел и узел датчика давления. Механический конструктивный узел включает вал инструмента и концевой эффектор. Вал инструмента включает корпус и соединительную часть, проходящую от дистального конца корпуса. Вал инструмента присоединен к концевому эффектору через соединительную часть, и узел датчика давления служит в качестве сенсорного датчика 9 настоящей заявки, а его чувствительный элемент воспринимает силу, проявляемую соединительной частью (то есть, силу в декартовых координатах, полученную концевым эффектором). Далее более подробно описана реализация хирургического инструмента.
Во-первых, обращаясь к ФИГ. 2a и 2b, ФИГ. 2a схематично показывает механический конструктивный узел хирургического инструмента, и ФИГ. 2b показывает частично увеличенный вид механического конструктивного узла хирургического инструмента, представленного на ФИГ. 2a. Как показано, механический конструктивный узел хирургического инструмента 3 включает силовой модуль 301, монтажное основание 302, вал инструмент 303, механизм передачи силы 304 и концевой эффектор 305.
Силовой модуль 301 расположен на проксимальном конце вала инструмента 303, тогда как концевой эффектор 305 расположен на дистальном конце вала инструмента 303. Силовой модуль 301 выполнен с возможностью создавать движущую силу, которую передают с помощью механизма передачи силы к концевому эффектору 305, давая в результате концевому эффектору 305 возможность выполнять многомерное вращательное движение и/или действия открывания/закрывания, и т.д.
Силовой модуль 301 соединен с возможностью разъединения с внешним двигателем, и выполнен с возможностью принимать силу от внешнего двигателя. В частности, силовой модуль 301 соединен с двигателем через редуктор. Выходную силу двигателя увеличивают с помощью редуктора и затем передают к концевому эффектору 305 через силовой модуль 301 и механизм передачи силы 304. Например, механизм передачи силы 304 представляет собой проводную трансмиссию, которая включает стальную проволоку и направляющее колесо. Стальную проволоку используют для передачи силы, и направляющее колесо используют для корректировки направления протягивания стальной проволоки. Говоря точнее, механизм передачи силы 304 проходит через вал инструмента 303 и соединен с силовым модулем 301 и концевым эффектором 305. Концевой эффектор 305 выполнен с возможностью проводить определенные операции, такие как разрезание ножницами, завязывание узлов и захватывание, на области поражения в теле пациента. Настоящая заявка не ограничена каким-либо конкретным типом концевого эффектора 305, поэтому он может представлять собой ножницы, захватное устройство типа клещей, зонд или т.п.
Монтажное основание 302 соединено с возможностью разъединения с концевой частью роботизированной руки 2. Предпочтительно силовой модуль 301 помещен в монтажное основание 302. Проксимальный конец вала инструмента 303 соединен с монтажным основанием 302, и дистальный конец присоединен к концевому эффектору 305. Вал инструмента 303 имеет достаточную длину, так что во время операции концевой эффектор 305 может проводить обработку на нужном месте пациента.
Вал инструмента 303 включает корпус и соединительную часть 320, проходящую от дистального конца корпуса (см. ФИГ. 4a). Соединительная часть 320 включает первый соединительный элемент и второй соединительный элемент, которые распределены радиально, при этом первый соединительный элемент жестко соединен с корпусом вала инструмента, и второй соединительный элемент жестко присоединен к концевому эффектору. Более того, чувствительный элемент узла датчика давления расположен между первым соединительным элементом и вторым соединительным элементом, то есть, расположен на соединительной части 320 вала инструмента 303, для восприятия силы, оказываемой на него соединительной частью 320, тем самым определяя силу, действующую на соединительную часть 320, и даже общее напряжение концевого эффектора 305 (то есть, противодействующую силу от ткани человека к концевому эффектору 305). Соединительная часть 320 может быть образована отдельно от корпуса вала инструмента 303, то есть, они произведены отдельно и затем собраны вместе с получением единого целого. Кроме того, чувствительный элемент может быть выбран из тензометрических датчиков, таких как пьезоэлектрические тензометры, пьезорезистивные тензометры, тензометры и др., чтобы воспринимать силу, действующую на соединительную часть 320. В некоторых вариантах осуществления узел датчика давления включает схему, содержащую чувствительный элемент. Когда чувствительный элемент деформируется из-за действующей силы и сопротивление меняется, ток или напряжение схемы также меняется. На основании соотношения между калиброванным током/напряжением и давлением, узел датчика давления воспринимает давление, действующее на чувствительный элемент.
Например, в варианте осуществления, показанном на ФИГ. 3a, первый соединитель и второй соединитель сконструированы в виде двух отдельных элементов. Говоря точнее, второй соединитель представляет собой основание концевой части 310, соединенное с проксимальным концом концевого эффектора 305, и основание концевой части 310 имеет полую структуру, чтобы облегчить прохождение вышеупомянутого механизма передачи силы 304. Первый соединитель представляет собой опорный вал 311, жестко соединенный с корпусом вала инструмента 303. Аналогично, опорный вал 311 также имеет полую структуру, чтобы облегчить прохождение механизма передачи силы 304. Диаметр и материал опорного вала 311 могут быть такими же, как у других частей вала инструмента 303, или могут отличаться. Более того, один или несколько чувствительных элементов 312 прикреплены к наружной поверхности (предпочтительно наружной круговой поверхности) опорного вала 311. Предпочтительно множество чувствительных элементов 312 равномерно распределены в направлении по окружности опорного вала 311. Более предпочтительно опорный вал 311 снабжен множеством рядов чувствительных элементов 312, распределенных равномерно в направлении по окружности, и каждый ряд чувствительных элементов 312 и соседний ряд чувствительных элементов 312 расположены в шахматном порядке. Кроме того, внутренний диаметр основания концевой части 310 больше, чем наружный диаметр опорного вала 311, и немного меньше, чем сумма наружного диаметра опорного вала 311 и радиального размера чувствительного элемента 312, чтобы получить посадку с натягом, так что опорный вал 311 может быть вставлен в основание концевой части 310 и зафиксирован с его помощью. Здесь радиальный размер чувствительного элемента 312 представляет собой толщину чувствительного элемента 312 вдоль направления поперечного сечения основания концевой части 310 или опорного вала 311. Перед использованием чувствительного элемента 312 ошибка измерения чувствительных компонентов из-за посадки с натягом может быть исключена за счет настройки справочного измерения. В других вариантах осуществления внутренний диаметр основания концевой части 310 немного больше, чем сумма наружного диаметра опорного вала 311 и радиального размера чувствительного элемента 312, то есть, между ними двумя получают посадку с зазором. Если основание концевой части 310 закреплено с помощью посадки с зазором с опорным валом 311, прокладка, такая как эластичный каучук, силикон, предпочтительно предусмотрена в зазоре между основанием концевой части 310 и опорным валом 311, для лучшей эластичности соединительной части 320. Кроме того, предпочтительно основание концевой части 310 и опорный вал 311 расположены коаксиально и в посадке с зазором.
В соединительной части 320, образованной основанием концевой части 310 и опорным валом 311, который закреплен в нем, опорный вал 311 жестко соединен с корпусом вала инструмента 303, основание концевой части 310 жестко прикреплено к концевому эффектору 305, и чувствительный элемент 312 расположен между опорным валом 311 и основанием концевой части 310. Когда концевой эффектор 305 хирургического инструмента 3 подвергается воздействию декартовой силы и передает декартову силу основанию концевой части 310, основание концевой части 310 создает декартову силу на чувствительном элементе 312. Эта сила сразу же воспринимается чувствительным элементом 312. Следовательно, посредством измерения силы, действующей на основание концевой части 310 и опорный вал 311, декартова сила, полученная концевой частью хирургического инструмента 305, может быть точно и однозначно измерена, и, более того, ошибки измерения, вызванные изменениями в структуре концевой части хирургического инструмента, могут быть исключены.
Говоря точнее, во время фактической операции, когда концевой эффектор 305 хирургического инструмента 3 подвергается действию декартовой силы, проявляемой тканями человека, концевой эффектор 305 передает декартову силу основанию концевой части 310, и основание концевой части 310 затем создает декартову силу на чувствительном элементе 312, который прикреплен к наружной поверхности опорного вала 311. Следовательно, на основании данных о силе, полученных от воспринимающего чувствительного элемента 312, можно ощутить силу в декартовых координатах, полученную концевым эффектором 305 хирургического инструмента 3.
Однако чувствительный элемент 312 не ограничен тем, что он прикреплен к наружной поверхности опорного вала 311, но также может быть прикреплен к внутренней поверхности (предпочтительно внутренней круговой поверхности) основания концевой части 310. В этом случае внутренний диаметр (то есть, внутренний диаметр основания концевой части 310 минус радиальный размер чувствительного элемента 312) основания концевой части 310, к которому чувствительный элемент 312 был прикреплен, может быть немного меньше, чем наружный диаметр опорного вала 311, чтобы получить посадку с натягом.
В отличие от предыдущего варианта осуществления первый соединитель соединительной части 320 закреплен поверх второго соединителя, см. ФИГ. 3b. В варианте осуществления, показанном на ФИГ. 3b, второй соединитель представляет собой основание концевой части 313, соединенное с проксимальным концом концевого эффектора 305, и основание концевой части 313 имеет полую структуру, чтобы облегчить прохождение механизма передачи силы 304. Первый соединитель представляет собой опорный вал 314, жестко соединенный с корпусом вала инструмента 303. Аналогично, опорный вал 314 также имеет полую структуру, с тем чтобы механизм передачи силы 304 мог проходить через него. Диаметр и материал опорного вала 314 могут быть такими же, как и у других частей вала инструмента 303, или могут отличаться. Один или несколько чувствительных элементов 315 прикреплены к внутренней поверхности (предпочтительно к внутренней круговой поверхности) опорного вала 314. Отличие от описанного выше варианта осуществления состоит в том, что наружный диаметр основания концевой части 313 меньше, чем внутренний диаметр опорного вала 314, и немного больше, чем разность между внутренним диаметром опорного вала 314 и радиальным размером чувствительного элемента 315, то есть, основание концевой части 313 может быть вставлено в опорный вал 314 в виде посадки с натягом. Аналогично, наружный диаметр основания концевой части 313 может быть немного меньше, чем разность между внутренним диаметром опорного вала 314 и радиальным размером чувствительного элемента 315, то есть, получают посадку с зазором между основанием концевой части 313 и опорным валом 314, и прокладку, такая как эластичный каучук, силикон или т.п., помещают в зазоре между основанием концевой части 313 и опорными валами 314. Предпочтительно основание концевой части 313 расположено коаксиально и в виде посадки с зазором с опорным валом 314.
Помимо внутренней поверхности опорного вала 314 чувствительный элемент 315 также может быть прикреплен к наружной поверхности (предпочтительно к наружной круговой поверхности) основания концевой части 313. В этом случае наружный диаметр (то есть, сумма наружного диаметра основания концевой части 313 и радиального размера чувствительного элемента 315) основания концевой части 313, к которому чувствительный элемент 315 был прикреплен, немного больше, чем внутренний диаметр опорного вала 314, чтобы получить посадку с натягом, или наружный диаметр основания концевой части 313 и радиальный размер чувствительного элемента 315 немного меньше, чем внутренний диаметр опорного вала 314, чтобы получить посадку с зазором, и используют прокладку, чтобы заполнить зазор между ними двумя.
Любое из описанных выше оснований концевой части 310, 313 могут быть образованы путем осевого удлинения проксимального конца концевого эффектора 305.
Кроме того, первый соединитель и второй соединитель могут быть спроектированы в виде одной детали, чтобы упростить структуру хирургического инструмента и оптимизировать размер хирургического инструмента. Аналогично описанному выше варианту осуществления в другом предпочтительном решении, показанном на ФИГ. 4a-4c, первый соединитель реализован в виде структуры наружного слоя 323, соединенной с дистальным концом корпуса вала инструмента 303. Структура наружного слоя 323 имеет полую структуру, чтобы облегчить прохождение механизма передачи силы 304. Второй соединитель реализован в виде структуры внутреннего слоя 324, соединенной с проксимальным концом концевого эффектора 305, и структура внутреннего слоя 324 является полой, чтобы облегчить прохождение вышеупомянутого механизма передачи силы 304. Соединительная часть 320 жестко прикреплена к концевому эффектору 305, и предпочтительно структура внутреннего слоя 324 жестко прикреплена к концевому эффектору 305. В частности, структура наружного слоя 323 расположена на периферии структуры внутреннего слоя 324 и радиально соединена со структурой внутреннего слоя 324 с образованием вместе рычага вала соединительной части 320 вала инструмента. Таким образом, канавка 322 образуется между структурой внутреннего слоя 324 и структурой наружного слоя 323. Предпочтительно канавка 322 имеет U-образную форму. Предпочтительно усиливающая пластина предусмотрена в канавке 322 для повышения прочности структуры. Более того, один или несколько чувствительных элементов 321 размещены в канавке 322, например, прикреплены в внутренней поверхности структуры наружного слоя 323 соединительной части 320, или прикреплены к наружной поверхности структуры внутреннего слоя 324 соединительной части 320. Предпочтительно в канавке предусмотрена прокладка 322, такая как эластичный каучук, силикон и др., чтобы повысить эластичность соединительной части 320.
Следует понимать, что, когда концевой эффектор 305 подвергается действию силы, оказываемой тканью человека, структуры внутреннего и наружного слоя, образующие канавку 322, могут быть до некоторой степени деформированы из-за полой структуры рычага вала соединительной части 320, тем самым нажимая на чувствительный элемент 321, и, соответственно, чувствительный элемент 321 деформируется. В соответствии с деформацией узел датчика давления может определять силу, принятую чувствительным элементом 321, и затем может воспринять силу (в том числе ее величину и направление), действующую на концевой эффектор 305, и, наконец, определить силу, действующую на концевая часть хирургического инструмента. Необязательно множество чувствительных элементов 321 распределены равномерно по окружности в канавке 322, и более предпочтительно в канавке 322 предусмотрено множество рядов чувствительных элементов 321, распределенных по окружности и равномерно вдоль направления по оси, что улучшает точность определения.
Хотя выше представлено подробное описание конструкций хирургического инструмента, само собой разумеется, что настоящая заявка включает, но без ограничения ими, вышеописанные конфигурации, и любые изменения, внесенные в них, также должны подпадать под объем заявки. Специалист в данной области техники может получить другие варианты осуществления в свете указаний представленных выше вариантов осуществления.
Кроме того, настоящая заявка также предлагает хирургическую роботизированную систему. Хирургическая роботизированная система включает ведомое устройство. Ведомое устройство включает роботизированную руку и хирургический инструмент, упомянутый выше. Хирургический инструмент соединен с возможностью разъединения с концевой частью роботизированной руки, так что хирургический инструмент может быть приведен в движение для перемещения вокруг удаленного центра движения. Более того, хирургическая роботизированная система также включает ведущее устройство и блок управления. Ведущее устройство включает индикатор силы. Блок управления коммуникативно связан с ведущим устройством и ведомым устройством. Блок управления выполнен с возможностью определения информации по декартовой силе, полученной концевым эффектором от чувствительного элемента хирургического инструмента, и передавать информацию индикатору силы. Более того, блок управления 10 может использовать существующий контроллер ПЛК (PLC), микрокомпьютер, микропроцессор или т.п., и специалисту в данной области техники будет понятно, как как реализовать такой выбор на основании приведенного описания в сочетании с общими знаниями в этой области.
Хирургический инструмент по настоящему изобретению в соответствии с данной заявкой имеет первый соединитель и второй соединитель, которые распределены радиально, чувствительный элемент расположен между первым соединителем и вторым соединителем, и чувствительный элемент может воспринимать силу, действующую на концевую часть вала инструмента хирургического инструмента, и затем определять силу в декартовых координатах, полученную концевым эффектором хирургического инструмента. Более того, в некоторых вариантах осуществления узел датчика давления представляет собой тензометрический датчик давления, пьезорезистивный датчик давления или пьезоэлектрический датчик давления, и чувствительный элемент расположен между первым соединителем и вторым соединителем, чтобы воспринимать силу, действующую на соединительную часть. Концевая часть хирургического инструмента подвергается воздействию внешней силы, так что первый соединитель и второй соединитель подвергаются воздействию силы соответствующим образом и передают эту силу чувствительному элементу, в результате чувствительный элемент деформируется. Такую деформацию немедленно воспринимает чувствительный элемент, так что сила, действующая на соединительную часть, может быть определена. Следовательно, давление между первым соединителем и вторым соединителем определяют из данных по деформации, и декартова сила, действующая на концевая часть хирургического инструмента, может быть измерена точно и однозначно.
В частности, дистальный конец вала инструмента хирургического инструмента проходит аксиально с образованием двухслойного опорного вала. Предпочтительно опорный вал имеет канавку с U-образным осевым поперечным сечением. Благодаря U-образной тонкой стенке опорного вала точность определения силы, действующей на концевая часть хирургического инструмента, может быть дополнительно улучшена.
По сравнению с традиционными решениями, использующими мощность двигателя для расчета силы, действующей на концевую часть хирургического инструмента, хирургический инструмент настоящей заявки имеет преимущества как более простого пути передачи силы, так и более высокой точности измерения силы. Кроме того, сила, действующая на концевая часть хирургического инструмента, может быть определена более простым способом независимо от конструкции хирургического инструмента, не требуя дополнительных компонентов, что обеспечивает меньшую конструктивную сложность хирургического инструмента и облегчает его сборку. Кроме того, поскольку в хирургическом инструменте требуются незначительные изменения, после модификации с незначительными изменениями разные существующие хирургические инструменты могут быть соответствующим образом использованы в хирургической роботизированной системе, предложенной настоящей заявкой.
Приведенное выше описание описывает только предпочтительные варианты осуществления настоящего изобретения, и оно не предназначено для ограничения области применения настоящего изобретения. Любые изменения и модификации, выполненные специалистами в данной области техники в соответствии с приведенным выше изобретением, все находятся в рамках объема защиты прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| КОНФИГУРАЦИИ БЛОКИРОВКИ ПУСКОВОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2645408C2 |
| ПОВОРОТНЫЕ ПРИВОДНЫЕ КОНСТРУКЦИИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2640002C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| КОНФИГУРАЦИЯ ЗАКРЫТИЯ ДЛЯ ХИРУРГИЧЕСКОГО КОНЦЕВОГО ЭФФЕКТОРА С ВОЗМОЖНОСТЬЮ ПОВОРОТНОЙ АКТИВАЦИИ | 2013 |
|
RU2641372C2 |
| ПОВОРОТНЫЕ ОПОРНО-СОЕДИНИТЕЛЬНЫЕ УЗЛЫ ДЛЯ СОЕДИНЕНИЯ ПЕРВОЙ ЧАСТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА СО ВТОРОЙ ЧАСТЬЮ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2013 |
|
RU2640003C2 |
| КОНФИГУРАЦИИ ДИФФЕРЕНЦИАЛЬНОЙ БЛОКИРОВКИ ДЛЯ ПОВОРОТНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ | 2013 |
|
RU2647778C2 |
| МНОГООСЕВЫЕ ШАРНИРНЫЕ И ПОВОРОТНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ | 2013 |
|
RU2642268C2 |
| СОЕДИНЕНИЯ ЭЛЕКТРОДОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ПОВОРОТНЫМ ПРИВОДОМ | 2013 |
|
RU2659629C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |

Группа изобретений относится к медицинской технике, а именно к хирургической роботизированной системе и ее хирургическому инструменту. Хирургический инструмент содержит механический конструктивный узел и узел датчика давления. Механический конструктивный узел содержит вал инструмента и концевой эффектор. Вал инструмента содержит корпус и соединительную часть, проходящую от дистального конца корпуса. Соединительная часть содержит первый соединитель и второй соединитель, которые распределены радиально. Первый соединитель жестко соединен с корпусом вала инструмента, а второй соединитель жестко присоединен к концевому эффектору. Узел датчика давления содержит чувствительный элемент, расположенный между первым соединителем и вторым соединителем, и чувствительный элемент выполнен с возможностью воспринимать силу, оказываемую соединительной частью на чувствительный элемент, для определения декартовой силы, получаемой концевым эффектором. Хирургическая роботизированная система содержит ведомое устройство. Ведомое устройство содержит роботизированную руку и вышеуказанный хирургический инструмент. Роботизированная рука имеет концевую часть, соединенную с возможностью разъединения с хирургическим инструментом, и выполнена с возможностью приведения хирургического инструмента в движение для поворота вокруг удаленного центра движения. Использование изобретений позволяет упростить конструкцию средства измерения силы контакта и также улучшить точность измерения. 2 н. и 14 з.п. ф-лы, 4 ил.
1. Хирургический инструмент, содержащий механический конструктивный узел и узел датчика давления, при этом:
механический конструктивный узел содержит вал инструмента и концевой эффектор; вал инструмента содержит корпус и соединительную часть, проходящую от дистального конца корпуса; соединительная часть содержит первый соединитель и второй соединитель, которые распределены радиально; первый соединитель жестко соединен с корпусом вала инструмента, а второй соединитель жестко присоединен к концевому эффектору;
узел датчика давления содержит чувствительный элемент, расположенный между первым соединителем и вторым соединителем, и чувствительный элемент выполнен с возможностью воспринимать силу, оказываемую соединительной частью на чувствительный элемент, для определения декартовой силы, получаемой концевым эффектором.
2. Хирургический инструмент по п. 1, в котором первый соединитель представляет собой полый опорный вал, второй соединитель представляет собой полое основание, основание образовано в результате осевого удлинения проксимального конца концевого эффектора, и основание выполнено с возможностью скрепления с опорным валом.
3. Хирургический инструмент по п. 1, в котором первый соединитель представляет собой структуру наружного слоя, второй соединитель представляет собой структуру внутреннего слоя, структура наружного слоя радиально соединена со структурой внутреннего слоя с образованием канавки, в которой расположен чувствительный элемент.
4. Хирургический инструмент по п. 3, в котором канавка имеет U-образное осевое сечение.
5. Хирургический инструмент по п. 1, в котором размер наружной поверхности первого соединителя меньше размера внутренней поверхности второго соединителя; и
размер внутренней поверхности второго соединителя меньше суммы размера наружной поверхности первого соединителя и радиального размера чувствительного элемента.
6. Хирургический инструмент по п. 1, в котором размер внутренней поверхности второго соединителя больше суммы размера наружной поверхности первого соединителя и радиального размера чувствительного элемента, и между первым соединителем и вторым соединителем расположена прокладка для повышения эластичности между первым соединителем и вторым соединителем.
7. Хирургический инструмент по п. 1, в котором размер внутренней поверхности первого соединителя больше размера наружной поверхности второго соединителя, и
размер внутренней поверхности первого соединителя меньше суммы размера наружной поверхности второго соединителя и радиального размера чувствительного элемента.
8. Хирургический инструмент по п. 1, в котором размер внутренней поверхности первого соединителя больше суммы размера наружной поверхности второго соединителя и радиального размера чувствительного элемента, и между первым соединителем и вторым соединителем расположена прокладка для повышения эластичности между первым соединителем и вторым соединителем.
9. Хирургический инструмент по п. 6 или 8, в котором прокладка выполнена из каучука или силикона.
10. Хирургический инструмент по п. 1, в котором узел датчика давления содержит один чувствительный элемент или содержит множество чувствительных элементов, причем множество чувствительных элементов распределено вдоль направления по окружности и/или направления по оси хирургического инструмента.
11. Хирургический инструмент по п. 10, в котором множество чувствительных элементов распределено на множество рядов в направлении по окружности хирургического инструмента, причем чувствительные элементы в каждом из рядов равномерно распределены в направлении по окружности хирургического инструмента.
12. Хирургический инструмент по п. 11, в котором каждый из рядов чувствительных элементов расположен в шахматном порядке с соседним рядом из рядов чувствительных элементов.
13. Хирургическая роботизированная система, содержащая ведомое устройство, содержащее:
роботизированную руку и хирургический инструмент по любому из пп. 1-12;
при этом роботизированная рука имеет концевую часть, соединенную с возможностью разъединения с хирургическим инструментом, и выполнена с возможностью приведения хирургического инструмента в движение для поворота вокруг удаленного центра движения.
14. Хирургическая роботизированная система по п. 13, дополнительно содержащая ведущее устройство и блок управления, причем ведущее устройство содержит индикатор силы;
причем блок управления коммуникативно связан с ведущим устройством и ведомым устройством, и блок управления выполнен с возможностью получения информации о декартовой силе, получаемой концевым эффектором от чувствительного элемента хирургического инструмента, и передачи информации индикатору силы.
15. Хирургическая роботизированная система по п. 14, в которой индикатор силы представляет собой ведущий манипулятор, оснащенный двигателем, и блок управления выполнен с возможностью выдачи команды на создание крутящего момента двигателю ведущего манипулятора, чтобы оператор мог почувствовать силу, действующую на концевую часть хирургического инструмента.
16. Хирургическая роботизированная система по п. 15, в которой ведущий манипулятор дополнительно содержит вибродвигатель; причем, когда сила, действующая на концевую часть хирургического инструмента, превышает заданный порог, блок управления выдает команду на создание вибрации вибродвигателю ведущего манипулятора, уведомляя оператора об избыточной силе, действующей на концевую часть хирургического инструмента.
| CN 101325920 A, 17.12.2008 | |||
| CN 105796043 A, 27.07.2016 | |||
| WO 2007005976 A1, 11.01.2007 | |||
| US 5391144 A, 21.02.1995. |

