Изобретение относится к области дистанционного мониторинга опасных природных процессов и может быть использовано для определения с космического аппарата (КА) параметров движения объекта преимущественно смещающихся природных масс ледника и оползня.
Движение ледника и оползня может привести к катастрофическим последствиям (Л.В. Десинов. Снежный покров и ледники. М.: «Знание», 1988; Л.В. Десинов. Агрессия горного ледника. «Земля и Вселенная», № 1, 2003). Поэтому необходимо контролировать движение и моменты времени их схода.
Для определения скорости движения ледника могут быть использованы своеобразные «ледниковые часы» - криокинеметры (криокинеметр, приспособленный для непрерывной записи, называется криокинеграфом). Например, известны сконструированный Швейцарской ледниковой комиссией криокинеметр (Mercanton P.Le cryocinemetre de la Commission helvetigue des glaciers. «Ztschr. F.G.», XXII, 1935), содержащий основание, блок вращения, циферблат со стрелками и проволоку с закрепленными на ней грузиком и якорем, который связывает прибор с ледником, и криокинеграф (Galloway R. W. Mechanical measurement of glacier motion. «Journ. Of Glaciology», No. 19, 1956), который устанавливают на трубках, глубоко погруженных в лед и заполненных замораживающей смесью льда и соли. Определив скорость движения ледника, можно приблизительно оценить момент времени его схода.
Также известен способ определения перемещения ледника за заданный промежуток времени (С.В. Калесник. Очерки гляциологии, Государственное издательство географической литературы, Москва, 1963), согласно которому ставят две вехи, одну на языке ледника, другую - на склоне ледника, и с помощью угломерного прибора, размещаемого с наблюдателем на склоне ледника, измеряют перемещение ледника за заданный промежуток времени, по которому определяют скорость движения ледника. С помощью данного способа можно получить качественную оценку момента времени катастрофического схода ледника. Применение данного способа ограничено условием прямой видимости установленных на леднике и склоне ледника вех и наблюдателя, а также самой необходимостью работы специалистов на леднике и его склоне.
Известен способ определения скорости движения фронтальной части ледника с КА (патент РФ № 2568152 по заявке № 2014120766/28, МПК G01C 11/00 (2006.01), приоритет от 22.05.2014), согласно которому определяют неподвижные характерные точки на склонах ледника, осуществляют с КА съемку ледника и неподвижных характерных точек и получают изображение, фиксируют контрольный створ в виде линии, проходящей через неподвижные характерные точки, в случае пересечения изображения ледника и контрольного створа измеряют по полученному изображению расстояние от контрольного створа до максимально удаленной крайней точки языка ледника, а в случае если изображение ледника и контрольный створ не пересекаются - расстояние до минимально удаленной крайней точки языка ледника, через промежуток времени ΔT, больший или равный n=3⋅d/0.2, где n - количество суток, d - геометрическое разрешение съемочной системы КА по поверхности Земли, повторяют съемку с КА при возникновении условий съемки, определяют изменение δL, измеряемого расстояния от контрольного створа до крайней точки языка ледника и определяют скорость движения фронтальной части ледника по формуле ΔL/ΔТ.
К недостаткам способа относится то, что он не обеспечивает контроля возможности наступления катастрофического события на объекте, достижение которого фронтальной части ледника приведет к катастрофическим последствиям, с учетом времени, необходимого для принятия решения по подготовке к наступлению катастрофического события.
Известен способ определения параметров движения наблюдаемого с космического аппарата ледника (патент РФ № 2643224 по заявке №2016125590, МПК G01C 11/06 (2006.01), приоритет от 28.06.2016 - прототип), включающий построение и поддержание ориентации КА, требуемой для выполнения съемки с КА земной поверхности, и определение по измеренным параметрам орбиты КА моментов времени прохождения КА над ледником, съемку с КА ледника и неподвижных характерных наземных точек в моменты, взятые через задаваемый промежуток времени, и определение скорости движения фронтальной части ледника по получаемым изображениям, согласно которому выполняют дополнительные две или более съемки ледника и характерных точек вокруг ледника через отсчитываемое от момента выполнения предшествующей съемки ледника время, взятое из диапазона значений {KΔTd,ΔTp - Δtподг}, где
ΔTd и ΔТР - промежутки времени, прогнозируемые по скорости, ускорению и производной ускорения движения фронтальной части ледника, определенным по последним изображениям ледника, в течение которых фронтальная часть ледника переместится на расстояния, равные, соответственно, углу разрешения съемочной системы КА, умноженному на высоту орбиты, и расстоянию от местоположения фронтальной части ледника на момент выполнения предшествующей съемки ледника до задаваемой наземной точки, отсчитываемому вдоль задаваемой линии движения фронтальной части ледника к данной точке;
Δtподг - задаваемое время для подготовительных операций перед достижением фронтальной частью ледника задаваемой точки;
K - коэффициент, выбираемый из условия надежности определения перемещения ледника по получаемым в съемках изображениям;
при этом по получаемым изображениям определяют расстояния от характерных наземных точек до фронтальной части ледника, по которым определяют скорость, ускорение и производную ускорения движения фронтальной части ледника. Способ позволяет определить скорость, ускорение и скорость изменения ускорения фронтальной части ледника с учетом возможности достижения фронтальной частью ледника задаваемых наземных точек.
К недостаткам способа-прототипа относится то, что в нем используется съемка с КА потенциально опасного объекта с последующей обработкой получаемых изображений, включающей распознавание и координатную привязку характерных наземных точек и характерных точек непосредственного потенциально опасного объекта, при этом возможности реализации съемки с КА ограничены необходимостью выполнения условий, определяемых характеристиками аппаратуры наблюдения и характеризующихся взаимным положением объекта съемки и трасс КА на земной поверхности, освещенностью объекта (как правило углом возвышения Солнца над плоскость местного горизонта), метеоусловиями (как правило характеристиками облачности). Указанные ограничения существенно ограничивают возможность применения способа-прототипа, а при его использовании существенно снижают оперативность контроля движения потенциально опасного объекта.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение использования высокоточных данных спутниковой навигации для определения параметров движения объекта преимущественно смещающихся природных масс ледника и оползня.
Технический результат предлагаемого изобретения заключается в повышении оперативности и точности определения параметров движения объекта преимущественно смещающихся природных масс ледника и оползня.
Технический результат достигается тем, что в способе определения с орбитального космического аппарата параметров движения объекта преимущественно смещающихся природных масс ледника и оползня, включающем построение и поддержание задаваемой ориентации космического аппарата, снабженного радиоприемопередающими средствами, определение по измеренным параметрам орбиты космического аппарата моментов времени прохождения космического аппарата над объектом и определение параметров движения объекта по получаемым аппаратурным данным, дополнительно по радиосигналам от спутников системы спутниковой навигации, принятым размещенным на объекте приемопередающим радиоустройством, определяют координаты местоположения радиоустройства, по которым с учетом значений параметров орбиты космического аппарата определяют время нахождения радиоустройства в зоне видимости передающей антенны космического аппарата, в течение которого выполняют прием радиоустройством передаваемого с космического аппарата радиосигнала с текущими значениями параметров орбиты, по которым с учетом определенных текущих координат местоположения радиоустройства определяют время нахождения радиоустройства в зоне видимости приемной антенны космического аппарата, в течение которого выполняют передачу радиоустройством радиосигнала с координатами местоположения радиоустройства, определенными для задаваемого количества моментов через задаваемые промежутки времени, и значения моментов времени, на которые выполнено определение данных координат, выполняют прием данного радиосигнала на космическом аппарате и параметры движения объекта определяют по принятым координатам местоположения радиоустройства и моментам времени, на которые выполнено их определение.
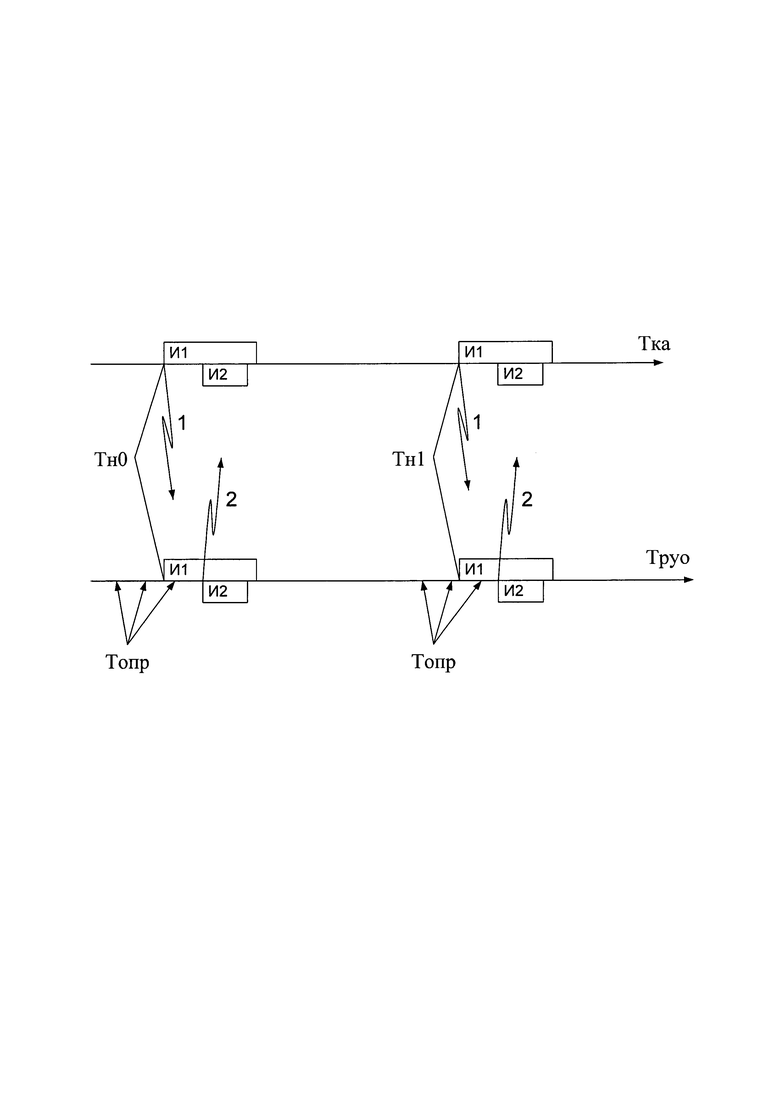
Суть изобретения поясняется рисунком, на котором приведен пример возможной циклограмм выполнения действий при реализации предлагаемого изобретения и обозначено:
Тка - временная шкала КА;
Труо - временная шкала приемопередающего радиоустройства, размещенного на объекте,
И1 - интервалы времени, в течение которых размещенное на объекте радиоустройство находится в зоне видимости передающей антенны КА;
И2 - интервалы времени, в течение которых размещенное на объекте радиоустройство находится в зоне видимости приемной антенны КА;
1 - передача радиочастотного сигнала средствами радиосвязи КА;
2 - передача радиочастотного сигнала радиоустройством, размещенным на объекте;
Тн0, Тн1 - моменты начала, соответственно, первого и второго сеансов передачи/приема информации между средствами радиосвязи КА и радиоустройством, размещенным на объекте;
Топр - моменты времени, в которые осуществляют определение координат местоположения радиоустройства по принятым радиоустройством радиочастотным сигналам от спутников системы спутниковой навигации.
Поясним суть изобретения.
В предлагаемом способе на объекте - например, на фронтальной части (языке) ледника или на массиве пород, которые составляют или потенциально могут составить массив смещающихся природных масс в виде оползня - размещают снабженное блоком управления приемопередающее радиоустройство, приспособленные для обмена данными со средствами радиосвязи КА, а также снабженное антенной (приемником) для приема сигналов от спутников одной или нескольких систем спутниковой навигации (систем ГЛОНАСС, GPS, Галилео, BeiDou и/или их комбинаций). Считаем, что радиоустройство имеет автономное питание (например, аккумуляторные и солнечные батареи). Радиоустройство размещают на объекте таким образом, что оно сохраняет свою функциональную работоспособность в процессе возможного перемещения (движения) рассматриваемого объекта.
На КА дополнительно к имеющимся на нем штатным радиосредствам размещают средства радиосвязи, приспособленные для обмена данными с вышеупомянутым радиоустройством, размещенным на объекте.
Опишем пример возможных операций, реализующих предлагаемый способ.
Определяют координаты начального местоположения радиоустройства, размещенного на объекте.
Выполняют навигационные измерения, по которым определяют параметры орбиты КА.
Выполняют развороты КА для построения и последующего поддержания ориентации КА, при которой подстилающая поверхность пересекает диаграммы направленности (с требуемым значением коэффициента усиления - требуемой плотностью мощности излучения на передачу и требуемой чувствительностью на прием) антенн средств радиосвязи КА, приспособленных для обмена данными с радиоустройством, размещенным на объекте, при этом зоны видимости передающей и приемной антенн КА, образуемые сечением диаграмм направленности антенн подстилающей поверхностью, имеют размер, не менее требуемого -необходимого и достаточного для обеспечения радиосвязи между КА и радиоустройством с заданной регулярностью: в течение заданного количества суток выполняются условия для реализации не менее чем заданного (требуемого для обеспечения необходимой частоты обновления данных о движении объекта) количества сеансов связи с не менее чем заданной (требуемой для передачи необходимого объема передаваемый в сеансе данных) продолжительностью сеанса. Например, осуществляется построение ориентации КА, при которой центральные точки зон видимости передающей и приемной антенн КА расположены не далее чем на задаваемых расстояниях от трассы КА и от подспутниковой точки КА и проекции центральных точек зон видимости передающей и приемной антенн КА на линию трассы КА расположены не далее чем на задаваемых расстояниях от подспутниковой точки КА (с учетом знака отсчета данной проекции). Например, при условии положительного отчета расстояния от подспутниковой точки КА вдоль трассы КА в сторону направления полета, расстояние от подспутниковой точки КА до проекции центральной точки зоны видимости передающей антенны КА на линию трассы КА превышает расстояние от подспутниковой точки КА до проекции центральной точки зоны видимости приемной антенны КА на линию трассы КА (выполнение данного условия обеспечивает, в частности, последовательное вхождение радиоустройства, размещенного на объекте, в зоны видимости передающей и приемной антенн КА).
Используя наземные технические средства (например, через съемные носители информации или по беспроводной связи) осуществляют передачу в блок управления радиоустройства, размещенного на объекте, следующих данных:
- данных параметров орбиты КА (начальные значения параметров орбиты КА);
- данных, определяющих задаваемые моменты времени Топр, в которые осуществляют определение координат местоположения радиоустройства по принятым радиоустройством радиочастотным сигналам от спутников системы спутниковой навигации. Например, такие данные могут включать частоту или промежутки времени между моментами определения координат, количество моментов определения координат и время отсчета данных моментов от задаваемого времени и т.д.
Осуществляют прием радиоустройством, размещенным на объекте, радиочастотных сигналов от спутников системы спутниковой навигации, по которым определяют текущие координаты местоположения радиоустройства.
В блоке управления радиоустройства, размещенного на объекте, по данным параметров орбиты КА и координатам местоположения радиоустройства определяют интервалы времени И1, в течение которых радиоустройство находится в зоне видимости передающей антенны КА - покрывается ее диаграммой направленности с требуемым значением коэффициента усиления (требуемой плотностью мощности излучения).
В заданные моменты времени Топр - не менее чем для задаваемого количества моментов (≥3), взятых через задаваемые промежутки времени, осуществляют прием радиоустройством, размещенным на объекте, радиочастотных сигналов от спутников системы спутниковой навигации, по которым осуществляют определение координат местоположения радиоустройства и запоминают определенные координаты и моменты времени, на которые выполнено их определение, в блоке управления радиоустройством.
На КА (или в ЦУП КА) по данным параметров орбиты КА и номинальным координатам местоположения объекта определяют интервалы времени, в течение которых объект находится в зоне видимости передающей антенны КА, и в данные интервалы времени выполняют передачу с КА (средствами радиосвязи КА) радиочастотного сигнала, содержащего данные параметров орбиты КА.
С моментов начала определенных в блоке управления радиоустройства интервалов времени И1, в течение которых радиоустройство находится в зоне видимости передающей антенны КА, осуществляют прием радиоустройством, размещенным на объекте, радиочастотного сигнала, передаваемого с КА и содержащего текущие данные параметров орбиты КА.
Осуществляют прием радиоустройством радиочастотных сигналов от спутников системы спутниковой навигации, по которым определяют текущие координаты местоположения радиоустройства.
В блоке управления радиоустройства по данным параметров орбиты КА и координатам местоположения радиоустройства определяют интервалы времени И2, в течение которых размещенное на объекте радиоустройство находится в зоне видимости приемной антенны КА - покрывается ее диаграммой направленности с требуемым значением коэффициента усиления (требуемой чувствительностью). Зону видимости антенны КА определяет сечение диаграммы направленности антенны (с требуемым значением коэффициента усиления) подстилающей поверхностью. Поскольку возможности передачи сигнала радиоустройством, размещенным на объекте, ограничены возможностями автономного источника питания, то зона видимости предназначенной для его приема приемной антенны КА как правило менее зоны видимости передающей антенны КА.
В моменты времени данных определенных интервалов времени И2 выполняют передачу радиоустройством, размещенным на объекте, радиочастотного сигнала, содержащего определенные (запомненные) координаты местоположения радиоустройства и моменты времени, на которые выполнено определение данных координат, и осуществляют прием этого радиочастотного сигнала средствами радиосвязи КА.
Далее выполняют следующую повторяющуюся последовательность действий.
В блоке управления радиоустройства (после завершения радиоустройством сеанса передачи информации) по данным параметров орбиты КА и координатам местоположения радиоустройства определяют следующие прогнозируемые интервалы времени И1 нахождения радиоустройства в зоне видимости передающей антенны КА (которые будут использоваться для реализации следующих сеансов приема данных радиоустройством). На время до наступления следующего интервала времени нахождения радиоустройства в зоне видимости передающей антенны КА радиоустройство переводят в режим низкого потребления энергии (энергосберегающий режим функционирования).
Выполняют целевую обработку переданной радиоустройством и полученной на КА информации, в результате которой по полученным координатам местоположений радиоустройства, размещенного на объекте, и моментам времени, на которые выполнено их определение, определяют параметры движения объекта (скорость, ускорение и т.д.). Целевая обработка полученных на КА данных может быть выполнена как непосредственно на КА, так и на Земле - в этом случае выполняют передачу принятой на КА информации на Землю (в ЦУП или наземный центр обработки данных) по штатному радиоканалу связи КА с Землей.
В заданные моменты времени Топр - не менее чем для задаваемого количества моментов, взятых через задаваемые промежутки времени, осуществляют прием радиоустройством, размещенным на объекте, радиочастотных сигналов от спутников системы спутниковой навигации, по которым осуществляют определение координат местоположения радиоустройства и запоминают определенные координаты и моменты времени, на которые выполнено их определение, в блоке управления радиоустройством.
Выполняют навигационные измерения, по которым определяют текущие параметры орбиты КА.
Выполняют развороты КА для построения и последующего поддержания ориентации КА, при которой подстилающая поверхность пересекает диаграммы направленности антенн средств радиосвязи КА, приспособленных для обмена данными с радиоустройством, размещенным на объекте.
На КА (или в ЦУП КА) по данным параметров орбиты КА и координатам местоположения размещенного на объекте радиоустройства определяют прогнозируемые интервалы времени, в течение которых радиоустройство находится в зоне видимости передающей антенны КА.
С момента начала определенного интервала времени нахождения радиоустройства в зоне видимости передающей антенны КА выполняют передачу с КА (средствами радиосвязи КА) радиочастотного сигнала, содержащего данные параметров орбиты КА.
С моментов начала определенных в блоке управления радиоустройства интервалов времени И1, в течение которых радиоустройство находится в зоне видимости передающей антенны КА, осуществляют прием радиоустройством, размещенным на объекте, радиочастотного сигнала, передаваемого с КА и содержащего текущие данные параметров орбиты КА.
Осуществляют прием радиоустройством радиочастотных сигналов от спутников системы спутниковой навигации, по которым определяют текущие координаты местоположения радиоустройства.
В блоке управления радиоустройства, размещенного на объекте, по данным параметров орбиты КА и координатам местоположения радиоустройства определяют начало интервала времени, в течение которого радиоустройство находится в зоне видимости приемной антенны КА, и начиная с этого времени выполняют передачу радиоустройством радиочастотного сигнала, содержащего определенные (запомненные) координаты местоположения радиоустройства и моменты времени, на которые выполнено определение данных координат, и осуществляют прием этого радиочастотного сигнала средствами радиосвязи КА.
Далее повторяют описанную последовательность действий, реализуя требуемое определение параметров движения объекта.
Отметим, что отличие в реализации первого и последующих сеансов приема информации радиоустройством состоит в следующем: при выполнении первого и последующих сеансов приема информации радиоустройством время нахождения радиоустройства в зоне видимости передающей антенны космического аппарата определяют по параметрам орбиты космического аппарата, соответственно переданным наземными техническими средствами (при реализации первого сеанса) и принятым радиоустройством в предыдущем сеансе приема информации с космического аппарата (при реализации последующих сеансов).
Отметим, что для реализации возможности определения параметров движения объекта на продолжительном временном интервале, определяемом возможностью поддержания продолжительной работоспособности радиоустройства за счет экономии ресурса его автономного питания, на всех интервалах времени между моментами выполнения энергоемких операций при функционировании радиоустройства (операций приема данных, передачи данных, определения координат с использованием системы спутниковой навигации) радиоустройство переводят в режим низкого потребления энергии (энергосберегающий режим функционирования).
Отметим, что данные, определяющих задаваемые моменты времени Топр, в которые осуществляют определение координат местоположений радиоустройства, размещенного на объекте, по принятым радиоустройством радиочастотным сигналам от спутников системы спутниковой навигации, могут быть уточнены по результатам определения текущих (фактических на текущий момент времени) значений определяемых параметров движения объекта. В общем случае требования к задаваемым моментам времени Топр, в которые осуществляют определение координат местоположений радиоустройства, размещенного на объекте, по принятым радиоустройством радиочастотным сигналам от спутников системы спутниковой навигации, определяют исходя из требований точности определения указанных координат и требований точности определения и прогнозирования по ним параметров движения объекта. Передачу новых значений указанных данных в блок управления радиоустройства, размещенного на объекте, осуществляют при выполнении очередного сеанса передачи информации с КА на данное радиоустройство.
Отметим, что для повышения точности определения параметров движения объекта наряду с определением координат местоположения радиоустройства (средствами спутниковой навигации) в точке месторасположения радиоустройства измеряют температуру среды (размещаемыми на объекте совместно с радиоустройством средствами измерения температуры). При этом при выполнении действий способа выполняют передачу радиоустройством радиосигнала, содержащего координаты местоположения радиоустройства, определенные для задаваемого количества моментов через задаваемые промежутки времени, измеренную в точке местоположения радиоустройства температуру среды и моменты времени, на которые выполнено определение данных координат и температуры, выполняют прием данного радиосигнала на космическом аппарате (с последующей возможной передачей полученной информации на Землю) и параметры движения объекта определяют по принятым координатам местоположения радиоустройства, температуре и моментам времени, на которые выполнено их определение. Например, по измеренным значениям температуры в точке местоположения радиоустройства определяют зависимость параметров скорости радиоустройства от характеристик температуры и применяют данную зависимость при расчете параметров движения объекта (определяемых по параметрам движения размещенного на объекте радиоустройства) для моментов времени, следующих за последним моментом определения принятых координат местоположения радиоустройства, с учетом определяемой (прогнозируемой) температуры среды на объекте.
Опишем технический эффект предлагаемого изобретения.
Предлагаемое техническое решение обеспечивает использование высокоточных данных спутниковой навигации для определения параметров движения объекта преимущественно смещающихся природных масс ледника и оползня.
Выполнение определения координат местоположений радиоприемопередающего устройства (по принятым этим устройством радиочастотным сигналам от спутников системы спутниковой навигации) менее чем для задаваемого количества моментов времени, взятых через задаваемые промежутки времени непосредственно перед сеансом передачи данных координат на КА, обеспечивает наличие необходимого объема данных для максимально точного определения параметров движения объекта.
В отличие от прототипа, в котором для определения параметров движения объекта используют измерения от оптической аппаратуры наблюдения, получение которых существенно ограничено необходимостью выполнения требуемых условий-ограничений на удаление объекта съемки от трассы КА, освещенность объекта, метеоусловия, в предлагаемом способе используют измерения координат по сигналам от спутников системы спутниковой навигации, получение которых не зависит от подобных ограничений.
Предлагаемое техническое решение обеспечивает возможность осуществление дистанционного определения параметров движения объекта с высочайшей точностью, обеспечиваемой возможностями спутниковой навигации.
Также предлагаемое техническое решение обеспечивает возможность осуществления определения параметров движения объекта на продолжительном временном интервале, определяемом возможностью поддержания продолжительной работоспособности радиоустройства за счет экономии ресурса его автономного питания. Максимально-возможная экономия ресурса автономного питания радиоустройства обеспечивается путем перевода радиоустройство в режим низкого потребления энергии (энергосберегающий режим функционирования) на всех интервалах времени между моментами выполнения энергоемких операций при функционировании радиоустройства (операций приема данных, передачи данных, определения координат с использованием системы спутниковой навигации).
В настоящее время технически все готово для реализации предложенного способа. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств.
Изобретение относится к способам определения параметров движения объектов, в частности смещающихся природных масс ледника и оползня. Сущность: выполняют построение и поддержание задаваемой ориентации космического аппарата, снабженного радиоприемопередающими средствами. Измеряют параметры орбиты космического аппарата и определяют по ним моменты времени прохождения космического аппарата над объектом. Определяют параметры движения объекта по получаемым аппаратурным данным. Дополнительно по радиосигналам от спутников системы спутниковой навигации, принятым размещенным на объекте приемопередающим радиоустройством, определяют координаты местоположения радиоустройства. По определенным координатам с учетом значений параметров орбиты космического аппарата определяют время нахождения радиоустройства в зоне видимости передающей антенны космического аппарата. В течение данного времени выполняют прием радиоустройством передаваемого с космического аппарата радиосигнала с текущими значениями параметров орбиты. По параметрам орбиты и определенным текущим координатам местоположения радиоустройства определяют время нахождения радиоустройства в зоне видимости приемной антенны космического аппарата. В течение данного времени выполняют передачу радиоустройством радиосигнала с координатами местоположения радиоустройства, определенными для задаваемого количества моментов через задаваемые промежутки времени, и значения моментов времени, на которые выполнено определение данных координат. Выполняют прием данного радиосигнала на космическом аппарате. Параметры движения объекта определяют по принятым координатам местоположения радиоустройства и моментам времени, на которые выполнено их определение. Технический результат: повышение точности определения параметров движения объекта. 1 ил.
Способ определения с орбитального космического аппарата параметров движения объекта преимущественно смещающихся природных масс ледника и оползня, включающий построение и поддержание задаваемой ориентации космического аппарата, снабженного радиоприемопередающими средствами, определение по измеренным параметрам орбиты космического аппарата моментов времени прохождения космического аппарата над объектом и определение параметров движения объекта по получаемым аппаратурным данным, отличающийся тем, что дополнительно по радиосигналам от спутников системы спутниковой навигации, принятым размещенным на объекте приемопередающим радиоустройством, определяют координаты местоположения радиоустройства, по которым с учетом значений параметров орбиты космического аппарата определяют время нахождения радиоустройства в зоне видимости передающей антенны космического аппарата, в течение которого выполняют прием радиоустройством передаваемого с космического аппарата радиосигнала с текущими значениями параметров орбиты, по которым с учетом определенных текущих координат местоположения радиоустройства определяют время нахождения радиоустройства в зоне видимости приемной антенны космического аппарата, в течение которого выполняют передачу радиоустройством радиосигнала с координатами местоположения радиоустройства, определенными для задаваемого количества моментов через задаваемые промежутки времени, и значения моментов времени, на которые выполнено определение данных координат, выполняют прием данного радиосигнала на космическом аппарате и параметры движения объекта определяют по принятым координатам местоположения радиоустройства и моментам времени, на которые выполнено их определение.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАБЛЮДАЕМОГО С КОСМИЧЕСКОГО АППАРАТА ЛЕДНИКА | 2016 |
|
RU2643224C2 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ФРОНТАЛЬНОЙ ЧАСТИ ЛЕДНИКА С НАХОДЯЩЕГОСЯ НА ОКОЛОКРУГОВОЙ ОРБИТЕ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2644039C2 |
| CN 108919262 A, 30.11.2018. | |||

