Изобретение относится к области геодезии, может быть применено при наблюдениях за смещениями оползней, топографической съемки местности, а также в любом другом виде геодезических работ, где требуется определение пространственного положения недоступного для прямой видимости геодезического пункта.
Известен створный метод геодинамических наблюдений за смещениями оползней (Григоренко, А.Т. Измерение смещений оползней / А.Т. Григоренко. - М.: Недра, 1988. - с. 42). Закрепляют створ двумя опорными реперами вне зоны влияния оползня так, чтобы створ располагался перпендикулярно направлению движения оползня. В теле оползня в створе двух закрепленных ранее опорных реперов закрепляют рабочие реперы. Путем цикличных измерений расстояний от каждого из рабочих реперов до линии створа, либо путем измерения горизонтальных углов между направлением, задаваемым с одного опорного репера на другой, и направлением на каждый рабочий репер, либо измерением расстояний между рабочими реперами определяют величину смещения оползня.
Недостатком этого способа является получение сведений только о горизонтальных смещениях оползня, необходимость наличия сведений о направлении движения оползня, низкая точность линейных измерений при использовании рулеток, либо необходимость наличия прямой видимости между опорными и рабочими реперами в случае измерения горизонтальных углов между направлением на смежный опорный репер и рабочий репер.
Известен способ геометрического нивелирования при наблюдениях за смещениями оползней (Григоренко, А.Т. Измерение смещений оползней / А.Т. Григоренко. - М.: Недра, 1988. - с. 50). Выполняют нивелирование горизонтальным лучом из середины между опорными и рабочими реперами путем последовательных взятий отсчетов по рейке, установленной на опорном репере, а также отсчетов по рейке, установленной на каждом из рабочих реперов. По разнице полученных отсчетов вычисляют превышение между пунктами, вычисляют высоты пунктов и, впоследствии, определяют вертикальное смещение оползня по разностям высот.
Недостатком этого способа является получение сведений только о вертикальных смещениях оползня, а также необходимость наличия прямой видимости между местом установки прибора и установленными отвесно над рабочими и опорными пунктами нивелирными рейками. Кроме того, при способе геометрического нивелирования в случае большой крутизны склона потребуются промежуточные места установки нивелира, что может повлечь за собой увеличение величин погрешностей определения смещений оползня.
Известен способ контроля с орбитального космического аппарата движения потенциально опасного объекта, преимущественно ледника и оползня (патент RU №2763169, опубл. 28.12.2021 г.). По радиосигналам от спутников системы спутниковой навигации, принятым размещенным на потенциально опасном объекте (ПОО) приемо-передающим радиоустройством определяют координаты радиоустройства (РУ), по которым с учетом значений параметров орбиты космического аппарата (КА) определяют время нахождения РУ в зоне видимости передающей антенны КА. Выполняют прием РУ передаваемого с КА сигнала с текущими значениями параметров орбиты. По параметрам орбиты и определенным текущим координатам РУ определяют время нахождения РУ в зоне видимости приемной антенны КА. Передают с РУ на КА сигнал с временами и координатами РУ, определенными для задаваемого количества моментов через задаваемые промежутки времени. Определяют параметры движения ПОО и прогнозируют наиболее ранний момент, когда ПОО предположительно достигнет наземного пункта.
Недостатком этого метода является необходимость наличия радиовидимости между РА и КУ, что является затруднительным в случае наличия густой растительности, деревьев на оползневом склоне. Точность определения смещений оползня спутниковыми методами ниже, чем линейно-угловыми измерениями.
Известен способ мониторинга за опасными геодинамическими процессами (патент RU №2467287, опубл. 20.11.2012 г.). На оползневом участке на определенном расстоянии друг от друга устанавливают реперы, по которым судят о направлении и скорости движения грунта. Реперы дополнительно оборудуют деформируемым пластиковым цилиндром, каждый из которых укладывают в грунт по всему периметру оползня. В процессе движения грунтовых масс оползневого участка изменяется давление внутри секций деформируемого пластикового цилиндра, заполненных жидкостью, что отображается на датчиках давления, установленных на герметичных заглушках каждой секции деформируемого пластикового цилиндра. Данные с датчиков давления передаются по каналу связи в пункт приема и хранения информации, что позволяет оперативно реагировать на вновь выявленные движения земляных масс. Наличие реперов позволяет вести оптический контроль за изменением их пространственного положения.
Недостатком метода является низкая точность определения пространственных смещений оползня оптическим контролем пространственных положений реперов и, как следствие, низкой точностью определения смещений оползня. Датчики давления, устанавливаемые внутри секций пластикового цилиндра в грунт, способны лишь передать информацию о наличии смещения оползня, но не о величине или направлении смещений оползня.
Известен дистанционно-угловой метод геодинамических наблюдений за смещениями оползней (Григоренко, А.Т. Измерение смещений оползней / А.Т. Григоренко. - М.: Недра, 1988. - с. 32), принятый за прототип. Линейно-угловые измерения выполняют непосредственно с опорных реперов, закрепленных вне зоны влияния оползня, путем установки над одним из них угломерного прибора, дальнейшего измерения горизонтального и вертикального углов между произвольно выбранным ориентирным направлением и рабочим репером, закрепленным в теле оползня, а также путем измерения расстояния между местом установки прибора и рабочим репером, закрепленным в теле оползня. В качестве цели для наведения либо используют веху с отражателем, которую устанавливают острием на рабочий репер и на время наблюдений удерживают в отвесном положении, либо устанавливают марку или призменный отражатель на штатив отвесно над рабочим репером, либо выполняют наблюдения непосредственно на рабочий репер. По формулам полярной засечки и тригонометрического нивелирования вычисляют пространственное положение рабочего репера. Данный порядок действий выполняют многократно с периодичностью, задаваемой в зависимости от скорости оползневых смещений. По полученному набору пространственных положений рабочего репера в разные периоды времени вычисляют расстояние между двумя положениями рабочего репера в периоды времени, когда выполнялись наблюдения, и, таким образом, определяют величину смещений оползня за период времени между наблюдениями.
Недостатком этого способа при наблюдениях на веху с отражателем является низкая точность приведения вехи с отражателем в отвесное положение с помощью круглого уровня, а также необходимость в наличии прямой видимости между местом установки прибора и отражателем на вехе.
Низкая точность приведения вехи с отражателем в отвесное положение с помощью круглого уровня снижает точность определения пространственных положений рабочих реперов и, как следствие, снижает точность определения смещений оползня.
Отсутствие прямой видимости может быть обусловлено случившимися деформационными процессами, а также особенностями ситуации или рельефа в месте проведения работ, что приводит к невозможности выполнения наблюдений, нарушению их периодичности и, как следствие, искажению интерпретации процесса смещений оползня. Расчет поправок за редукцию визирной цели с целью исключения прямого наведения может повлечь за собой появление дополнительных величин погрешностей определения положения рабочего репера, и, как следствие погрешностей определения смещений оползня.
Техническим результатом является повышение точности определения пространственных смещений оползня и возможность их определения при отсутствии прямой видимости.
Технический результат достигается тем, что устанавливают первое положение вехи с отражателем при этом она отклонена от отвесного положения на величину 45°, выполняют линейно-угловые измерения электронным тахеометром при первом положении вехи при этом фиксируют горизонтальный и вертикальный углы между произвольно выбранным ориентирным направлением и положением узловой точки отражателя и наклонное расстояние между местом установки электронного тахеометра и положением узловой точки отражателя, далее повторяют измерения после каждого изменения установки вехи, во втором положении при повороте на 120° относительно предыдущего положения по дуге вокруг рабочего репера, без изменения величины наклона, в третьем - при повороте на 120° относительно предыдущего положения по дуге вокруг рабочего репера, без изменения величины наклона, и в четвертом - при котором веху отклоняют от отвесного положения на величину 10°, после этого четыре пространственных положения узловой точки призменного отражателя аппроксимируют сферой по методу наименьших квадратов и вычисляют центр этой сферы, которое совпадает с положением рабочего репера, по величине отклонения вычисленного радиуса сферы от значения высоты вехи оценивают среднюю квадратическую погрешность определения положения рабочего репера, по величине, которой судят о точности определения смещений оползня, затем полученному набору пространственных положений рабочего репера в разные периоды времени вычисляют расстояние между двумя положениями рабочего репера в периоды времени, когда выполнялись наблюдения, и определяют величину смещений оползня за период времени между наблюдениями.
Способ поясняется следующими фигурами:
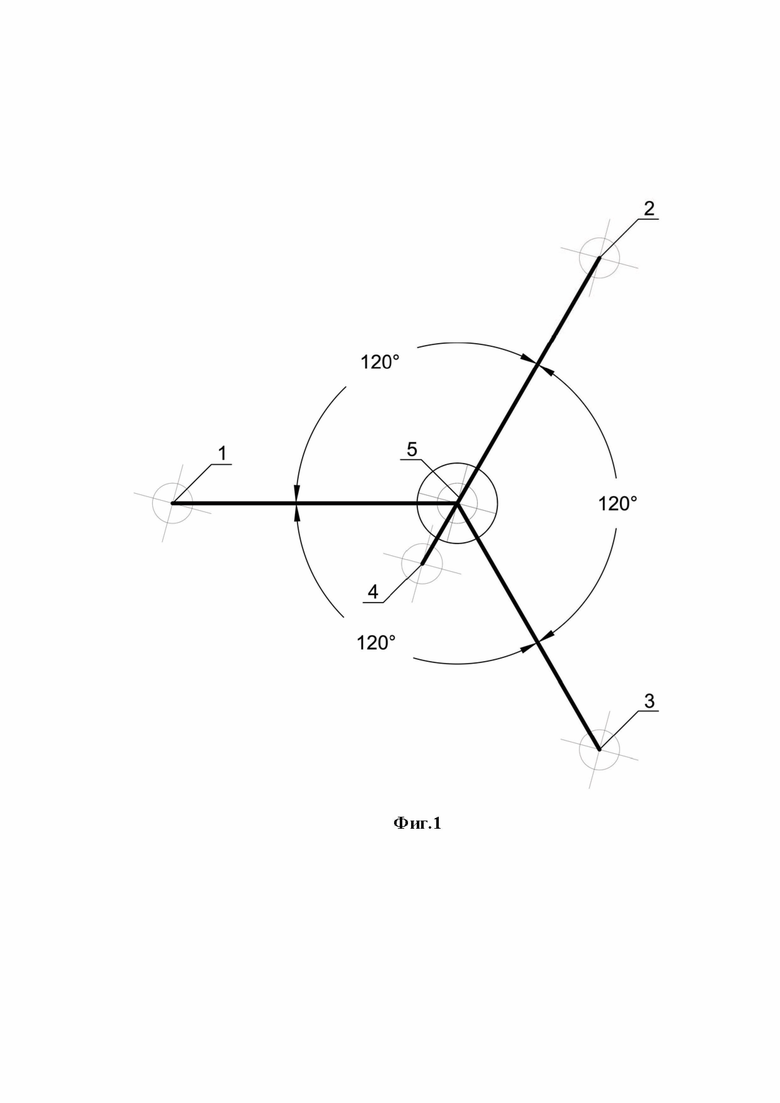
фиг. 1 - схема расположения вехи при наблюдениях, вид сверху;
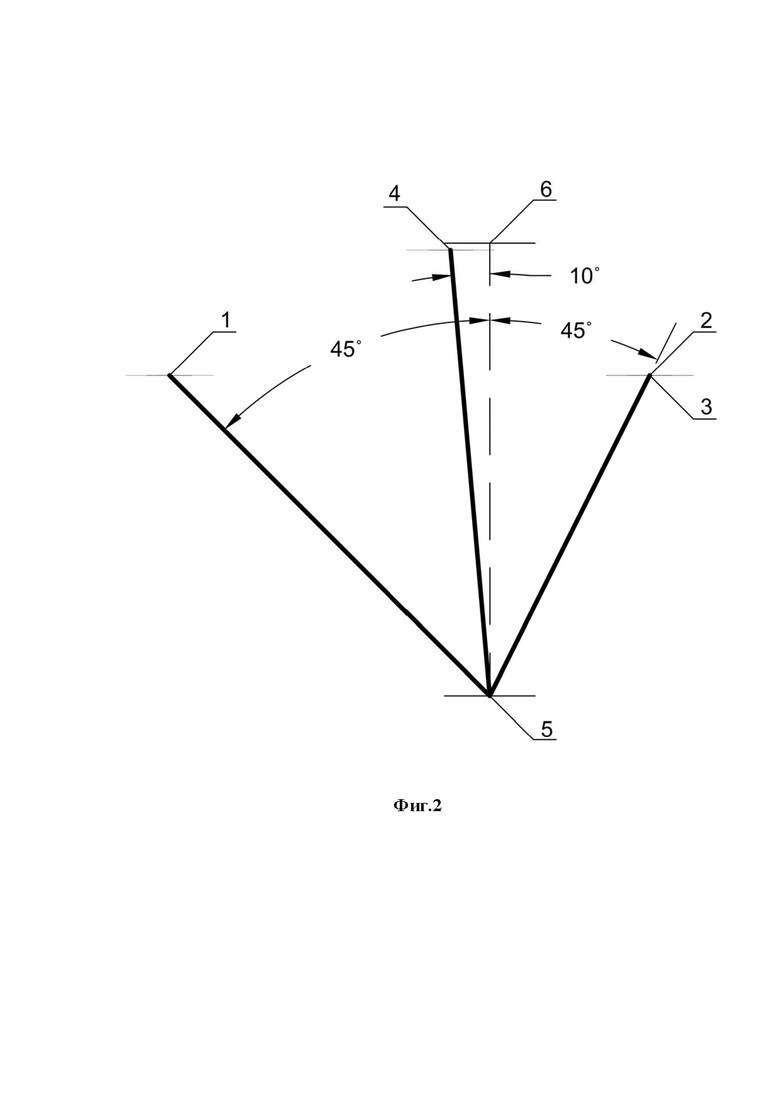
фиг. 2 - схема расположения вехи при наблюдениях, вид спереди;
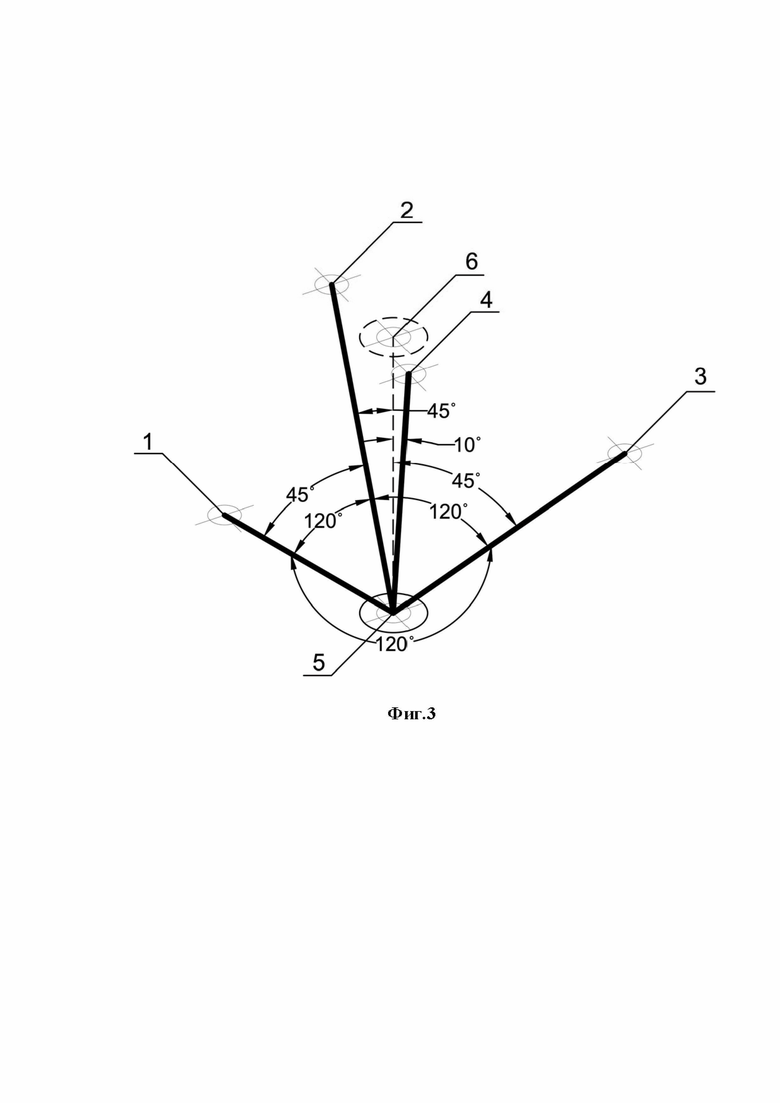
фиг. 3 - схема расположения вехи при наблюдениях, юго-западная изометрия, где:
1 - первое положение вехи с отражателем;
2 - второе положение вехи с отражателем;
3 - третье положение вехи с отражателем;
4 - четвертое положение вехи с отражателем;
5 - рабочий репер;
6 - отвесное положение вехи.
Способ осуществляют следующим образом. Электронный тахеометр устанавливают над опорным репером вне зоны влияния оползня. Острие вехи с закрепленным на ней призменным отражателем устанавливают на рабочий репер в теле оползня. Устанавливают первое положение вехи с отражателем (1, фиг. 1-3) при котором веха отклонена от отвесного положения на величину 45°. Выполняют линейно-угловые измерения при первом положении вехи с отражателем с применением электронного тахеометра, в процессе которых фиксируют горизонтальный и вертикальный углы между произвольно выбранным ориентирным направлением и положением узловой точки отражателя, а также наклонное расстояние между местом установки электронного тахеометра и положением узловой точки отражателя. Далее, устанавливают второе положение вехи с отражателем (2, фиг. 1-3), путем поворота вехи на 120° относительно предыдущего положения вехи по дуге вокруг рабочего репера, без изменения величины наклона вехи, после чего выполняют линейно-угловые измерения при втором положении вехи с отражателем. Затем, устанавливают третье положение вехи с отражателем (3, фиг. 1-3) поворотом вехи на 120° относительно ее предыдущего положения по дуге вокруг рабочего репера, без изменения величины наклона вехи, после чего выполняют линейно-угловые измерения при третьем положении вехи с отражателем. После этого, устанавливают четвертое положение вехи с отражателем (4, фиг. 1-3), при котором веху отклоняют от отвесного положения на величину 10° и выполняют линейно-угловые измерения при четвертом положении вехи с отражателем. По полученным в результате линейно-угловых измерений значениям горизонтальных, вертикальных углов и расстояний вычисляют пространственные координаты четырех положений узловой точки призменного отражателя по формулам полярной засечки и тригонометрического нивелирования. Далее, четыре пространственных положения узловой точки призменного отражателя аппроксимируют сферой по методу наименьших квадратов и вычисляют центр этой сферы. Вычисленное положение центра сферы геометрически совпадает с положением рабочего репера. По величине отклонения вычисленного радиуса сферы от значения высоты вехи оценивают среднюю квадратическую погрешность определения положения рабочего репера данным способом по величине которой судят о точности определения смещений оползня. Данный порядок действий выполняют многократно с периодичностью, задаваемой в зависимости от скорости оползневых смещений, например, один раз в месяц. По полученному набору пространственных положений рабочего репера в разные периоды времени вычисляют расстояние между двумя положениями рабочего репера в периоды времени, когда выполнялись наблюдения, и, таким образом, определяют величину смещений оползня за период времени между наблюдениями.
Способ поясняется следующими примерами.
В случае применения дистанционно-углового метода геодинамических наблюдений за смещениями оползней и установке вехи с отражателем в отвесное положение с использованием круглого уровня, одним из факторов, влияющих на точность определения смещений оползня, может являться цена деления круглого уровня вехи. При цене деления круглого уровня вехи 10', высоте вехи 2 м, погрешность определения положения пункта за неотвесное положение в плане составит 5,8 мм, а для уровней с ценой деления 20' погрешность составит уже 11,6 мм. Погрешность по высоте, при этом, будет ничтожно малой и не окажет влияния на результат. В случае наблюдений смещений оползня, погрешность определения смещений оползня при таких погрешностях определения положения пункта составит 8,2 мм и 16,4 мм соответственно.
В случае применения способа определения смещений оползня линейно-угловыми измерениями на отражатель с принудительными отклонениями, при использовании электронного тахеометра Sokkia CX-103, установленного на пункте принудительного центрирования, призменного отражателя Leica GMP111 в комплекте с вехой, длиной 1 м, установленной на определяемых пунктах - кернах в стальной конструкции, при различных удалениях пунктов от прибора, равных 8,7 м, 13,9 м, 21,3 м, погрешности определения положения каждого из пунктов в пространстве составили 0,6 мм, 1,0 мм и 4,8 мм соответственно. В случае наблюдений смещений оползня, погрешность определения смещений оползня при таких погрешностях определения положения пункта составит 0,8 мм, 1,4 мм и 6,8 мм соответственно.
При использовании призменного отражателя Sokkia PPS-3050 на удалении от места установки прибора, равном 8,7 м погрешность определения положения пункта в пространстве составила 1,6 мм. В случае наблюдений смещений оползня, погрешность определения смещений оползня при таких погрешностях определения положения пункта составит 2,3 мм.
При использовании штатива и установке прибора на бетонное основание, удалении пунктов - кернов в бетонном основании, на расстояния 9,3 м, 29,5 м и 54,7 м, использовании отражателя Vega SP02T, погрешности определения положения каждого из пунктов в пространстве составили 3,3 мм, 4,4 мм и 4,5 мм соответственно. В случае наблюдений смещений оползня, погрешность определения смещений оползня при таких погрешностях определения положения пункта составит 4,7 мм, 6,2 мм и 6,3 мм соответственно.
Применение способа определения смещений оползня линейно-угловыми измерениями на отражатель с принудительными отклонениями вехи от отвесного положения метода позволяет определять смещения оползня в среднем точнее на 20%, чем в случае применения дистанционно-углового метода геодинамических наблюдений за смещениями оползней и установке вехи с отражателем в отвесное положение с использованием круглого уровня.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ЗОН ГЕОДИНАМИЧЕСКОГО РИСКА НА ОСНОВЕ ДАННЫХ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2506606C1 |
| Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки | 2016 |
|
RU2644999C2 |
| СПОСОБ МОНИТОРИНГА ЗА ОПАСНЫМИ ГЕОДИНАМИЧЕСКИМИ ПРОЦЕССАМИ | 2011 |
|
RU2467287C2 |
| Способ передачи ориентирования | 2021 |
|
RU2761934C1 |
| Способ прямой векторной засечки | 2020 |
|
RU2735311C1 |
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| Способ определения опасных деформаций борта глубокого карьера | 1983 |
|
SU1121430A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
Изобретение относится к области геодезии, может быть применено при наблюдениях за смещениями оползней. Способ определения смещений оползня включает выполнение измерений непосредственно с опорных реперов, закреплённых вне зоны влияния оползня, установку над одним из них угломерного прибора, дальнейшие измерения горизонтального и вертикального углов между произвольно выбранным ориентирным направлением и рабочим репером, закреплённым в теле оползня, измерение расстояния между местом установки прибора и рабочим репером, закреплённым в теле оползня, причем в качестве цели для наведения используют веху с отражателем, которую устанавливают остриём на рабочий репер, с отклонениями на величину 45°, на величину 10°, при поворотах на 120° относительно предыдущего положения по дуге вокруг рабочего репера, без изменения величины наклона, далее четыре пространственных положения узловой точки призменного отражателя аппроксимируют сферой по методу наименьших квадратов и вычисляют центр этой сферы, который совпадает с положением рабочего репера, по величине отклонения вычисленного радиуса сферы от значения высоты вехи оценивают среднюю квадратическую погрешность определения положения рабочего репера, по величине которой судят о точности определения смещений оползня, затем по полученному набору пространственных положений рабочего репера в разные периоды времени вычисляют расстояние между двумя положениями рабочего репера в периоды времени, когда выполнялись наблюдения, и определяют величину смещений оползня за период времени между наблюдениями. Технический результат - повышение точности определения пространственных смещений оползня при отсутствии прямой видимости. 3 ил.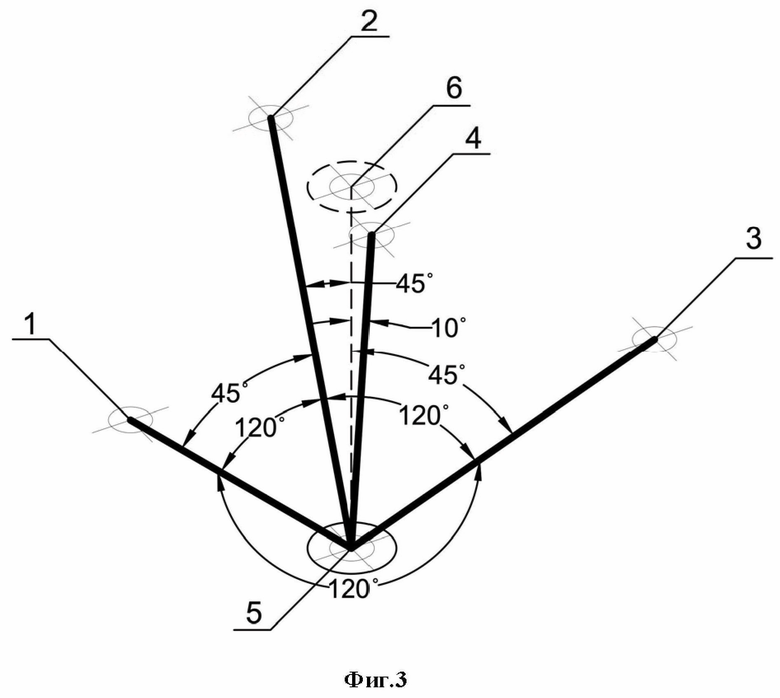
Способ определения смещений оползня, включающий выполнение измерений непосредственно с опорных реперов, закреплённых вне зоны влияния оползня, установку над одним из них угломерного прибора, дальнейшие измерения горизонтального и вертикального углов между произвольно выбранным ориентирным направлением и рабочим репером, закреплённым в теле оползня, измерение расстояния между местом установки прибора и рабочим репером, закреплённым в теле оползня, в качестве цели для наведения в котором используют веху с отражателем, которую устанавливают остриём на рабочий репер, отличающийся тем, что устанавливают первое положение вехи с отражателем, при этом она отклонена от отвесного положения на величину 45°, выполняют линейно-угловые измерения электронным тахеометром при первом положении вехи, при этом фиксируют горизонтальный и вертикальный углы между произвольно выбранным ориентирным направлением и положением узловой точки отражателя и наклонное расстояние между местом установки электронного тахеометра и положением узловой точки отражателя, далее повторяют измерения после каждого изменения установки вехи, во втором положении при повороте на 120° относительно предыдущего положения по дуге вокруг рабочего репера, без изменения величины наклона, в третьем - при повороте на 120° относительно предыдущего положения по дуге вокруг рабочего репера, без изменения величины наклона, и в четвертом - при котором веху отклоняют от отвесного положения на величину 10°, после этого четыре пространственных положения узловой точки призменного отражателя аппроксимируют сферой по методу наименьших квадратов и вычисляют центр этой сферы, который совпадает с положением рабочего репера, по величине отклонения вычисленного радиуса сферы от значения высоты вехи оценивают среднюю квадратическую погрешность определения положения рабочего репера, по величине которой судят о точности определения смещений оползня, затем по полученному набору пространственных положений рабочего репера в разные периоды времени вычисляют расстояние между двумя положениями рабочего репера в периоды времени, когда выполнялись наблюдения, и определяют величину смещений оползня за период времени между наблюдениями.
| Григоренко А.Т | |||
| Измерение смещений оползней / А.Т | |||
| Григоренко | |||
| - М.: Недра, 1988 | |||
| - с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| СПОСОБ КОНТРОЛЯ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА ДВИЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО ОБЪЕКТА, ПРЕИМУЩЕСТВЕННО ЛЕДНИКА И ОПОЛЗНЯ | 2020 |
|
RU2763169C1 |
| СПОСОБ МОНИТОРИНГА ЗА ОПАСНЫМИ ГЕОДИНАМИЧЕСКИМИ ПРОЦЕССАМИ | 2011 |
|
RU2467287C2 |
| Устройство для удаления газов, образующихся при электросварке | 1975 |
|
SU559074A2 |
| RU 2006132411 A, 20.03.2008 | |||
| Кузин А.А | |||
| Координатный метод при наблюдениях за оползнеопасными склонами: оценка влияния угловых и линейных точностей измерения прибором = | |||

