Область изобретения
Настоящее изобретение относится к устройствам для инъекции лекарственного препарата.
Предпосылки изобретения
Существует множество заболеваний, при которых требуется регулярное лечение в форме инъекций лекарственного препарата. Такую инъекцию можно выполнять при помощи устройств для инъекции, применяемых либо медперсоналом, либо самими пациентами. Например, диабет 1-го и 2-го типа может лечиться самими пациентами путем инъекции доз инсулина, например, один или более раз в день. Например, в качестве устройства для инъекции может использоваться предварительно наполненная одноразовая шприц-ручка для инсулина. Альтернативно может использоваться многоразовая шприц-ручка. Многоразовая шприц-ручка допускает возможность замены пустого картриджа с лекарственным препаратом новым. К каждой шприц-ручке может прилагаться набор одноразовых игл, которые меняют перед каждым использованием. Тогда подлежащая введению доза инсулина может, например, выбираться вручную на шприц-ручке для инсулина путем поворачивания ручки дозировки и наблюдения за фактической дозой в окне дозировки или на дисплее шприц-ручки для инсулина. Затем дозу вводят, вставляя иглу в подходящий участок кожи и нажимая на кнопку инъекции шприц-ручки для инсулина. Чтобы иметь возможность контроля за введением инсулина, например, чтобы не допустить некорректного использования шприц-ручки для инсулина, или чтобы отслеживать уже принятые дозы, необходимо измерять информацию, связанную с состоянием и/или использованием устройства для инъекции, например информацию о вводимой дозе инсулина.
Краткое описание изобретения
Согласно первому аспекту в настоящем изобретении описывается устройство для инъекции, содержащее: подвижный компонент программирования дозировки, содержащий систему поворотного энкодера, имеющую заданную угловую периодичность; узел датчиков, содержащий первый оптический датчик, выполненный с возможностью обнаружения перемещения подвижного компонента программирования дозировки относительно узла датчиков во время дозирования лекарственного препарата, причем первый оптический датчик выполнен с возможностью работы в режиме строб-дискретизации на первой частоте, и второй оптический датчик, выполненный с возможностью обнаружения перемещения системы поворотного энкодера относительно второго оптического датчика, причем второй оптический датчик выполнен с возможностью работы в режиме строб-дискретизации на второй частоте, меньшей, чем первая частота; и процессорное устройство, выполненное с возможностью определения дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения.
Система поворотного энкодера может быть выполнена с возможностью вращения относительно первого оптического датчика во время режима работы по набору устройства для инъекции.
Система поворотного энкодера может содержать кольцо энкодера, содержащее множество по существу светоотражающих меток, расположенных по окружности вокруг кольца энкодера в соответствии с заданной периодичностью.
Кольцо энкодера может содержать множество по существу светопоглощающих меток, расположенных так, чтобы чередоваться с множеством по существу светоотражающих меток в соответствии с заданной периодичностью.
Боковые края множества по существу светоотражающих меток могут быть наклонены внутрь.
Второй оптический датчик может быть выполнен с возможностью работы в режиме строб-дискретизации на второй частоте, меньшей, чем первая частота.
Первый и второй оптические датчики могут иметь угловое смещение, равное половине заданной угловой периодичности, при этом первый и второй оптические датчики выполнены с возможностью работы в синхронном режиме работы.
Первый и второй оптические датчики могут иметь угловое смещение, которое отличается от половины заданной угловой периодичности, при этом первый и второй оптические датчики выполнены с возможностью работы в поочередном режиме работы со временем смещения между дискретизацией на первом и втором оптических датчиках.
Угловое смещение может быть меньше половины заданной угловой периодичности.
Время смещения может изменяться на основе относительной скорости вращения системы поворотного энкодера относительно первого и второго оптических датчиков.
Время смещения может быть уменьшено в ответ на увеличение относительной скорости вращения.
Устройство для инъекции может дополнительно содержать кнопку инъекции и электрический переключатель, соединенный с узлом датчиков, при этом электрический переключатель выполнен с возможностью подачи питания на узел датчиков в ответ на нажатие кнопки инъекции.
Устройство для инъекции может дополнительно содержать картридж, содержащий лекарственный препарат.
Согласно второму аспекту в настоящем изобретении описывается модуль, выполненный с возможностью использования с устройством для инъекции, содержащим подвижный компонент программирования дозировки с системой поворотного энкодера, или применения в таком устройстве, в частности в устройстве для инъекции, описанном в данном документе, при этом модуль содержит: узел датчиков, содержащий по меньшей мере один оптический датчик, выполненный с возможностью обнаружения перемещения подвижного компонента программирования дозировки устройства для инъекции относительно узла датчиков во время дозирования лекарственного препарата, и коллимирующую оптическую систему, расположенную между по меньшей мере одним оптическим датчиком и подвижным компонентом программирования дозировки; и процессорное устройство, выполненное с возможностью определения дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения.
Коллимирующая оптическая система может содержать одно или более из следующего: одну или более дискретных коллимирующих линз; один или более оптических волноводов.
Дискретная коллимирующая линза может быть расположена между каждым оптическим датчиком и каждым оптическим волноводом и/или между каждым оптическим волноводом и подвижным компонентом программирования дозировки.
Для каждого датчика может быть предусмотрена одна дискретная коллимирующая линза, которая выполнена с возможностью покрытия передающей и/или принимающей частей датчика.
Одна дискретная линза может представлять собой линзовую решетку, покрывающую датчик, в частности микроформованную линзовую решетку.
Один или более оптических волноводов могут иметь форму усеченного конуса, в частности с круглым или эллиптическим основанием.
Согласно третьему аспекту в настоящем изобретении описывается способ обработки сигналов, генерируемых узлом датчиков устройства для инъекции, описанного выше и раскрытого в данном документе, или модулем, описанным выше и раскрытым в данном документе, который содержит узел датчиков с двумя оптическими датчиками, расположенными со сдвигом на 180° таким образом, что сигнал первого датчика из двух датчиков и сигнал второго датчика из двух датчиков находятся в противофазе, при этом способ включает этапы установки верхнего порога и нижнего порога для сигнала первого датчика и для сигнала второго датчика соответственно и подсчета единицы дозы, выбранной с помощью подвижного компонента программирования дозировки, если сигнал второго датчика пересекает верхний порог и после этого пересекает нижний порог, а после этого сигнал первого датчика пересекает нижний порог и после этого пересекает верхний порог.
Этап установки верхнего порога и нижнего порога для сигнала первого датчика и для сигнала второго датчика соответственно может включать этап калибровки, выполняемый во время изготовления модуля для установки верхнего и нижнего порогов, причем этап калибровки включает обеспечение прохождения набора калибровочной геометрии под каждым датчиком на контролируемых расстояниях для калибровки и установку верхнего и нижнего порогов таким образом, чтобы верхний порог всегда находился ниже наибольшего уровня соответствующего сигнала датчика, наблюдаемого во время калибровки, а нижний порог всегда находился ниже наименьшего уровня сигнала, наблюдаемого во время калибровки.
Этап установки верхнего порога и нижнего порога для сигнала первого датчика и для сигнала второго датчика соответственно может включать этапы установки частоты дискретизации для дискретизации сигналов обоих датчиков на более высокий уровень, чем частота дискретизации, используемая для нормальной работы, и дискретизации сигналов во время доставки дозы с помощью устройства для инъекции, содержащего модуль, определения величин по меньшей мере двух последовательных максимального и минимального значений сигналов каждого датчика и установки верхнего порога и нижнего порога для каждого сигнала в процентной доли от определенных величин по меньшей мере двух последовательных максимального и минимального значений, если определенные величины по меньшей мере двух последовательных максимального и минимального значений находятся в пределах заданного диапазона допустимых значений сигнала.
Согласно четвертому аспекту в настоящем изобретении описывается способ обработки сигналов, генерируемых узлом датчиков устройства для инъекции, описанного выше и раскрытого в данном документе, или модулем, описанным выше и раскрытым в данном документе, который содержит узел датчиков с двумя оптическими датчиками, расположенными со сдвигом на 180° таким образом, что сигнал первого датчика из двух датчиков и сигнал второго датчика из двух датчиков находятся в противофазе, при этом способ включает этапы определения первой точки пересечения, когда уровень сигнала второго датчика становится больше, чем уровень сигнала первого датчика, определения второй точки пересечения, когда уровень сигнала первого датчика становится больше уровня сигнала второго датчика, и подсчета единицы дозы, выбранной при определении первой точки пересечения, после определения второй точки пересечения.
Определение точки пересечения, когда уровень сигнала одного датчика становится больше уровня сигнала другого датчика, может включать определение того, что разность уровней сигналов обоих датчиков превышает заданный порог.
Способ может дополнительно включать этап калибровки, выполняемый во время изготовления модуля, для согласования сигналов обоих датчиков по средней величине сигнала и амплитуде сигнала, причем для калибровки обеспечивается прохождение набора калибровочной геометрии под каждым датчиком на контролируемом расстоянии, и ко второму датчику применяются коэффициенты масштабирования для среднего значения и амплитуды для согласования среднего значения и амплитуды его сигнала со средним значением и амплитудой сигнала первого датчика. Альтернативно способ может дополнительно включать этап калибровки, выполняемый после выбора дозы, причем для калибровки сохраняется набор данных для сигналов обоих датчиков, и из сохраненного набора данных ретроспективно вычисляются коэффициенты масштабирования для получения общего среднего значения и амплитуды сигналов обоих датчиков.
Согласно пятому аспекту в настоящем изобретении описывается способ обработки сигналов, генерируемых узлом датчиков устройства для инъекции, описанного выше и раскрытого в данном документе, или модулем, описанным выше и раскрытым в данном документе, который содержит узел датчиков с двумя оптическими датчиками, расположенными со сдвигом на 180° таким образом, что сигнал первого датчика из двух датчиков и сигнал второго датчика из двух датчиков находятся в противофазе, при этом способ включает этапы определения пиковых значений сигналов первого датчика и второго датчика во время выбора дозы и подсчета единицы дозы, выбранной, когда пиковое значение сигнала первого датчика было обнаружено после того, как было обнаружено пиковое значение сигнала второго датчика.
Согласно шестому аспекту в настоящем изобретении описывается устройство для инъекции, содержащее: систему поворотного энкодера, имеющую заданную угловую периодичность и кольцо энкодера, содержащее множество отражателей света, расположенных по окружности вокруг кольца энкодера в соответствии с заданной периодичностью, причем каждый отражатель света предназначен для полного внутреннего отражения падающего пучка света; узел датчиков, содержащую излучатель света, выполненный с возможностью излучения пучка света, направленного на отражатель света кольца энкодера, и два приемника света, выполненных с возможностью приема пучка света, отраженного отражателем света кольца энкодера, причем узел датчиков выполнен с возможностью обнаружения перемещения подвижного компонента программирования дозировки относительно узла датчиков во время дозирования лекарственного препарата; и процессорное устройство, выполненное с возможностью определения дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения.
Каждый отражатель света может содержать две отражающие поверхности, расположенные перпендикулярно друг другу, так что падающий пучок света отражается от одной отражающей поверхности на другую отражающую поверхность и отражается от другой отражающей поверхности на приемники света.
Отражатели света могут быть выполнены из прозрачного материала, и две отражающие поверхности каждого отражателя света зеркально отполированы с целью отражения света, падающего на отражатель света.
Либо система поворотного энкодера, либо узел датчиков может быть выполнен с возможностью вращения во время дозирования лекарственного препарата.
Краткое описание графических материалов
Чтобы общие концепции, изложенные в предыдущих разделах, можно было понять более полно, будут описаны варианты их осуществления со ссылкой на прилагаемые графические материалы, на которых:
на фиг. 1 показано устройство для инъекции согласно первому варианту осуществления;
на фиг. 2 показан проксимальный конец устройства для инъекции согласно второму варианту осуществления;
на фиг. 3A показан проксимальный конец устройства для инъекции, показанного на фиг. 2, после нажатия кнопки инъекции;
на фиг. 3B представлен вид в поперченном разрезе устройства для инъекции, показанного на фиг. 2, после нажатия кнопки инъекции;
на фиг. 4 представлен увеличенный вид в поперечном разрезе устройства для инъекции, показанного на фиг. 2;
на фиг. 5 представлен вид сверху и сбоку системы энкодера первого типа;
на фиг. 6 представлен вид сверху системы энкодера, показанной на фиг. 5;
на фиг. 7 представлена структурная схема контроллера устройства;
на фиг. 8A представлен вид в поперечном разрезе проксимального конца устройства до нажатия кнопки инъекции;
на фиг. 8B представлен вид в поперечном разрезе проксимального конца устройства во время частичного нажатия кнопки инъекции;
на фиг. 8C представлен вид в поперечном разрезе проксимального конца устройства во время полного нажатия кнопки инъекции;
на фиг. 9 представлен вид сверху и сбоку системы энкодера второго типа;
на фиг. 10 представлен вид сверху системы энкодера, показанной на фиг. 9;
на фиг. 11 изображен вывод кода Грея;
на фиг. 12 представлен частичный вид сверху системы энкодера;
на фиг. 13 представлен частичный вид сверху системы энкодера;
на фиг. 14 представлен вид сверху и сбоку системы энкодера третьего типа;
на фиг. 15A представлен частичный вид сверху системы энкодера;
на фиг. 15B представлен частичный вид сверху системы энкодера;
на фиг. 16 представлен вид сверху и сбоку системы энкодера четвертого типа;
на фиг. 17 представлен вид сверху и сбоку системы энкодера пятого типа;
на фиг. 18A представлен вид сверху системы энкодера шестого типа;
на фиг. 18B представлен вид сверху системы энкодера седьмого типа;
на фиг. 19A представлен снимок экрана, показывающий осциллограммы, полученные из различных вариантов осуществления;
на фиг. 19B представлен увеличенный вид снимка экрана, показанного на фиг. 19A;
на фиг. 20A показан первый способ изменения строба светодиода датчиков;
на фиг. 20B показан второй способ изменения строба светодиода датчиков;
на фиг. 20C показан третий способ изменения строба светодиода датчиков;
на фиг. 21 показан вид сверху и сбоку системы энкодера восьмого типа;
на фиг. 22 представлен вид сверху системы энкодера, показанной на фиг. 19;
на фиг. 23 представлена схема, демонстрирующая направление света с помощью оптического волновода узла датчиков, используемой в системе энкодера восьмого типа, показанной на фиг. 20 и 21;
на фиг. 24 показана схема, демонстрирующая направление света с помощью оптического волновода и коллимирующих линз узла датчиков, используемой в системе энкодера восьмого типа, показанной на фиг. 20 и 21;
на фиг. 25 представлен вид сверху и сбоку электронного подузла модуля, содержащего отдельный отлитый под давлением компонент со световодом;
на фиг. 26 показан вид сверху и сбоку отдельного отлитого под давлением компонента, содержащего коллимирующие линзы световода;
на фиг. 27 представлен вид сверху и сбоку другого электронного подузла модуля, содержащего цельнолитой узел коллимирующих линз световода с инструментом бокового действия для формирования дистальных поверхностей коллимирующих линз;
на фиг. 28 показан вид сверху и сбоку электронного подузла модуля, показанного на фиг. 27, показывающий сформированные дистальные поверхности коллимирующих линз;
на фиг. 29 показаны четыре схемы четырех альтернативных узлов коллимирующих линз для реализации световода для системы энкодера восьмого типа;
на фиг. 30 показан ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков во время перемещения подвижного компонента программирования дозировки относительно узла датчиков согласно варианту осуществления;
на фиг. 31 показаны ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков во время перемещения подвижного компонента программирования дозировки относительно узла датчиков, и установка «верхнего» и «нижнего» статического порогового напряжения для напряжений сигналов каждого оптического датчика узла датчиков согласно варианту осуществления первого алгоритма;
на фиг. 32 показаны ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков во время перемещения подвижного компонента программирования дозировки относительно узла датчиков, и установка «верхнего» и «нижнего» динамического порогового напряжения для напряжений сигналов каждого оптического датчика узла датчиков согласно варианту осуществления второго алгоритма;
на фиг. 33 показан ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков, которые обычно не совпадают с точки зрения среднего напряжения и амплитуды напряжения;
на фиг. 34 показаны ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков во время перемещения подвижного компонента программирования дозировки относительно узла датчиков, и обнаружение точки пересечения напряжений сигналов каждого оптического датчика узла датчиков согласно варианту осуществления третьего алгоритма;
на фиг. 35 показан ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков во время перемещения подвижного компонента программирования дозировки относительно узла датчиков, и обнаружение пика малой мощности напряжений сигналов каждого оптического датчика узла датчиков согласно варианту осуществления пятого алгоритма;
на фиг. 36 показан вид сверху и сбоку в частичном разрезе проксимального конца устройства для инъекции согласно третьему варианту осуществления; и
на фиг. 37 показан ход напряжений сигналов, генерируемых двумя оптическими датчиками узла датчиков во время перемещения подвижного компонента программирования дозировки относительно узла датчиков согласно третьему варианту осуществления устройства для инъекции.
Подробное описание
Далее варианты осуществления будут описаны со ссылкой на устройство для инъекции инсулина. Однако настоящее изобретение не ограничивается таким применением и может в той же степени использоваться с устройствами для инъекции, которые впрыскивают другие лекарственные препараты.
Варианты осуществления предоставлены в отношении устройств для инъекции, в частности устройств для инъекции с изменяемой дозой, которые регистрируют и/или отслеживают данные о дозах, доставляемых ими. Эти данные могут включать размер выбранной дозы, время и дату введения, продолжительность введения и тому подобное. Признаки, описанные в данном документе, включают расположение чувствительных элементов, методики управления энергопотреблением (для облегчения использования небольших батарей) и расположение пускового переключателя для обеспечения эффективного использования энергии.
Некоторые варианты осуществления в этом документе проиллюстрированы в отношении устройства для инъекции AllSTAR® от компании Sanofi, где кнопка инъекции и рукоятка совмещены. Механическая конструкция устройства для инъекции AllSTAR® подробно описана в международной заявке на патент WO2014/033195A1, которая включена в данный документ посредством ссылки. Известны другие устройства для инъекции с такими же кинематическими характеристиками дополнительного компонента набора и пусковой кнопки во время установки дозы и режима работы по вытеснению дозы как, например, устройство Kwikpen®, продаваемое компанией Eli Lilly, и устройство Novopen®, продаваемое компанией Novo Nordisk. Поэтому применение общих принципов к этим устройствам представляется простым, и дальнейшие пояснения будут опущены. Однако общие принципы настоящего изобретения не ограничены этим кинематическими характеристиками. Некоторые другие варианты осуществления могут быть предназначены для применения в устройстве для инъекции SoloSTAR® от компании Sanofi, где имеются отдельные компоненты кнопки инъекции и рукоятки.
В последующем описании термины «дистальный», «дистально» и «дистальный конец» относятся к концу устройства для инъекции, на котором предусмотрена игла. Термины «проксимальный», «проксимально» и «проксимальный конец» относятся к противоположному концу устройства для инъекции, на котором предусмотрена кнопка инъекции или ручка дозировки.
На фиг. 1 представлен покомпонентный вид устройства доставки лекарственного препарата. В этом примере устройство доставки лекарственного препарата представляет собой устройство 1 для инъекции, такое как шприц-ручка AllSTAR® от компании Sanofi.
Устройство 1 для инъекции, показанное на фиг. 1, является предварительно наполненной одноразовой шприц-ручкой, которая содержит корпус 10 и содержит контейнер 14 для инсулина, к которому может быть прикреплена игла 15. Игла защищена внутренним колпачком 16 иглы и либо внешним колпачком 17 иглы, либо другим колпачком 18. Доза инсулина, которая должна быть впрыснута из устройства 1 для инъекции, может быть запрограммирована или «набрана» путем поворота ручки 12 дозировки, и затем запрограммированная в данный момент доза отображается через окно 13 дозировки, например, в более единицах. Например, если устройство 1 для инъекции выполнено с возможностью введения человеческого инсулина, дозировка может отображаться в так называемых международных единицах (МЕ), где одна МЕ представляет собой биологический эквивалент приблизительно 45,5 микрограмма чистого кристаллического инсулина (1/22 мг). В устройствах для инъекции для доставки аналога инсулина или других лекарственных препаратов могут быть использованы другие единицы. Следует отметить, что выбранная доза может в равной степени отображаться иначе, чем показано в окне 13 дозировки на фиг. 1.
Окно 13 дозировки может иметь форму отверстия в корпусе 10, которое позволяет пользователю просматривать ограниченную часть цилиндра 70 набора, который выполнен с возможностью перемещения при повороте ручки 12 дозировки, чтобы обеспечить визуальную индикацию текущей запрограммированной дозы. Ручка 12 дозировки поворачивается по спиральной траектории относительно корпуса 10 при повороте во время программирования.
В этом примере ручка 12 дозировки содержит одно или более образований 71a, 71b, 71c для облегчения прикрепления устройства сбора данных.
Устройство 1 для инъекции может быть выполнено так, что при повороте ручки 12 дозировки слышен механический щелкающий звук для обеспечения пользователю звуковой обратной связи. Цилиндр 70 набора механически взаимодействует с поршнем в контейнере 14 для инсулина. В этом варианте осуществления ручка 12 дозировки также выполняет функцию кнопки инъекции. Когда иглу 15 вводят в участок кожи пациента, а затем нажимают ручку 12 дозировки в осевом направлении, доза инсулина, отображаемая в окне 13 для наблюдения, будет впрыснута из устройства 1 для инъекции. Если игла 15 устройства 1 для инъекции некоторое время остается в участке кожи после нажатия ручки 12 дозировки высокая процентная доля дозы фактически вводится в тело пациента. Впрыскивание дозы инсулина также может вызывать механический щелкающий звук, который, однако, отличается от звуков, производимых при вращении ручки 12 дозировки во время набора дозы.
В этом варианте осуществления во время доставки дозы инсулина ручка 12 дозировки возвращается в свое исходное положение в осевом направлении без вращения, в то время как цилиндр 70 набора поворачивается для возврата в свое исходное положение, например, для отображения дозы в ноль единиц.
Устройство 1 для инъекции может использоваться для более инъекционных процессов, пока либо контейнер 14 для инсулина не опустеет, либо не истечет срок годности лекарственного препарата в устройстве 1 для инъекции (например, через 28 дней после первого применения).
Кроме того, перед первым использованием устройства 1 для инъекции может возникнуть необходимость выполнить так называемый «первичный укол» для удаления воздуха из контейнера 14 для инсулина и иглы 15, например, выбрав две единицы инсулина и нажав ручку 12 дозировки, удерживая устройство 1 для инъекции иглой 15 вверх. Для простоты описания далее предполагается, что впрыснутые количества по существу соответствуют вводимым дозам, так что, например, количество лекарственного средства, впрыснутого из устройства 1 для инъекции, равно дозе, полученной пользователем. Тем не менее, должны быть приняты во внимание различия (например, потери) между впрыснутыми дозами и вводимыми дозами.
Как объяснено выше, ручка 12 дозировки также функционирует как кнопка инъекции, следовательно, один и тот же компонент используется для набора и выдачи.
На фиг. 2, 3A и 3B показан проксимальный конец устройства 2 согласно второму варианту осуществления. Устройство 2 содержит рукоятку 205 и кнопку 210 инъекции. В отличие от устройства 1, показанного на фиг. 1, кнопка 210 инъекции отделена от рукоятки 205, которая используется для набора дозировки. Цилиндр 70 набора и кнопка 210 инъекции расположены частично внутри рукоятки 205. Рукоятка 205 и цилиндр 70 набора функционально могут рассматриваться как элементы одного и того же компонента. Действительно, рукоятка 205 и цилиндр 70 набора могут быть отдельными компонентами только по причинам сборки. Помимо описанных в данном документе отличий, устройство 2, показанное на фиг. 2, работает по существу так же, как устройство 1, показанное на фиг. 1.
Подобно устройству 1, цилиндр 70 набора, рукоятка 205 и кнопка 210 инъекции проходят по спирали от устройства 2. В режиме работы по набору дозы (как показано на фиг. 2) нет относительного поворота между кнопкой 210 инъекции и цилиндром 70 набора. Доза набирается путем поворота рукоятки 205 (вследствие чего также поворачиваются цилиндр 70 набора и кнопка 210 инъекции) относительно остальной части устройства 2.
Чтобы начать выдачу лекарственного средства, кнопка 210 инъекции нажимается в осевом направлении, как показано на фиг. 3A и 3B. Это действие изменяет режим устройства 2 на режим выдачи. В режиме выдачи цилиндр 70 набора и компонент 205 рукоятки втягиваются по спиральной траектории в остальную часть устройства 2, тогда как кнопка 210 инъекции не вращается и только втягивается при осевом движении. Таким образом, в режиме выдачи происходит расцепление кнопки 210 инъекции, приводящее к относительному повороту кнопки 210 инъекции относительно цилиндра 70 набора. Это расцепление кнопки 210 инъекции относительно цилиндра 70 набора обусловлено устройством сцепления, описанным более подробно со ссылкой на фиг. 8A-C.
На фиг. 4 представлен увеличенный вид в поперечном разрезе проксимального конца устройства 2, показанного на фиг. 3, после нажатия кнопки 210 инъекции. Как показано на фиг. 4, кнопка 210 инъекции выполнена в виде двух отдельных подкомпонентов, а именно дистальной или нижней части 210a кнопки и проксимальной или верхней части 210b кнопки. Кнопка 210 инъекции может быть выполнена таким образом, чтобы облегчить процесс сборки. Дистальная часть 210a кнопки и проксимальная часть 210b кнопки могут быть скреплены вместе и функционировать как один компонент, т. е. кнопка 210 инъекции.
Узел 215 датчиков, содержащая один или более оптических датчиков, закреплена в кнопке 210 инъекции, которая выполнена с возможностью определения относительного положения поворота цилиндра 70 набора относительно кнопки 210 инъекции. Этот относительный поворот может быть приравнен к размеру выдаваемой дозы и использован для генерирования и хранения или отображения хронологической информации о дозах. Узел 215 датчиков может содержать первичный (оптический) датчик 215a и вторичный (оптический) датчик 215b. На фиг. 4 показан только вторичный датчик 215b.
На фиг. 5 и 6 показана система 500 энкодера согласно некоторым вариантам осуществления. Система энкодера выполнена с возможностью использования с устройством 2, описанным выше. Как показано на фиг. 5 и фиг. 6, первичный датчик 215a и вторичный датчик 215b выполнены с возможностью нацеливания на специально приспособленные области на проксимальном конце цилиндра 70 набора. В этом варианте осуществления первичный датчик 215a и вторичный датчик 215b представляют собой инфракрасные (IR) отражающие датчики. Поэтому специально приспособленные проксимальные области цилиндра 70 набора делятся на отражающую область 70a и неотражающую (или поглощающую) область 70b. Часть цилиндра 70 набора, содержащая отражающую область 70a и неотражающую (или поглощающую) область 70b, может быть названа кольцом энкодера.
Чтобы свести к минимуму производственные затраты, может быть предпочтительным формирование этих области 70a, 70b из отлитого под давлением полимера. В случае полимерных материалов поглощающую способность и отражательную способность можно контролировать с помощью добавок, например сажи для поглощающей способности и оксида титана для отражательной способности. Возможны альтернативные реализации, при которых поглощающие области представляют собой формованный полимерный материал, а отражающие области выполнены из металла (либо дополнительного металлического компонента, либо путем селективной металлизации сегментов полимерного цилиндра 70 набора).
Наличие двух датчиков облегчает методику управления энергопотреблением, описанную ниже. Первичный датчик 215a выполнен с возможностью нацеливания на ряд чередующихся отражающих областей 70a и неотражающих областей 70b на частоте, соразмерной с разрешающей способностью, необходимой для требований хронологии доз, применимых к конкретному лекарственному средству или режиму дозирования, например, 1 МЕ. Вторичный датчик 215b выполнен с возможностью нацеливания на ряд чередующихся отражающих областей 70a и неотражающих областей 70b с уменьшенной частотой по сравнению с основным датчиком 215a. Следует понимать, что система 500 энкодера может функционировать только с первичным датчиком 215a для измерения выдаваемой дозы. Вторичный датчик 215b облегчает методику управления энергопотреблением, описанную ниже.
Два набора кодированных областей 70a, 70b - одна внешняя, а другая внутренняя - показаны на фиг. 5 и 6 концентрически. Однако возможно любое подходящее расположение двух кодированных областей 70a, 70b. Хотя области 70a, 70b показаны как замкнутые области, следует иметь в виду, что возможны другие формы и конфигурации.
Устройства 1, 2 также содержат контроллер 700, как схематически показано на фиг. 7. Контроллер 700 содержит процессорное устройство 23, содержащее один или более процессоров, таких как микропроцессор, процессор цифровой обработки сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) или тому подобное, вместе с запоминающими блоками 24, 25, включая память 24 программ и основную память 25, которые могут хранить программное обеспечение для выполнения посредством процессорного устройства 23.
Контроллер 700 управляет узлом 215 датчиков, содержащим один или более датчиков 215a, 215b.
Предусмотрен выход 27, который может представлять собой интерфейс беспроводной связи для осуществления связи с другим устройством через беспроводную сеть, такую как Wi-Fi или Bluetooth®, или интерфейс для проводной линии связи, такой как разъем для вставки соединительного элемента универсальной последовательной шины (USB), mini-USB или micro-USB. Например, данные могут быть выведены на устройство сбора данных, подключенное к устройству 1, 2.
Также предусмотрен переключатель питания 28 вместе с батареей 29.
Управление энергопотреблением
Целесообразно иметь возможность минимизировать энергопотребление системы 500 энкодера, чтобы размер батареи 29, которой необходимо укомплектовать устройство 1, 2, можно было минимизировать. Датчики 215a, 215b, используемые в этом варианте осуществления, требуют определенной величины мощности для работы. Этот вариант осуществления выполнен таким образом, что датчики 215a, 215b могут периодически включаться и выключаться с регулируемой частотой (т.е. в режиме строб-дискретизации). По сути, существует ограничение максимальной скорости вращения, которая может быть подсчитана системой дискретного энкодера до того, как произойдет алиасинг. Алиасинг - это явление, при котором частота дискретизации меньше, чем частота, с которой воспринимаемые области проходят датчик, что означает, что при пропуске изменения области может произойти ошибочный подсчет. Вторичный датчик 215b с пониженной частотой по сравнению с первичной частотой 215a может допускать более высокую скорость вращения, прежде чем также произойдет алиасинг. Хотя вторичный датчик 215b не способен осуществлять разрешение дозы, выдаваемой с той же разрешающей способностью, что и первичный датчик 215a, выходной сигнал вторичного датчика 215b остается надежным на более высоких скоростях. Поэтому оба датчика 215a, 215b используются в комбинации, чтобы иметь возможность точно определять дозу, доставляемую до первой пороговой скорости вращения (выдачи). Датчики 215a, 215b могут затем использоваться для определения приблизительной дозы, доставляемой до второй (более высокой) пороговой скорости дозирования. На скоростях выше второй пороговой скорости датчики 215a, 215b не смогут точно или приблизительно определить доставляемую дозу, поэтому второй порог установлен выше скорости, которая физически невозможна в устройстве 1, 2 для инъекции.
Первый порог скорости определяется частотой дискретизации первичного датчика 215a и частотой переходов областей энкодера, которая фиксируется с разрешающей способностью, требуемой для предполагаемого лекарственного средства или режима дозирования (например, один переход на 1 МЕ). Второй порог скорости определяется частотой дискретизации вторичного датчика 215b и частотой переходов областей энкодера. Первый порог устанавливается таким образом, чтобы система могла охватывать самый большой диапазон скоростей дозирования для точного сообщения о выдаваемой дозе.
Иллюстративный вариант осуществления, показанный на фиг. 6, имеет первичный датчик 215a, нацеленный на переходы областей при 1 переходе на 1 МЕ доставляемой дозы, и вторичный датчик 215b, нацеленный на переходы областей при 1 переходе на 6 МЕ доставляемой дозы. Возможны другие варианты, которые включают 1 переход на 2 МЕ, 1 переход на 4 МЕ, 1 переход на 8 МЕ и 1 переход на единицы МЕ. Каждый из этих вариантов возможен, потому что в системе 500 энкодера, показанной на фиг. 6, имеются 24 отдельные области 70a, 70b на оборот. В целом, если бы количество отдельных областей 70a, 70b на оборот составляло n единиц, тогда были бы варианты с одним переходом областей на m единиц, где m - любой целочисленный делитель n, который больше 1 и меньше n.
Чем ниже частота дискретизации обоих датчиков 215a, 215b, тем ниже требуемая потребляемая мощность и, следовательно, меньше требуемый размер батареи 29. Таким образом, оптимальным является намеренное сведение к минимуму частоты дискретизации, насколько это практически возможно.
Расположение пускового переключателя
С целью дополнительного ограничения требования к емкости батареи целесообразно иметь устройство 2, находящееся в состоянии низкого энергопотребления, когда датчики 215a, 215b не требуют подачи питания. Это достигается с помощью переключателя, активируемого смещением кнопки 210 инъекции.
Как показано на фиг. 8A, переключатель 800 установлен в кнопке 210 инъекции. В конфигурации, показанной на фиг. 8A, рычажок переключателя 800 отклоняется с помощью цилиндра 70 набора, чтобы переключатель 800 находился в разомкнутом состоянии. В этой конфигурации муфта между компонентом сцепления и цилиндром 70 набора входит в зацепление с устройством 2 в режиме набора. При нажатии кнопки 210 инъекции кнопка 210 инъекции смещается в осевом направлении относительно цилиндра 70 набора, поэтому переключатель 800 смещается в осевом направлении относительно цилиндра 70 набора. Это смещение заставляет часть на цилиндре 70 набора скользить по поверхности кулачка на переключателе 800, позволяя рычажку переключателя отклоняться в его свободное состояние. Это отклонение рычажка переключателя влияет на изменение электрического состояния переключателя 800 (например, он электрически замыкается). Конструкция устроена таким образом, что электрическое изменение состояния переключателя 800 происходит до изменения состояния сцепления между компонентом сцепления и цилиндром 70 набора. На фиг. 8B показана точка перехода сцепления и показано, что переключатель 800 уже изменил состояние. На фиг. 8C показано состояние устройства 2 с полностью нажатой кнопкой 210 инъекции. В этом состоянии муфта полностью отделяется, что позволяет компоненту сцепления и цилиндру 70 набора вращаться относительно друг друга в режиме выдачи.
Эта последовательность работает в обратном порядке при отпускании кнопки 210 инъекции.
Изменение электрического состояния происходит при нажатии кнопки 210 инъекции, вследствие этого обеспечивается переход устройства 2 в состояние низкого потребления энергии, когда кнопка 210 инъекции не нажата. Относительный поворот между кнопкой 210 инъекции и цилиндром 70 набора невозможен, поэтому система 500 энкодера в этом состоянии не требуется.
Механическая конфигурация между цилиндром 70 набора и переключателем 800 может работать в противоположном смысле, так что рычажок переключателя 800 отклоняется во время выдачи, а не во время набора.
Следующие варианты осуществления относятся к альтернативной методике измерения для определения количества единиц лекарственного препарата, который был выдан из устройства 1, 2.
Как и в вариантах осуществления, описанных выше, два датчика 215 закреплены в кнопке 210 инъекции и выполнены с возможностью определения относительного положения поворота цилиндра 70 набора относительно кнопки 210 инъекции во время выдачи дозы. Этот относительный поворот может быть приравнен к размеру выдаваемой дозы и использован для генерирования и хранения или отображения хронологической информации о дозах.
Как показано на фиг. 9, два датчика 215 из этого варианта осуществления выполнены с возможностью нацеливания на специально приспособленные области 70a, 70b цилиндра 70 набора. В этом варианте осуществления используются инфракрасные отражающие датчики, поэтому области цилиндра 70 набора делятся на отражающие и поглощающие сегменты 70a, 70b. Сегменты 70a, 70b также могут упоминаться в данном документе как метки.
В отличие от системы 500 энкодера, описанной выше со ссылкой на фиг. 5 и 6, в системе 900 энкодера, показанной на фиг. 9 и 10, оба инфракрасных датчика 215 нацелены на области 70a, 70b одинакового типа. Другими словами, датчики 215 расположены таким образом, что они оба обращены к отражающим областям 70a или оба обращены к поглощающим областям 70b одновременно. Во время выдачи дозы цилиндр 70 набора поворачивается против часовой стрелки на 15° относительно кнопки 210 инъекции для каждой выдаваемой единицы лекарственного препарата. Чередующиеся элементы метки находятся в секциях по 30° (или две единицы). Датчики 215 расположены со сдвигом по фазе относительно друг друга таким образом, что угол между ними равен нечетному количеству единиц (например, 15°, 45°, 75° и т.д.), как показано на фиг. 10.
Система 900 энкодера, показанная на фиг. 10, имеет 12 единиц на оборот, т. е. 12 чередующихся областей 70a, 70b. В целом, варианты осуществления работают с любым количеством единиц на оборот, кратным 4. Угол α между датчиками 215 может быть выражен уравнением 1, где как m, так и n - любые целые числа, и на оборот приходится 4m единиц.
α = (2n - 1) 360
4m
Уравнение 1 - Угол между датчиками
На фиг. 11 показано, как выходные сигналы датчика A и датчика B изменяются при вращении цилиндра 70 набора против часовой стрелки во время выдачи лекарственного препарата.
Два датчика A, B в комбинации выдают 2-битный код Грея (11, 01, 00, 10). 2-битная кодовая последовательность повторяется каждые четыре выдаваемые единицы. Этот кодированный выходной сигнал облегчает обнаружение положительного (против часовой стрелки) и отрицательного (по часовой стрелке) вращения. Например, при считывании датчиками «11» изменение кода на «01» будет положительным вращением, а изменение кода на «10» будет отрицательным вращением. Эта чувствительная к направлению система имеет преимущества перед чисто инкрементальной системой в способности точно определять истинный объем выдаваемой дозы в тех случаях, когда может произойти отрицательное вращение. Например, в механизмах, которые излишне провернули в конце стопора дозы перед «прекращением оказания давления», когда пользователь отпускает кнопку 210 инъекции.
Как показано на фиг. 12, инфракрасные датчики 215 излучают инфракрасное излучение из светодиода. Отражающие инфракрасное излучение области 70a системы 900 энкодера отражают излучение, и датчики обнаруживают отраженное излучение. Датчики 215 затем преобразуют обнаруженное излучение в электрический выходной сигнал. Сила инфракрасного излучения, которое обнаруживается датчиком 215 после отражения от кольца энкодера, пропорциональна близости датчика к кольцу энкодера. Поэтому желательно, чтобы датчик 215 был как можно ближе к кольцу энкодера в радиальном направлении без соприкосновения с кольцом энкодера, что добавило бы потери на трение в механизм выдачи.
Как показано на фиг. 13, поглощающие инфракрасное излучение области 70b цилиндра 70 набора не полностью поглощают все инфракрасное излучение, излучаемое датчиком 215. Испытания показывают, что, когда датчик 215 выровнен с поглощающими областями 70b цилиндра 70 набора, датчики 215 имеют некоторую электрическую мощность из-за низкого уровня инфракрасного излучения, отражаемого цилиндром 70 набора. Следовательно, метки цилиндра набора предназначаются для максимизации расстояния между датчиком 215 и любыми отражающими частями кольца энкодера. Это обеспечивает высокий коэффициент контрастности и четкость сигнала.
После выдачи дозы программное обеспечение устройства 1, 2 контролирует электрический выходной сигнал датчиков 215. Программное обеспечение обнаруживает изменения между высокими и низкими выходными сигналами для определения достижения относительного поворота между цилиндром 70 набора и кнопкой 210 инъекции на дополнительные 15° (т.е. определения того, что была выдана дополнительная единица). Поэтому для функции устройства целесообразно, чтобы коэффициент контрастности между выходными сигналами высокого и низкого уровней был как можно большим.
Согласно различным вариантам осуществления конструкция цилиндра 70 набора и меток 70a, 70b кольца энкодера была разработана для увеличения коэффициента контрастности. В конструкции, показанной на фиг. 14, удалены поглощающие метки 70b цилиндра набора, чтобы оставить зазоры 140 между смежными метками 70a кольца энкодера. Это максимизирует расстояние между датчиком 215 и любым материалом, который может отражать любое инфракрасное излучение, излучаемое датчиком.
Такая конструкция увеличивает коэффициент контрастности между низкими и высокими электрическими выходными сигналами датчика. Однако, как показано на фиг. 15A, инфракрасное излучение, излучаемое датчиком 215, не является лучом, так что, когда цилиндр 70 набора вращается между отражающей меткой 70a кольца энкодера и зазором 140, происходит перекрытие, когда датчик 215 обнаруживает некоторое излучение, излучаемое датчиком 215. В течение этого периода выходной сигнал датчика постепенно снижается от высокого уровня к низкому, а не происходит мгновенное ступенчатое изменение между высоким и низким уровнями. Программному обеспечению более трудно определить это постепенное уменьшение как поворот на 15° (т.е. на одну выдаваемую единицу лекарственного средства), чем мгновенное ступенчатое изменение.
Это явление происходит с различными вариантами осуществления меток энкодера (как показано на фиг. 9 и фиг. 14). Однако, как показано на фиг. 15B, согласно некоторым вариантам осуществления поворот цилиндра 70 набора, который требуется до того, как выходной сигнал датчика полностью переключается на низкий выходной сигнал, увеличивается из-за видимости сторон отражающих меток 70a кольца энкодера.
Следовательно, целесообразно уменьшить толщину на краях отражающих инфракрасное излучение меток 70a на кольце энкодера. На фиг. 16 и фиг. 17 показаны два возможных варианта осуществления для уменьшения толщины на боковых краях отражающих инфракрасное излучение меток 70a на кольце энкодера, так что отражающие поверхности наклонены внутрь для предотвращения или уменьшения рассеянного отражения, вследствие чего улучшается контрастный переход и четкость сигнала.
На фиг. 16 показан вариант осуществления, в котором литое полимерное кольцо энкодера было заменено на штампованное металлическое кольцо 160.
На фиг. 17 показан вариант осуществления, в котором литое полимерное кольцо энкодера было заменено секциями цилиндра 70 набора, которые были напечатаны, окрашены или покрыты отражающим инфракрасное излучение материалом.
На фиг. 18A и 18B проиллюстрированы два альтернативных режима работы согласно различным вариантам осуществления. Как показано на фиг. 18A, датчик I и датчик II имеют угловое смещение (δ), равное половине периодичности (ϕ) кодированных областей кольца энкодера. В этом варианте осуществления датчики работают с синхронной дискретизацией, т. е. в одни и те же моменты времени (t1, t2, t3,…).
На фиг. 18A проиллюстрирован вариант осуществления, в котором угловое смещение (δ) отличается от половины периодичности элемента (ϕ/2), и датчики работают в поочередном режиме со смещением во времени (Δt) между дискретными отсчетами. Это может использоваться для достижения более сбалансированного общего энергопотребления светодиодов системы, чем то, которое доступно при синхронной работе.
В конфигурации, показанной на фиг. 18B, величина углового смещения (δ) может быть уменьшена до значения менее половины периодичности элемента (ϕ), с целью компенсации относительного углового перемещения при смещении во времени (Δt) между операциями дискретизации разных датчиков.
Смещение во времени (Δt) может регулироваться в соответствии с оценочным значением для относительной скорости вращения (ω) кольца энкодера, которое может быть вычислено по измерениям датчика. В частности, время смещения (Δt) может быть уменьшено, когда определено увеличение скорости вращения (ω).
На фиг. 19A показаны осциллограммы, полученные с помощью вариантов осуществления изобретения. Нижняя кривая представляет собой управляющий сигнал светодиода, а верхняя кривая представляет собой выходной сигнал токового зеркала перед триггером Шмитта.
На фиг. 19B представлено увеличенное изображение осциллограмм, показанных на фиг. 19A. Результаты показывают, что дискретизация возможна при 256 мкс с рабочим циклом приблизительно 12 к 1 (что означает, что средний ток составляет 1/12 от управляющего тока 4 мА светодиода, вследствие чего экономится энергия и емкость ячейки. Это эквивалентно частоте дискретизации более 3900 Гц и одной единице на сегмент и минимум двум дискретным отсчетам на сегмент, при этом скорость обнаружения, превышающая 1950 единиц в секунду, достигается без нарушения критерия Найквиста. Таким образом, не требуется детектор защиты от наложения спектров.
На фиг. 20 показан вариант осуществления способа изменения строба светодиода датчиков с обнаруженной в текущий момент угловой скоростью. Кривая в самом верху на фиг. 20 представляет строб светодиода, кривая в самом низу представляет ускорение датчиков. Средние кривые представляют сигналы, генерируемые датчиками.
Частота строба светодиода может поддерживаться на низком уровне, если на оптических датчиках нет изменений, и можно предположить, что привод находится в состоянии покоя (угловая скорость равна нулю).
При первом изменении состояния на датчике (угловая скорость увеличивается) частота сканирования может быть увеличена, чтобы обнаружить начальное вращение с достаточной точностью. Кроме того, частота может быть увеличена при увеличении угловой скорости согласно системе слежения, как показано на самой нижней кривой. В частности, это слежение может быть настроено таким образом, чтобы потеря в разрешающей способности светового барьера была в достаточной степени нейтрализована. Кроме того, разрешающая способность при определенной угловой скорости может быть, в частности, установлена настолько высокой, что даже при максимальном ускорении рассматриваемого привода возможна достаточно быстрая перенастройка частоты сканирования.
В связи с ускорением сигналы датчиков не совсем симметрично смещены на 90° (как показывают две средние кривые на фиг. 20). Как только датчик вращается с постоянной угловой скоростью, сигналы смещаются точно на 90°.
На фиг. 20 видно, как при увеличении угловой скорости освещенность, создаваемая стробом светодиода, получает все более высокую частоту сканирования, чтобы регулировать плотность или коэффициент заполнения стробирования во времени для обеспечения всегда достаточной разрешающей способности с учетом фактического состояния движения ротора.
Четыре оси времени, представленные на каждой из фиг. 20A/B/C, могут помочь проиллюстрировать некоторые иллюстративные варианты осуществления способа адаптивной регулировки частоты строба в соответствии с обнаруженной мгновенной угловой скоростью для достижения компромисса между энергосбережением и надежностью при обнаружении.
Здесь для упрощения следует предположить, что строб освещения энкодера является синхронным в том смысле, что предполагается, что оба детектора получают питание для создания световых вспышек по существу одинаковой длины по существу в одинаковые моменты времени. Эти стробирующие вспышки иллюстрируются белыми промежутками на самой верхней оси времени, обозначенной «Строб светодиода». Черные области между ними можно понимать как временные интервалы без какого-либо освещения на любом датчике. Несомненно, средняя мощность, необходимая для освещения датчика, соответствует количеству стробов за единицу времени из-за постоянной длительности строба. В примерной ситуации оси времени иллюстративного строба, показанной на фиг. 20A, увеличение временной плотности стробов слева направо, таким образом, приводит к пропорциональному увеличению потребляемой мощности для освещения. Однако это увеличение позволяет датчикам правильно определять рабочее состояние и скорость ротора энкодера во время фаз ускорения, как будет объяснено далее.
С целью облегчения понимания вращательной кинематики механизма, соединенного с ротором энкодера, мгновенная угловая скорость ротора энкодера представлена на самой нижней оси времени на каждой из фиг. 20A/B/C и обозначена как «Угловая скорость». Опять же, для упрощения во всех трех ситуациях была выбрана модель ускорения с кусочно-линейной характеристикой. В частности, предполагается, что после короткого начального времени покоя механизм испытывает линейное увеличение угловой скорости при постоянном ускорении и после более продолжительного интервала времени, обозначенного как «Ускорение», достигает максимума скорости вращения в конце рассматриваемого времени. Это можно понимать как приближение первого порядка к динамике механизма в предположении, что пользователь прикладывает постоянную силу для приведения в действие. Из-за линейного отклика механизма преобразования постоянная сила преобразуется в постоянный крутящий момент, который может служить для противодействия эффектам трения в базовой линии и для ускорения механизма. В дополнение к этому в качестве еще одного упрощения предполагается, что скорость вращения не будет превышать максимального значения, при котором общие потери на трение равны входному крутящему моменту. Это должно отражать характеристику жидкостного трения выталкиваемой жидкости, которая в первом приближении монотонно увеличивается со скоростью вытеснения. В упрощенной модели равновесие достигается на линейно нарастающем участке, как показано на самом нижнем графике, хотя более реалистичное моделирование может основываться на асимптотическом приближении к максимальной скорости вращения. Однако это не привело бы к качественному различию с точки зрения работы адаптивного стробирующего датчика, что будет объяснено в данном документе.
Несмотря на то, что работа датчика на основе стробирования может дать некоторые преимущества с точки зрения энергопотребления, он страдает некоторым систематическим недостатком, когда речь идет о более высокой скорости вращения или более высокой угловой скорости. Это легче понять, если взглянуть на вторую и третью оси времени, где проиллюстрирована диаграмма непрерывной интенсивности датчика напротив соответствующего оптического датчика. В данном документе под «диаграммой непрерывной интенсивности» следует понимать диаграмму интенсивности, которую соответствующий оптический детектор будет обнаруживать при полностью непрерывном освещении без каких-либо промежутков или перерывов во времени. Однако эффективное считывание показаний детектора является результатом применения операции «И» к значению на оси времени «Строб светодиода» и соответствующей «диаграмме непрерывной интенсивности» соответствующего датчика. По прямой наводящей информации можно сделать вывод, что в ситуации, когда стробирующие импульсы совпадают с более темными или более светлыми областями в «диаграмме непрерывной интенсивности» для соответствующего датчика в фиксированном отношении фаз, никаких изменений в показаниях датчика наблюдаться не будет, и сигналы могут быть ошибочно интерпретированы процессором в направлении стационарного углового положения ротора. Это может рассматриваться как наихудший сценарий, когда вообще никакая достоверная информация не может быть получена из сигналов датчика с учетом состояния вращения. Несомненно, существуют другие сценарии, в которых теряется только некоторая информация ввиду вращательных переходов в том или ином датчике. Это можно представить себе подобно муаровому эффекту, возникающему при наложении стробирующих импульсов и движущихся яркостных образов.
Помня об этом, оси времени на фиг. 20A/B/C могут предоставить пример того, как в целом более подходящая схема увеличения плотности стробирования во времени в ответ на изменение состояния вращения ротора может помочь избежать или по меньшей мере уменьшить неправильные показания датчика. С другой стороны, более внимательный взгляд на операцию «И» между первой осью времени и второй соответствующей третьей осью времени указывает на то, что ограниченное упреждающее увеличение плотности стробирования во времени может уже в достаточной степени решить проблему, когда можно предположить, что ускорение вращения механизмов остается ниже известного порогового значения, и/или когда можно предположить, что максимальное значение угловой скорости ротора остается ниже известного порогового значения. Как объяснено ранее, эти предположения будут выполнены в типичном сценарии использования шприц-ручки, при котором ускоряющий крутящий момент получается путем механического преобразования линейной силы, которую пользователь прикладывает к элементу приведения в действие, например дополнительному компоненту набора.
Ввиду этого довольно простая и легкая в реализации схема для адаптации плотности стробирования во времени может быть видна при цифровом переключении между первым, более низким значением плотности, и вторым, более высоким значением плотности. Их варианты проиллюстрированы на фиг. 20B/C. Оба предназначены для переключения из первого значения во второе значение, которое будет выполнено при обнаружении самого раннего перехода из стационарного в нестационарное состояние, и для переключения назад при обнаружении стационарного состояния в течение заданного периода времени. Очевидно, что определение того, достигнуто ли стационарное состояние или нестационарное состояние, должно быть выполнено на основе показаний датчика, и для избегания артефактов необходимо соблюдать определенную осторожность, как объяснено ранее.
Конкретные варианты этого общего подхода к переключению показаны на фиг. 20B и 20C соответственно. В частности, на фиг. 20B представлена иллюстративная ось времени для плотности «Строба светодиода», которая непосредственно после считывания перехода в любом из датчиков переключается на более высокое значение и поддерживается на этом значении до истечения заданного короткого интервала времени без дальнейшего обнаружения перехода в показаниях датчика. Несомненно, эта схема управления может привести к переключению между более низким и более высоким значением в фазах низкой угловой скорости ротора. На фиг. 20C, напротив, показан «Строб светодиода», который переключается на более высокое значение плотности после того, как значение угловой скорости, полученное из показаний датчика, превышает заданное пороговое значение. Эта схема была бы завершена переключением обратно на более низкое значение, когда одно и то же пороговое значение или даже более низкое значение не превышается расчетной скоростью.
Соответствующий выбор конкретных значений для более низкой плотности и более высокой плотности «Строба светодиода» может найти отправную точку в следующих соображениях. Предполагая, что ротор находится в стационарном состоянии, первое значение должно быть выбрано, чтобы обеспечить достаточную плотность с целью фиксации первого перехода в «диаграмме непрерывной интенсивности» на любом датчике и позволить переключение плотности стробирования на более высокое значение перед следующим проходом перехода перед любым датчиком. Здесь критическое значение можно увидеть в максимуме ускорения механизма. Согласование для более высокого ускорения требует большей плотности стробирующих импульсов в стационарном состоянии и, следовательно, требует увеличения первого, более низкого значения. Критическое условие для второго, более высокого значения, можно увидеть на максимальной скорости. Как объяснялось ранее, плотность стробирующих имульсов должна быть достаточной, чтобы не создавать какие-либо артефакты. Это очень простое цифровое переключение вверх/вниз уже может обеспечить значительное повышение коэффициента полезного действия для определенных случаев использования, в которых после активации работы датчика задержка во времени, прежде чем механизм переходит из стационарного состояния в нестационарное, не предсказуема, и/или время, пока механизм остается в стационарном состоянии, значительно больше времени, когда механизм находится в нестационарном состоянии. Например, непредсказуемость может быть следствием поведения пользователя. Если, в качестве более конкретного примера, общая работа датчиков запускается путем активизации при обнаружении события установки дозы или события снятия колпачка, то задержка во времени до начала последующей операции вытеснения может зависеть от времени, в течение которого соответствующий пользователь должен поместить иглу и начать операцию вытеснения.
Другие подходы для определения увеличения или уменьшения плотности стробирования во времени, чтобы приспособиться к изменению состояния вращения и/или скорости механизма, могут быть обнаружены на разных уровнях детального описания.
В дополнение к этому в ситуации с режимом поочередной дискретизации, когда стробирование на соответствующем датчике имеет сдвиг по фазе, как, например, объяснено со ссылкой на фиг. 18B, может быть включена адаптация сдвига по фазе между двумя датчиками. В такой мере цель может быть замечена при поддержании постоянного значения фазового сдвига в значении операции «И», как упомянуто выше, между датчиками с угловым смещением, например 90°, независимо от мгновенной угловой скорости. Ситуация с 90° приведет к общему поведению детектора, идентичному тому, которое имеют датчики со смещением точно на 90° и синхронной дискретизацией, но при этом нет необходимости включать все источники излучения одновременно.
Дополнительные варианты описанного варианта осуществления могут включать подходы для ограничения необходимости питания стробирования светодиода только одним из двух или более датчиков. Несомненно, в любой момент на оси времени, показанной на фиг. 20A/B/C, по двум доступным показаниям датчиков можно определить, появится ли следующий переход либо в «Датчике I», либо в «Датчике II» вследствие фиксированной пространственной взаимосвязи датчиков. В частности, для всех точек на оси времени с одинаковыми показаниями датчика, а именно «темный»/«темный» и «светлый»/«светлый», последующий переход появится на оси времени «Датчика II». То же самое верно для всех моментов времени, когда на оси времени «Датчика I» будет считываться «темный», а на оси времени «Датчика II» будет считываться «светлый». Только для моментов времени, когда «светлый» будет считываться с «Датчика I», тогда как «темный» будет считываться с «Датчика II», можно предсказать, что следующий переход появится на оси времени «Датчика I». Благодаря применению этой схемы энергопотребление для строба датчиков может быть дополнительно уменьшено по меньшей мере в стационарном состоянии механизма.
Теперь будет описана система энкодера в соответствии с дополнительными вариантами осуществления со ссылкой на фиг. 21-29. Эта система энкодера может использоваться для регистрации доз, доставляемых из устройства для инъекции. Концепция этой системы энкодера основана на направлении света, используемом для передачи статуса метки-индикатора на отражающий датчик, который физически удален от метки. Варианты осуществления, показанные на фиг. 20-28, проиллюстрированы с помощью оптического дополнительного модуля для устройства для инъекции, где метка-индикатор формируется за счет относительного поворота цилиндра с числами или цилиндра набора и кнопки инъекции, последняя из которых вмещает оптический датчик. Такой дополнительный модуль может быть выполнен с возможностью добавления в соответствующим образом сконфигурированное устройство для инъекции в форме ручки с целью регистрации доз, которые набираются и доставляются из устройства. Эта функциональная возможность может быть полезна широкому кругу пользователей устройства в качестве памятки или для поддержки подробного ведения журнала хронологии доз. Модуль может быть выполнен с возможностью подключения к мобильному устройству, такому как смартфон или планшетный персональный компьютер (PC) или тому подобное, чтобы обеспечить возможность периодической загрузки хронологии доз из модуля. Однако концепция системы энкодера также применима к любому устройству с разделением метки-индикатора и датчика, например к устройству 1 для инъекции, показанному на фиг. 1, в котором модуль может быть встроен в ручку 12 дозировки.
В соответствии с концепцией системы энкодера коллимирующая оптическая система расположена между активной поверхностью по меньшей мере одного оптического датчика, который может представлять собой инфракрасный отражающий датчик, и подвижным компонентом программирования дозировки. Коллимирующая оптическая система может содержать одну или более дискретных коллимирующих линз и один или более оптических волноводов. Геометрическая форма линзы может быть выбрана так, чтобы делать параллельным («коллимировать») расходящееся излучение, испускаемое по меньшей мере одним оптическим датчиком, перед передачей через оптический волновод между по меньшей мере одним датчиком и целью, а именно меткой-индикатором.
На фиг. 21 показаны основные части варианта осуществления модуля 1000, реализующего эту концепцию энкодера: метка-индикатор 1008 может быть сформирована путем относительного поворота цилиндра 1006 с числами вокруг оси 1010 вращения, причем метка-индикатор 1008 реализована в показанном варианте осуществления посредством радиально выступающих зубцов, образованных в верхней части, например, цилиндра с числами или цилиндра 70 набора устройства 1 для инъекции; оптический датчик 215c и коллимирующая оптическая система, содержащая две коллимирующие линзы 1004a, 1004b и световод в виде оптического волновода 1002 для передачи состояния метки-индикатора 1008 на датчик 215c, который расположен удаленно от метки. Коллимирующие оптические системы 1002, 1004a, 1004b и оптический датчик 215c могут быть расположены относительно окружающих компонентов внутри устройства для инъекции и, в частности, связаны с дополнительным модулем. Как можно видеть, коллимирующая оптическая система, содержащая линзы 1004a, 1004 и оптический волновод 1002, расположена между активной стороной, т.е. излучающей и принимающей инфракрасное излучение стороной оптического датчика 215c, и меткой-индикатором 1008, образованной цилиндром 1006 с числами.
На фиг. 22 показана основа 1012, которая вмещает два оптических датчика 215c (представленные их местоположениями на основе 1012, показанные прямоугольниками с жирными линиями), и их соответствующие коллимирующие линзы 1004a, 1004b согласно варианту осуществления модуля 1000. Предполагается, что коллимирующие линзы 1004a, 1004b, реализованные в данном документе с помощью дискретных линз, удерживаются относительно оптических датчиков 2015c и проксимальной поверхности оптических волноводов посредством шины или другой геометрии размещения, существующей в качестве элемента внутри основы 1012.
На фиг. 23 показан оптический волновод 1002 и направление излучения (представленное пунктирными стрелками) внутри оптического волновода 1002. Датчик 215c расположен перед дистальным концом оптического волновода 1002, а целевая поверхность, т.е. метка-индикатор 1008, перед проксимальным концом волновода. Диаметр оптического волновода уменьшается от дистального к проксимальному концу таким образом, что оптический волновод 1002 имеет форму усеченного конуса. В частности, оптический волновод 1002 может иметь круглое или эллиптическое поперечное сечение. Оптический волновод 1002 помогает лучше направлять излучение, излучаемое датчиком 215c, на удаленную целевую поверхность или метку-индикатор 1008 соответственно, и излучение, отраженное от метки-индикатора 1008, обратно в принимающую часть датчика 215c. Таким образом, сигнал, принимаемый датчиком, наблюдающим отражающую поверхность (цилиндр с числами), через оптический волновод, может быть улучшен, что приводит к лучшему качеству сигнала благодаря улучшению отклика оптического датчика в результате большего падающего потока на приемник оптического датчика, особенно во время нормальной работы, так как это может увеличить выходное напряжение оптического датчика, а более высокое выходное напряжение может быть легче обнаружено.
На фиг. 24 (b) показано влияние дискретных коллимирующих линз 1004a и 1004b, расположенных между дистальным концом оптического волновода 1002 и датчиком 215c. Расходящееся излучение, испускаемое активной частью датчика 215c, коллимируется с помощью коллимирующей линзы 1004a перед передачей через оптический волновод 1002 на метку-индикатор 1008, представляющую целевую поверхность. Излучение, отраженное меткой-индикатором 1008 обратно в оптический волновод 1002, направляется на коллимирующую линзу 1004b, которая коллимирует принятое излучение до того, как оно будет принято принимающей частью датчика 215c. Коллимирующая линза 1004a, в частности, служит для коллимации излучения источника расходящегося света, такого как светодиод (светоизлучающий диод) датчика 215c, как показано на левом изображении (а) на фиг. 24. Предполагается, что коллимирующие линзы 1004a, 1004b могут быть выполнены из оптически прозрачного материала, такого как стекло или поликарбонат, в частности с хорошей проницаемостью для инфракрасного излучения в диапазоне длин волн оптического датчика 215c. Чтобы свести к минимуму любое воздействие на увеличенную длину модуля, содержащего коллимирующую оптическую систему и датчик, предполагается, что коллимирующие линзы коллимирующей оптической системы должны принимать форму линз с асферическими поверхностями или поверхностями постоянной кривизны, которые позволяют достичь коллимирующего эффекта в оптике с меньшим форм-фактором, как показано на примере линзы на изображении (а) на фиг. 24. В частности, обнаружение бинарного состояния цели цилиндра с числами во время «переключения режима», т.е. когда кнопка дозирования или инъекции устройства для инъекции нажимается из ее ненапряженного состояния в положение 0U, может быть улучшено с помощью коллимирующих линз. В этом случае различие между двоичными «0» и «1», обнаруженными оптическим датчиком, может быть легко получено для большого, например ~0,5 миллиметра, расстояния между дистальными концами оптических волноводов и цилиндром с числами с компонентами, подвергающимися относительному вращению. Включение коллимирующих линз может уменьшить расходящийся эффект вышеупомянутого зазора, облегчая устранение неоднозначности между «0» и «1», как сообщается оптическим датчиком. Другим преимуществом использования коллимирующих линз является возможное уменьшение «перекрестных помех» (рассеяния светового потока) между смежными датчиками, когда выходы таких датчиков совместно используют одну и ту же оптически смежную основу оптического волновода.
Все вышеперечисленные пункты относятся, в основном, к более надежной кодирующей механической системе, в которой оптический (отражающий) датчик образует активный элемент в оптическом энкодере. Если движение цилиндра с числами относительно кнопки дозирования фиксируется более эффективно, можно использовать уменьшенную мощность излучателя оптического датчика и алгоритмы, требующие меньшего количества операций микроконтроллера, что снижает энергопотребление и увеличивает срок службы батареи. Система энкодера, описанная выше и далее со ссылкой на фиг. 20-28, в равной степени применима для включения в одноразовое или многоразовое устройство для инъекции или любое устройство, содержащее устройство оптического энкодера с подобной архитектурой оптического волновода.
Коллимирующая оптическая система может быть реализована в виде отдельных дискретных компонентов, отличных от отлитой под давлением основы оптического волновода. На фиг. 25 показан дополнительный вариант осуществления основы 1012, содержащей отдельный отлитый под давлением компонент 1014, закрепленный на основе 1012, которая предусмотрена в качестве держателя для всех элементов коллимирующей оптической системы, а именно коллимирующих линз 1004a, 1004b и оптических волноводов 1002. Компонент 1014, к которому прикреплены коллимирующие линзы 1004a, 1004b и который отделен от основы 1012, показан на фиг. 26.
Альтернативно геометрическая форма коллимирующих линз также может быть сформирована непосредственно с помощью части инструмента 1016, предусмотренного для создания шасси 1012 оптического волновода, как показано в варианте осуществления на фиг. 27. В этом случае нижняя часть геометрической формы линзы может быть ограничена полусферами вследствие действия инструмента, в то время как проксимальные поверхности могут быть сформированы как полные сферы (асферы). На фиг. 28 показана цельнолитая основа 1012, содержащая также оптические волноводы 1002.
В описанных выше вариантах осуществления используются две дискретные коллимирующие линзы 1004a, 1004b, которые по отдельности покрывают передающую и принимающую части оптического датчика, в частности оптический инфракрасный отражающий датчик. Однако также возможны и другие варианты осуществления, как будет описано со ссылкой на фиг. 29 ниже: например, на изображении (а) показан вариант осуществления с установленной на печатной плате (PCB) микроформованной линзовой решеткой 1004a, покрывающей датчик 215c; другой пример показан на изображении (b), где представлена одна коллимирующая линза 1004a, которая покрывает передающую и принимающую части оптического датчика 215c; дополнительные варианты осуществления с одной коллимирующей линзой показаны на изображениях (с) и (d): в варианте осуществления на изображении (с) используется одна коллимирующая линза 1004b, покрывающая принимающую часть оптического датчика 215c, и в варианте осуществления на изображении (d) используется одна коллимирующая линза 1004a, расположенная на дистальном конце оптического волновода 1002.
Далее описаны варианты осуществления алгоритмов для обработки сигналов, в частности напряжений сигналов, генерируемых оптическими датчиками узлов датчиков, как описано выше в отношении устройства для инъекции и модуля. Алгоритмы реализованы в виде компьютерных программ для выполнения одним или более процессорами, например процессорным устройством 23, содержащимся в контроллере 700, как показано на фиг. 7.
Алгоритмы реализованы для обработки сигналов, доставляемых одним или более оптическими датчиками 215a, 215b, 215c, а именно для декодирования выбранных для доставки или доставляемых устройством для инъекции. Алгоритмы, в частности, применимы к модулю, описанному выше со ссылкой на фиг. 20-28, но также применимы к устройству для инъекции, описанному выше со ссылкой на фиг. 1-19B. Алгоритмы предпочтительно применимы к устройствам с разделением метки-индикатора и датчика с помощью оптических волноводов, таким как модуль, описанный выше.
Относительный поворот между кнопкой дозирования и цилиндром с числами может быть оптически закодирован с использованием инкрементального энкодера, например квадратурного энкодера, с двумя или более оптическими датчиками, в частности отражающими инфракрасными датчиками, которые смотрят в осевом направлении на зубцы или радиально выступающие зубья, сформированные на верхней поверхности цилиндра с числами. Система энкодера может быть реализована в виде дополнительного модуля, как описано выше со ссылкой на фиг. 20-28, что означает, что положение обнаруживаемых зубцов или зубьев может изменяться относительно положений оптических датчиков от устройства к устройству. В дополнение к этому при нажатии и отпускании кнопки дозирования осевое положение оптических датчиков также может изменяться относительно зубцов.
Алгоритмы, описанные ниже, могут быть реализованы в устройстве для инъекции или дополнительном модуле, в частности, с целью регистрации доз, доставляемых из устройства для инъекции. Эта функциональная возможность может быть полезна широкому кругу пользователей устройств для инъекции в качестве памятки или для поддержки подробного ведения журнала хронологии доз. Предполагается, что электронные схемы, реализующие алгоритмы, могут быть выполнены с возможностью подключения к мобильному устройству, такому как смартфон или подобное, для обеспечения возможности периодической загрузки хронологии доз из электронных схем.
Алгоритмы выполнены с возможностью обнаружения относительного вращения зубцов или зубьев на цилиндре с числами относительно невращающегося компонента, такого как кнопка дозирования. Наличие или отсутствие элемента в виде зубца или зуба обеспечивает двоичный код, который может использоваться для подсчета количества единиц, выдаваемых из устройства для инъекции. Выходное напряжение оптических датчиков обычно может быть приближено к синусоиде. Алгоритмы способны обнаруживать наличие или отсутствие элемента в виде зубца или зуба на всех устройствах, которые могут иметь любую комбинацию геометрических допусков на физические признаки.
В дополнение к этому, когда кнопка дозирования перемещается в осевом направлении в направлении к или от элементов в виде зубца или зуба в начале и в конце впрыскивания дозы, изменение сигнала, генерируемого оптическим датчиком, не следует неправильно интерпретировать как поворот элементов в виде зубца или зуба. Следовательно, алгоритмы могут учитывать значительную амплитудную модуляцию сигнала, генерируемого оптическим датчиком.
На фиг. 30 показан типичный ход напряжений сигналов, генерируемых двумя оптическими датчиками, которые могут иметь различные профили усиления друг для друга. Напряжения сигналов модулированы по амплитуде. Разные профили усиления могут привести к тому, что два оптических датчика будут генерировать существенно разные напряжения сигналов и отправлять их в процессор для обработки напряжений сигналов. Разные профили усиления могут быть, например, из-за допусков, связанных с электронными компонентами.
Все алгоритмы относятся к системе с двумя оптическими датчиками, расположенными с фазовым сдвигом на 180°, чтобы напряжения сигналов, генерируемых обоими датчиками, были противофазными.
В первом варианте осуществления алгоритма применяется статическое определение порогов: алгоритм устанавливает верхний порог и нижний порог для напряжения сигнала первого датчика и напряжения сигнала второго датчика соответственно; затем подсчитывается единица дозы, выбранная с помощью подвижного компонента программирования дозировки, если напряжение сигнала второго датчика пересекает верхний порог и после этого пересекает нижний порог, после чего напряжение сигнала первого датчика пересекает нижний порог и затем пересекает верхний порог. Во время изготовления может быть обеспечено прохождение набора калибровочной геометрии под каждым датчиком на контролируемых расстояниях для определения верхнего и нижнего порогов. Пороги устанавливаются на весь срок службы таким образом, чтобы верхний порог всегда был ниже наибольшего напряжения сигнала, наблюдаемого во время калибровки (обычно на минимальном расстоянии от подложки до датчика), а нижний порог всегда был ниже наименьшего напряжения сигнала, наблюдаемого во время калибровки (обычно на максимальном расстоянии от подложки к датчику). Установленные пороги для напряжения сигнала первого датчика и второго датчика показаны на фиг. 31, на которой представлен ход напряжений сигналов первого и второго датчика. Подсчет единиц представлен стрелками.
Во втором варианте осуществления алгоритма применяется динамическое определение порогов: также этот алгоритм устанавливает верхний порог и нижний порог для напряжения сигнала первого датчика и напряжения сигнала второго датчика соответственно; затем подсчитывается единица дозы, выбранная с помощью подвижного компонента программирования дозировки, если напряжение сигнала второго датчика пересекает верхний порог и после этого пересекает нижний порог, после чего напряжение сигнала первого датчика пересекает нижний порог и затем пересекает верхний порог. С помощью этого алгоритма пороги могут быть определены в течение первых более единиц, доставляемых из каждой дозы. При доставке дозы частота дискретизации для дискретизации напряжений сигналов обоих датчиков устанавливается на уровень выше, чем частота дискретизации, используемая для нормальной работы, и напряжения сигналов дискретизируются с более высокой частотой дискретизации во время доставки дозы. Затем определяются величины по меньшей мере двух последовательных максимального и минимального значений напряжений сигналов каждого датчика с помощью алгоритма обнаружения пиковых значений. Если определенные величины по меньшей мере двух последовательных максимального и минимального значений находятся в пределах заданного диапазона допустимых значений сигнала, например в пределах установленных на заводе допустимых отклонений напряжения, тогда верхний порог и нижний порог для каждого напряжения сигнала определяются на основе процентной доли от измеренных максимального и минимального значений напряжения сигнала или определенных величин по меньшей мере двух последовательных максимального и минимального значений. Это динамическое определение порогов выполняется для обоих датчиков. После установки порогов частота дискретизации снижается до более низкого уровня, обычно используемого для нормальной работы, поскольку обнаружение пиковых значений больше не требуется. Это снижает энергопотребление алгоритма. На фиг. 32 продемонстрировано динамическое определение порогов посредством хода напряжений сигналов первого и второго датчика.
В третьем варианте осуществления алгоритма не полагаются на установку порогов для обнаружения переходов между низкими и высокими значениями, а подсчитывают единицу в момент, когда напряжение от второго датчика становится больше, чем напряжение от первого датчика на определенную величину, то есть в момент пересечения двух сигналов напряжения датчиков. Единица подсчитывается после того, как сигналы двух оптических датчиков пересекаются в одном направлении, и последующие единицы не могут быть подсчитаны, пока сигналы не пересекутся хотя бы один раз в противоположном направлении. Это эффективно создает систему триггера-защелки. Сигналы не могут считаться «пересекающимися» до тех пор, пока разница между сигналами, в частности разница напряжений между ними, не превысит пороговое значение, которое может быть установлено во время изготовления. Для применения этого алгоритма сигналы от двух датчиков должны соответствовать среднему напряжению и средней амплитуде. Поскольку сигналы от двух датчиков обычно не совпадают по среднему напряжению и амплитуде напряжения, как показано ходом сигналов двух датчиков на фиг. 33, они должны быть согласованы путем масштабирования. Таким образом, во время изготовления обеспечивается прохождение набора калибровочной геометрии под каждым датчиком на контролируемом расстоянии, и ко второму датчику применяются коэффициенты масштабирования для среднего значения и амплитуды для согласования среднего значения и амплитуды его сигнала со средним значением и амплитудой сигнала первого датчика. После того как сигналы промасштабированы, триггерный алгоритм подсчета дозы может быть использован для подсчета доз, как показано на фиг. 34.
Четвертый вариант осуществления алгоритма по существу идентичен третьему варианту осуществления, за исключением того, что коэффициенты масштабирования, определенные для получения общего среднего значения и амплитуды для двух сигналов датчиков, могут быть рассчитаны после каждой дозы, что устраняет необходимость «заводской установки» этих параметров во время изготовления. С целью достижения этого весь набор данных для сигналов обоих датчиков сохраняется, например буферизируется в запоминающем устройстве, и из сохраненного набора данных ретроспективно вычисляются коэффициенты масштабирования для получения общего среднего значения и амплитуды между сигналами обоих датчиков. После применения масштабных коэффициентов этот алгоритм используется, как и прежде таким образом, что единица подсчитывается после пресечения сигналов в одном направлении, и последующие единицы не могут быть подсчитаны, пока сигналы не пересекутся по меньшей мере один раз в противоположном направлении.
В пятом варианте осуществления алгоритма не полагаются на установку порогов для обнаружения переходов между низкими и высокими значениями или масштабирование сигналов для согласования среднего значения и амплитуды, а используют способ обнаружения пиковых значений низкой мощности. Высокая частота дискретизации не требуется, поскольку не требуется точное значение пикового напряжения, а требуется только обнаружение существования пикового значения, то есть точки перегиба на сигнале напряжения датчика. Система триггера-защелки может использоваться, как и в других алгоритмах, описанных в данном документе, в которых единица подсчитывается, когда пиковое значение регистрируется в сигнале первого датчика из двух датчиков, но последующие единицы не могут быть подсчитаны до тех пор, пока не будет наблюдаться хотя бы одно пиковое значение в сигнале второго датчика. Это проиллюстрировано на фиг. 35. Этот алгоритм не требует масштабирования или заводской установки порогов, что делает его устойчивым к изменениям допусков и амплитуды при использовании. Ожидается также, что он будет иметь низкое энергопотребление из-за низкой вычислительной сложности и возможности низкой частоты дискретизации по сравнению с альтернативными алгоритмами.
Вышеописанные алгоритмы могут допускать низкие частоты дискретизации и минимальную вычислительную сложность, в то же время приспосабливаясь к изменениям допусков от устройства к устройству и изменениям амплитуды используемого сигнала, обусловленным изменяющимся осевым положением датчика относительно вращающегося цилиндра с числами, в частности зубьев или зубцов цилиндра.
Еще один вариант осуществления устройства для инъекции, содержащего систему 1100 поворотного энкодера с заданной угловой периодичностью и кольцо или колесо 1102 энкодера, показан на фиг. 36. Этот вариант осуществления можно использовать в качестве счетчика вращений, в частности, для выбора дозы с помощью шприц-ручки. Кольцо 1102 энкодера может быть расположено внутри кнопки 1104 инъекции устройства для инъекции.
Кольцо 1102 энкодера содержит множество отражателей света, расположенных по окружности вокруг кольца 1102 энкодера с заданной периодичностью. Отражатели света расположены на осевой лицевой стороне кольца энкодера, чтобы свет, направленный к отражателям света в осевом направлении системы 1100 поворотного энкодера, мог быть принят и отражен. Каждый отражатель света содержит две отражающие поверхности 1106, расположенные перпендикулярно друг другу. Таким образом, падающий свет 1108 может отражаться от одной отражающей поверхности на другую отражающую поверхность и от другой отражающей поверхности обратно к источнику падающего света посредством полного внутреннего отражения (TIR), как показано на правом изображении на фиг. 36.
По меньшей мере часть кольца 1102 энкодера может быть выполнена из прозрачного материала, и отражающие поверхности 1106 могут быть зеркально отполированы с целью отражения определенного количества падающего света обратно, которое может генерировать амплитуду сигнала, подходящую для дальнейшей обработки.
Светодиод 1112 может использоваться в качестве источника света и два фотодиода 1114 - для обнаружения отраженного света. Светодиод 1112 и фотодиоды 1114 могут быть расположены на печатной плате 1116 электронного модуля для устройства для инъекции, который также может содержать электронную схему для управления излучением света светодиодом 1112 и обрабатывать выходные сигналы фотодиодов 1114 для обнаружения поворота либо PCB 1116, либо кольца 1102 энкодера.
Для печатной платы 1116 может быть предусмотрен корпус 1118, например, когда электронные схемы состоят из дополнительного устройства для шприц-ручки. С целью обеспечения прохождения света через корпус 1118 он может содержать встроенную линзу 1120 для прохождения света, излучаемого светодиодом 1112, и линзы 1122, расположенные перед фотодиодами 1114, для пропускания отраженного света на фотодиоды 1114. Линза 1120 может быть приспособлена для фокусировки световых лучей, излучаемых светодиодом 1112, на отражающие поверхности 1106 отражателей света, и линзы 1122 могут быть приспособлены для фокусировки света, отраженного от поверхностей 1106, на светочувствительные области фотодиодов 1114.
Кнопка 1104 может содержать окно 1124, выполненное из светопрозрачного материала, и отверстия 1126 для света, излучаемого светодиодом 1112 и отражаемого обратно от поверхности 1106 на фотодиоды 1114. Путь излучения и возврата света разделяется посредством TIR отражающих поверхностей 1106 на отверстиях 1126, которые расположены рядом друг с другом.
Моделирование описанной выше концепции энкодера показало хорошую производительность оптической системы с относительно высокой пиковой энергетической освещенностью, как показано на фиг. 37, на которой представлена мощность двух типичных выходных сигналов фотодиодов 1114. Кроме того, моделирование показало относительно высокое отношение сигнал/шум и, таким образом, продемонстрировало устойчивость характеристик.
Хотя вышеуказанные варианты осуществления были описаны в отношении сбора данных из шприц-ручки для инсулина, следует отметить, что варианты осуществления изобретения могут использоваться для других целей, таких как мониторинг инъекций других лекарственных препаратов.
Термины «лекарственное средство» или «лекарственный препарат» синонимично используются в настоящем документе и обозначают фармацевтический состав, содержащий один или более активных фармацевтических ингредиентов или их фармацевтически приемлемых солей или сольватов и необязательно фармацевтически приемлемый носитель. Активный фармацевтический ингредиент («API»), в самом широком смысле, представляет собой химическую структуру, имеющую биологическое воздействие на людей или животных. В фармакологии лекарственное средство или лекарственный препарат используют в лечении, уходе, профилактике или диагностировании заболеваний, или используют для иного улучшения физического или психологического благополучия. Лекарственное средство или лекарственный препарат можно использовать в течение ограниченного срока или на регулярной основе для хронических нарушений.
Как описано ниже, лекарственное средство или лекарственный препарат могут включать по меньшей мере один API, или их комбинации, в различных типах составов для лечения одного или более заболеваний. Примеры API могут включать малые молекулы с молекулярной массой 500 Да или менее; полипептиды, пептиды и белки (например, гормоны, факторы роста, антитела, фрагменты антител и энзимы); углеводы и полисахариды; и нуклеиновые кислоты, двуцепочечные или одноцепочечные ДНК (включая «оголенные» и кДНК), РНК, антисмысловые нуклеиновые кислоты, такие как антисмысловые ДНК и РНК, малые интерферирующие РНК (миРНК), рибозимы, гены и олигонуклеотиды. Нуклеиновые кислоты могут быть включены в молекулярные системы доставки, такие как векторы, плазмиды или липосомы. Также рассматриваются смеси одного или более лекарственных средств.
Лекарственное средство или лекарственный препарат могут содержаться в первичной упаковке или «контейнере для лекарственного средства», приспособленных для использования с устройством доставки лекарственного средства. Контейнер для лекарственного средства может представлять собой, например, картридж, шприц, резервуар или другой твердый или гибкий сосуд, выполненный с возможностью обеспечения надлежащей камеры для хранения (например, кратко- или долговременного хранения) одного или более лекарственных средств. Например, в некоторых случаях камера может быть предназначена для хранения лекарственного средства в течение по меньшей мере одного дня (например, от 1 до по меньше мере 30 дней). В некоторых случаях камера может быть предназначена для хранения лекарственного средства в течение от приблизительно 1 месяца до приблизительно 2 лет. Хранение может происходить при комнатной температуре (например, приблизительно 20°C) или при температурах охлаждения (например, от приблизительно -4°C до приблизительно 4°C). В некоторых случаях контейнер для лекарственного средства может представлять собой или может включать двухкамерный картридж, выполненный с возможностью отдельного хранения, по одному в каждой камере, двух или более компонентов фармацевтического состава, подлежащего введению (например, API и разбавителя, или двух разных лекарственных средств). В таких случаях две камеры двухкамерного картриджа могут быть выполнены с возможностью обеспечения смешивания двух или более компонентов до и/или во время дозированного введения в тело человека или животного. Например, две камеры могут быть выполнены таким образом, что они сообщаются по текучей среде друг с другом (например, посредством трубопровода между двумя камерами) и позволяют смешивать два компонента по желанию пользователя перед дозированием. Альтернативно или дополнительно две камеры могут быть выполнены с возможностью смешивания во время выдачи компонентов в тело человека или животного.
Лекарственные средства или лекарственные препараты, содержащиеся в устройствах доставки лекарственного средства, как описано в настоящем документе, могут быть использованы для лечения и/или профилактики многих разных типов медицинских расстройств. Примеры расстройств включают, например, сахарный диабет или осложнения, связанные с сахарным диабетом, такие как диабетическая ретинопатия, тромбоэмболитические нарушения, такие как тромбоэмболизм глубокой вены или легочных артерий. Дополнительные примеры расстройств включают острый коронарный синдром (ОКС), стенокардию, инфаркт миокарда, рак, макулярную дегенерацию, воспаление, сенную лихорадку, атеросклероз и/или ревматоидный артрит. Примерами API и лекарственных средств являются те, которые описаны в справочниках, таких как Rote Liste 2014, например, помимо прочего, основные группы 12 (противодиабетические лекарственные средства) или 86 (противоопухолевые лекарственные средства), и Merck Index 15-е издание.
Примеры API для лечения и/или профилактики сахарного диабета 1-го типа или 2-го типа или осложнений, связанных с сахарным диабетом 1-го типа или 2-го типа, включают инсулин, например, человеческий инсулин или аналог или производное человеческого инсулина, глюкагоноподобный пептид (GLP-1), аналоги GLP-1 или агонисты рецептора GLP-1, или их аналог или производное, ингибитор дипептидилпептидазы-4 (DPP4) или его фармацевтически приемлемую соль или сольват, или любую их смесь. В контексте данного документа термины «аналог» и «производное» относятся к полипептиду, который имеет молекулярную структуру, которая формально может быть получена из структуры встречающегося в природе пептида, например, человеческого инсулина, путем делеции и/или замены по меньшей мере одного аминокислотного остатка, содержащегося во встречающемся в природе пептиде, и/или путем добавления по меньшей мере одного аминокислотного остатка. Добавленный и/или замененный аминокислотный остаток могут представлять собой либо кодируемые аминокислотные остатки, либо другие встречающиеся в природе остатки, либо аминокислотные остатки, полученные исключительно синтетическим путем. Аналоги инсулина также называются «лигандами инсулинового рецептора». В частности, термин «производное» относится к полипептиду, который характеризуется молекулярной структурой, которая формально может быть получена из структуры встречающегося в природе пептида, например, таковой человеческого инсулина, в котором один или более органических заместителей (например, жирная кислота) связываются с одной или более аминокислотами. Необязательно, одна или более аминокислот, которые присутствуют во встречающемся в природе пептиде, могут быть удалены и/или замещены другими аминокислотами, в том числе некодируемыми аминокислотами, или аминокислоты, в том числе некодируемые, могут быть добавлены к встречающемуся в природе пептиду.
Примерами аналогов инсулина являются Gly(A21), Arg(B31), Arg(B32) человеческий инсулин (инсулин гларгин); Lys(B3), Glu(B29) человеческий инсулин (инсулин глулизин); Lys(B28), Pro(B29) человеческий инсулин (инсулин лизпро); Asp(B28) человеческий инсулин (инсулин аспарт); человеческий инсулин, в котором пролин в положении B28 заменен на Asp, Lys, Leu, Val или Ala и в котором в положении B29 Lys может быть заменен на Pro; Ala(B26) человеческий инсулин; дез(B28-B30) человеческий инсулин; дез(B27) человеческий инсулин и дез(B30) человеческий инсулин.
Примерами производных инсулина являются, например, B29-N-миристоил-дез (B30) человеческий инсулин, Lys(B29) (N-тетрадеканоил)-дез(B30) человеческий инсулин (инсулин детемир, Levemir®); B29-N-пальмитоил-дез (B30) человеческий инсулин; B29-N-миристоил человеческий инсулин; B29-N-пальмитоил человеческий инсулин; B28-N-миристоил LysB28ProB29 человеческий инсулин; B28-N-пальмитоил-LysB28ProB29 человеческий инсулин; B30-N-миристоил-ThrB29LysB30 человеческий инсулин; B30-N-пальмитоил-ThrB29LysB30 человеческий инсулин; B29-N-(N-пальмитоил-гамма-глутамил)-дез(B30) человеческий инсулин, B29-N-омега-карбоксипентадеканоил-гамма-L-глутамил-дез (B30) человеческий инсулин (инсулин деглюдек, Tresiba®); B29-N- (N-литохолил-гамма-глутамил)-дез(B30) человеческий инсулин; B29-N-(ω-карбоксигептадеканоил) -дез(B30) человеческий инсулин и B29-N-(ω-карбоксигептадеканоил) человеческий инсулин.
Примерами GLP-1, аналогов GLP-1 и агонистов рецептора GLP-1 являются, например, ликсисенатид (Lyxumia®), эксенатид (Exendin-4, Byetta®, Bydureon®), пептид из 39 аминокислот, который продуцируется слюнными железами аризонского ядозуба), лираглутид (Victoza®), семаглутид, таспоглутид, альбиглутид (Syncria®), дулаглутид (Trulicity®), rExendin-4, CJC-1134-PC, PB-1023, TTP-054, Langlenatide/HM-11260C, CM-3, GLP-1 Eligen, ORMD-0901, NN-9924, NN-9926, NN-9927, нодексен, Viador-GLP-1, CVX-096, ZYOG-1, ZYD-1, GSK-2374697, DA-3091, MAR-701, MAR709, ZP-2929, ZP-3022, TT-401, BHM-034. MOD-6030, CAM-2036, DA-15864, ARI-2651, ARI-2255, эксенатид-XTEN и глюкагон-Xten.
Примером олигонуклеотида является, например, мипомерсен натрия (Kynamro®), снижающее уровень холестерола антисмысловое терапевтическое средство для лечения семейной гиперхолестеринемии.
Примерами ингибиторов DPP4 являются вилдаглиптин, ситаглиптин, денаглиптин, саксаглиптин, берберин.
Примеры гормонов включают гормоны гипофиза, или гормоны гипоталамуса, или регуляторные активные пептиды и их антагонисты, такие как гонадотропин (фоллитропин, лутропин, хорионгонадотропин, менотропин), соматропин (Somatropin), десмопрессин, терлипрессин, гонадорелин, трипторелин, леупрорелин, бусерелин, нафарелин и гозерелин.
Примеры полисахаридов включают глюкозаминогликан, гиалуроновую кислоту, гепарин, низкомолекулярный гепарин или сверхнизкомолекулярный гепарин или его производное, или сульфатированный полисахарид, например, полисульфированную форму вышеупомянутых полисахаридов, и/или их фармацевтически приемлемую соль. Примером фармацевтически приемлемой соли полисульфатированного низкомолекулярного гепарина является эноксапарин натрия. Примером производного гиалуроновой кислоты является Гилан G-F 20 (Synvisc®), гиалуронат натрия.
Термин «антитело» в контексте настоящего документа относится к молекуле иммуноглобулина или ее антигенсвязывающей части. Примеры антигенсвязывающих частей молекул иммуноглобулина включают фрагменты F(ab) и F(ab')2, которые сохраняют способность связывать антиген. Антитело может быть поликлональным, моноклональным, рекомбинантным, химерным, деиммунизированным или гуманизированным, полностью человеческим, не человеческим (например, мышиным) или одноцепочечным антителом. В некоторых вариантах осуществления антитело обладает эффекторной функцией и может связывать комплемент. В некоторых вариантах осуществления антитело не обладает или обладает сокращенной способностью связывать Fc-рецептор. Например, антитело может представлять собой изотип или подтип, фрагмент или мутант антитела, который не поддерживает связывание с Fc-рецептором, например, обладает подвергнутой мутагенезу или удаленной областью связывания Fc-рецептора. Термин «антитело» также включает антигенсвязывающую молекулу на основе тетравалентных биспецифических тандемных иммуноглобулинов (TBTI) и/или антителоподобного связывающего белка с двойной вариабельной областью, характеризующегося перекрестной ориентацией области связывания (CODV).
Термины «фрагмент» или «фрагмент антитела» относятся к полипептиду, полученному из молекулы полипептида антитела (например, полипептида легкой и/или тяжелой цепи антитела), которая не содержит полноразмерного полипептида антитела, но все же содержит по меньше мере часть полноразмерного полипептида антитела, который способен связываться с антигеном. Фрагменты антитела могут содержать расщепленную часть полноразмерного полипептида антитела, хотя термин и не ограничен такими расщепленными фрагментами. Фрагменты антител, которые применимы в настоящем изобретении, включают, например, Fab-фрагменты, F(ab')2-фрагменты, scFv (одноцепочечные Fv) фрагменты, линейные антитела, моноспецифические или мультиспецифические фрагменты антител, такие как биспецифические, триспецифические, тетраспецифические и мультиспецифические антитела (например, диатела, триотела, тетратела), моновалентные или поливалентные фрагменты антител, такие как бивалентные, тривалентные, тетравалентные и поливалентные антитела, минитела, хелатирующие рекомбинантные антитела, триотела или битела, интратела, нанотела, малые модульные иммунофармацевтические препараты (SMIP), слитые белки, связывающие домен иммуноглобулина, камелидные антитела и антитела, содержащие VHH. В данной области известны дополнительные примеры антигенсвязывающих фрагментов антитела.
Термины «определяющий комплементарность участок» или «CDR» относятся к коротким полипептидным последовательностям в вариабельной области и полипептидов тяжелых цепей, и полипептидов легких цепей, которые преимущественно отвечают за опосредование распознавания специфичных антигенов. Термин «каркасная область» относится к аминокислотным последовательностям в вариабельной области и полипептидов тяжелых цепей, и полипептидов легких цепей, которые не являются последовательностями CDR и преимущественно отвечают за поддержание точного расположения последовательностей CDR для обеспечения возможности связывания антигенов. Хотя сами каркасные области обычно непосредственно не принимают участия в связывании антигена, как известно в данной области техники, определенные остатки в каркасных областях определенных антител могут непосредственно принимать участие в связывании антигенов или могут оказывать влияние на способность одной или более аминокислот в CDR взаимодействовать с антигеном. Примерами антител являются anti PCSK-9 mAb (например, алирокумаб), anti IL-6 mAb (например, сарилумаб) и anti IL-4 mAb (например, дупилумаб).
Фармацевтически приемлемые соли любых API, описанных в настоящем документе, также рассматриваются для применения в лекарственном средстве или лекарственном препарате в устройстве доставки лекарственного средства. Фармацевтически приемлемыми солями являются, например, соли присоединения кислот и основные соли.
Специалисты в данной области техники поймут, что модификации (добавления и/или удаления) различных компонентов API, составов, устройств, способов, систем и вариантов осуществления, описанных в настоящем документе, можно осуществлять без отклонения от полного объема и сущности настоящего изобретения, которые охватывают подобные модификации и любые и все их эквиваленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СБОРА ДАННЫХ, ПРИКРЕПЛЯЕМОЕ К ИНЪЕКЦИОННОМУ УСТРОЙСТВУ | 2017 |
|
RU2754301C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО И РЕГИСТРИРУЮЩЕЕ ПРИСПОСОБЛЕНИЕ | 2019 |
|
RU2793643C2 |
| ЭЛЕКТРОННЫЙ МОДУЛЬ И МОДУЛЬНАЯ СИСТЕМА ДЛЯ УСТРОЙСТВА ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2020 |
|
RU2827952C1 |
| МЕДИЦИНСКОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ОСВЕТИТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ | 2012 |
|
RU2627635C2 |
| СИСТЕМА ДЛЯ УСТРОЙСТВА ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА И УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2021 |
|
RU2839348C1 |
| ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРИСОЕДИНЕНИЯ К ИНЪЕКЦИОННОМУ УСТРОЙСТВУ | 2013 |
|
RU2638620C2 |
| СБОРНАЯ УПАКОВКА ДЛЯ УСТРОЙСТВА ДЛЯ ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2013 |
|
RU2660372C2 |
| ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ НА ИНЪЕКЦИОННОМ УСТРОЙСТВЕ | 2013 |
|
RU2628052C2 |
| Способ и устройство для доставки лекарственных средств | 2008 |
|
RU2618952C2 |
| УСТРОЙСТВА ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2019 |
|
RU2778067C1 |
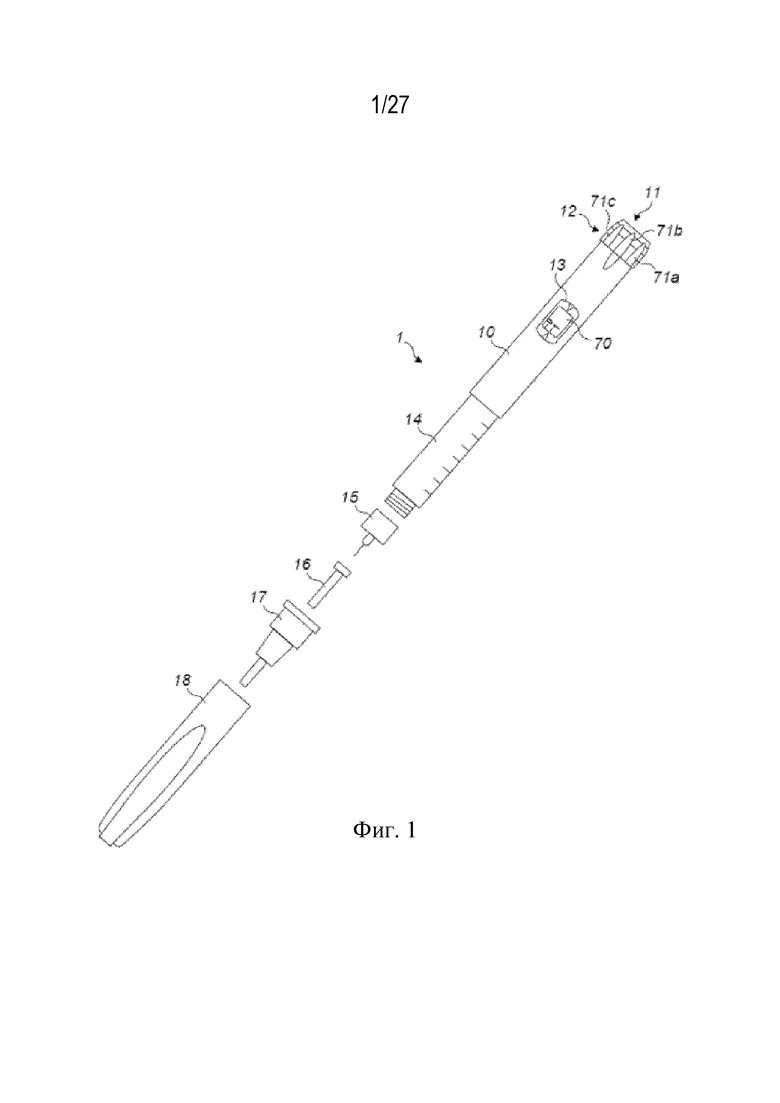
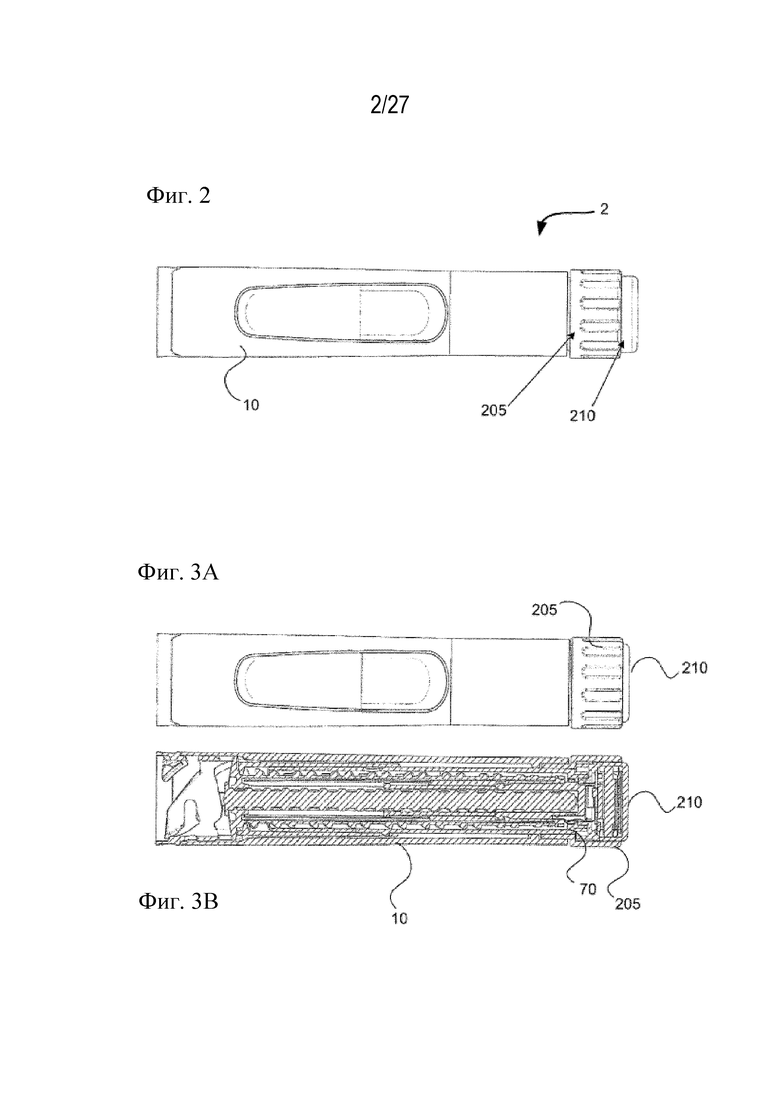
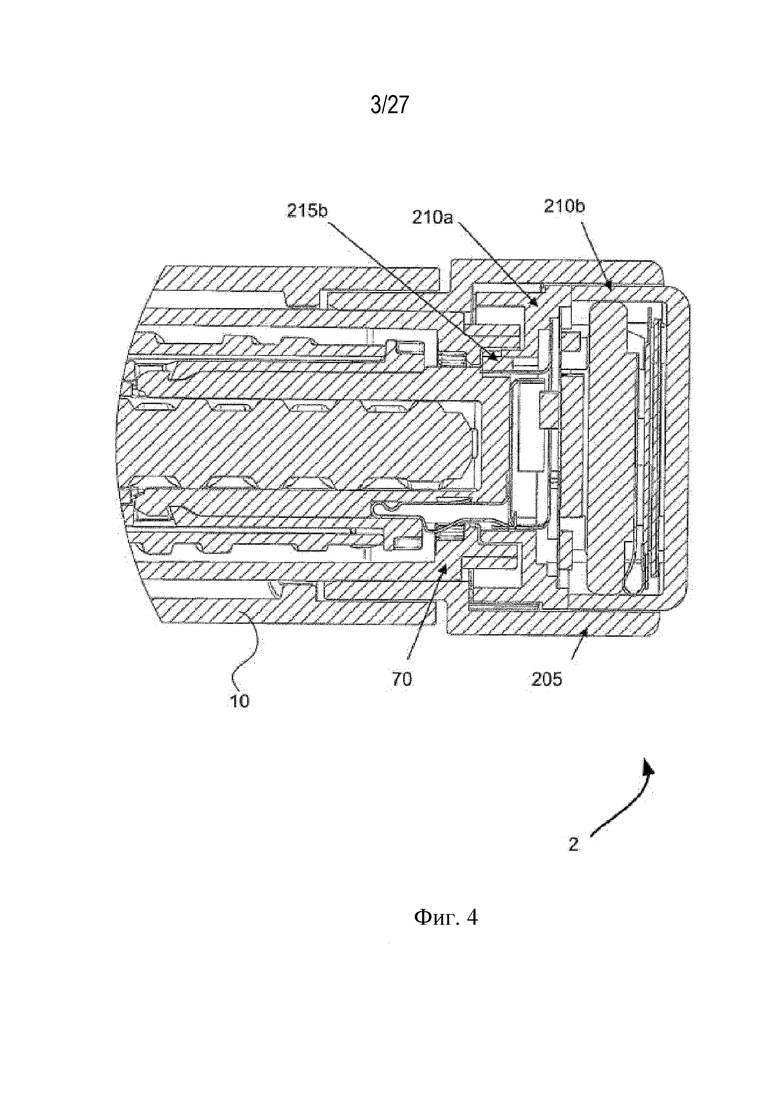
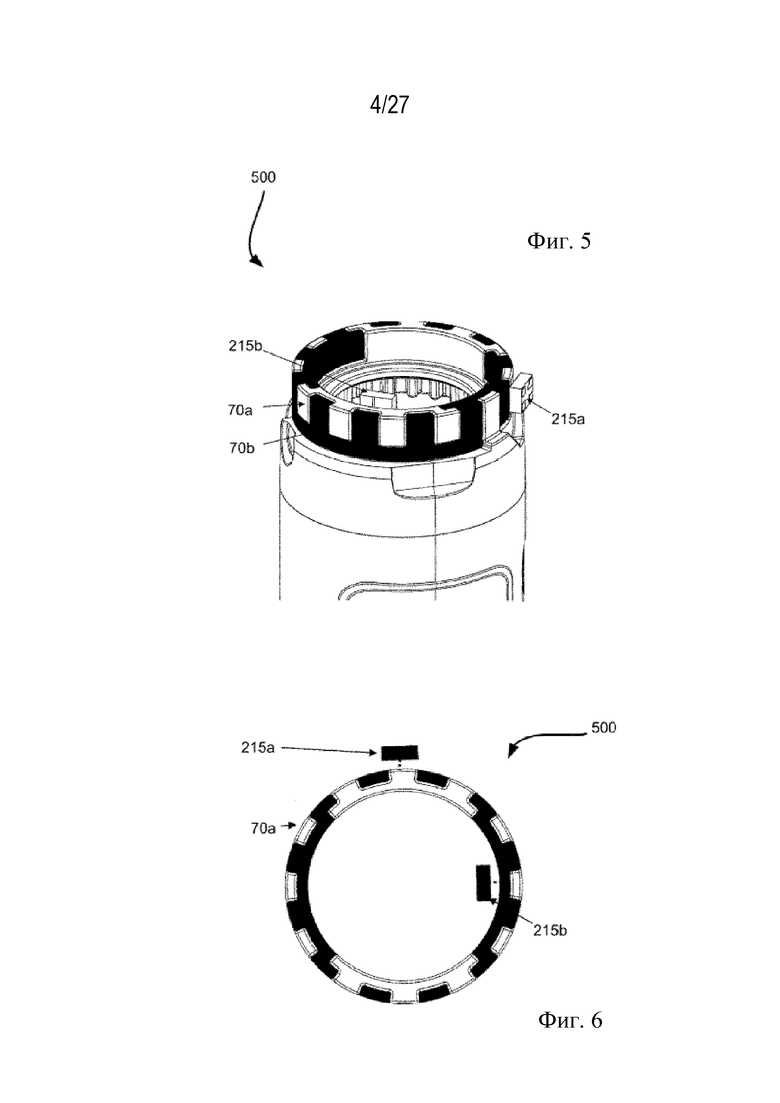
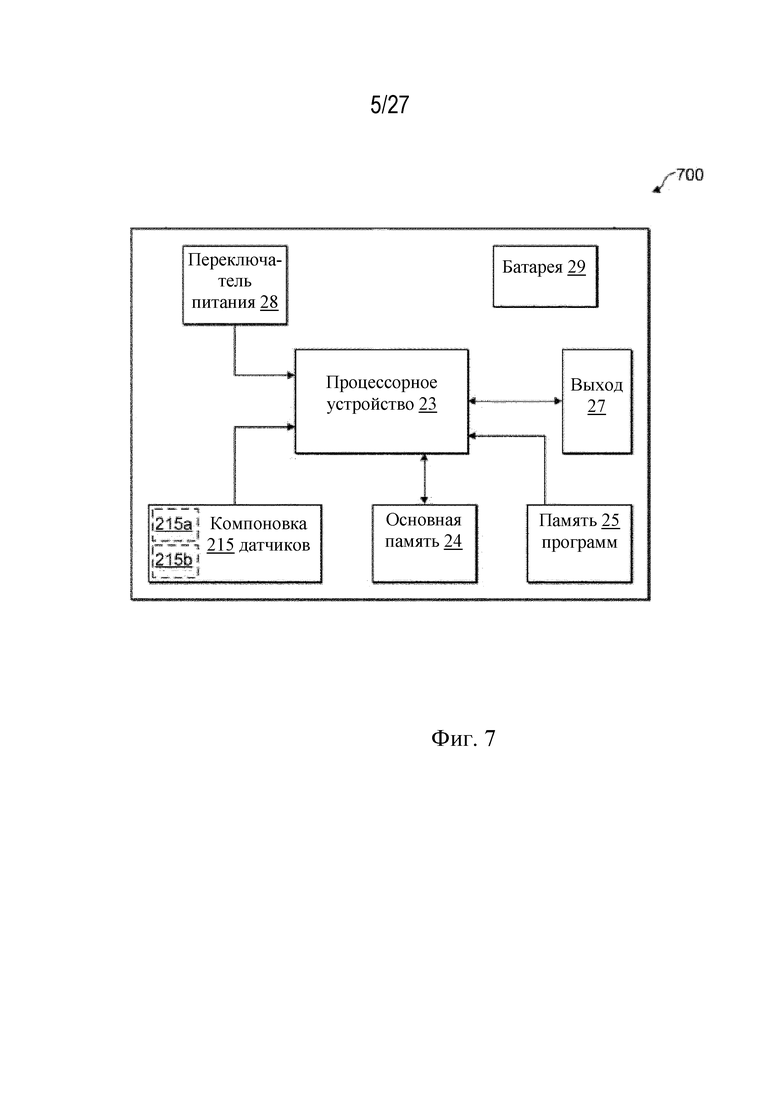
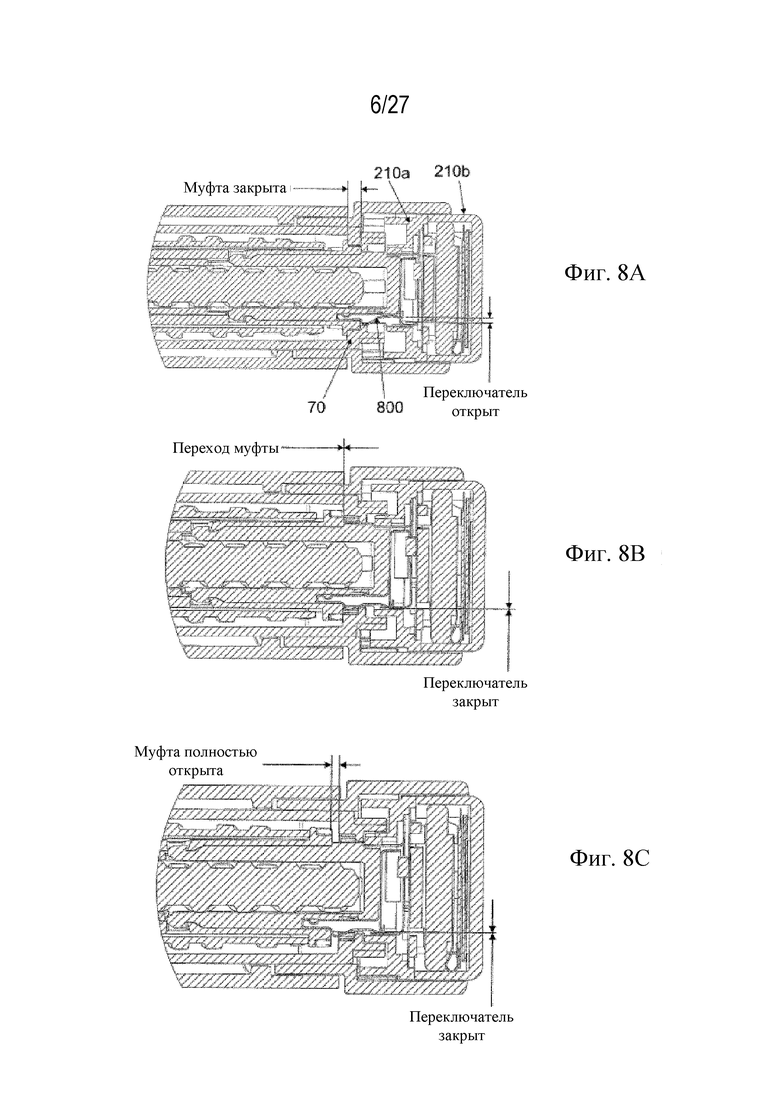
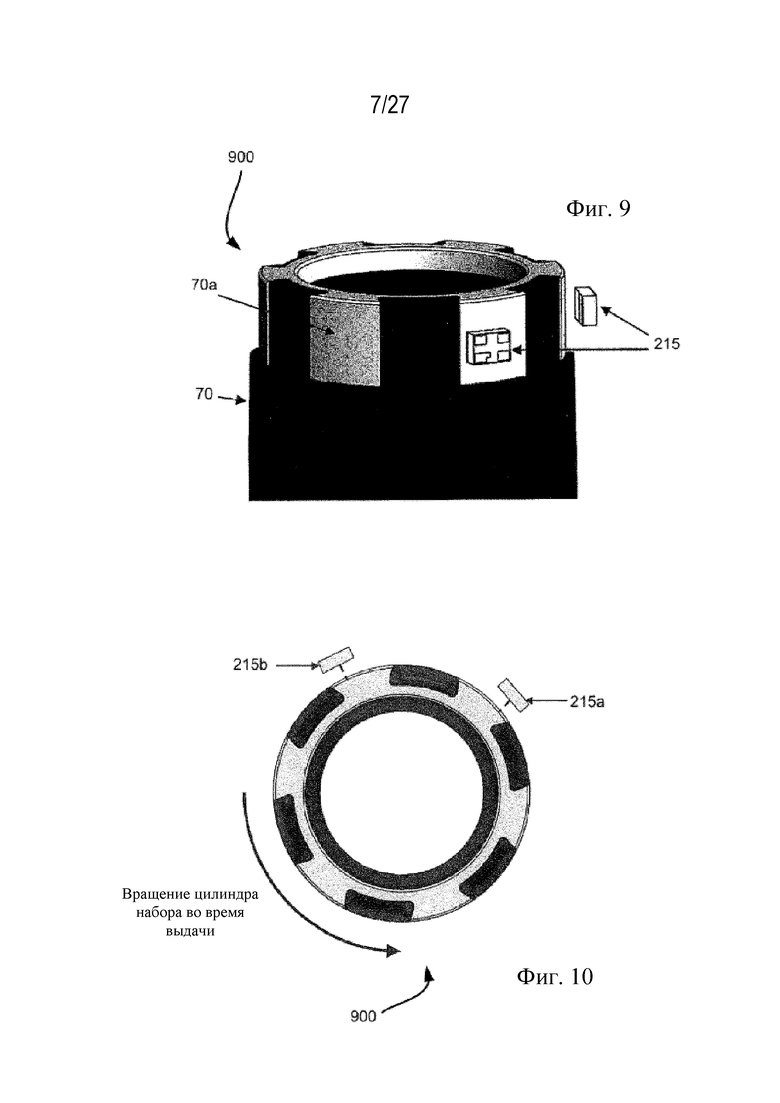
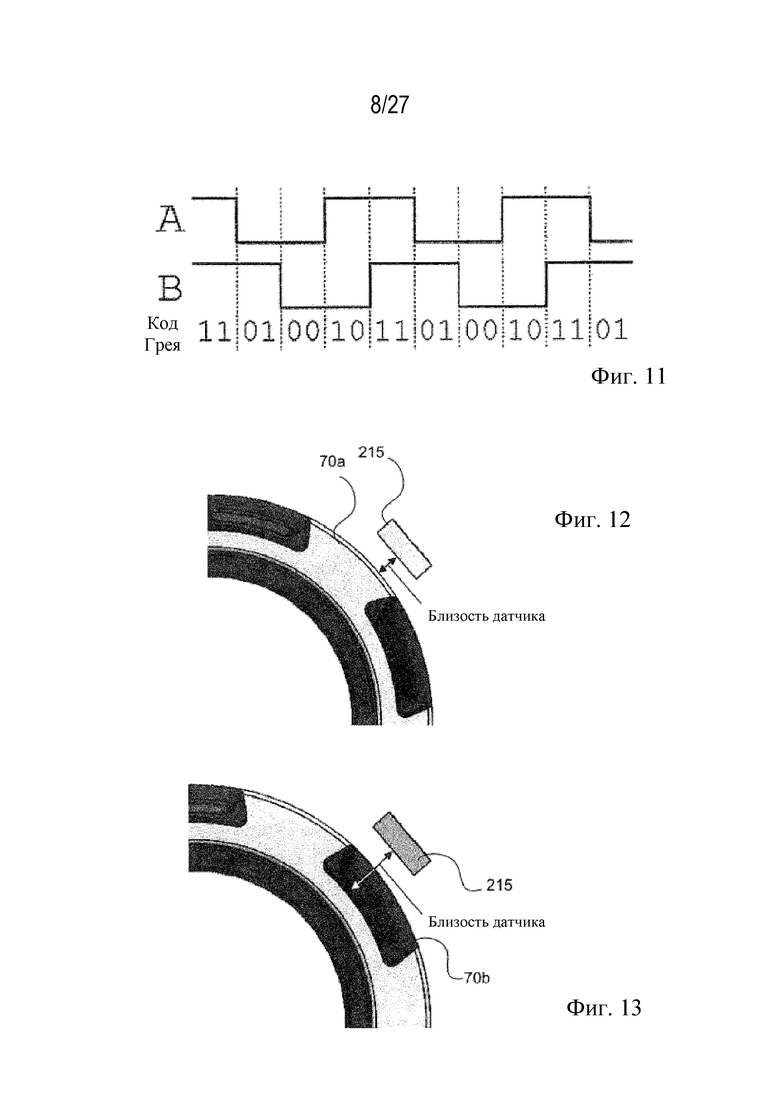
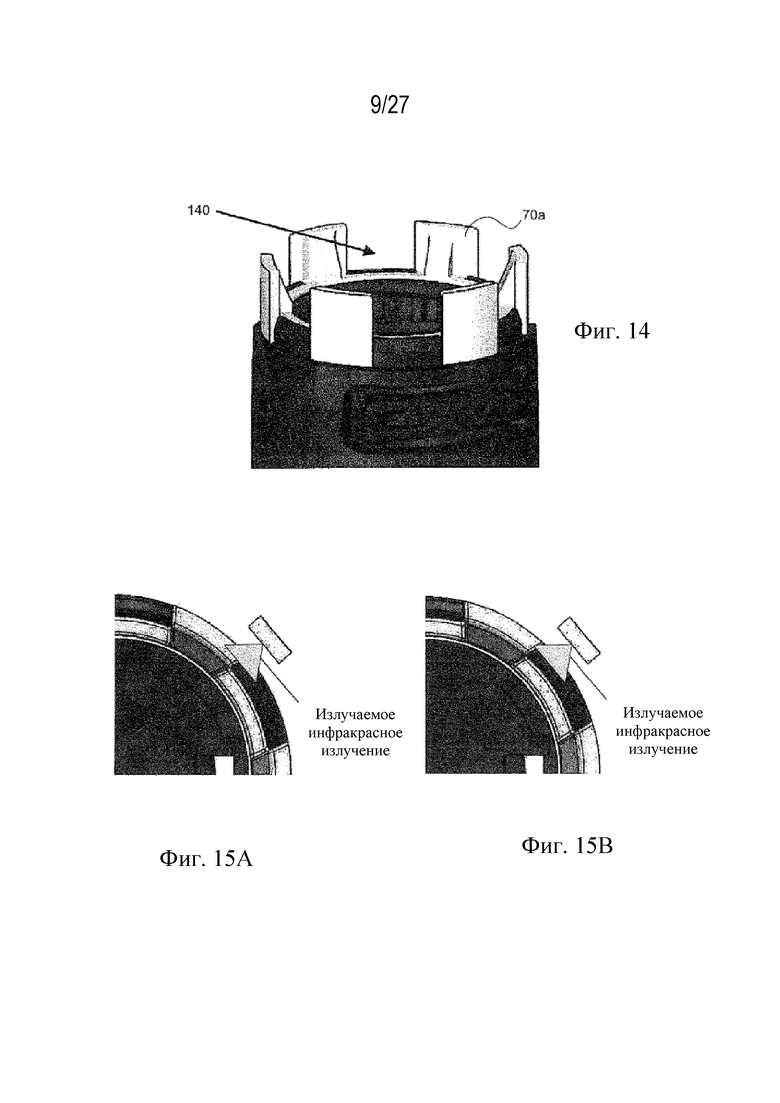
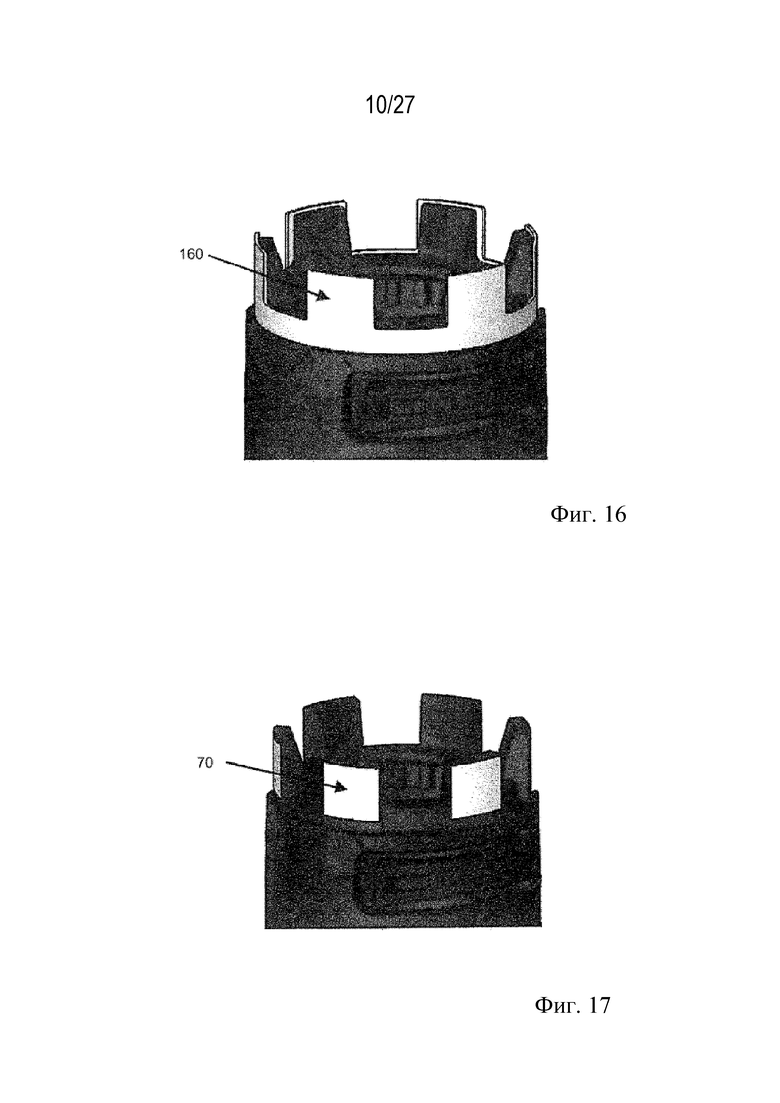
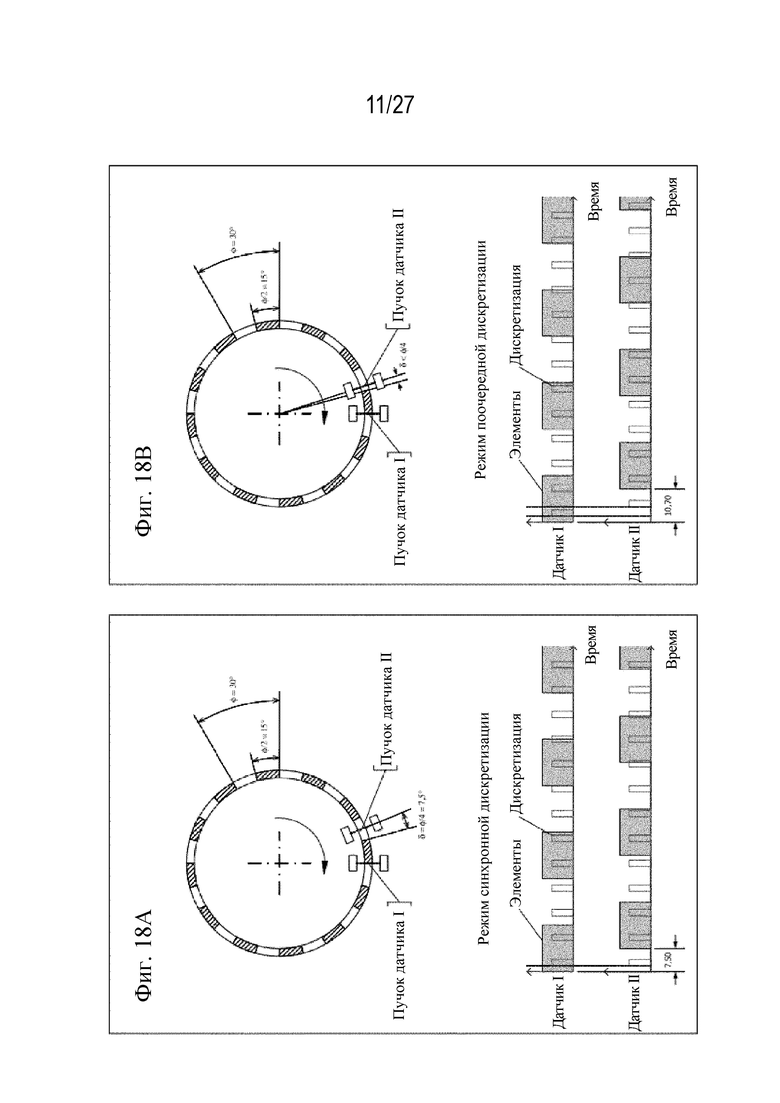
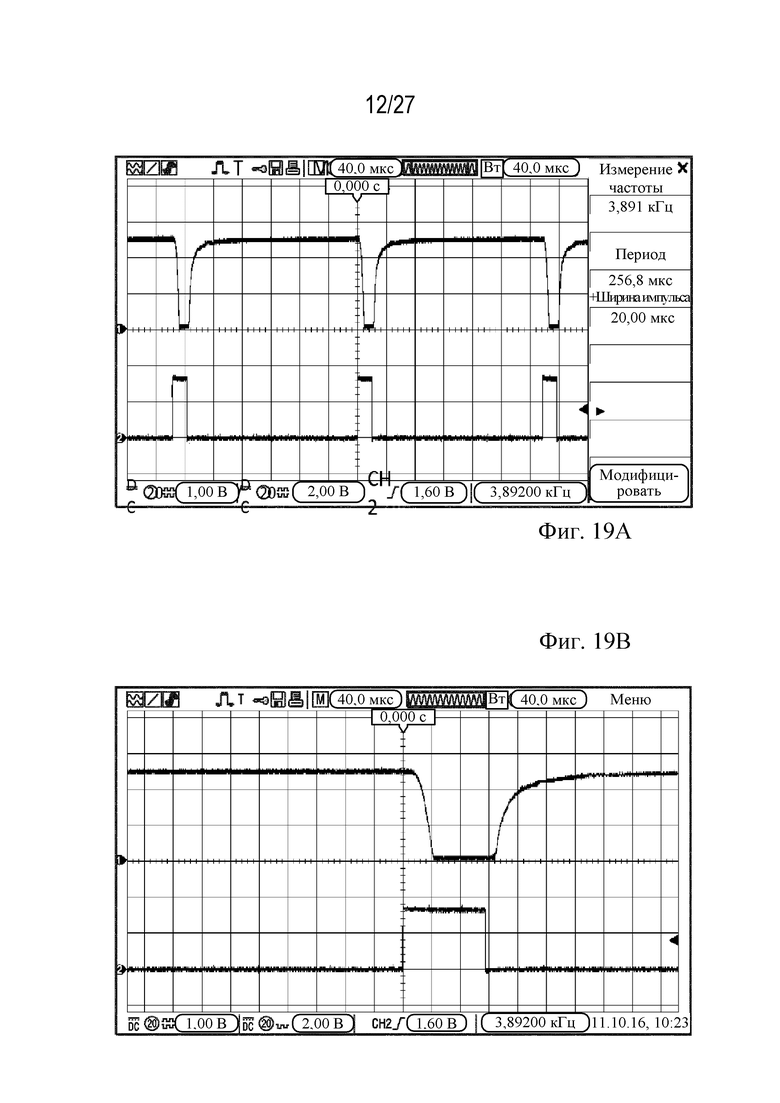
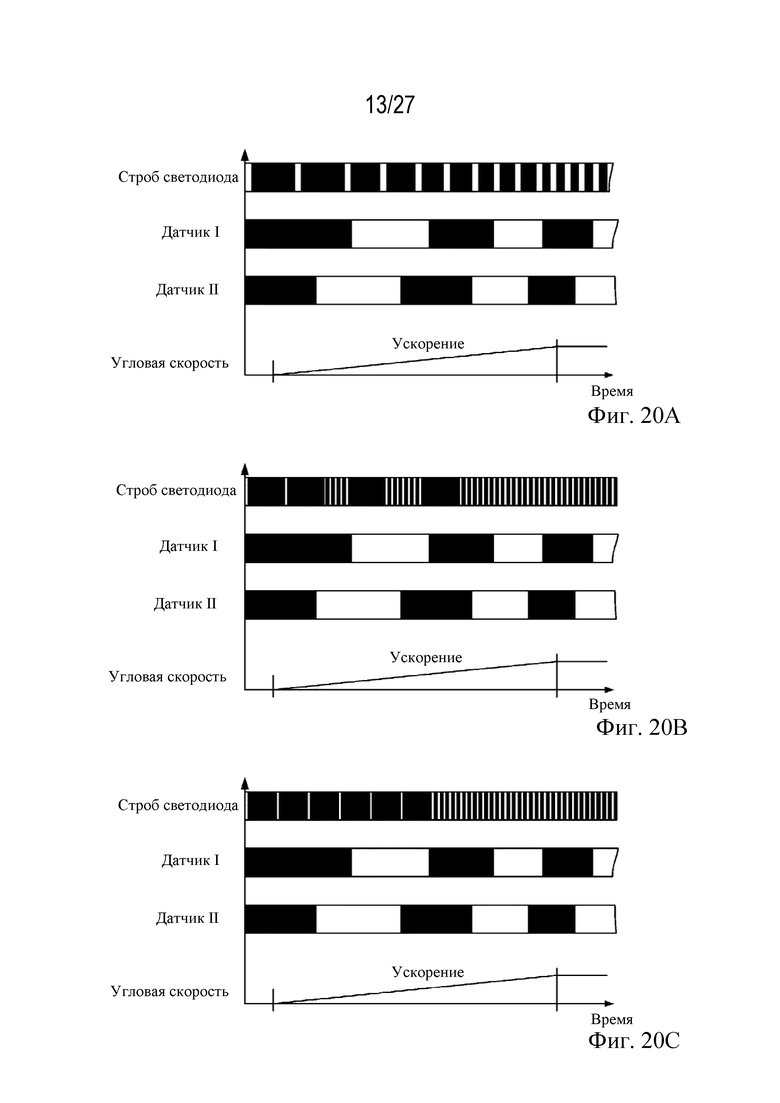
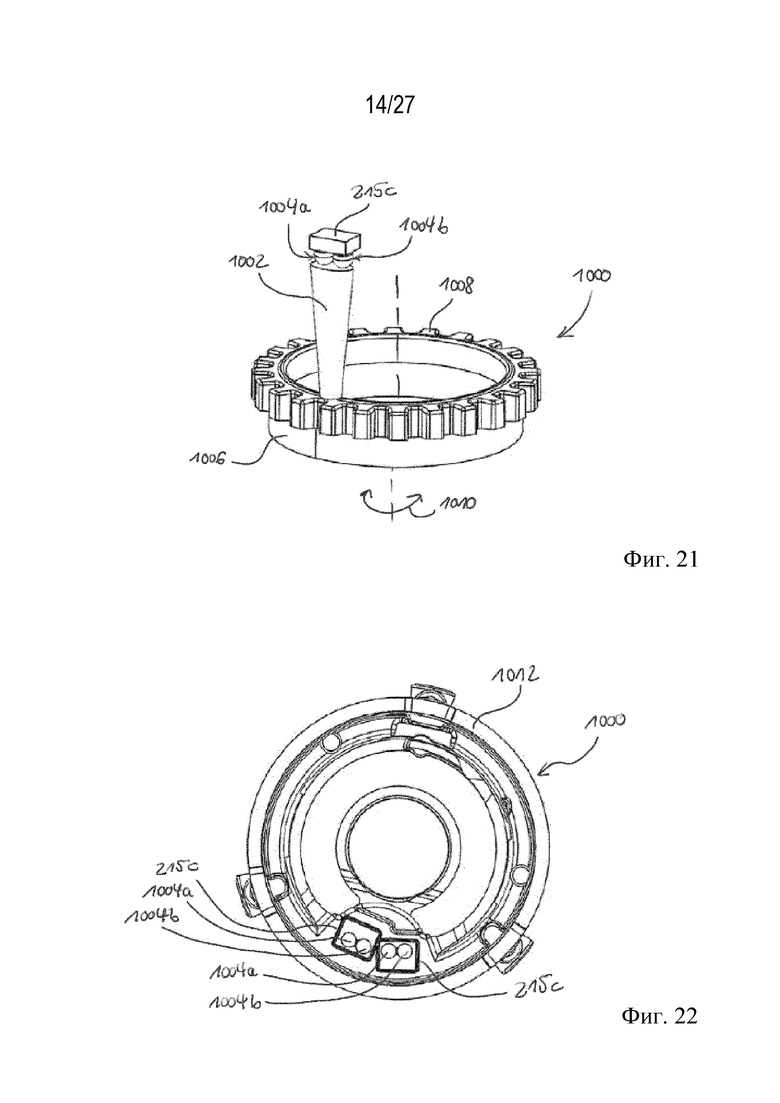
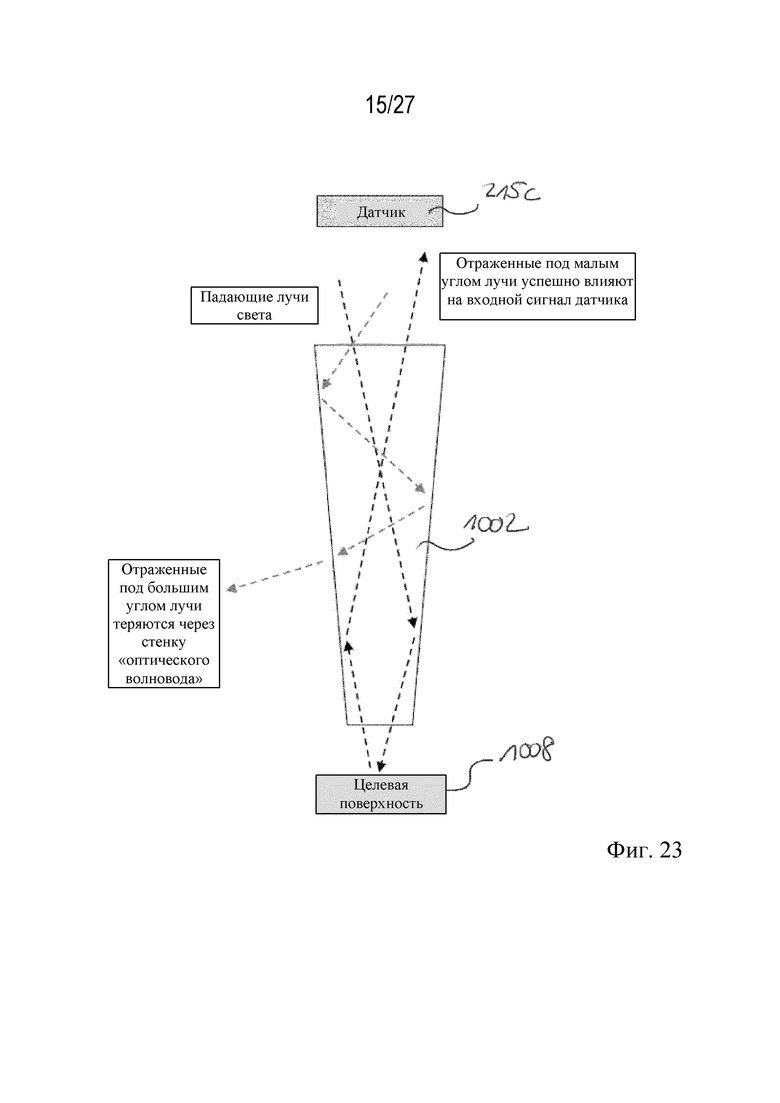
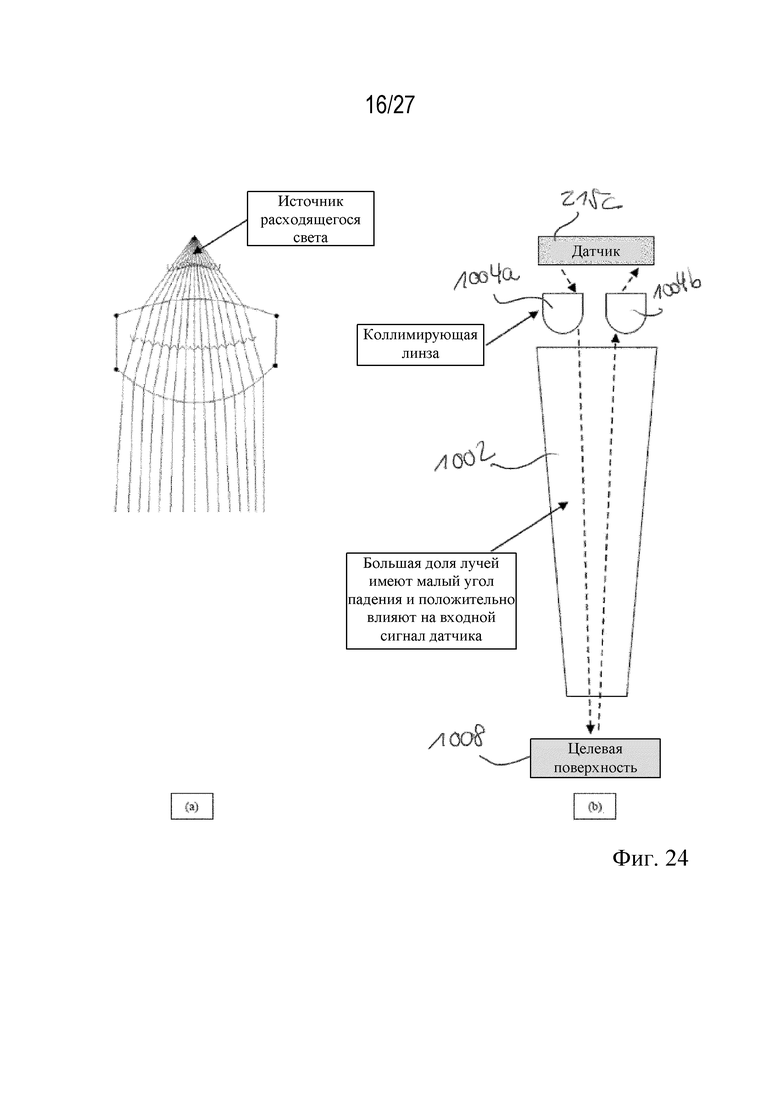
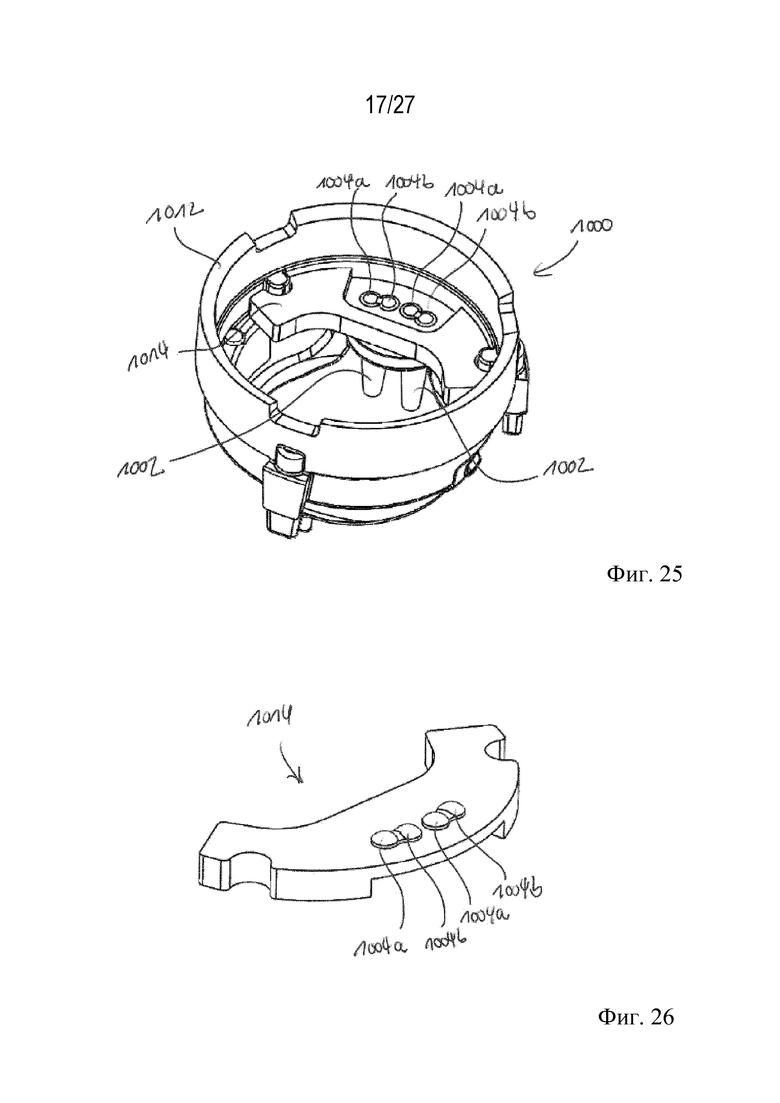
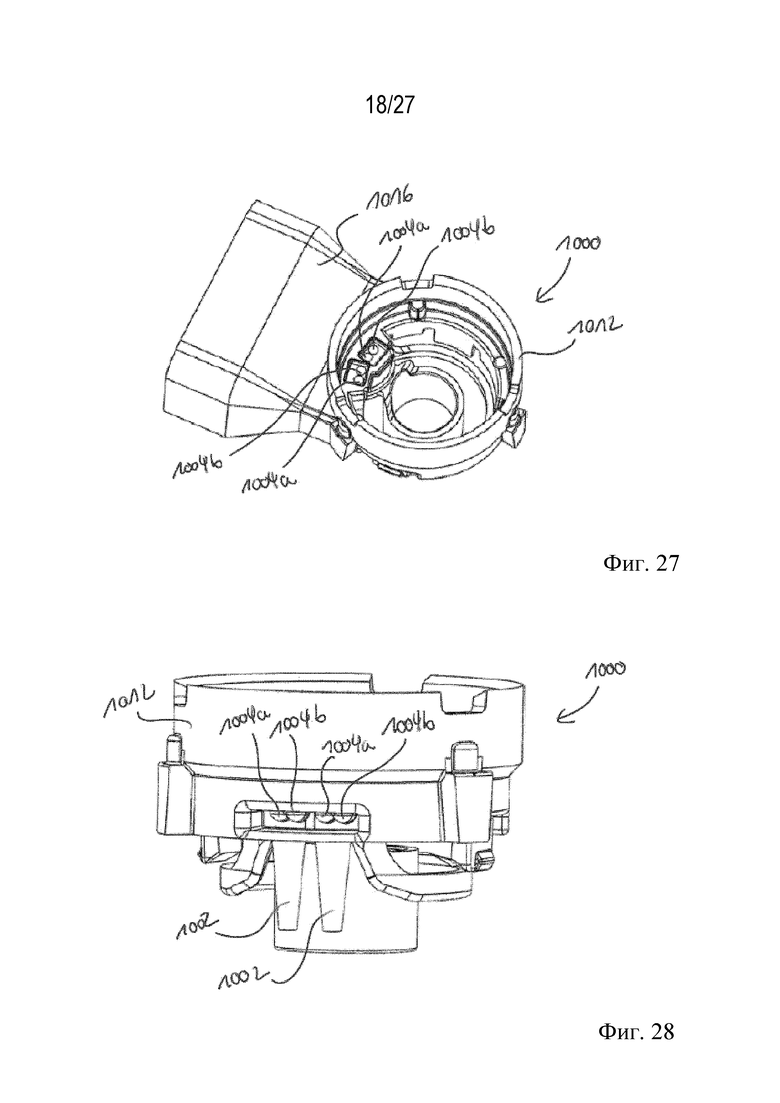
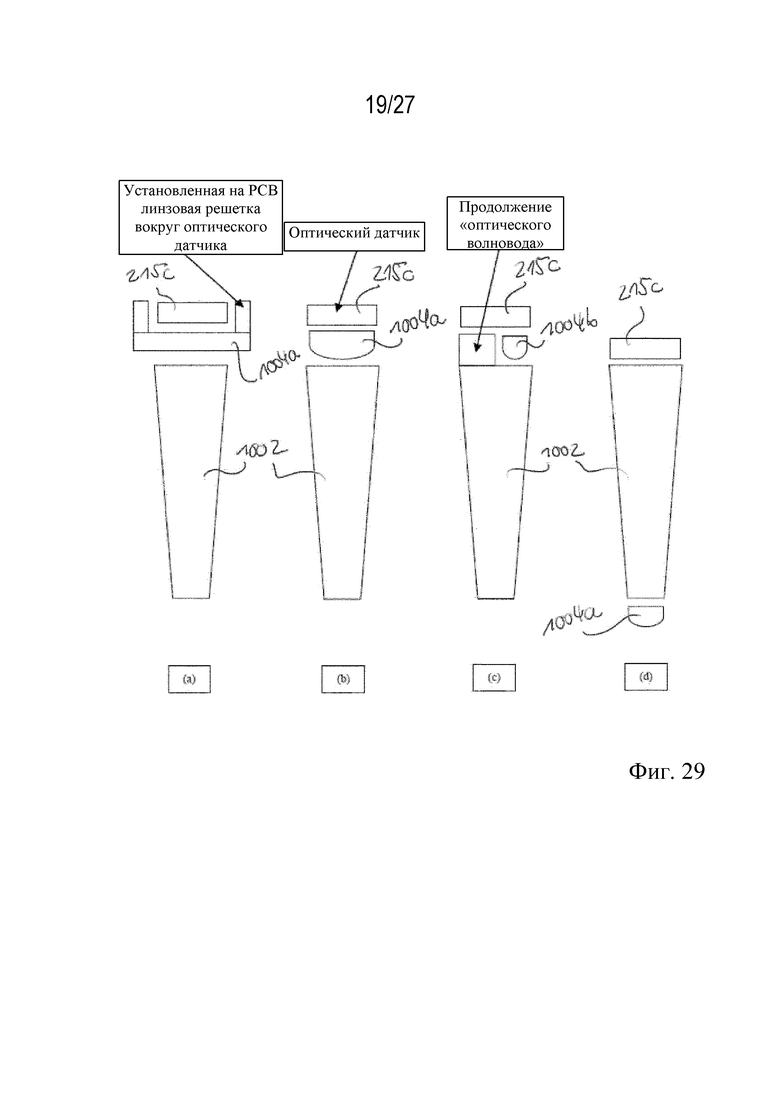
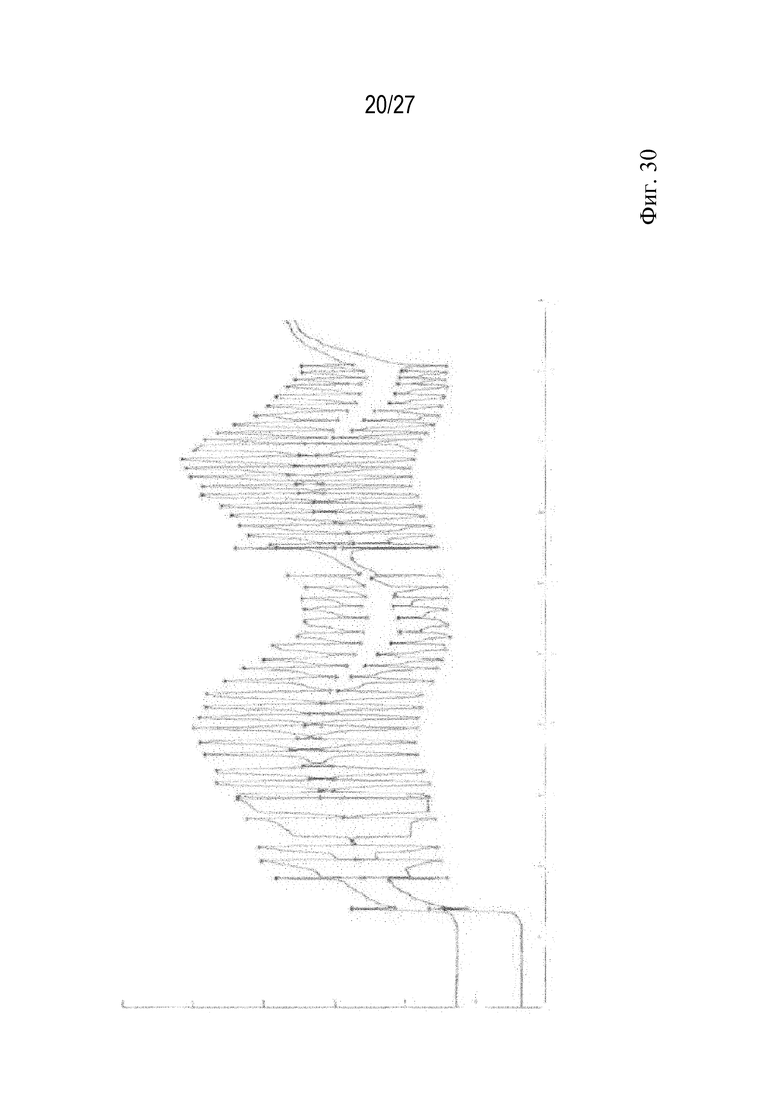
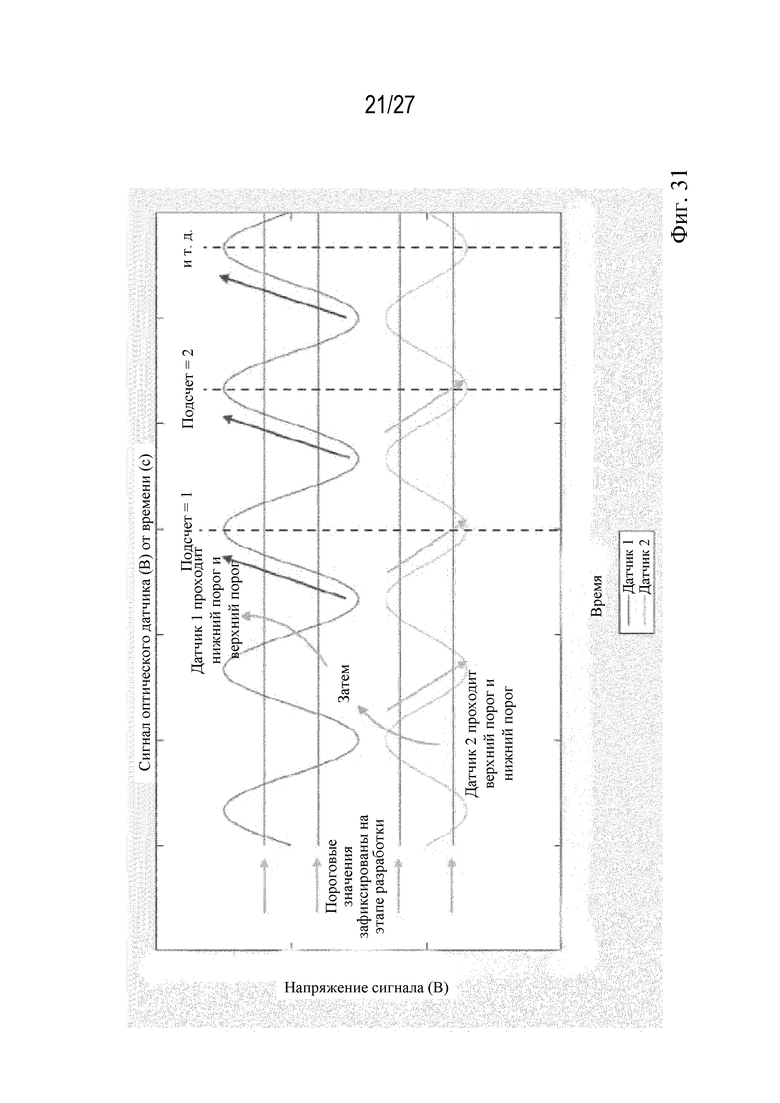
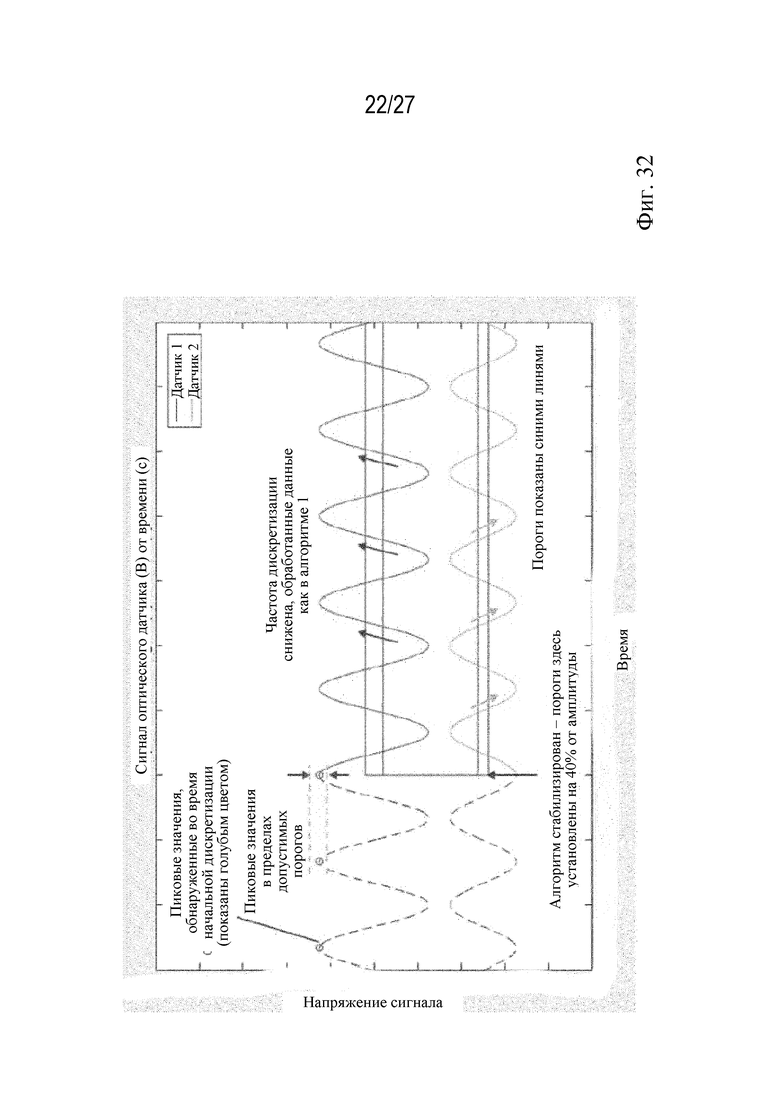
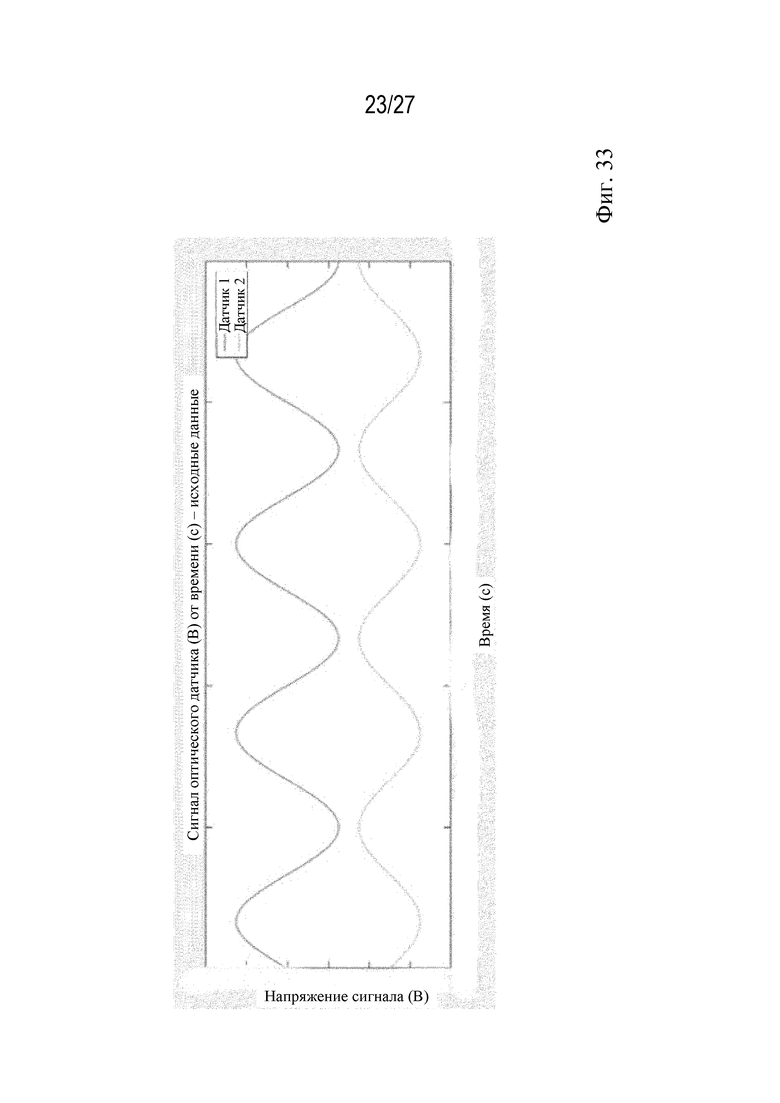
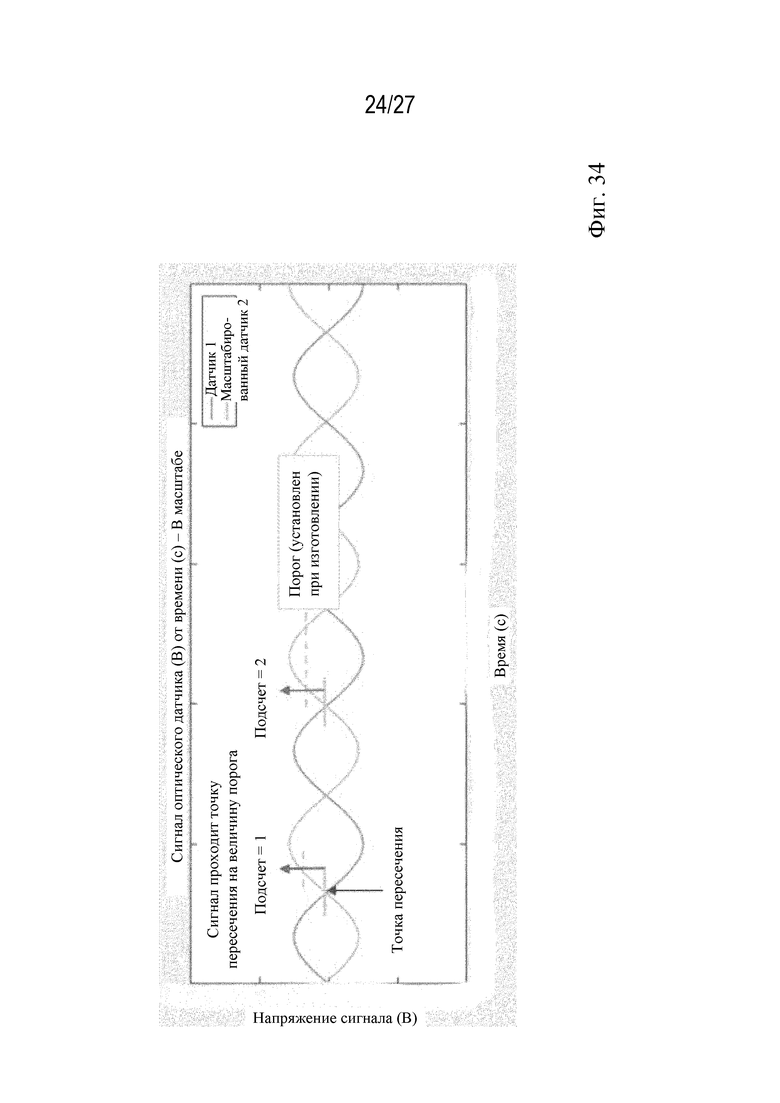
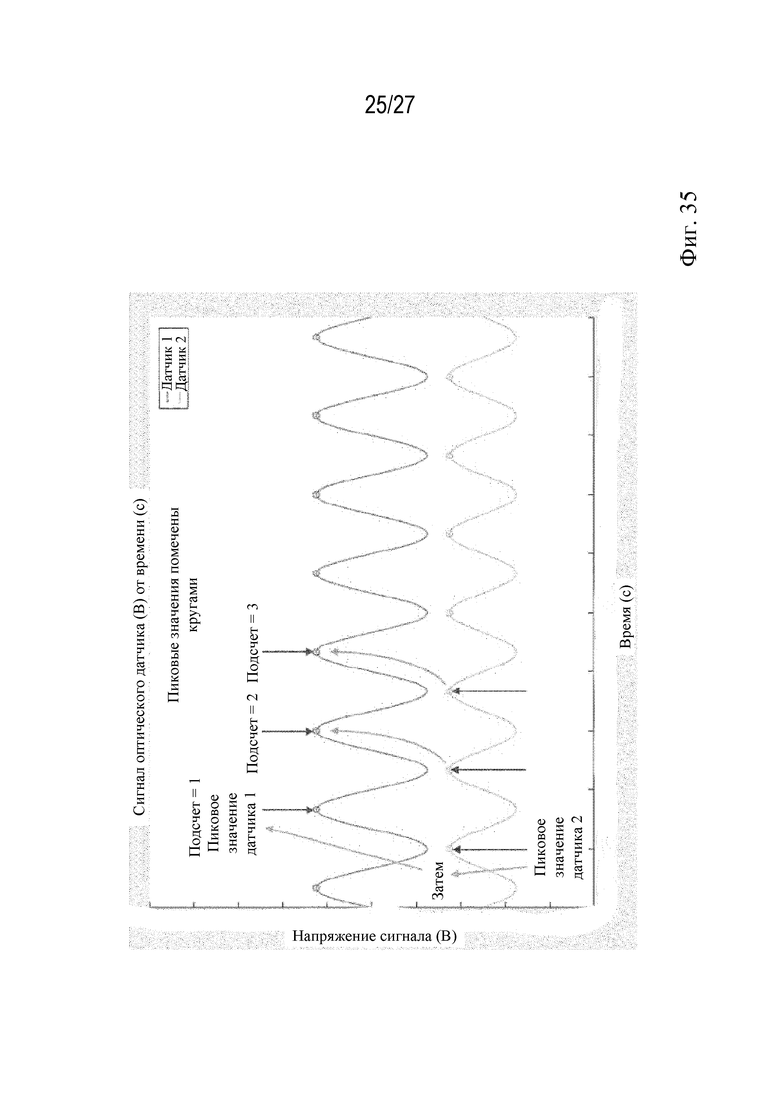
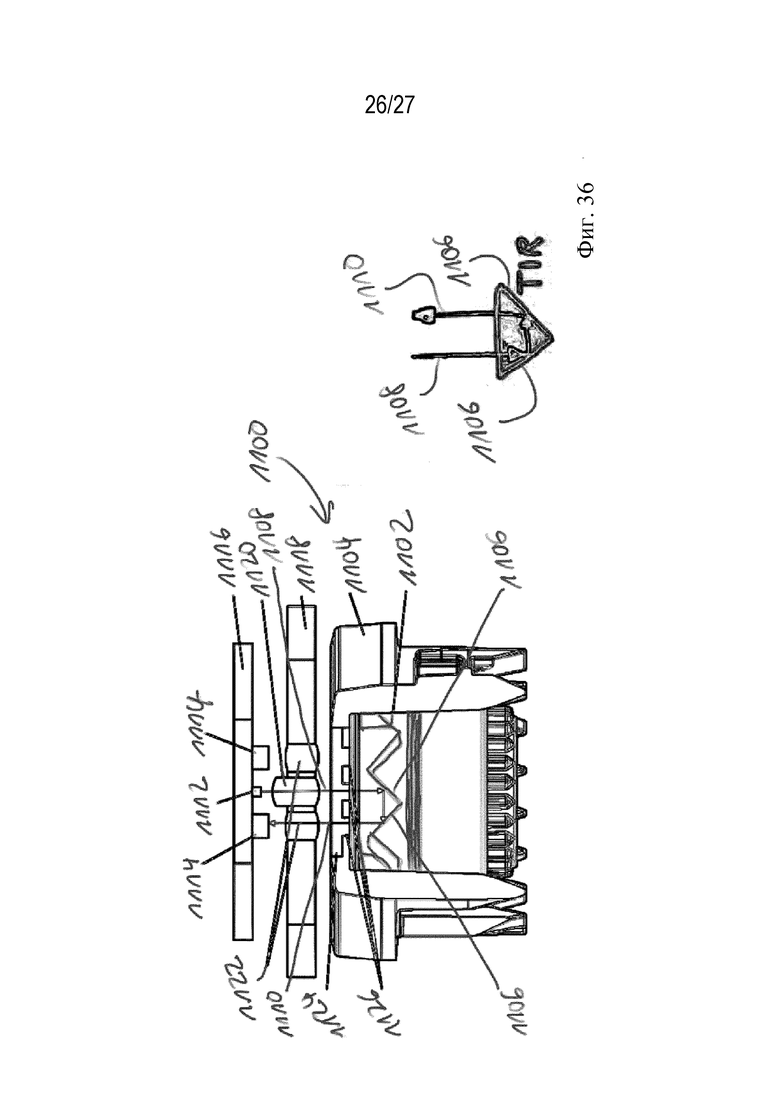
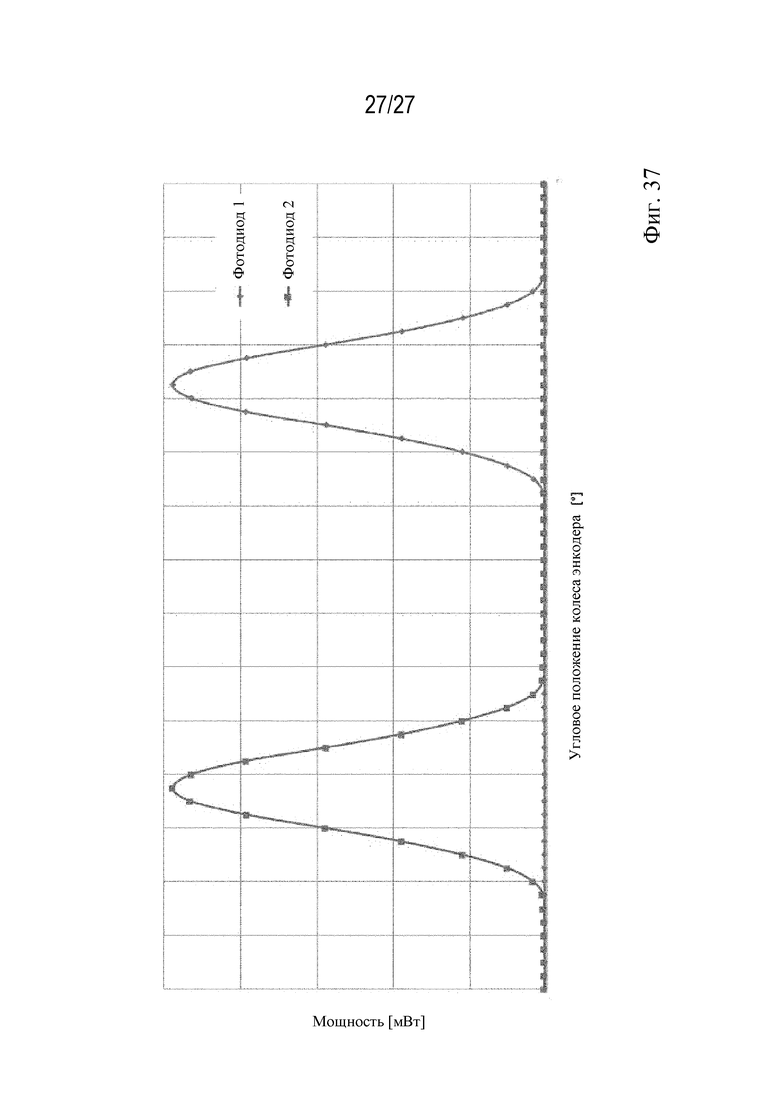
Настоящее изобретение относится к медицинской технике, а именно к устройствам для инъекции лекарственного препарата. Согласно первому аспекту в настоящем изобретении описывается устройство для инъекции, содержащее: подвижный компонент программирования дозировки, содержащий систему поворотного энкодера, имеющую заданную угловую периодичность; узел датчиков, содержащий первый оптический датчик, выполненный с возможностью обнаружения перемещения подвижного компонента программирования дозировки относительно узла датчиков во время дозирования лекарственного препарата, причем первый оптический датчик выполнен с возможностью работы в режиме строб-дискретизации на первой частоте; второй оптический датчик, выполненный с возможностью обнаружения перемещения системы поворотного энкодера относительно второго оптического датчика, причем второй оптический датчик выполнен с возможностью работы в режиме строб-дискретизации на второй частоте, меньшей, чем первая частота; и процессорное устройство, выполненное с возможностью определения дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения. 6 н. и 25 з.п. ф-лы, 37 ил.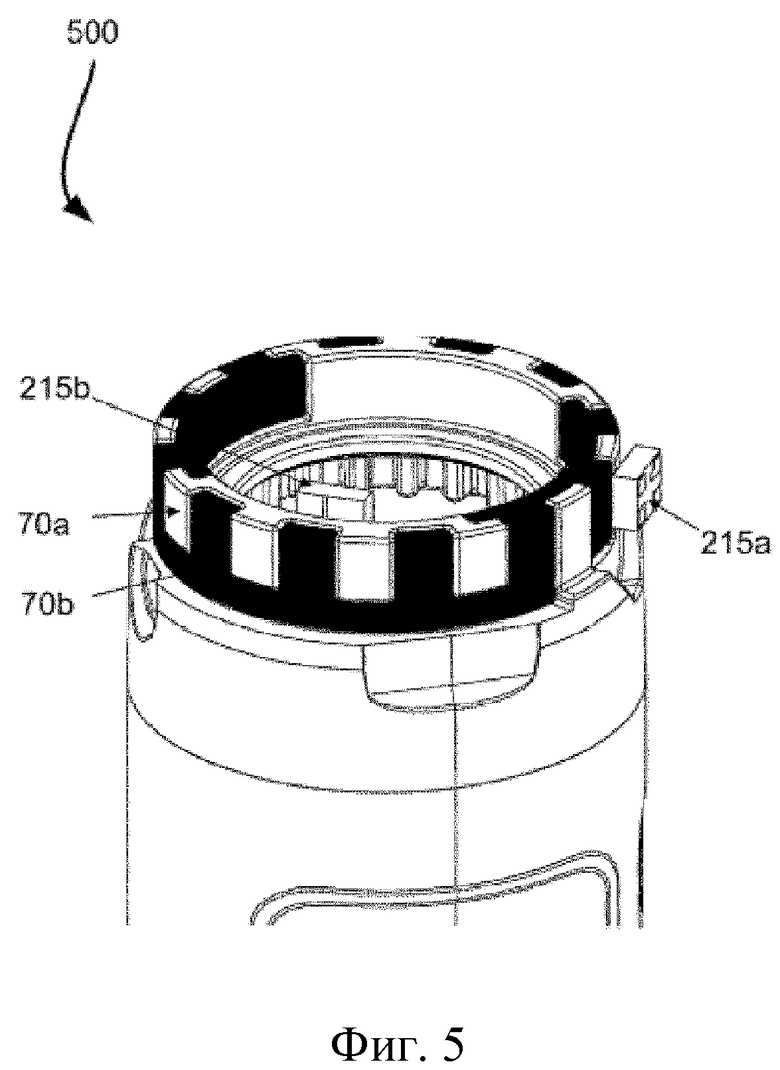
1. Устройство для инъекции, содержащее:
подвижный компонент программирования дозировки, содержащий систему поворотного энкодера, имеющую заданную угловую периодичность;
узел датчиков, содержащий первый оптический датчик, выполненный с возможностью обнаружения перемещения подвижного компонента программирования дозировки относительно узла датчиков во время дозирования лекарственного препарата, причем первый оптический датчик выполнен с возможностью работы в режиме строб-дискретизации вдоль первого временного ряда стробирующих импульсов, и второй оптический датчик, выполненный с возможностью обнаружения перемещения системы поворотного энкодера относительно второго оптического датчика, причем второй оптический датчик выполнен с возможностью работы в режиме строб-дискретизации вдоль второго временного ряда стробирующих импульсов, при этом первый и второй временные ряды имеют плотность импульсов на единицу времени и/или относительную фазу импульсов, изменяющуюся в соответствии с кинематическим состоянием компонента программирования дозы; и
процессорное устройство, выполненное с возможностью определения дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения.
2. Устройство для инъекции по п. 1, в котором система поворотного энкодера выполнена с возможностью вращения относительно первого оптического датчика во время режима работы по набору устройства для инъекции.
3. Устройство для инъекции по п. 1 или 2, в котором система поворотного энкодера содержит кольцо энкодера, содержащее множество по существу светоотражающих меток, расположенных по окружности вокруг кольца энкодера в соответствии с заданной периодичностью.
4. Устройство для инъекции по п. 3, в котором кольцо энкодера содержит множество по существу светопоглощающих меток, расположенных так, чтобы чередоваться с множеством по существу светоотражающих меток в соответствии с заданной периодичностью.
5. Устройство для инъекции по п. 3, в котором боковые края множества по существу светоотражающих меток наклонены внутрь.
6. Устройство для инъекции по любому из предыдущих пунктов, в котором второй оптический датчик выполнен с возможностью работы в режиме строб-дискретизации на второй частоте, меньшей, чем первая частота.
7. Устройство для инъекции по п. 6, в котором первый и второй оптические датчики имеют угловое смещение, равное половине заданной угловой периодичности, и при этом первый и второй оптические датчики выполнены с возможностью работы в синхронном режиме работы.
8. Устройство для инъекции по п. 6, в котором первый и второй оптические датчики имеют угловое смещение, которое отличается от половины заданной угловой периодичности, и при этом первый и второй оптические датчики выполнены с возможностью работы в поочередном режиме работы со временем смещения между дискретизацией на первом и втором оптических датчиках.
9. Устройство для инъекции по п. 8, в котором угловое смещение составляет менее половины заданной угловой периодичности.
10. Устройство для инъекции по п. 8 или 9, в котором время смещения изменяется на основе относительной скорости вращения системы поворотного энкодера относительно первого и второго оптических датчиков.
11. Устройство для инъекции по п. 10, в котором время смещения уменьшается в ответ на увеличение относительной скорости вращения.
12. Устройство для инъекции по любому из предыдущих пунктов, дополнительно содержащее кнопку инъекции и электрический переключатель, соединенный с узлом датчиков, при этом электрический переключатель выполнен с возможностью подачи питания на узел датчиков в ответ на нажатие кнопки инъекции.
13. Устройство для инъекции по любому из предыдущих пунктов, дополнительно содержащее картридж, содержащий лекарственный препарат.
14. Модуль, выполненный с возможностью использования с устройством для инъекции, содержащим подвижный компонент программирования дозировки с системой поворотного энкодера, или применения в таком устройстве, в частности в устройстве для инъекции по любому из предыдущих пунктов, при этом модуль содержит:
узел датчиков, содержащий по меньшей мере один оптический датчик, выполненный с возможностью обнаружения перемещения подвижного компонента программирования дозировки устройства для инъекции относительно узла датчиков во время дозирования лекарственного препарата, и коллимирующую оптическую систему, расположенную между по меньшей мере одним оптическим датчиком и подвижным компонентом программирования дозировки; и
процессорное устройство, выполненное с возможностью определения дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения.
15. Модуль по п. 14, в котором коллимирующая оптическая система содержит одно или несколько из следующего: одну или несколько дискретных коллимирующих линз; один или несколько оптических волноводов.
16. Модуль по п. 15, в котором дискретная коллимирующая линза расположена между каждым оптическим датчиком и каждым оптическим волноводом и/или между каждым оптическим волноводом и подвижным компонентом программирования дозировки.
17. Модуль по п. 16, в котором для каждого датчика предусмотрена одна дискретная коллимирующая линза, которая выполнена с возможностью покрытия передающей и/или принимающей частей датчика.
18. Модуль по п. 17, в котором одна дискретная линза представляет собой линзовую решетку, покрывающую датчик, в частности микроформованную линзовую решетку.
19. Модуль по любому из пп. 14-18, в котором один или несколько оптических волноводов имеют форму усеченного конуса, в частности, с круглым или эллиптическим основанием.
20. Способ обработки сигналов, генерируемых узлом датчиков устройства для инъекции по пп. 1-13 или модулем по любому из пп. 14-19, который содержит узел датчиков с двумя оптическими датчиками, расположенными со смещением на 180° таким образом, что сигнал первого датчика из двух датчиков и сигнал второго датчика из двух датчиков находятся в противофазе, при этом способ включает этапы
установки верхнего порога и нижнего порога для сигнала первого датчика и для сигнала второго датчика соответственно и
подсчета единицы дозы, выбранной с помощью подвижного компонента программирования дозировки, если сигнал второго датчика пересекает верхний порог и после этого пересекает нижний порог, а после этого сигнал первого датчика пересекает нижний порог и после этого пересекает верхний порог.
21. Способ по п. 20, в котором этап установки верхнего порога и нижнего порога для сигнала первого датчика и для сигнала второго датчика соответственно включает этап калибровки, выполняемый во время изготовления модуля для установки верхнего и нижнего порогов, при этом этап калибровки включает
обеспечение прохождения набора калибровочной геометрии под каждым датчиком на контролируемых расстояниях для калибровки и
установку верхнего и нижнего порогов таким образом, чтобы верхний порог всегда находился ниже наибольшего уровня соответствующего сигнала датчика, наблюдаемого во время калибровки, а нижний порог всегда находился ниже наименьшего уровня сигнала, наблюдаемого во время калибровки.
22. Способ по п. 21, в котором этап установки верхнего порога и нижнего порога для сигнала первого датчика и для сигнала второго датчика соответственно включает этапы
установки частоты дискретизации для дискретизации сигналов обоих датчиков на более высокий уровень, чем частота дискретизации, используемая для нормальной работы, и дискретизации сигналов во время доставки дозы с помощью устройства для инъекции, содержащего модуль,
определения величин по меньшей мере двух последовательных максимального и минимального значений сигналов каждого датчика и
установки верхнего порога и нижнего порога для каждого сигнала в процентной доли от определенных величин по меньшей мере двух последовательных максимального и минимального значений, если определенные величины по меньшей мере двух последовательных максимального и минимального значений находятся в пределах заданного диапазона допустимых значений сигнала.
23. Способ обработки сигналов, генерируемых узлом датчиков устройства для инъекции по пп. 1-13 или модулем по любому из пп. 14-19, который содержит узел датчиков с двумя оптическими датчиками, расположенными со смещением на 180° таким образом, что сигнал первого датчика из двух датчиков и сигнал второго датчика из двух датчиков находятся в противофазе, при этом способ включает этапы
определения первой точки пересечения, когда уровень сигнала второго датчика становится больше, чем уровень сигнала первого датчика,
определения второй точки пересечения, когда уровень сигнала первого датчика становится больше уровня сигнала второго датчика и
подсчета единицы дозы, выбранной при определении первой точки пересечения после определения второй точки пересечения.
24. Способ по п. 23, в котором определение точки пересечения, когда уровень сигнала одного датчика становится больше, чем уровень сигнала другого датчика, включает определение того, что разность уровней сигналов обоих датчиков превышает заданный порог.
25. Способ по п. 23 или 24, дополнительно включающий этап калибровки, выполняемый во время изготовления модуля, для согласования сигналов обоих датчиков по средней величине сигнала и амплитуде сигнала, причем для калибровки обеспечивают прохождение набора калибровочной геометрии под каждым датчиком на контролируемом расстоянии, и ко второму датчику применяют коэффициенты масштабирования для среднего значения и амплитуды для согласования среднего значения и амплитуды его сигнала со средним значением и амплитудой сигнала первого датчика.
26. Способ по п. 23 или 24, дополнительно включающий этап калибровки, выполняемый после выбора дозы, при этом для калибровки сохраняют набор данных для сигналов обоих датчиков, и из сохраненного набора данных ретроспективно вычисляют коэффициенты масштабирования для получения общего среднего значения и амплитуды сигналов обоих датчиков.
27. Способ обработки сигналов, генерируемых узлом датчиков устройства для инъекции по пп. 1-13 или модулем по любому из пп. 14-19, который содержит узел датчиков с двумя оптическими датчиками, расположенными со смещением на 180° таким образом, что сигнал первого датчика из двух датчиков и сигнал второго датчика из двух датчиков находятся в противофазе, при этом способ включает этапы
определения пиковых значений сигналов первого датчика и второго датчика во время выбора дозы и
подсчета единицы дозы, выбранной, когда пиковое значение сигнала первого датчика было обнаружено после того, как было обнаружено пиковое значение сигнала второго датчика.
28. Устройство для инъекции, содержащее:
систему поворотного энкодера, имеющую заданную угловую периодичность и кольцо энкодера, содержащее множество отражателей света, расположенных по окружности вокруг кольца энкодера в соответствии с заданной периодичностью, причем каждый отражатель света предназначен для полного внутреннего отражения падающего пучка света;
узел датчиков, содержащий излучатель света, выполненный с возможностью излучения пучка света, направленного на отражатель света кольца энкодера, и два приемника света, выполненных с возможностью приема пучка света, отраженного отражателем света кольца энкодера, причем узел датчиков выполнен с возможностью обнаружения перемещения подвижного компонента программирования дозировки относительно узла датчиков во время дозирования лекарственного препарата; и
процессорное устройство, выполненное с возможностью определения
дозировки лекарственного препарата, вводимой устройством для инъекции, на основе указанного обнаруженного перемещения.
29. Устройство для инъекции по п. 28, в котором каждый отражатель света содержит две отражающие поверхности, расположенные перпендикулярно друг другу, так что падающий пучок света отражается от одной отражающей поверхности на другую отражающую поверхность и отражается от другой отражающей поверхности на приемники света.
30. Устройство для инъекции по п. 29, в котором отражатели света выполнены из прозрачного материала, и две отражающие поверхности каждого отражателя света зеркально отполированы с целью отражения света, падающего на отражатель света.
31. Устройство для инъекции по пп. 28, 29 или 30, в котором либо система поворотного энкодера, либо узел датчиков выполнен с возможностью вращения во время дозирования лекарственного препарата.
| RU2015111241 A, 20.10.2016 | |||
| WO2016050902 A1, 07.04.2016 | |||
| WO2014108494 A1, 17.07.2014. |

