Изобретение относится к судостроению, а именно к движителям судов различного назначения.
Из уровня техники известен прямоточный газоводометный движитель по патенту RU 2285636 C2, состоящий из профилированного водозаборного канала с входным и выходным диффузорным отверстием, газоподводящего тракта, цилиндрической вставки в канале, которая расположена за входным диффузором, а также устройства подачи и повышения скорости воздуха (ускорителя), размещенного в корпусе газоподводящего тракта, которое включает в себя, по меньшей мере, два сужающихся сопла, герметично соединенных между собой, при этом каждое сопло коаксиально введено в следующее по ходу движения воздуха сопло с образованием между соплами полости или полостей. Дополнительно, по меньшей мере, одна из указанных полостей снабжена средствами ионизации воздуха, обеспечивающими ионизацию воздуха в полости и его движение в ускорителе с эжекции воздуха из внешней среды через входное отверстие. В результате ионизации молекулы воздуха (азота и кислорода) частично разрушаются с выделением большого количества тепла и кинетической энергии. Недостатками данной конструкции являются низкая эффективность, низкая экологичность, сложность конструкции, при этом ионизация воздуха приводит к выделению тепла, что увеличивает энергозатраты и снижает КПД движителя, а сама конструкция применима только на судах небольшого водоизмещения.
Таким образом задача, решаемая при создании заявленного движителя, состоит в дальнейшем совершенствовании устройств подобного рода, при этом технический результат, достигаемый при решении поставленной задачи, состоит в повышении эффективности работы движителя при одновременном упрощении его конструкции.
Для достижения поставленного результата предлагается движитель водного судна, содержащий воздушный турбокомпрессор, канал воздуховода, вход которого связан с указанным компрессором, канал водозабора, вход которого выполнен с возможностью поступления в канал забортной воды, и камеру стабилизации потока с выходным соплом, выходы каналов воздуховода и водозабора, соответственно, связаны с внутренней полостью камеры стабилизации, выполненной в виде комбинации из трех последовательно сопряженных зон А, В и С, где зона А расположена первой по потоку (воздуха/забортной воды) и имеет форму расширяющегося конуса с входным отверстием с площадью поперечного сечения S1 и выходным отверстием с площадью поперечного сечения S2, зона В имеет форму сужающегося конуса с входным отверстием с площадью поперечного сечения S2 и выходным отверстием с площадью сечения поперечного S3, зона С является соплом и имеет форму расширяющегося конуса с входным отверстием с площадью поперечного сечения S3 и выходным отверстием, а выход канала воздухозабора расположен в зоне С камеры стабилизации.
В вариантах исполнения движителя входное отверстие зоны А может быть сопряжено с выходом канала водозабора; выход канала воздуховода может быть расположен коаксиально внутренней полости камеры стабилизации или выполнен на стенке или стенках камеры стабилизации; движитель дополнительно может содержать средства привода и управления турбокомпрессором, в том числе, средство привода турбокомпрессора выполненное в виде электрического двигателя.
Возможность достижения поставленного результата обусловлена совокупностью расположения выхода канала воздухозабора с одной стороны, и формой внутренней полости камеры стабилизации - с другой.
Так, расположение выхода канала воздухозабора позволяет осуществить подачу воздушного потока практически на срезе камеры стабилизации водного потока, что практически сводит к нулю возможность образования зон обратного течения воды, а поступление воды происходит за счет возникновения зоны разряженного давления в районе сопла. В свою очередь, эмпирически выведенная форма внутренней полости камеры стабилизации, заключающаяся в сочетании зон сужения и расширения, позволяет создавать ламинарный поток без завихрений и смены режима движения жидкости (ламинарный режим подразумевает плавное течение потоков жидкости). В этом случае внутренние слои струи или потока не перемешиваются между собой, в отличие от турбулентного потока, представляющего собой огромное количество разнонаправленных завихрений с постоянным перемешиванием жидкости или газа. Все перечисленное позволяет обеспечить равномерность и стабильность водного потока на всех скоростных режимах работы движителя, что, в совокупности, позволяет минимизировать или практически исключить возникновение нежелательных явлений различного характера, таких, как воздушные пробки, зоны «обратного течения» и т.п., существенно повышая эффективность работы движителя на всех режимах работы.
Дополнительно, отсутствие частей движителя, соприкасающихся с водой, дает ряд дополнительных преимуществ, а именно низкий износ рабочих механизмов, относительную дешевизну и простоту конструкции, низкую энергоемкость (в случае использования электрического привода), возможность обслуживания без извлечения судна из воды (ремонтопригодность), безопасность для морской фауны.
Существо заявленного решения поясняется с использованием следующих графических материалов:
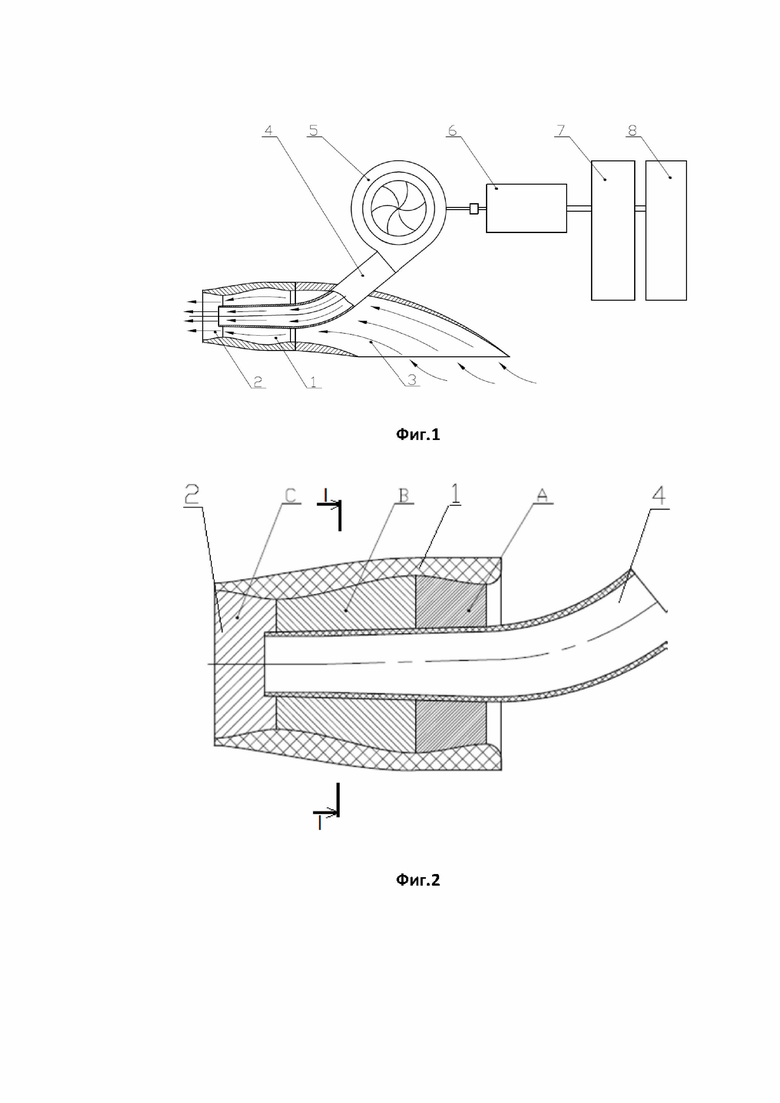
фиг. 1 - принципиальная конструктивная схема движителя;
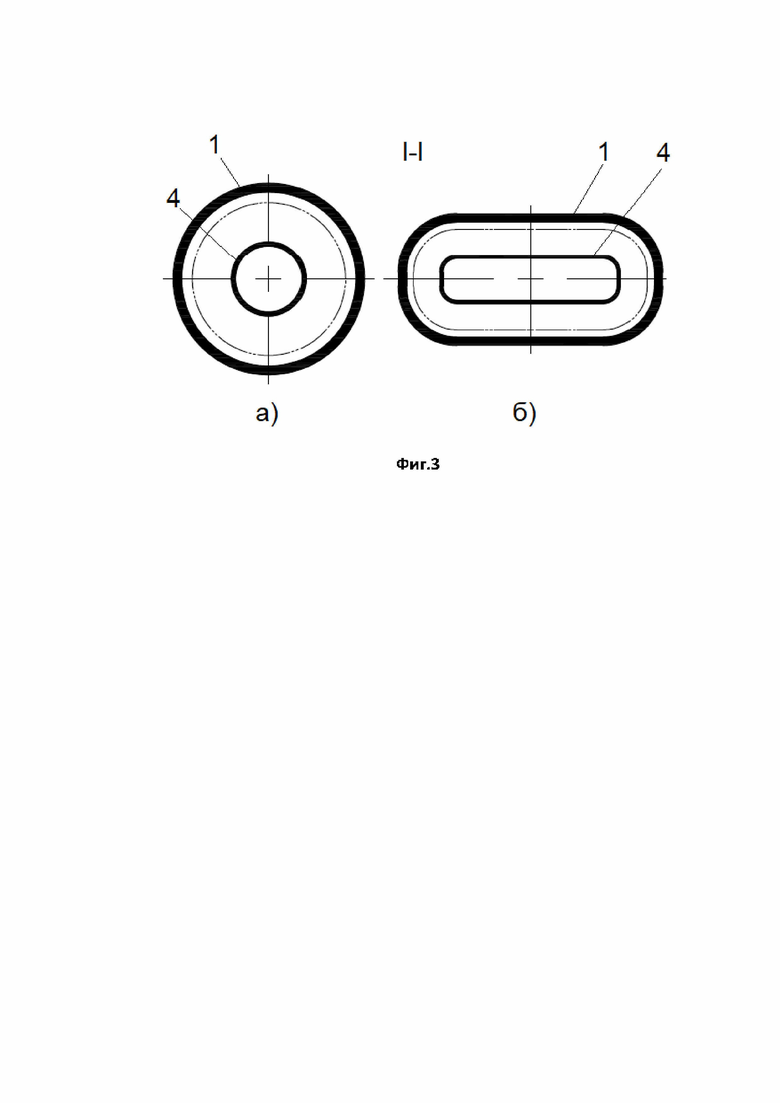
фиг. 2 - принципиальная схема камеры стабилизации воздушного потока;
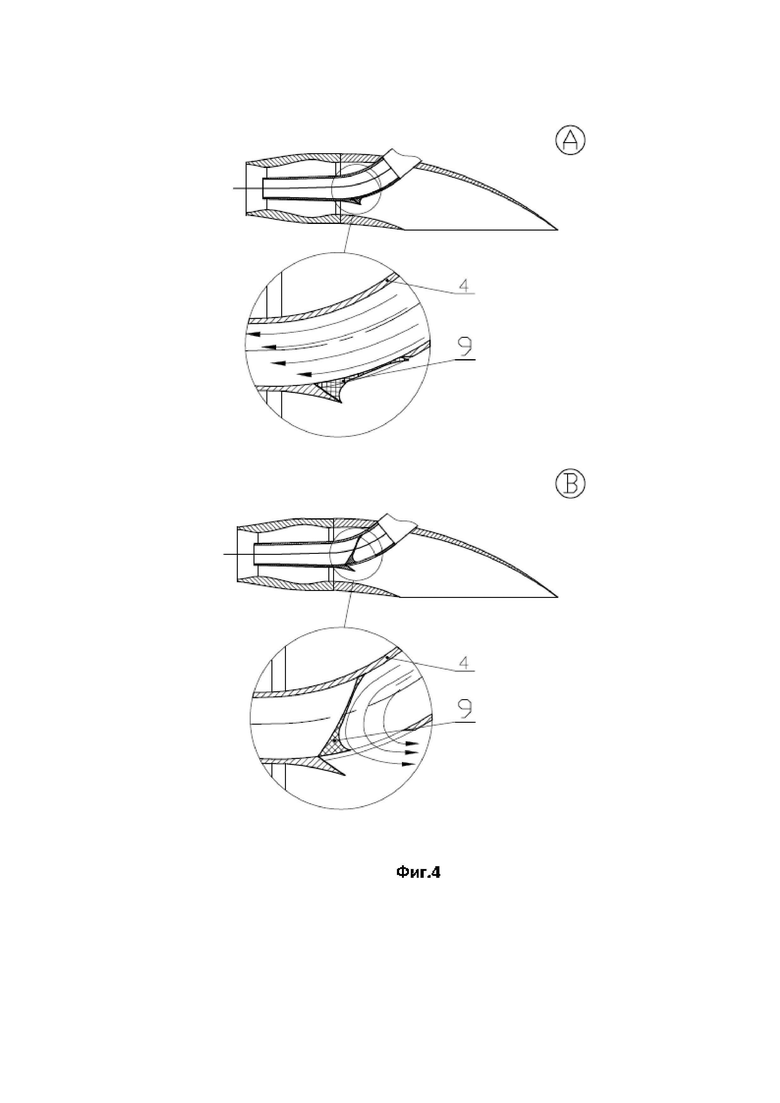
фиг. 3 - варианты сечений I-I согласно фигуре 2;
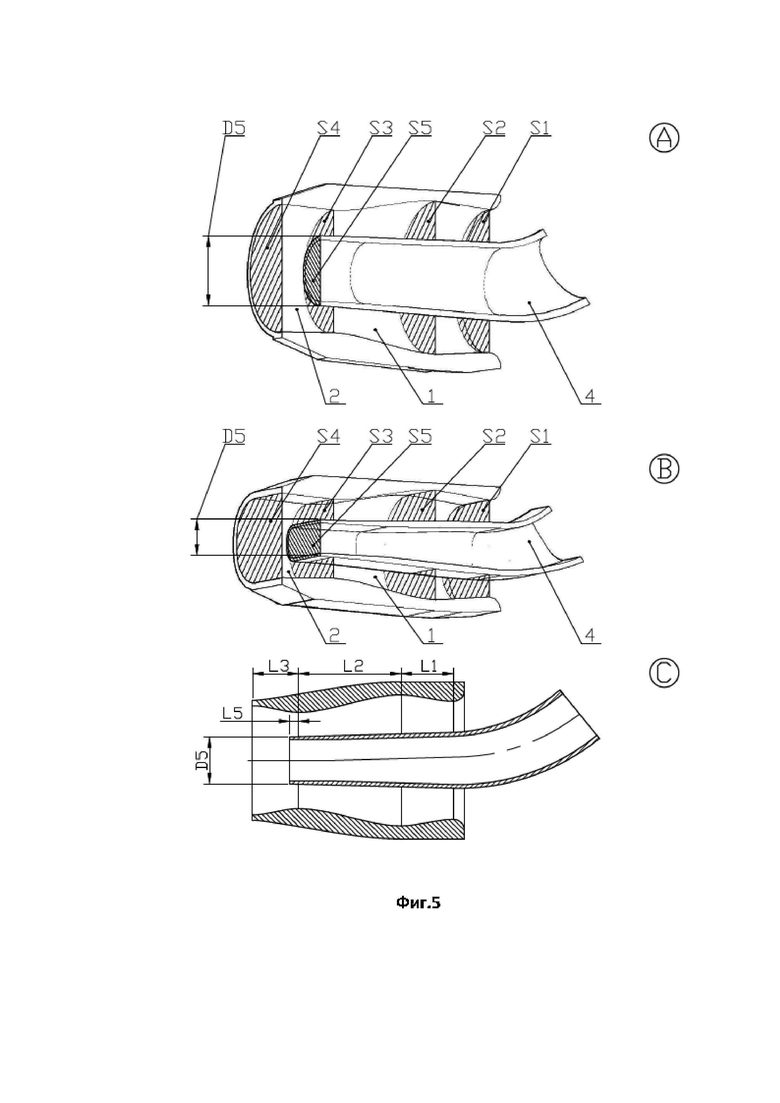
фиг. 4 - схема расположения заслонки в канале воздуховода;
фиг. 5 - пример расчета параметров камеры стабилизации воздушного потока;
фиг. 6 - принципиальные схемы подачи воздушного потока в камеру стабилизации;
фиг. 7 - расположения (глубина) камеры стабилизации водного потока относительно уровня забортной воды;
фиг. 8, 9 - схематичные варианты расположения движителя на судне.
Со ссылкой на Фиг. 1, заявленное устройство принципиальная состоит из воздушного турбокомпрессора (5), который посредством двигателя (6), системы управления (7) и источников питания (8) (например - электрических), по каналу воздуховода (4), подает воздушный поток в камеру стабилизации водного потока (1). Одновременно, в указанную же камеру стабилизации водного потока (1) по каналу водозабора (3) поступает забортная вода, которая смешивается с указанным воздушным потоком и выбрасывается через сопло (2), создавая, тем самым, реактивную струю газо-воздушной смеси (реактивную тягу), направленную в противоположную движению судна сторону. Поступление забортной воды в камеру (1) в исходный момент до начала движения судна (т.е. при выключенном компрессоре) обусловлено расположением входного отверстия канала (3) ниже уровня воды, в следствие чего вода в исходный момент попадает в камеру (1) естественным образом (самотеком). В дальнейшем, при включении компрессора и движении судна, вода через входное отверстие канала (3) набегающим потоком затекает в камеру (1), способствуя реализации рабочего цикла движителя.
Вышеописанное конструктивное исполнение дает возможность обеспечить высокое положение выходного отверстия сопла относительно уровня воды, что, в свою очередь, позволяет снизить необходимое давление воздуха в канале воздуховода и уменьшить мощность компрессора при той же производительности, а скорость движения судна поставить в зависимость только от скорости и объема воздушного потока.
Принципиальная схема камеры стабилизации водного потока (1), являющейся основным конструктивным элементом заявленного движителя, показана на Фиг. 2. Следует отметить, что в данном движителе камера стабилизации водного потока является не рабочей камерой движителя как таковой, а именно камерой стабилизации воздушного и водного потоков. Камера выполнена в виде комбинации из трех последовательно сопряженных зон А, В и С. Зона А расположена первой по потоку воды и имеет форму расширяющегося конуса длинной L1 с входным отверстием с площадью поперечного сечения S1 и выходным отверстием с площадью поперечного сечения S2. Зона В имеет форму сужающегося конуса длинной L2 с входным отверстием с площадью поперечного сечения S2 и выходным отверстием с площадью сечения поперечного S3. Зона С по существу выполняет роль сопла 2 и имеет форму расширяющегося конуса длинной L3 с входным отверстием с площадью поперечного сечения S3 и выходным отверстием с площадью сечения S4. С практической точки зрения переходы (линии сопряжения) между зонами целесообразно выполнить плавными для минимизации срыва рабочей среды. Опционально, камера стабилизации может также содержать дополнительные зоны (от одной и более), расположенные первыми по потоку в сопряжении с входным отверстием зоны А.
На Фиг. 3 схематически показаны варианты форм поперечного сечения камеры стабилизации водного потока (1) и канала воздуховода (4), которые могут быть как круглыми - Фиг. 3а, прямоугольными - Фиг. 3б, так и любых других форм.
Реверс судна, оснащенного движителем заявленной конструкции, осуществляется перенаправлением воздушного потока путем перекрытия канала воздуховода (4) реверсивной заслонкой (9) - Фиг. 4. В штатном режиме заслонка (9) убрана и фактически является частью воздуховода (4) не создавая препятствий движению воздуха - см. Фиг. 4 А. При реверсе судна заслонка (9) перекрывает канал воздуховода (4), перенаправляя воздушный поток в противоположную сторону - см. Фиг. 4 В.
В возможном практическом варианте реализации исходным параметром для определения площадей поперечных сечений S1÷S4 (Фиг. 5 А, В) может является площадь поперечного сечения выходного отверстия канала воздуховода (4) S5. Исходя из этого параметра остальные площади поперечных сечений определяются умножением S5 на эмпирически выведенный коэффициент сечения Кs, например:
для сечения S1 коэффициент Кs1 = 2,7, тогда S1 = S5 х Кs1 ±10%;
для сечения S2 коэффициент Кs2 = 3,7, тогда S2 = S5 х Кs2 ±10%;
для сечения S3 коэффициент Кs3 = 2,0, тогда S3 = S5 х Кs3 ±10%;
для сечения S4 коэффициент Кs4 = 3,5, тогда S4 = S5 х Кs4 ±10%.
Аналогично, исходным параметром для определения линейных размеров L1÷L3 камеры стабилизации водного потока (1) может являться диаметр (высота) выходного отверстия канала воздуховода (4) D5 (Фиг. 5 С), где численные значения L1÷L3 определяются эмпирически через эмпирически же выведенный коэффициент К, например:
для размера L1 коэффициент КL1 = 4, тогда L1 = (D5-D5/4) х КL1 ±10%;
для размера L2 коэффициент КL2 = 7.5, тогда L2 = (D5-D5/4) х КL2 ±10%;
для размера L3 коэффициент КL3 = 3.8. L3= (D5-D5/4) х КL3 ±10%.
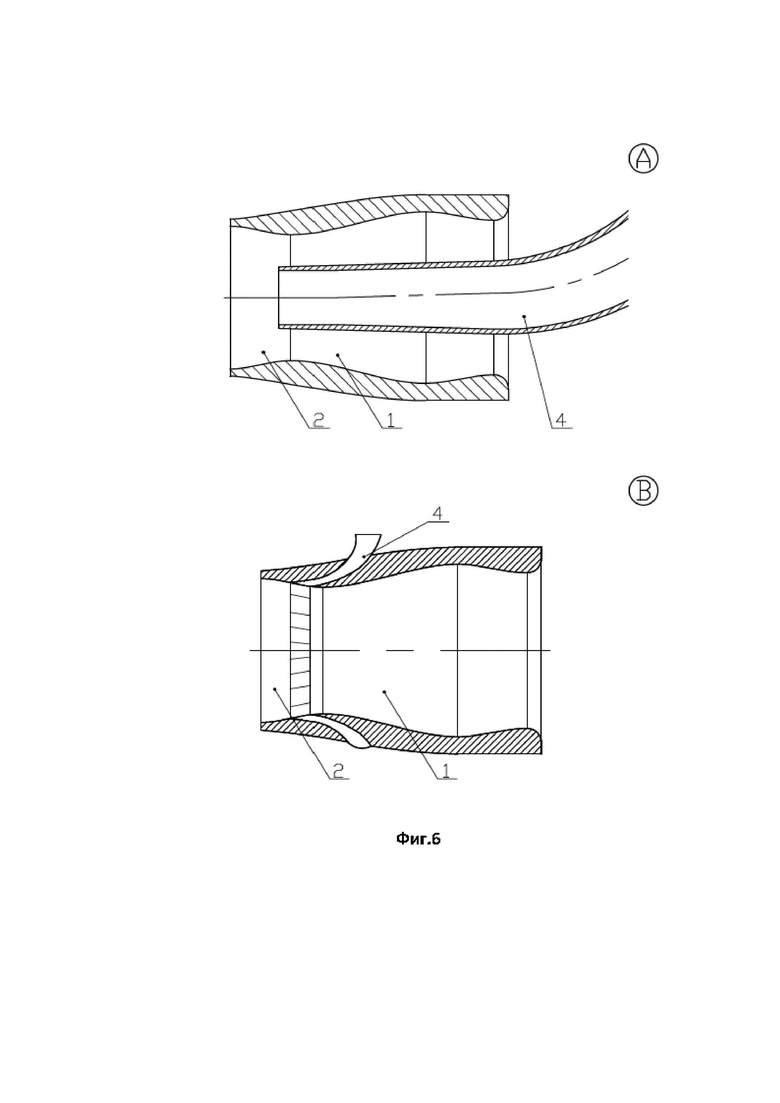
На Фиг. 6 показаны принципиально возможные конструктивные варианты схем подачи воздушного потока в камеру стабилизации водного потока (1):
- подача воздушного потока в центр камеры стабилизации - Фиг. 6 А;
- подача воздушного потока по периферии камеры стабилизации - Фиг. 6 В.
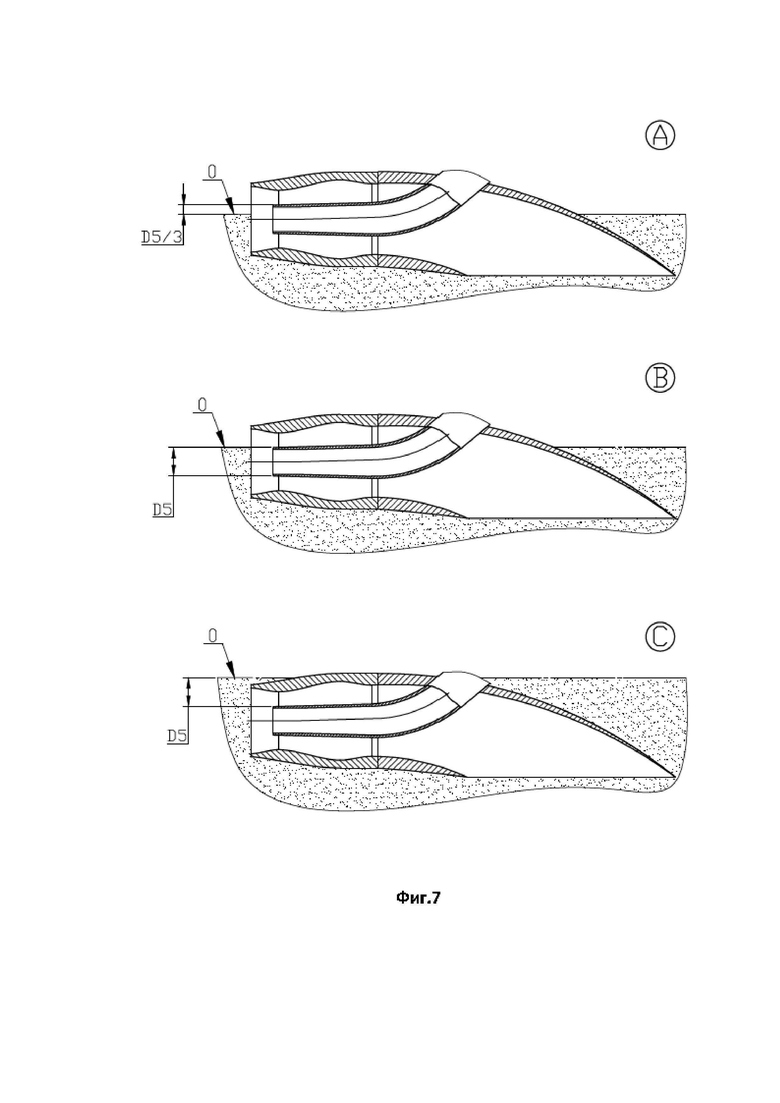
Со ссылкой на Фиг. 7 В оптимальной с точки зрения максимизации достигаемого положительного эффекта является такое расположение движителя, при котором верхняя кромка выходного отверстия канала воздуховода (4) расположена на одном уровне с уровнем воды. В свою очередь, принимая уровень воды за "0", верхняя кромка выходного отверстия канала воздуховода (4) может располагаться как выше такого уровня в диапазоне от "0" до приблизительно D5/3 - Фиг. 7 А, так и ниже уровня воды в диапазоне от "0 "до D5 - Фиг. 7 С.
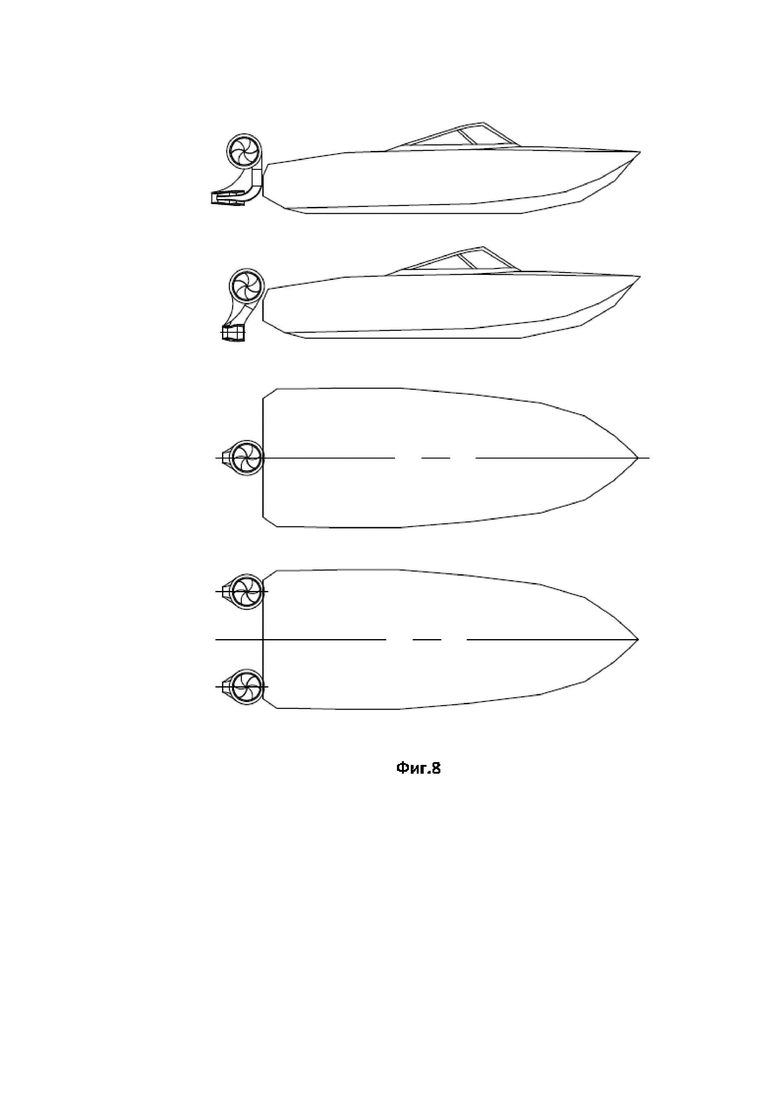
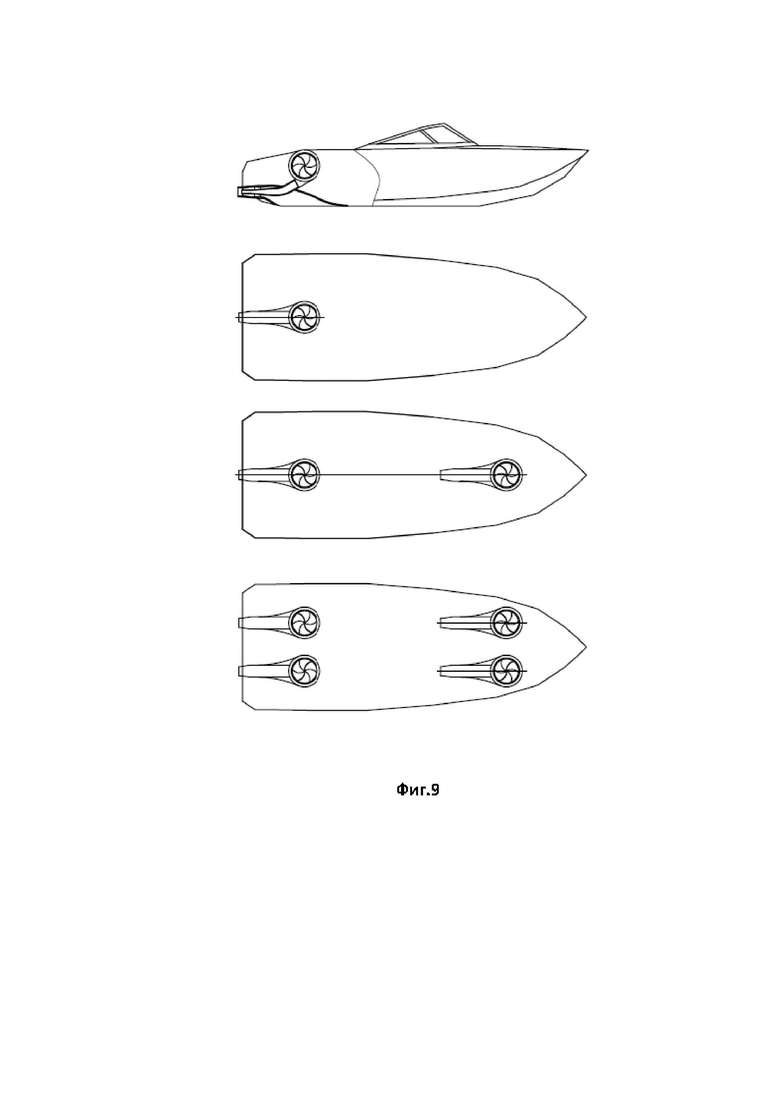
Заявленный движитель может использоваться как в качестве навесного мотора - Фиг. 8, и устанавливаться на корме судна, так и в качестве встраиваемого в корпус судна мотора - Фиг. 9, и устанавливаться как на корме, так и/или в центральной и/или в носовой частях судна. Количество движителей независимо от схемы установки может быть различным (один или более), а, в варианте согласно Фиг. 9, предусматривает также возможность и последовательной установки. Во всех случаях установки принципиальным, однако, является то, что входное отверстие канала водозабора должно находится ниже уровня забортной воды (см. выше).
Таким образом, изобретение позволяет существенно упростить конструкцию известных прямоточных газоводометных движителей, снизить конструктивные размеры, повысить экологичность данного движителя, увеличить срок службы за счет отсутствия вращающихся деталей в водозаборном канале по всей длине, а также предопределить возможность создания подобных движителей разной мощности, под разные задачи, без существенных финансовых и конструкторских затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ нагнетания давления текучей среды | 2016 |
|
RU2617614C1 |
| СИСТЕМА АКТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2440277C2 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2015 |
|
RU2597715C1 |
| Судно на подводном крыле | 2021 |
|
RU2770253C1 |
| ТРАНСЗВУКОВОЙ ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ СУДНА | 2013 |
|
RU2534155C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ СУДНА | 2007 |
|
RU2345926C2 |
| ВИХРЕВОЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2013308C1 |
| БЫСТРОХОДНОЕ СУДНО НА ВОЗДУШНОЙ КАВЕРНЕ | 2019 |
|
RU2714040C1 |
| СТРУЙНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2003 |
|
RU2254281C1 |
| ГИДРОРЕАКТИВНОЕ УСТРОЙСТВО | 2008 |
|
RU2362045C1 |
Изобретение относится к судостроению, а именно к движителям судов различного назначения. Движитель содержит воздушный турбокомпрессор с каналом воздухозабора, канал водозабора, вход которого выполнен с возможностью поступления в канал забортной воды, и камеру стабилизации потока с выходным соплом. Каналы воздухозабора и водозабора связаны с внутренней полостью камеры стабилизации, выполненной в виде комбинации сужающихся и расширяющихся поверхностей. Выход канала воздухозабора расположен в сопле камеры стабилизации. Достигается повышение эффективности работы движителя при одновременном упрощении его конструкции. 5 з.п. ф-лы, 9 ил.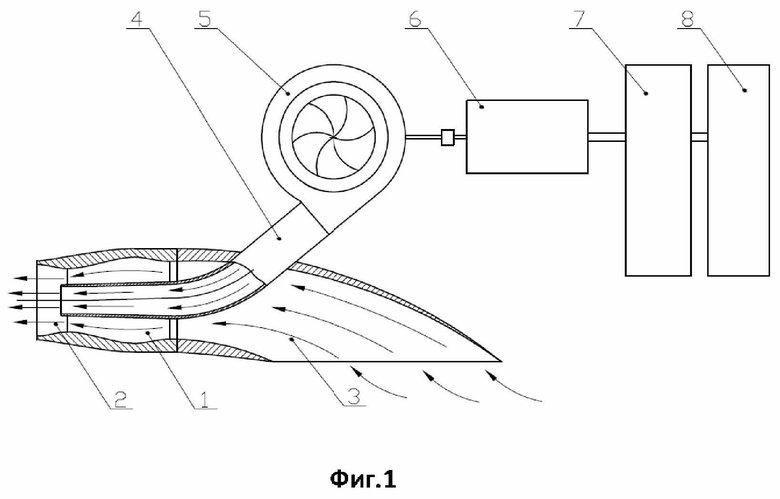
1. Движитель водного судна, содержащий воздушный турбокомпрессор, канал воздуховода, вход которого связан с указанным компрессором, канал водозабора, вход которого выполнен с возможностью поступления в канал забортной воды, и камеру стабилизации потока с выходным соплом, выходы каналов воздуховода и водозабора, соответственно, связаны с внутренней полостью камеры стабилизации, выполненной в виде комбинации из трех последовательно сопряженных зон А, В и С, где зона А расположена первой по потоку и имеет форму расширяющегося конуса с входным отверстием с площадью поперечного сечения S1 и выходным отверстием с площадью поперечного сечения S2, зона В имеет форму сужающегося конуса с входным отверстием с площадью поперечного сечения S2 и выходным отверстием с площадью сечения поперечного S3, зона С является соплом и имеет форму расширяющегося конуса с входным отверстием с площадью поперечного сечения S3 и выходным отверстием, а выход канала воздухозабора расположен в зоне С камеры стабилизации.
2. Движитель по п. 1, в котором входное отверстие зоны А сопряжено с выходом канала водозабора.
3. Движитель по п. 1 или 2, в котором выход канала воздуховода расположен коаксиально внутренней полости камеры стабилизации.
4. Движитель по п. 1 или 2, в котором выход канала воздуховода выполнен на стенке или стенках камеры стабилизации.
5. Движитель по любому из пп. 1-4, дополнительно содержащий средства привода и управления турбокомпрессором.
6. Движитель по п. 5, в котором средство привода турбокомпрессора выполнено в виде электрического двигателя.
| ПРЯМОТОЧНЫЙ ГАЗОВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2285636C2 |
| Вяжущее для дорожного строительства | 1986 |
|
SU1375601A1 |
| US 3808804 A1, 07.05.1974 | |||
| СПОСОБ БОРЬБЫ С ГРИБНЫМИ ЗАБОЛЕВАНИЯМИРАСТЕНИЙ | 0 |
|
SU186807A1 |

