Область техники
Предлагаемое изобретение относится к области, применяемых преимущественно в медицине и косметологии профилирующих лечебно-коррекционных средств и средств оздоровительно-гигиенического и/или физиотерапевтического назначения, позволяющих, в том числе, производить терапевтические манипуляции, связанные с проведением механического воздействия на различные участки поверхности тела человека, в целях оказания комплексного массажного эффекта на определенные мышечные группы, кожный покров и подкожно-жировые ткани.
Уровень техники
Из уровня техники известен массажный манипулятор (см. RU105587, кл. A61H7/00, опубл. 2011 г. [1]).
Известное техническое решение [1] относится к робототехническим устройствам для проведения массажной физиотерапии, а именно производящихся в автоматическом контролируем режиме процедур лечебного массажа и мануальной терапии.
Конструкция рассматриваемого массажного манипулятора ориентирована на обеспечение безопасности пациента в случае возможного сбоя системы управления электромеханическими приводами робота.
Известный робот манипулятор имеет систему управления с подключенным к ней, посредством гибкого соединения, массажным инструментом, который непосредственно воздействует на пользователя.
В соответствии с конструктивными особенностями и изобретательским замыслом технического решения [1] система управления имеет робототехническую структуру, заключенную в корпус, установленный на основании, при этом управление массажным инструментом осуществляется контролируемым гибким соединением в виде активного манипулятора, имеющего антропоморфные звенья, часть из которых выполнена из упругого материала и имеет возможность прогиба во всех направлениях.
Следует отметить, что активный манипулятор соединен с датчиком избыточного давления, а также с внешней средой посредством регулируемого выпускного клапана.
Работа массажного инструмента под управлением контролируемого гибкого манипулятора проходит в автоматическом режиме и имеет повышенные показатели эффективности за счет улучшенной эргономики использования, проявляющейся в расширенных возможностях доступа и к правильному анатомическому охвату областей, подвергаемых массажному воздействию.
Но вместе с тем, необходимо отметить, что работа известного массажного манипулятора может быть нестабильной, и как отмечено в описании [1] могут наблюдаться сбои системы управления электромеханическими приводами робота, что связано с определенными рисками получения опасных для здоровья пациента воздействий, в виде повышенного давления со стороны массажного инструмента.
Необходимо учесть, что в соответствии с описанием решения [1], робот-массажер имеет надежную степень защиты от последствий сбоя системы управления, однако, имеющееся средство безопасности неизбежно приводит к остановке работы устройства, в частности, в результате аварийного прогиба предплечья робота, что в свою очередь потребует значимого количества времени на перенастройку оборудования и возможно замену поврежденных частей.
Кроме сказанного, следует учитывать, что подобные случаи аварийной эксплуатации, связанные со сбоем программного обеспечения или аппаратными ошибками системы, способны провоцировать беспокойство и недоверие у пользователей, и как следствие чувство незащищенности и опасности за свое здоровье перед неконтролируемой человеком автоматической массажной машиной, которая ввиду особенностей эксплуатации, имеет непосредственно тактильный контакт с пользователем, и как следствие теоретически способно нанести травму и причинить ущерб. Также названное изделие не позволяет говорить о прогнозированной результативности процедур.
Наиболее близким в отношении технической сущности к заявляемому изобретению является автоматическая лечебно-профилактическая система физиотерапевтического действия (см. WO2020148624, кл. A61H15/00, опубл. 2020г. [2]).
Данная автоматическая система относится к средствам реабилитации и используется в области эстетической и спортивной медицины, в частности, подходит для лечения, посредством массажной компрессионной микровибрации, различных недугов, таких как целлюлит, лимфатический и венозный застой, головные боли, боли в спине, пояснице, шеи и др.
В основе известной системы [2] применяется метод компрессионной микровибрации, адаптированный к расстройствам, которым в той или иной степени подвержены любые пациенты, при этом обеспечивается воздействие на сосудистую систему в виде микроциркуляции, на лимфатическую систему, а также кожные ткани, что в свою очередь оказывает положительное действие на поддержание мышечных групп в активном тонусе.
Рассматриваемая система [2] для физиотерапевтического воздействия на тело человека состоит из управляющего блока и ручного массажного рабочего органа с помощью, которого осуществляются массажные манипуляции, блок управления имеет программное обеспечение, которое определяет оптимальную терапию для конкретного случая, а ручной массажный рабочий орган выполнен в виде массажного средства и снабжен вращающимися роликовыми элементами, при соприкосновении с которыми проявляется массажный эффект.
Согласно известной массажной технологии [2] управляющий блок имеет в своем составе специальное программное обеспечение и определяет с помощью него наилучшую терапию для каждого конкретного пациента.
Выбор наилучшего метода оздоровления основывается на том, что контактирующие с поверхностью кожи пациента массажные элементы массажного средства, а именно элемент для ударной обработки тела, элемент для проведения микровибрации и элемент для компрессионной обработки тела содержат специальные датчики, передающие после краткосрочной обработки обнаруженные данные о состоянии кожи в управляющий блок, который в свою очередь воздействует (корректирует) параметры работы массажного средства (массажных роликов) принимая во внимание полученные данные о механической прочности кожного покрова.
Из недостатков известной системы [2] целесообразно отметить, следующие.
Программное обеспечение, обрабатывающее поступающие сигналы от датчиков, способно вырабатывать оптимальную методику оздоровления только после первичного разведывательного массажного действия, которое производится интуитивно и весьма ориентировочно без первичного обследования пользователей, что с высокой степенью вероятности может сопровождаться получением микротравм, а также более крупных повреждений, способных поставить под сомнение эффективность и целесообразность проведения дальнейшего терапевтического воздействия.
Исполнительный массажный элемент имеет весьма узкую область массажного контакта, поскольку в конструкции используется не более пяти рядов сферических элементов, кроме того, габариты массажного роллера небольшие, что в совокупности не обеспечивает унифицированности применения и не обеспечивает эффективной массажной проработки поверхности тел пользователей.
Дополнительным и объективным недостатком известной конструкции следует считать то, что применяемый для работы массажного элемента двигатель имеет недостаточную мощность для возможности поддержания необходимого крутящего момента на его верхнем пороге, что не гарантирует эффективность работы с высокой степенью нажатия.
Раскрытие изобретения
Технической проблемой предлагаемого изобретения является создание интеллектуальной и обладающей высокими технико-эксплуатационными показателями, полуавтоматической машины для профессионального проведения ряда комплексных лечебно-коррекционных мероприятий оздоровительно-гигиенического и/или физиотерапевтического назначения, проявляющегося в тактильных, преимущественно массажных манипуляциях, производимых на участках тела пациентов.
Техническим результатом предлагаемого изобретения является реализация указанного назначения по созданию интеллектуальной программируемой системы по контролируемому проведению технически разноплановых массажных операций, в том числе их возможных сочетаний, что сопровождается повышенными показателями безопасности и эффективности производимых оздоровительно-гигиенических и/или физиотерапевтических процедур, точность выбора которых обусловлена наличием возможности заблаговременного установления вида и особенностей массажного воздействия с учетом индивидуальных особенностей каждого пациента в отдельности.
Заданный технический результат, решающий обозначенную техническую проблему, достигается в результате того, что автоматизированная система для процедурного физиологического воздействия на различные участки поверхности тела пользователя с целью проведения комплексной коррекционно-профилактической терапии, заключается в механическом массажном вмешательстве и состоит из интеллектуального модуля управления и рабочего органа, указанный интеллектуальный модуль управления содержит объединенные электрическими узловыми соединениями аппаратные компоненты в составе, которых программируемый процессорный блок и органы управления, позволяющие выбирать режимы работы системы и управлять массажной нагрузкой, указанный рабочий орган выполнен перемещаемым в виде отдельного корпусного функционального модуля, связанного с интеллектуальным модулем управления, и содержащего исполнительное массажное средство, электродвигатель, редуктор, средство измерения скорости вращения электродвигателя, а также средство измерения электрического тока, потребляемого указанным электродвигателем, упомянутый корпусной модуль имеет рабочий проем, а исполнительное массажное средство через редуктор соединено с электродвигателем, при этом исполнительное массажное средство имеет форму полой втулки, с расположенными на ее внешней поверхности массажными элементами, имеющими скругленную форму, установленными на осях с возможностью вращения, причем упомянутые массажные элементы частично выступают за пределы корпуса модуля через его рабочий проем и создают при работе контролируемую ритмичную нагрузку в отношении обрабатываемой области, проявляющуюся в виде виброкомпрессии и микровибрации адаптивно настраиваемой частоты, происходящих в периодах одномоментного контактирования с поверхностью соответствующего участка тела пользователя нескольких, находящихся во взаимном вращении массажных элементов.
По одному из частных вариантов исполнения система содержит средство измерения температуры внутри корпусного функционального модуля.
Согласно наилучшему варианту исполнения изобретения рабочий орган может содержать электронную плату управления и элементы управления, позволяющие управлять массажной нагрузкой.
По наиболее предпочтительному варианту осуществления изобретения процессорный блок имеет программируемую архитектуру системного обеспечения, имеющего возможность принятия и обработки контрольных сигналов, исходящих от средства измерения рабочего органа при оказании силового воздействия, обеспечивая в режиме реального времени, распознавание и информационное предупреждение о недостаточной или избыточной силовой массажной нагрузки на тело пользователя, допустимые особенности физиологии которого определены и учтены в работе программного функционала.
По одному из допустимых вариантов эксплуатации предлагаемого изобретения интеллектуальный модуль управления и рабочий орган связаны друг с другом посредством гибкого соединения или путем беспроводной связи.
Является целесообразным, если корпус интеллектуального модуля управления выполнен металлическим или пластиковым.
Корпус интеллектуального модуля управления может быть снабжен элементом крепления для удерживания рабочего органа в неэксплуатируемом положении.
По одному из частных вариантов реализации изобретения, вращающиеся массажные элементы исполнительного массажного средства плотно уложены в двенадцатирядную структуру, облегающую внешнюю поверхность втулки, при этом часть массажных элементов может иметь твердость по Шору (А) от 60 до 80 ед.
Конструкцией допустимо, если интеллектуальный модуль управления имеет колесные средства перемещения, оснащенные стопорным механизмом.
По одному из возможных вариантов исполнения изобретения рабочий орган оснащается светодиодным элементом светового потока красного спектра излучения для дополнительного стимулирования коллагеновых волокон кожи путем светотерапии (фототерапии).
Является наиболее предпочтительным, если массажные элементы выполняются из силикона или по структуре схожего с резиной материала и имеют внутри несимметричный элемент, противодействующий прокручиванию.
В неэксплуатируемом положении исполнительное массажное средство, как правило, помещается в цилиндрический съемный корпус, предназначенный для сбора остаточного массажного масла.
Часть массажных элементов диаметром от 10 до 25 мм могут иметь сходные плоскости вращения и углы качения относительно друг друга.
По одном из предпочтительных вариантов исполнения изобретения массажные элементы укладываются с зазором относительно рабочей поверхности втулки.
Корпус рабочего органа может быть снабжен крышкой.
Является наиболее предпочтительным, если электродвигатель исполнительного массажного средства располагается внутри втулки по одной оси.
При установке в рабочий орган втулка одним из торцов может быть закреплена на редукторе с обеспечением механического зацепления.
По одной из версий исполнения изобретения рабочий орган содержит подключенный к электронной плате управления индикатор в виде дисплея, отображающего уровень массажной нагрузки.
Как правило, интеллектуальный модуль управления содержит дисплей, отображающий параметры массажной нагрузки.
Согласно частному варианту реализации изобретения, может производиться отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее в случае, если среднее значение потребляемого тока в течение заданного времени превышает пороговое значение.
Согласно частному варианту реализации изобретения, может производиться отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее в случае, если пиковое значение потребляемого тока превышает пороговое значение.
Согласно частному варианту реализации изобретения, может производиться поддержание заданной скорости вращения исполнительного массажного средства, а при невозможности ее поддержания обеспечивается отключение электродвигателя и индикация, соответствующей ошибки на дисплее.
Согласно частному варианту реализации изобретения, может производиться отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее, в случае если произошла непредусмотренная остановка вращения исполнительного массажного средства.
Согласно частному варианту реализации изобретения, может производиться отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее, в случае, когда температура электродвигателя превышает пороговое значение.
Наилучший вариант исполнения изобретения подразумевает, что втулка массажного средства выполнена перфорированной.
Массажные элементы могут выполняться сферическими и крепиться на оси, проходящей через их центр, кроме того, массажные элементы могут крепиться на оси с использованием подшипника скольжения из полиоксиметилена, полиамида, полипропилена или фторопласта.
Рассматриваемый профессиональный массажный комплекс работает, как правило, в полуавтоматическом пользовательском режиме, преимущественно под контролем врача или опытного специалиста, специализирующегося на оздоровительно-гигиенических и/или физиотерапевтических процедурах, в частности, с использованием оборудования, предназначенного для проведения массажных мероприятий.
Программное обеспечение системного управляющего блока адаптировано для регистрации опознавательной информации на основании, которой принимаются решения о ходе дальнейшего массажного вмешательства. При этом поступающие от средств измерения рабочего органа контрольные сигналы, учитываются системой и обрабатываются для принятия решений, в том числе с учетом заложенного программного функционала, в частности, охватывающего предельные физиологические показатели пользователей различных возрастных групп, в результате чего наглядно демонстрируется результат, к примеру, незначительного или избыточного силового воздействия в области человеческого тела.
Проводимые массажные процедуры могут производиться и регулироваться в ручном и автоматических режимах, при этом используется исполнительное массажное средство, преимущественно механического действия с использованием роликовых механизмов, функциональность и технические возможности, которых позволяют проводить массажные процедуры получая высокоэффективный оздоровительный и коррекционно-лечебный расслабляющий эффект, получаемый, в частности, в результате возникновения виброкомпрессии и микропульсации, в частности, особенности возникновения которых и определяются настоящим изобретением.
Таким образом, указанные технические особенности предлагаемого изобретения, являются существенными, и как следствие необходимыми для решения задач, заключающихся в создании интеллектуальной, в частности, способной к распознаванию недостаточной либо избыточной массажной нагрузки терапевтической массажной системе, обладающей высокой производительностью и унифицирующими показателями при эксплуатации.
Как следует из описания основные задействованные эксплуатационные единицы (интеллектуальный модуль управления и рабочий орган) технически связаны между собой и обеспечивают возможность оказания комплексного оздоровительно-гигиенического и/или физиотерапевтического действия, что в конструкторском понимании предопределяет назначение объекта и причисляет его профессиональным машинам для производства терапевтических манипуляций, сопряженных с проведением механического воздействия на различные участки поверхности тела человека.
Кроме того, как уже было указано выше возможность интеллектуального анализа поступающей информации и выбора в связи с этим корректных режимов массажной терапии с определенными уникальными особенностями и режимами работы, призванными сопровождать и корректировать предлагаемую массажную терапию, основывается на том, что программируемое аппаратное обеспечение интеллектуального модуля управления, содержащего объединенные электрическими узловыми соединениями аппаратные компоненты, в составе, которых программируемый процессорный блок и органы управления, позволяющие выбирать режимы работы системы и управлять массажной нагрузкой, имеет возможность принятия и обработки контрольных сигналов, исходящих от средств измерения рабочего органа, что позволяет автоматически в безопасном режиме контролировать ведение рабочего процесса, в том числе обеспечивать в режиме реального времени, распознавание и информационное предупреждение о недостаточной или избыточной силовой массажной нагрузки на тело пользователя, допустимые особенности физиологии которого заранее определены и учтены в работе программного функционала.
Возможности сочетания разновидностей массажных манипуляций, сопровождающихся безопасностью и эффективностью их применения реализуются за счет того, что массажный инструмент (рабочий орган) выполнен в виде отдельного функционального модуля, связанного с интеллектуальным модулем управления, и содержащим электронную плату управления, редуктор и исполнительное массажное средство с электродвигателем, причем упомянутый корпус имеет рабочий проем, редуктор соединен с электродвигателем, а электронная плата управления содержит средство измерения температуры внутри корпуса, средство измерения скорости вращения электродвигателя, средство измерения электрического тока, потребляемого электродвигателем и элементы управления, позволяющие управлять массажной нагрузкой, при этом исполнительное массажное средство имеет форму втулки, с расположенными на ее внешней поверхности массажными элементами, имеющими скругленную форму, установленными на осях с возможностью вращения, причем упомянутые массажные элементы частично выступают за пределы корпуса модуля через его рабочий проем и создают при работе контролируемую ритмичную нагрузку в отношении обрабатываемой области, проявляющуюся в виде виброкомпрессии и микровибрации адаптивно настраиваемой частоты, происходящих в периодах одномоментного контактирования с поверхностью соответствующего участка тела пользователя нескольких, находящихся во взаимном вращении массажных элементов.
Таким образом, представленное выше конструкторское выполнение заявляемой автоматизированной системы для процедурного терапевтического воздействия на определенные участки поверхности человеческого тела, с учетом ее характеристик и технических особенностей, образует совокупность признаков достаточных для достижения заданного технического результата, заключающегося в реализации назначения по созданию интеллектуальной программируемой системы по контролируемому проведению разноплановых массажных операций, в том числе их возможных сочетаний, что сопровождается повышенными показателями безопасности и эффективности производимых физиотерапевтических процедур, точность выбора которых обусловлена наличием возможности определения качества и особенностей массажного воздействия с учетом индивидуальных особенностей каждого пациента в отдельности, а также для решения обозначенной технической проблемы по созданию интеллектуальной и обладающей высокими технико-эксплуатационными показателями, полуавтоматической машины для профессионального проведения ряда комплексных лечебно-коррекционных мероприятий физиотерапевтического назначения, проявляющегося в тактильных, преимущественно массажных манипуляциях, производимых на участках тела пациентов.
Следует также отметить, что рассматриваемая система физиологического воздействия может служить основой или частью для создания полностью автоматического, преимущественно роботизированного массажного комплекса.
Краткое описание чертежей
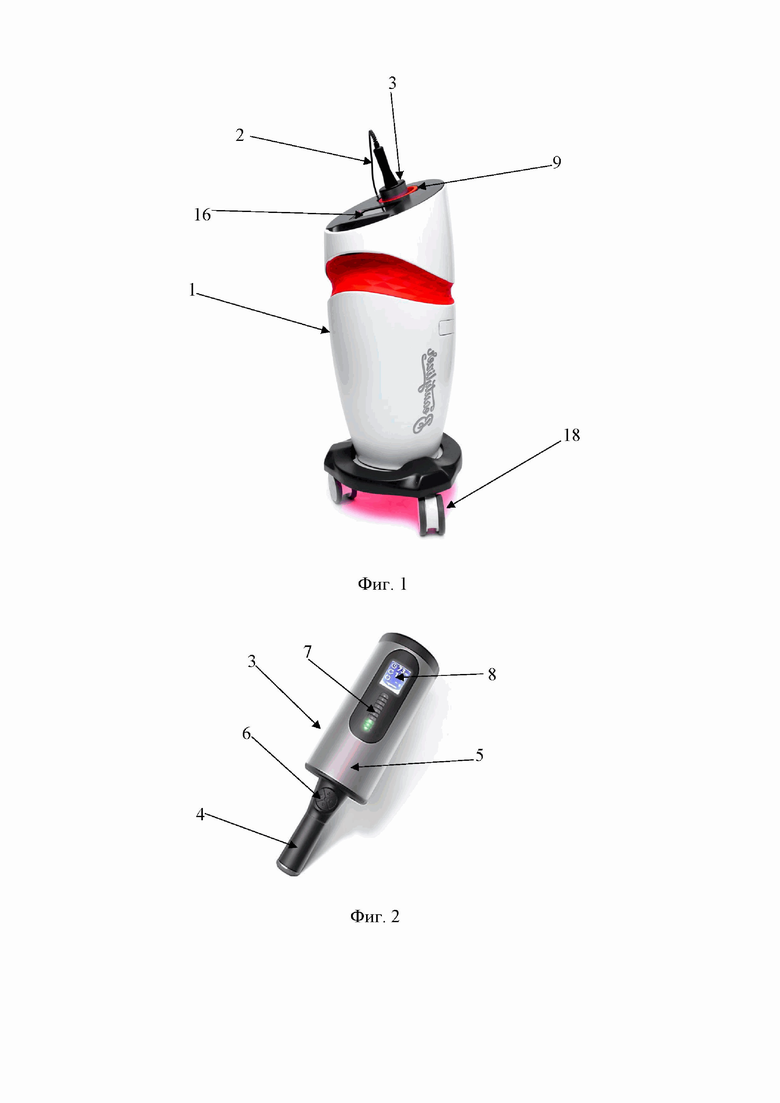
На фиг. 1 представлен общий вид предлагаемой автоматизированной системы для процедурного физиотерапевтического воздействия;
На фиг. 2 представлен предпочтительный вариант исполнения рабочего органа оздоровительного назначения;
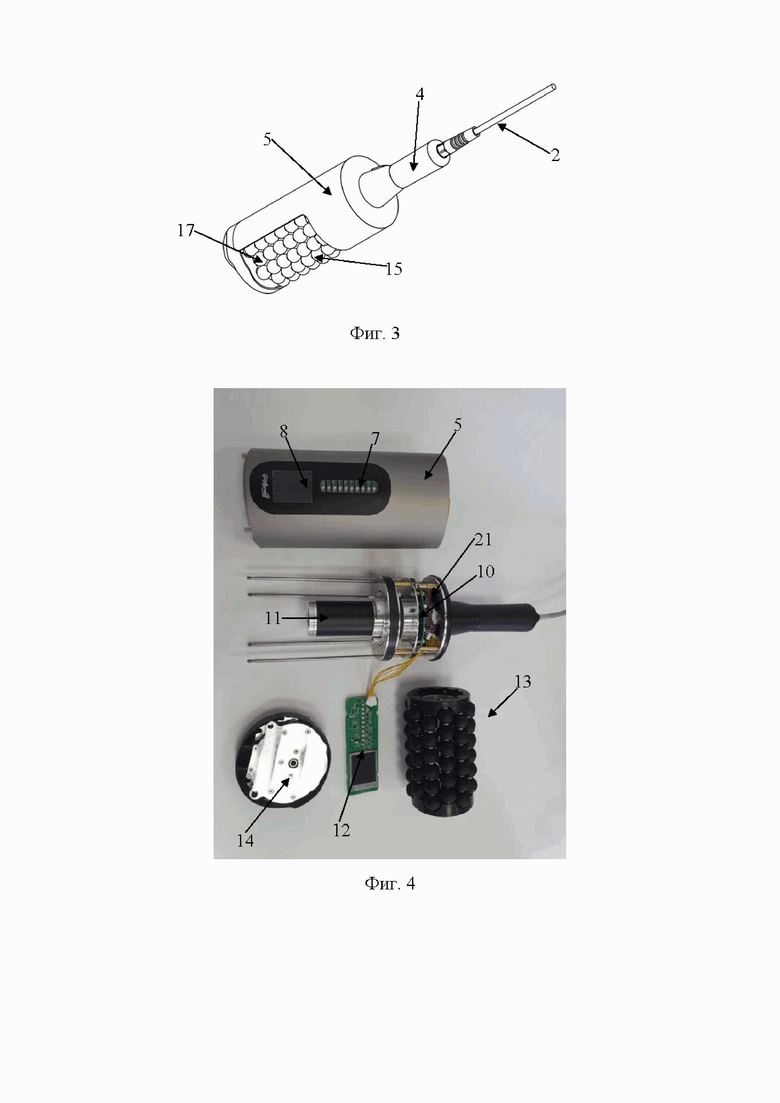
На фиг. 3 схематично представлена конструкция рабочего органа оздоровительного назначения;
На фиг. 4 представлены составные элементы рабочего органа в разобранном положении;
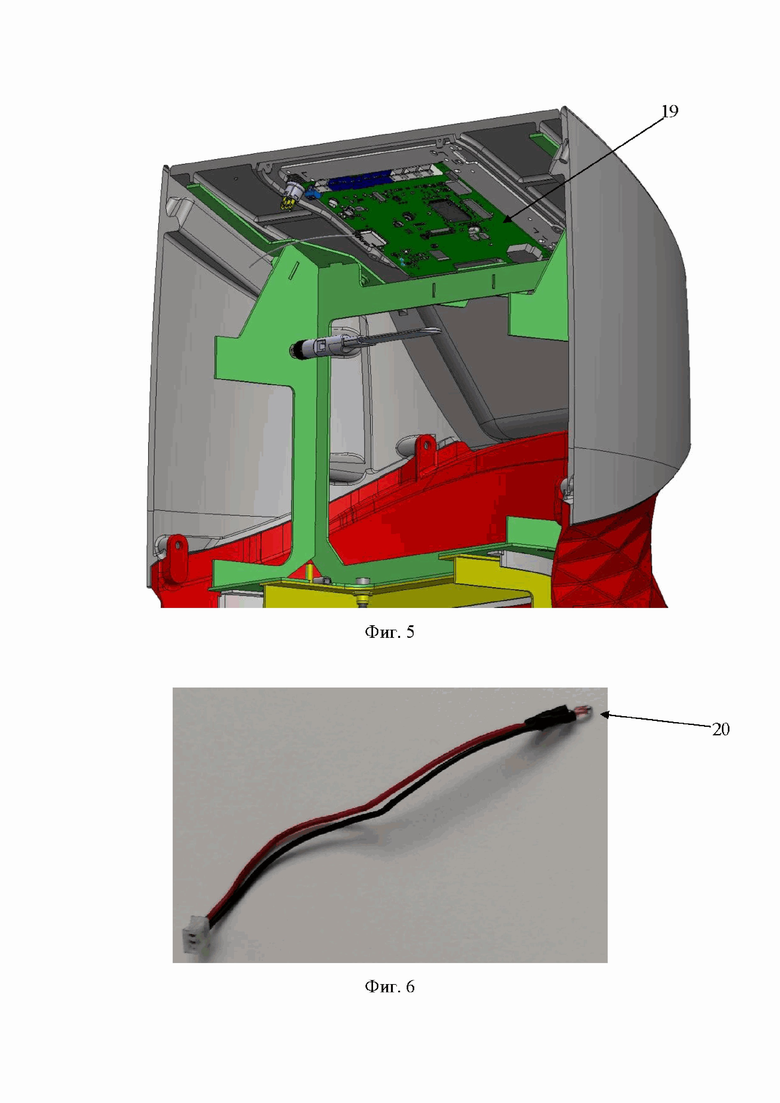
На фиг. 5 представлен интеллектуальный модуль управления в разрезе;
На фиг. 6 представлен датчик температуры.
Осуществление изобретения
Предлагаемое изобретение поясняется конкретным примером выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение существующей технической проблемы.
На фиг. 1 - фиг. 6 представлены, следующие части и элементы предлагаемой автоматизированной системы для процедурного физиологического воздействия:
1 - интеллектуальный модуль управления;
2 - гибкое соединение;
3 - рабочий орган;
4 - ручка рабочего органа;
5 - корпус рабочего органа;
6 - клавиши управления рабочим органом;
7 - индикация рабочего органа;
8 - средство вывода информации;
9 - элемент крепления для рабочего органа;
10 - механический ременный редуктор;
11 - электрический двигатель;
12 - электронная плата;
13 - исполнительное массажное средство;
14 - крышка корпуса;
15 - вращающиеся массажные элементы;
16 - органы управления в виде сенсорного дисплея;
17 - рабочий проем корпуса;
18 - колесные средства перемещения;
19 - программируемый процессорный блок управления;
20 - терморезистор;
21 - энкодер.
И так, предлагаемая автоматизированная система для процедурного физиологического воздействия на различные участки поверхности тела пользователя с целью проведения комплексной коррекционно-профилактической терапии, заключающейся в механическом массажном вмешательстве, состоит из интеллектуального модуля управления 1 и рабочего органа 3.
Интеллектуальный модуль управления 1 содержит, объединенные электрическими узловыми соединениями аппаратные компоненты в составе, которых программируемый процессорный блок управления 19 и органы управления, позволяющие выбирать режимы работы системы и управлять массажной нагрузкой. Органы управления могут быть выполнены, например, в виде кнопок, отображаемых на сенсорном дисплее 16, нажатия на которые обрабатываются программируемый процессорный блок управления 19 и служат для управления системой.
Рабочий орган 3 выполнен с возможностью ручного перемещения и представляет из себя отдельный корпусной функциональный модуль, который связан с интеллектуальным модулем управления 1. Рабочий орган 3 содержит электронную плату управления 12, редуктор 10 и исполнительное массажное средство 13 с электродвигателем 11.
Редуктор 10 выполнен ременным, что позволяет применять более мощные и компактные электродвигатели, обеспечивается плавность хода и отсутствие паразитных вибраций и шумов.
Причем корпус 5 имеет рабочий проем 17, редуктор 10 соединен с электродвигателем 11, а электронная плата управления 12 содержит средство измерения скорости вращения электродвигателя, средство измерения электрического тока, потребляемого электродвигателем и элементы управления, позволяющие управлять массажной нагрузкой, а также может содержать средство измерения температуры внутри корпуса. В качестве средства измерения скорости вращения электродвигателя может использоваться энкодер 21, соединенный одной из своих частей с валом электродвигателя 11 и соединенный электрически с электронной платой управления 12. В качестве средства измерения электрического тока, потребляемого электродвигателем могут использоваться датчики тока и напряжения, смонтированные на электронную плату управления 12 и подключенные должным образом к линии электропитания электродвигателем 11. Также в качестве средства измерения электрического тока, потребляемого электродвигателем могут использоваться средства управления питанием интегрированные должным в электронную плату управления 12, например, в качестве элементов управления, позволяющие управлять массажной нагрузкой, могут использоваться клавиши управления рабочим органом 6, соединенные с электронной платой управления 12. В качестве средства измерения температуры внутри корпуса может использоваться терморезистор 20, монтируемый на электродвигатель и соединенный с электронной платой управления.
В качестве указанных средств измерений параметров следует понимать различные системы контроля, которые, в частности, могут быть описаны, следующими способами.
Один из способов заключается в том, что возможно измерение показателей электропитания электродвигателя 11 и измерения скорости вращения электродвигателя 11.
Второй способ заключается в том, что возможно измерение показателей силы тока, температуры внутри корпуса, измерения скорости вращения электродвигателя 11 и др.
И так, обработка сигналов может происходить с различными режимами работы системы.
Сигнал, передаваемый представленными техническими средствами (средствами измерения), обрабатывается интеллектуальным модулем управления 1, а степень силового массажного воздействия отображается в режиме реального времени на шкале индикатора (индикации 7) рабочего органа 3, при этом относительно слабое нажатие и сопротивление вращению исполнительного массажного средства 13 сопровождается индикацией одного светодиода, а относительно сильное силовое воздействие может доходить до индикации десяти светодиодов. Шкала индикации 7 заполняется равномерно при оказании нажатия от минимума к максимуму.
Уровень массажной нагрузки рассчитывается на основании разности тока потребления электродвигателя 11 в ходе непосредственно массажа и холостом режиме (когда исполнительное массажное средство 13 вращается свободно, без соприкосновения с кожей пользователя), что позволяет контролировать массажное воздействие, таким образом улучшается повторяемость полезного эффекта.
Следует отметить, что оказываемое давление на исполнительное массажное средство 13 непосредственно связано с оказываемой массажной нагрузкой.
При этом возможно отключение электродвигателя 11 исполнительного массажного средства 13 и индикация соответствующей ошибки на дисплее интеллектуального модуля управления 1 в случае, если среднее значение потребляемого тока в течение заданного времени превышает пороговое значение. Данный режим работы повышает безопасность эксплуатации, так в случае, если в рабочий орган 3 попадает посторонний предмет, затрудняющий вращение, произойдет автоматическая остановка.
Отключение электродвигателя 11 исполнительного массажного средства 13 и индикация соответствующей ошибки на дисплее интеллектуального модуля управления 1 становится возможным в случае, если пиковое значение потребляемого тока превышает пороговое значение. Данный режим работы также повышает безопасность эксплуатации, например, в случае повреждения электродвигателя 11, произойдет автоматическое отключение, что предотвратит возможное негативное воздействие на пользователя.
Возможно поддержание заданной скорости вращения исполнительного массажного средства 13, а при невозможности ее поддержания обеспечивается отключение электродвигателя 11 и обеспечивается индикация, соответствующей ошибки на дисплее интеллектуального модуля управления 1. Также данный режим повышает безопасность эксплуатации, так, в случае, когда в рабочий орган 3 попадет посторонний предмет, затрудняющий вращение, то произойдет автоматическая остановка и посторонний предмет можно удалить.
Возможно отключение электродвигателя 11 исполнительного массажного средства 13 и индикация соответствующей ошибки на дисплее интеллектуального модуля управления 1, только в том случае если произошла непредусмотренная остановка вращения исполнительного массажного средства. Данный режим также способствует безопасности использования, так, если в рабочий орган 3 попадет посторонний предмет, например, твердый предмет, и заблокирует его вращение, то произойдет автоматическое отключение электродвигателя, что предотвратит повреждение и позволит безопасно исправить ситуацию.
Производится отключение электродвигателя 11 исполнительного массажного средства 13 и индикация соответствующей ошибки на дисплее интеллектуального модуля управления 1, только в том случае, когда температура электродвигателя превышает пороговое значение. В данном случае также повышается безопасность и комфорт эксплуатации, поскольку предотвращается возможное повреждение электродвигателя под воздействием повышенной температуры, что обезопасит пользователя от непредусмотренного температурного воздействия.
Исполнительное массажное средство 13 имеет форму втулки, с расположенными на ее внешней поверхности массажными элементами 15, имеющими скругленную форму, установленными на осях с возможностью вращения, причем упомянутые массажные элементы 15 частично выступают за пределы корпуса 5 модуля через его рабочий проем 17 и создают при работе контролируемую ритмичную нагрузку в отношении обрабатываемой области, проявляющуюся в виде виброкомпрессии и микровибрации адаптивно настраиваемой частоты, происходящих в периодах одномоментного контактирования с поверхностью соответствующего участка тела пользователя нескольких, находящихся во взаимном вращении массажных элементов 15.
Исполнение массажного средства 13 в форме втулки повышает механическую надежность, позволяет изготовить массажное средство в виде отдельного съемного конструктива. Выполнение втулки перфорированной позволяет снизить ее вес, обеспечивая механическую прочность, а также обеспечивается светопропускание от красных излучателей.
Корпус интеллектуального модуля управления 1, как правило выполнен из металла или пластика.
Интеллектуальный модуль управления 1 содержит элемент крепления 9 для рабочего органа.
В данном варианте исполнения интеллектуальный модуль 1 имеет колесные средства перемещения 18, оснащенные стопорным механизмом.
Рабочий орган 3, как правило, снабжается светодиодным элементом красного спектра излучения для стимулирования коллагеновых волокон кожи. Корпус 5 рабочего органа 3 снабжен крышкой 14.
Электродвигатель 11 исполнительного массажного средства 13 расположен внутри перфорированной втулки по одной оси, что благотворно сказывается на эксплуатации, поскольку смещает центр тяжести, приближая его к геометрическому центру рабочей поверхности, что облегчает контроль прилагаемой массажной нагрузки к телу, кроем того появляется компактность и обеспечивается конвекционное охлаждение электродвигателя 11.
В данном варианте реализации изобретения массажные элементы 15 крепятся на оси с использованием подшипника скольжения из полиоксиметилена, полиамида, полипропилена или фторопласта, что позволяет снизить трение между осью и исполнительным массажным средством 13, уменьшая тем самым силу, действующую на кожу пользователя и в результате снижается степень раздражения кожи и минимизируется ее натирание.
Реализуется предлагаемая автоматизированная система для процедурного физиологического воздействия на определенные участки поверхности человеческого тела, следующим образом.
Как правило, управляющими пользователями предлагаемой физиотерапевтической полуавтоматической системы массажного действия являются медицинский персонал, а также специалисты с уровнем квалификации массажиста для категорий лечебно-профилактических отделений медицинских учреждений, центров реабилитации, санаторно-курортных организаций, а также косметологических кабинетов.
Предлагаемая полуавтоматическая система имеет профессиональное назначение и предназначена, как правило, для пациентов перечисленных учреждений, имеющих соответствующие медицинские показания к проведению массажных процедур. Самостоятельное пользование данной системой не допускается.
Предлагаемая автоматизированная система для проведения массажа имеет специализированное техническое исполнение и функционирует от стандартной сети переменного тока и конструкционно ориентировано для выполнения физиотерапевтических механических воздействий, а также возможных разноплановых и единовременных сочетаний силовых воздействий с использованием массажных техник ручного исполнения, что в свою очередь обеспечивает комплексное массажное воздействие на различные участки поверхности тела человека, в целях оказания комплексной терапии на кожу и собственно подкожно-жировые ткани.
Предлагаемая автоматизированная система может исполняться в нескольких комплектациях, но неизменно содержит основной интеллектуальный модуль управления 1, как правило, на колесных средствах перемещения 18, а также рабочий орган 3 с исполнительным массажным средством 13, с помощью которого фактически и происходит массажное воздействие с применением различных массажных техник, которыми в необходимый степени обладает специалист (медицинский работник), которому в свою очередь и вверено соответствующее устройство.
Указанная массажная техника выполнения может также охватывать различные методики по оказанию лимфодренажного оздоровительного действия.
При этом исполнительное массажное средство 13 по существу является массажным роллером и установлено в корпусе 5 с возможностью вращения, для чего в рабочем органе 3 имеется механический ременный редуктор 10 и электрический двигатель 11, функционирование которого поддерживается электронной платой 12.
Исполнительное массажное средство 13 может иметь отличающиеся конструктивные особенности, однако, данный пример реализации подразумевает, преимущественно механическое массажное воздействие, реализуемое с помощью специалиста, обладающего соответствующими техниками массажа и благодаря, имеющимся вращающимся массажным элементам 15, которые в предпочтительных вариантах исполнения могут быть плотно уложены в двенадцатирядную рабочую структуру, облегающую рабочую поверхность перфорированной втулки рабочего органа 3, происходит лечебный/оздоровительный эффект и как следствие восстановление организма пользователя.
В данном примере исполнения под рабочим органом 3 следует понимать ручное массажное устройство (манипула), которое имеет ручку 4, с помощью которой осуществляется удержание и управление функционалом устройства посредством клавиш 6. Так же, как уже было упомянуто ранее, на корпусе 5 рабочего органа 3 имеются индикация 7 состояния работы устройства и средство вывода информации 8, выполненное в виде дисплея.
Отдельно следует отметить интеллектуальный модуль управления 1, который выполнен в корпусном исполнении, и собственно, содержит корпус 5, объединяющим оборудование для управления и поддержания функциональности рабочего органа 3. К числу упомянутого оборудования относятся, объединенные электрическими узловыми соединениями аппаратные компоненты в составе которых процессорный блок, вакуумный насос (при необходимости), блок питания, электронные компоненты, вентилятор и размещаемые опционально фильтрующие элементы.
Кроме того, установлен элемент крепления 9, служащий для удержания рабочего органа 3 в нерабочем, т.е. неэксплуатируемом положении.
Как уже было указано выше, важной конструктивной особенностью является то, что исполнительное массажное средство 13 взаимодействует с интеллектуальным модулем управления 1 посредством гибкого соединения 2, выполненного в виде электрического кабеля.
Отдельно следует отметить программную особенность процессорного блока, который имеет возможности интеллектуальной обработки информационных данных и в следствии этого выработке оптимально подходящих для каждого пациента в отдельности техник и особенностей массажного воздействия, которыми в сочетании с ручным управлением и ввиду имеющегося функционала обладает рабочий орган 3. Для возможности интеллектуальной обработки процессорный блок интеллектуального модуля управления 1 имеет программируемую архитектуру системного обеспечения, способного проводить аналитическую обработку, исходящих сигналов, поступающих от средств измерения, исполненных в виде упомянутых ранее систем контроля работы исполнительного массажного средства 13. Интеллектуальная обработка реализуется, в частности, за счет того, что используемая программируемая архитектура системного обеспечения имеет возможность принятия и проведения аналитической обработки контрольных сигналов, которые, как указано, исходят от определенного средства измерения, формируя в режиме реального времени, подстройку параметров электропитания электродвигателя, а также распознавание и информационное предупреждение о недостаточной или избыточной массажной нагрузки на человеческое тело, о параметрах работы электродвигателя 11 и др. При этом важно отметить, что предельно допустимые особенности физиологии могут быть заранее определены и учитываются в работе программного функционала системы. Также могут быть реализованы различные режимы управления массажной нагрузки.
Один из таких способов заключается в том, что в процессе массажа поддерживается скорость вращения исполнительного массажного средства 13, что при увеличении силы, с которой массажист прижимает исполнительное массажное средство к пациенту, приводит к увеличению массажной нагрузки за счет увеличившегося трения.
Второй способ заключается в том, что в процессе массажа скорость вращения исполнительного массажного средства 13 адаптивно изменяется в зависимости от выбранного режима адаптации и его параметров, что при изменении силы, с которой массажист прижимает исполнительное массажное средство к пациенту, приводит к адаптации массажной нагрузки. В частности, возможно линейное увеличение массажной нагрузки или скорости вращения исполнительного массажного средства 13 при увеличении силы прижима до заданного значения.
В соответствии с конструкцией рабочего органа 3 массажные элементы 15 исполнительного массажного средства 13 частично выходят за пределы корпуса 5 через рабочий проем 17 и способны создавать при работе контролируемую ритмичную нагрузку в отношении обрабатываемой области в виде образующейся виброкомпрессии адаптивно настраивающейся частоты, помимо этого образуется микровибрация адаптивно настраивающейся частоты, при этом указанная ритмичная нагрузка наблюдается в периоды одномоментного контактирования с поверхностью соответствующего участка человеческого тела нескольких находящихся во взаимном вращении массажных элементов 15.
Пример реализации предлагаемого изобретения может характеризоваться, следующими последовательностями действий.
Пациент укладывается на массажный стол, далее специалистом (массажист, медицинский работник) производится первичное назначение режима массажа, затем под контролем специалиста проводится массажное воздействие требуемой области, например, шейного отдела позвоночника, после чего указанные средства измерений параметров средства измерения, передают предварительно полученные показатели в процессорный блок, где производится аналитическая обработка и впоследствии специалистом формируются подходящая методология работы.
После произведенной аналитической обработки, электронная плата 12 рабочего органа 3 получает определенные информационные сигналы, ориентируясь на которые производится управление и активируется работа исполнительного массажного средства 13 и соответственно его вращающихся массажных элементов 15. При этом специалист, используя определенные техники массажа, удерживая рабочий орган 3 за ручку 4 производит массажное воздействие на требуемую область тела (шейный участок) путем кратковременных надавливающих манипуляций с проводкой по всей шее от плеч до затылочной части головы.
Процедура длится 30-75 мин и может включать несколько курсов от 5 до 12 сеансов.
При этом вращающиеся массажные элементы 15 исполнительного массажного средства 13 позволяют плавно перемещать манипулу по телу и обеспечивается массажное воздействие на кожные ткани.
При вращении массажные элементы 15 оказывают ритмичное воздействие на кожу в виде виброкомпрессии и микровибрации заданной частоты, оказывая тем самым физиотерапевтическое воздействие.
Частота вращения исполнительного массажного средства 13, а также виброкомпрессии и микропульсаций соответственно может регулироваться с помощью блока управления 19 интеллектуального модуля управления 1 или путем нажатия на клавиши управления 6 на рабочем органе 3, интенсивность воздействия (усилие надавливания) может регулироваться непосредственно специалистом, при этом, как уже было указано выше, система способна распознавать и регулировать недостаточную или избыточную нагрузку на тело пациента, соответствующая информация может отображаться на индикаторе (индикация) 7 рабочего органа 3.
При этом системой предусмотрено, а оператором учитывается, что уровень силового нажима индивидуален для каждого пациента, типа и места физиотерапевтического воздействия.
Во время работы индикация 7 рабочего органа 3 ориентирует и направляет к оптимальному уровню оказываемого силового массажного воздействия. Таким образом, для того, чтобы сохранять корректный уровень воздействия оператору необходимо находить баланс и учитывать, чтобы степень нажатия соответствовала выработанной системой методике, особенностям пациента, этапам процедуры и конкретному месту воздействия.
Особенностью системы является то, что при чрезмерно высоком силовом массажном воздействии издает звуковой предупреждающий сигнал и способно прекращать работу во избежании нанесения травм и с целью предупреждения возможного повреждения конструкции рабочего органа 3.
Также существует возможность регулировки чувствительности рабочего органа 3, что осуществляется с помощью блока управления 19, поскольку имеется три уровня настройки – высокий, средний и низкий. Так, при настройке высокого уровня для заполнения светодиодной шкалы оператору потребуется приложить относительно больше усилий, а при настройке низкого уровня соответственно – меньше.
Встроенная светодиодная подсветка красного спектра излучения рабочего органа 3 имеет способность дополнительного стимулирования коллагеновых волокон, поскольку под воздействием красного света в коже активизируются обменные процессы, а также усиливается выработка коллагена.
Предлагаемое изобретение может найти широкое применение в области медицины, косметологии и спорта, при этом наиболее успешно может быть использовано для эстетической и косметической коррекции фигуры, для профилактики мышц после интенсивных физических нагрузок, для лечения болезней позвоночника, для реабилитации после травм и хирургических вмешательств, для улучшения тонуса, иммунитета, самочувствия, а также для укрепления общего физического состояния.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| Система контроля поставленного на охрану объекта | 2020 |
|
RU2741380C1 |
| ВИБРАЦИОННАЯ КРОВАТЬ ФАДЕЕВЫХ | 2005 |
|
RU2283639C1 |
| Локальная система автоматического управления дизель-генератором | 2018 |
|
RU2732072C1 |
| СПОСОБ КОМПЛЕКСНОГО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМИ СИСТЕМАМИ С ПОМОЩЬЮ КОМПЬЮТЕРА УПРАВЛЕНИЯ ЭЛЕКТРОСЕТЯМИ | 2019 |
|
RU2710048C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
| ВАКУУМНЫЙ МАССАЖЕР | 2002 |
|
RU2237462C2 |
| МОБИЛЬНЫЙ ТЕЛЕФОН С ЛЕЧЕБНО-ДИАГНОСТИЧЕСКИМИ ФУНКЦИЯМИ | 2012 |
|
RU2521104C2 |
| ЛЕЧЕБНО-ОЗДОРОВИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2236211C2 |
Изобретение относится к медицинской технике, а именно к автоматизированной системе для процедурного физиологического воздействия на различные участки поверхности тела пользователя с целью проведения комплексной коррекционно-профилактической терапии, заключающейся в механическом массажном вмешательстве. Система состоит из интеллектуального модуля управления и рабочего органа. Интеллектуальный модуль управления содержит объединенные электрическими узловыми соединениями аппаратные компоненты, такие как программируемый процессорный блок и органы управления. Органы управления позволяют выбирать режимы работы системы и управлять массажной нагрузкой. Рабочий орган выполнен перемещаемым в виде отдельного корпусного функционального модуля, связан с интеллектуальным модулем управления. Рабочий орган содержит исполнительное массажное средство, электродвигатель, редуктор, средство измерения скорости вращения электродвигателя, средство измерения электрического тока, потребляемого электродвигателем. Корпусной модуль имеет рабочий проем. Исполнительное массажное средство через редуктор соединено с электродвигателем. Исполнительное массажное средство имеет форму полой втулки с расположенными на ее внешней поверхности массажными элементами скругленной формы. Массажные элементы установлены на осях с возможностью вращения и частично выступают за пределы корпуса модуля через его рабочий проем. Массажные элементы создают при работе контролируемую ритмичную нагрузку в отношении обрабатываемой области, проявляющуюся в виде виброкомпрессии и микровибрации адаптивно настраиваемой частоты, происходящих в периодах одномоментного контактирования с поверхностью соответствующего участка тела пользователя находящихся во взаимном вращении массажных элементов. За счет рабочего органа в виде отдельного корпусного функционального модуля обеспечивается возможность проведения массажа всего тела пользователя на любых участках, доступных для массажа, обеспечивается повышение безопасности и эффективности производимых массажных процедур, точность выбора параметров физиотерапевтического воздействия. 27 з.п. ф-лы, 6 ил.
1. Автоматизированная система для процедурного физиологического воздействия на различные участки поверхности тела пользователя с целью проведения комплексной коррекционно-профилактической терапии, заключающейся в механическом массажном вмешательстве, состоящая из интеллектуального модуля управления и рабочего органа, указанный интеллектуальный модуль управления содержит объединенные электрическими узловыми соединениями аппаратные компоненты в составе, которых программируемый процессорный блок и органы управления, позволяющие выбирать режимы работы системы и управлять массажной нагрузкой, указанный рабочий орган выполнен перемещаемым в виде отдельного корпусного функционального модуля, связанного с интеллектуальным модулем управления, и содержащего исполнительное массажное средство, электродвигатель, редуктор, средство измерения скорости вращения электродвигателя, а также средство измерения электрического тока, потребляемого указанным электродвигателем, упомянутый корпусной модуль имеет рабочий проем, а исполнительное массажное средство через редуктор соединено с электродвигателем, при этом исполнительное массажное средство имеет форму полой втулки, с расположенными на ее внешней поверхности массажными элементами, имеющими скругленную форму, установленными на осях с возможностью вращения, причем упомянутые массажные элементы частично выступают за пределы корпуса модуля через его рабочий проем и создают при работе контролируемую ритмичную нагрузку в отношении обрабатываемой области, проявляющуюся в виде виброкомпрессии и микровибрации адаптивно настраиваемой частоты, происходящих в периодах одномоментного контактирования с поверхностью соответствующего участка тела пользователя нескольких, находящихся во взаимном вращении массажных элементов.
2. Автоматизированная система по п. 1, отличающаяся тем, что содержит средство измерения температуры внутри корпусного функционального модуля.
3. Автоматизированная система по п. 1, отличающаяся тем, что рабочий орган содержит электронную плату управления и элементы управления, позволяющие управлять массажной нагрузкой.
4. Автоматизированная система по п. 1, отличающаяся тем, что процессорный блок имеет программируемую архитектуру системного обеспечения, имеющего возможность принятия и обработки контрольных сигналов, исходящих от средства измерения рабочего органа при оказании силового воздействия, обеспечивая в режиме реального времени, распознавание и информационное предупреждение о недостаточной или избыточной силовой массажной нагрузки на тело пользователя, допустимые особенности физиологии которого определены и учтены в работе программного функционала.
5. Автоматизированная система по п. 1, отличающаяся тем, что интеллектуальный модуль управления и рабочий орган связаны друг с другом посредством гибкого соединения или путем беспроводной связи.
6. Автоматизированная система по п. 1, отличающаяся тем, что корпус интеллектуального модуля управления выполнен металлическим или пластиковым.
7. Автоматизированная система по п. 6, отличающаяся тем, что корпус снабжен элементом крепления для удерживания рабочего органа в неэксплуатируемом положении.
8. Автоматизированная система по п. 1, отличающаяся тем, что вращающиеся массажные элементы исполнительного массажного средства плотно уложены в двенадцатирядную структуру, облегающую внешнюю поверхность втулки.
9. Автоматизированная система по п. 8, отличающаяся тем, что часть массажных элементов имеет твердость по Шору (А) от 60 до 80 ед.
10. Автоматизированная система по п. 1, отличающаяся тем, что интеллектуальный модуль управления имеет колесные средства перемещения, оснащенные стопорным механизмом.
11. Автоматизированная система по п. 1, отличающаяся тем, что рабочий орган оснащен светодиодным элементом светового потока красного спектра излучения для дополнительного стимулирования коллагеновых волокон кожи путем светотерапии (фототерапии).
12. Автоматизированная система по п. 1, отличающаяся тем, что массажные элементы выполнены из силикона или по структуре схожего с резиной материала и имеют внутри несимметричный элемент, противодействующий прокручиванию.
13. Автоматизированная система по п. 1, отличающаяся тем, что в неэксплуатируемом положении исполнительное массажное средство помещено в цилиндрический съемный корпус, предназначенный для сбора остаточного массажного масла.
14. Автоматизированная система по п. 1, отличающаяся тем, что часть массажных элементов диаметром от 10 до 25 мм имеют сходные плоскости вращения и углы качения относительно друг друга.
15. Автоматизированная система по п. 8, отличающаяся тем, что массажные элементы уложены с зазором относительно рабочей поверхности втулки.
16. Автоматизированная система по п. 1, отличающаяся тем, что корпус рабочего перемещаемого органа снабжен крышкой.
17. Автоматизированная система по п. 1, отличающаяся тем, что электродвигатель исполнительного массажного средства расположен внутри втулки по одной оси.
18. Автоматизированная система по п. 1, отличающаяся тем, что втулка одним из торцов закреплена на редукторе с обеспечением механического зацепления.
19. Автоматизированная система по п. 1, отличающаяся тем, что рабочий орган содержит подключенный к электронной плате управления индикатор в виде дисплея, отображающего уровень массажной нагрузки.
20. Автоматизированная система по п. 2, отличающаяся тем, что интеллектуальный модуль управления содержит дисплей, отображающий параметры массажной нагрузки.
21. Автоматизированная система по п. 20, отличающаяся тем, что производится отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее в случае, если среднее значение потребляемого тока в течение заданного времени превышает пороговое значение.
22. Автоматизированная система по п. 20, отличающаяся тем, что производится отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее в случае, если пиковое значение потребляемого тока превышает пороговое значение.
23. Автоматизированная система по п. 20, отличающаяся тем, что производится поддержание заданной скорости вращения исполнительного массажного средства, а при невозможности ее поддержания обеспечивается отключение электродвигателя и индикация, соответствующей ошибки на дисплее.
24. Автоматизированная система по п. 20, отличающаяся тем, что производится отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее, в случае если произошла непредусмотренная остановка вращения исполнительного массажного средства.
25. Автоматизированная система по п. 20, отличающаяся тем, что производится отключение электродвигателя исполнительного массажного средства и индикация соответствующей ошибки на дисплее, в случае, когда температура электродвигателя превышает пороговое значение.
26. Автоматизированная система по п. 1, отличающаяся тем, что втулка массажного средства выполнена перфорированной.
27. Автоматизированная система по п. 1, отличающаяся тем, что массажные элементы выполнены сферическими и крепятся на оси, проходящей через их центр.
28. Автоматизированная система по п. 1, отличающаяся тем, что массажные элементы крепятся на оси с использованием подшипника скольжения из полиоксиметилена, полиамида, полипропилена или фторопласта.
| WO 2004024054 A1, 25.03.2004 | |||
| CN 208974533 U, 14.06.2019 | |||
| US 2020352822 A1, 12.11.2020 | |||
| JP 2014521410 A, 28.08.2014 | |||
| RU 2015128624 A, 20.01.2017. |

