Изобретение относится к области медицины и предназначено для медицинского лечебного воздействия, а именно массажа и стимуляции процессов, в том числе обменных, в организме пациента, устранения застойных явлений, осуществления воздействия на кожные покровы и биологически активные зоны, лечения ожирения, а также физиотерапевтической реабилитации спортсменов.
Известно пневмомассажное устройство по патенту RU на изобретение № 2161474. Оно выполнено в виде костюма, содержит застежки-молнии для подгонки по росту и объему, систему подачи и сброса воздуха с регулировочным блоком, связанную с плоскими пневматическими панелями. В устройстве имеются поперечные клапаны для прижатия панели к телу человека, соединенные застежками, и эластичные натяжители, размещенные в местах противохода панелей. Кроме того, в устройстве предусмотрены жесткие пластины для опоры камер в местах ладоней и ступней и камеры в виде сапожка для установки на голеностопе. Панели разделены на отдельные параллельные камеры для воздействия поперек тела человека и имеют жесткие быстросъемные воздействующие элементы. Количество каналов в панели, ширина камеры и длина панели связаны математическим соотношением.
Однако данное устройство не может осуществлять комбинированное воздействие на тело человека: разминание мягких тканей по типу японской терапии “шиацу”, растирание массируемой поверхности, манипуляции мягкими тканями сжиманием и растяжением; акупрессурную терапию, стимуляцию околопозвоночных областей и коррекцию позвонков и т.д. Иначе говоря, эффективность данного устройства недостаточно высока.
Известен также массажный робот по патенту Японии № 06304217 А (YOKOYAMA MITSUHIRO), дата публикации описания 01.11.94, МПК А 61 Н 7/00. Это устройство оснащено блоком управления, расположенным в корпусе и предназначенным для управления перемещением основания, и включает привод перемещения относительно оси, массажный инструмент, гидравлический цилиндр и средство для осуществления пальцевого надавливания - имитатор пальца.
В данном изобретении операции воздействия на поверхность тела человека осуществляются с помощью массажного инструмента-имитатора части руки массажиста. Перемещение инструмента осуществляют по программе от системы управления с помощью приводов. Данное изобретение решает задачу разгрузки массажиста и позволяет облегчить его труд, предназначено для проведения в основном точечного или пальцевого массажа.
Данное устройство на дату разработки его имело достаточное количество блоков автоматизации и управления, приводящих в движение и контролирующих действие массажного элемента.
Однако перенастройка робота с точечного воздействия на массаж на протяженных участках невозможна или занимает продолжительное время при высокой сложности работ, что является нецелесообразным. Устройство не позволяет одномоментно обрабатывать большую площадь тела пациента. В таком случае роботу необходимы несколько или много рук-манипуляторов, это является дорогой и нецелесообразной процедурой его использования. Еще одним недостатком данного изобретения является отсутствие силового контроля за массажным воздействием.
Наиболее близким аналогом является устройство для осуществления массажа по патенту RU 2145833. Устройство содержит массажный инструмент, соединенный с исполнительным механизмом с возможностью управляемого перемещения. Отличие его заключается в том, что исполнительный механизм выполнен в виде манипулятора робота, оснащенного электромеханическими приводами и системой управления. На массажном инструменте установлен датчик для измерения массажного воздействия. Он соединен с системой управления. Робот является промышленным, имеет несколько степеней подвижности.
Один из заявляемых вариантов предусматривает съем и замену массажного инструмента, который закреплен на фланце манипулятора через разъем.
В наиболее близком аналоге заявлено несколько вариантов имитаторов воздействия: в виде ребра ладони, плоскости ладони, имитаторов большого и указательного пальцев, разводимых в противоположные стороны, а также в виде имитатора подушечки большого пальца.
Предусмотрено средство для отключения манипулятора робота при неадекватных ощущениях пациента.
Недостатками данного устройства является высокая сложность, громоздкость и чрезмерно высокая стоимость, неоправданная для медицинского массажного инструмента.
Промышленная робототехника, созданная для технологических операций, где труд человека исключен, а именно: агрессивные среды, высокие температуры, труднодоступные участки с повышенной опасностью, не является лучшим вариантом осуществления утилитарных задач массажиста. Кроме того, необоснованно высокие затраты на производство, установку, отладку, эксплуатацию и ремонт сложнейшей робототехники неадекватны достигаемым результатам в области массажа.
Задачей изобретения является повышение эффективности массажа за счет устранения перечисленных выше недостатков и расширения функциональных возможностей устройства при повышении уровня его технологичности.
Технический результат заключается в обеспечении проведения контролируемого массажного воздействия.
Сущность заявляемого изобретения заключается в том, что в лечебно-оздоровительном устройстве, содержащем массажный инструмент, соединенный с чувствительным элементом для измерения величины массажного воздействия и с исполнительным механизмом с возможностью управляемого движения, исполнительный механизм выполнен в виде двумерной матрицы периодически расположенных исполнительных элементов, снабженной несущей и защитной панелями, исполнительные элементы представляют собой пневматические камеры, вертикально ориентированные по отношению к несущей панели и имеющие боковые стенки в виде складывающихся гофр, формообразующие основания расположены со стороны несущей панели, противолежащие им основания являются рабочими площадками массажного инструмента, выполненными с возможностью перемещения посредством гофра, в формообразующих основаниях установлены электромеханические элементы в виде электромагнитных пневмокоммутаторов, имеющих возможность управляемого включения и выключения и соединенных с подводящими и отводящими каналами высокого и низкого давления посредством воздухопроводов, которые в свою очередь соединены посредством магистралей высокого и низкого давления с пневмоэлектрическим блоком, выполненным с возможностью подачи сжатого и разреженного воздуха, причем каналы высокого и низкого давления расположены между несущей и защитной панелями, а чувствительный элемент для измерения величины массажного воздействия представляет собой ряд датчиков, каждый из которых установлен в формообразующем основании.
Технический результат усиливается за счет того, что в формообразующих основаниях исполнительных элементов установлены электроакустические преобразователи.
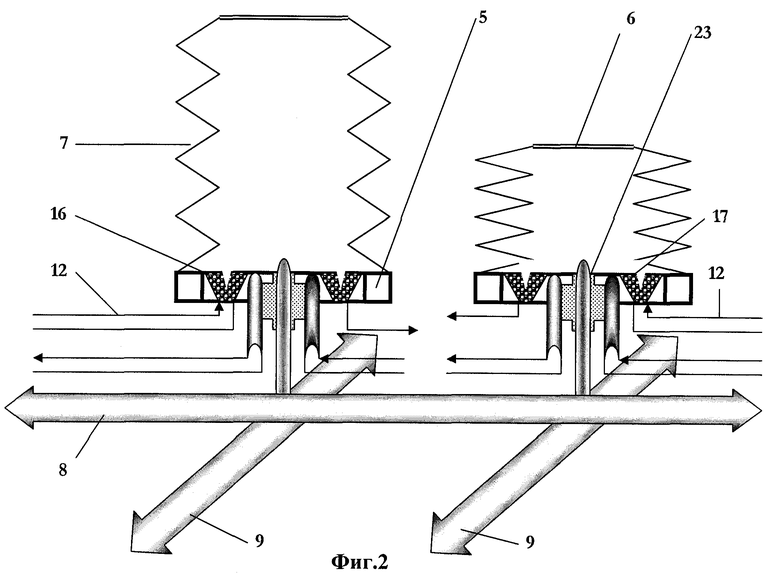
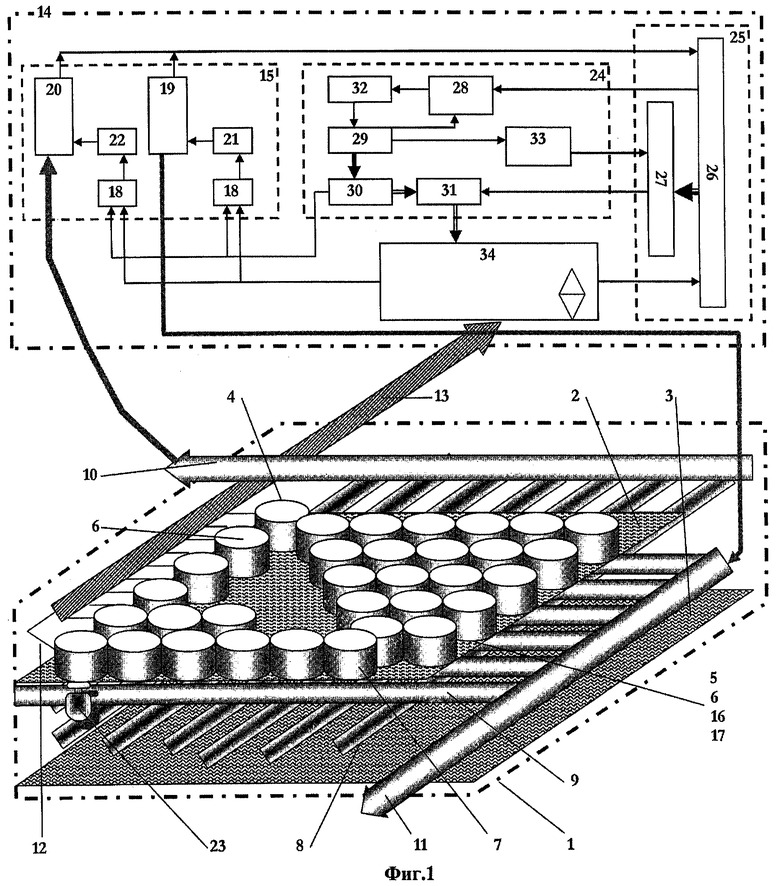
Изобретение иллюстрируется с помощью чертежей, где на фигуре 1 представлена общая схема заявляемого устройства, а на фигуре 2 изображен исполнительный элемент с формообразующим основанием и пневмоэлектрическими и электронными компонентами в нем. На представленных фигурах 1 и 2 цифрами обозначены:
1 - исполнительный механизм;
2 - несущая панель;
3 - защитная панель;
4 - исполнительный элемент;
5 - формообразующее основание;
6 - рабочая площадка;
7 - боковая стенка;
8 - подводящий канал высокого давления;
9 - отводящий канал низкого давления;
10 - магистраль высокого давления;
11 - магистраль низкого давления;
12 - электрический шнур;
13 - электрический кабель;
14 - система управления;
15 - пневмоэлектрический блок;
16 - электроакустический преобразователь;
17 - датчик давления;
18 - электрическое реле;
19 - форвакуумный баллон;
20 - ресивер;
21 - форвакуумный насос;
22 - компрессор;
23 - электромагнитный пневмокоммутатор;
24 - блок анализа и обработки информации;
25 - блок формирователей;
26 - логарифмические усилители;
27 - компараторы;
28 - схемы сравнения;
29 - запоминающие устройства (ЗУ);
30 - регистры;
31 - усилители мощности;
32 - тактовый генератор;
33 - цифроаналоговые преобразователи (ЦАП);
34 - пускораспределительный блок.
Заявляемое лечебно-оздоровительное устройство содержит пневматические и электронные блоки, причем последние включают управляющие и анализирующие элементы. Существенным отличием заявляемого устройства является оригинальность исполнительного механизма и специфика связей его элементов с элементами других блоков в устройстве.
Исполнительный механизм 1 состоит из ряда несущих панелей 2 и соответственно такого же количества защитных панелей 3, количество которых совпадает с числом обрабатываемых частей тела: две - для рук, две - для ног, одна для туловища и одна для головы. В случае необходимости выполняются панели и для стоп. Основой исполнительного механизма является несущая панель 2, на которой формируется система периодически расположенных исполнительных элементов 4 в виде двумерной матрицы. Исполнительные элементы 4 представляют собой пальцеобразные полые надувные камеры, имеющие основания 5 исполнительных элементов 4 со стороны несущей панели 2 и рабочие площадки 6 исполнительных элементов 4, а также гофрированные боковые стенки 7. Исполнительные элементы 4 ориентированы вертикально по отношению к несущей панели 2. Между несущей панелью 2 и защитной панелью 3 исполнительного механизма размещены подводящие каналы высокого давления 8 и отводящие каналы низкого давления 9 и объединяющие их магистрали 10 и 11 соответственно высокого и низкого давления, а также проложены электрические шнуры 12, собранные в электрический кабель 13, к системе управления 14. В торце исполнительного элемента 4, являющегося формообразующим основанием 5, размещается электромагнитный пневмокоммутатор 23, электроакустический преобразователь 16 и чувствительный элемент в виде датчика давления 17.
Пневмоэлектрический блок 15, служащий для питания сжатым и разреженным воздухом исполнительного механизма 1, содержит ряд пневмомеханических и электрических узлов: два электрических реле 18, каждое из которых подключено к цепи питания и цепи управления, форвакуумный насос 21 и компрессор 22, соединенные соответственно с форвакуумным баллоном 19 и ресивером 20. В последних, в форвакуумном баллоне 19 и ресивере 20 предусмотрены датчики давления, как правило встроенные. Они предназначены для задания предельных давлений в форвакуумном баллоне 19 и ресивере 20.
Для приведения в действие исполнительного механизма 1 предусмотрен пускораспределительный блок 34, который подключен к сети электрического тока. Он осуществляет связь исполнительного механизма 1 с блоками системы управления 14 и представляет собой ряд разъемных элементов с рядом многопозиционных реле и кнопку “пуск”. Блок формирователей 25 включает в себя ряд логарифмических усилителей 26 и последовательно соединенных с ними компараторов 27.
Блок анализа и обработки информации 24 состоит из запоминающих устройств (ЗУ) 29, тактового генератора 32, задающего опорную частоту для всех электронных узлов всех блоков, схем сравнения 28, служащих для обеспечения стабильной работы лечебно-оздоровительного устройства и исключения аварийных ситуаций при выходе из строя тех или иных узлов путем блокировки исполнительных элементов, а также служащих для отключения всего устройства при завершении рабочего цикла. Кроме того, блок анализа и обработки информации 24 содержит регистры 30, усилители мощности 31 и цифроаналоговые преобразователи (ЦАП) 33.
Работа лечебно-оздоровительного устройства осуществляется следующим образом.
До включения устройства врачом проводится аппаратурный, включая компьютерную диагностику, и клинический контроль состояния пациента, измеряются уровень а/д, пульс и другие значимые параметры. Пациенты с наличием серьезных патологий и других противопоказаний к процедурам не допускаются. Для исполнения назначенной процедуры пациента размещают на рабочем столе сидя или лежа в зависимости от применяемых способов воздействия.
Элементы исполнительного механизма закрепляются на частях тела пациента и фиксируются застежками. При включении кнопки “пуск” на пускораспределительном блоке 34 на все блоки заявляемого устройства подаются необходимые питающие напряжения. В течение 1-3 минут в форвакуумном баллоне 19 и ресивере 20 пневмоэлектрического блока 15 с помощью соответственно форвакуумного насоса 21 и компрессора 22 создается низкое и высокое давление воздуха, необходимые для нормального функционирования исполнительных элементов 4. Управление работой форвакуумного насоса 21 и компрессора 22 осуществляет блок анализа и обработки информации 24 через электрические реле 18. Электрические шнуры 12, собранные в электрический кабель 13, осуществляют электрические связи исполнительных элементов 4 с пускораспределительным блоком 34. Далее электромагнитные пневмокоммутаторы 23, электроакустические преобразователи 16, датчики давления 17 начинают функционировать. Последовательные подключения камер исполнительных элементов 4 с помощью электромагнитных пневмокоммутаторов 23 к подводящим каналам высокого 8 и отводящим 9 низкого давления по командам блока анализа и обработки 24 приводят рабочие площадки 6 в движение. Величины высокого и низкого давления в соответствующих магистралях 10 и 11, а также время нахождения в открытом состоянии электромагнитных пневмокоммутаторов 23 определяют значения сил механического воздействия на пациента и размах возвратно-поступательных перемещений рабочих площадок 6. Исполнительные элементы 4, составляющие двумерную матрицу и приводимые в движение в разнообразных комбинациях, благодаря пальцеобразной форме без ограничений осуществляют любую процедуру массажного, акупрессурного воздействия механическими силами сжимающего и растягивающего характера. При этом возможно комбинированное воздействие механического с ультразвуковым, осуществляемым с помощью электроакустических преобразователей 16. Блок формирователей 25 усиливает сигналы с датчиков давления 17 и согласовывает их со входами блока анализа и обработки информации 24. Программы, содержащие информацию о давлении воздуха в исполнительных элементах 4, о времени включения и выключения электроакустических преобразователей 16 и об очередности включения и выключения электромагнитных пневмокоммутаторов 23 заложены в постоянных запоминающих устройствах 29 блока анализа и обработки информации 24.
Изобретение относится к области медицины и предназначено для воздействия на кожные покровы и биологически активные зоны тела пациента. Устройство содержит массажный инструмент, соединенный с чувствительным элементом для измерения величины массажного воздействия и с исполнительным механизмом с возможностью управляемого движения. Исполнительный механизм выполнен в виде двумерной матрицы периодически расположенных исполнительных элементов, снабженной несущей и защитной панелями, исполнительные элементы представляют собой пневматические камеры, вертикально ориентированные по отношению к несущей панели и имеющие боковые стенки в виде складывающихся гофр. Формообразующие основания расположены со стороны несущей панели, противолежащие им основания являются рабочими площадками массажного инструмента, выполненными с возможностью перемещения посредством гофра. В формообразующих основаниях установлены электромеханические элементы в виде электромагнитных пневмокоммутаторов, имеющих возможность управляемого включения и выключения и соединенных с подводящими и отводящими каналами высокого и низкого давления посредством воздухопроводов, которые в свою очередь соединены посредством магистралей высокого и низкого давления с пневмоэлектрическим блоком, выполненным с возможностью подачи сжатого и разреженного воздуха. Каналы высокого и низкого давления расположены между несущей и защитной панелями, а чувствительный элемент для измерения величины массажного воздействия представляет собой ряд датчиков, каждый из которых установлен в формообразующем основании. Изобретение позволяет проводить контролируемое массажное воздействие. 1 з.п. ф-лы, 2 ил.
| СПОСОБ МАССАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145833C1 |
| US 6212719 В1, 10.04.2001 | |||
| ЛЕЧЕБНО-ПРОФИЛАКТИЧЕСКАЯ МЯГКАЯ МЕБЕЛЬ | 1993 |
|
RU2027393C1 |
| Устройство для замыкания сигнальной цепи в определенный час и в определенные промежутки времени | 1931 |
|
SU26944A1 |

