ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[001] В данной заявке испрашивается приоритет по предварительной заявке на патент США с серийным номером 62/586,478, поданной 15 ноября 2017 г., содержание которой включено в данный документ в полном объеме посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[002] Данное изобретение относится к устройству для доставки лекарственных препаратов, а именно к системам парентерального введения лекарственных препаратов.
УРОВЕНЬ ТЕХНИКИ
[003] Для доставки вводимых субстанций, например, сильнодействующих лекарственных препаратов, в объект, например, животное или пациента, часто требуется точное знание количества, которое доставляется и/или вводится, для предотвращения случаев передозировки или недостаточной дозировки.
[004] В связи с этим для измерения количества субстанции, которая должна быть доставлена и/или была доставлена, часто используют шприцы с градуированными метками на прозрачном цилиндре.
[005] Вместе с тем количественная оценка объема доставляемой субстанции посредством визуальной проверки градуированных меток может быть недостаточно точной и, в зависимости от ситуации, может быть даже невозможной, например, в случае бесцветной и/или прозрачной субстанции и/или среды со слабой световой отдачей, и/или субстанции, оставляющей следы, создающие затруднительное визуальное восприятие градуированных меток.
[006] Поэтому требуется устройство для доставки лекарственных препаратов, которое позволяет точно определять количество применяемого лекарственного препарата и устранять вышеупомянутые недостатки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[007] Вследствие этого целью данного изобретения является создание устройства доставки лекарственных препаратов, в котором устраняются вышеупомянутые недостатки.
[008] В одном неограничивающем иллюстративном примере представлено устройство для доставки лекарственных препаратов. Устройство для доставки лекарственных препаратов содержит цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня, цепь электропитания для выдачи входных токов, антенну, закрепленную вдоль цилиндра, содержащую плату с печатным монтажом с совокупностью слоев, последовательно установленных друг на друга и соединенных с цепью электропитания, и совокупность катушек индуктивности, отпечатанных на совокупности слоев для приема входных токов, создания индуктивного сопротивления совместно с поршнем и выдачи выходных токов в соответствии с величиной индуктивного сопротивления, идентификатор объекта для определения маркера объекта и выдачи сигналов считывания объекта в соответствии с данными об объекте, идентификатор субстанции для считывания маркера субстанции и выдачи сигналов считывания субстанции в соответствии с данными о субстанции, и электрическую схему для обработки данных, выполненную с возможностью приема выходных токов, сигналов считывания объекта и сигналов считывания субстанции, определения количества субстанции внутри цилиндра на основании выходных токов, извлечения данных об объекте на основании сигналов считывания объекта и извлечения данных о субстанции на основании сигналов считывания субстанции.
[009] В одном неограничивающем иллюстративном примере представлено устройство для доставки лекарственных препаратов. Устройство для доставки лекарственных препаратов содержит цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня, цепь электропитания для выдачи входных токов, антенну, закрепленную вдоль цилиндра, содержащую плату с печатным монтажом с совокупностью слоев, последовательно установленных друг на друга и соединенных с цепью электропитания, и совокупность катушек индуктивности, отпечатанных на совокупности слоев для приема входных токов, создания индуктивного сопротивления совместно с поршнем и выдачи выходных токов в соответствии с величиной индуктивного сопротивления, и электрическую схему для обработки данных, соединенную с совокупностью катушек индуктивности и выполненную с возможностью приема выходных токов и определения количества субстанции внутри цилиндра на основании выходных токов.
[0010] В одном неограничивающем иллюстративном примере представлено устройство для доставки лекарственных препаратов. Устройство для доставки лекарственных препаратов содержит цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня, цепь электропитания для выдачи входных токов, антенну, закрепленную вдоль цилиндра, для приема входных токов, создания индуктивного сопротивления совместно с поршнем и выдачи выходных токов в соответствии с величиной индуктивного сопротивления, и электрическую схему для обработки данных, выполненную с возможностью приема выходных токов и определения количества субстанции внутри цилиндра на основании выходных токов.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0011] Для облегчения идентификации при рассмотрении какого-либо конкретного элемента или действия наиболее значащая цифра или цифры в номере позиции об номер фигуры, на которой этот элемент вводится впервые.
[0012] Фиг. 1А представляет собой аксонометрическое изображение устройства для доставки лекарственных препаратов согласно некоторым аспектам изобретения;
[0013] фиг. 1В представляет собой изображение поперечного разреза устройства для доставки лекарственных препаратов согласно некоторым аспектам изобретения;
[0014] фиг. 2 представляет собой схематическое изображение измерительной системы устройства для доставки лекарственных препаратов согласно некоторым аспектам изобретения;
[0015] фиг. 3 представляет собой изображение с пространственным разделением деталей антенны измерительной системы согласно некоторым аспектам изобретения;
[0016] фиг. 4А представляет собой схематическое изображение первого типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0017] фиг. 4B представляет собой схематическое изображение второго типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0018] фиг. 4C представляет собой схематическое изображение третьего типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0019] фиг. 4D представляет собой схематическое изображение четвертого типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0020] фиг. 4E представляет собой схематическое изображение пятого типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0021] фиг. 4F представляет собой схематическое изображение шестого типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0022] фиг. 4G представляет собой схематическое изображение седьмого типового варианта компоновки катушек индуктивности антенны согласно некоторым аспектам изобретения;
[0023] фиг. 5 представляет собой схематическое изображение системы слежения устройства для доставки лекарственных препаратов согласно некоторым аспектам изобретения;
[0024] фиг. 6 представляет собой блок-схему последовательности операций по способу управления устройством для доставки лекарственных препаратов согласно некоторым аспектам изобретения;
[0025] фиг. 7 представляет собой схематическое изображение аппаратной схемы блока электрического управления устройства для доставки лекарственных препаратов согласно некоторым аспектам изобретения;
[0026] фиг. 8 представляет собой изображение поперечного разреза устройства для доставки лекарственных препаратов с измерительной системой, основанной на изменениях магнитного поля, согласно некоторым аспектам изобретения;
[0027] фиг. 9 представляет собой изображение поперечного разреза устройства для доставки лекарственных препаратов с измерительной системой, основанной на изменениях емкости, согласно некоторым аспектам изобретения;
[0028] фиг. 10 представляет собой изображение поперечного разреза устройства для доставки лекарственных препаратов с измерительной системой, основанной на изменениях вихревых токов, согласно некоторым аспектам изобретения;
[0029] фиг. 11 представляет собой схематическое изображение измерительной системы с резонатором согласно некоторым аспектам изобретения;
[0030] фиг. 12А представляет собой изображение в разрезе устройства для доставки лекарственных препаратов с измерительной системой в первом геометрическом исполнении согласно некоторым аспектам изобретения; и
[0031] фиг. 12B представляет собой изображение в разрезе устройства для доставки лекарственных препаратов с измерительной системой во втором геометрическом исполнении согласно некоторым аспектам изобретения.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0032] Все опубликованные работы, патентные заявки, патенты и другие источники, упомянутые в данном документе, включены в полном объеме посредством ссылки. Кроме того, материалы, способы и примеры, рассматриваемые в данном документе, являются исключительно иллюстративными и не предусматриваются в качестве ограничивающих.
[0033] В графических материалах аналогичные номера позиций обозначают идентичные или соответствующие элементы на нескольких изображениях. Кроме того, в контексте данного документа термины, используемые в единственном числе, имеют значение «один или несколько», если не указано иное. Графические материалы в целом выполнены не в масштабе, если не указано иное или на них не представлены иллюстративные схематические конструкции или блок-схемы.
[0034] Для повышения точности измерения применяемой субстанции использовались устройства для доставки лекарственных препаратов, основанные на механических и/или электромеханических системах, в том числе шприцевые инфузионные насосы. Хотя такие устройства для доставки лекарственных препаратов пригодны к применению, они демонстрируют многочисленные недостатки. А именно, в таких устройствах доставки лекарственных препаратов определение количества выполняется с помощью электромеханических измерительных систем, например электрических шаговых двигателей, тахометров, датчиков скорости или тому подобного, которые приводят шприцы в действие с небольшим и фиксированным шагом, что может приводить в результате к измерению количества доставляемой субстанции. В то же время такие системы могут быть громоздкими, тяжелыми и требовать подключения к электросети, что делает их непрактичными для применения в полевых условиях, например при вакцинации сельскохозяйственных животных или в других случаях применения лекарственных препаратов. Кроме того, такие системы могут быть чрезмерно расходными, поскольку электромеханические измерительные системы, на которых они основаны, могут быть дорогостоящими в изготовлении. Более того, такие системы могут требовать применения специальных шприцев и/или модифицирования уже имеющихся шприцев.
[0035] Устройство для доставки лекарственных препаратов по данному изобретению выполняет определение количества доставляемой субстанции, основанное на индуктивных взаимодействиях по определению местоположения поршня, выталкивающего субстанцию.
[0036] Устройство для доставки лекарственных препаратов по данному изобретению предоставляет многочисленные преимущества по сравнению с другими системами. Например, устройство для доставки лекарственных препаратов выполняет определение количества доставляемой субстанции, которое является внешним, неинвазивным и не требует контакта с субстанцией для доставки, а следовательно, не оказывает влияния на субстанцию, например, устройство не нагревает, не обесцвечивает и/или не загрязняет субстанцию для доставки. В другом примере раскрытое устройство для доставки лекарственных препаратов выполняет определение количества доставляемой субстанции, не зависящее от физических характеристик субстанции, например цвета, прилипания к поверхности и загрязнения, и которое может быть интегрировано в традиционные дозирующие устройства, например шприцы, без модифицирования или с ограниченным модифицированием.
[0037] Фиг. 1А-1В представляют собой аксонометрическое изображение и изображение поперечного разреза устройства 1000 для доставки лекарственных препаратов согласно некоторым аспектам изобретения.
[0038] Устройство 1000 для доставки лекарственных препаратов может содержать держатель A-1000, дозирующее устройство B-1000, установленное на держателе A-1000, и измерительную систему C-1000, закрепленную вдоль дозирующего устройства B-1000.
[0039] Дозирующее устройство B-1000 может отбирать, удерживать и/или выпускать субстанцию 10 для введения в объект 20, см. фиг. 5, например, сельскохозяйственное животное, в том числе свинью, среди прочих. Субстанция 10 может вводиться в объект 20 для подачи питания, санации, лечения, предотвращения, диагностирования заболевания, проведения тестирования и/или эвтаназии, или в общем случае для влияния на состояние здоровья объекта 20 и представлять собой лекарственный препарат, антибиотик, вакцину, смесь питательных веществ или любые фармацевтические продукты. Субстанция 10 может находиться в виде жидкости, газа и/или взвеси твердых частиц в жидкости.
[0040] Измерительная система C-1000 может выполнять определение количества Qs субстанции, отбираемой и/или выпускаемой устройством 1000 для доставки лекарственных препаратов.
[0041] Держатель A-1000 может служить основанием для дозирующего устройства B-1000 и/или измерительной системы C-1000, а также эргономических элементов, например, рукоятки, спускового крючка, оттягивающего рычага или тому подобного, для ручного управления, транспортировки и/или управления пользователем работой устройства 1000 для доставки лекарственных препаратов.
[0042] Устройство 1000 для доставки лекарственных препаратов может выполнять определение количества субстанции 10, отбираемого и выпускаемого с помощью дозирующего устройства B-1000, при этом снижая до минимальных значений потребление ресурсов, например пространства, энергии и/или массы, выделяемых для определения количества субстанции 10, отбираемого и выпускаемого с помощью дозирующего устройства B-1000.
[0043] Такое определение количества субстанции 10, отбираемого и выпускаемого с помощью дозирующего устройства B-1000, выполняется на основании результатов количественного определения и/или измерения при бесконтактных взаимодействиях между дозирующим устройством B-1000 и измерительной системой C-1000.
[0044] Бесконтактные взаимодействия могут соответствовать любому типу взаимодействий, не требующих физического контакта между дозирующим устройством B-1000 и измерительной системой C-1000 для получения количественно измеряемых значений, зависящих от результатов определения количества субстанции 10, выпускаемого дозирующим устройством B-1000, а именно, основанных на перемещении поршня B-1200 дозирующего устройства B-1000.
[0045] В одном примере бесконтактные взаимодействия могут соответствовать изменениям величины индуктивного сопротивления, создаваемым подвижными частями дозирующего устройства B-1000 на катушках индуктивности измерительной системы C-1000 и/или на индуктивных датчиках измерительной системы C-1000, например индуктивных датчиках на основе линейного дифференциального трансформатора от компании Micro-Epsilon.
[0046] В другом примере бесконтактные взаимодействия могут соответствовать изменениям магнитного поля, создаваемых магнитом, прикрепленным к подвижным частям, и/или самими подвижными частями дозирующего устройства B-1000 на магнитных датчиках измерительной системы C-1000, например датчиках на эффекте Холла и/или вихретоковых датчиках от компании Micro-Epsilon.
[0047] В другом примере бесконтактные взаимодействия могут соответствовать магнитоиндукционным взаимодействиям, создаваемых магнитом, прикрепленным к подвижным частям дозирующего устройства B-1000, на магнитоиндукционных датчиках измерительной системы C-1000, например магнитоиндукционных датчиках перемещения от компании Micro-Epsilon.
[0048] В другом примере бесконтактные взаимодействия могут соответствовать звуковым взаимодействиям, создаваемым микроволновым излучением, исходящим из измерительной системы C-1000, и подвижными частями дозирующего устройства B-1000, отражающими микроволновое излучение обратно в измерительную систему C-1000 с величинами фазового сдвига, зависящими от положения подвижных частей.
[0049] В другом примере бесконтактные взаимодействия могут соответствовать оптическим взаимодействиям между световым излучением, исходящим из измерительной системы C-1000, и оптическими маркерами, например светоотражателями, расположенными на подвижных частях дозирующего устройства B-1000, отражающими световое излучение обратно в измерительную систему C-1000 с углами отражения, зависящими от положения подвижных частей.
[0050] В другом примере бесконтактные взаимодействия могут соответствовать оптическим взаимодействиям между световым излучением, исходящим наружу из измерительной системы C-1000 и направленным на объект. Например, световое излучение, исходящее из измерительной системы C-1000, может иметь известные свойства, в том числе, среди прочего, угол излучения в сторону объекта. Указанный угол излучения может быть определен во взаимосвязи с углом приема, определяемым при приеме измерительной системой C-1000 отраженного исходящего светового излучения. В одном примере исходящее световое излучение представляет собой инфракрасное световое излучение, а отраженное световое излучение отражается объектом или, например, животным. Определяя изменение угла излучения на основании величины угла приема, может быть рассчитан угол, под которым игла B-1800 и, в широком смысле, дозирующее устройство B-1000 входят в контакт с объектом. В результате сравнения указанного расчетного контактного угла с определенным уровнем допуска, предполагаемым например, на уровне сервера, в качестве пригодного для выполнения качественных инъекций, пользователю дозирующего устройства B-1000 может быть передан сигнал сообщения о возможном в данном случае ненадлежащем значении контактного угла и неэффективном введении субстанции. В другом примере в результате установления ненадлежащего контактного угла дозирующий механизм B-1000 может быть деактивирован. В таком случае управление исполнительным элементом дозирующего устройства B-1000 может осуществляться таким образом, чтобы выталкивание им субстанции происходило только в том случае, когда значение контактного угла находится в приемлемом диапазоне. Вышеописанные процессы измерения и вычисления могут быть выполнены аппаратными средствами, описанными во взаимосвязи с измерительной системой C-1000 по фиг. 2 или в целом представленными на фиг.5.
[0051] Дозирующее устройство B-1000 может содержать цилиндр B-1100, поршень B-1200, установленный с возможностью скользящего перемещения внутри цилиндра B-1100, шток B-1300 шприца, соединенный с поршнем B-1200 и частично выступающий из цилиндра B-1100, отверстие B-1400, расположенное напротив поршня B-1200, и простой наконечник B-1500, выступающий из отверстия B-1400.
[0052] Шток B-1300 шприца может быть приведен в движение с возможностью скользящего перемещения поршня B-1200 внутри цилиндра B-1100 по ходу L поршня в первом направлении, например, в сторону отверстия B-1400, выдавливания субстанции 10 через отверстие B-1400 и отверстие B-1400 и выпуска субстанции 10 из устройства 1000 для доставки лекарственных препаратов или во втором направлении, например, в сторону от отверстия B-1400, с возможностью втягивания субстанции 10 через отверстие B-1400 и отбора субстанции 10 из внешней среды.
[0053] Приведение в движение штока B-1300 шприца может выполняться пользователем вручную или автоматически с помощью электрического исполнительного механизма, например, электрического двигателя, вращающего ходовой винт, который выдвигает и/или втягивает шток B-1300 шприца, и/или гидравлического и/или пневматического исполнительного механизма, например, с помощью сжатого газа, который выдвигает и/или втягивает шток B-1300 шприца. Согласно варианту реализации изобретения приведением в движение электрического исполнительного механизма может управлять электрическая схема для обработки данных, установленная в устройство 1000 для доставки лекарственных препаратов и запрограммированная для управления запуском электрического исполнительного механизма в случае выполнения предварительно заданных условий. Типизированные полностью совместимые схемы для обработки данных могут содержаться в блоке электрического управления или в дополнительном блоке электрического управления. Кроме этого, полностью совместимые схемы для обработки данных могут содержаться на удаленном сервере (например, сервере (и в базе данных)), тем самое осуществляя дистанционное управление дозирующим устройством B-1000 устройства 1000 для доставки лекарственных препаратов в соответствии с передаваемыми данными.
[0054] Цилиндр В-1100 может быть изготовлен из химически стойких и электроизолирующих материалов, в том числе стекла, керамики, и/или полимерных смесей, например, полиэтиленовых смесей, для предотвращения возникновения индуктивных взаимодействий между цилиндром B-1100 и измерительной системой С- 1000.
[0055] Поршень B-1200 может быть изготовлен из химически стойких и электропроводящих материалов, в том числе сплавов нержавеющей стали и/или других металлических сплавов, для осуществления индуктивных взаимодействий между поршнем B-1200 и измерительной системой C-1000.
[0056] В альтернативном варианте реализации поршень B-1200 может быть изготовлен из изолирующих материалов, например полимерных смесей, но на поршне B-1200 может быть закреплен или в нем может быть заключен маркер B-1210 индуктивности, выполненный из электропроводящих материалов, для осуществления индуктивных взаимодействий между маркером индуктивности B-1210 и измерительной системой C-1000
[0057] Отверстие B-1400 может быть выполнено с возможностью установки иглы B-1800 для содействия выполнению введения и/или отбора субстанции 10 в и/или из объекта 20.
[0058] Кроме того, отверстие B-1400 может содержать ввод B-1600, соединяемый с трубопроводом B-1700 для объединения вспомогательной субстанции с субстанцией 10.
[0059] Фиг. 2 представляет собой схематическое изображение измерительной системы C-1000 устройства 1000 для доставки лекарственных препаратов согласно некоторым аспектам изобретения.
[0060] Измерительная система C-1000 может содержать цепь C-1300 электропитания, антенну C-1100, закрепленную вдоль цилиндра B-1100 и имеющую электрическое соединение с цепью электропитания C-1300, электрическую схему C-1400 получения данных, имеющую электрическое соединение с антенной C-1100, и блок C-1200 электрического управления, имеющий электрическое соединение со схемой C-1400 получения данных.
[0061] Цепь электропитания С-1300 может подавать на антенну С-1100 входные сигналы Is, антенна С-1100 может принимать входные сигналы и создавать электромагнитное поле M в соответствии с входными сигналами, электромагнитное поле М может взаимодействовать с поршнем B-1200 дозирующего устройства B-1000 и может приводить к созданию антенной C-1100 одного или несколько сигналов обратной связи Os в соответствии с положением X поршня и/или изменением положения вдоль хода L поршня, электрическая схема C-1400 получения данных может считывать один или несколько сигналов Os обратной связи и выдавать значения физических величин одного или нескольких сигналов Os обратной связи, а блок C-1200 электрического управления может принимать значения физических величин и посредством программных команд выдавать значения положения X поршня.
[0062] Например, входные сигналы Is могут представлять собой колебания тока, создаваемыми индуктивно-емкостным контуром цепи электропитания, а один или несколько сигналов Os обратной связи могут представлять собой наведенные токи, характеризующимися величиной резонансной частоты Fr, зависящей от положения X поршня вдоль хода L поршня.
[0063] В альтернативном варианте реализации дозирующее устройство B-1000, содержащее поршень B-1200 и/или маркер B-1210 индуктивности, может иметь магнитную проницаемость значительно меньшую, чем магнитная проницаемость субстанции 10, для создания с помощью антенны C-1100 и/или цепи электропитания C-1300 достаточно большой амплитуды электромагнитного поля M для преимущественного взаимодействия с субстанцией 10 по сравнению со взаимодействием с поршнем B-1200 и/или маркером индуктивности B-1210.
[0064] Согласно варианту реализации изобретения вышеописанные методы определения положения поршня B-1200, например, могут быть также использованы для определения количества дозируемой субстанции 10 и, следовательно, для выдачи сообщения о том, что дозируемое количество равно, меньше чем или больше чем заданная дозировка. Например, в случае, когда положение поршня B-1200, установленное измерительной системой C-1000, меньше чем заданное положение поршня, что в результате приводит к недостаточной дозировке для объекта или животного, может быть выдано сообщение о том, что предлагается дополнительное количество субстанции 10 или, например, антибиотика. В дополнительном варианте реализации в этом случае управляющий сигнал (от локальной или удаленной электрической схемы для обработки данных) может быть отправлен на дозирующее устройство B-1000 для продолжения дозирования антибиотика до момента совпадения его количества с заданной дозировкой. В другом примере, в случае, когда положение поршня B-1200, установленное измерительной системой C-1000, равно положению, соответствующему заданной дозировке субстанции 10, может быть выдано сообщение с подтверждением дозирования надлежащего количества субстанции 10. Аналогично вышеупомянутому, в случае, когда совпадение с заданной дозировкой устанавливают до момента завершения процесса дозирования, на дозирующее устройство B-1000 может быть отправлен управляющий сигнал для отключения электрического исполнительного механизма. Заданная дозировка может быть установлена на основании объекта и идентификационных данных субстанции. Такие данные подробно описаны с использованием фиг.5.
[0065] Электрическая схема C-1400 получения данных может представлять собой электрическую схему любого типа, выполненную с возможностью приема электрических сигналов и выдачи значений физических величин, характеризующих электрические сигналы, в том числе интенсивности, напряжения и/или частоты. Например, электрическая схема C-1400 получения данных может представлять собой плату LDC1612EVM производства компании Texas Instruments или аналогичную электрическую схему.
[0066] Кроме того, измерительная система С-1000 может содержать фильтр C-1500 шумов для частичного уменьшения внешних и/или внутренних электрических помех, например, от электрического исполнительного механизма штока B-1300, и повышения точности определения количества субстанции 10. Фильтр C-1500 шумов может представлять собой любой тип активного или пассивного фильтра шумов. Например, шумовой фильтр может представлять собой ферритовые шарики, размещенные на электрических соединениях между элементами измерительной системы C-1000, например, антенной C-1100, цепью C-1300 электропитания, электрической схемой C-1400 получения данных и/или блоком C-1200 электрического управления и заземляющим соединением между электрической схемой C-1400 получения данных и дозирующим устройством B-1000.
[0067] Кроме того, измерительная система С-1000 и/или другие элементы устройства 1000 для доставки лекарственных препаратов, например держатель А-1000 и/или дозирующее устройство В-1000, могут содержать другие конструктивные элементы и/или детали для частичного уменьшения и/или устранения помех, которые могут влиять на определение количества субстанции 10, например, колебания комнатной температуры и/или температуры окружающей среды, внешние поля, создаваемые окружающими объектами, животными и/или частями тел, и/или любые другие типы помех, создаваемых за счет механических и/или электрических взаимодействий. Например, измерительная система C-1000 может содержать датчики T-1000 температуры, например терморезисторы, которые выдают сигналы Ts температуры в соответствии с температурой окружающей среды, как показано на фиг. 2, а блок C-1200 электрического управления может быть также выполнен с возможностью приема сигналов температуры и сигналов Os обратной связи и вычисления положения X поршня B-1200 на основании сигналов температуры и сигналов Os обратной связи.
[0068] В другом примере датчики T-1000 температуры могут использоваться для достижения максимальной терапевтической эффективности субстанции или, например, антибиотика. Например, измерительная система C-1000 может содержать датчики T-1000 температуры (например, терморезисторы), которые выдают сигналы Ts температуры в соответствии с температурой окружающей среды или температурой антибиотика в дозирующем устройстве B-1000. Блок C-1200 электрического управления может быть также выполнен с возможностью приема сигналов температуры и сигналов Os обратной связи и определения из них, например, терапевтической эффективности антибиотика.
[0069] Например, в некоторых случаях может быть известно, что в помещении для животных существует повышенная температура окружающей среды, и в результате животные или объекты могут иметь повышенную температуру тела. Повышение температуры тела животных может приводить к повышению уровней стресса и оказывать негативное влияние на терапевтическую эффективность антибиотика. Вследствие этого, в случае установления такого факта, пользователю может быть выдано сообщение, а температура в помещении может быть автоматически изменена. Кроме того, электрическая схема для обработки данных может быть выполнена с возможностью отправки управляющего сигнала на дозирующее устройство B-1000 для отключения электрического исполнительного механизма и надежной блокировки устройства 1000 для доставки лекарственных препаратов от введения любой субстанции или, например, антибиотика.
[0070] В другом примере датчики T-1000 температуры могут быть использованы для определения температуры субстанции или, например, антибиотика в дозирующем устройстве B-1000 измерительной системы C-1000, тем самым выполняя определение температуры антибиотика в рамках требований к хранению и транспортировке антибиотика. Например, если температура антибиотика в дозирующем устройстве B-1000 возрастает выше допустимого значения, что соответствует падению терапевтической эффективности антибиотика, может быть выдано сообщение с тем, чтобы антибиотик мог быть заменен. Кроме того, электрическая схема для обработки данных может быть выполнена с возможностью отправки управляющего сигнала на дозирующее устройство B-1000 для отключения электрического исполнительного механизма.
[0071] В другом примере измерительная система С-1000 может содержать экран, расположенный на задней части антенны С-1100 для защиты антенны C-1100 от внешних полей. В другом примере блок C-1200 электрического управления может быть также выполнен с возможностью выполнения калибровки и/или учета неточностей, связанных с механическими и/или электрическими взаимодействиями, например люфтом между поршнем B-1200 и цилиндром B-1100, неточностей в считываемых значениях индуктивности или тому подобного.
[0072] В альтернативном варианте реализации бесконтактные взаимодействия могут соответствовать изменениям величины магнитного поля, а определение количества вещества 10 может быть выполнено посредством измерения изменений величины магнитного поля, как показано на фиг. 8.
[0073] Например, дозирующее устройство B-1000 может содержать магнитный маркер M-1210, например магнит, закрепленный на поршне B-1200 и ориентированный вдоль оси поляризации, например, в направлении север-юг, как показано на фиг.8, по сути соосно с ходом L поршня, а измерительная система C-1000 может содержать совокупность магнитных датчиков M-1100, например, датчиков на эффекте Холла, магнитоиндукционных датчиков от компании Micro-Epsilon, расположенных вдоль хода L поршня и/или на оси, по сути перпендикулярной оси поляризации магнитного маркера M-1210.
[0074] Магнитный маркер М-1210 может генерировать силовые линии М-1000 магнитного поля, которые перемещаются при перемещении маркера М-1210 вдоль хода L поршня, при этом совокупность магнитных датчиков М-1100 может воспринимать силовые линии М-1000 магнитного поля и выдавать совокупность сигналов Ms магнитного поля в соответствии с величинами напряженности магнитного поля. Совокупность сигналов Ms магнитного поля может приниматься электрической схемой C-1400 получения данных, а положение X поршня B-1200 может определяться с помощью программных команд, выполняемых блоком C-1200 электрического управления, как показано на фиг. 2.
[0075] Например, программные команды, выполняемые блоком C-1200 электрического управления, могут быть записаны для определения положения X поршня B-1200 на основании совокупности сигналов Ms магнитного поля посредством дифференциальных методов измерения, которые направлены на определение частей с линейными характеристиками для каждого сигнала магнитного поля из совокупности сигналов Ms магнитного поля. Такие дифференциальные методы измерения могут приводить к снижению погрешности измерений, связанной с колебаниями температуры и/или влажности.
[0076] В альтернативном варианте реализации бесконтактные взаимодействия могут соответствовать изменениям величины емкости, а определение количества вещества 10 может быть выполнено посредством измерения изменений величины емкости, как показано на фиг. 9.
[0077] Например, дозирующее устройство B-1000 может содержать подвижный электрод N-1210, закрепленный на поршне B-1200, и совокупность неподвижных электродов N-1110, расположенных вдоль хода L поршня.
[0078] Совокупность неподвижных электродов N-1110 может выдавать совокупность емкостных сигналов Mc в соответствии с величиной емкости между подвижным электродом N-1210 и совокупностью неподвижных электродов N-1110.
[0079] Совокупность неподвижных электродов N-1110 может иметь электрическое соединение между собой, в результате чего совокупность неподвижных электродов N-1110 выдает каждый емкостный сигнал из совокупности емкостных сигналов Mc синусоидальной формы с заданной разностью фаз между ними, составляющей ϕ, как показано на фиг. 9. Например, совокупность неподвижных электродов N-1110 может иметь электрическое соединение с образованием двух наборов электродов и иметь заданную разность фаз ϕ, по сути равную 180°, для дальнейшего повышения точности измерения положения X поршня B-1200, как показано на фиг. 9.
[0080] Емкостные сигналы Mc могут приниматься электрической схемой C-1400 получения данных, а положение X поршня B-1200 может определяться с помощью программных команд, выполняемых блоком C-1200 электрического управления.
[0081] В альтернативном варианте реализации бесконтактные взаимодействия могут соответствовать изменениям величины вихревого тока, а определение количества вещества 10 может быть выполнено посредством измерения изменений величины вихревого тока, как показано на фиг. 10.
[0082] Например, дозирующее устройство B-1000 может содержать проводящую мишень E-1210, металлическую часть, закрепленную на поршне B-1200, и совокупность катушек-датчиков E-1110, расположенных вдоль хода L поршня. Совокупность катушек-датчиков E-1110 может принимать сигнал переменного тока от цепи C-1300 электропитания и совокупность катушек-датчиков E-1110 может создавать переменное магнитное поле, образующее в проводящих мишенях E-1210 вихревые токи, вызывающее противодействующее магнитное поле. Совокупность катушек-датчиков E-1110 может выдавать сигналы Mfd обратной связи в соответствии с величиной взаимодействий между магнитным полем, создаваемым совокупностью катушек-датчиков E-1110 и противодействующим магнитным полем.
[0083] Сигналы обратной связи могут приниматься электрической схемой C-1400 получения данных, а положение X поршня B-1200 может определяться с помощью программных команд, выполняемых блоком C-1200 электрического управления.
[0084] В альтернативном варианте реализации проводящая мишень E-1210 может быть заменена резонатором E-1220, на который подается энергия магнитного поля, создаваемого совокупностью катушек-датчиков E-1110, и который, в свою очередь, входит в состояние резонанса с совокупностью катушек E-1110 с образованием коэффициента связи между резонатором E-1220 и совокупностью катушек-датчиков E-1110, как показано на фиг. 11.
[0085] Кроме того, измерительная система C-1000 может содержать электрическую схему E-1320 датчика, например косинусную катушку-датчик (KCOS) и/или синусную катушку-датчик (KSIN), как показано на рис. 11, которые являются датчиками величины коэффициента связи между резонатором E- 1220 и совокупностью катушек-датчиков E-1110.
[0086] Различные элементы блока C-1200 электрического управления, а также их взаимодействие и функциональные возможности описаны более подробно в нижеследующих разделах.
[0087] Фиг. 3 представляет собой изображение с пространственным разделением деталей антенны C-1100 устройства 1000 для доставки лекарственных препаратов согласно некоторым аспектам изобретения.
[0088] Антенна C-1100 может представлять собой плату с печатным монтажом с многослойной структурой, содержащей совокупность последовательно установленных друг на друга слоев C-1110, которая служит основой для совокупности наборов катушек C-1120 индуктивности.
[0089] Например, антенна C-1100 может содержать первый слой C-1112 с первым набором катушек C-1122 индуктивности, второй слой C-1114 со вторым набором катушек C-1124 индуктивности, третий слой C-1116 с третьим набором катушек C-1126 индуктивности и четвертый слой C-1118 с четвертым набором катушек C-1128 индуктивности.
[0090] Первый, второй, третий и четвертый наборы катушек C-1122, C-1124, C-1126, C-1128 индуктивности могут быть расположены вдоль хода L поршня, иметь между собой электрическое соединение и находиться на заданном расстоянии Do взаимного удаления так, что каждый сигнал обратной связи из одного или нескольких сигналов Os обратной связи соответствует положению X поршня B-1200 на определенном участке хода L поршня.
[0091] Например, первый, второй, третий и четвертый наборы катушек C-1122, C-1124, C-1126, C-1128 индуктивности могут иметь попарное электрическое соединение через цепь C-1300 электропитания и находиться на расстоянии в половину длины для выдачи первого сигнала Os1 обратной связи и второго сигнала Os2 обратной связи, при этом первый сигнал Os1 обратной связи соответствует положению X поршня в первой половине хода L поршня, в то время как второй сигнал Os2 обратной связи соответствует положению X поршня во второй половине хода L поршня.
[0092] Антенна С-1100 может иметь варианты геометрической компоновки, например форму и/или расположение, для повышения точности измерения количества Qs субстанции, отбираемого и/или выпускаемого с помощью устройства 1000 для доставки лекарственного препарата.
[0093] В первом варианте компоновки, как показано на фиг. 12А, антенна С-1100 может иметь прямоугольную форму и по сути жесткую структуру, и располагаться по касательной к наружной поверхности В-1110 цилиндра В-1100, например, для уменьшения до минимального значения расстояния между антенной C-1100 и поршнем B-1200.
[0094] Во втором варианте компоновки, как показано на фиг. 12B, антенна С-1100 может иметь прямоугольную форму и по сути гибкую и/или полугибкую структуру, повторяющую форму наружной поверхности В-1110 цилиндра, например, для уменьшения до минимального значения расстояния между антенной C-1100 и поршнем B-1200 и увеличения до максимального значения амплитуды сигналов Os обратной связи.
[0095] В соответствии с вышеизложенными принципами изобретения возможны многочисленные модификации и варианты исполнения представленных выше вариантов геометрической компоновки антенны C-1100. В результате этого следует понимать, что антенна C-1100 может иметь другие варианты компоновки, отличные от конкретно описанных в данном документе.
[0096] Кроме того, как показано на фиг. 1А, антенна C-1100 может быть установлена на заданном расстоянии db от цилиндра B-1100, достаточно малом для увеличения до максимального значения амплитуды сигналов Os обратной связи, но достаточно большом для возможности использования надлежащей толщины для стенки цилиндра B-1100 и/или установки измерительной системы C-1000 внутри корпуса. Например, заданное расстояние может составлять от 1 мм до 10 мм, и предпочтительно от 2 мм до 5 мм.
[0097] Фиг. 4A-4G представляют собой схематические изображения первого, второго, третьего, четвертого, пятого, шестого и седьмого типового варианта компоновки катушек индуктивности антенны C-1100 согласно некоторым аспектам изобретения;.
[0098] Совокупность наборов катушек C-1120 индуктивности может иметь варианты компоновки катушек индуктивности для выдачи одного или нескольких сигналов Os обратной связи с заданными характеристиками анализа сигналов, которые повышают точность определения значений положения X поршня, извлекаемых с помощью блока C-1200 электрического управления из одного или нескольких сигналов Os обратной связи посредством выполнения программных команд.
[0099] К вариантам компоновки катушек индуктивности может относиться форма катушки индуктивности, продольное расположение катушек индуктивности, поперечное расположение катушек индуктивности и/или направление намотки, в то время как к заданным характеристикам анализа сигналов может относиться количество сигналов, условия биективности и/или изменение амплитуды сигнала как функции положения X поршня.
[00100] Форма катушки индуктивности может быть квадратной, как показано на фиг. 4B-4C для третьего и четвертого наборов катушек C-1126 и C-1128 индуктивности, прямоугольной, как показано на фиг. 4А-4С для первого и второго наборов катушек С-1122 и С-1124 индуктивности, круглой, как показано на фиг. 4E-4F для первого, второго, третьего и четвертого наборов катушек C-1122, C-1124, C-1126 и C-1128 индуктивности и/или овальной, как показано на фиг. 4D для первого, второго, третьего и четвертого наборов катушек C-1122, C-1124, C-1126 и C-1128 индуктивности.
[00101] Расположение катушек индуктивности в продольном направлении может быть последовательным, как показано на фиг. 4A-4E для первого и второго наборов катушек C-1122 и C-1124 индуктивности или попарным и однорядным, как показано на фиг. 4A-4C для третьего и четвертого наборов катушек C-1126 и C-1128 индуктивности.
[00102] Расположение катушек индуктивности в поперечном направлении может выполняться в один ряд, при этом две последовательно установленные катушки индуктивности по сути установлены в ряд одна над другой, как показано на фиг. 4A-4C для первого и второго наборов катушек C-1122 и C-1124 индуктивности или со сдвигом, при этом две последовательно установленные катушки индуктивности смещены относительно друг друга, например на половину длины, как показано на фиг. 4D-4E для первого и второго наборов катушек C-1122 и C-1124 индуктивности.
[00103] Направление намотки может быть выполнено по часовой стрелке, как показано на фиг. 4A-4F для первого набора катушек C-1122 индуктивности или против часовой стрелки, как показано на фиг. 4A-4F для второго набора катушек C-1124 индуктивности, в случае последовательно расположенных катушек индуктивности, с одинаковым направлением намотки, как показано на фиг. 4F для первого и третьего наборов катушек C-1122 и C-1126 индуктивности, с противоположным направлением намотки, как показано на фиг. 4A-4C для третьего и четвертого наборов катушек C-1126 и C-1128 индуктивности в случае попарного расположения катушек индуктивности.
[00104] В 7-м варианте компоновки для совокупности наборов катушек C-1120 индуктивности первый, второй, третий и четвертый наборы катушек C-1122, C-1124, C-1126 и C-1128 индуктивности могут иметь противоположное направление намотки и однорядное расположение, и быть установлены одна над другой для ограничения помех внутри совокупности наборов катушек C-1120 индуктивности.
[00105] В соответствии с вышеизложенными принципами изобретения возможны многочисленные модификации и варианты исполнения представленных выше вариантов компоновки антенны C-1100. В результате этого следует понимать, что катушки индуктивности антенны C-1100 могут иметь другие варианты компоновки, отличные от конкретно описанных в данном документе.
[00106] Фиг. 5 представляет собой схематическое изображение системы D-1000 слежения устройства 1000 для доставки лекарственных препаратов согласно некоторым аспектам изобретения.
[00107] Устройство 1000 для доставки лекарственных препаратов может содержать систему D-1000 слежения для извлечения, хранения и передачи ключевой информации K, связанной с применением устройства 1000 для доставки лекарственных препаратов.
[00108] Система D-1000 слежения может содержать идентификатор D-1100 объекта, идентификатор D-1200 субстанции, сетевой контроллер D-1300 и вспомогательный блок D-2000 электрического управления, связанный с возможностью обмена данными (с использованием проводной или беспроводной связи) с каждым из идентификатора D-1100 объекта, идентификатора D-1200 субстанции, сетевого контроллера D-1300 и электрической схемы C-1400 получения данных измерительной системы C-1000.
[00109] Идентификатор D-1100 объекта может представлять собой любое устройство, выполненное с возможностью определения маркера D-1110 объекта и выдачи на вспомогательный блок D-2000 электрического управления сигналов TI идентификации объекта в соответствии с идентификационными данными объекта 20. Например, маркер D-1110 объекта может представлять собой чип радиочастотной идентификации (RFID, Radio Frequency Identification), использующий стандарт ближней радиосвязи (NFC, Near-Field Communication) и/или системы ультравысоких частот (UHF, Ultra High Frequency), а идентификатор D-1100 объекта может представлять собой считыватель меток RFID.
[00110] Маркер D-1110 объекта может быть размещен на ушной бирке, шейной бирке, лодыжечной бирке и/или брюшном болюсе, прикрепленных к объекту 20.
[00111] Идентификационные данные объекта могут содержать любые данные, относящиеся к идентификации и отслеживанию объекта 20. Например, в том случае, когда объект 20 представляет собой животное, идентификационные данные объекта могут содержать идентификационный номер животного (AIN, Animal Identification Number), код животного, код стада, код отары, код идентификации объекта имущества (PIC, Property Identification Code) или тому подобное.
[00112] Согласно варианту реализации изобретения вышеописанные идентификационные данные объекта, сохраненные локально на животном с помощью чипа RFID, например, могут быть приняты в качестве сигнала TI идентификации объекта и обработаны вспомогательным блоком D-2000 электрического управления (или аналогичной электрической схемой для обработки данных), например, для установления совпадения полученных идентификационных данных объекта с ожидаемыми идентификационными данными. На основании такого совпадения или его отсутствия вспомогательный блок D-2000 электрического управления (или аналогичный ему) может создавать соответствующее сообщение для фермера. В альтернативном варианте реализации электрическая схема для обработки данных может отправлять управляющий сигнал на дозирующее устройство B-1000 для отключения электрического исполнительного механизма. Ожидаемые идентификационные данные животного могут содержать, среди прочего, AIN. Например, фермер готовится ввести субстанцию в рассматриваемое животное. Если рассматриваемое животное, которому намереваются вводить антибиотик, имеет AIN, равный 91, в то время как, согласно записям фермера и данным, полученным с сервера (и базы данных) D-1500 или через сеть D-1400, ожидаемое значение AIN рассматриваемого животного должен составлять 36, может быть выдано сообщение об отсутствии совпадения между ожидаемыми идентификационными данными и рассматриваемыми идентификационными данными объекта, и может быть отправлен управляющий сигнал для отключения электрического исполнительного механизма. В другом примере вспомогательный блок D-2000 электрического управления или аналогичный ему, по согласованию через сеть D-1400 с сервером (и базой данных) D-1500 выполняет регистрацию идентификационных данных животных, прошедших недавнюю санацию, так что позже может быть сделан запрос на получение указанных зарегистрированных данных. В результате этого с помощью перекрестной ссылки на последние зарегистрированные данные можно избежать проведения нескольких санаций одного животного. Например, в случае установления вспомогательным блоком D-2000 электрического управления совпадения между идентификационными данными подлежащего санации животного и идентификационными данными из недавней регистрации в устройстве хранения данных, может быть создано сообщение и выполнено отключение электрического исполнительного механизма, чтобы избежать повторной санации животного.
[00113] Идентификатор D-1200 субстанции может представлять собой любое устройство, выполненное с возможностью определения маркера D-1210 субстанции и выдачи на вспомогательный блок D-2000 электрического управления сигналов Sis идентификации субстанции в соответствии с идентичностью субстанции. Например, маркер D-1210 субстанции может представлять собой чип радиочастотной идентификации (RFID), использующий стандарт ближней радиосвязи (NFC) и/или системы ультравысоких частот (UHF), а идентификатор D-1200 субстанции может представлять собой считыватель меток RFID.
[00114] В другом примере маркер D-1210 субстанции может представлять собой штрих-код, а идентификатор D-1200 субстанции может представлять собой сканер штрих-кода, как показано на фиг. 5. Маркер D-1210 субстанции может быть размещен на емкости, например бутылке или кармане, содержащем субстанцию 10.
[00115] Идентификационные данные субстанции могут содержать любые данные, относящиеся к идентификации и отслеживанию субстанции 10. Например, в том случае, когда объект 20 представляет собой лекарственный препарат, идентификационные данные субстанции могут содержать идентификационный номер лекарственного препарата (DIN, Drug Identification Number), код производственной партии или тому подобное.
[00116] Согласно варианту реализации изобретения идентификационные данные субстанции, в том числе, среди прочего, код производственной партии, могут обрабатываться вспомогательным блоком D-2000 электрического управления для определения даты изготовления субстанции 10 или, например, антибиотика, и даты истечения срока годности субстанции 10. Например, если было установлено, что рассматриваемая дата заявленной санации превышает или близка к дате истечения срока годности антибиотика, как было определено из кода производственной партии, может быть создано сообщение о том, что активность, а следовательно, пригодность субстанции 10 может ухудшаться, и антибиотик не должен применяться. Вместе с тем электрическая схема для обработки данных может отправлять управляющий сигнал для отключения электрического исполнительного механизма дозирующего устройства B-1000.
[00117] В отличие от вышеописанного локального применения идентификационной информации субстанции, согласно другому варианту реализации изобретения идентификационные данные субстанции, в том числе, помимо прочего, код производственной партии, могут рассматриваться во взаимосвязи с глобальными данными, собираемыми через сеть D-1400 на сервере (и в базе данных) D-1500. Такие глобальные данные могут содержать, например, информацию с других ферм, относящуюся к терапевтической эффективности субстанции 10 или к связанным с ней проблемам животных. В примере, в котором субстанция 10 представляет собой антибиотик, можно предположить, что между получением местным фермером антибиотика и введением антибиотика его животным может пройти время, в течение которого бактерия может видоизмениться и стать резистентной к антибиотику. Резистентность может быть установлена посредством оценки данных, собранных на сервере (и в базе данных) D-1500 от других фермеров, указывающих на то, что животные на указанных фермах стали жертвой болезни. В результате этого при подготовке местного фермера к введению антибиотика своим животным может быть создано сообщение, информирующее местного фермера о том, что антибиотик уже не является эффективным для лечения конкретного заболевания. Кроме того, электрическая схема для обработки данных может отправлять управляющий сигнал, выполняющий отключение электрического исполнительного механизма дозирующего устройства B-1000. Например, идентификационные данные субстанции, в том числе код производственной партии, могут обрабатываться вспомогательным блоком D-2000 электрического управления или аналогичным устройством и сравниваться с данными, собранными на сервере (и в базе данных) D-1500. Если антибиотик был помечен как запрещенный в пределах определенного географического региона или для определенной породы животных, может быть создано сообщение, информирующее местного фермера о том, что для эффективной защиты антибиотиком его/ее животных требуется другой антибиотик. Аналогично вышеописанному случаю одновременно может быть выполнено отключение электрического исполнительного механизма дозирующего устройства B-1000.
[00118] Согласно варианту реализации изобретения может выполняться совместная оценка идентификационных данных объекта и идентификационных данных субстанции. Например, в случае, когда разные антибиотики пригодны для разных животных, специфичные для каждого животного данные, могут храниться в чипе RFID или аналогичном устройстве для того, чтобы в начале процесса санации требуемый для конкретного животного антибиотик, установленный на основании идентификационных данных субстанции, можно было сравнивать с идентификационными данными субстанции для соблюдения условий, при которых животное получает надлежащий антибиотик.
[00119] Сетевой контроллер D-1300 может представлять собой любую электрическую схему, выполненную с возможностью обмена через сеть D-1400 ключевой информацией K, например, идентификационными данными объекта, идентификационными данными субстанции и/или количеством Qs субстанции, вводимым в объект 20, между системой D-1000 слежения, сервером (и базой данных) D-1500 и электронным устройством D-1600.
[00120] Например, сетевой контроллер D-1300 может использоваться в качестве сетевой карты Intel Ethernet PRO от компании Intel Corporation of America для сопряжения с сетью D-1400. Понятно, что сеть D-1400 может представлять собой публичную сеть, например сеть Интернет, или частную сеть, например сеть LAN или WAN, или любое их сочетание, а также может содержать подсети PSTN или ISDN. Сеть D-1400 также может быть проводной, например сетью Ethernet, или может быть беспроводной, например сетью сотовой связи, в том числе сетью сотовой связи, содержащей беспроводные сотовые системы стандартов EDGE, 3G и 4G. Беспроводная сеть также может представлять собой сеть WiFi, Bluetooth или любой другой известный вид беспроводной связи.
[00121] В альтернативном варианте реализации сетевой контроллер D-1300 может быть интегрирован в вспомогательный блок D-2000 электрического управления, как показано на фиг. 6.
[00122] Сервер (и база данных) D-1500, в том числе электронная база данных, компьютер и/или автоматизированный сервер, сервер баз данных или любой сетевой узел, выполненный с возможностью хранения данных, может быть выполнен с возможностью хранения и/или предоставления доступа к ключевой информации K по применению устройства 1000 для доставки лекарственных препаратов.
[00123] Электронное устройство D-1600 может представлять собой компьютер, ноутбук, смартфон, планшет или подобное им устройство, которое способно хранить и отображать ключевую информацию K. Аналогичным образом электронное устройство D-1600 может быть выполнено с возможностью создания сообщений на основании сигналов, передаваемых от сервера (и базы данных) D-1500 через сеть D-1400, или ключевой информации K и результатов ее обработки, причем сообщение представляет собой одно или несколько из звукового сообщения, визуального сообщения, тактильного сообщения и тому подобного.
[00124] Согласно варианту реализации изобретения вышеописанные сообщения могут быть направлены фермеру или пользователю в результате управления электронным устройством D-1600 с помощью блока C-1200 электрического управления, вспомогательного блока D-2000 электрического управления, сервера (и базы данных) D-1500 и тому подобного.
[00125] Согласно варианту реализации изобретения вышеописанные управляющие сигналы (например, сигналы блокировки) могут быть направлены фермеру или пользователю в результате управления устройством 1000 для доставки лекарственных препаратов и/или электрическим устройством D-1600 с помощью блока C-1200 электрического управления, вспомогательного блока D-2000 электрического управления, сервера (и базы данных) D-1500 и тому подобного.
[00126] Вспомогательный блок D-2000 электрического управления может иметь функциональные возможности и конструктивные элементы, аналогичные блоку C-1200 электрического управления, или быть замененным на блок C-1200 электрического управления, и поэтому может применяться взаимозаменяемо для выполнения задач, описанных выше. Как блок C-1200 электрического управления, так и Вспомогательный блок D-2000 электрического управления более подробно описаны в нижеследующих разделах.
[00127] Согласно другому варианту реализации изобретения информация, получаемая устройством 1000 для доставки лекарственных препаратов во время введения субстанции, может храниться и/или обрабатываться локально (в устройстве 1000 для доставки лекарственных препаратов) или удаленно (на сервере (и в базе данных) D-1500) или в системе D-1000 слежения для осуществления продолжительной оценки здоровья животного (т.е. объекта). Например, для ретроспективной оценки здоровья животных могут передаваться и/или храниться локально или удаленно идентификационные данные объекта (например, AIN), полученные из чипа RFID, локального для животного, идентификационные данные субстанции (например, DIN), полученные из чипа RFID, локального для блока хранения субстанции, данные о количестве Qs вводимой субстанции согласно результатам измерений, выполненных измерительной системой C-1000 устройства 1000 для доставки лекарственных препаратов, а также другая информация, относящаяся к партии субстанции, дата введения, угол введения и дополнительные факторы окружающей среды. Например, в случае, когда субстанция представляет собой антибиотик, здоровье животного можно отслеживать во времени, начиная с момента введения антибиотика, и во взаимосвязи с факторами окружающей среды, зафиксированными на момент введения. Такое отслеживание во времени позволяет устанавливать возможную корреляцию состояния здоровья животных с конкретными показателями введения антибиотиков и в ряде случаев может создавать возможность прогнозирования состояния здоровья животных.
[00128] Фиг. 6 представляет собой блок-схему последовательности операций по способу управления устройством 1000 для доставки лекарственных препаратов согласно некоторым аспектам изобретения.
[00129] На этапе S100 идентификационные данные субстанции извлекают с помощью идентификатора D-1200 субстанции в результате выполнения программных команд в блоке C-1200 электрического управления и/или вспомогательном блоке D-2000 электрического управления.
[00130] Например, идентификатор D-1200 субстанции может считывать маркер D-1210 субстанции и в соответствии с идентификационными данными субстанции передавать сигналы считывания субстанции в блок C-1200 электрического управления и/или вспомогательный блок D-2000 электрического управления.
[00131] Кроме того, идентификационные данные субстанции могут быть занесены в запоминающее устройство C-1204 блока C-1200 электрического управления и/или вспомогательного блока D-2000 электрического управления.
[00132] На этапе S200 выполняют определение объекта 20, и идентификационные данные объекта извлекают с помощью идентификатора D-1100 объекта в результате выполнения программных команд в блоке C-1200 электрического управления и/или вспомогательном блоке D-2000 электрического управления.
[00133] Например, идентификатор D-1100 объекта может определять и считывать маркер D-1210 субстанции и в соответствии с идентификационными данными объекта передавать сигналы считывания объекта в блок C-1200 электрического управления и/или вспомогательный блок D-2000 электрического управления.
[00134] Кроме того, идентификационные данные объекта могут быть занесены в запоминающее устройство C-1204 блока C-1200 электрического управления и/или вспомогательного блока D-2000 электрического управления.
[00135] Непосредственно после завершения этапа S200 может выполняться оценка извлеченных данных субстанции и извлеченных данных объекта в блоке C-1200 электрического управления и/или вспомогательном блоке D-2000 электрического управления для проверки надлежащего дозирования субстанции и, в случае необходимости, прерывание процесса посредством создания сообщения и отключения электрического исполнительного механизма дозирующего устройства B-1000, как было показано выше по отношению к фиг. 5.
[00136] На этапе S300 количество Qs субстанции определяют с помощью измерительной системы C-1000 и с помощью программных команд, выполняемых в блоке C-1200 электрического управления.
[00137] Например, антенна C-1100 может выдавать выходные токи Os на основании электромагнитных взаимодействий между поршнем B-1200 и антенной C-1100. Электрическая схема C-1400 получения данных может принимать выходные токи Os и на основании выходных токов Os подавать в блок C-1200 электрического управления сигналы считывания частоты в соответствии с резонансной частотой Fr выходных токов Os. Блок C-1200 электрического управления может принимать сигналы считывания частоты и на основании сигналов считывания частоты определять положение X поршня, а следовательно, количества Qs субстанции, доставляемого устройством 1000 доставки лекарственных препаратов.
[00138] На этапе S400 идентификационные данные объекта, идентификационные данные субстанции и данные о количестве Qs субстанции передают на электронное устройство D-1600 и/или на сервер (и базу данных) D-1500 с помощью сетевого контроллера D-1300 и с помощью программных команд, выполняемых в блоке C-1200 электрического управления.
[00139] В альтернативном варианте реализации идентификационные данные объекта, идентификационные данные субстанции и/или данные о количестве Qs субстанции вначале могут быть занесены в запоминающее устройство C-1204 блока C-1200 электрического управления, а затем переданы на электронное устройство D-1600 и/или сервер (и базу данных) D-1500 с помощью сетевого контроллера D-1300 и с помощью программных команд, выполняемых в блоке C-1200 электрического управления.
[00140] Кроме того, в результате практичности исполнения измерительной системы C-1000 и/или системы D-1000 слежения, например, небольшого веса, портативности, отсутствия зависимости от механических систем, низкого энергопотребления и/или отсутствия необходимости подключения к системе электроснабжения высокого напряжения, измерительная система C-1000 и/или система D-1000 слежения могут быть позднее установлены на ранее изготовленном устройстве для доставки лекарственных препаратов, например устройстве для доставки лекарственных препаратов, уже находящемся в эксплуатации и/или в процессе производства. Например, измерительная система C-1000 и/или система D-1000 слежения могут быть позднее встроены в изготовленное устройство для доставки лекарственных препаратов посредством закрепления на дозирующем устройстве B-1000 и/или держателе A-1000 с использованием крепежных устройств, в том числе болтов, заклепок, адгезивных средств, клеящих веществ или их сочетания.
[00141] Фиг. 7 представляет собой схематическое изображение аппаратной схемы блока C-1200 электрического управления устройства 1000 для доставки лекарственных препаратов. Следует отметить, что в одном варианте реализации изобретения на фиг. 7 также изображена аппаратная схема вспомогательного блока D-2000 электрического управления. Следует отметить, что в одном варианте реализации изобретения на фиг. 7 также изображена аппаратная схема сервера (и базы данных) D-1500 (и, в частности, по меньшей мере монитор C-1214, контроллер C-1212 дисплея, дисковый накопитель C-1208, ПЗУ C-1210 на компакт-диске, контроллер C-1206 дискового накопителя, запоминающее устройство C-1204, шина C-1228, процессор C-1202, сетевой интерфейс C-1226, сеть C-1224, интерфейс C-1216 ввода/вывода и клавиатура/мышь С-1220).
[00142] Как показано на фиг. 7, системы, операции и процессы в соответствии с данным изобретением могут быть реализованы с применением электрической схемы обработки данных, например процессора C-1202, или по меньшей мере одного процессора специализированного применения (ASP, application specific processor). Процессор C-1202 может использовать машиночитаемый носитель данных, в том числе запоминающее устройство C-1204 (например, ROM, EPROM, EEPROM, флэш-память, статическая память, DRAM, SDRAM и их аналоги), способное управлять процессором C -1202 для выполнения и/или управления системами, операциями и процессами по данному изобретению. Другие носители данных могут управляться с помощью контроллера C-1206 дискового накопителя, который может управлять накопителем C-1208 на жестком диске или накопителем C-1210 на оптическом диске.
[00143] В альтернативном варианте реализации изобретения процессор C-1202 или его разновидности могут содержать или монопольно содержать логическое устройство для дополнения или для реализации данного изобретения в полном объеме. Такое логическое устройство содержит, среди прочего, специализированную интегральную схему (ASIC, application-specific integrated circuit), программируемую логическую интегральную схему (FPGA, field programmable gate array), типовую матричную логическую схему (GAL, generic-array of logic) и их аналоги. Процессор C-1202 может представлять собой отдельное устройство или единое устройство обработки данных. Кроме того, данное изобретение может использовать преимущество, полученное в результате возможностей многоядерного процессора по параллельной обработке данных.
[00144] В другом аспекте результаты обработки данных в соответствии с данным изобретением могут отображаться с помощью контроллера C-1212 дисплея на мониторе C-1214, который может быть внешним по отношению к блоку C-1200 электрического управления или составлять его часть. Кроме того, монитор C-1214 может быть оборудован сенсорным интерфейсом для введения команд/инструкций. Контроллер C-1212 дисплея также может содержать по меньшей мере один блок обработки графической информации для повышения вычислительной эффективности. В дополнительном варианте реализации блок C-1200 электрического управления может содержать интерфейс C-1216 ввода/вывода, предназначенный для ввода данных датчиков от датчиков C-1218 и для вывода распоряжений на исполнительные механизмы C-1222. Датчики C-1218 и исполнительные механизмы C-1222 представляют собой иллюстративные примеры любых датчиков и исполнительных механизмов по данному изобретению. Например, датчики могут представлять собой схему C-1400 получения данных для блока C-1200 электрического управления и вспомогательного блока D-2000 электрического управления, а также идентификатор D-1100 объекта и идентификатор D-1200 субстанции для вспомогательного блока D-2000 электрического управления
[00145] Кроме того, к интерфейсу C-1216 ввода/вывода могут быть подключены другие устройства в качестве периферийных устройств или в качестве части блока C-1200 электрического управления. Например, клавиатура или позиционирующее устройство, в том числе мышь C-1220, могут управлять параметрами различных процессов и алгоритмов по данному изобретению и могут быть подключены к интерфейсу ввода/вывода C-1216 для получения дополнительных функциональных возможностей и вариантов конфигурации, или для управления параметрами дисплея. Исполнительные механизмы C-1222, которые могут быть применены в любом из элементов устройств по данному изобретению, также могут быть подключены к интерфейсу C-1216 ввода/вывода.
[00146] Вышеупомянутые аппаратные компоненты могут быть сопряжены с сетью C-1224, в том числе с сетью Интернет или локальной внутренней сетью, через сетевой интерфейс C-1226 для передачи или приема данных, содержащих регулируемые параметры, на мобильное устройство. Центральная шина C-1228 может быть предусмотрена для взаимного соединения вышеупомянутых аппаратных компонентов и для предоставления по меньшей мере одного пути для обмена численными данными между ними.
[00147] Варианты реализации по данному изобретению также могут представлять собой варианты, обозначенные ниже в круглых скобках.
[00148] (1) Устройство для доставки лекарственных препаратов, содержащее цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня, цепь электропитания для выдачи входных токов, антенну, закрепленную вдоль цилиндра, содержащую схемную плату с совокупностью слоев, последовательно установленных друг на друга и соединенных с цепью электропитания, и совокупность катушек индуктивности на совокупности слоев для приема входных токов, создания индуктивного сопротивления совместно с поршнем и выдачи выходных токов в соответствии с величиной индуктивного сопротивления, идентификатор объекта для определения маркера объекта и выдачи сигналов считывания объекта в соответствии с данными об объекте, идентификатор субстанции для считывания маркера субстанции и выдачи сигналов считывания субстанции в соответствии с данными о субстанции, и электрическую схему для обработки данных, выполненную с возможностью приема выходных токов, сигналов считывания объекта и сигналов считывания субстанции, определения количества субстанции внутри цилиндра на основании выходных токов, извлечения данных об объекте на основании сигналов считывания объекта и извлечения данных о субстанции на основании сигналов считывания субстанции.
[00149] (2) Устройство для доставки лекарственных препаратов по п. (1), в котором совокупность катушек индуктивности расположена вдоль хода поршня.
[00150] (3) Устройство для доставки лекарственных препаратов по п. (1) или (2), в котором по меньшей мере две катушки индуктивности из совокупности катушек индуктивности смещены относительно друг друга на заданное расстояние смещения для выдачи первого выходного тока, соответствующего положению поршня в первой части хода поршня, и второго выходного тока, соответствующего положению поршня во второй части хода поршня.
[00151] (4) Устройство для доставки лекарственных препаратов по любому из пп. (1)-(3), в котором расстояние смещения по сути равно половине ширины по меньшей мере двух катушек индуктивности.
[00152] (5) Устройство для доставки лекарственных препаратов по любому из пп. (1)-(4), в котором схемная плата дополнительно содержит первый слой с первой одинарной прямоугольной катушкой индуктивности, второй слой со второй одинарной прямоугольной катушкой индуктивности, третий слой с первой парой прямоугольных катушек индуктивности, имеющих электрическое соединение с первой прямоугольной катушкой индуктивности и смещенных на заданное расстояние смещения, для выдачи первого выходного тока, и четвертый слой со второй парой прямоугольных катушек индуктивности, имеющих электрическое соединение с второй прямоугольной катушкой индуктивности и смещенных на заданное расстояние смещения, для выдачи второго выходного тока,
[00153] (6) Устройство для доставки лекарственных препаратов по любому из пп. (1)-(5), в котором маркер объекта представляет собой чип радиочастотной идентификации, а идентификатор объекта выполнен с возможностью считывания чипа радиочастотной идентификации.
[00154] (7) Устройство для доставки лекарственных препаратов по любому из пп. (1)-(6), в котором маркер субстанции представляет собой чип радиочастотной идентификации, размещенный на контейнере, содержащем субстанцию, а идентификатор субстанции выполнен с возможностью считывания чипа радиочастотной идентификации.
[00155] (8) Устройство для доставки лекарственных препаратов по любому из пп. (1)-(7), дополнительно содержащее сетевой контроллер, выполненный с возможностью отправки количества вещества, данных об объекте и данных о субстанции в по меньшей мере одно из базы данных и электронного устройства.
[00156] (9) Устройство для доставки лекарственных препаратов, содержащее цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня, цепь электропитания для выдачи входных токов, антенну, закрепленную вдоль цилиндра, содержащую схемную плату с совокупностью слоев, последовательно установленных друг на друга и соединенных с цепью электропитания, и совокупность катушек индуктивности на совокупности слоев для приема входных токов, создания индуктивного сопротивления совместно с поршнем и выдачи выходных токов в соответствии с величиной индуктивного сопротивления, и электрическую схему для обработки данных, соединенную с совокупностью катушек индуктивности и выполненную с возможностью приема выходных токов и определения количества субстанции внутри цилиндра на основании выходных токов.
[00157] (10) Устройство для доставки лекарственных препаратов по п. (9), в котором совокупность катушек индуктивности расположена вдоль хода поршня.
[00158] (11) Устройство для доставки лекарственных препаратов по пп. (9) или (10), в котором по меньшей мере две катушки индуктивности из совокупности катушек индуктивности смещены относительно друг друга на заданное расстояние смещения для выдачи первого выходного тока, соответствующего положению поршня в первой части хода поршня, и второго выходного тока, соответствующего положению поршня во второй части хода поршня.
[00159] (12) Устройство для доставки лекарственных препаратов по любому из пп. (9)-(11), в котором расстояние смещения по сути равно половине ширины по меньшей мере двух катушек индуктивности.
[00160] (13) Устройство для доставки лекарственных препаратов по любому из пп. (9)-(12), в котором схемная плата дополнительно содержит первый слой с первой одинарной прямоугольной катушкой индуктивности, второй слой со второй одинарной прямоугольной катушкой индуктивности, третий слой с первой парой прямоугольных катушек индуктивности, имеющих электрическое соединение с первой прямоугольной катушкой индуктивности и смещенных на заданное расстояние смещения, для выдачи первого выходного тока, и четвертый слой со второй парой прямоугольных катушек индуктивности, имеющих электрическое соединение с второй прямоугольной катушкой индуктивности и смещенных на заданное расстояние смещения, для выдачи второго выходного тока,
[00161] (14) Устройство для доставки лекарственных препаратов, содержащее цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня, измерительную систему, закрепленную вдоль цилиндра, для создания бесконтактного взаимодействия с поршнем и выдачи выходных токов в соответствии с результатами численного определения бесконтактного взаимодействия, и электрическую схему для обработки данных, выполненную с возможностью приема выходных токов и определения значений переменной, зависящей от положения поршня внутри цилиндра, на основании выходных токов.
[00162] (15) Устройство для доставки лекарственных препаратов по п. (14), в котором бесконтактное взаимодействие представляет собой индуктивное взаимодействие, а измерительная система содержит совокупность катушек для создания индуктивного взаимодействия.
[00163] (16) Устройство для доставки лекарственных препаратов по пп. (14) или (15), в котором поршень содержит маркер индуктивности.
[00164] (17) Устройство для доставки лекарственных препаратов по любому из пп. (14)-(16), в котором бесконтактное взаимодействие представляет собой магнитное поле, а измерительная система содержит датчики магнитного поля для восприятия магнитного поля.
[00165] (18) Устройство для доставки лекарственных препаратов по любому из пп. (14)-(17), в котором поршень содержит магнитный маркер для создания магнитного поля.
[00166] (19) Устройство для доставки лекарственных препаратов по любому из пп. (14)-(18), в котором бесконтактное взаимодействие представляет собой магнитоиндукционное взаимодействие, а измерительная система содержит магнитоиндукционные датчики, например, датчики перемещения.
[00167] (20) Устройство для доставки лекарственных препаратов по любому из пп. (14)-(19), в котором бесконтактное взаимодействие представляет собой звуковое взаимодействие, а измерительная система содержит микроволновой генератор.
[00168] (21) Устройство для доставки лекарственных препаратов по любому из пп. (14)-(20), в котором бесконтактное взаимодействие представляет собой оптическое взаимодействие, а измерительная система содержит оптический датчик.
[00169] (22) Способ управления работой устройства для доставки лекарственных препаратов, которое выполняет доставку субстанции к объекту, включающий следующие этапы: извлечение идентификационных данных субстанции с помощью идентификатора субстанции в устройстве для доставки лекарственных препаратов и маркера субстанции для субстанции, извлечение идентификационных данных объекта с помощью идентификатора объекта в устройстве для доставки лекарственных препаратов и маркера объекта для объекта, доставки субстанции с помощью дозирующего устройства в устройстве для доставки лекарственных препаратов, определения количества субстанции, доставленного с помощью измерительной системы устройства для доставки лекарственных препаратов, и документирования идентификационных данных субстанции, идентификационных данных объекта и данных о доставляемом количестве субстанции с помощью электрической схемы устройства для доставки лекарственных препаратов.
[00170] (23) Способ по п. (22), дополнительно содержащий выдачу входных токов через цепь электропитания измерительной системы, приема входных токов в совокупности катушек индуктивности измерительной системы, создание индуктивных взаимодействий между совокупностью катушек индуктивности и поршнем системы дозирования и выдача выходных токов в соответствии с величиной индуктивных взаимодействий.
[00171] (24) Способ по пп. (22) или (23), в котором устройство для доставки лекарственных препаратов содержит цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре по ходу поршня и измерительную систему, закрепленную вдоль цилиндра.
[00172] (25) Способ по любому из пп. (22)-(24), дополнительно включающий создание с помощью измерительной системы бесконтактного взаимодействия с поршнем.
[00173] (26) Способ по любому из пп. (22)-(25), дополнительно включающий создание с помощью измерительной системы выходных токов в соответствии с результатами численного определения бесконтактного взаимодействия.
[00174] (27) Способ по любому из пп. (22)-(26), в котором бесконтактное взаимодействие представляет собой индуктивное взаимодействие, а измерительная система содержит совокупность катушек для создания индуктивного взаимодействия.
[00175] (28) Способ по любому из пп. (22)-(27), в котором поршень содержит маркер индуктивности.
[00176] (29) Способ по любому из пп. (22)-(28), в котором бесконтактное взаимодействие представляет собой магнитное поле, а измерительная система содержит датчики магнитного поля для восприятия магнитного поля.
[00177] (30) Способ по любому из пп. (22 -(29), в котором поршень содержит магнитный маркер для создания магнитного поля.
[00178] (31) Способ по любому из пп. (22)-(29), в котором бесконтактное взаимодействие представляет собой магнитоиндукционное взаимодействие, а измерительная система содержит магнитоиндукционные датчики, например, датчики перемещения.
[00179] (32) Способ по любому из пп. (22)-(31), в котором бесконтактное взаимодействие представляет собой звуковое взаимодействие, а измерительная система содержит микроволновой генератор.
[00180] (33) Способ по любому из пп. (22)-(32), в котором бесконтактное взаимодействие представляет собой оптическое взаимодействие, а измерительная система содержит оптический датчик.
[00181] В предшествующем рассмотрении раскрыты и описаны исключительно типовые варианты реализации предмета изобретения по данному описанию. Как понятно специалистам в данной области техники, задачи изобретения по данному описанию могут быть реализованы в других конкретных формах без отклонения от сущности изобретения или его существенных характеристик. Вследствие этого данное описание предназначено исключительно для иллюстрации, а не для ограничения объема задач данного изобретения, а также объема формулы данного изобретения.
[00182] В соответствии с вышеизложенными принципами изобретения возможны многочисленные модификации и варианты реализации изобретения по данному описанию. В результате этого следует понимать, что в рамках объема прилагаемых пунктов формулы изобретения, изобретение может быть реализовано в других вариантах, отличные от конкретно описанных в данном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДОСТАВКИ ПО МЕНЬШЕЙ МЕРЕ ДВУХ ЛЕКАРСТВЕННЫХ ВЕЩЕСТВ | 2010 |
|
RU2567269C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ИСПОЛЬЗУЕМЫЙ В НЕМ СЕНСОРНЫЙ БЛОК | 1995 |
|
RU2130618C1 |
| РАССЕИВАТЕЛЬ С МАГНИТНЫМ ПРИВОДОМ | 2020 |
|
RU2820035C1 |
| ИНФУЗИОННЫЙ НАСОСНЫЙ УЗЕЛ | 2008 |
|
RU2510758C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ | 2005 |
|
RU2397508C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПРОХОЖДЕНИЯ КОММУНИКАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2735787C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЭЛЕКТРОННОЙ МОДЕЛИ MDI (ДОЗИРУЮЩЕГО ИНГАЛЯТОРА) | 2012 |
|
RU2633269C2 |
| ЭЛЕКТРОМАГНИТНОЕ ЗОНДИРОВАНИЕ И ОБНАРУЖЕНИЕ ПРОГЛАТЫВАЕМЫХ МАРКЕРОВ СОБЫТИЙ | 2017 |
|
RU2711058C1 |
| ОГРАНИЧИТЕЛЬ ЦИКЛА НАГРЕВА ЛЕКАРСТВЕННОГО ПРЕПАРАТА ДЛЯ ИНЪЕКЦИОННОГО УСТРОЙСТВА | 2007 |
|
RU2443402C2 |
| Противокоронавирусное средство для комбинированной терапии COVID-19 (SARS-CoV-2) и способ лечения | 2020 |
|
RU2745986C1 |
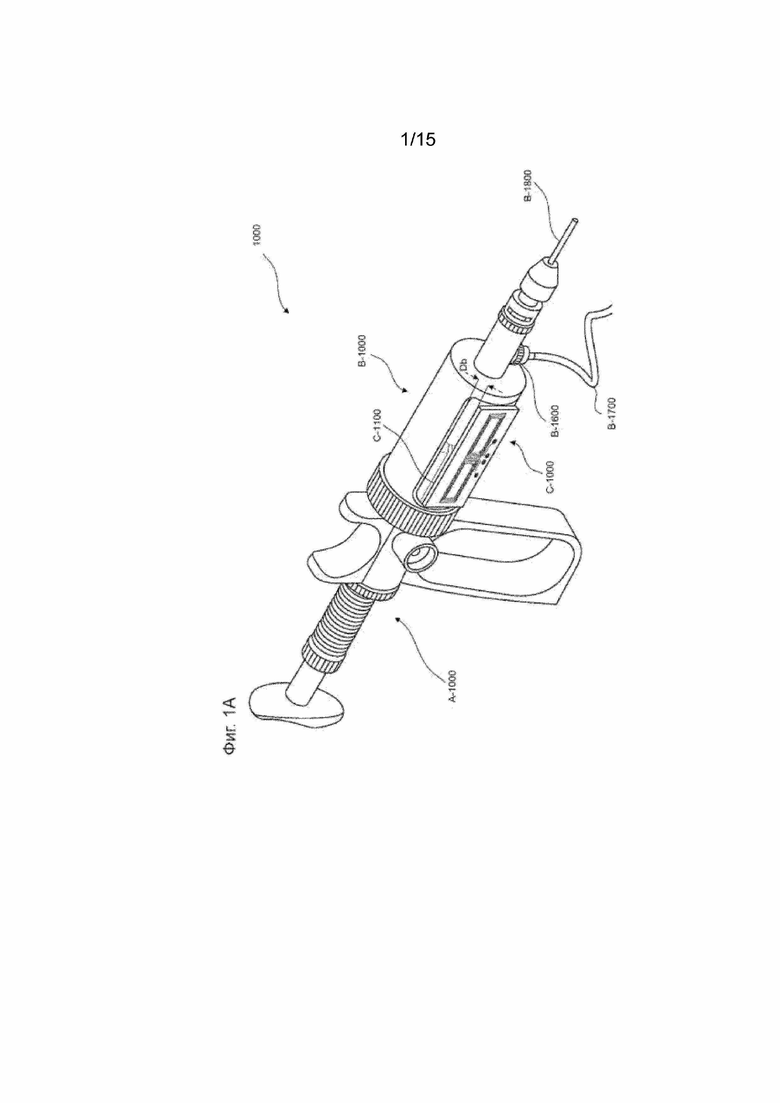
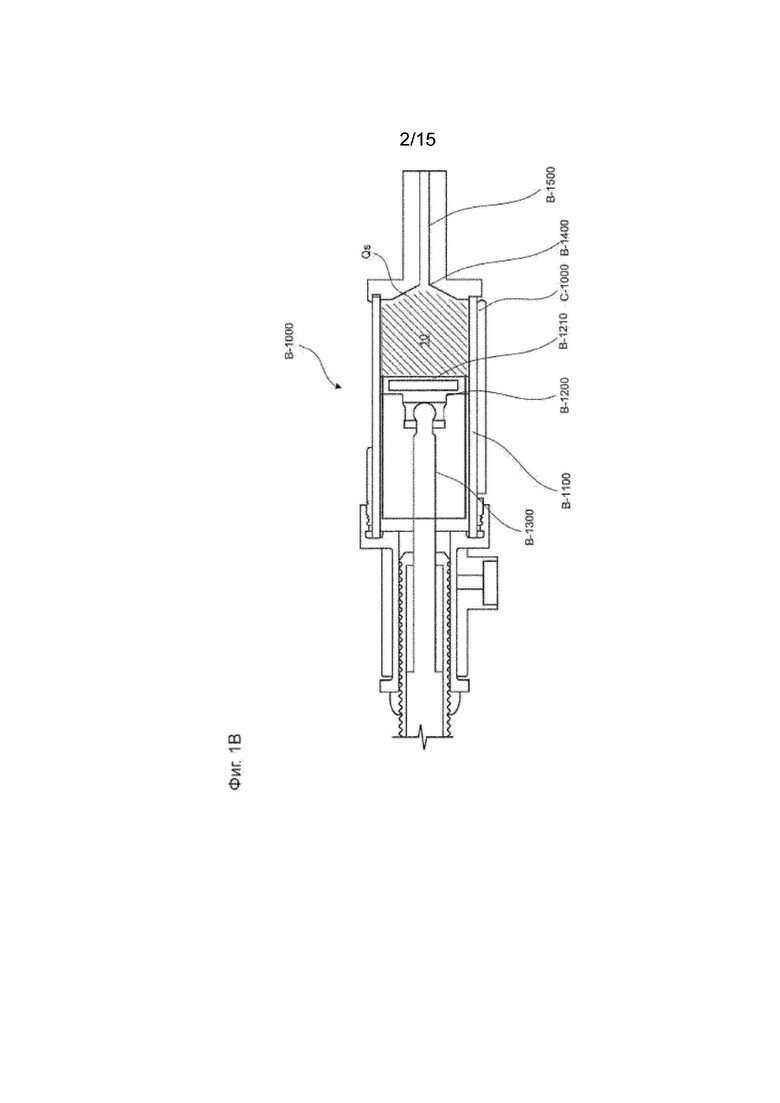
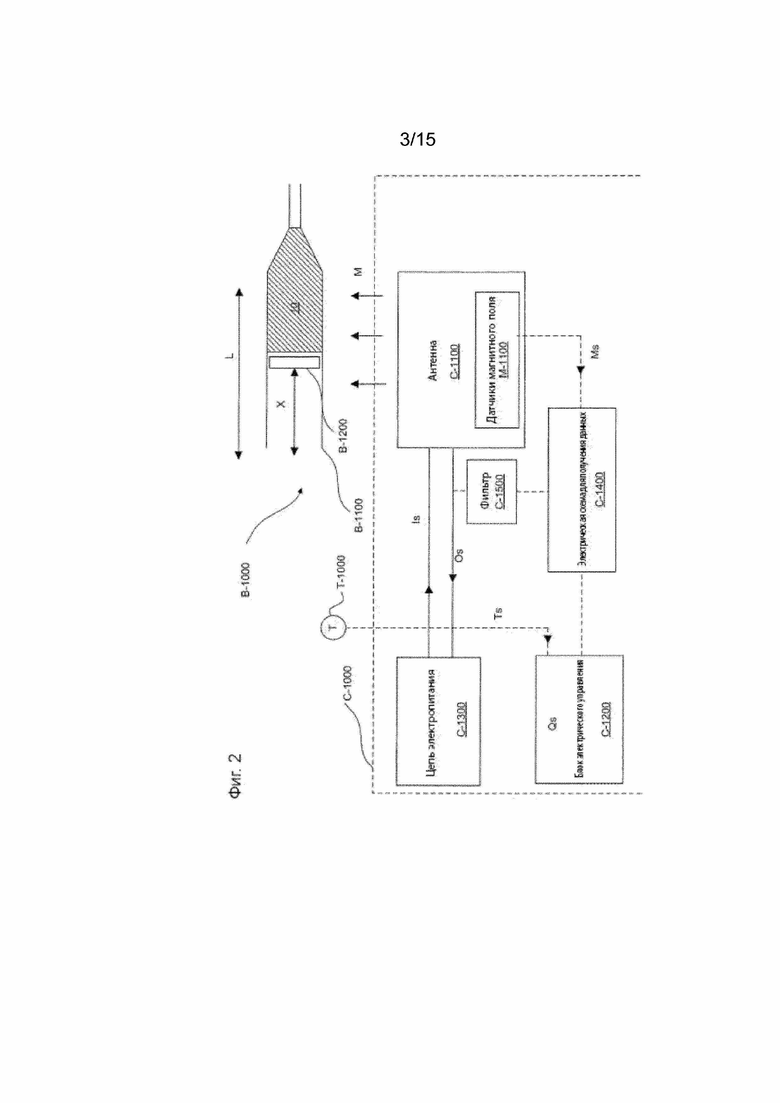
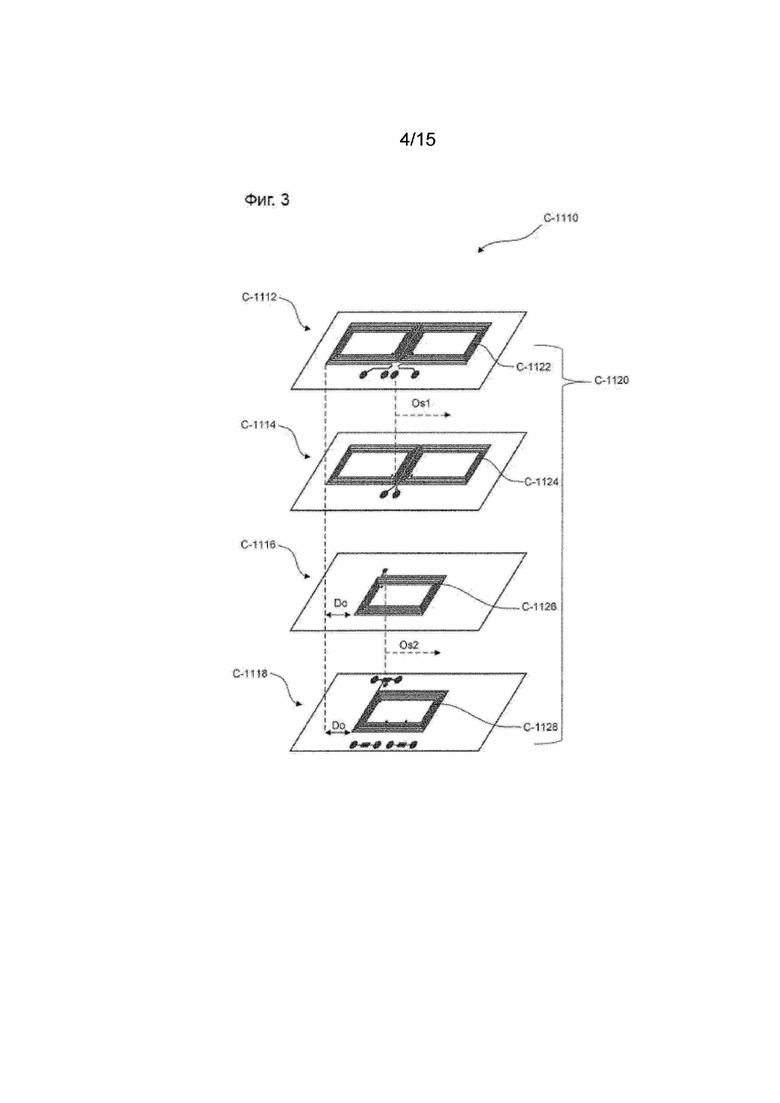
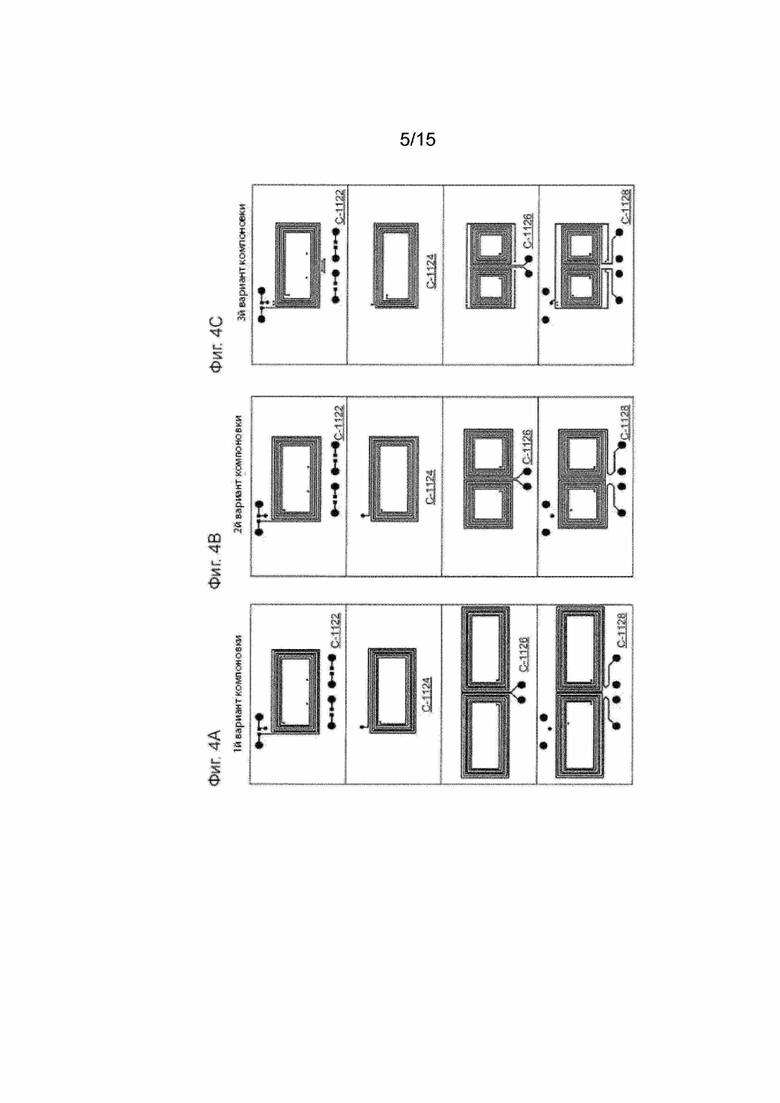
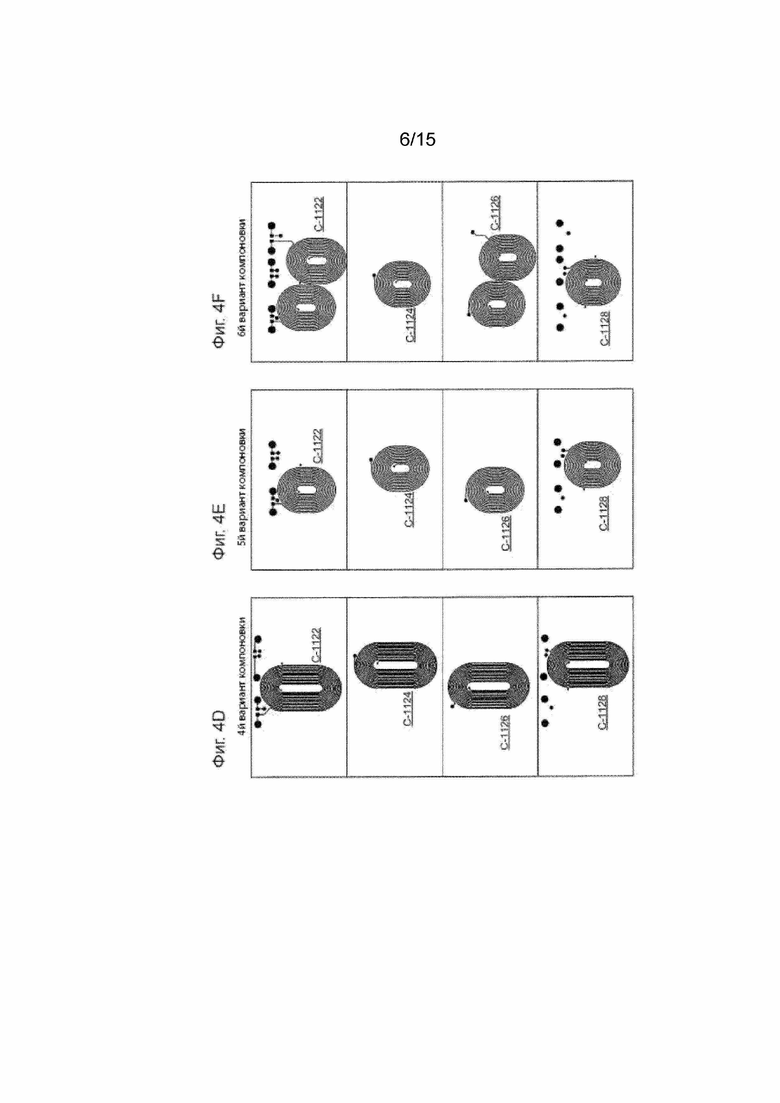
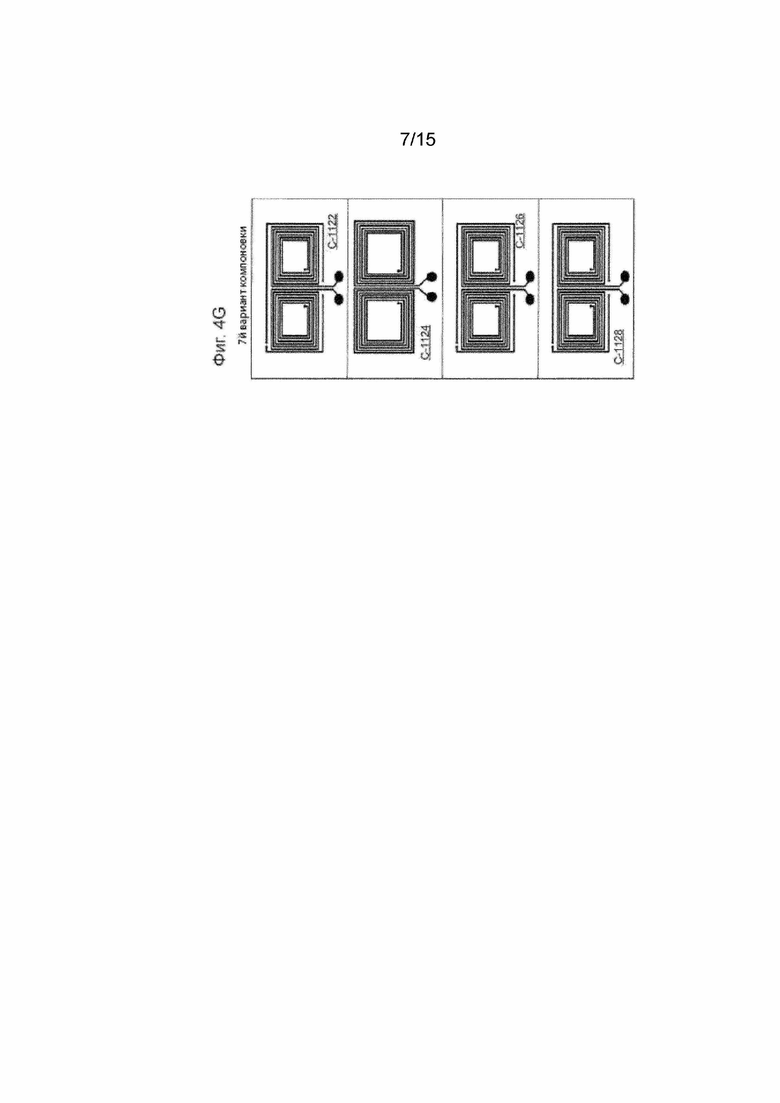
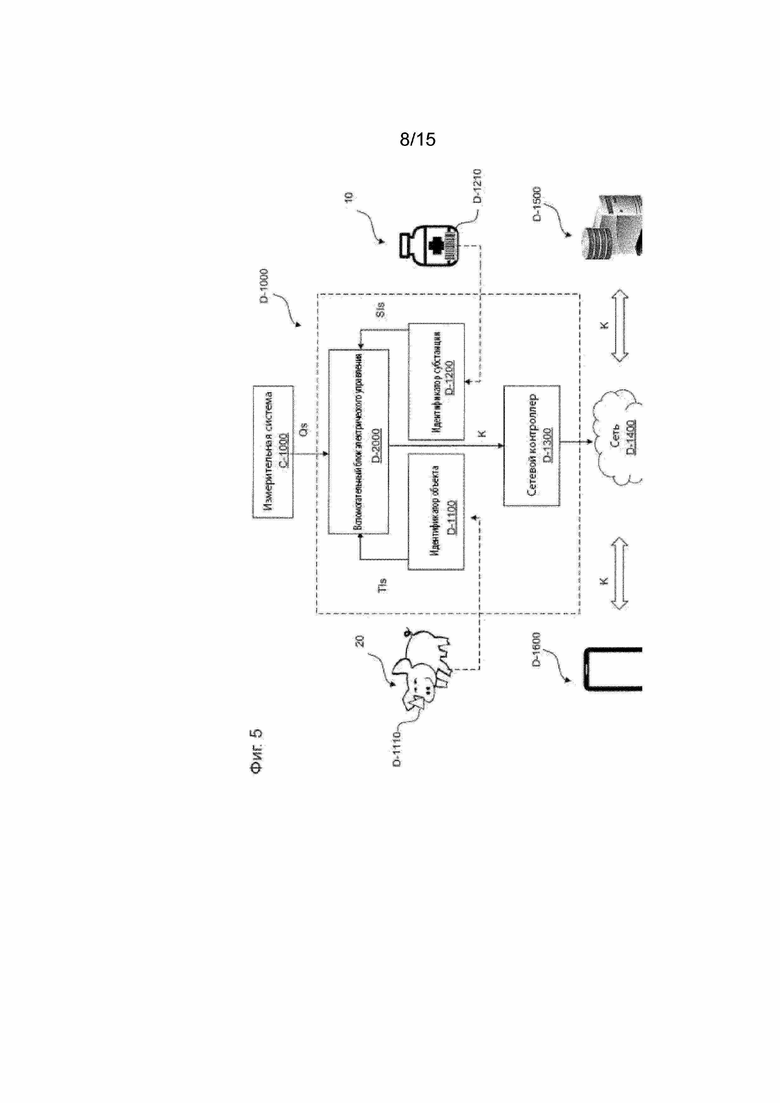
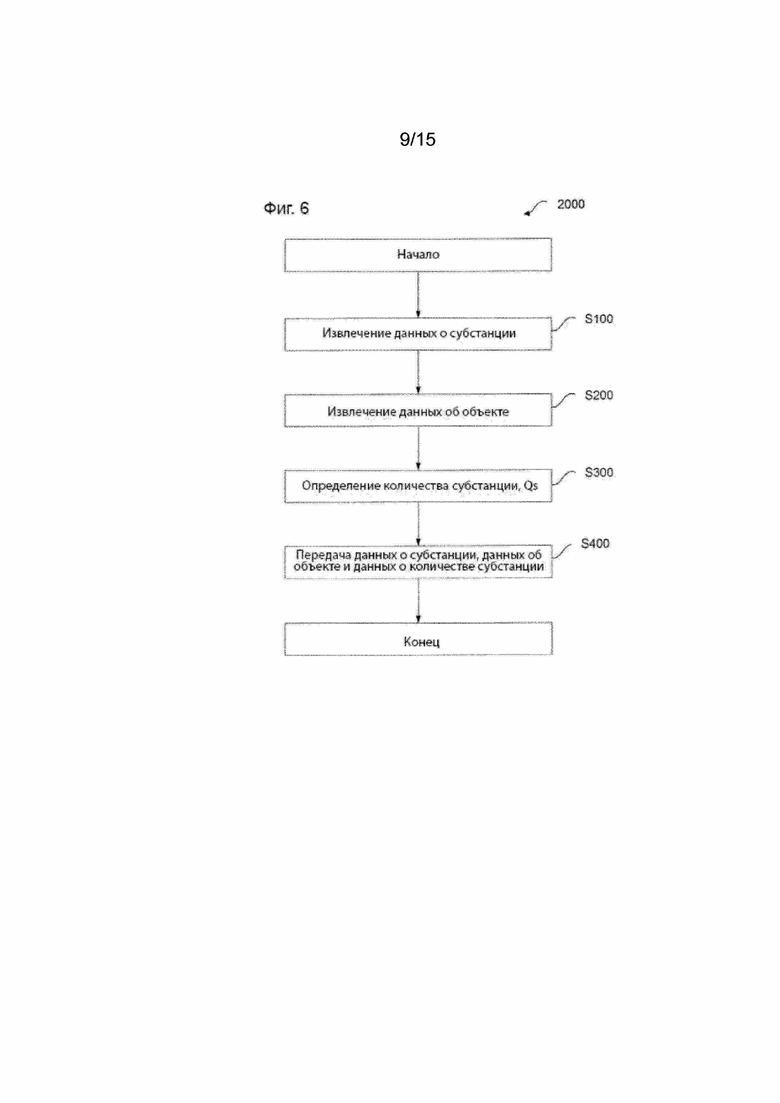
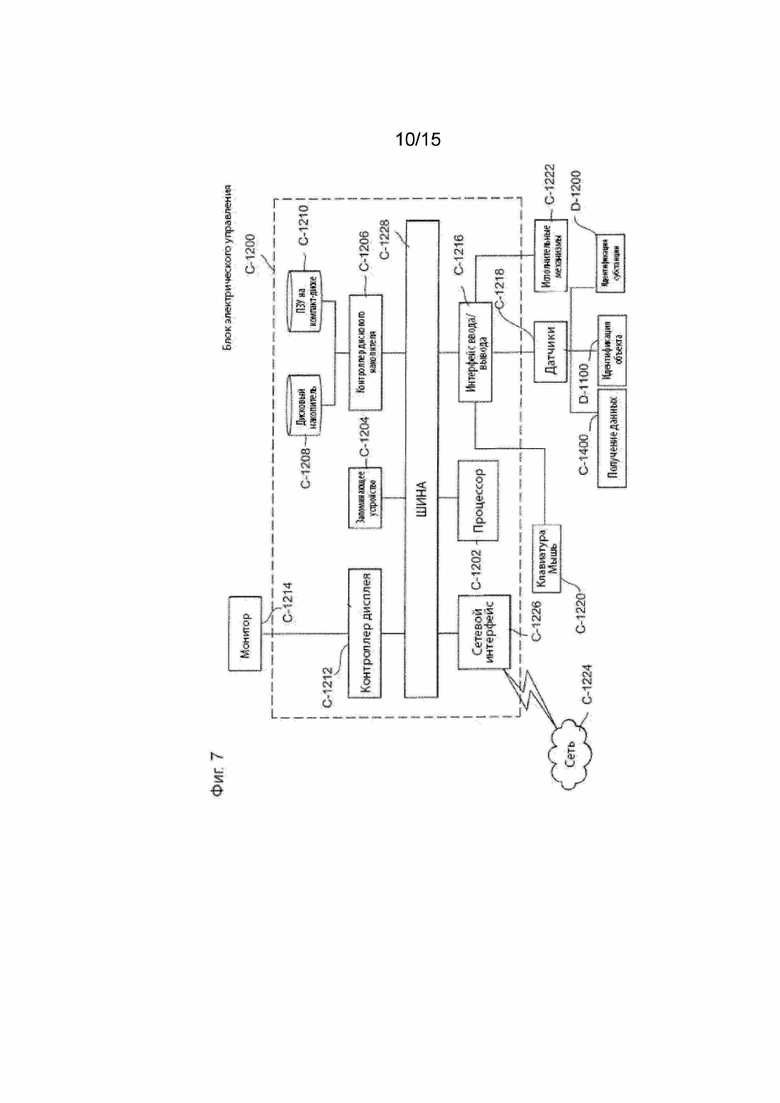
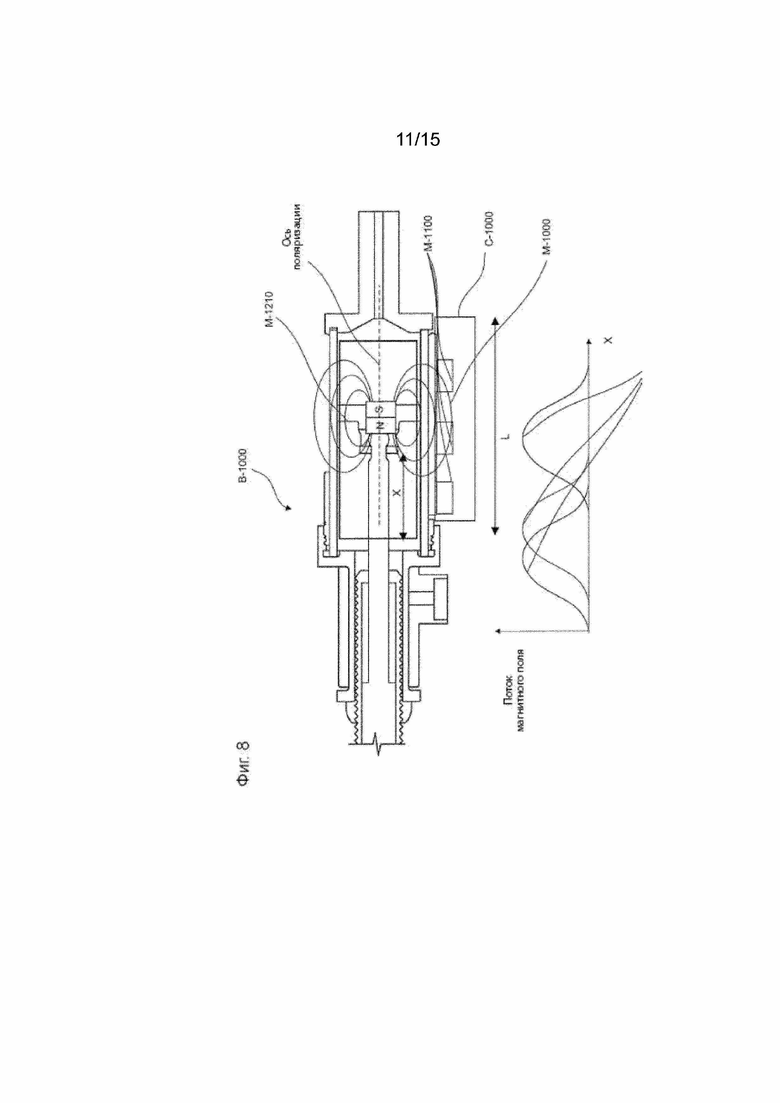
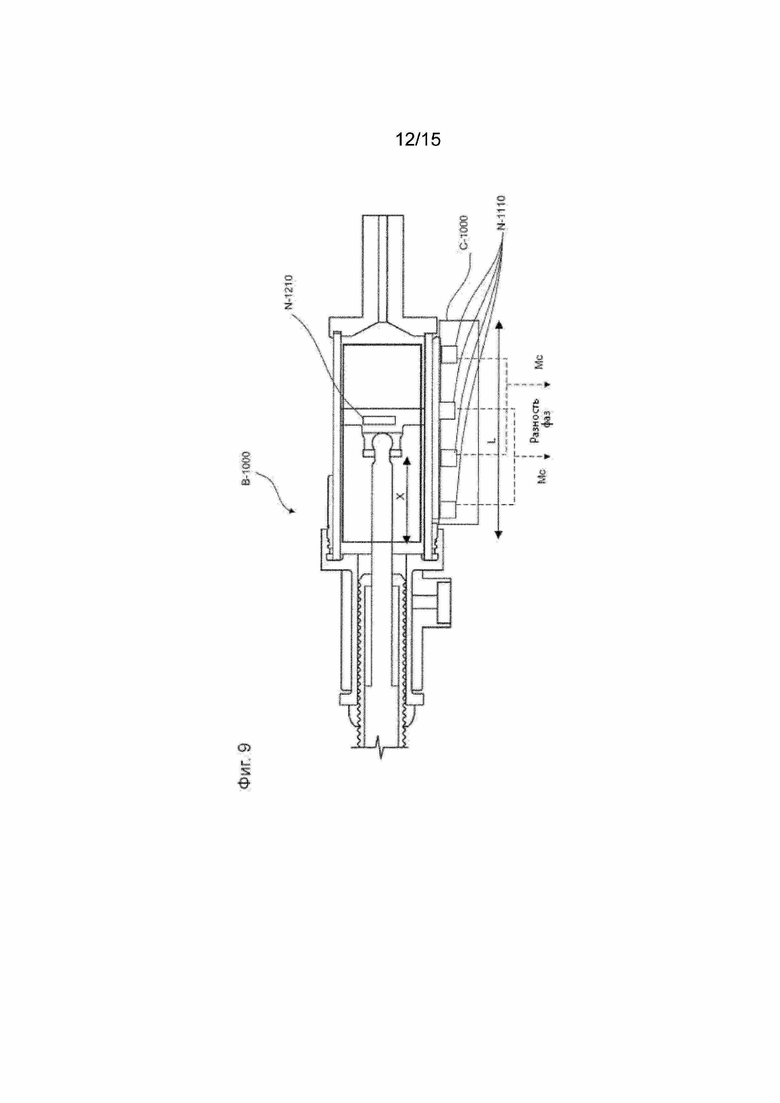
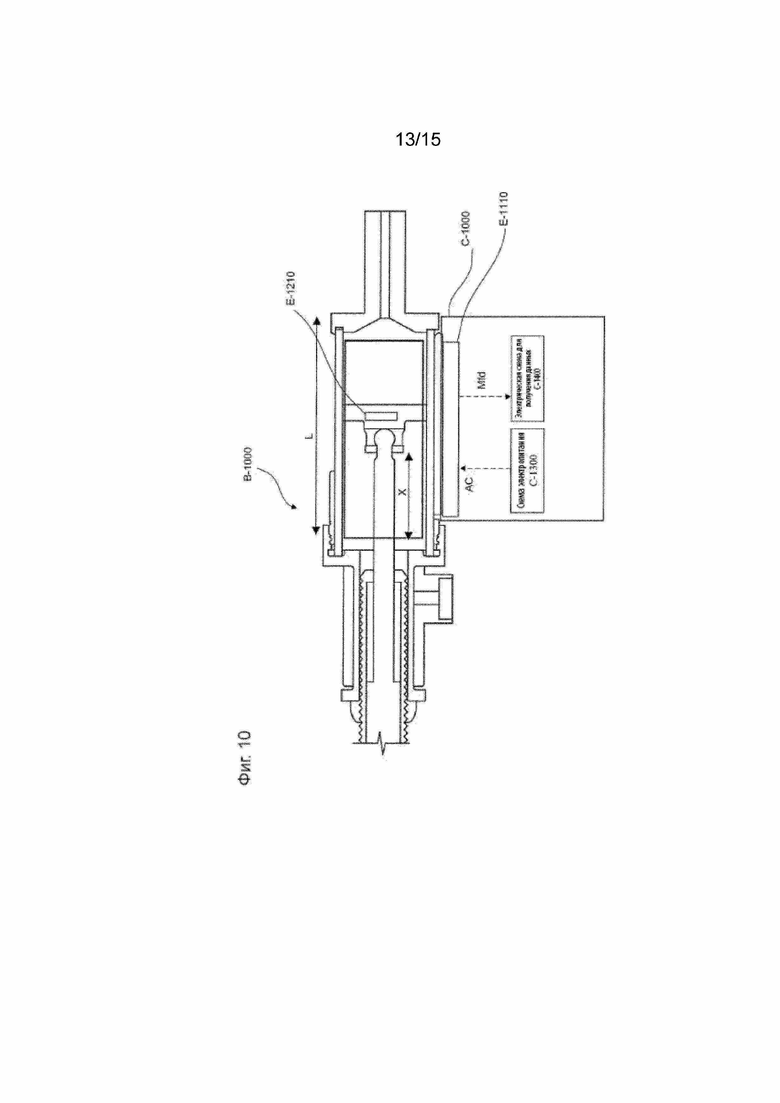
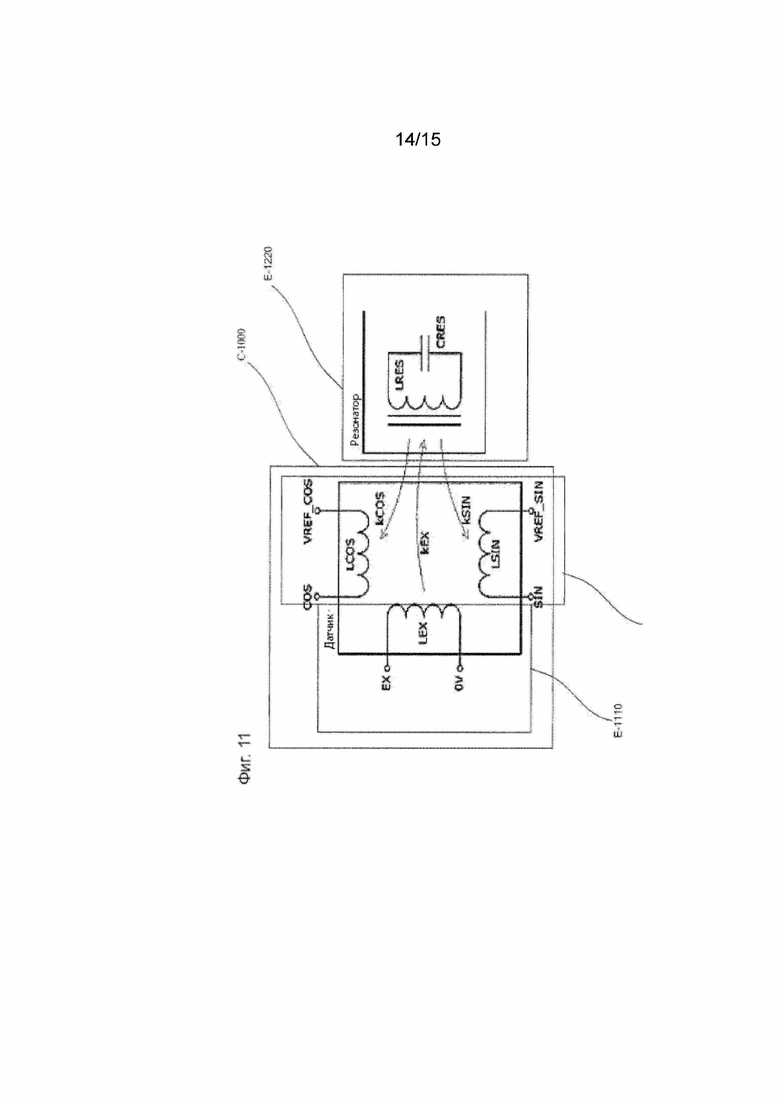
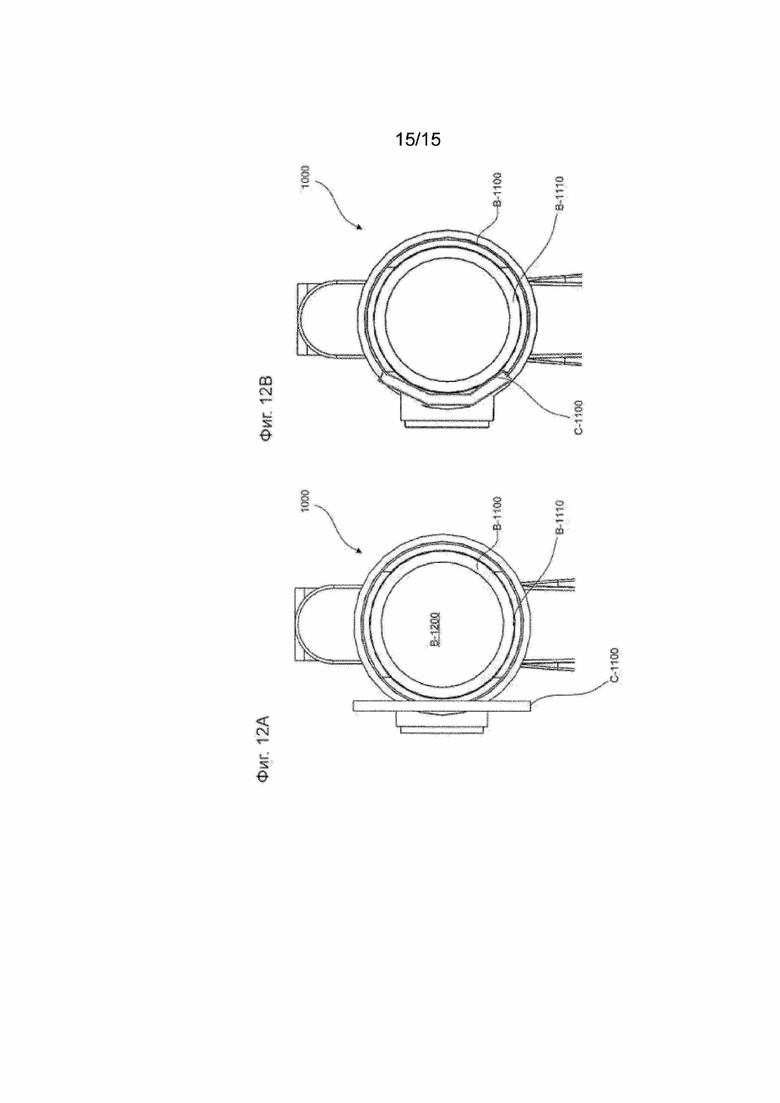
Изобретение относится к медицинской технике, а именно к устройствам для доставки лекарственных препаратов. Устройство содержит цилиндр для размещения субстанции, поршень с возможностью скользящего перемещения в цилиндре, цепь электропитания для выдачи входных токов, антенну, закрепленную вдоль цилиндра, для приема входного тока, создания индуктивного сопротивления совместно с поршнем и выдачи выходных токов в соответствии с положением поршня по ходу поршня, и электрическую схему для обработки данных, выполненную с возможностью приема выходных токов и определения количества субстанции внутри цилиндра на основании выходных токов. 13 з.п. ф-лы, 12 ил.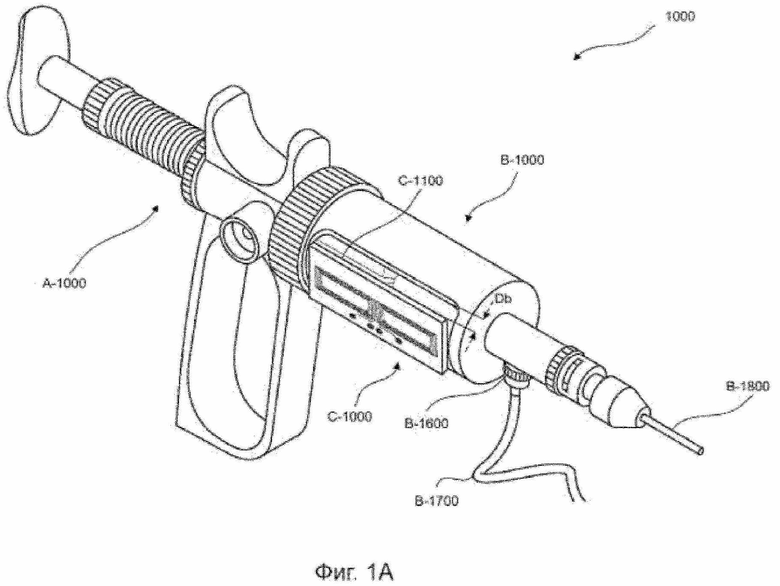
1. Устройство для доставки лекарственных препаратов, содержащее:
цилиндр (В-1100) для содержания субстанции;
поршень (В-1200), выполненный с возможностью скользящего перемещения в цилиндре по ходу (L) поршня;
цепь электропитания (С-1300) для обеспечения входных токов;
антенну (С-1100), закрепленную вдоль цилиндра (В-1100), отличающееся тем, что антенна содержит:
схемную плату со слоями (С-1110), последовательно установленными друг на друга и соединенными с цепью электропитания (С-1300), и
наборы катушек (С-1120) индуктивности на слоях (С-1110) упомянутых слоев, проходящие по ходу (L) поршня для:
- приема входных токов,
- создания индуктивного сопротивления совместно с поршнем и
- выдачи выходных токов в соответствии с величиной индуктивного сопротивления; и
электрическую схему обработки данных, соединенную с катушками индуктивности и выполненную с возможностью:
- приема выходных токов и
- определения количества субстанции внутри цилиндра (В-1100) на основе выходных токов.
2. Устройство по п. 1, отличающееся тем, что наборы катушек имеют различные конфигурации катушек, причем указанные конфигурации катушек включают форму катушки, продольное расположение катушки, поперечное расположение катушки и/или направление намотки.
3. Устройство по п. 2, отличающееся тем, что по меньшей мере два набора катушек из наборов катушек смещены на заданное расстояние смещения (D0) друг от друга, чтобы обеспечить первый выходной ток, в соответствии с положением поршня в пределах первой части хода (L) поршня, и второй выходной ток, в соответствии с положением поршня во второй части хода (L) поршня.
4. Устройство по п. 3, отличающееся тем, что расстояние смещения по существу равно половине ширины катушек в по меньшей мере двух наборах катушек индуктивности.
5. Устройство по п. 3, отличающееся тем, что расстояние смещения по существу равно половине длины катушек в по меньшей мере двух наборах катушек индуктивности.
6. Устройство по п. 4 или 5, отличающееся тем, что схемная плата дополнительно включает в себя:
первый слой с первой одинарной катушкой (С-1122);
второй слой со второй одинарной катушкой (С-1124);
третий слой с первой парой катушек (С-1126), смещенных на заданное расстояние смещения; и
четвертый слой со второй парой катушек (С-1128), смещенных на заданное расстояние смещения.
7. Устройство по любому из пп. 1-6, отличающееся тем, что наборы катушек электрически соединены вместе в группах, каждая из которых обеспечивает соответствующий один из выходных токов.
8. Устройство по любому из пп. 1-7, отличающееся тем, что катушки являются квадратными или прямоугольными.
9. Устройство по любому из пп. 1-7, отличающееся тем, что катушки являются овальными или сферическими.
10. Устройство по любому из пп. 1-9, отличающееся тем, что по меньшей мере один из наборов катушек состоит из двух катушек, расположенных бок о бок на одном из слоев и вращающихся в противоположных направлениях.
11. Устройство по любому из пп. 1-10, отличающееся тем, что оно дополнительно содержит:
идентификатор (D-1100) объекта для определения маркера (D-1110) объекта и выдачи сигналов считывания объекта в соответствии с данными об объекте;
идентификатор (D-1200) субстанции для считывания маркера (D-1210) субстанции и выдачи сигналов считывания субстанции в соответствии с данными о субстанции;
при этом электрическая схема обработки данных выполнена с возможностью:
- приема сигналов считывания объекта и сигналов считывания субстанции,
- извлечения данных об объекте на основе сигналов считывания объекта и
- извлечения данных о субстанции на основании сигналов считывания субстанции.
12. Устройство по п. 11, отличающееся тем, что маркер (D-1110) объекта представляет собой чип радиочастотной идентификации, причем идентификатор (D-1100) объекта выполнен с возможностью считывания чипа радиочастотной идентификации.
13. Устройство по п. 11 или 12, отличающееся тем, что маркер (D-1210) субстанции представляет собой чип радиочастотной идентификации, размещенный на контейнере, содержащем субстанцию, причем идентификатор (D-1200) субстанции выполнен с возможностью считывания чипа радиочастотной идентификации.
14. Устройство по пп. 11, 12 или 13, отличающееся тем, что оно дополнительно содержит сетевой контроллер, выполненный с возможностью отправки данных о количестве субстанции, данных об объекте и данных о субстанции в по меньшей мере одно из базы данных и электронного устройства.
| WO 2016202339 A1, 22.12.2016 | |||
| US 5782814 A, 21.07.1998 | |||
| US 2011270188 A1, 03.11.2011. |

