Изобретение имеет отношение к устройству для определения положения подвижного транспортного средства относительно локационного маркерного устройства с фиксированным местоположением. Локационное маркерное устройство (устройство определения местоположения) включает в себя катушку индуктивности, на которую подано электропитание для излучения магнитного поля, которое детектируется сенсорным блоком, установленным на подвижном транспортном средстве и вырабатывающим информацию о местоположении преимущественно в виде значений координат X и Y, указывающих относительное положение маркерного устройства и сенсорного блока.
Локационное маркерное устройство может представлять собой катушку индуктивности, которая запитывается от источника переменного тока; в альтернативном варианте локационное маркерное устройство может представлять собой ответчик, который является инертным (пассивным) устройством, имеющим катушку, на которую подается питание за счет индуктивного возбуждения переменным магнитным полем обычно от передатчика на подвижном транспортном средстве. Имеются в продаже ответчики, которые в дополнение к излучению магнитного поля создают также сигнал однозначного опознания. Такие ответчики относятся к кодовым ответчикам и могут быть использованы в варианте осуществления изобретения для определения положения подвижного транспортного средства относительно определенного местоположения. Термин "подвижное транспортное средство", использованный в описании настоящего изобретения, означает не только само по себе транспортное средство, такое как робокар (тележку с автоматическим управлением), но также включает в себя подвижные устройства, установленные на таком транспортном средстве, например, такие как вилочные захваты на автопогрузчике с вилочным захватом или подвижная соединительная муфта на буксировочном транспортном средстве.
В настоящем изобретении предлагается устройство для определения положения подвижного транспортного средства относительно локационного маркерного устройства с фиксированным местоположением, в котором локационное маркерное устройство содержит катушку индуктивности, имеющую центральную продольную ось, средства возбуждения для создания возможности излучения катушкой магнитного поля определенной частоты, образованного магнитными силовыми линиями, исходящими радиально и дугообразно из концов продольной оси катушки. Устройство включает в себя сенсорный блок, установленный на подвижном транспортном средстве. Этот сенсорный блок содержит четыре идентичные сенсорные (считывающие) катушки, каждая из которых реагирует на частоту (воспринимает частоту) упомянутого магнитного поля и каждая из которых имеет основную ось. Сенсорный блок содержит средства для установки сенсорных катушек двумя парами с их основными осями, расположенными в параллельных плоскостях на указанном подвижном транспортном средстве таким образом, что они простираются в поперечном направлении относительно продольной оси катушки маркерного устройства, причем основная ось одной из сенсорных катушек каждой пары лежит в одной из двух плоскостей, а основная ось другой сенсорной катушки каждой пары лежит в другой из двух плоскостей. Основные оси сенсорных катушек каждой пары установлены X-образно, при этом основная ось одной катушки каждой пары направлена перпендикулярно основной оси другой сенсорной катушки каждой пары, причем основные оси каждой пары пересекаются в середине их длины и образуют центр каждой пары сенсорных катушек. Эти центры пар сенсорных катушек смещены относительно друг друга на фиксированное опорное расстояние по базовой линии, которая пересекается основными осями каждой сенсорной катушки каждой пары под углом 45o. При помощи схемных (электронных) средств получают сигнал положения от каждой из сенсорных катушек в ответ на прохождение ею через магнитное поле маркерного локационного устройства, а при помощи вычислительных средств вычисляют из этих сигналов положения и из углового соотношения между указанными сенсорными катушками значения координат Y и X, дающих положение сенсорного блока относительно указанного локационного маркерного устройства.
Преимущественно пары сенсорных катушек установлены на панели, имеющей противоположно направленные главным образом параллельные поверхности, причем одна сенсорная катушка каждой из упомянутых двух пар установлена на одной из упомянутых параллельных поверхностей, а другая сенсорная катушка каждой из указанных двух пар установлена на другой из указанных параллельных поверхностей. Эта панель может представлять собой монтажную плату, на которой установлена (смонтирована) по крайней мере часть схемных средств для получения сигналов положения от каждой из указанных сенсорных катушек.
В случае, когда локационное маркерное устройство содержит ответчик, средства возбуждения последнего установлены на подвижном транспортном средстве и включают в себя антенну, предназначенную для передачи частотного сигнала, подходящего для индуктивного возбуждения обмотки указанного ответчика. Эта антенна преимущественно установлена на монтажной плате и содержит замкнутую петлю, охватывающую пары сенсорных катушек.
В том случае, когда соответствующее изобретению устройство использовано для детектирования положения самого подвижного транспортного средства, параллельные плоскости, в которых лежат основные оси сенсорных катушек, преимущественно расположены перпендикулярно продольной оси локационного маркерного устройства.
Изложенные и другие характеристики изобретения станут более понятными из последующего описания предпочтительного варианта осуществления изобретения, данного со ссылками на сопроводительные чертежи.
На фиг.1 показан вид сверху катушки локационного маркерного устройства, схематически иллюстрирующий диаграмму распределения излучаемого ею магнитного поля.
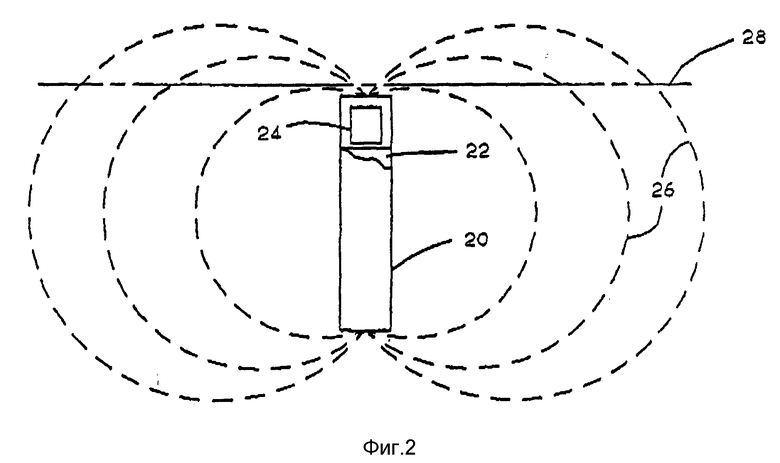
На фиг. 2 показан вид сбоку локационного маркерного устройства в форме ответчика, схематически иллюстрирующий диаграмму распределения магнитного поля, излучаемого катушкой этого ответчика.
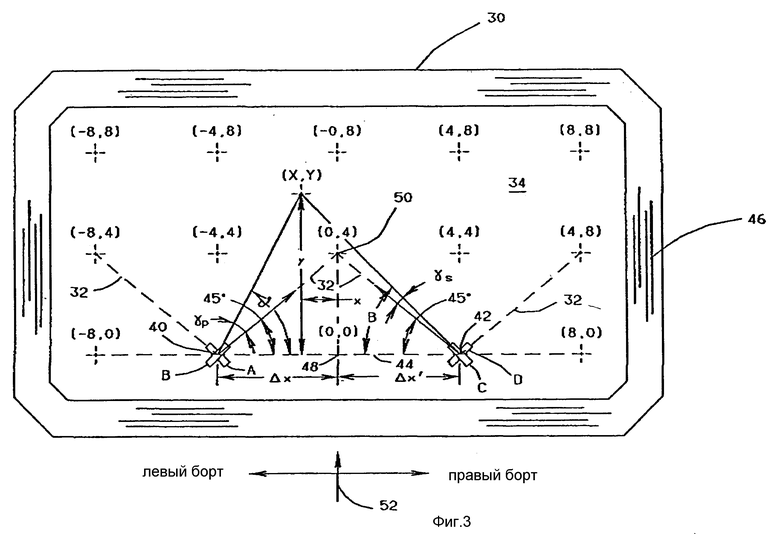
На фиг. 3 приведен вид сверху соответствующего изобретению сенсорного блока, схематически иллюстрирующий положение сенсорных катушек с их угловым взаимным расположением и определенное соотношение между магнитным полем локационного маркерного устройства и сенсорного блока.
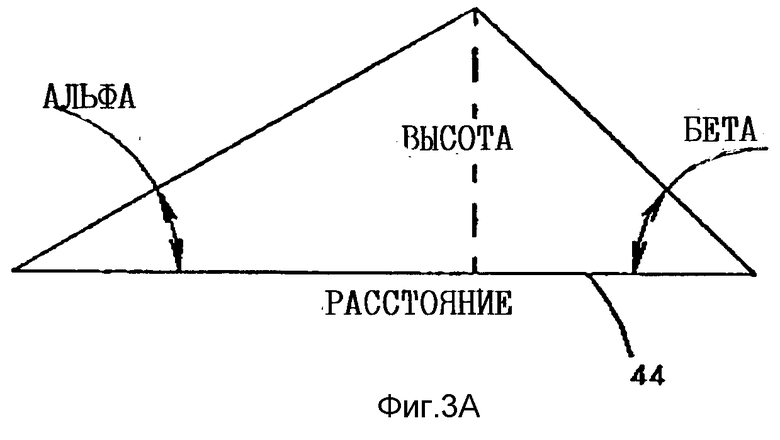
На фиг.3А показан треугольник, который будет использован для объяснения математических соотношений между сенсорными катушками и магнитным полем маркерного устройства.
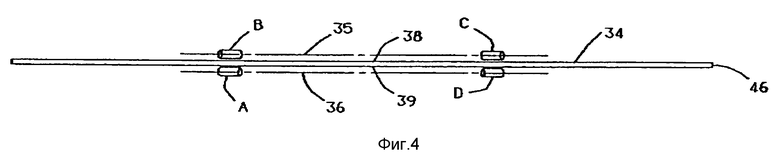
На фиг.4 изображен вид сбоку сенсорного устройства фиг.3.
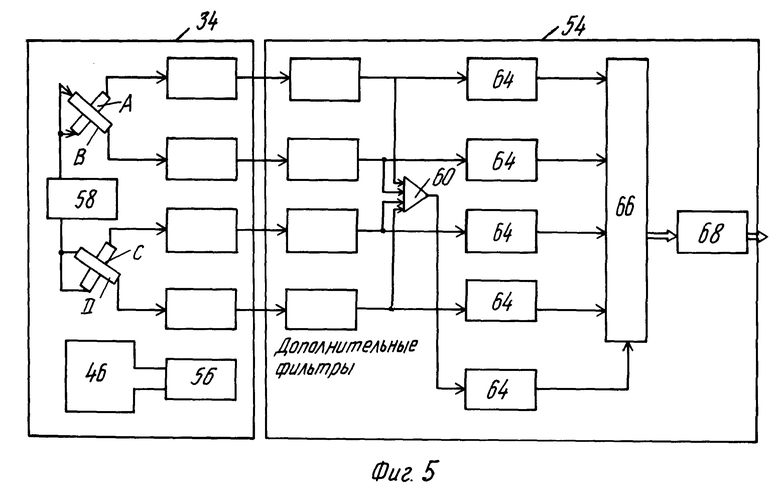
На фиг. 5 приведена блок-схема, на которой показаны элементы электрической схемы, использованные в соответствующем изобретению сенсорном блоке.
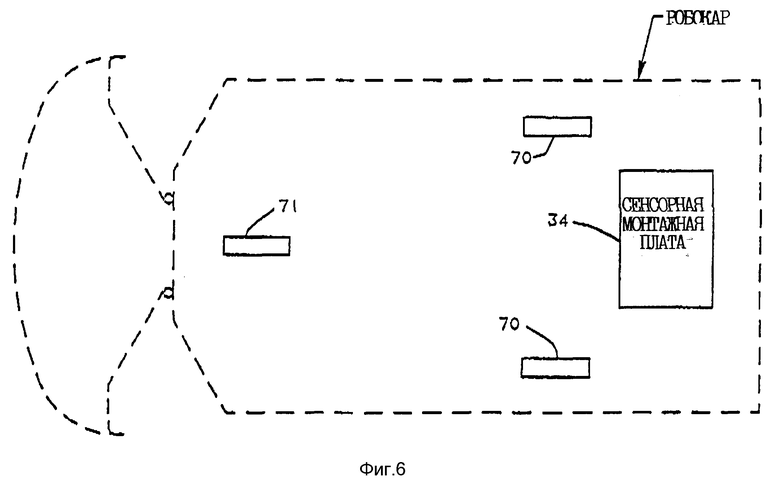
На фиг. 6 изображен вид сверху, схематически иллюстрирующий соответствующий изобретению сенсорный блок, установленный на подвижном транспортном средстве, таком как робокар.
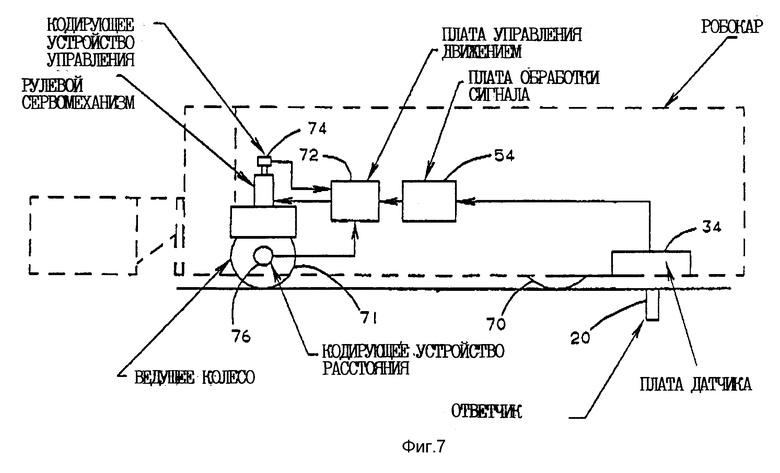
На фиг. 7 показан вид сбоку, иллюстрирующий соответствующий изобретению сенсорный блок в сочетании с другими элементами управления движением робокара.
На фиг.1 показано локационное маркерное устройство 10, состоящее из катушки, имеющей продольную ось 12, простирающуюся перпендикулярно плоскости чертежа. При возбуждении посредством источника переменного тока 14, подключенного к катушке через два ввода 15 и 16, катушка излучает магнитное поле, образованное магнитными силовыми линиями 18, исходящими радиально и дугообразно из концов продольной оси 12. Дугообразная диаграмма распределения этих магнитных силовых линий иллюстрируется также фиг.2. На фиг.1 показаны только некоторые из этих силовых линий. В действительности эти магнитные силовые линии бесчисленные и при рассмотрении сверху, как на фиг.1, образуют магнитное поле в форме тороида неопределенного размера и с центром с нулевым диаметром.
Альтернативная форма локационного маркерного устройства 20 показана на фиг. 2, где это устройство 20 содержит ответчик с катушкой 22, а в варианте осуществления содержит также микросхему 24 для регулирования уровня выходного сигнала катушки 22. Обычно ответчик является пассивным устройством. Когда катушка 22 индуктивно возбуждается внешним источником соответствующей частоты, излучается магнитное поле, образованное силовыми магнитными линиями 26, исходящими из противоположных концов катушки 22. Микросхема 24 встроена в ответчик кодового типа и вырабатывает единственный (однозначный) информационный сигнал, который передается по крайней мере периодически. Такие кодовые ответчики имеются в продаже, например TELSOR, модель 1787, изготавливаемый фирмой Telsor Corporation. При использовании локационных маркерных устройств 10 и 20 с навигационными системами транспортного средства они обычно устанавливаются с расположением их продольных осей перпендикулярно поверхности 28 (фиг.2), по которой перемещается транспортное средство.
Соответствующий изобретению сенсорный блок 30 показан на фиг. 3 и 4. Этот сенсорный блок 30 содержит четыре идентичные сенсорные (считывающие) катушки A-D, каждая из которых воспринимает частоту магнитного поля маркерного устройства и имеет основную ось 32. Эти сенсорные катушки установлены на панели 34, преимущественно образованной монтажной платой, в виде двух пар катушек А, B и C, D. Основные оси 32 сенсорных катушек A-D расположены в параллельных плоскостях 35 и 36 (фиг.4), которые простираются в поперечном направлении относительно продольной оси маркерного устройства, в случае установки сенсорного блока на подвижном транспортном средстве. Основная ось каждой из катушек А и D лежит в одной из двух параллельных плоскостей, а основная ось каждой из катушек В и С лежит в другой из двух параллельных плоскостей. В показанной на фиг.3 и 4 конструкции панель 34 имеет противоположно направленные главным образом параллельные поверхности 38 и 39, причем катушки В и С установлены на одной из этих поверхностей 38, а катушки А и D установлены на другой из этих поверхностей 39.
Основные оси сенсорных катушек A-B и C-D каждой пары установлены X-образно, при этом основная ось одной катушки каждой пары идет перпендикулярно основной оси другой катушки каждой (этой) пары. Так, например, основные оси катушек А и В пересекаются друг с другом в среднем положении их длины и образуют центр 40 для пары сенсорных катушек А и В. Аналогичным образом основные оси катушек C и D пересекаются друг с другом в среднем положении их длины и образуют центр 42 для пары сенсорных катушек C и D. Центры 40 и 42 пар катушек смещены друг от друга на фиксированное расстояние вдоль базовой линии 44, которая пересекается основными осями каждой из сенсорных катушек под углом 45 градусов.
Когда используется маркерное устройство в виде ответчика 20, требуется энергия возбуждения для того, чтобы ответчик 20 мог передавать свой сигнал. Эта энергия преимущественно обеспечивается антенной 46 или петлей возбуждения, образованной на монтажной плате панели 34. Поэтому антенна 46 в основном копланарна (лежит в параллельной плоскости) относительно основных осей сенсорных катушек A-D, а магнитные силовые линии, излучаемые антенной, главным образом перпендикулярны плоскости панели 34. Петля антенны охватывает сенсорные катушки A-D, и так как плоскость монтажной платы панели 34 простирается в поперечном направлении относительно основной оси катушки ответчика, то ответчик может быть запитан в пределах зоны чувствительности сенсорного устройства.
Для дальнейшего иллюстрирования и объяснения изобретения панель 34 фиг.3 определена в прямоугольных координатах, основанных на выбранной зоне чувствительности 8'' х 16''. Средняя точка 48 базовой линии 44 расположена между центрами 40 и 42 двух пар катушек (в данном примере это соответствует расстоянию 8''). Вертикально над этой точкой 48 расположено местоположение (геометрическое место точек) 50, определенное взаимным пересечением основных осей катушек B и C, причем это местоположение 50 представляет собой точку 4'' на оси Y системы координат. Максимальный сигнал будет получен любой из сенсорных катушек A-D в случае нахождения источника магнитной энергии непосредственно на линии, совпадающей с основной осью катушки. Аналогичным образом минимальный сигнал будет получен от источника магнитной энергии, перпендикулярного основной оси катушки.
С целью разделения сигналов от четырех катушек с учетом их знаков для каждой катушки определено направление "вперед" (прямое направление), которым является направление по основной оси катушки в желательную зону чувствительности панели 34. Это прямое направление указано стрелкой 52 на фиг.3. Любой сигнал, полученный от источника перед катушкой А и слева (по левому борту) от катушки В, определяет знак сигнала катушки А как отрицательный. Аналогично, любой сигнал от источника, расположенного перед катушкой D, справа (по правому борту) от катушки С, определяет знак сигнала D как отрицательный. Знак сигнала от катушки B будет положительным, если источник сигнала расположен напротив катушки B и справа (по правому борту) от катушки A. Знак сигнала от катушки C положительный, если источник расположен напротив катушки C и слева (по левому борту) от катушки D.
Базируясь на величине и знаке этих четырех сигналов от катушек А, В, С и D и на двух тригонометрических тождествах, могут быть вычислены перемещение X (плюс или минус 8'') и перемещение Y (от 0 до 8''), как это объясняется ниже со ссылкой на фиг.3А. Показанный на фиг.3А треугольник имеет базовое расстояние, которое равно расстоянию между центрами 40 и 42 пар катушек A-B и C-D. Другими словами, "расстояние" по этой линии такое же самое, как и для базовой линии 44 фиг.3.
Первое использованное тригонометрическое тождество гласит, что высота треугольника может быть найдена из размера его основания и его двух основных углов следующим образом:
Высота = Расстояние / [СОТ (Альфа) + СОТ (Бета)].
Допустим, что высота треугольника представляет желательное перемещение Y, а его основание является известным расстоянием 8 дюймов между парами сенсорных катушек. Тогда перемещение Y может быть вычислено, если известны углы Альфа и Бета. Однако при решении этой задачи каждый из указанных углов является комбинацией двух углов, а именно, как показано на фиг.3
Альфа = 45o+Гамма слева,
Бета = 45o+Гамма справа.
Для выходных сигналов (А, В, С или D) двух пар сенсорных катушек известно, что
СОТ (Гамма слева) = В/-А,
СОТ (Гамма справа) = C/-D.
Второе использованное тригонометрическое тождество гласит, что
СОТ (45o - угол) = [СОТ(угол)+1]/ [СОТ(угол) - 1].
Это тождество позволяет получить желательный СОТ Альфа и Бета в значениях СОТ Гамма слева и Гамма справа, если использованы отрицательные величины этих углов:
СОТ (- Гамма слева) = В/А,
СОТ (- Гамма справа) = C/D.
Тогда
СОТ (Альфа) = СОТ (45- (- Гамма слева) =
[СОТ(- Гамма слева)+1]/[СОТ (-Гамма слева) - 1] = [(В/А)+1]/[(В/А) - 1] = [(В+А)/А]/[(B-A)/А] = (В+А)/(B-A)
и
СОТ (Бета) = СОТ (45- (- Гамма справа) =
[СОТ (-Гамма справа)+1]/[СОТ (-Гамма справа) - 1] = [(C/D)+1]/[(C/D) - 1] = [(C+D)/D]/[(C-D)/D] = (C+D)/(C-D).
В результате получим
Y= (Расстояние)/[СОТ (Альфа)+СОТ (Бета)] = (8 дюймов)/[(В+А)/(B-A) + (C+D)/(C-D)].
Так как расстояние базы треугольника дано в дюймах и выходные сигналы сенсорных катушек безразмерные, то результирующее значение Y будет тоже в дюймах.
Так как теперь величина Y известна, то величина X может быть вычислена следующим образом:
СОТ (Альфа) = Дельта X /Y, где (из фиг.3)
X = Дельта X - 4 или Дельта X = X + 4.
Аналогично
СОТ (Бета) = Дельта X'/Y, где (из фиг.3)
X = Дельта X' - 4 или Дельта X' = 4 - X.
При подстановке получим
Y. СОТ (Альфа) = X + 4 или X = (Y. СОТ (Альфа))-4,
Y. СОТ (Бета) = 4 - X или X = 4 - (Y. СОТ (Бета)).
Для повышения точности, когда Альфа или Бета становятся слишком малыми, добавляются уравнения Альфа и Бета, затем результат делится на два и полученный результат разрешается относительно X:
2. X = (Y. СОТ (Альфа)) - 4 + 4 - (Y. СОТ (Бета)),
X = (Y/2). (СОТ (Альфа))-СОТ (Бета)).
В результате получим
X= Y/2. [(В + А)/(В - А) - (C + D)/(С - D)].
На фиг. 5 схематически показана блок-схема схемных средств, предназначенных для получения сигнала положения от каждой из сенсорных катушек A-D в ответ на прохождение ими через магнитное поле маркерного устройства. Так как магнитное поле, улавливаемое катушками A-D, очень мало в сравнении с полем возбуждения, то на сенсорной монтажной плате 34 установлены фильтры и усилители, которые усиливают сигналы катушек перед их поступлением на плату 54 обработки сигнала. На сенсорной монтажной плате 34 также установлены источник мощности (возбудитель) петли антенны 56 и схемы (источники) калибровки 58. Четыре сигнала с выхода катушек A-D проходят через дополнительные фильтры на плате обработки сигнала 54. В том случае, когда маркерным устройством является кодовый ответчик, четыре сигнала с катушек A-D суммируются вместе на входе усилителя 60 для образования пятого сигнала, который используется для извлечения однозначного кода опознания ответчика. Этот сигнал затем пропускается через широкополосный фильтр 62 для сохранения частотной кодовой информации. Четыре сигнала с выхода катушек A-D пропускаются через четыре независимых узкополосных фильтра 64 для сохранения только информации положения от маркерного устройства. Затем четыре сигнала положения подвергаются синхронному детектированию при помощи четырехканального аналого-цифрового преобразователя 66. Пятый сигнал используется в качестве фазового опорного сигнала для АЦП 66. При этой обработке удается выделить как амплитуду, так и знак четырех сигналов положения.
Кодовый ответчик 20 запрограммирован таким образом, чтобы передавать сигнал единственной частоты вслед за частотным кодом. Эта единственная частота передается в течение короткого времени перед новым сеансом передачи частотного кода. Указанная единственная частота позволяет повысить точность измерения четырех сигналов положения. Микрокомпьютер (микропроцессор) 68, установленный на плате обработки сигнала 54, прежде всего декодирует код ответчика перед измерением четырех сигналов положения. Для повышения точности множество результатов измерения сигналов положения усредняется в течение временного периода поступления единственной частоты. Затем микрокомпьютер 68 определяет местоположение ответчика 20 при помощи математической триангуляции, объясненной выше. После этого микрокомпьютер 68 посылает код ответчика и координаты местоположения X и Y в навигационный компьютер или другое устройство для дальнейшего использования этих сигналов в соответствии с видом подвижного транспортного средства и элементами последнего, подлежащими управлению.
На фиг. 6 и 7 иллюстрируется применение изобретения для управления робокаром. На фиг.6 показана сенсорная монтажная плата 34 (плата датчика), которая установлена позади задних колес 70 трехколесного робокара, имеющего переднее рулевое колесо 71. Вид сбоку робокара показан на фиг.7. Сенсорная плата 34 подключена к плате обработки сигнала 54, выход микрокомпьютера 68 которой подключен к плате управления движением 72. Эта плата управления движением 72 получает также входные сигналы от рулевого кодирующего устройства 74, которое дает угловое положение рулевого колеса 71, и от кодирующего устройства расстояния 76, которое сообщает расстояние от точки старта, пройденное робокаром. Когда сенсорная плата 34 проходит вблизи ответчика 20, происходят обработка и усреднение результирующих сигналов от сенсорных катушек A-D в плате обработки сигнала 54. В данном виде применения изобретения выходные сигналы обычно определены, когда величина сигнала координаты Y составляет около 4'', так как в этом случае геометрический центр или местоположение 50 сенсорной платы наиболее близок к продольной оси ответчика 20. Результирующие величины координат X и Y поступают на плату 72 управления движением, которая определяет любую необходимую коррекцию курса робокара и выдает эту информацию на рулевой механизм.
В другом применении изобретения величины координат X и Y могут быть использованы для управления отдельными элементами подвижного транспортного средства. Например, если есть желание использовать изобретение для определения положения (позиционирования) автопогрузчика с вилочным захватом относительно груза или поддона, оборудованного ответчиком, то выходной сигнал, соответствующий величине координаты X, может быть использован для управления или выравнивания погрузчика относительно груза. Сигнал координаты Y может быть использован для вертикальной установки вилочного захвата в желательное положение для подъема груза.
Другие возможные применения изобретения легко могут быть найдены специалистами в данной области.
Изобретение относится к устройствам для определения положения подвижного транспортного средства. Достигаемый технический результат - вычисление по сигналам положения значений координат объекта относительно неподвижного локационного маркерного устройства. Маркерное устройство включает в себя катушку, излучающую магнитное поле. Сенсорный блок, установленный на транспортном средстве, содержит четыре одинаковые сенсорные катушки, установленные двумя парами, их основные оси расположены с одной из двух сторон центральной плоскости и идут параллельно ей, причем указанная плоскость простирается в поперечном направлении относительно продольной оси катушки маркерного устройства. Каждая пара катушек установлена Х-образно таким образом, что основные оси составляющих пару катушек пересекают друг друга перпендикулярно, посредине их длины и образуют центр пары. Две пары катушек установлены так, что их центры смещены относительно друг друга на фиксированное расстояние вдоль базовой линии, которую основные оси катушек пересекают под углом 45o. 2 c. и 17 з. п. ф-лы, 7 ил.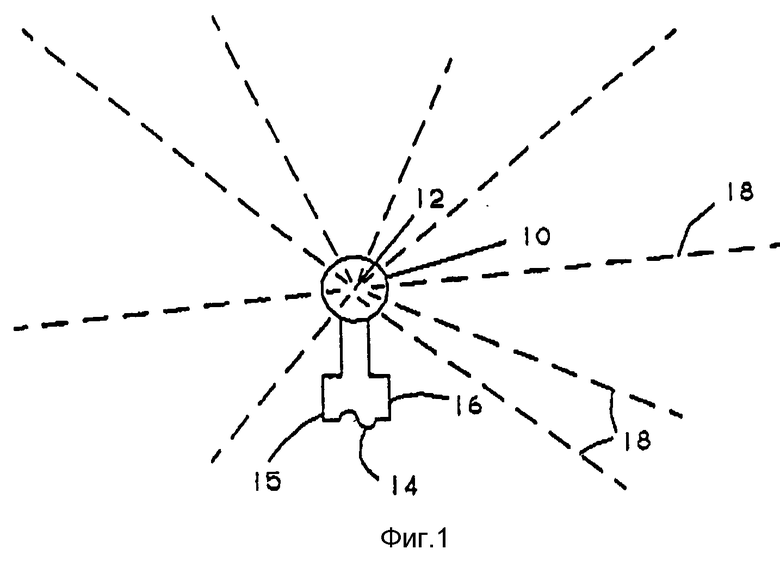
| Скородумов С.А | |||
| и др | |||
| Помехоустойчивая магнитоизмерительная аппаратура.-Л.: Энергоиздат, 1981, с.95-97 | |||
| Устройство для измерения переменной магнитной индукции | 1977 |
|
SU721784A1 |
| US 4109199 A, 22.08.78 | |||
| Устройство для управления встречно параллельно соединенными вентилями | 1985 |
|
SU1330717A1 |
