Изобретение относится к системе судового вспомогательного оборудования, в частности к средствам измерения виброакустических параметров вспомогательного оборудования. Может быть использовано для оценки технического состояния вспомогательных механизмов, а также для установления причин и уровней значений вибрации судовых редукторов в эксплуатации.
Одним из шагов развития удаленного управления безэкипажного (автономного) судна, является, в первую очередь, оценка технического состояния судовых технических средств безразборным и безвахтенным способом в эксплуатации. Безразборный метод контроля в технической эксплуатации является одним из наиболее эффективным способов снижения аварийности и повышения надежности судового вспомогательного оборудования. Эксплуатация судовых вспомогательных механизмов включает применение вибрационного контроля, по которому можно оценить техническое состояние в процессе эксплуатации. В связи с этим вибрационный контроль является актуальным видом контроля в настоящее время.
Судовые редуктора устанавливаются на различных типах морских судов и входят в состав главной энергетической установки широкого мощностного ряда. Во вспомогательных системах в составе грунтонасосной установки, например на земснарядах. Приводом судовых редукторов может быть двигатель внутреннего сгорания (ДВС), электродвигатель, так и газотурбинный двигатель. Техническая эксплуатация судовых редукторов включает все виды технического обслуживания и ремонта, по которому можно оценить состояние оборудования на основе применения неразрушающего контроля.
Известны технические решения, включающие способы обработки и контроля вибрационных параметров машин их элементов.
Известен способ вибродиагностики машин патент РФ №2314508 G01M 15/00 (2006.01), G01M 7/02 (2006.01) «Способ вибродиагностики машин», опуб. 10.01.2008, бюл. №1. Этот способ основан на измерении параметров виброакустических сигналов, отвечающих за характерные дефекты и неисправности с использованием допустимых значений и корректируя их, в собственно, частотных составляющих временной и спектральной реализации сигнала. Однако техническое состояние самой машины, в общем, по параметрам вибрации в широкой и узкой полосе частот, нормы, которых указываются в нормативных документах, не учитывается.
Известен способ диагностики подшипников по параметрам вибрации патент РФ №2209410 G01M 13/04 (2000.01) «Способ диагностики подшипников», опуб. 27.07.2003 Бюл. №21. Этот способ основан на расчете характерных частот элементов подшипниковых узлов с применением введения дополнительных маркеров отвечающих за доминирующий вклад виброакустического сигнала и его преобразования методом Фурье в частотный спектр, на котором выделены частоты, которые вносят вклад в общую энергию вибрации подшипника для оценки состояния подшипника. Однако все эти действия направленные за контролем общим уровнем вибрации, который не всегда зависит от технического состоянии подшипника и будет увеличиваться или уменьшаться при изменении режима эксплуатации самого механизма.
Известен способ диагностики зарождающихся дефектов механизмов по параметрам вибрации: патент РФ №2680640 G01M 13/04 «Способ вибродиагностики зарождающихся дефектов механизмов» опуб. 25.02.2019, Бюл. №6. Этот способ основан на измерении вибрационных ускорений, их полосовой фильтрации с выделением в усредненных энергетических спектрах огибающих вибрационных ускорений и определении энергетического спектра вспомогательных корабельных механизмов (подшипников, насосов, электродвигателей и других роторных механизмов). В способе применяется решающие правила детектирования многомерных признаков местоположений и амплитудных значений для исправного состояния механизма и их сопоставления с эталонами. Все расчеты, преобразования, правила, сравнивание всех методов и значений различных параметров вибрации не учитывают уже устоявшиеся методы контроля технического состояния судовых механизмов и их конструктивных особенностей.
За прототип принят способ контроля параметров вибрации судового оборудования патент РФ №2682839 G01/L 5/16 «Способ контроля технического состояния судового дизель-генератора в эксплуатации» опуб. 21.03.2019, Бюл. №9. Способ относится к диагностике судового энергетического оборудования в эксплуатации по параметрам вибрации. В способе замеряют параметры вибрации судового дизеля, который является современным среднеоборотным и высокооборотным двигателем работающим, как на классическом топливе по циклу Дизеля, так и на газомоторном топливе по циклу Отто и генератора, установленных на мягких опорах. Анализируются параметры вибрации со всех датчиков и при превышении пределов эксплуатационных уровней вибрации в любом из указанных направлениях хотя бы одного из датчиков, меняют режим эксплуатации, до тех пор, пока значения вибрации не войдут в пределы эксплуатационных уровней. Такой способ определяет оптимальный режим эксплуатации, что не приводит к остановке и простою оборудования. Однако в способе решена задача мониторинга судового энергетического оборудования как дизель-генератор.
Техническая задача предлагаемого изобретения является контроль технического состояния по параметрам вибрации судового редуктора в эксплуатации и, как следствие, повышение надежности его в целом.
Для достижения поставленной задачи предложен способ контроля технического состояния судового редуктора в эксплуатации, путем получения и обработки вибросигнала в вертикальном, осевом, поперечном направлениях, значений виброускорения и виброскорости с датчиков, отличающийся тем, что устанавливают датчики на корпусе в местах подшипниковых опор и лапах редуктора жестко установленных на корпусе судна - всего в количестве от 2 до 6 датчиков, получают сигналы в вертикальном, осевом, поперечном направлениях от всех датчиков, которые преобразуют в узкополосные спектры виброускорения и виброскорости, причем, с датчика, установленного в количестве от одного до двух на корпусе в местах подшипниковых опор, преобразуют во всех указанных направлениях в узкополосные спектры виброускорения и виброскорости и фиксируют значения виброускорения и виброскорости в пределах, в которых находятся вибрационные параметры подшипниковых узлов и зубчатых механизмов редуктора, с датчиков, установленных в количестве от двух до четырех на лапах со всех сторон судового редуктора преобразуют во всех указанных направлениях в узкополосные спектры виброскорости и фиксируют значения виброскорости в пределах, которых находятся вибрационные параметры собственной частоты судового редуктора, при этом, если зафиксированное значение параметров вибрации в любом из указанных направлениях хотя бы с одного датчика превысит пределы эксплуатационных уровней вибрации, то уменьшают нагрузку на редуктор с шагом 10-15% от существующей нагрузки до того, как зафиксированные значения параметров вибрации во всех указанных направлениях со всех датчиков войдут в пределы эксплуатационных уровней вибрации, при этом замер проводят через 1-2 минуты и повторяют замер после изменения нагрузки на судовой редуктор, если нагрузка на судовой редуктор была изменена.
Технический результат заключается в установлении оптимального режима нагрузки и контроля технического состояния судового редуктора в эксплуатации на основе полученных параметров вибрации, а именно, значений, виброускорения и виброскорости на соответствующих частотах режимах работы элементов подшипниковых узлов, зубчатых механизмов и на лапах редуктора.
Технический результат достигается совокупностью всех признаков как в ограничительной, так и в отличительной частях формулы изобретения. Установление оптимального режима нагрузки, контроль технического состояния судового редуктора в эксплуатации обеспечивается с помощью полученных параметров вибрации, с датчиков, установленных на судовом редукторе, а именно значений виброускорения, виброскорости, виброперемещения на соответствующих частотах работы элементов, механизмов и самого судового редуктора.
Предлагаемый способ обеспечивает контроль параметров вибрации судового редуктора в эксплуатации.
Согласно предлагаемому способу, происходит получение вибросигнала в вертикальном, осевом, поперечном направлениях с датчиков, установленных на элементах подшипниковых узлов, зубчатых механизмов и лапах судового редуктора.
С датчика, установленного в количестве от одного до двух на корпусе в местах подшипниковых опор судового редуктора получают временные сигналы в вертикальном, осевом, поперечном направлениях преобразуют во всех указанных направлениях в узкополосные спектры виброускорения, виброскорости и фиксируют значения виброускорения, виброскорости на соответствующих частотах:
- оборотная частота fo и ее гармоники 2fo, 3fo ведущего вала судового редуктора fo=n/60, где n это число оборотов ведущего вала судового редуктора, которое меняется от нагрузки судового редуктора;
- оборотная частота fв и ее гармоник 2fв, 3fв ведомого вала судового редуктора fв=fo/i1, где i1 это передаточное число редуктора;
- частота тел качения ведущего вала подшипника  , частота перекатывания тел качения по внешнему кольцу ведущего вала подшипника
, частота перекатывания тел качения по внешнему кольцу ведущего вала подшипника  и частота перекатывания тел качения по внутреннему кольцу ведущего вала подшипника
и частота перекатывания тел качения по внутреннему кольцу ведущего вала подшипника  где α, D, d, n габариты ведущего подшипника (угол соприкосновения, диаметр дуги, диаметр ролика, число роликов и число оборотов ведущего и ведомого валов судового редуктора, которые зависит от нагрузки судового редуктора);
где α, D, d, n габариты ведущего подшипника (угол соприкосновения, диаметр дуги, диаметр ролика, число роликов и число оборотов ведущего и ведомого валов судового редуктора, которые зависит от нагрузки судового редуктора);
- частота тел качения ведомого вала подшипника , частота перекатывания тел качения по внешнему кольцу ведомого вала подшипника
, частота перекатывания тел качения по внешнему кольцу ведомого вала подшипника  и частота перекатывания тел качения по внутреннему кольцу ведомого вала подшипника
и частота перекатывания тел качения по внутреннему кольцу ведомого вала подшипника  где α, D, d, n габариты ведомого подшипника (угол соприкосновения, диаметр дуги, диаметр ролика, число роликов и число оборотов ведомого вала судового редуктора, которые зависит от нагрузки судового редуктора);
где α, D, d, n габариты ведомого подшипника (угол соприкосновения, диаметр дуги, диаметр ролика, число роликов и число оборотов ведомого вала судового редуктора, которые зависит от нагрузки судового редуктора);
зубцовая частота шестерни ведущего вала f01=fo⋅Z1, где Z1 число зубьев шестерни ведущего вала и fo оборотная частота ведущего вала судового редуктора;
зубцовая частота ведомого вала f02=fв⋅Z2, где Z2 число зубьев шестерни ведомого вала и fв оборотная частота ведомого вала судового редуктора.
С датчиков, установленных в количестве от двух до четырех на лапах со всех сторон судового редуктора получают временные сигналы в вертикальном, осевом, поперечном направлениях преобразуют во всех указанных направлениях в узкополосные спектры виброскорости и фиксируют значения виброскорости на собственной частоте судового редуктора.
Сущность изобретения заключается в том, что установление оптимального режима нагрузки, контроль технического состояния судового редуктора в эксплуатации обеспечивается с помощью полученных параметров вибрации, с датчиков, установленных на судовом редукторе, а именно значений виброускорения, виброскорости, виброперемещения на соответствующих частотах работы элементов, механизмов и самого судового редуктора.
Изобретение поясняется чертежами, где
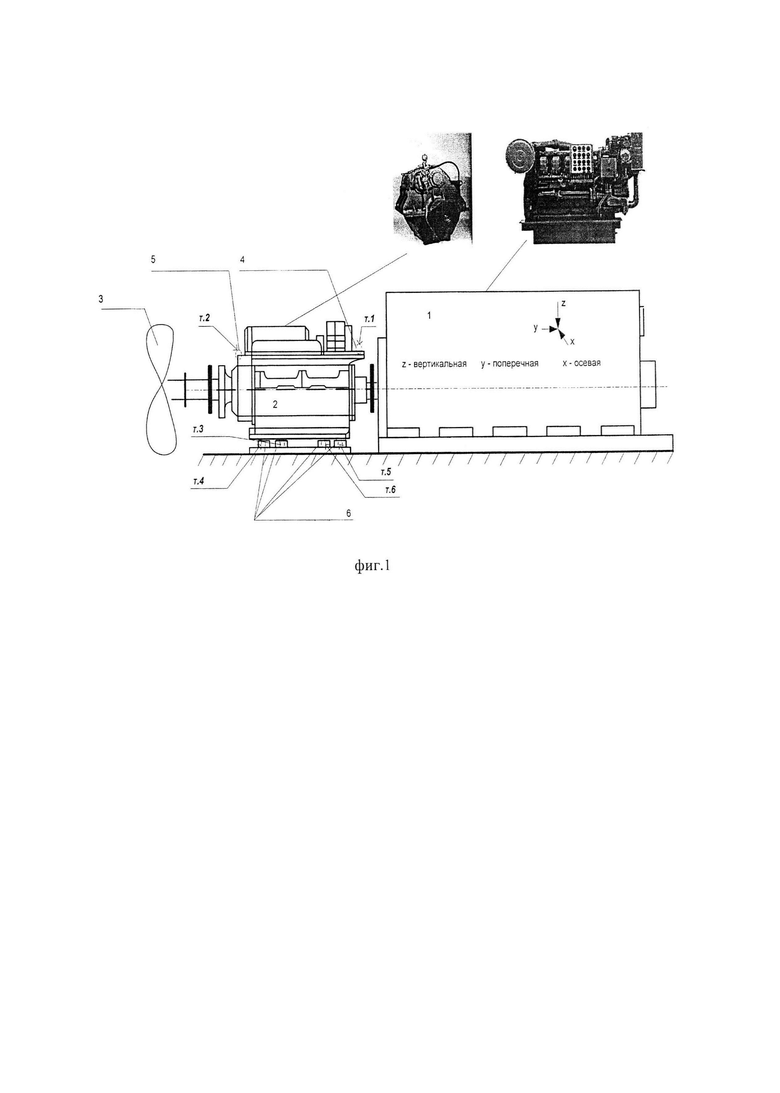
На фиг. 1 представлена принципиальная схема с указанием мест установки датчиков вибрации на судовом редукторе от привода двигателя внутреннего сгорания.
На принципиальной схеме изображено: 1 - двигатель (ДВС); 2 -редуктор; 3 - гребной винт; 4 - корпус ведущего подшипникового узла редуктора; 5 - корпус ведомого подшипникового узла редуктора; 6 - лапы редуктора.
Датчики вибрации установлены в следующих точках элементов: точках т.1, т.2 - на корпусе в местах ведущего и ведомого подшипниковых опор редуктора; т.3, т.4, т.5, т.6 - на лапах редуктора со всех сторон.
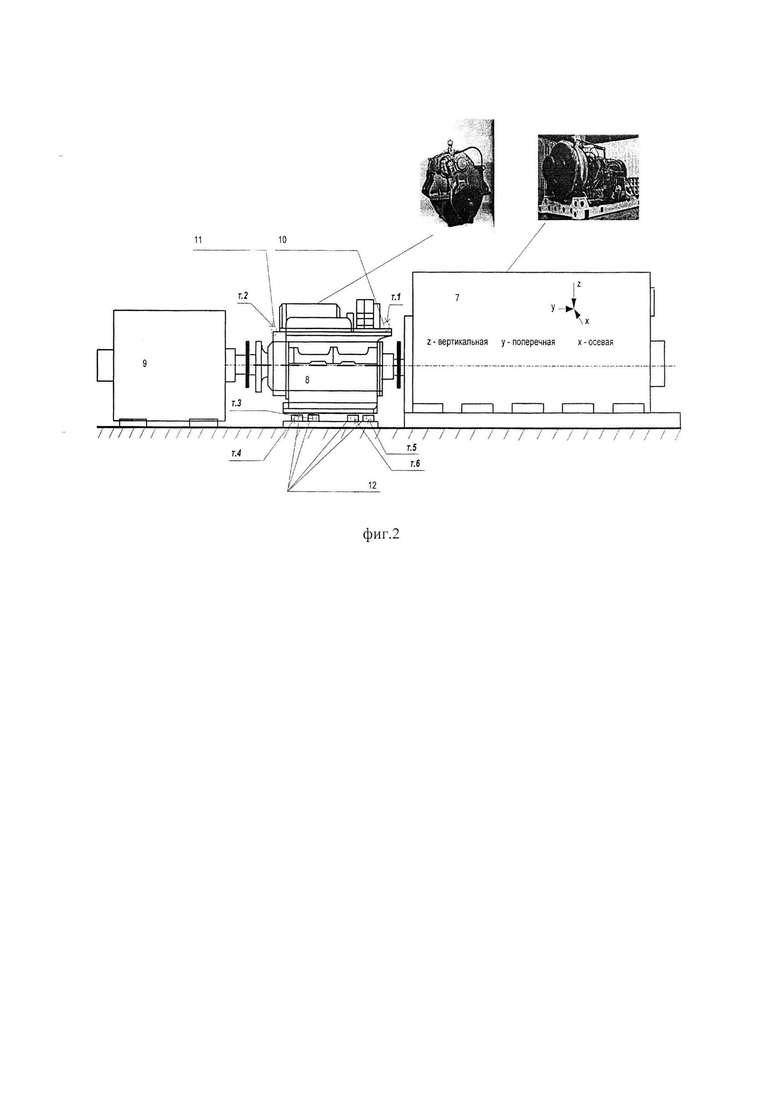
На фиг. 2 представлена принципиальная схема с указанием мест установки датчиков вибрации на судовом редукторе от привода газотурбинного двигателя.
На принципиальной схеме изображено: 7 - электродвигатель; 8 -редуктор; 9 - генератор; 10 - корпус ведущего подшипникового узла редуктора; 11 - корпус ведомого подшипникового узла редуктора; 12 - лапы редуктора.
Датчики вибрации установлены в следующих точках элементов: точках т.1, т.2 - на корпусе в местах ведущего и ведомого подшипниковых опор редуктора; т.3, т.4, т.5, т.6 - на лапах редуктора со всех сторон.
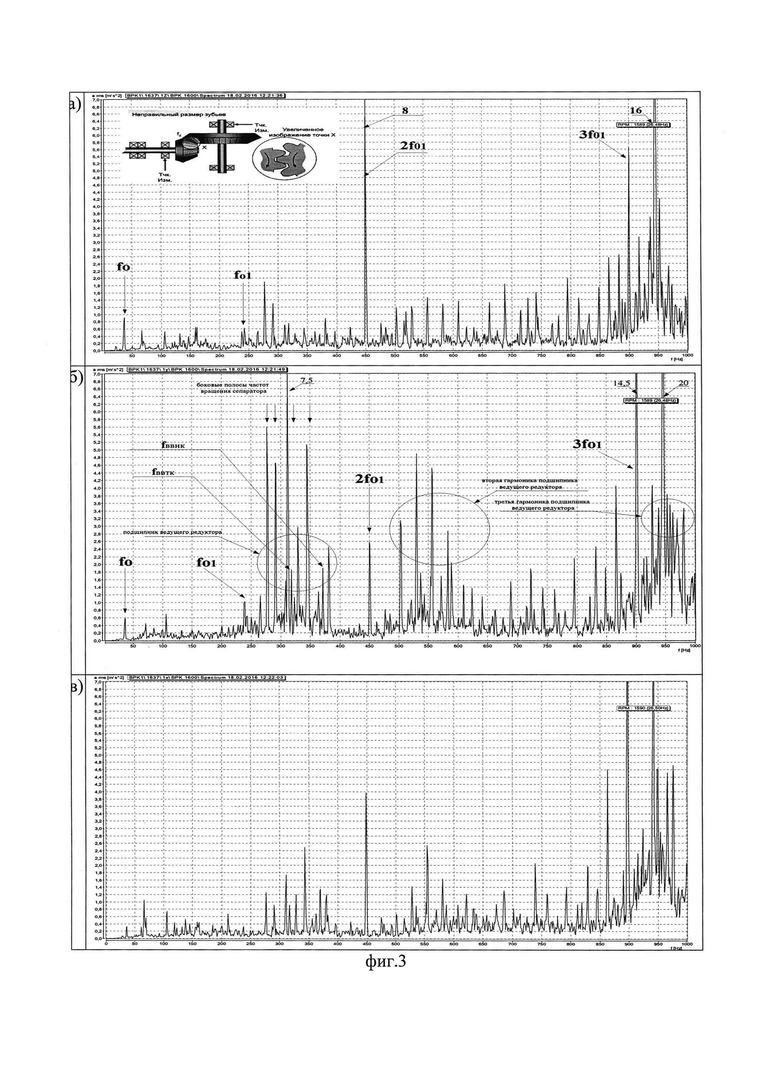
На фиг. 3, а, б, в показаны в качестве примера спектры виброускорения, во всех направлениях z, y, x на корпусе ведущего подшипникового узла 4 в точке т.1 с представленными соответствующими частотами работы судового редуктора.
Пример реализации способа контроля технического состояния судового редуктора в эксплуатации.
Судовой редуктор 2 прогрет и работает на холостом ходу. Затем судовой редуктор 2 нагружают до необходимого установившегося режима эксплуатации, например, 75% от номинальной мощности. Нагрузка на судовой редуктор 2 создается с помощью изменения оборотов, если в качестве привода используется двигателя (ДВС) 1 (фиг. 1). Если в качестве привода используется газотурбинный двигатель 7 с постоянной частотой вращения (фиг. 2), то нагрузка на судовой редуктор 8 создается с помощью генератора 9 судовой электростанции. Проводится замер параметров вибрации, полученных с датчиков в точках т.1-т.6, установленных на судовом редукторе. Если значения параметров вибрации находятся в пределах эксплуатационных уровней, то работа судового редуктора продолжается на этой нагрузке. Если зафиксированные значения параметров вибрации, хотя бы с одного датчика, превысят пределы эксплуатационных уровней вибрации в любом из указанных направлений, то уменьшают нагрузку судового редуктора на 10-15% от существующей нагрузки до того, как зафиксированные значения параметров вибрации со всех датчиков войдут в пределы эксплуатационных уровней, при этом замер проводят через 1-2 минуты и повторяют замер после изменения нагрузки на судовой редуктор, если нагрузка на судовой редуктор была изменена. Если параметры вибрации превышают пределы эксплуатационных уровней на всех режимах эксплуатации, то судовой редуктор останавливают.
Положительный эффект предлагаемого изобретения заключается в том, что он может быть использован при эксплуатации судна. Использование предлагаемого изобретения повышает надежность и снижение эксплуатационных расходов, связанных с незапланированным простоем из-за неисправностей элементов и механизмов и самого судового редуктора в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля технического состояния судового дизель-генератора в эксплуатации | 2018 |
|
RU2682839C1 |
| Способ контроля технического состояния судового поршневого компрессора в эксплуатации | 2023 |
|
RU2805778C1 |
| Способ контроля технического состояния судовых центробежных насосов в эксплуатации | 2020 |
|
RU2735108C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДИЗЕЛЬ-ГЕНЕРАТОРА ПРИ ЭКСПЛУАТАЦИИ | 2020 |
|
RU2753156C1 |
| Способ безразборной диагностики изменений технического состояния судовых рулевых устройств в результате воздействия ледовых нагрузок и устройство для его реализации | 2017 |
|
RU2655611C2 |
| Способ контроля технического состояния газопоршневого агрегата в эксплуатации | 2024 |
|
RU2837784C1 |
| Способ определения коэффициента эффективности вибрационной защиты виброизолирующих муфт судовых дизель-генераторов | 2019 |
|
RU2730694C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ СМАЗОЧНОЙ СПОСОБНОСТИ МАСЕЛ УЗЛОВ МЕХАНИЗМОВ | 1998 |
|
RU2138046C1 |
| Способ вибродиагностики зарождающихся дефектов механизмов | 2018 |
|
RU2680640C1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ И ПРОГНОЗИРОВАНИЯ ВНЕЗАПНОГО ОТКАЗА ДВИГАТЕЛЯ И НОСИТЕЛЬ | 2011 |
|
RU2484442C1 |
Изобретение относится к системе судового вспомогательного оборудования. Контроль осуществляют путем получения и обработки вибросигнала в вертикальном, осевом, поперечном направлениях значений виброускорения и виброскорости с датчиков. Устанавливают датчики на корпусе в местах подшипниковых опор и лапах редуктора, жестко установленных на корпусе судна. Получают сигналы в вертикальном, осевом и поперечном направлениях от всех датчиков. Сигналы преобразуют в узкополосные спектры виброускорения и виброскорости. Если зафиксированное значение параметров вибрации превысит пределы эксплуатационных уровней вибрации, то уменьшают нагрузку на судовой редуктор с шагом 10-15% от существующей нагрузки. Нагрузку уменьшают до того, как зафиксированные значения параметров вибрации войдут в пределы эксплуатационных уровней вибрации. Замер проводят через 1-2 минуты и повторяют замер, если нагрузка на судовой редуктор была изменена. Достигается повышение надежности за счет выбора оптимального режима нагрузки редуктора в процессе эксплуатации. 3 ил.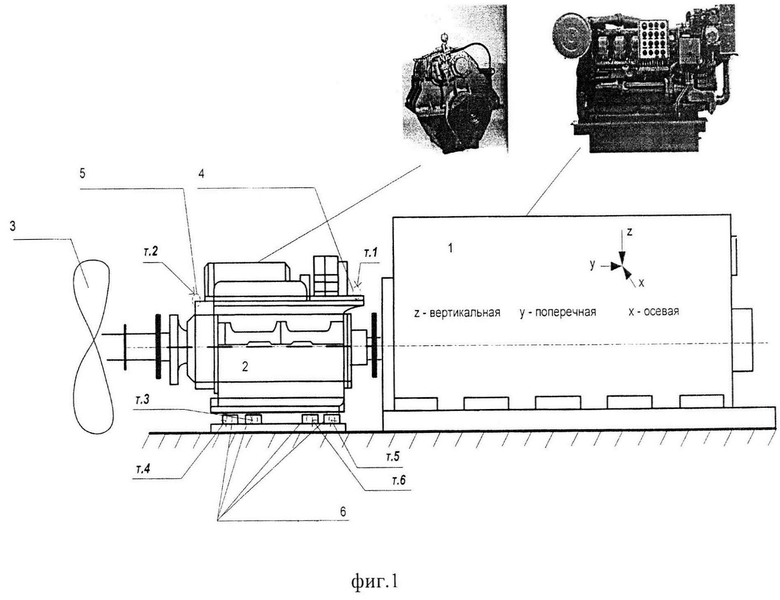
Способ контроля технического состояния судового редуктора в эксплуатации путем получения и обработки вибросигнала в вертикальном, осевом, поперечном направлениях значений виброускорения и виброскорости с датчиков, отличающийся тем, что устанавливают датчики на корпусе в местах подшипниковых опор и лапах редуктора, жестко установленных на корпусе судна - всего в количестве от 2 до 6 датчиков, получают сигналы в вертикальном, осевом, поперечном направлениях от всех датчиков, которые преобразуют в узкополосные спектры виброускорения и виброскорости, причем с датчиков, установленных в количестве от одного до двух на корпусе в местах подшипниковых опор, преобразуют во всех указанных направлениях в узкополосные спектры виброускорения и виброскорости и фиксируют значения виброускорения и виброскорости в пределах, в которых находятся вибрационные параметры подшипниковых узлов и зубчатых механизмов редуктора, с датчиков, установленных в количестве от двух до четырех на лапах со всех сторон судового редуктора, преобразуют во всех указанных направлениях в узкополосные спектры виброскорости и фиксируют значения виброскорости в пределах, в которых находятся вибрационные параметры собственной частоты судового редуктора, при этом если зафиксированное значение параметров вибрации в любом из указанных направлений хотя бы с одного датчика превысит пределы эксплуатационных уровней вибрации, то уменьшают нагрузку на судовой редуктор с шагом 10-15% от существующей нагрузки до того, как зафиксированные значения параметров вибрации во всех указанных направлениях со всех датчиков войдут в пределы эксплуатационных уровней вибрации, при этом замер проводят через 1-2 минуты и повторяют замер после изменения нагрузки на судовой редуктор, если нагрузка на судовой редуктор была изменена.
| Способ контроля технического состояния судового дизель-генератора в эксплуатации | 2018 |
|
RU2682839C1 |
| Способ контроля технического состояния редукторов горных машин по вибрационным нагрузкам | 1987 |
|
SU1481601A1 |
| US 9528629 B2, 27.12.2016 | |||
| KR 101868889 B1, 27.06.2018. | |||

