Способ контроля сопротивления контактных пар подвижных контактных устройств (ПКУ) относится к контрольно-измерительной технике, в частности к способам контроля малых сопротивлений и может быть использован в станкостроении, робототехнике при проектировании и изготовлении различных систем как гражданского, так и военного назначения: системы наблюдения, мониторинга, освещения; системы в морском флоте; системы в авиации, беспилотных летательных аппаратах; военно-транспортные системы, подъемные краны. Он может быть использован для контроля качества изготовления ПКУ.
ПКУ относятся к многоканальным токосъемным устройствам, используемым для передачи электрических сигналов управления и напряжений питания постоянного и переменного токов с неподвижной части изделия на подвижную и обратно. Причем, в общем случае, подвижная часть изделия может перемещаться по отношению к неподвижной по любой криволинейной траектории. ПКУ должны иметь низкие потери при передаче энергии, и устойчивость к дестабилизирующим факторам, которые характерны для динамических систем. Для передачи сигнала используются скользящие сплошные контакты, например, угольная щетка, роликовые контакты, шаровые контакты, а для повышения надежности передачи -избыточное число контактных пар. Суммарная мощность, передаваемая через ПКУ при предельных значениях токов, достигает значения десятков кВт, что обуславливает возможность значительных электрических потерь в скользящем контакте и нежелательный нагрев элементов ПКУ, работающего в замкнутом объеме. Существенное влияние на характеристики скользящего контакта, оказывают влажность и температура окружающей среды, атмосферное давление, а также механические (вибрационные, ударные) воздействия ослабляющие взаимодействие контактной пары скользящего контакта и, как следствие, вызывающие значительные колебания контактного сопротивления.
Каждая контактная пара (КП) конструктивно представляет из себя один контакт подвижный (например, кольцо на роторе из проводящего материала с нанесенным на него износостойким покрытием) и другой неподвижный (например, точечный или плоскостной контакт в виде щетки из проводящего, упругого материала, для обеспечения качественного прилегания к кольцу в процессе вращения ротора пружиной.
Качественное изготовление ПКУ предполагает обеспечение контактного сопротивления каждого контакта не более какой-то заданной величины в нормальных и рабочих условиях эксплуатации.
Известен метод эквивалентной мощности для определения и контроля электрического сопротивления тонкопленочного контакта (Лугин А.Н. Метод эквивалентной мощности для определения электрического сопротивления тонкопленочного контакта в условиях пространственной неоднородности распределения тока и потенциала Труды Международного симпозиума «Надежность и качество» том 2/2008). Этот метод используется для расчета сопротивления участков тонкопленочного контакта, при рассмотрении контакта в 3D измерении, когда распределение потенциала вдоль границ контактирования слоев неравномерно. Недостатком его является то что, этот способ только для случая, когда контролируемый объект и измерительная схема неподвижны друг по отношению к другу.
Известен способ измерения и контроля переходного сопротивления контакта к тонкопленочным резисторам с электродами (патент РФ №2312365 в Бюл. №34 от 10.12.2007) который заключается в том, что пропускают ток заданной величины через крайний и средний электроды тонкопленочного резистора с тремя электродами. Измеряют напряжение между средним и вторым крайним электродами. Переходное сопротивление контакта определяют по формуле:
где ϕв - измеренное напряжение;
I - ток заданной величины;
К - коэффициент, обратный коэффициенту a11 цепочечной матрицы, полученной в результате электрического моделирования контактной области.
Недостатком его является то что, модель движущихся контактов значительно сложней статической модели контактной пары и требует существенно большего количества точек для снятия замеров необходимых для расчета сопротивления контактной пары, что практически невозможно реализовать в реальных перемещающихся контактных устройствах.
Наиболее близким по технической сущности к заявленному объекту является метод контроля переходного электрического сопротивления (ГОСТ 9.302-88 ЕСЗКС. Покрытия металлические и неметаллические неорганические. Методы контроля). Он основан на измерении и сравнении переходного электрического сопротивления точечного контакта металлического образца с контролируемым покрытием и эталонного электрода. Переходное электрическое сопротивление измеряют по четырехпроводной схеме с использованием токовых и потенциальных проводников. Одну пару проводников (токовый и потенциальный) соединяют с образцом (в разных точках), вторую пару - с эталонным электродом. Переходное электрическое сопротивление определяют прибором для измерения сопротивления с непосредственным отсчетом или методом амперметра и вольтметра. Переходное электрическое сопротивление (R) в Омах вычисляют по формуле
где U - напряжение между потенциальными проводниками, В;
I - ток, протекающий по токовым проводникам, А.
За результат измерения принимают среднее арифметическое значение не менее трех измерений.
Его недостатком является то, что доступ непосредственно к отдельным частям контактных пар ПКУ, которые перемещаются друг по отношению к другу, находясь на разных частях объекта, ограничен. Поэтому полученные этим методом результаты будут иметь большую погрешность и невысокую достоверность контроля.
Задачей заявляемого изобретения является создание способа контроля сопротивления контактных пар ПКУ во всех условиях применения ПКУ, как в статическом, так и динамическом.
Это достигается тем, что, для обеспечения измерений сопротивления контактных пар в режиме движения, только на стороне статора ПКУ, (что существенно упрощает процесс измерения) выходы всех КП, находящиеся на роторе объединяют в одну точку и измерения параметров контролируемой контактной пары проводят с помощь любых двух других КП этого ПКУ. Сопротивление КП определяют по формуле  Контроль параметров КП проводят в различных режимах ее эксплуатации путем снятия профиля сопротивления, в зависимости от положения ротора относительно статора, и сравнения его с допустимым профилем, учитывающим особенности конструкции ПКУ.
Контроль параметров КП проводят в различных режимах ее эксплуатации путем снятия профиля сопротивления, в зависимости от положения ротора относительно статора, и сравнения его с допустимым профилем, учитывающим особенности конструкции ПКУ.
Суть изобретения заключается в том, что в процессе контроля сопротивления КП протекание тока через нее обеспечивают с помощью второй КП, а измерение падения напряжения на контролируемой КП - с помощью третьей КП; по результатам измерений вычисляют значения сопротивления контактной пары в различных положениях подвижной части объекта относительно неподвижной части его, и, снятый в процессе движения ПКУ профиль сопротивления КП, сравнивают с расчетным профилем КП и по результатам сравнения проводится оценка качества КП.
Технический результат заключается в существенном упрощении процесса контроля и обеспечении высокой достоверности результатов контроля при реализации предложенного способа.
Возможность осуществления изобретения подтверждается тем, что авторами проведено моделирование процессов измерения и экспериментальная проверка предложенного способа контроля.
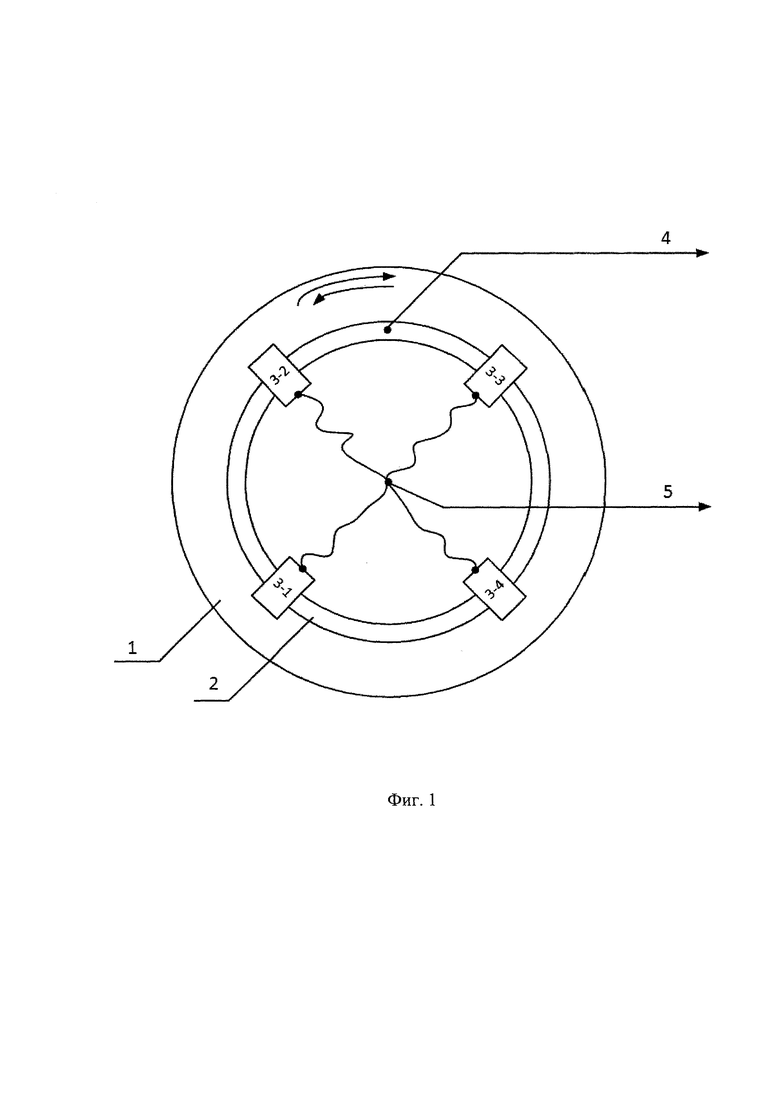
На фигуре 1 изображена одна контактная пара КП, состоящая из, например, подвижного диска 1, на который нанесена дорожка 2 (первый контакт КП) из электропроводящего материала, прикрепленного к ротору (подвижной части объекта) и четырех объединенных между собой (для повышения надежности контакта) щеток 3-1, 3-2, 3-3 и 3-4, (второй контакт КП), закрепленных на статоре (неподвижной части объекта). В общем случае щеток может быть от одной до N. Электрический выход 4 от электропроводящего кольца считается подвижным контактом КП. Электрический выход 5 от общей точки объединения всех щеток считается неподвижным контактом КП.
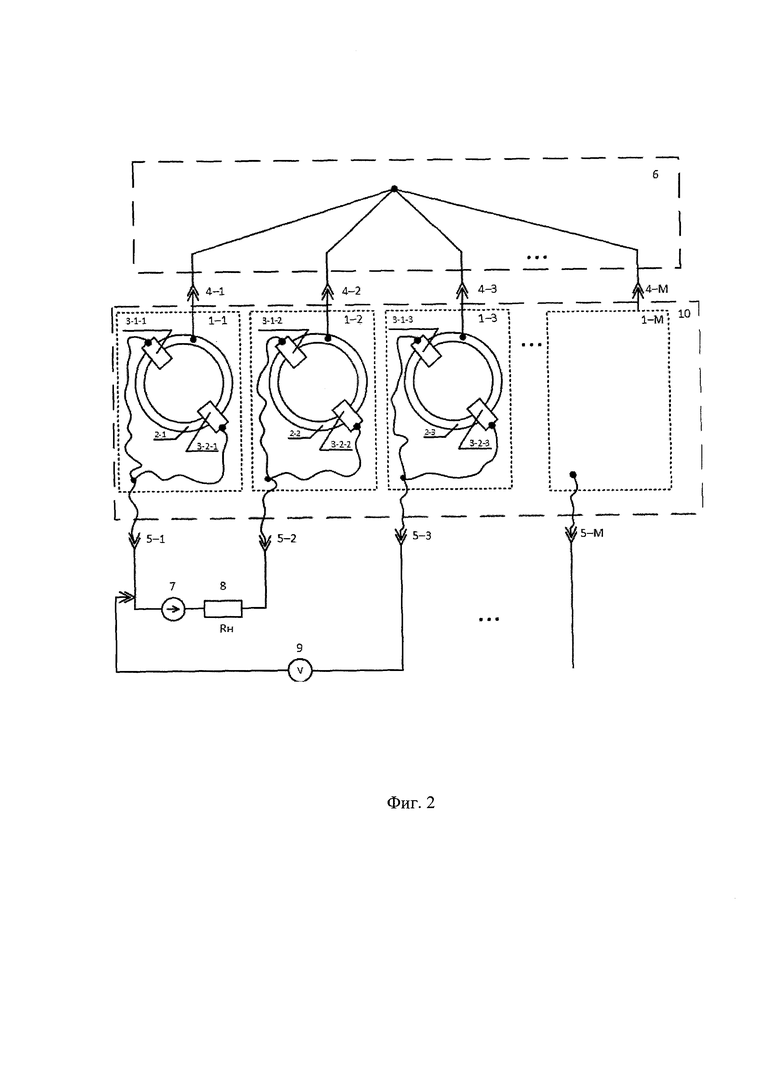
На фигуре 2 приведен пример электрической схемы подключения трех КП М-контактного ПКУ для пояснения способа контроля характеристик КП.
Где,
- 1-1 - 1-М - контактные пары КП от первой до М-ой;
- 2-1 - 2-М - токопроводящие дорожки, являющиеся подвижным контактом соответствующей КП;
3-1-i - 3-2-i - по две щетки соответствующей контактной пары (i изменяется от 1 до М);
4- 1 - 4-М - подвижные контакты соответствующей КП;
5-1 - 5-М - неподвижные выходы соответствующей КП;
6 - заглушка, объединяющая все подвижные выходы контактных пар в одну точку;
7 - источник напряжения, выходной сигнал которого равен Е;
8 - сопротивление нагрузки Rн, существенно превышающее сопротивление контролируемых КП и формирующее, таким образом, постоянный ток для обеспечения режимов измерения;
9 - вольтметр для измерения падения напряжения на контролируемой КП;
10 - перемещающееся контактное устройство ПКУ, на котором расположены все М контактных пар.
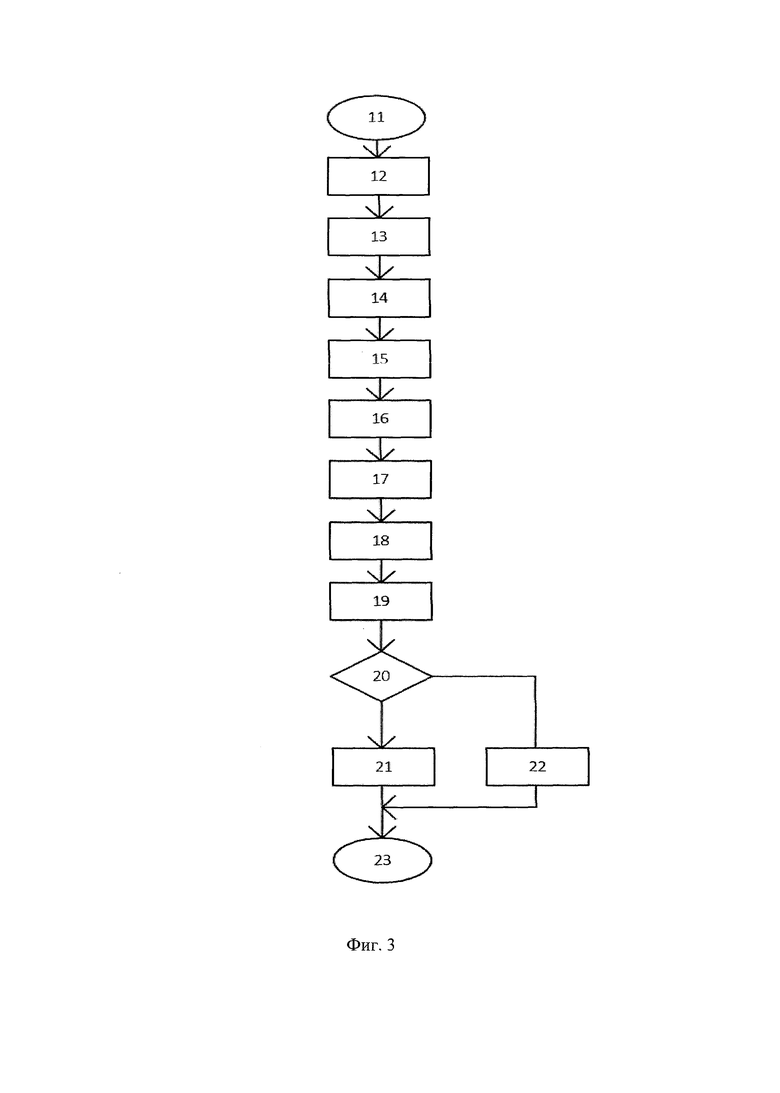
Способ контроля сопротивления КП перемещающихся контактных устройств иллюстрируется диаграммой, описывающей очередность выполнения операций контроля, приведенной на фигуре 3, где
11 - начало;
12 - задать режимы и условия контроля ПКУ: напряжение Е, ток I, скорость перемещения ротора ω, число m оборотов ротора необходимое для усреднения результатов при построении профиля КП и допустимое отклонение профиля;
13 - объединить все подвижные контакты М-контактного ПКУ;
14 - обеспечить протекание тока I заданной величины между неподвижным контактом контролируемой КП и неподвижным контактом другой КП;
15 - перевести в требуемый режим перемещения ротора по отношению к статору;
16 - контролировать падение напряжения на контролируемой контактной паре путем измерения разности потенциалов Ui между неподвижным контактом контролируемой КП и неподвижным контактом третьей контактной пары в каждом i-том положении ротора;
17 - сформировать профиль контролируемой КП, путем вычисления по формуле  сопротивления контролируемой КП в каждом i-том положении ротора по отношению к статору;
сопротивления контролируемой КП в каждом i-том положении ротора по отношению к статору;
18 - провести измерения за n оборотов ротора, проверяя условие i≥n;
19 - сформировать профили, соответствующие n оборотам ротора и построить усредненный профиль по средним значениям сопротивлений  в каждом положении ротора за n оборотов его;
в каждом положении ротора за n оборотов его;
20 - сравнить полученный усредненный профиль с расчетным профилем контролируемой КП, определяемым конструктивными особенностями ПКУ;
21 или 22 - по результатам сравнения, сделать вывод о качестве КП ПКУ, «годен» или «не годен»;
23 - конец.
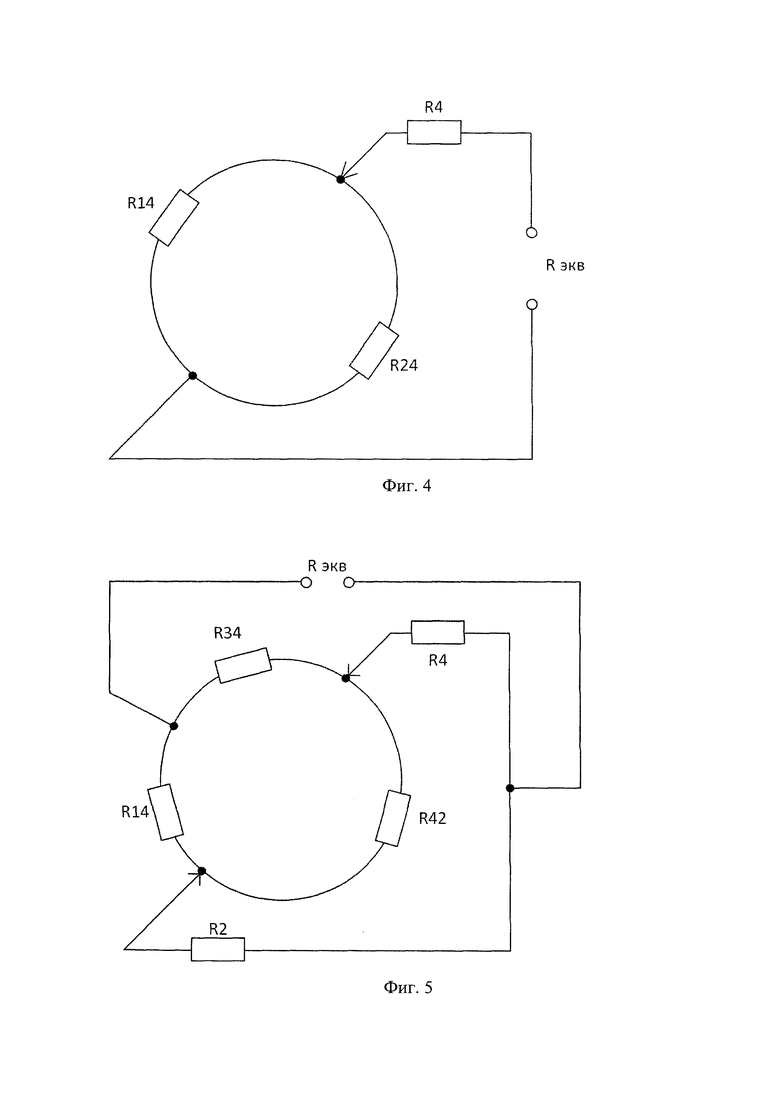
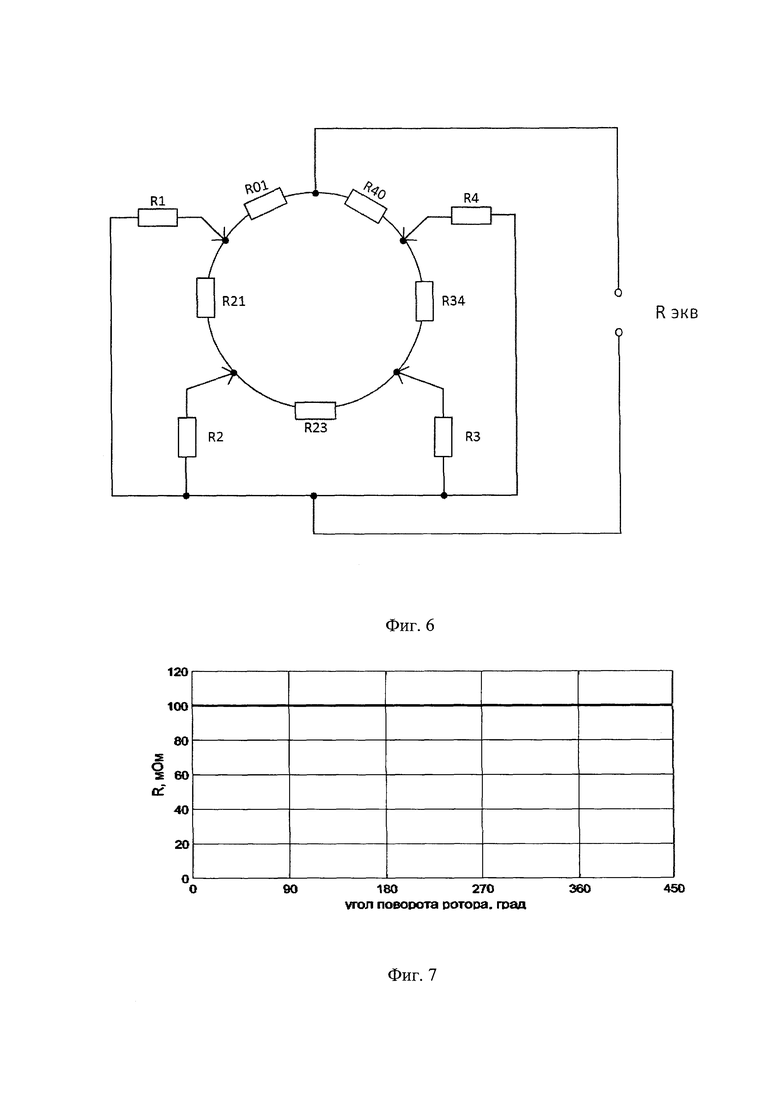
На фиг. 4, фиг. 5 и фиг. 6 приведены эквивалентные схемы одной контактной пары, где в качестве неподвижного контакта используется одна щетка, две щетки и четыре щетки, соответственно., и где
R1, R2, R3 и R4 - эквивалентное сопротивление щеток, неподвижного контакта КП;
Rij - эквивалентное сопротивление отдельных участков дорожки, подвижного контакта КП;
Rэкв - эквивалентное сопротивление КП.
На фиг. 7 приведен закон равномерного распределения сопротивления дорожки (идеальный случай), представляющий прямую линию, параллельную оси ординат.
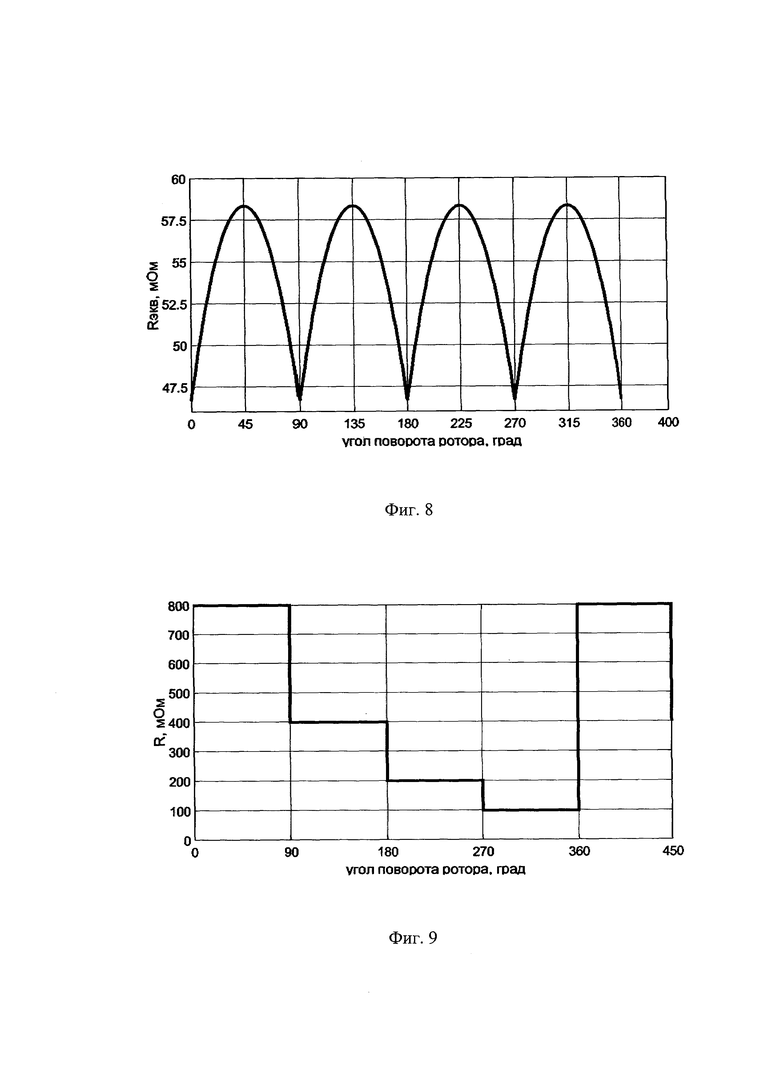
На фиг. 8 приведен график зависимости эквивалентного сопротивления КП от угла поворота ротора (идеальный случай, когда сопротивление дорожки ротора является величиной постоянной по всей длине, как на фиг. 7).
На фиг. 9 приведен пример изменения сопротивления дорожки по всей ее длине в случае некачественного ее исполнения.
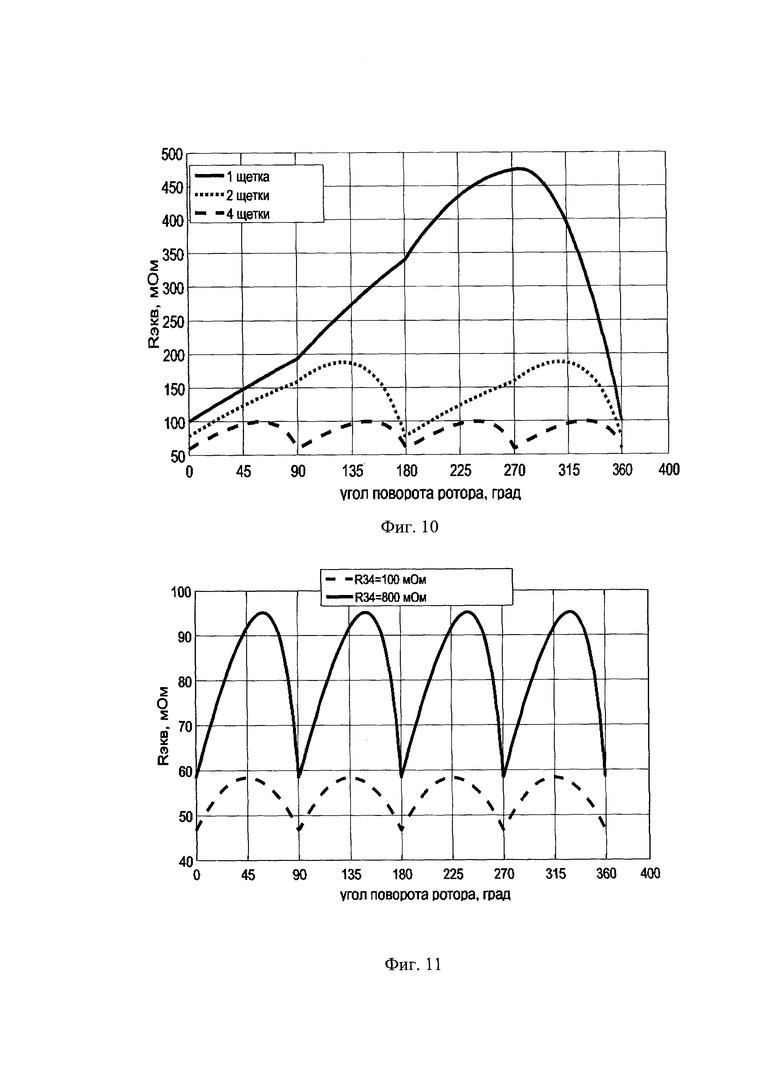
На фиг. 10 приведены графики зависимости эквивалентного сопротивления КП от угла поворота ротора, когда КП состоит из одной, двух или четырех щеток при дефекте дорожки таком, как это приведено на фиг. 9.
На фиг. 11 приведены графики зависимости эквивалентного сопротивления КП от угла поворота ротора при наличии и отсутствии дефекта дорожки на участке R34 фиг. 6
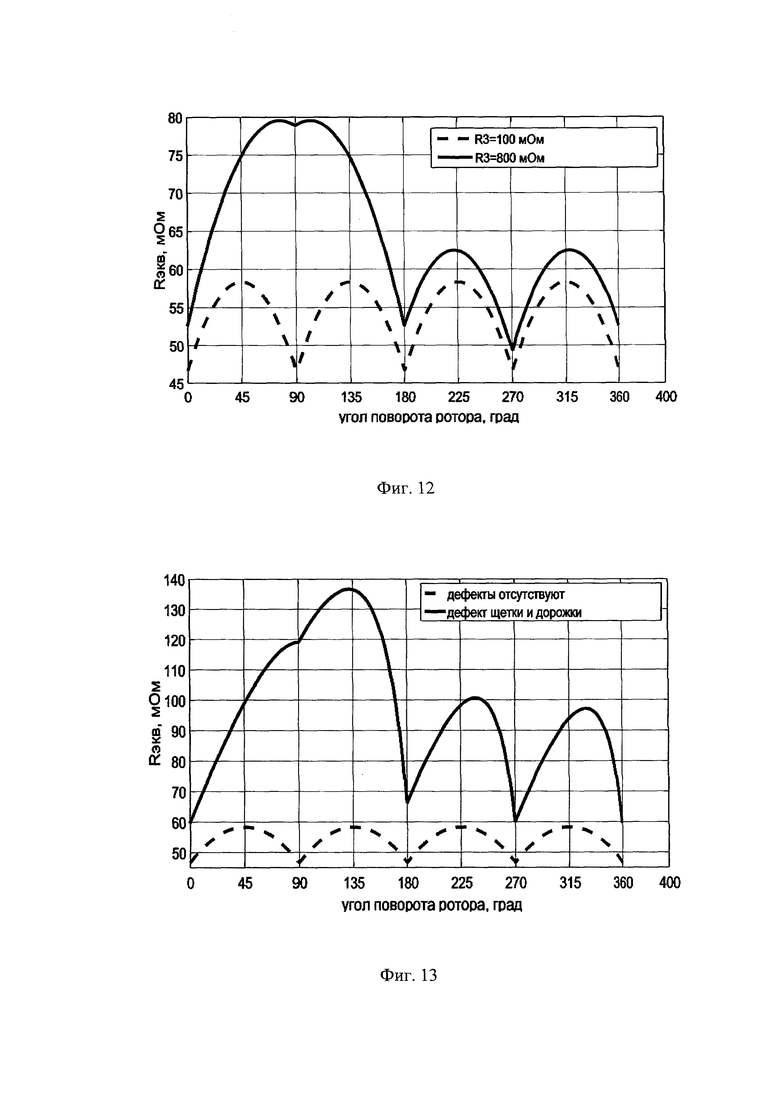
На фиг. 12 приведены графики зависимости эквивалентного сопротивления КП от угла поворота ротора при наличии и отсутствии дефекта третьей щетки R3 на фиг. 6
На фиг. 13 приведены зависимости эквивалентного сопротивления КП от угла поворота ротора при отсутствии и при наличии обоих дефектов (контакта и дорожки) на фиг. 6.
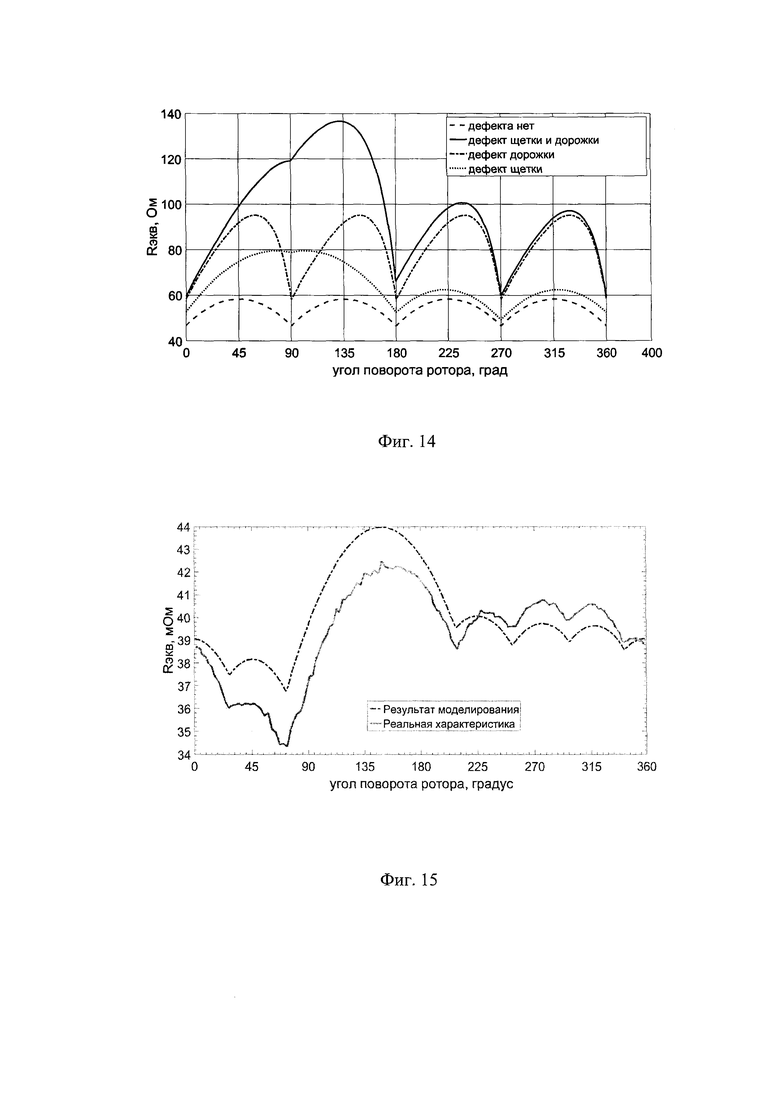
На фиг. 14 приведены зависимости эквивалентного сопротивления КП от угла поворота ротора при отсутствии и при наличии сочетаний всех видов дефектов (и контакта и дорожки) для схимы на фиг. 6.
На фиг. 15 приведен пример зависимости от угла поворота ротора сопротивления КП, которая выполнена на шести щетках, неравномерно расположенных по периметру дорожки перемещающегося диска реального ПКУ при отсутствии дефектов.
На фигуре 2 приведена схема, по которой поясняются особенности реализации предложенного способа. Дорожки 2-1 ÷ 2-М каждой контактной пары 1-1 ÷ 1-М соединены с подвижными контактами соответствующей КП. Подвижные выходы 4-1 ÷ 4-М всех контактных пар ПКУ 1-1 ÷ 1-М объединены заглушкой 6 между собой в одну точку. Щетки 3-1-1 и 3-2-1 ÷ 3-1-М и 3-2-М каждой КП подключены к неподвижным контактам 5-1 ÷ 5-М соответствующей КП. Неподвижный контакт 5-1 первой КП 1-1 подключен к первому входу источника напряжения 7, второй выход которого через резистор нагрузки 8 соединен с неподвижным входом 5-2 второй КП, расположенных на неподвижной части ПКУ 10. Вольтметр 9 подключен между неподвижными контактами 5-1 и 5-3 контактных пар 1-1 и 1-3.
Способ реализуется следующим образом (см. фиг. 2 и фиг. 3). Перед началом контроля определяют режимы, в которых будет проводиться контроль контактных пар ПКУ 10 - напряжение Е, ток I, скорость перемещения ротора со и допустимое отклонение профиля (зависимость сопротивления контактной пары от положения ротора относительно статора) контролируемой КП (в данном случае КП 1-1) от профиля, рассчитанного по конструктивным характеристикам этой КП. Объединяют заглушкой 6 все электрические выходы подвижных контактных пар контролируемого ПКУ10. Потом между неподвижными контактами 5-1 и 5-2 контролируемой КП1-1 и второй КП1-2 обеспечивают протекание тока I, при котором необходимо проводить контроль. Этот ток обеспечивается путем включения последовательно в электрическую цепь источника 7 с напряжением Е резистора нагрузки 8, существенно (в сотни - тысячи раз) превышающего сопротивление контролируемой контактной пары. После этого переводят ротор ПКУ 10, с находящимися на нем дорожками и подвижными контактами, в режим вращения с угловой скоростью ω. Подключают между неподвижным контактом 5-1 контролируемой КП 1-1 и неподвижным контактом 5-3 третьей контактной пары 1-3 вольтметр 9, и контролируют падение напряжения Ui на этой контактной паре. Такой способ подключения измерительных цепей обеспечивает четырехпроводную схему измерения участка электрической цепи от неподвижного контакта контролируемой КП до подвижного контакта ее. Измерения проводят непрерывно, и каждому i-тому положению ротора относительно статора приводят в соответствие значение сопротивления, вычисленного по формуле
Таким образом, строят профиль КП, представляющий собой зависимость сопротивления контактной пары от угла поворота ротора относительно статора. Формируют профили, соответствующие n оборотам ротора и строят усредненный профиль по средним значениям сопротивлений  в каждом положении ротора за n оборотов его. Сравнивают полученный профиль с расчетным профилем контролируемой КП 1-1, определяемым конструктивными особенностями ПКУ, путем вычисления отклонений сопротивления КП в каждой i-той точке профиля, полученных в результате измерений, от расчетного значения известного профиля. Если величина отклонения профиля от допустимого превышает заданную, то делается вывод о качестве КП или наличии дефекта конкретной щетки или участка дорожки, формирующих контролируемую контактную пару. В качестве вспомогательных второй и третьей КП могут использоваться любые другие две КП М-контактного ПКУ. Таким же способом контролируются остальные КП ПКУ, причем для организации цепей контроля используются любые КП, в том числе и ранее проконтролированные.
в каждом положении ротора за n оборотов его. Сравнивают полученный профиль с расчетным профилем контролируемой КП 1-1, определяемым конструктивными особенностями ПКУ, путем вычисления отклонений сопротивления КП в каждой i-той точке профиля, полученных в результате измерений, от расчетного значения известного профиля. Если величина отклонения профиля от допустимого превышает заданную, то делается вывод о качестве КП или наличии дефекта конкретной щетки или участка дорожки, формирующих контролируемую контактную пару. В качестве вспомогательных второй и третьей КП могут использоваться любые другие две КП М-контактного ПКУ. Таким же способом контролируются остальные КП ПКУ, причем для организации цепей контроля используются любые КП, в том числе и ранее проконтролированные.
Рассмотрим на примерах, как зависят профили КП ПКУ от различных дефектов узлов составляющих КП.
На фиг. 4, фиг. 5 и фиг. 6 приведены эквивалентные схемы одной контактной пары, где в качестве неподвижного контакта используется одна щетка, две щетки и четыре щетки, соответственно.
Выражение для вычисления эквивалентного сопротивления КП содержащей одну щетку (см. фиг. 4) будет
Выражение для вычисления эквивалентного сопротивления КП содержащей две щетки (см. фиг. 5), полученное после преобразования эквивалентной схемы, будет
Выражение для вычисления эквивалентного сопротивления КП содержащей четыре щетки: (см, фиг. 6), полученное после преобразования эквивалентной схемы, уже сложней и описывается следующей формулой:
Так как длина участка дорожки от щетки до вывода подвижного контакта величина переменная, зависящая от угла поворота ротора относительно статора, то все переменные Rij, входящие в формулы для вычисления эквивалентного сопротивления Rэкв в общем случае, в процессе вращения ротора, являются функциями от угла поворота ротора по отношению к статору. При этом даже, если сопротивление собственно дорожки одинаковое по всему периметру, (например, как на фиг. 7) эквивалентное сопротивление КП будет являться функцией угла поворота ротора по отношению к статору. Эта зависимость сопротивления четырехщеточной КП от угла поворота ротора приведена на фиг. 8 для случая, когда
R34=100 мОм; R23=100 мОм; R21=100 мОм
R14=R01+R40=100 мОм; R1=R2=R3=R4=100 мОм,
Как видно из графика, величина пульсаций сопротивления КП составляет для данного примера ±10 процентов от среднего значения сопротивления и они равномерно распределены в диапазоне 360 градусов.
Наличие дефектов отдельных частей КП приводит к искажению профиля по сравнению с расчетным. Если, например, сопротивление дорожки меняется по закону, приведенному на фиг. 9, то профили, определяющие закон изменения сопротивления КП, в зависимости от числа используемых в КП щеток будут соответствовать графикам, приведенным на фиг. 10. Анализ графиков показывает, что КП, выполненная на четырех щетках, имеет сглаженный профиль сопротивления и разброс значений от максимума до минимума 20%, а выполненная на одной щетке - до 450%. Причем среднее значение сопротивления тоже возрастает в 2-3 раза.
Если же дорожка с равным линейным сопротивлением R=100 мОм имеет дефект на сегменте 90 градусов, например, сопротивление R34=800 мОм, то профиль КП, имеющей четыре щетки будет существенно отличаться от профиля такой же КП с исправной дорожкой (фиг. 11). Возрастает как среднее значение сопротивления КП за оборот ротора, так и форма и амплитуда пульсаций.
Для случая, когда дорожка исправна, а дефект проявляется на одной из четырех щеток, например, R3=800 мОм, то, как мы видим на фиг. 12, профиль существенно исказился по сравнению с расчетным (при полностью исправной КП). Профиль имеет специфическую форму, связанную с отклонением сопротивления (износ, механические дефекты и т.п.) конкретной щетки от нормального.
Если КП имеет дефект дорожки и щетки (как совмещение двух вышеприведенных дефекта - R3=800 мОм, R34=800 мОм, то профиль ее еще более искажается (см. фиг. 13) и легко позволяет диагностировать вид и место неисправности.
На фиг. 14 приведены для сравнения профили КП с различными видами дефектов. Результаты сравнения профилей показывают, что контролируя среднее значение, форму и амплитуду пульсаций сопротивления КП в режиме вращения ротора ПКУ, можно с высокой достоверностью разбраковывать изделия и, даже определять вид и место неисправности. На фиг. 15 приведены усредненный профиль КП реального ПКУ и профиль модели идеальной КП. Каждая КП этого ПКУ выполнена в виде одной дорожки на диске ротора, соединенной с подвижным контактом КП, и шести щеток, закрепленных на неподвижной части ПКУ и электрически объединенных на неподвижном контакте КП. Причем конструктивной особенностью КП является то, что щетки неравномерно распределены по окружности дорожки. Это хорошо подтверждает профиль КП. Анализ профиля показывает, что число провалов на кривой равно шести (что соответствует количеству щеток), а амплитуда их, зависит от взаимного расположения щеток и положения их по отношению к ассиметричному электрическому отводу от дорожки к подвижному контакту.
Из приведенных примеров следует, что во первых, конструктивные особенности исполнения контактов КП приводят к тому, что сопротивление КП зависит от взаимного расположения статора по отношению к ротору, а во вторых, наличие дефектов отдельных частей КП приводит к искажению профиля по сравнению с расчетным. Это позволяет, контролируя по четырехпроводной схеме сопротивление КП между неподвижным и подвижным контактами, строить профиль ее, и, по величине отклонения его от типового оценивать качество или исправность КП. При этом аппаратная реализация подключения измерительной аппаратуры существенно упрощена, так как подключение происходит только к неподвижным контактам ПКУ.
Таким образом, заявляемый способ контроля сопротивления контактных пар ПКУ при минимальных аппаратных затратах обеспечивает качество и достоверность контроля сопротивления КП в различных режимах испытаний ПКУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контактное устройство для передачи электроэнергии между подвижными частями системы | 2021 |
|
RU2784659C1 |
| СПОСОБ ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ МЕЖДУ ПОДВИЖНЫМИ ЧАСТЯМИ ОБЪЕКТА | 2020 |
|
RU2738252C1 |
| ЩЕТОЧНО-КОНТАКТНЫЙ АППАРАТ ГЕНЕРАТОРОВ БОЛЬШОЙ МОЩНОСТИ | 2023 |
|
RU2830664C1 |
| Щеточно-контактный аппарат для генераторов большой мощности | 2022 |
|
RU2791280C1 |
| Контактный токосъемник | 1981 |
|
SU1003219A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОНТРОЛЕМ ФУНКЦИИ ЗАЗЕМЛЕНИЯ И СПОСОБ | 2010 |
|
RU2514420C1 |
| ВРАЩАЮЩЕЕСЯ КОНТАКТНОЕ УСТРОЙСТВО | 2004 |
|
RU2275721C2 |
| Контактный токосъемник | 1984 |
|
SU1206867A2 |
| Контактный токосъемник | 1983 |
|
SU1156179A2 |
| Устройство для многоточечного контроля параметров вращающегося объекта | 1981 |
|
SU1005231A1 |
Способ контроля сопротивления контактных пар перемещающихся контактных устройств (ПКУ) относится к контрольно-измерительной технике, в частности, к способам контроля малых сопротивлений. Технический результат заключается в упрощении процесса контроля и повышении достоверности результатов контроля. Суть изобретения заключается в том, что в процессе контроля сопротивления контактной пары многоканального ПКУ протекание тока через нее обеспечивают с помощью второй контактной пары, а измерение падения напряжения на контролируемой контактной паре - с помощью третьей контактной пары. По результатам измерений вычисляют значения сопротивления контактной пары в различных положениях подвижной части объекта относительно неподвижной части его, и снятый в процессе перемещения ПКУ профиль сопротивления КП сравнивают с расчетным профилем КП и по результатам сравнения проводят оценку качества КП. Контроль каждой контактной пары перемещающегося контактного устройства осуществляется с применением любых двух других контактных пар того же перемещающегося контактного устройства. 15 ил.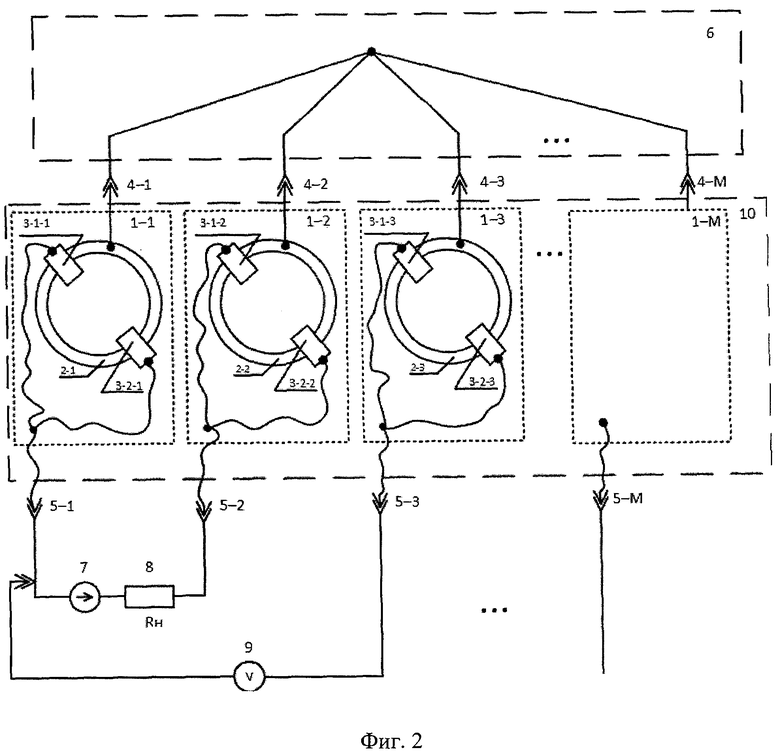
Способ контроля сопротивления контактных пар перемещающегося контактного устройства, состоящий в том, что через контролируемую контактную пару пропускают ток заданной величины, измеряют падение напряжения на ней, вычисляют сопротивление ее и сравнивают с допустимым, отличающийся тем, что объединяют все подвижные контакты М-контактного перемещающегося контактного устройства, обеспечивают протекание тока I заданной величины между неподвижным контактом контролируемой контактной пары и неподвижным контактом другой контактной пары, переводят в требуемый режим перемещения ротор по отношению к статору, после чего контролируют падение напряжения на контролируемой контактной паре путем измерения разности потенциалов Ui между неподвижным контактом контролируемой контактной пары и неподвижным контактом третьей контактной пары, формируют профиль контролируемой контактной пары, путем вычисления по формуле  сопротивления ее в каждом i-том положении ротора по отношению к статору за полный оборот ротора; формируют профили, соответствующие n оборотам ротора, и строят усредненный профиль по средним значениям сопротивлений
сопротивления ее в каждом i-том положении ротора по отношению к статору за полный оборот ротора; формируют профили, соответствующие n оборотам ротора, и строят усредненный профиль по средним значениям сопротивлений  в каждом положении ротора за n оборотов его, сравнивают полученный профиль с расчетным профилем контролируемой контактной пары, который определен конструктивными особенностями перемещающегося контактного устройства, и по результатам сравнения делают вывод о качестве контактной пары перемещающегося контактного устройства, причем контроль каждой контактной пары перемещающегося контактного устройства осуществляется с применением любых двух других контактных пар того же перемещающегося контактного устройства.
в каждом положении ротора за n оборотов его, сравнивают полученный профиль с расчетным профилем контролируемой контактной пары, который определен конструктивными особенностями перемещающегося контактного устройства, и по результатам сравнения делают вывод о качестве контактной пары перемещающегося контактного устройства, причем контроль каждой контактной пары перемещающегося контактного устройства осуществляется с применением любых двух других контактных пар того же перемещающегося контактного устройства.
| СПОСОБ ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ МЕЖДУ ПОДВИЖНЫМИ ЧАСТЯМИ ОБЪЕКТА | 2020 |
|
RU2738252C1 |
| US 9304015 B2, 05.04.2016 | |||
| US 6184695 B2, 06.02.2001 | |||
| US 20030011388 A1, 16.01.2003 | |||
| CN 102520250 A, 27.06.2012. | |||

