Способ передачи электроэнергии между подвижными частями объекта относится к электротехнике и энергетике, в частности к способам, которые обеспечивают непрерывную передачу энергии между отдельными блоками одного объекта, установленными с возможностью перемещения относительно друг друга, и находит применение в приборах и машинах, являющихся продукцией машиностроения, приборостроения, робототехники и других отраслей. Он может быть использован при проектировании сложных, высокоэкономичных, надежных механизмов и машин, а также в автоматизированных системах управления технологическими процессами, где необходимо передавать электроэнергию и электрические сигналы между движущимися друг относительно друга частями машины или оборудования.
Известен способ выполнения токосъема, реализованный в токосъемном устройстве по авторскому свидетельству СССР №936125, обеспечивающий передачу электроэнергии от неподвижной части к подвижной через токосъемные элементы установленные подпружинено к выступам вращающейся части с возможностью контактирования с последними постоянно, причем токосъемные элементы выполнены в виде двуплечих коромысел, закрепленных на неподвижной части с возможностью вращения, при этом постоянство контакта поддерживается тем, что одно плечо каждого коромысла электрически соединено с неподвижной частью, а другое плечо и выступ вращающейся части выполнены с возможностью эвольвентного зацепления друг с другом. Недостатком этого способа является то, что в контактной паре контакты при перекатывании один по другому существует трение качения, которое приводит к износу контактов со всеми возникающими от этого последствиями (ухудшение контакта из-за дребезга, влияние продуктов износа на электрические характеристики и т.п.)
Известен «Способ контроля токораспределения по комплектам щеток узла токосъема электрической машины и устройство для его осуществления» по патенту №2178609, который включает регистрацию через пары измерительных проводников падения напряжений на контрольных участках электрических цепей токоведущих шин. Регистрируют последовательно по замкнутому циклу для каждой токоведущей шины падения напряжения сначала на контрольном участке между началом токоведущей шины и первым комплектом щеток, затем на контрольном участке между последним комплектом щеток и концом каждой токоведущей шины, а после каждого описанного цикла регистрации вычисляют величины токов, потребляемых от токоведущих шин комплектами щеток. Недостатками его является то, что измерения проводятся при наличии скольжения контактов (и как следствие изменения их омического сопротивления), что может приводить к существенному искажению результатов контроля
Известен «Способ передачи измерительного сигнала через токосъемник и устройство для его осуществления» по патенту №2382454, который может быть использован для одновременной или также поочередной передачи измерительного сигнала и постоянного тока или тока промышленной частоты через токосъемное устройство с подвижными контактами для безопасной работы с измерительными цепями при этом. Для передачи информации с вращающегося объекта в способе обеспечивают разнесение спектров модулированного сигнала и спектральных составляющих тока промышленной частоты, применяют помехоустойчивые виды модуляции синусоидального сигнала, фильтрацию модулированного синусоидального сигнала, гальваническую развязку силовых цепей постоянного тока или тока промышленной частоты и цепей измерительного сигнала. Недостатком этого способа является сложность реализации и наличие возможности искажения информации и возникновения пульсаций в замыкаемых цепях из-за того, что скольжение одной контактной группы по другой, несмотря на принудительное прижатие их друг к другу, в силу разных причин (например, из-за изменения усилия прижатия или попадания продуктов износа контактов между движущимися контактами) приводит к нарушению качества контакта, т.е. колебанию его сопротивления.
Признаками аналогов, совпадающими с существенными признаками заявленного изобретения, является наличие контактов, прикрепленных к соответствующим частям объекта, и прижатых друг к другу для обеспечения надежного электрического контакта между движущимися частями объекта.
Наиболее близким по технической сущности к заявленному объекту является способ, описанный в патенте №2309497 «Способ токосъема и устройство для его осуществления», суть которого состоит в том, что продукты износа от скользящих контактов улавливают при выходе их из зоны скользящего контакта, воздействуя магнитным полем с последующим сбором продуктов износа на поверхности магнитного поля, и дополнительно улавливают полем центробежных сил, возникающих от вращения вала с кольцом контактной пары с последующим сбором на неподвижной периферийной внутренней магнитопроводящей поверхности. При этом состав магнитомягких композиционных материалов контактной пары подбирают таким, чтобы обеспечить минимальное количество продуктов износа при допустимых значениях коэффициента трения, переходного электрического сопротивления между скользящими контактами и уровня шумов в сигнальных цепях токосъемника, а продуктам износа технологическим путем обеспечивают в насыпном состоянии высокое омическое сопротивление.
Недостатком этого способа является сложность реализации и наличие возможности искажения информации и возникновения пульсаций в замыкаемых цепях из-за того, что скольжение одной контактной группы по другой, несмотря на принудительное прижатие их друг к другу и предпринятые меры по удалению продуктов износа контактов приводит к нарушению качества контакта, т.е. колебанию его сопротивления, а также к существенному сокращению срока службы его. Причем наличие трения между контактами приводит к дополнительным затратам энергии на преодоление силы трения и выделению тепла на трущихся контактах.
Причинами, препятствующими получению технического результата, являются наличие трения между движущимися контактами, которое приводит к повышенному и нестабильному сопротивлению контактной пары, высоким требованиям к механико-физическим свойствам материалов, из которых изготавливают контакты контактной пары, сокращению срока службы и повышенному износу контактов, перегреву объекта и снижению к.п.д. системы.
Задачей заявляемого изобретения является создание способ передачи электроэнергии между подвижными частями объекта, обеспечивающего высокое качество контакта и длительный срок службы его.
Это достигается путем того, что для уменьшения износа контактов и уменьшения переходного сопротивления контактных пар, скольжение или качение в них заменяется на процесс «шагания» одного контакта по другому.
Суть изобретения заключается в том, что контактную пару создают из нескольких контактов, находящихся на одной части объекта, часть которых (первая группа) прижимается к контактам второй части объекта, движущейся относительно первой по заданной траектории, а другая отжата. Через фиксированный интервал времени другая группа контактов первой части объекта прижимается к контактам второй части объекта, а первая группа отжимается от соответствующих контактов второй части объекта и возвращается в исходное положение на траектории движения контактной пары. Процедура повторяется до окончания работы устройства. Это обеспечивает постоянный электрический контакт между движущимися друг относительно друга частями объекта без трения контактов между собой.
Технический результат заключается в существенном снижении требований к качеству изготовления контактных площадок контактов контактных пар и физическим и химическим свойствам материалов, из которых они изготавливаются, существенном удлинении сроков эксплуатации контактных пар без ухудшения их характеристик, уменьшению мощности потерь между трущимися частями объекта и снижению температуры контакта в процессе эксплуатации.
При исследовании патентной и другой научно-технической информации заявителем не были обнаружены источники, в которых были бы приведены сведения о технических решениях, содержащих совокупность отличительных признаков предлагаемого способа. При этом известны технические решения, содержащие отдельные признаки заявляемого объекта, однако свойства и эффект, которые указанные признаки сообщают этим объектам, иные, чем в предлагаемом решении, поэтому указанные отличия являются существенными.
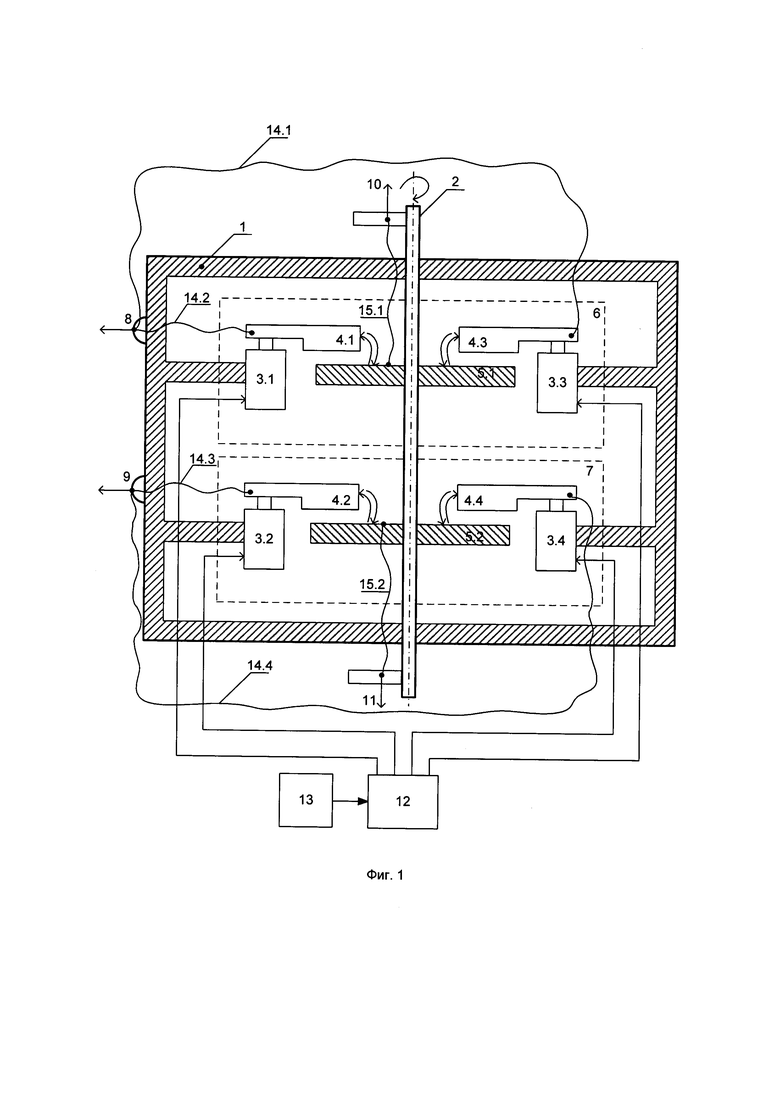
На фигуре 1 приведен пример структурной схемы устройства, на котором поясняются особенности реализации предложенного способа, где
1 - неподвижная часть объекта (статор),
2 - подвижная часть объекта (ротор),
3.1 и 3.3, 3.2 и 3.4 - механизмы прижатия и размыкания контактов в первой и второй контактных парах 6 и 7, соответственно, установленные на статоре
4.1 и 4.3, 4.2 и 4.4 - электропроводящие контакты, (щетки) шарнирно прикрепленные к статору, в первой и второй контактных парах 6 и 7, соответственно, и имеющие возможность двигаться, будучи прижатыми к дискам, по заданной траектории и возвращаться в исходное положение после потери контакта с диском,
5.1 и 5.2 - электропроводящие контакты (диски), закрепленные на роторе, первой и второй контактных пар 6 и 7, соответственно,
6 и 7 - первая и вторая контактная пара, соответственно (КП1 и КП2),
8 и 9 - статорные выходные электрические контакты первой и второй контактных пар 6 и 7, соответственно,
10 и 11 - роторные выходные электрические контакты первой и второй контактных пар 6 и 7, соответственно,
12 - блок формирования управляющих импульсов для механизмов 3.1-3.4 прижатия и размыкания контактов,
13 - синхронизатор работы контактов,
14.1-14-4 - гибкие проводники для соединения щеток с соответствующими статорными выходными контактами 8 и 9,
15.1-15.2 - гибкие проводники для соединения дисков с соответствующими роторными выходными контактами 10 и 11,
Объект состоит из неподвижной части (статора) 1 и подвижной части (ротора) 2, который крепится к статору и имеет степень свободы, обеспечивающую вращение его вокруг собственной оси. 3.1 и 3.3, 3.2 и 3.4 - механизмы прижатия и размыкания контактов, которые крепятся к статору 1 и управляют контактами 4.1-4.4. Эти контакты крепятся к статору 1 шарнирно так, что, будучи прижаты к дискам 5.1 и 5.2, они проходят вместе с ними часть траектории до поступления команды размыкания. Щетки 4.1 и 4.3, которые попеременно прижимаются диску 5.1, и щетки 4.2 и 4.4, которые попеременно прижимаются диску 5.2, образуют контактные пары 6 и 7, соответственно. К закрепленным на статоре статорным выходам 8 и 9,, соответствующих контактных пар 6 и 7 гибкими проводниками 14.1 и 14.2 подключены щетки 4.1 и 4.3 и гибкими проводниками 14.3 и 14.4 подключены щетки 4.2 и 4.4, соответственно. К закрепленным на роторе роторным выходам 10 и 11 гибкими проводниками 15.1 и 15.2 подключены диски 5.1 и 5.2. К управляющим входам механизмов прижатия и размыкания контактов 3.1-3.4 подключены выходы блока 12 формирования управляющих импульсов, вход которого соединен с выходом синхронизатора 13.
На фигуре 2 приведен в качестве примера вариант подключения через 5 (КП1) и 6 (КП2) к нагрузке 16 на роторе 2 источника энергии 17 на статоре 1.
На фигуре 3 приведена временная диаграмма управления режимом переключения щеток в процессе функционирования объекта,
где Т - период работы щеток при формировании контакта контактной пары,
t1 - интервал времени, после которого щетки второй группы прижимаются к движущимся дискам,
t2, t4 и t6 - интервал времени, в течение которого все щетки обеих групп прижаты к движущимся дискам,
t3 и t5 - интервал времени, в течение которого или первая или вторая группа щеток отключены от движущихся дисков,
R - электрическое сопротивление контактной пары КП.
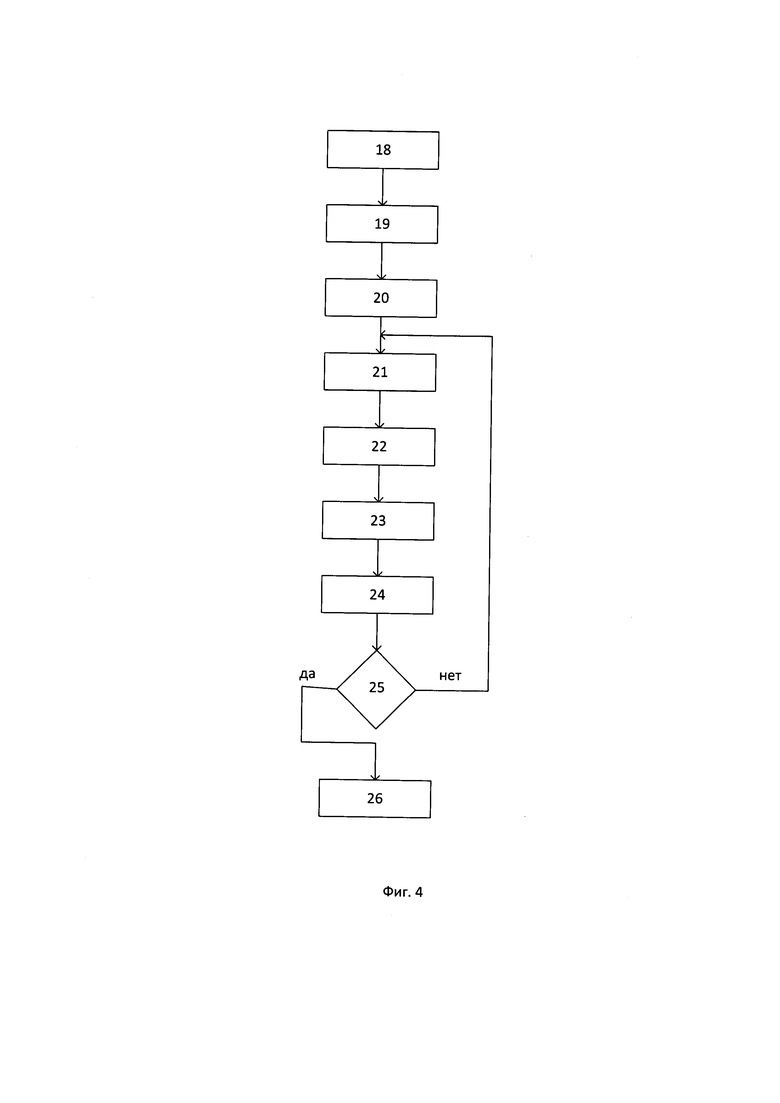
Способ передачи электроэнергии между подвижными частями объекта иллюстрируется диаграммой, описывающей очередность выполнения операций, приведенной на фигуре 4,
где 18 - начало, обе группы щеток находятся каждая на своей позиции по траектории движения частей объекта, в отключенном состоянии,
19 - после команды включения контактных пар первую группа щеток (контактов статора) прижимают к движущемуся непрерывному проводнику ротора,
20 - через интервал времени t1 прижимают к движущемуся непрерывному проводнику ротора вторую группу контактов
21 - через интервал времени t2 первую группу отключают(отжимают) от движущегося подвижного контакта (диска), и возвращают их на исходную позицию,
22 - через интервал времени t3 первую группу щеток прижимают к движущемуся непрерывному проводнику ротора и они движутся по его траектории совместно с ним,
23 - через интервал времени t4 вторую группу контактов отключают от движущегося подвижного контакта (диска), и возвращают их на исходную позицию,
24 - через интервал времени t5 вторую группу контактов прижимают, к движущегося подвижному контакту,
25 - проверяют условие наличия команды окончания работы и, если команды нет, то возвращаются к пункту 21, а если есть, - то к пункту 26,
26 - конец работы.
Способ реализуется следующим образом (см. фиг 1, 2, 3 и 4).
В исходном состоянии осуществляют, например, (см. фиг. 2) подключение нагрузки 16 на роторе 2, к источнику энергии 17, находящемуся на статоре 1 через две контактные пары 5 и 6 (фиг. 1). При этом обе группы щеток в каждой контактной паре находятся каждая на своей позиции по траектории движения частей объекта, в отключенном состоянии. Команды управления состоянием щеток вырабатывает синхронизатор 13 через блок 12 формирования управляющих импульсов для механизмов 3.1-3.4 прижатия и размыкания контактов. По команде включения контактных пар первая группа щеток (контактов статора) каждой контактной пары прижимается к движущемуся непрерывному проводнику ротора, и они движутся по его траектории совместно с ним в течение времени t1, после чего по команде синхронизатора 13 прижимается к движущемуся непрерывному проводнику ротора вторая группа контактов. При этом движение, в прижатом к диску ротора состоянии, продолжают обе группы контактов в течение короткого времени t2, для обеспечения стабильного контакта КП. После этого первая группа отключается (отжимается) от движущегося подвижного контакта (диска), и возвращается на исходную позицию. Через интервал времени t3 по команде от синхронизатора 13 первая группа щеток прижимается к движущемуся непрерывному проводнику ротора и они движутся по его траектории совместно с ним, а через короткий интервал времени t4 вторая группа контактов отключается от движущегося подвижного контакта (диска), и возвращается на исходную позицию. Через интервал времени t5 вторая группа контактов прижимается к движущемуся подвижному контакту. В дальнейшем синхронизатор 13 повторяет циклы попеременного переключения щеток до прихода на синхронизатор 13 команды окончания работы. После чего он дает команду на общее отключение щеток от подвижных контактов ротора, тем самым размыкая электрические цепи между источником энергии 17 и нагрузкой 16. Основное требование для обеспечения качественного контакта это отключение одной группы щеток от движущегося проводника, только после того как к нему была подключена другая группа, то есть за все времени работы должно выполняться условие t1+t2>Т.
Приведенный пример показывает, что заявляемый способ по сравнению с известными, реализуя процесс «шагания» контактов, обеспечивает:
- существенное снижение требований к качеству изготовления контактных площадок контактов контактных пар и физическим и химическим свойствам материалов, из которых они изготавливаются;
- удлинение сроков эксплуатации контактных пар без ухудшения их характеристик;
- уменьшение мощности потерь между трущимися частями объекта;
- снижение температуры контакта в процессе эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контактное устройство для передачи электроэнергии между подвижными частями системы | 2021 |
|
RU2784659C1 |
| Способ контроля сопротивления контактных пар подвижных контактных устройств | 2021 |
|
RU2775376C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2023 |
|
RU2815378C1 |
| ЩЕТОЧНО-КОНТАКТНЫЙ АППАРАТ ГЕНЕРАТОРОВ БОЛЬШОЙ МОЩНОСТИ | 2023 |
|
RU2830664C1 |
| Карьерная транспортная установка | 2022 |
|
RU2785716C1 |
| КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2091884C1 |
| Щеточно-контактный аппарат для генераторов большой мощности | 2022 |
|
RU2791280C1 |
| Электромеханический трехфазный преобразователь частоты | 1987 |
|
SU1443106A1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2118036C1 |
| Селекторный ключ | 1932 |
|
SU34618A1 |


Способ передачи электроэнергии между подвижными частями объекта относится к электротехнике и энергетике, в частности к способам, которые обеспечивают непрерывную передачу энергии между отдельными блоками одного объекта, перемещающимися друг относительно друга. Электрический контакт между взаимно перемещающимися частями объекта создают в контактной паре, где процесс скольжения контактов друг по другу заменяют на процесс «шагания» одного контакта по-другому. Постоянный электрический контакт обеспечивается тем, что «шаги» контактов выполняют с перекрытием, обеспечивая во время «шага» прижатие контактов подвижной и неподвижной частей без взаимного скольжения. Способ позволяет исключить трение между движущимися контактами, что качественно меняет требования к производству и эксплуатации таких контактных пар. Технический эффект заключается в том, что существенно снижаются требования к механико-физическим свойствам материалов, из которых выполняются контакты контактных пар, повышается стабильность характеристик, уменьшается мощность потерь между трущимися частями объекта и удлиняется срок службы объекта. 4 ил.
Способ передачи электроэнергии между подвижными частями объекта, состоящий в том, что электроэнергию от неподвижной части объекта передают к подвижной путем создания контактной пары, обеспечивающей электрический контакт между двумя проводниками: первым, выполненным в виде токопроводящего кольца, который прикреплен к подвижной части объекта, и вторым, выполненным в виде набора щеток, который прикреплен к неподвижной части объекта, а контакт создают путем прижатия проводников друг к другу, отличающийся тем, что второй проводник выполняют в виде нескольких щеток, которые крепят к неподвижной части шарнирно, каждую на своей позиции по траектории движения частей объекта относительно друг друга, обеспечивая им возможность передвижения по траектории движения первого проводника, прикрепленного к подвижной части объекта, а постоянство контакта обеспечивают тем, что щетки делят на две группы и, в процессе движения частей объекта относительно друг друга, попеременно одну группу щеток прижимают к подвижному кольцу и в течение времени t1 эта группа движется с ним, создавая надежный электрический контакт, при этом вторую группу отключают от кольца и щетки этой группы, находятся каждая на своей исходной позиции, а потом щетки второй группы прижимают к кольцу, и они в течение времени t2 движутся вместе с ним по заданной траектории, а щетки первой отключают от кольца и возвращают на исходную позицию, причем отключение щеток каждой группы от кольца производят только после того, как подключают другую группу, а процесс переключения групп щеток повторяют циклически, до получения команды на выключение контактной пары, с периодом Т, причем обеспечивают требование, чтобы сумма интервалов времени t1 и t2 была больше периода Т.
| СПОСОБ ТОКОСЪЕМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309497C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗМЕРИТЕЛЬНОГО СИГНАЛА ЧЕРЕЗ ТОКОСЪЕМНИК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382454C1 |
| СПОСОБ КОНТРОЛЯ ТОКОРАСПРЕДЕЛЕНИЯ ПО КОМПЛЕКТАМ ЩЕТОК УЗЛА ТОКОСЪЕМА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2178609C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ С НЕПОДВИЖНОГО УЗЛА НА ВРАЩАЮЩУЮСЯ ЧАСТЬ | 2009 |
|
RU2382457C1 |
| Устройство для передачи электри-чЕСКОй эНЕРгии C НЕпОдВижНОй чАС-Ти HA ВРАщАющуюСя | 1979 |
|
SU813567A1 |
| Токосъемное устройство | 1980 |
|
SU936125A1 |
| Устройство для передачи электроэнергии с неподвижной части механизма на поворотную | 1982 |
|
SU1037367A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| US 20130244450 A1, 19.09.2013 | |||
| DE 3641706 A1, 16.06.1988. | |||

