Область техники, к которой относится изобретение
[01] Настоящее изобретение направлено на компоновку датчика и способ наблюдения за системой циркуляционного насоса.
Уровень техники
[01] Известно использование вибрационного датчика в узле насоса для обнаружения отказов (неисправностей) в работе. Например, EP 1 972 793 B1 описывает способ и узел насоса, использующие датчик вибрации для обнаружения отказов в работе, при этом влияние скорости вращения вращающегося вала ограничивается для анализа сигнала вибрации.
[02] Однако, в системе циркуляционного насоса с одним или более насосами сигнал вибрации, который интерпретируется как отказ (неисправность) насоса, может в действительности происходить снаружи насоса, перемещаясь внутрь насоса через трубопровод, соединенный с насосом. Отказ (неисправность) может, в действительности, быть в другом насосе, неисправном клапане или других источниках в или соединенных с трубопроводом.
[03] Таким образом, является желательным уменьшать риск неправильной интерпретации сигналов, возникающих снаружи насоса, как внутренних отказов работы насоса.
Сущность изобретения
[04] Варианты осуществления настоящего изобретения предоставляют решение этой проблемы, предоставляя компоновку датчика и способ наблюдения за системой циркуляционного насоса, и систему циркуляционного насоса, по меньшей мере, с одним насосом, имеющим такую компоновку датчика.
[05] В соответствии с первым аспектом настоящего изобретения, компоновка датчика для наблюдения за системой циркуляционного насоса, по меньшей мере, с одним насосом, при этом компоновка датчика содержит
- первый датчик вибрации, установленный в первой части насоса, по меньшей мере, для одного насоса,
- второй датчик вибрации, установленный во второй части насоса для упомянутого насоса, при этом первая часть насоса и вторая часть насоса имеют расстояние друг до друга, и
- модуль оценки,
при этом модуль оценки выполнен с возможностью установления различия, по меньшей мере, между двумя из k≥2 различных типов отказов на основе сравнения первых сигналов, принятых от первого датчика вибрации, и вторых сигналов, принятых от второго датчика вибрации.
[06] Например, в простом примере, модуль оценки может быть сконфигурирован, чтобы различать (выполнен с возможностью установления различия) между двумя типами отказов: внутренним отказом насоса и отказом, внешним по отношению к насосу. Сравнение между первыми сигналами и вторыми сигналами может, например, выявлять, что оба датчика обнаруживают очень похожую вибрацию, но второй датчик вибрации, например, расположенный ближе к впуску насоса по сравнению с первым датчиком вибрации, обнаруживает эту вибрацию раньше первого датчика вибрации, например, устанавливаемого дальше от впуска насоса по сравнению со вторым датчиком вибрации. В этом случае, модуль оценки может указывать отказ, внешний по отношению к насосу, наиболее вероятно где-то выше по потоку во впускном трубопроводе. Наоборот, внутренний отказ насоса может быть указан, когда первый датчик вибрации, например, устанавливаемый дальше от впуска насоса по сравнению со вторым датчиком вибрации, обнаруживает вибрацию ранее второго датчика вибрации, например, устанавливаемого ближе к впуску насоса по сравнению с первым датчиком вибрации. Первый датчик вибрации может быть установлен на головке насоса. Второй датчик вибрации может быть установлен рядом с впуском насоса или выпуском насоса. Кроме того, третий датчик вибрации может быть установлен рядом с другим из впуска насоса и выпуска насоса, соответственно, для того, чтобы иметь возможность различать между внешними отказами (неисправностями) на впускной стороне и внешними отказами на выпускной стороне.
[07] Важно отметить, что различие между типами отказов может не только быть основано на сравнении информации во время работы для первых сигналов и вторых сигналов. Сравнение первых сигналов и вторых сигналов, по существу, может увеличивать достоверность в различении между отказами насоса. Следовательно, компоновка датчика, описанная в данном документе, является не только полезной для снижения риска неправильной интерпретации сигналов, возникающих снаружи насоса, как внутренних отказов в работе насоса, но также для снижения риска неправильной интерпретации сигналов как одного типа внутреннего отказа, тогда как, в действительности, другой тип внутреннего отказа вызвал вибрацию. Например, вторые сигналы могут быть использованы, чтобы отклонять или подтверждать различие между типами отказов, которые были основаны на первых сигналах.
[08] Первые сигналы и/или вторые сигналы могут быть аналоговыми или цифровыми сигналами, сформированными первым датчиком вибрации и/или вторым датчиком вибрации при обнаружении вибраций конструкции насоса и/или текучей среды, которая должна быть перекачена. Первые сигналы и/или вторые сигналы могут, таким образом, представлять вибрации, обнаруживаемые посредством первого и/или второго датчика вибрации, соответственно. Первые сигналы и/или вторые сигналы могут быть сообщены оптическим образом через оптическое волокно, электрическим образом по проводу или беспроводным образом модулю оценки. Модуль оценки может быть реализован в электронной аппаратуре первого датчика вибрации и/или второго датчика вибрации или реализован отдельно от датчиков вибрации. Он может быть реализован как аппаратные средства и/или программное обеспечение в электронной аппаратуре насоса или модуле управления, внешним по отношению к насосу. Альтернативно, или в дополнение, модуль оценки может быть реализован в устройстве удаленного компьютера и/или облачной системе управления.
[09] Датчики вибрации могут включать в себя чувствительный к вибрации элемент (например, в форме элемента датчика ускорения, элемента оптического датчика, микрофона, гидрофона и/или элемента датчика давления). Датчик вибрации может обнаруживать вибрации механической конструкции насоса и/или вибрации перекачиваемой текучей среды в форме волн давления. Вибрации могут быть обусловленными конструкцией и/или обусловленными текучей средой звуковыми волнами, которые движутся через конструкцию насоса и/или текучую среду, которая должна перекачиваться. В перекачиваемой текучей среде волны вибрации могут быть продольными, тогда как они могут быть поперечными и/или продольными в механической конструкции насоса. Более предпочтительно, датчики вибрации могут быть сконфигурированы, чтобы обнаруживать продольные обусловленные конструкцией и/или обусловленные текучей средой волны вибрации. Что касается продольных волн вибрации, скорость v распространения может быть определена посредством уравнения Ньютона-Лапласа:
 ,
,
где K является модулем объемной упругости, а ρ - плотностью среды, через которую волны вибрации распространяются.
[10] Необязательно, различные типы отказов могут содержать, по меньшей мере, подмножество N из 1≤n≤k типов внутренних отказов, возникающих внутри насоса, подмножество N содержит, по меньшей мере, один тип отказа, выбранный из группы, состоящей из: отказа скорости, отказа давления, смещения от оси, неисправности подшипника, неисправности подшипника на ведущем хвостовике вала (DE), неисправности подшипника на неведущем хвостовике вала (NDE), неисправности крыльчатки, кавитации, сухого хода и гидравлического удара. Что-либо из отказа скорости, отклонения от оси, неисправности подшипника, неисправности подшипника ведущего хвостовика вала (DE), неисправности подшипника неведущего хвостовика вала (NDE), неисправности крыльчатки, кавитации и гидравлического удара может иметь особую характеристику вибрации, которая может быть проанализирована, чтобы различать между различными типами отказов. Сухой ход может быть обнаружен посредством элемента ультразвукового датчика, интегрированного в первый и/или второй датчик вибрации. Первый и второй датчик вибрации могут, таким образом, быть многофункциональным датчиком, имеющим множество интегрированных чувствительных элементов.
[11] Необязательно, различные типы отказов могут содержать, по меньшей мере, подмножество M из 1≤m≤k типов внешних отказов, возникающих снаружи насоса, подмножество M содержит, по меньшей мере, один тип отказа, выбранный из группы, состоящей из: внешнего отказа, внешнего отказа на впускной стороне и внешнего отказа на выпускной стороне.
[12] Необязательно, различные типы отказов могут содержать, по меньшей мере, подмножество N из 1≤n≤k типов внутренних отказов, возникающих внутри насоса, и подмножество M из 1≤m≤k типов внешних отказов, возникающих снаружи насоса.
[13] Необязательно, модуль оценки может быть сконфигурирован, чтобы различать, по меньшей мере, между двумя из k≥2 различных типов отказов на основе первых сигналов и подтверждать или отклонять такое различие на основе вторых сигналов. Они могут быть типами внутренних и/или внешних отказов.
[14] Необязательно, первый датчик вибрации может содержать элемент датчика вибрации и, по меньшей мере, один элемент датчика, выбранный из группы, состоящей из: элемента датчика давления, элемента акселерометра, элемента ультразвукового датчика и элемента оптического датчика.
[15] Необязательно, второй датчик вибрации может содержать элемент датчика вибрации и, по меньшей мере, один элемент датчика, выбранный из группы, состоящей из: элемента датчика давления, элемента акселерометра, элемента ультразвукового датчика, элемента оптического датчика.
[16] Необязательно, модуль оценки может быть сконфигурирован, чтобы различать между типами отказов на основе сравнения информации во время работы для первых сигналов и вторых сигналов. Например, различное время прихода волн вибрации в первом и втором датчике вибрации может указывать, является ли это внутренним или внешним отказом, соответственно.
[17] Необязательно, первый датчик вибрации может быть расположен на головке насоса, а второй датчик вибрации располагается на впускном или выпускном отверстии насоса. Необязательно, третий датчик вибрации может быть расположен на другом из впускного и выпускного отверстия. Это может обеспечивать различение между внешними отказами на впускной стороне и внешними отказами на выпускной стороне.
[18] Необязательно, модуль оценки может быть сконфигурирован для сравнения первого частотного спектра первых сигналов со вторым частотным спектром вторых сигналов. Прежде чем частотные спектры сравниваются посредством модуля оценки, фильтрация, например, фильтр Савицкого-Голая или локально взвешенное сглаживание диаграммы рассеяния (LOWESS), может быть применена к первому и второму сигналам, которые предпочтительно цифровым образом формируются посредством первого и второго датчиков вибрации. Фильтрация является предпочтительно линейной, т.е. фазовая характеристика фильтра является предпочтительно линейной функцией частоты. Быстрое преобразование Фурье (FFT) может быть применено к отфильтрованным первым и вторым сигналам, чтобы формировать первый и второй частотный спектр, соответственно.
[19] Необязательно, модуль оценки может быть сконфигурирован, чтобы определять степень когерентности между первыми сигналами и вторыми сигналами. Предпочтительно, первый и второй частотные спектры первых и вторых сигналов могут быть использованы в качестве входных данных для оценки величины квадрата коэффициента связи (MSC), при этом метод усредненной, модифицированной периодограммы Велча может быть применен, чтобы получать оценку спектральной плотности с уменьшенным шумом.
[20] Необязательно, модуль оценки может быть интегрирован в первый датчик вибрации и/или второй датчик вибрации.
[21] Необязательно, модуль оценки может быть внешним по отношению к первому датчику вибрации и второму датчику вибрации.
[22] Необязательно, компоновка датчика может дополнительно содержать модуль связи для беспроводной связи с компьютерным устройством и/или модулем оценки, являющимся внешним по отношению к первому датчику вибрации и второму датчику вибрации. Необязательно, модуль связи может быть интегрирован в первый датчик вибрации и/или второй датчик вибрации.
[23] В соответствии со вторым аспектом настоящего изобретения, предоставляется система циркуляционного насоса, содержащая
- по меньшей мере, один насос и
- компоновку датчика, которая описана выше.
[24] Необязательно, по меньшей мере, один насос может быть многоступенчатым центробежным насосом с набором ступеней крыльчатки, при этом первый датчик вибрации компоновки датчика устанавливается в первой части насоса, например, головке насоса, на стороне высокого давления для набора ступеней крыльчатки, а второй датчик вибрации компоновки датчика устанавливается во второй части насоса, например, элементе основания, содержащем впускное отверстие насоса и/или выпускное отверстие насоса, расположенной на расстоянии от первой части насоса. Первая часть насоса может быть головкой насоса.
[25] Необязательно, второй датчик вибрации компоновки датчика может быть установлен на впуске насоса, а третий датчик вибрации компоновки датчика может быть установлен на выпуске насоса.
[26] В соответствии с третьим аспектом настоящего изобретения предоставляется способ наблюдения за работой системы циркуляционного насоса, содержащий:
- прием первых сигналов от первого датчика вибрации, размещенного в первой части насоса для насоса системы циркуляционного насоса,
- прием вторых сигналов от второго датчика вибрации, размещенного во второй части насоса для упомянутого насоса системы циркуляционного насоса, при этом первая часть насоса и вторая часть насоса имеют расстояние друг до друга, и
- различение, по меньшей мере, между двумя из k≥2 различных типов отказов на основе сравнения первых сигналов и вторых сигналов.
[27] Необязательно, различные типы отказов могут содержать, по меньшей мере, подмножество N из 1≤n≤k типов отказов, возникающих внутри насоса, подмножество N содержит, по меньшей мере, один тип отказа, выбранный из группы, состоящей из: отказа скорости, отказа давления, смещения от оси, неисправности подшипника, неисправности подшипника на ведущем хвостовике вала (DE), неисправности подшипника на неведущем хвостовике вала (NDE), неисправности крыльчатки, кавитации, сухого хода и гидравлического удара.
[28] Необязательно, различные типы отказов могут содержать, по меньшей мере, подмножество M из 1≤m≤k типов отказов, возникающих снаружи насоса, подмножество M содержит, по меньшей мере, один тип отказа, выбранный из группы, состоящей из: внешнего отказа, внешнего отказа на впускной стороне и внешнего отказа на выпускной стороне.
[29] Необязательно, различные типы отказов могут содержать, по меньшей мере, подмножество N из 1≤n≤k типов отказов, возникающих внутри насоса, и подмножество M из 1≤m≤k типов отказов, возникающих снаружи насоса.
[30] Необязательно, этап различения может содержать
- различение, по меньшей мере, между двумя из k≥2 различных типов отказов на основе первых сигналов и
- подтверждение или отклонение такого различия на основе вторых сигналов.
[31] Необязательно, этап различения может быть основан на сравнении информации во время работы для первых сигналов и вторых сигналов.
[32] Необязательно, первый датчик вибрации может быть расположен на головке насоса, а второй датчик вибрации располагается на впускном или выпускном отверстии насоса.
[33] Необязательно, этап различения может содержать сравнение первого частотного спектра первых сигналов со вторым частотным спектром вторых сигналов.
[34] Необязательно, этап различения может содержать определение степени когерентности между первыми сигналами и вторыми сигналами.
[35] Необязательно, способ может дополнительно содержать этап беспроводной связи с компьютерным устройством и/или модулем оценки, являющимся внешним по отношению к первому датчику вибрации и второму датчику вибрации.
Краткое описание чертежей
[36] Варианты осуществления настоящего изобретения будут сейчас описаны посредством примера со ссылкой на следующие чертежи, на которых:
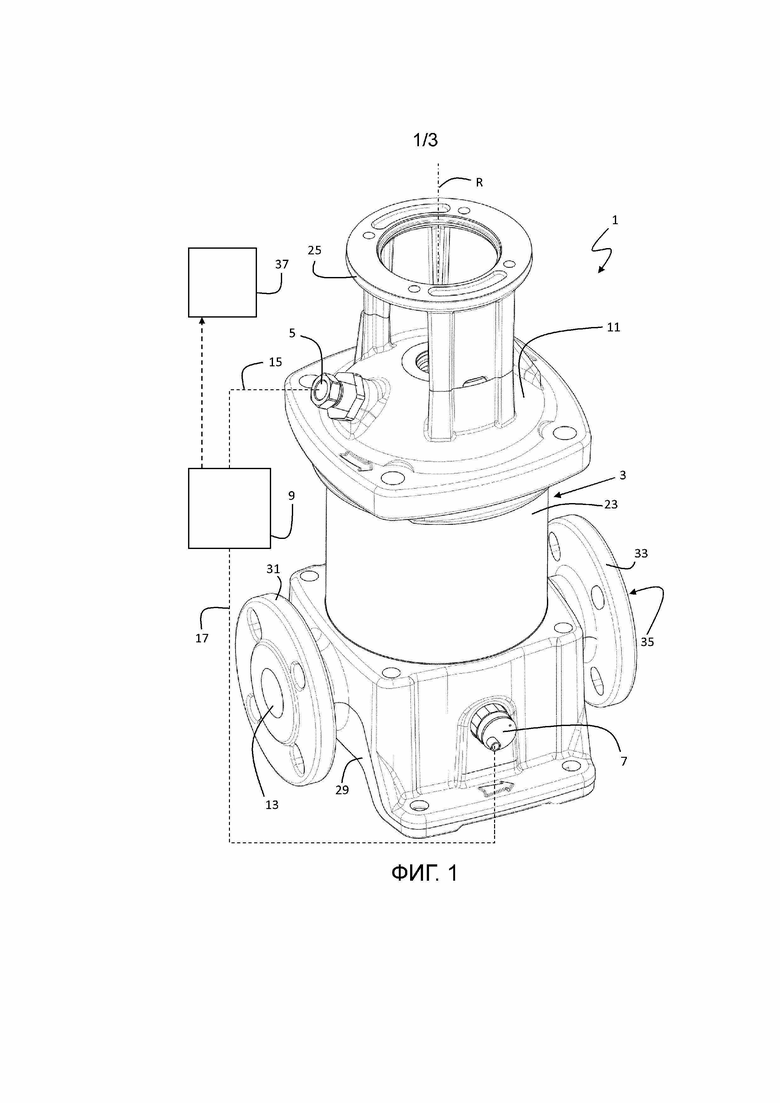
Фиг.1 показывает вид в перспективе примера многоступенчатого циркуляционного насоса, оснащаемого первым вариантом осуществления компоновки датчика согласно настоящему изобретению;
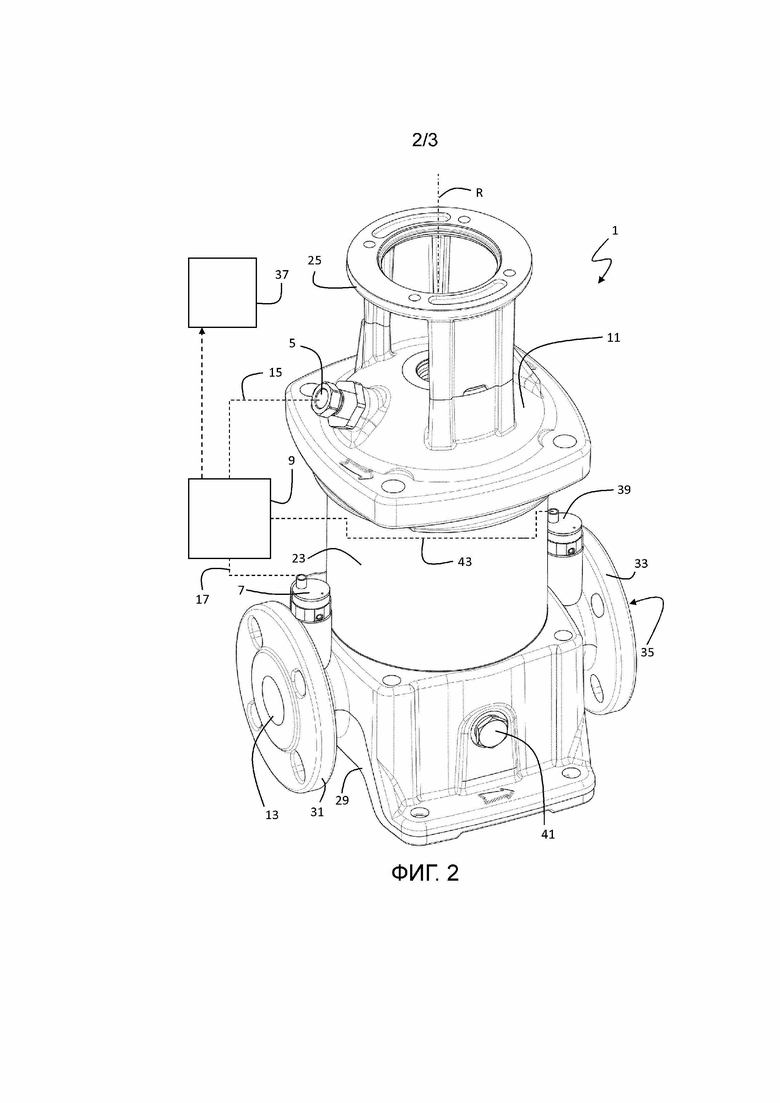
Фиг.2 показывает вид в перспективе примера многоступенчатого циркуляционного насоса, оснащаемого вторым вариантом осуществления компоновки датчика согласно настоящему изобретению;
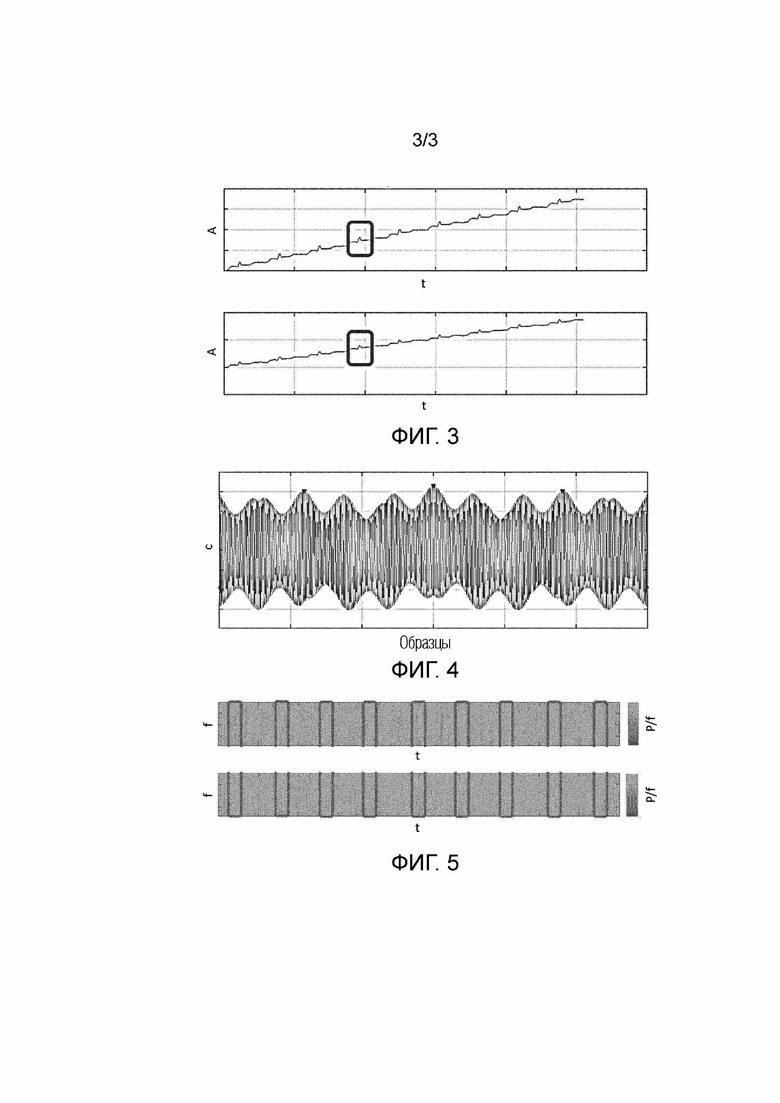
Фиг.3 показывает диаграммы нарастающей суммы фильтрованных амплитуд A вибрации в зависимости от времени t, обнаруживаемых посредством первого датчика вибрации и второго датчика вибрации компоновки датчика согласно настоящему изобретению;
Фиг.4 показывает диаграмму когерентности c между первыми сигналами датчика и вторыми сигналами во множестве выборок, обрабатываемых посредством модуля оценки компоновки датчика согласно настоящему изобретению; и
Фиг.5 показывает спектрограмму частот f вибрации в зависимости от времени t и спектральной плотности мощности для каждой частоты P/f, обнаруживаемой посредством первого датчика вибрации и второго датчика вибрации компоновки датчика согласно настоящему изобретению.
Подробное описание изобретения
[37] Фиг.1 показывает систему 1 циркуляционного насоса с многоступенчатым центробежным насосом 3, оснащаемым первым вариантом осуществления компоновки датчика, содержащей первый датчик 5 вибрации, второй датчик 7 вибрации и модуль 9 оценки. Первый датчик 5 вибрации устанавливается в первой части насоса, т.е. на головке 11 насоса. Второй датчик 7 вибрации устанавливается во второй части насоса, т.е. в элементе 29 основания, содержащем впускное отверстие 13 насоса, на расстоянии от головки 11 насоса. Модуль 9 оценки реализуется как аппаратные средства или программное обеспечение на компьютерном устройстве, внешним по отношению к насосу 3. Первая линия 15 связи между первым датчиком 5 вибрации и модулем 9 оценки может быть оптической, проводной или беспроводной, посредством которой модуль 9 оценки конфигурируется принимать первые сигналы от первого датчика 5 вибрации. Аналогично, вторая линия 17 связи между вторым датчиком 7 вибрации и модулем 9 оценки может быть оптической, проводной или беспроводной, посредством которой модуль 9 оценки конфигурируется принимать вторые сигналы от второго датчика 5 вибрации.
[38] Многоступенчатый центробежный насос 3, как показано на фиг.1, имеет вертикальную ось R ротора, по которой вал ротора протягивается для привода набора ступеней крыльчатки в корпусе 23 насоса. Опора 25 мотора устанавливается на головке 11 насоса, чтобы конструктивно поддерживать мотор (не показан) для приведения вала ротора. Вал ротора протягивается через сальник 27 вала в головке 11 насоса по направлению к мотору (не показан), поддерживаемому опорой 25 мотора. Корпус 23 насоса является практически цилиндрическим и окружает набор ступеней крыльчатки. Головка 11 насоса формирует верхний конец корпуса 23 насоса, а элемент 29 основания формирует нижний конец корпуса 23 насоса. Элемент 29 основания формирует впускной фланец 31 и выпускной фланец 33 для монтажа трубопровода (не показан). Элемент 29 основания дополнительно формирует первый жидкостный канал в качестве впуска 13 насоса и второй жидкостный канал в качестве выпуска 35 насоса. Расстояние между головкой 11 насоса с первым датчиком 5 и впуском 13 насоса со вторым датчиком 7, главным образом, зависит от числа ступеней крыльчатки. Чем больше ступеней крыльчатки насос 3 имеет, тем более длинным является корпус 23 насоса между элементом 29 основания и головкой 11 насоса. Следует отметить, что многоступенчатый центробежный насос 3 может альтернативно иметь горизонтальную конфигурацию, в которой ось R ротора протягивается горизонтально.
[39] Модуль 9 оценки принимает первые сигналы по первой линии 15 связи от первого датчика 5 вибрации и вторые сигналы по второй линии 17 связи от второго датчика 7 вибрации. Модуль 9 оценки конфигурируется, чтобы различать, по меньшей мере, между двумя из k≥2, где ( различных типов отказов на основе сравнения первых сигналов и вторых сигналов. В простом варианте осуществления эти два типа отказов могут быть "внутренним отказом насоса" и "отказом, внешним по отношению к насосу". Сравнение между первыми сигналами и вторыми сигналами может, например, выявлять, что оба датчика 5, 7 вибрации обнаруживают очень похожую вибрацию, но второй датчик 7 вибрации обнаруживает эту вибрацию раньше первого датчика 5 вибрации. В этом случае, модуль 9 оценки указывает отказ, внешний по отношению к насосу, наиболее вероятно где-то выше по потоку во впускном трубопроводе. Наоборот, внутренний отказ насоса может быть указан, когда первый датчик 5 вибрации обнаруживает вибрацию раньше второго датчика 7 вибрации. На основе различия между внешними и внутренними отказами модуль 9 оценки может инициировать рассылку информации и/или тревожное оповещение, например, визуальное, тактильное и/или звуковое, на стационарном или мобильном компьютерном устройстве 37 оператора.
различных типов отказов на основе сравнения первых сигналов и вторых сигналов. В простом варианте осуществления эти два типа отказов могут быть "внутренним отказом насоса" и "отказом, внешним по отношению к насосу". Сравнение между первыми сигналами и вторыми сигналами может, например, выявлять, что оба датчика 5, 7 вибрации обнаруживают очень похожую вибрацию, но второй датчик 7 вибрации обнаруживает эту вибрацию раньше первого датчика 5 вибрации. В этом случае, модуль 9 оценки указывает отказ, внешний по отношению к насосу, наиболее вероятно где-то выше по потоку во впускном трубопроводе. Наоборот, внутренний отказ насоса может быть указан, когда первый датчик 5 вибрации обнаруживает вибрацию раньше второго датчика 7 вибрации. На основе различия между внешними и внутренними отказами модуль 9 оценки может инициировать рассылку информации и/или тревожное оповещение, например, визуальное, тактильное и/или звуковое, на стационарном или мобильном компьютерном устройстве 37 оператора.
[40] Первый датчик 5 вибрации и второй датчик 7 вибрации являются предпочтительно многофункциональными датчиками, включающими в себя не только чувствительный к вибрации элемент (например, в форме элемента датчика ускорения, элемента оптического датчика, микрофона, гидрофона и/или элемента датчика давления), но также другие интегрированные чувствительные элементы. Таким образом, прием первых сигналов предоставляет возможность модулю 9 оценки различать между подмножеством N из 1≤n≤k типов внутренних отказов, возникающих внутри насоса 3, например, отказ (нарушение) скорости, отказ (нарушение) давления, отклонение от оси, неисправность подшипника, неисправность подшипника ведущего хвостовика (DE) вала, неисправность подшипника неведущего хвостовика вала (NDE), неисправность крыльчатки, кавитация, сухой ход и гидравлический удар. Высокая температура, указывающая отказ по температуре, может быть обнаружена посредством дополнительного чувствительного к температуре элемента, интегрированного в первый датчик 5 вибрации. Что-либо из отказа скорости, отклонения от оси, неисправности подшипника, неисправности подшипника ведущего хвостовика вала (DE), неисправности подшипника неведущего хвостовика вала (NDE), неисправности крыльчатки, кавитации и гидравлического удара может иметь особую характеристику вибрации, которая может быть проанализирована посредством модуля 9 оценки, чтобы различать между различными типами внутренних отказов. Сухой ход может быть обнаружен посредством элемента ультразвукового датчика, интегрированного в первый датчик 5 вибрации.
[41] Вторые сигналы от второго датчика 7 вибрации используются модулем оценки, чтобы подтверждать или отклонять различие между типами внутренних отказов, которые модуль 9 оценки основывал только на первых сигналах. На основе подтвержденного различия между типами внутренних отказов модуль 9 оценки может инициировать рассылку информации и/или тревожное оповещение, например, визуальное, тактильное и/или звуковое, на стационарном или мобильном компьютерном устройстве 37 оператора. Таким образом, достоверность в различии может быть увеличена, и некорректные тревожные оповещения предотвращаются посредством сравнения первых сигналов и вторых сигналов.
[42] Фиг.2 показывает систему 1 циркуляционного насоса с многоступенчатым центробежным насосом 3, оснащаемым вторым вариантом осуществления компоновки датчика, содержащей первый датчик 5 вибрации, второй датчик 7 вибрации, третий датчик 39 вибрации и модуль 9 оценки. Центральное отверстие в элементе 29 основания, в котором второй датчик 7 был расположен в первом варианте осуществления, показанном на фиг.1, теперь закрыто пробкой 41 во втором варианте осуществления, показанном на фиг.2. Второй датчик 7 теперь располагается на стороне элемента 29 основания, где находится впуск 13 насоса. Третий датчик 39 аналогично располагается на другой стороне элемента 29 основания, где находится выпуск 35 насоса. Модуль 9 оценки принимает первые сигналы по первой линии 15 связи от первого датчика 5 вибрации, вторые сигналы по второй линии 17 связи от второго датчика 7 вибрации и третьи сигналы по третьей линии 43 связи от третьего датчика 39 вибрации. Временная задержка между третьими сигналами и вторыми сигналами может быть проанализирована посредством модуля 9 оценки, чтобы различать между внешними отказами на впускной стороне и внешними отказами на выпускной стороне.
[43] Фиг.3 показывает нарастающую сумму фильтрованных амплитуд A вибрации в зависимости от времени t, обнаруженных посредством первого датчика 5 вибрации (верхняя диаграмма) и второго датчика 7 вибрации (нижняя диаграмма). Вибрация является монотонным постукиванием в трубопроводе (не показан на фиг.1 и 2), соединенном с впускным фланцем 31. Вибрация, таким образом, вызывается внешним отказом, возникающим снаружи насоса 3. Первые сигналы (верхняя диаграмма) и вторые сигналы (нижняя диаграмма) выглядят похожими по форме и частоте, указывая высокую степень когерентности между первыми и вторыми сигналами. Модуль 9 оценки определяет степень когерентности между первыми сигналами и вторыми сигналами посредством вычисления функции корреляции, как показано на фиг.4. Расстояние между первым датчиком 5 вибрации на головке 11 насоса и вторым датчиком 7 вибрации в элементе 29 основания означает, что частота первых сигналов слегка ниже частоты вторых сигналов, поскольку вибрации, достигающие второго датчика 7 вибрации, должны дополнительно перемещаться вверх по корпусу 23 насоса, чтобы достигать первого датчика 5 вибрации. Это различие в частоте может быть определено посредством графика автоковариации, показанного на фиг.4, и/или спектрограммы, которая показана на фиг.5. График автоковариации, показанный на фиг.4, может быть использован для получения лучших временных последовательностей вибрации для определения временной задержки между сигналами. Например, наибольшее абсолютное значение нормализованной взаимной корреляции c может указывать лучший выбор для непериодических сигналов. В случае периодических сигналов кратчайшая временная задержка может быть выбрана между несколькими максимумами в нормализованной взаимной корреляции c. Спектрограмма, как показано на фиг.5, является полезной для перекрестной проверки временных последовательностей, совпадающих в нескольких частотных диапазонах параллельно. Частотное отклонение представляет временную задержку, вызванную расстоянием между датчиками 5, 7. Поскольку скорость звука для продольных звуковых волн в материале, например, нержавеющей стали, корпуса 23 насоса, и расстояние между датчиками 5, 7 являются известными, ожидаемое отклонение частоты является известным и может быть сравнено с определенным отклонением частоты. С частотой выборки 44,1 кГц, например, минимальное различимое расстояние будет приблизительно 10 см±50% в зависимости от материала корпуса насоса. Если определенное отклонение частоты совпадает с ожидаемым отклонением частоты в некотором доверительном интервале, модуль 9 оценки идентифицирует вибрацию как внешний тип отказа. Модуль 9 оценки дополнительно выполняет спектральный анализ спектрограммы, как показано на фиг.5, чтобы идентифицировать внешний тип отказа как гидравлический удар.
[44] В случае внутреннего отказа, возникающего из насоса 3, например, отклонение от оси, неисправность подшипника, неисправность подшипника ведущего хвостовика вала (DE), неисправность подшипника неведущего хвостовика вала (NDE), неисправность крыльчатки или кавитация, первый датчик 5 вибрации на головке 11 насоса, как ожидается, должен обнаруживать характерные вибрации раньше второго датчика 7 вибрации на впуске 13 насоса. Направление евклидового вектора, т.е., знак, определенной временной задержки может, таким образом, быть использован для различения между внутренним отказом и внешним отказом. Модуль 9 оценки анализирует первые сигналы и идентифицирует один из подмножества N из n типов внутренних отказов, возникающих внутри насоса, где 1≤n≤k, и ( . Сравнение со вторыми сигналами затем используется, чтобы подтверждать или отклонять такую идентификацию для того, чтобы увеличивать конфиденциальность в идентификации внутреннего типа отказа на основе первых сигналов.
. Сравнение со вторыми сигналами затем используется, чтобы подтверждать или отклонять такую идентификацию для того, чтобы увеличивать конфиденциальность в идентификации внутреннего типа отказа на основе первых сигналов.
[45] Когда, в вышеприведенном описании, упоминаются целые части или элементы, которые имеют известные, очевидные или предвидимые эквиваленты, тогда такие эквиваленты включаются в данный документ, как если бы изложенные индивидуально. Ссылка должна быть сделана на формулу изобретения для определения истинных рамок настоящего изобретения, которые должны истолковываться так, чтобы охватывать любые такие эквиваленты. Читателем будет также оценено, что целые части или отличительные признаки описания изобретения, которые описываются как необязательные, предпочтительные, преимущественные, традиционные или т.п., являются необязательными и не ограничивают рамки независимых пунктов формулы изобретения.
[46] Вышеупомянутые варианты осуществления должны пониматься как иллюстративные примеры изобретения. Должно быть понятно, что любой признак, описанный по отношению к какому-либо одному варианту осуществления, может быть использован один или в комбинации с другими описанными признаками, и может также быть использован в комбинации с одним или более признаками любого другого из вариантов осуществления, или любой комбинации каких-либо других из вариантов осуществления. В то время как, по меньшей мере, один примерный вариант осуществления был показан и описан, следует понимать, что другие модификации, замены и альтернативы являются очевидными обычному специалисту в области техники и могут быть изменены без отступления от рамок предмета изучения, описанного в данном документе, и эта заявка предназначается, чтобы охватывать любые адаптации или разновидности конкретных вариантов осуществления, обсужденных в данном документе.
[47] Кроме того, термин «содержащий» не исключает другие элементы или этапы, а «a» или «один» не исключают множественное число. Кроме того, характеристики или этапы, которые были описаны со ссылкой на один из вышеописанных примерных вариантов осуществления, могут также быть использованы в сочетании с другими характеристиками или этапами других примерных вариантов осуществления, описанных выше. Этапы способа могут быть применены в любом порядке или параллельно или могут составлять часть или более подробную версию другого этапа способа. Следует понимать, что необходимо осуществлять в рамках патента, основанных на этом документе, все такие модификации как обоснованно и правильно происходящие в рамках усовершенствования существующего уровня техники. Такие модификации, замены и альтернативы могут быть выполнены без отступления от духа и рамок изобретения, которые должны быть определены из прилагаемой формулы изобретения и ее законных эквивалентов.
[48] Список ссылочных номеров:
1 система насоса
3 многоступенчатый центробежный насос
5 первый датчик
7 второй датчик
9 модуль оценки
11 головка насоса
13 впуск насоса
15 первая линия связи
17 вторая линия связи
23 корпус насоса
25 опора мотора
27 сальник вала
29 элемент основания
31 впускной фланец
33 выпускной фланец
35 выпуск насоса
37 компьютерное устройство
39 третий датчик
41 пробка
43 третья линия связи
R ось ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для информирования о характеристиках работы газовой турбины в реальном времени | 2013 |
|
RU2627742C2 |
| УСТРОЙСТВО ДЛЯ УПЛОТНИТЕЛЬНОЙ СИСТЕМЫ | 2007 |
|
RU2439377C2 |
| Способ и система для правил диагностики мощных газовых турбин | 2013 |
|
RU2613637C2 |
| НЕЗАВИСИМАЯ ОТ ДАТЧИКА ИДЕНТИФИКАЦИЯ НЕИСПРАВНОСТИ МЕХАНИЧЕСКОГО СТАНКА | 2020 |
|
RU2795745C1 |
| СИСТЕМА АВТОПИЛОТА, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2652685C2 |
| УЗЕЛ ДАТЧИКА И СПОСОБ ОБНАРУЖЕНИЯ ПОВРЕЖДЕНИЙ В НАСОСАХ И УЗЕЛ НАСОСА, СОДЕРЖАЩИЙ ТАКОЙ УЗЕЛ ДАТЧИКА | 2017 |
|
RU2726968C1 |
| НАСОСНЫЙ УЗЕЛ | 2018 |
|
RU2692889C1 |
| КЕПСТРАЛЬНЫЙ АНАЛИЗ ИСПРАВНОСТИ НЕФТЕПРОМЫСЛОВОГО НАСОСНОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2718999C2 |
| СИСТЕМА ДВИГАТЕЛЯ И СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2014 |
|
RU2665791C2 |
| ДОЗИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ НАПИТКОВ С СИСТЕМОЙ ГАЗИРОВАНИЯ | 2013 |
|
RU2629868C2 |
Изобретение относится к машиностроению, а именно к компоновке датчика и способу наблюдения за системой циркуляционного насоса. Компоновка датчика для наблюдения за системой (1) циркуляционного насоса, по меньшей мере, с одним насосом (3) содержит первый датчик (5) вибрации, выполненный с возможностью установки в первой части (11) насоса, второй датчик (7) вибрации, выполненный с возможностью установки во второй части (29) насоса. Первая часть (11) насоса и вторая часть (29) насоса имеют расстояние друг до друга. Модуль (9) оценки выполнен с возможностью установления различия, по меньшей мере, между двумя из k≥2 различных типов неисправностей на основе сравнения сигналов от первого датчика (5) вибрации и вторых сигналов от второго датчика (7) вибрации, и выполнен с возможностью установления различия между типами неисправностей на основе сравнения информации во время работы первых сигналов и вторых сигналов. Также раскрыты система циркуляционного насоса и способ наблюдения за работой системы. Технический результат заключается в снижении риска неправильной интерпретации сигналов. 3 н. и 21 з.п. ф-лы, 5 ил.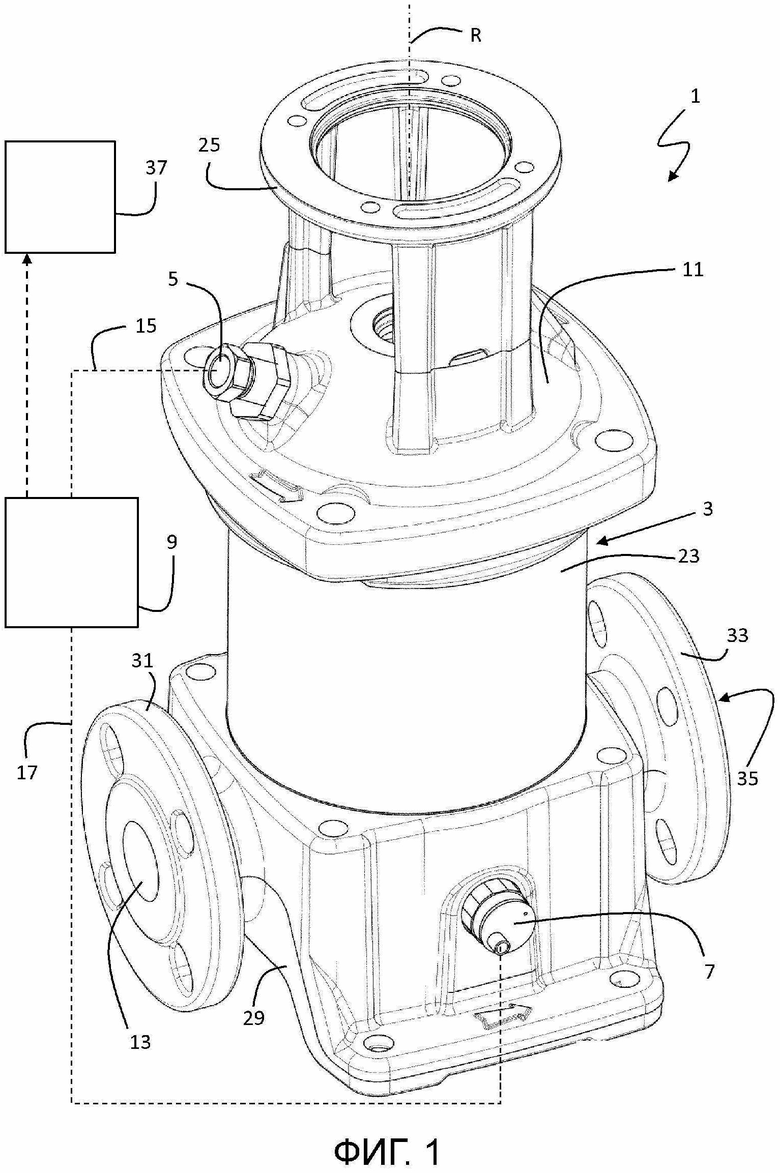
1. Компоновка датчика для наблюдения за системой (1) циркуляционного насоса, по меньшей мере, с одним насосом (3), при этом компоновка датчика содержит:
- первый датчик (5) вибрации, выполненный с возможностью установки в первой части (11) насоса одного из, по меньшей мере, одного насоса (3),
- второй датчик (7) вибрации, выполненный с возможностью установки во второй части (29) насоса для упомянутого насоса (3), при этом первая часть (11) насоса и вторая часть (29) насоса имеют расстояние друг до друга, и
- модуль (9) оценки,
при этом модуль (9) оценки выполнен с возможностью установления различия, по меньшей мере, между двумя из k≥2 различных типов неисправностей на основе сравнения первых сигналов, принятых от первого датчика (5) вибрации, и вторых сигналов, принятых от второго датчика (7) вибрации,
отличающаяся тем, что модуль (9) оценки выполнен с возможностью установления различия между типами неисправностей на основе сравнения информации во время работы первых сигналов и вторых сигналов.
2. Компоновка датчика по п.1, в которой различные типы неисправностей включают в себя, по меньшей мере, подмножество N из 1≤n≤k типов внутренних неисправностей, возникающих внутри насоса (3), подмножество N, включающее в себя, по меньшей мере, один тип неисправности, выбранной из группы, состоящей из: нарушения скорости, нарушения давления, отклонения от оси, неисправности подшипника, неисправности подшипника ведущего хвостовика вала (DE), неисправности подшипника неведущего хвостовика вала (NDE), неисправности крыльчатки, кавитации, сухого хода и гидравлического удара.
3. Компоновка датчика по п.1 или 2, в которой различные типы неисправностей включают в себя, по меньшей мере, подмножество M из 1≤m≤k типов внешних неисправностей, возникающих снаружи насоса (3), подмножество M, включающее в себя, по меньшей мере, один тип неисправности, выбранной из группы, состоящей из: внешней неисправности, внешней неисправности на впускной стороне и внешней неисправности на выпускной стороне.
4. Компоновка датчика по любому из предшествующих пунктов, в которой различные типы неисправностей включают в себя, по меньшей мере, подмножество N из 1≤n<k типов внутренних неисправностей, возникающих внутри насоса (3), и подмножество M из 1≤m≤k внешних неисправностей, возникающих снаружи насоса (3).
5. Компоновка датчика по любому из предшествующих пунктов, в которой модуль (9) оценки выполнен с возможностью установления различия, по меньшей мере, между двумя из k≥2 различных типов неисправностей на основе первых сигналов и подтверждать или отклонять такое различие на основе вторых сигналов.
6. Компоновка датчика по любому из предшествующих пунктов, в которой первый датчик (5) вибрации содержит элемент датчика вибрации и, по меньшей мере, один элемент датчика, выбранный из группы, состоящей из: элемента датчика давления, элемента акселерометра, элемента ультразвукового датчика, элемента оптического датчика.
7. Компоновка датчика по любому из предшествующих пунктов, в которой второй датчик (7) вибрации содержит элемент датчика вибрации и, по меньшей мере, один элемент датчика, выбранный из группы, состоящей из: элемента датчика давления, элемента акселерометра, элемента ультразвукового датчика, элемента оптического датчика.
8. Компоновка датчика по любому из предшествующих пунктов, в которой первый датчик (5) вибрации располагается на головке (11) насоса (3), а второй датчик (7) вибрации располагается на впуске (13) или выпуске (35) насоса (3).
9. Компоновка датчика по любому из предшествующих пунктов, при этом модуль (9) оценки выполнен с возможностью сравнения первого частотного спектра первых сигналов со вторым частотным спектром вторых сигналов.
10. Компоновка датчика по любому из предшествующих пунктов, в которой модуль (9) оценки выполнен с возможностью определения степени когерентности между первыми сигналами и вторыми сигналами.
11. Компоновка датчика по любому из предшествующих пунктов, в которой модуль (9) оценки интегрируется в первый датчик (5) вибрации или второй датчик (7) вибрации.
12. Компоновка датчика по любому из пп.1-11, в которой модуль (9) оценки является внешним по отношению к первому датчику (5) вибрации и второму датчику (7) вибрации.
13. Компоновка датчика по любому из предшествующих пунктов, дополнительно содержащая модуль связи для беспроводной связи с компьютерным устройством (37) и/или с модулем (9) оценки, являющимся внешним по отношению к первому датчику (5) вибрации и второму датчику (7) вибрации.
14. Система (1) циркуляционного насоса, содержащая
- по меньшей мере, один насос (3) и
- компоновку датчика по любому из предшествующих пунктов.
15. Система (1) циркуляционного насоса по п.14, при этом, по меньшей мере, один насос (3) является многоступенчатым центробежным насосом (3) с набором ступеней крыльчатки, при этом первый датчик (5) вибрации компоновки датчика устанавливается в первой части (11) насоса на стороне высокого давления набора ступеней крыльчатки, а второй датчик (7) вибрации компоновки датчика устанавливается во второй части (29) насоса на впуске (13) насоса и/или выпуске (35) насоса на расстоянии от первой части (11) насоса.
16. Система циркуляционного насоса по п.14 или 15, в которой второй датчик (7) вибрации компоновки датчика устанавливается на впуске (13) насоса, а третий датчик вибрации компоновки датчика устанавливается на выпуске (35) насоса.
17. Способ наблюдения за работой системы циркуляционного насоса, включающий в себя этапы, на которых:
- принимают первые сигналы от первого датчика вибрации, размещенного в первой насосной части насоса системы циркуляционного насоса,
- принимают вторые сигналы от второго датчика вибрации, размещенного во второй насосной части упомянутого насоса системы циркуляционного насоса, при этом первая насосная часть и вторая насосная часть имеют расстояние друг до друга, и
- устанавливают различия на основе сравнения информации во время работы первых сигналов и вторых сигналов, по меньшей мере, между двумя из k≥2 различных типов неисправностей на основе сравнения первых сигналов и вторых сигналов,
отличающийся тем, что различные типы неисправностей включают в себя, по меньшей мере, подмножество M из 1≤m≤k типов внешних неисправностей, возникающих снаружи насоса, подмножество M включает в себя, по меньшей мере, один тип неисправности, выбранной из группы, состоящей из: внешней неисправности, внешней неисправности на впускной стороне и внешней неисправности на выпускной стороне.
18. Способ по п.17, в котором различные типы неисправностей включают в себя, по меньшей мере, подмножество N из 1≤n≤k типов внутренних неисправностей, возникающих внутри насоса, подмножество N включает в себя, по меньшей мере, один тип неисправности, выбранной из группы, состоящей из: нарушения скорости, нарушения давления, отклонения от оси, неисправности подшипника, неисправности подшипника ведущего хвостовика вала (DE), неисправности подшипника неведущего хвостовика вала (NDE), неисправности крыльчатки, кавитации, сухого хода и гидравлического удара.
19. Способ по любому из пп.17, 18, в котором различные типы неисправностей включают в себя, по меньшей мере, подмножество N из 1≤n<k типов внутренних неисправностей, возникающих внутри насоса, и подмножество M из 1≤m≤k внешних неисправностей, возникающих снаружи насоса.
20. Способ по любому из пп.17-19, в котором этап установления различия содержит этапы, на которых
- устанавливают различия, по меньшей мере, между двумя из k≥2 различных типов неисправностей на основе первых сигналов и
- подтверждают или отвергают такое различие на основе вторых сигналов.
21. Способ по любому из пп.17-20, в котором первый датчик вибрации располагается на головке насоса, а второй датчик вибрации располагается на впускном или выпускном отверстии насоса.
22. Способ по любому из пп.17-21, в котором этап установления различия содержит этап, на котором сравнивают первый частотный спектр первых сигналов со вторым частотным спектром вторых сигналов.
23. Способ по любому из пп.17-22, в котором этап установления различия содержит этап, на котором определяют степень когерентности между первыми сигналами и вторыми сигналами.
24. Способ по любому из пп.17-23, дополнительно содержащий этап, на котором беспроводным образом связываются с компьютерным устройством и/или модулем оценки, являющимся внешним по отношению к первому датчику вибрации и второму датчику вибрации.
| US 2007071057 A1, 29.03.2007 | |||
| WO 2018122016 A1, 05.07.2018 | |||
| US 5209116 A, 11.05.1993 | |||
| Комнатная печь | 1923 |
|
SU666A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРИЧЕСКОЙ ЦЕНТРОБЕЖНОЙ НАСОСНОЙ УСТАНОВКИ | 1998 |
|
RU2139451C1 |

