РОДСТВЕННЫЕ ЗАЯВКИ
Настоящим выполнена ссылка на предварительную заявку на патент США № 62/895,247, озаглавленную «СИСТЕМЫ И СПОСОБЫ МНОГОДАТИЧКОВОГО СООТВЕТСТВИЯ ДЛЯ АВТОМАТИЗИРОВАННОЙ МАШИННОЙ ДИАГНОСТИКИ» от 3 сентября 2019 г., раскрытие которой настоящим включено посредством ссылки, и приоритет которой настоящим заявлен в соответствии с 37 CFR 1.78(a)(4) и (5)(i).
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к отслеживанию механических станков и, в частности, к идентификации неисправностей механических станков посредством их отслеживания.
УРОВЕНЬ ТЕХНИКИ
В данной области техники известны различные системы и способы идентификации неисправностей механических станков.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на предложение новых систем и способов использования переноса обучения между датчиками различных типов, отслеживающих сигналы, исходящие от механических станков, с целью идентификации неисправностей и технического обслуживания отслеживаемых механических станков.
Таким образом, в соответствии с предпочтительным вариантом осуществления настоящего изобретения предложен способ идентификации неисправности по меньшей мере одного механического станка, включающий обеспечение получения первым множеством датчиков, соединенных с соответствующим первым множеством механических станков, первого множества наборов сигналов, исходящих от первого множества механических станков, причем первое множество механических станков имеет по меньшей мере одну общую характеристику, подачу по меньшей мере первого множества наборов сигналов первого множества механических станков на существующий классификатор неисправностей, предварительно обученный с возможностью автоматической идентификации неисправностей второго множества механических станков на основе сигналов, исходящих от них и предварительно полученных вторым множеством датчиков, причем второе множество датчиков относится к другому типу, чем первое множество датчиков, второе множество механических станков имеет указанную по меньшей мере одну общую характеристику, модификацию указанного существующего классификатора неисправностей посредством использования переноса обучения на основе по меньшей мере первого множества наборов сигналов первого множества механических станков, тем самым обеспечивая модифицированный классификатор неисправностей, применение модифицированного классификатора неисправностей по меньшей мере к одному дополнительному набору сигналов, получаемых по меньшей мере одним датчиком из первого множества датчиков и исходящих по меньшей мере от одного заданного механического станка, имеющего указанную по меньшей мере одну общую характеристику, причем модифицированный классификатор неисправностей выполнен с возможностью автоматической идентификации по меньшей мере одной неисправности по меньшей мере одного заданного механического станка на основе указанного по меньшей мере одного дополнительного набора сигналов, и предоставления воспринимаемых человеком выходных данных с помощью устройства вывода, содержащих по меньшей мере идентификацию неисправности указанного по меньшей мере одного заданного механического станка, по меньшей мере одной операции по ремонту или техническому обслуживанию, выполняемой на основе воспринимаемых человеком выходных данных.
В соответствии с одним предпочтительным вариантом осуществления настоящего изобретения способ также включает следующие этапы: обеспечение получения первым множеством датчиков первого множества наборов сигналов и перед подачей первого множества наборов сигналов на существующий классификатор неисправностей: получение первого множества наборов данных о рабочем состоянии для механических станков из первого множества механических станков, причем каждый набор данных о рабочем состоянии указывает на рабочее состояние механического станка из первого множества механических станков, каждое рабочее состояние связано по меньшей мере с одним из указанных наборов сигналов, указанная подача по меньшей мере первого множества наборов сигналов на существующий классификатор неисправностей также включает подачу указанных данных о рабочем состоянии первого множества механических станков на существующий классификатор неисправностей, указанная модификация существующего классификатора неисправностей посредством применения переноса обучения на основе по меньшей мере первого множества наборов сигналов также включает модификацию существующего классификатора неисправностей посредством применения переноса обучения дополнительно на основе первого множества наборов данных о рабочем состоянии первого множества механических станков.
Предпочтительно, идентификация неисправности включает идентификацию конкретной неисправности указанного по меньшей мере одного заданного механического станка и прогнозирование отказа указанного по меньшей мере одного заданного механического станка вследствие указанной конкретной неисправности при отсутствии выполнения рекомендованной операции по его техническому обслуживанию, такой что указанный по меньшей мере один заданный механический станок действительно выйдет из строя при отсутствии выполнения рекомендованной операции по техническому обслуживанию.
Предпочтительно, существующий классификатор неисправностей содержит нейронную сеть, а модификация существующего классификатора неисправностей включает добавление в нейронную сеть по меньшей мере одного слоя соответствия, причем помимо добавления указанного по меньшей мере одного слоя соответствия, нейронная сеть в остальном является немодифицированной посредством указанной модификации.
Предпочтительно, нейронная сеть, содержащая существующий классификатор неисправностей, содержит слой данных и входной слой для приема данных от слоя данных, причем указанный по меньшей мере один слой соответствия добавляют между слоем данных и входным слоем, а указанный по меньшей мере один слой соответствия выполнен с возможностью приема данных от слоя данных в модифицированном классификаторе неисправностей.
Предпочтительно, первое множество датчиков имеет первое распределение частотной характеристики, а второе множество датчиков имеет второе распределение частотной характеристики, причем слой соответствия выполнен с возможностью осуществления соответствия между первым и вторым распределениями частотной характеристики.
В соответствии с одним предпочтительным вариантом осуществления способа согласно настоящему изобретению первое множество датчиков выполнено с возможностью восприятия одинакового типа сигнала, что и второе множество датчиков.
Предпочтительно, указанный одинаковый тип сигнала содержит один из сигнала вибрации, сигнала магнитного потока, сигнала тока, температуры и внутреннего давления станка.
В соответствии с другим предпочтительным вариантом осуществления настоящего изобретения первое множество датчиков и второе множество датчиков выполнены с возможностью восприятия взаимно различных типов сигналов.
Предпочтительно, взаимно различные типы сигналов содержат по меньшей мере один из следующих сигналов: сигналы вибрации и магнитного потока, сигналы вибрации и электрического тока, сигналы вибрации и температуры, сигналы электрического тока и магнитного потока и сигналы вибрации и внутреннего давления станка.
Предпочтительно, по меньшей мере некоторые из рабочих состояний механического станка из первого множества механических станков, как указано посредством первого множества наборов данных о рабочем состоянии, представляют собой неисправные рабочие состояния.
В соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения первое множество наборов сигналов и первое множество наборов данных о рабочем состоянии первого множества механических станков содержат менее 30 неисправных рабочих состояний.
В соответствии с другим предпочтительным вариантом осуществления настоящего изобретения дополнительно предложена система для идентификации неисправностей по меньшей мере одного механического станка, содержащая первое множество датчиков, соединенных с соответствующим первым множеством механических станков и выполненных с возможностью получения первого множества наборов сигналов, исходящих от первого множества механических станков, причем первое множество механических станков имеет по меньшей мере одну общую характеристику, блок обработки данных, выполненный с возможностью: приема первого множества наборов сигналов первого множества механических станков, причем блок обработки данных содержит существующий классификатор неисправностей, предварительно обученный с возможностью автоматической классификации рабочих состояний второго множества механических станков на основе сигналов, исходящих от них и предварительно полученных вторым множеством датчиков, причем второе множество датчиков относится к различному типу, чем первое множество датчиков, второе множество механических станков имеет указанную по меньшей мере одну общую характеристику, модификации указанного существующего классификатора неисправностей посредством использования переноса обучения на основе по меньшей мере первого множества наборов сигналов первого множества механических станков, тем самым обеспечивая модифицированный классификатор неисправностей, и применения модифицированного классификатора неисправностей по меньшей мере к одному дополнительному набору сигналов, получаемых по меньшей мере одним датчиком из первого множества датчиков и исходящих по меньшей мере от одного заданного механического станка, имеющего указанную по меньшей мере одну общую характеристику, причем модифицированный классификатор неисправностей выполнен с возможностью автоматической идентификации по меньшей мере одной неисправности указанного по меньшей мере одного заданного механического станка на основе указанного по меньшей мере одного дополнительного набора сигналов, и устройство вывода, находящееся в связи с блоком обработки данных и выполненное с возможностью предоставления воспринимаемых человеком выходных данных, содержащих по меньшей мере идентификацию неисправности указанного по меньшей мере одного заданного механического станка, по меньшей мере одной операции по ремонту или техническому обслуживанию, выполняемой на основе воспринимаемых человеком выходных данных.
В соответствии с одним предпочтительным вариантом осуществления настоящего изобретения система также содержит блок сбора данных, выполненный с возможностью получения первого множества наборов данных о рабочем состоянии для механических станков из первого множества механических станков, причем каждый набор данных о рабочем состоянии указывает на рабочее состояние механического станка из первого множества механических станков, каждое рабочее состояние связано по меньшей мере с одним из указанных наборов сигналов, а блок обработки данных выполнен с возможностью приема данных о рабочем состоянии первого множества механических станков и с возможностью дополнительной модификации указанного существующего классификатора неисправностей на основе первого множества наборов данных о рабочем состоянии первого множества механических станков.
Предпочтительно, идентификация неисправности включает идентификацию конкретной неисправности указанного по меньшей мере одного заданного механического станка и прогнозирование отказа указанного по меньшей мере одного заданного механического станка вследствие указанной конкретной неисправности при отсутствии выполнения рекомендованной операции по его техническому обслуживанию, такой что указанный по меньшей мере один заданный механический станок действительно выйдет из строя при отсутствии выполнения рекомендованной операции по техническому обслуживанию.
Предпочтительно, существующий классификатор неисправностей содержит нейронную сеть, а модификация существующего классификатора неисправностей включает добавление в нейронную сеть по меньшей мере одного слоя соответствия, причем помимо добавления указанного по меньшей мере одного слоя соответствия, нейронная сеть в остальном является немодифицированной посредством указанной модификации.
Предпочтительно, нейронная сеть, содержащая существующий классификатор неисправностей, содержит слой данных и входной слой для приема данных от слоя данных, причем указанный по меньшей мере один слой соответствия добавляют между слоем данных и входным слоем, а указанный по меньшей мере один слой соответствия выполнен с возможностью приема данных от слоя данных в модифицированном классификаторе неисправностей.
Предпочтительно, первое множество датчиков имеет первое распределение частотной характеристики, а второе множество датчиков имеет второе распределение частотной характеристики, причем слой соответствия выполнен с возможностью осуществления соответствия между первым и вторым распределениями частотной характеристики.
В соответствии с одним предпочтительным вариантом осуществления системы согласно настоящему изобретению первое множество датчиков выполнено с возможностью восприятия одинакового типа сигнала, что и второе множество датчиков.
Предпочтительно, указанный одинаковый тип сигнала содержит один из сигнала вибрации, сигнала магнитного потока, сигнала тока, температуры и внутреннего давления станка.
В соответствии с другим предпочтительным вариантом осуществления системы согласно настоящему изобретению первое множество датчиков и второе множество датчиков выполнены с возможностью восприятия взаимно различных типов сигналов.
Предпочтительно, взаимно различные типы сигналов содержат по меньшей мере один из следующих сигналов: сигналы вибрации и магнитного потока, сигналы вибрации и электрического тока, сигналы вибрации и температуры, сигналы электрического тока и магнитного потока и сигналы вибрации и внутреннего давления станка.
Предпочтительно, по меньшей мере некоторые из рабочих состояний механического станка из первого множества механических станков, как указано посредством первого множества наборов данных о рабочем состоянии, представляют собой неисправные рабочие состояния.
В соответствии с еще одним предпочтительным вариантом осуществления системы согласно настоящему изобретению первое множество наборов сигналов и первое множество наборов данных о рабочем состоянии первого множества механических станков содержат менее 30 неисправных рабочих состояний.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет более полно понято и оценено из последующего подробного описания в сочетании с чертежами, на которых:
На фиг. 1 показана упрощенная структурная схема высокого уровня, иллюстрирующая систему для идентификации неисправностей механических станков, сконструированную и выполненную в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
На фиг. 2 показана упрощенная структурная схема высокого уровня, иллюстрирующая систему для идентификации неисправностей механических станков, сконструированную и выполненную в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения;
На фиг. 3 показана упрощенная иллюстрация модификации классификатора неисправностей, выполненной системой типа, показанного на фиг. 1 или фиг. 2;
На фиг. 4A и 4B показаны соответствующие упрощенные иллюстрации структурных схем компонентов соответствующих систем для обучения классификатора неисправностей, используемого и модифицированного системой по фиг. 1 или фиг. 2;
На фиг. 5A-5D показаны графики, изображающие производительность системы типа, показанного на фиг. 1 или фиг. 2, для идентификации неисправности механических станков; и
На фиг. 6 показана упрощенная блок-схема, иллюстрирующая этапы способа идентификации неисправности механического станка в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Теперь обратимся к фиг. 1, на которой показана упрощенная структурная схема высокого уровня системы для идентификации неисправности механического станка, сконструированной и выполненной в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Как видно на фиг. 1, предложена система 100 для идентификации неисправности механического станка. Система 100 предпочтительно содержит первое множество датчиков 102 первого типа, обозначенных здесь как датчик типа S1. Все датчики 102 могут быть одинакового типа, например датчик типа S1, как показано здесь. Альтернативно, первое множество датчиков 102 может содержать более одного типа датчика, например, датчики типов S1, S11 - S1N, как показано на фиг. 2, более подробно описанной ниже. Предпочтительно, датчики 102 соединены с соответствующим первым множеством механических станков 104. Здесь в качестве примера показано, что первое множество механических станков 104 содержит механические станки 1, 2 - N, где N может представлять собой любое количество механических станков, такое как два или более механических станков. Как правило, датчики 102 соединены с механическими станками 104 в компоновке взаимно однозначного соответствия, в которой один из датчиков 102 соединен с соответствующим одним из станков 104. Однако возможны и другие компоновки, в которых один датчик может воспринимать сигналы от более чем одного механического станка 104. Датчики 102 могут осуществлять физический контакт со станками 104, например, могут быть прямо или непрямо смонтированы на станках 104. Альтернативно, датчики 102 могут быть физически отделены от станков 104, например, расположены на заданном расстоянии от станков 104, например, в случае, когда датчики 102 представляют собой оптические датчики.
Датчики 102 могут быть выполнены в виде устройств датчика любого типа, выполненных с возможностью восприятия сигналов, исходящих от механических станков 104. Станки и механические системы с перемещающимися частями, такие как станки, содержащие подшипники, роторы или валы, или двигатели, компрессоры, насосы, вентиляторы, редукторы, охладители и т. д., могут генерировать сигналы во время своей работы. Механические станки 104 могут относиться к любому из вышеупомянутых типов механических систем или к другим типам механических систем, генерирующих сигналы во время своей работы. Предпочтительно, датчики 102 выполнены с возможностью восприятия таких сигналов. Анализ воспринятых сигналов может быть использован для установления состояния станка, от которого исходит воспринятый сигнал, и в некоторых случаях для установления неисправности станка, от которого исходит сигнал. Только в качестве неограничивающего примера, все датчики 102 могут представлять собой датчики вибрации одинакового типа, например, все могут представлять собой одноосевые акселерометры, или все могут представлять собой многоосевые акселерометры, для восприятия вибраций, исходящих от станков 104; все датчики 102 могут представлять собой одинаковый тип датчиков магнитного потока, воспринимающие магнитный поток, исходящий от станков 104; все датчики 102 могут представлять собой датчики электрического тока одинакового типа, воспринимающие изменение электрического тока, генерируемого станками 104; все датчики 102 могут представлять собой датчики температуры одинакового типа, воспринимающих тепло, генерируемое станками 104. Следует понимать, что альтернативно, все датчики 102 могут представлять собой одинаковый тип устройств датчика любого другого типа, выполненных с возможностью восприятия сигналов, исходящих от станков 104 и генерируемых ими, включая сигналы, связанные с работой станка, такие как крутящий момент, смещение, частота входной линии и т. д.. Альтернативно, датчики 102 могут содержать датчики двух или более типов, такие как, только в качестве примера, датчики магнитного потока и датчики вибрации.
Механические станки 1-N, которые являются элементами первого множества механических станков 104, предпочтительно характеризуются одной или более общими характеристиками. Механические станки 1-N могут быть, а могут и не быть одинаковыми станками, при условии, что они имеют хотя бы одну общую характеристику. Например, общие характеристики могут относиться к типу, номеру модели, производителю, физическим характеристикам или размерам, рабочим характеристикам или параметрам или другим общим характеристикам, которые указывают на то, что наблюдаемое поведение одного из механических станков из указанного множества механических станков может быть типичным для другого механического станка из указанного множества механических станков.
Предпочтительно, первое множество датчиков 102 выполнено с возможностью получения первого множества наборов сигналов, исходящих от первого множества механических станков 104. Наборы сигналов могут представлять собой «моментальные сигналы», воспринимаемые соответствующим одним из датчиков 102 в течение короткого периода времени. Например, сигнал может восприниматься в течение нескольких секунд, например, одной-четырех секунд. Альтернативно, каждый набор сигналов может содержать множество «моментальных сигналов» в течение периода времени, например, «моментальные сигналы» в течение четырех секунд, измеряемые каждый час в течение периода в несколько часов, дней или даже месяцев. Альтернативно, каждый набор сигналов может содержать непрерывно отслеживаемые сигналы в течение более длительного периода или более чем одного периода времени. Например, сигнал можно непрерывно отслеживать каждую миллисекунду.
Сигналы, получаемые датчиками 102, могут быть предварительно обработаны, например, посредством возможностей аналоговой или цифровой обработки самого датчика 102 или других аппаратных и/или программных компонентов 108 обработки сигналов. Следует понимать, что хотя процессор 108 обработки сигналов показан на фиг. 1 как отдельный элемент от датчиков 102, функциональность обработки сигналов может быть встроена в один или более датчиков 102. Предварительная обработка сигнала может включать по меньшей мере одно из следующего: оцифровку, сжатие, извлечение признаков и представление сигнала во временной или частотной области.
В одном варианте осуществления настоящего изобретения наборы сигналов, получаемые первым множеством датчиков 102, могут быть загружены на удаленный сервер, такой как облачный сервер. Функциональность 108 обработки сигналов могут выполнять на удаленном сервере. Предпочтительно, наборы сигналов, получаемые первым множеством датчиков 102, накапливаются по мере их получения от первого множества станков 104. Например, наборы сигналов могут накапливаться на облачном сервере.
Система 100 может дополнительно содержать блок 110 сбора данных. Блок 110 сбора данных может быть выполнен с возможностью приема первого множества наборов данных о рабочем состоянии для механических станков из множества механических станков 104, причем каждый набор данных о рабочем состоянии указывает на рабочее состояние механического станка из первого множества механических станков 104, а каждое рабочее состояние связано по меньшей мере с одним из указанных наборов сигналов, получаемых первым множеством датчиков 102.
Данные о рабочем состоянии, собираемые в блоке 110 сбора данных, предпочтительно представлены в виде диагнозов состояния станка, предоставляемых экспертами-людьми, такими как инженеры. Наборы сигналов, получаемые первым множеством датчиков 102, необязательно могут предоставлять на блок 110 сбора данных либо посредством процессора 108 обработки сигналов, и/или прямо или непрямо посредством датчиков 102. Эксперты-люди необязательно могут анализировать наборы сигналов, получаемые первым множеством датчиков 102, и помечать каждый набор сигналов из указанных наборов сигналов как представляющий конкретные рабочие состояния соответствующего механического станка 104, от которого исходят сигналы. Эксперты-люди могут взаимодействовать с пользовательским интерфейсом, например, блока 110 сбора данных или другого устройства, которое обеспечивает связь между экспертом-человеком и блоком 110 сбора данных, для ввода данных о рабочем состоянии. Сигналы и применяемые к ним метки могут накапливать и сохранять в базе данных, расположенной в блоке 110 сбора данных. В одном варианте осуществления настоящего изобретения блок 110 сбора данных может быть расположен на удаленном сервере, таком как облачный сервер.
Идентификация неисправностей экспертами-людьми может включать идентификацию одной или более конкретных неисправностей отслеживаемого станка 104. В зависимости от конкретного отслеживаемого станка 104 конкретная идентифицированная неисправность может содержать износ подшипников станка с вращательным движением, механическую ослабленность, нарушение соосности, нарушение баланса, электрические неисправности или другие неисправности. Альтернативно, идентификация неисправностей может включать идентификацию станка 104, находящегося в неисправном состоянии, то есть в аномальном состоянии по отношению к его нормальному рабочему состоянию, но без идентификации конкретной неисправности. В этом случае идентификация неисправностей экспертом-человеком идентифицирует станок как неработающий нормальным образом, но не идентифицирует, что является конкретной причиной этой ненормальной работы.
Независимо от того, помечены экспертами-людьми или нет конкретные рабочие состояния, представляемые сигналами, наборы сигналов, получаемые датчиками 102, могут содержать как наборы сигналов, соответствующие нормальным исправным рабочим состояниям станков 104, так и наборы сигналов, соответствующие ненормальным неисправным рабочим состояниям станков 104.
Альтернативно, наборы сигналов, получаемые датчиками 102, необязательно содержат наборы сигналов, соответствующие ненормальным неисправным рабочим состояниям станков 104. В соответствии с этим вариантом осуществления настоящего изобретения все станки 104, отслеживаемые датчиками 102, могут находиться в исправном рабочем состоянии. Таким образом, все наборы сигналов и необязательно связанные рабочие состояния станка могут соответствовать нормальным рабочим состояниям станка.
Наборы сигналов, накапливаемые от первого множества станков 104, предпочтительно подаются на существующий классификатор 114 неисправностей, содержащийся в системе 100. В случае, когда система 100 также содержит блок 110 сбора данных, а сигналы являются помеченными, помеченные сигналы предпочтительно совместно предоставляются препроцессором 108 обработки сигналов и блоком 110 сбора данных на существующий классификатор 114 неисправностей.
Существующий классификатор 114 неисправностей может представлять собой алгоритмический классификатор. Например, существующий классификатор 114 неисправностей может храниться на удаленном сервере. Система 100 может содержать энергонезависимый читаемый с помощью компьютера носитель данных, на котором сохранены исполняемые компьютером инструкции для выполнения процессором функциональности существующего классификатора 114 неисправностей. Один или более процессоров, выполняющих существующий классификатор 114 неисправностей, могут представлять собой удаленные процессоры, например, расположенные в облаке, или могут представлять собой локальные процессоры.
Предпочтительно, существующий классификатор 114 неисправностей представляет собой классификатор неисправностей, который был предварительно обучен для автоматической идентификации неисправностей второго множества механических станков на основе сигналов, исходящих от них и предварительно получаемых вторым множеством датчиков, причем второе множество датчиков относится к различному типу, чем первое множество датчиков 102. Все второе множество датчиков может быть одинакового типа, причем этот тип может различаться от типа или типов датчиков первого множества датчиков 102. Альтернативно, второе множество датчиков может быть одинакового типа, причем этот тип может различаться по меньшей мере от одного из типов датчиков первого множества датчиков 102. Альтернативно, второе множество датчиков может содержать более одного типа датчиков, причем эти типы могут быть различными типами, чем датчик или датчики первого множества датчиков. Альтернативно, второе множество датчиков может содержать более одного типа датчиков, причем эти типы могут различаться по меньшей мере от одного из типов датчиков первого множества датчиков 102. Предпочтительно, второе множество механических станков имеет указанную по меньшей мере одну общую механическую характеристику, общую для первого множества механических станков 104.
Следует понимать, что классификатор 114 неисправностей называется здесь «существующим», поскольку он может быть существующим в отношении наборов сигналов и необязательных данных о рабочем состоянии, получаемых датчиками 102 от станков 104. Классификатор 114 неисправностей может быть предварительно сгенерирован в более ранний момент времени, до генерации набора данных, содержащего наборы сигналов и необязательные данные о рабочем состоянии станков 104.
Предпочтительно, классификатор 114 неисправностей представляет собой точный классификатор, выполненный с возможностью точной идентификации неисправностей механических станков, имеющих указанную по меньшей мере одну общую характеристику, на основе сигналов, получаемых вторым множеством датчиков. Классификатор 114 неисправностей может представлять собой такой точный классификатор благодаря тому, что он был предварительно обучен с использованием машинного обучения на большом наборе данных, содержащем сигналы и, возможно, связанные данные о рабочем состоянии, получаемые от большого количества станков. Как хорошо известно специалистам в данной области техники, чем больший объем данных подают в классификатор неисправностей машинного обучения с целью его обучения, тем точнее до заданного предела может работать этот классификатор. Например, классификатор 114 неисправностей может быть обучен с использованием данных, воспринятых от более чем 40 000 отдельных станков с вращательным движением, содержащих двигатели, насосы, вентиляторы, охладители, компрессоры и редукторы. Общей характеристикой таких станков может быть наличие в них подшипников. Пример того, как классификатор 114 отказов мог быть предварительно обучен, показан на фиг. 3 - 4B, описанных ниже.
Таким образом, существующий классификатор 114 неисправностей может быть успешно применен к сигналам, исходящим от механических станков, имеющих общие характеристики с механическими станками, на основе данных, на которых был обучен классификатор 114 неисправностей, чтобы идентифицировать их неисправности. Однако следует отметить, что классификатор 114 неисправностей был предварительно обучен на основе сигналов, полученных датчиком определенного типа или типов, а именно вторым множеством датчиков типа, различного от типа первого множества датчиков 102. В результате классификатор 114 неисправностей выполнен с возможностью наиболее успешной классификации и идентификации неисправностей при применении к сигналам, получаемым конкретными датчиками, на основе которых классификатор 114 неисправностей был обучен. Однако в случае, когда сигналы, подаваемые на классификатор 114 неисправностей, получают посредством датчиков различных типов, чем второе множество датчиков, на основе которых был обучен классификатор 114 неисправностей, классификатор 114 неисправностей не сможет точно классифицировать и идентифицировать неисправности на основе этих сигналов. Это связано с различием характеристик датчиков между этими датчиками, то есть вторым множеством датчиков, на основе которых был обучен классификатор 114 неисправностей, и датчиками, например, первым множеством датчиков S1 или первым множеством датчиков S1-S1N (фиг. 2), получившими настоящий сигнал, требующий классификации.
Даже если классификатор 114 неисправностей представляет собой высокоточный классификатор для идентификации неисправностей на основе сигналов, получаемых вторым множеством датчиков, классификатор неисправностей, следовательно, имеет ограниченное применение, если таковое вообще имеется, при идентификации неисправностей, получаемых различными типами датчиков, например, первым множеством датчиков S1 или S1-S1N (фиг. 2). Если к сигналам, получаемым первым множеством датчиков, применить классификатор 114 неисправностей, результаты будут неточными.
Это можно проиллюстрировать на примере двух типов датчиков вибрации, таких как трехосевой акселерометр и одноосевой акселерометр, воспринимающих сигналы вибрации, генерируемые механическим станком. Эти два типа датчиков вибрации различаются друг от друга различными параметрами, такими как геометрия, масса, внутренние материалы и т.д., что приводит к различиям в моментах инерции и резонансных частотах соответствующих датчиков. В результате датчики имеют взаимно различные частотные характеристики. Конкретный сигнал, генерируемый отслеживаемым механическим станком, будет различным образом восприниматься и записываться этими двумя датчиками вследствие присущих им различий между датчиками. Кроме того, если эти два датчика смонтированы в различных местоположениях на отслеживаемом таким образом станке, это различие будет еще больше усугубляться вследствие того, что датчики измеряют вдоль взаимно различных осей измерения, и вследствие различных уровней вибрации, измеряемых благодаря различию в местоположении.
Например, в случае трехосевого акселерометра и одноосевого акселерометра, смонтированных на цилиндрическом станке, эти два типа акселерометров будут измерять взаимно различные уровни вибрации, поскольку трехосевой акселерометр будет измерять радиальную вибрацию по одной оси и тангенциальную вибрацию по двум осям, тогда как одноосевой акселерометр будет измерять радиальную или прямую вибрацию.
Следовательно, использование классификатора обнаружения неисправностей, обученного с помощью сигналов, полученных от датчика одного типа, например сигналов вибрации, полученных трехосевым акселерометром, приведет к неправильным результатам классификации при применении к тому же типу сигналов, получаемых от датчика различного типа, например, сигналам вибрации, получаемым одноосевым акселерометром.
Это может быть дополнительно проиллюстрировано ссылкой на более экстремальный случай двух типов датчиков, воспринимающих различные типы сигналов, таких как датчик вибрации и датчик магнитного потока, воспринимающих сигналы вибрации и магнитного потока, соответственно, исходящие от конкретного механического станка. Классификатор обнаружения неисправностей, обученный с использованием данных, полученных от одного из этих типов датчиков, например, сигналов вибрации, полученных датчиком вибрации, будет ограничен классификацией сигналов вибрации и будет предоставлять плохие результаты с малой релевантностью при его применении для идентификации неисправностей, например, для сигналов магнитного потока, генерируемых тем же станком.
Для того, чтобы предложить классификатор неисправностей, выполненный с возможностью точной классификации сигналов, получаемых датчиком типа, различного от того, на основе которого предварительно был обучен классификатор неисправностей, на основе сигналов, получаемых указанным датчиком различного типа, например, первым множеством датчиков S1 или S1, S11-S1N (фиг. 2), может быть обучен полностью новый классификатор неисправностей. В этом случае существующий классификатор 114 неисправностей не используется, и для идентификации неисправностей механических станков, таких как станки 104, разрабатывается новый классификатор неисправностей. Однако для того, чтобы этот новый классификатор обеспечивал точную идентификацию неисправностей, необходимо подавать на него большой объем новых данных, получаемых от датчиков различного типа, например, от первого множества датчиков S1 или первого множества датчиков S1-S1N (фиг. 2), на основе чего должен быть обучен этот классификатор неисправностей. Такой процесс может быть длительным, а также может быть недоступен такой большой объем данных. Кроме того, такой процесс также сильно ограничен по производительности и объему применения вследствие множества параметров, управляющих частотной зависимостью сигналов станка, таких как монтажное местоположение датчика, его ориентация, тип монтажа и т.д. Кроме того, при таком подходе возможности исходного существующего классификатора 114 неисправностей просто тратятся впустую, а не используются, поскольку предыдущий классификатор 114 неисправностей вообще не применяется.
Настоящее изобретение преимущественно предлагает решение проблемы ограниченного использования, если таковое вообще имеется, классификатора неисправностей, обученного на данных, полученных от датчиков определенного типа или типов, для классификации сигналов, получаемых от датчиков различного типа или типов, вследствие различий в характеристиках датчиков. Преимущественно, настоящее изобретение не требует обучения «с нуля» нового классификатора на основе сигналов от датчика различного типа. Напротив, в настоящем изобретении используется подход переноса обучения для соответствия между исходным типом (типами) датчика, на основе которого был обучен существующий классификатор, и новым, различным типом (типами) датчика, от которых получают новые данные, требующие классификации.
В настоящем изобретении могут использовать существующий классификатор 114 посредством модификации этого существующего классификатора 114 на основе соответствия между различными распределениями частотных характеристик датчиков соответствующих датчиков различных типов и для выполнения такого соответствия и модификации требует только небольшого набора данных от указанных различных типов датчиков, например, первого множества датчиков 102. В предпочтительном варианте осуществления настоящего изобретения таким образом на основе исходного существующего классификатора 114 и небольшого нового набора данных, получаемого от датчиков типа или типов, отличных от типа или типов датчиков, на которых был основан существующий классификатор 114, может быть сгенерирован модифицированный классификатор. Этот модифицированный классификатор может быть выполнен с возможностью точной идентификации неисправностей в сигналах, получаемых указанными различными типами датчиков, например, первым множеством датчиков 102, несмотря на небольшой набор данных, подаваемых на него. Модифицированный классификатор использует исходный существующий классификатор 114 и осуществляет соответствие его с датчиками различного типа, например, первым множеством датчиков 102, таким образом, что он выполнен с возможностью точного применения к сигналам, получаемым датчиками указанного различного типа.
Однако следует отметить, что настоящее изобретение может быть полезным даже в случае доступности большого высококачественного набора данных от датчиков различного типа, например, от первого множества датчиков 102. Хотя в этом случае, поскольку доступен большой высококачественный набор данных, для получения адекватных результатов может быть обучен новый специализированный классификатор, использование переноса обучения для модификации существующего классификатора все же может быть преимущественным для того, чтобы воспользоваться преимуществом возможностей исходного существующего классификатора. Таким образом, хотя предполагается, что настоящее изобретение будет наиболее полезным в случаях, когда для обучения нового классификатора недоступны достаточные данные с точки зрения количества и/или качества, настоящее изобретение также может быть полезным в случае, когда доступен большой высококачественный набор данных.
Таким образом, в случае существующего точного классификатора неисправностей, обученного с использованием сигналов, полученных датчиками конкретного типа или типов, в настоящем изобретении предложено решение для модификации указанного классификатора таким образом, что он выполнен с возможностью точной классификации сигналов, получаемых датчиками любого другого типа или типов, отличных от конкретного типа или типов датчиков, на основе которых был обучен этот классификатор неисправностей, если эти сигналы, исходящие от станков, имеют по меньшей мере одну общую характеристику с теми станками, на основе которых классификатор был предварительно обучен. Это можно назвать подходом, не зависящим от датчика, при котором классификатор может быть откалиброван таким образом, что будет выполнен с возможностью применения к данным, получаемым любым датчиком, независимо от типа и/или структуры исходных данных, собираемых этим датчиком.
Подход в соответствии с настоящим изобретением может быть применим в случае сигнала одинакового типа, например, сигналов вибрации, получаемых датчиками вибрации различных типов. Результаты этого показаны на фиг. 5A-5C. Подход в соответствии с настоящим изобретением также может быть применим в случае сигнала различного типа, например, сигналов вибрации и магнитных сигналов, получаемых различными типами датчиков, например, датчиками вибрации и датчиками магнитного потока. Результаты этого показаны на рис. 5D.
В обоих случаях исходный существующий классификатор может быть модифицирован на основе соответствия распределений частотных характеристик датчиков, чтобы создать модифицированный классификатор, выполненный с возможностью идентификации неисправностей в сигналах, получаемых датчиками типа, отличного от тех, на основе которых был обучен указанный существующий классификатор. В обоих случаях модифицированный классификатор может быть применен к сигналам, получаемым датчиками типа, различного от тех, на основе которых был обучен существующий классификатор, с большей точностью, чем можно было бы достичь, применяя существующий классификатор в его исходном немодифицированном виде. Кроме того, в обоих случаях модифицированный классификатор может быть применен к сигналам, получаемым датчиками типа, различного от тех, на основе которых был обучен существующий классификатор, с большей точностью, чем это было бы достигнуто при применении нового классификатора, обученного с использованием только сигналов, получаемых этими датчиками различного типа.
Получение небольшого нового набора данных от датчиков различного типа, например, первого множества датчиков 102, было описано выше в отношении датчиков 102, получающих сигналы и необязательные связанные данные о рабочем состоянии от станков 104. Получение небольшого набора данных системой по фиг. 1 предпочтительно осуществляют с помощью тех элементов, которые заключены в пунктирную рамку 115.
В варианте осуществления изобретения, показанном на фиг. 1, первое множество датчиков 102 предпочтительно представляет собой все датчики одинакового типа, т.е. датчик типа S1. Однако, как упомянуто выше, первое множество датчиков 102 альтернативно может содержать более одного типа датчиков. На фиг. 2 показан альтернативный вариант осуществления системы 100, обозначенной здесь как система 100A, изображающий введение в первое множество датчиков 102 датчиков более чем одного типа. Теперь со ссылкой на фиг. 2, первое множество датчиков 102 может содержать датчики S1, S11-S1N на каждом из станков 1-N из множества станков 104. Следует понимать, что первое множество датчиков 102 может содержать любое количество датчиков S1-S1N, такое как два или более датчиков. Эти датчики могут представлять собой, например, комбинацию датчиков вибрации, датчиков магнитного потока, датчиков тока, датчиков температуры или датчиков для восприятия других параметров, связанных с работой станков 104, таких как крутящий момент, смещение, частота входной линии и т.д. Датчики S1, S11-S1N могут относиться к взаимно различным типам, но предпочтительно относятся к одинаковому типу в отношении наборов датчиков, соединенных с каждым из станков 104. Однако следует понимать, что система 100A может допускать случай отсутствия некоторых данных от одного из датчиков 102, которые могут быть приписаны, например, с использованием многомерной статистики.
Система 100A может в целом иметь сходство с системой 100, за исключением множества типов датчиков, содержащихся в первом множестве датчиков 102 в системе 110A, и описание системы 100 в целом также применимо к системе 100A.
Продолжая ссылаться на фиг. 1 и 2, небольшой новый набор данных, на основе которого существующий классификатор 114 может быть модифицирован при помощи осуществления соответствия обучения для предоставления модифицированного классификатора, может содержать гораздо меньше данных, чем объем данных, на основе которого был изначально обучен существующий классификатор 114. Например, небольшой новый набор данных может содержать менее 400, менее 300, менее 200, менее 100, менее 50 или менее 30 наборов каждого из первого множества наборов сигналов и, необязательно, первого множества наборов данных о рабочем состоянии первого множества механических станков 104. Кроме того, небольшой новый набор данных может представлять собой еще меньшее количество наборов сигналов, соответствующих неисправному рабочему состоянию механического станка из первого множества механических станков 104, такое как менее 100, менее 90, менее 80, менее 70, менее 60, менее 50, менее 30 или менее 20 наборов сигналов, соответствующих неисправному рабочему состоянию механического станка из первого множества механических станков 104. Как упомянуто выше, в некоторых случаях небольшой новый набор данных может даже не содержать сигналы, соответствующие неисправному рабочему состоянию механического станка из первого множества механических станков 104. Это в отличие от гораздо большего набора данных, на основе которого мог быть обучен существующий классификатор 114, например, несколько тысяч образцов.
Следует понимать, что первое множество датчиков 102 различно от второго множества датчиков, на основе которых был обучен существующий классификатор 114, но что станки 104 предпочтительно имеют общие характеристики как друг с другом, так и со станками, на основе которых был обучен существующий классификатор 114. Станки 104 могут быть одинаковыми, как те станки, на основе которых предварительно был обучен существующий классификатор 114, а могут и не быть.
Первое множество наборов сигналов, получаемых первым множеством датчиков 102, и, необязательно, первое множество наборов данных о рабочем состоянии, собираемых в блоке 110 сбора данных первого множества механических станков 104, могут подавать на существующий классификатор 114 неисправностей. Первое множество наборов сигналов перед их предоставлением на существующий классификатор 114 неисправностей могут предварительно обрабатывать при помощи процессора 108 обработки сигналов.
Затем существующий классификатор 114 неисправностей предпочтительно модифицируют на основе указанного множества наборов сигналов и, необязательно, множества наборов данных о рабочем состоянии первого множества механических станков 104, тем самым производя модифицированный классификатор 116.
Модифицированный классификатор 116 может представлять собой алгоритмический классификатор, исполняемый одним или более процессорами, которые могут быть теми же или различными процессорами, что и процессоры, выполняющие существующий классификатор 114. Например, существующий классификатор 114 и модифицированный классификатор 116 могут быть реализованы в блоке обработки данных. Указанный один или более процессоров, выполняющих существующий классификатор 116 неисправностей, могут представлять собой удаленные процессоры, например, расположенные в облаке, или могут представлять собой локальные процессоры. Например, указанный один или более процессоров, выполняющих модифицированный классификатор 116, могут быть расположены в одном из датчиков 102.
Существующий классификатор 114 неисправностей модифицируют посредством настройки классификатора на новый набор данных, содержащий множество наборов сигналов, получаемых датчиками 102, и, необязательно, множество наборов данных о рабочем состоянии первого множества механических станков 104. Например, как видно на фиг. 1, в случае, когда первое множество датчиков 102 содержит только тип S1 датчика, модифицированный классификатор 116 может быть адаптирован к типу S1 датчика. Кроме того, в качестве примера, как показано на фиг. 2, в случае, когда первое множество датчиков содержит множество типов S1, S11 датчиков и т.д., модифицированный классификатор 116 может быть адаптирован к этому множеству типов датчиков. Благодаря настройке существующего классификатора 114 для создания модифицированного классификатора 116 этот классификатор калибруют таким образом, чтобы он стал применим к набору данных, различному от того набора данных, на основе которого этот классификатор был изначально обучен. Настройка включает соответствие между исходными характеристиками датчика, на основе которых предварительно был обучен классификатор 114, и характеристик датчика первого множества датчиков 102.
В одном варианте осуществления настоящего изобретения настройка включает соответствие между распределением частотных характеристик исходного множества датчиков, на основе которого предварительно был обучен классификатор 114, и распределением частотных характеристик датчиков первого множества датчиков 102. Это соответствие может быть выполнено между распределениями частотных характеристик датчиков, а не просто частотными характеристиками датчиков, поскольку частотные характеристики как датчиков, на основе которых классификатор 114 был предварительно обучен, так и первого множества датчиков 102, могут быть распределены. Это распределение может возникать вследствие реальных различий между датчиками в каждом множестве, таких как различия в характеристиках станка, различия в местоположении датчика, монтаже датчика, точном типе монтажа датчика и т.д.
Соответствие могут выполнять контролируемым образом. В этом варианте осуществления в системе 100 может содержаться блок 110 сбора данных, а помеченные сигналы подают на существующий классификатор 114 неисправностей. Дополнительные подробности, касающиеся того, как существующий классификатор 114 неисправностей модифицируют при помощи соответствия между датчиками контролируемым образом, представлены ниже со ссылкой на фиг. 3.
Альтернативно, соответствие могут выполнять неконтролируемым образом. В этом случае в системе 100 не обязательно должен содержаться блок 110 сбора, а сигналы без соответствующих рабочих состояний подают на существующий классификатор 114 неисправностей. Существующий классификатор 114 неисправностей может быть модифицирован при помощи неконтролируемого обучения для соответствия различий между распределениями частотных характеристик датчиков, на основе которых был предварительно обучен классификатор 114, и новых датчиков, например, первого множества датчиков 102.
Альтернативно, соответствие могут выполнять полуконтролируемым образом, в котором помеченные сигналы подают на существующий классификатор 114 неисправностей, а соответствие между датчиками для создания модифицированного классификатора 116 выполняют неконтролируемым образом. Дополнительные подробности, относящиеся к неконтролируемому соответствию, представлены ниже со ссылкой на фиг. 3-4B.
Модифицированный классификатор 116, адаптированный посредством соответствия таким образом, что применим к данным от первого множества датчиков 102, теперь готов к использованию для классификации сигналов, получаемых датчиками того же типа или типов, что и первое множество датчиков 102.
Пример использования модифицированного классификатора 116 для идентификации неисправностей в сигналах, получаемых датчиком того же типа, что и первое множество датчиков 102, дополнительно показан на фиг. 1 и 2. Как видно на фиг. 1 и 2, по меньшей мере один датчик 122, например, датчик S1 на фиг. 1 и датчики S1-S1N на фиг. 2, может получать по меньшей мере один набор сигналов, исходящих по меньшей мере от одного заданного механического станка, здесь обозначенного как механический станок X, указанный ссылочным обозначением 124. Механический станок 124 может иметь по меньшей мере одну общую характеристику с первым множеством механических станков 104, а также с множеством механических станков, на основе сигналов от которых был обучен существующий классификатор 114 неисправностей. Механический станок 124 может быть элементом первого множества механических станков 104, а может и не быть. Следует понимать, что хотя механический станок 124 показан здесь реализованным в виде одного станка, это сделано только в целях простоты, и система 100 может содержать любое количество механических станков 124, например один, два или более механических станков 124, которые могут быть или не быть одинаковыми друг с другом при условии, что станки 124 имеют указанную по меньшей мере одну общую характеристику, как описано выше.
По меньшей мере один датчик 122 является одним из первого множества датчиков 102, что означает, что датчик 122 имеет тот же тип, что и первое множество датчиков 102. Как показано на фиг. 1, в случае, когда первое множество датчиков 102 содержит один тип датчиков, т.е. датчик S1, датчик 122 также относится к типу датчика S1. Как показано на фиг. 2, в случае, когда первое множество датчиков 102 содержит множество типов датчиков, т.е. датчики S1-S1N, по меньшей мере один датчик 122 также содержит то же множество типов датчиков, т.е. датчики S1-S1N. По меньшей мере один датчик 122 предпочтительно выполнен с возможностью получения по меньшей мере одного набора сигналов, исходящих от заданного механического станка 124. Наборы сигналов могут представлять собой «моментальные сигналы», воспринимаемые по меньшей мере одним датчиком 122 в течение короткого периода времени. Например, сигнал может восприниматься в течение нескольких секунд, например, одной-четырех секунд. Альтернативно, наборы сигналов могут содержать множество «моментальных сигналов» в течение периода времени, например, «моментальные сигналы» в течение четырех секунд, измеряемые каждый час в течение периода в несколько часов, дней или даже месяцев. Альтернативно, наборы сигналов могут содержать непрерывно отслеживаемые сигналы в течение более длительного периода или более чем одного периода времени. Например, сигнал можно непрерывно отслеживать каждую миллисекунду.
Сигналы, получаемые по меньшей мере одним датчиком 122, могут быть предварительно обработаны, например, с помощью возможностей аналоговой или цифровой обработки самого датчика 122 или других аппаратных и/или программных компонентов 128 обработки сигналов. Следует понимать, что хотя процессор 128 обработки сигналов показан на фиг. 1 и 2 как отдельный элемент по меньшей мере от одного датчика 122, функциональность обработки сигналов может быть встроена в один или более датчиков 122. Предварительная обработка сигнала может включать по меньшей мере одно из следующего: оцифровку, сжатие, извлечение признаков и представление сигнала во временной или частотной области.
В одном варианте осуществления настоящего изобретения сигналы, получаемые по меньшей мере одним датчиком 122, могут быть загружены на удаленный сервер, такой как облачный сервер. Функциональность 128 обработки сигналов может выполняться на удаленном сервере.
Набор сигналов, получаемый по меньшей мере одним датчиком, здесь в качестве примера реализованном в виде датчика 122, исходящим по меньшей мере от одного заданного механического станка, здесь в качестве примера реализованном в виде механического станка X, может быть предоставлен на модифицированный классификатор 116. Модифицированный классификатор 116 может быть выполнен с возможностью автоматической идентификации по меньшей мере одной неисправности механического станка X на основе набора исходящих от него сигналов. Следует понимать, что модифицированный классификатор 116 может точно применяться к сигналам, получаемым по меньшей мере одним датчиком 122, поскольку модифицированный классификатор 116 адаптирован для классификации сигналов, получаемых датчиками типа первого множества датчиков 102.
Идентификация неисправностей модифицированным классификатором 116 может включать идентификацию одной или более конкретных неисправностей отслеживаемого станка 104. В зависимости от конкретного отслеживаемого станка 104 конкретная идентифицированная неисправность может содержать износ подшипников станка с вращательным движением, механическую ослабленность, нарушение соосности, нарушение баланса, электрические неисправности или другие неисправности.
Альтернативно, идентификация неисправностей может включать идентификацию станка X, находящегося в неисправном состоянии, то есть в аномальном состоянии по отношению к его нормальному рабочему состоянию, но без идентификации конкретной неисправности. В этом случае идентификация неисправности идентифицирует станок как неработающий нормальным образом, но не идентифицирует, что является конкретной причиной этой ненормальной работы.
Системы 100 и 100A могут дополнительно содержать устройство 130 вывода. Устройство 130 вывода может быть выполнено с возможностью получения выходных данных об идентификации неисправности от модифицированного классификатора 116 и предоставления воспринимаемых человеком выходных данных, содержащих по меньшей мере идентификацию неисправности по меньшей мере одного заданного механического станка 124. Воспринимаемые человеком выходные данные могут содержать по меньшей мере одни из визуальных, тактильных или звуковых выходных данных. Предпочтительно, по меньшей мере одну операцию по ремонту или техническому обслуживанию выполняют на основе указанных воспринимаемых человеком выходных данных.
Например, в случае, когда модифицированный классификатор 116 выполняется удаленным процессором, выходные данные об идентификации неисправности модифицированного классификатора 116 могут быть переданы на устройство 130 вывода.
Выходное устройство 130 также может быть выполнено с возможностью прогнозирования отказа по меньшей мере одного заданного механического станка 124 вследствие неисправности, идентифицированной модифицированным классификатором 116, при отсутствии выполнения рекомендованной операции по техническому обслуживанию, такой что по меньшей мере один заданный механический станок 124 действительно выйдет из строя при отсутствии выполнения рекомендованной операции по техническому обслуживанию.
В некоторых случаях техническое обслуживание 132 заданного станка 124 могут выполнять в ответ на воспринимаемые человеком выходные данные, предоставляемые устройством 130 вывода. Устройство 130 вывода необязательно может быть функционально соединено с контроллером станка 124, и работу станка 124 могут регулировать в ответ на идентификацию неисправности. Например, станок 124 может быть выключен, может работать на пониженной мощности или отрегулирован иным образом. Такая регулировка может быть автоматической или может управляться экспертом-человеком в ответ на воспринимаемые человеком выходные данные, предоставляемые устройством 130 вывода.
Дополнительные подробности о самом существующем классификаторе 114 и о том, как можно адаптировать или откалибровать существующий классификатор 114 для создания модифицированного классификатора 116, теперь представлены со ссылкой на фиг. 3-4B, на которых показаны упрощенная иллюстрация модификации классификатора, осуществляемая любой из систем типов, показанных на фиг. 1 и 2, и упрощенные соответствующие структурные схемы компонентов двух возможных систем для обучения классификатора, используемого в системе по фиг. 1 или 2, соответственно. В одном варианте осуществления настоящего изобретения системы 100 и 100A могут содержать энергонезависимый читаемый с помощью носитель данных, на котором сохранены исполняемые компьютером инструкции для выполнения одним или более процессорами способа модификации классификатора, как подробно описано ниже в отношении фиг. 4A и 4B. Такие процессоры могут представлять собой удаленные процессоры или локальные процессоры.
Как видно на фиг. 3, существующий классификатор 114 неисправностей может представлять собой классификатор 300 искусственной нейронной сети (ИНС) для контролируемого обнаружения неисправностей и аномалий. Например, ИНС 300 может быть выполнена с возможностью идентификации конкретной неисправности или аномалии работы в станках, имеющих вращающийся компонент. Без потери общности классификатор 114 неисправностей, имеющий многослойную архитектуру персептрона, показан на фиг. 3. Однако следует понимать, что системы и способы в соответствии с настоящим изобретением могут быть применены к классификатору неисправностей любого типа независимо от его структуры. В частности, числовые слои и нейроны, показанные на фиг. 3, приведены только в качестве очень упрощенного примера с целью иллюстрации принципов настоящего изобретения. Кроме того, существующий классификатор 114 неисправностей может представлять собой неконтролируемый классификатор неисправностей, как описан выше, таким как автокодировщик, глубокая сеть доверия, классификатор на основе кластеризации по K-средним или скрытых марковских моделях, или любой другой тип модели, выполненный с возможностью проведения неконтролируемого обучения.
На верхней панели 302 на фиг. 3 показан пример существующего классификатора 114 в его исходном немодифицированном виде, после его обучения и до какой-либо его модификации с целью соответствия между типами датчиков в соответствии с настоящим изобретением.
Существующий классификатор 114 может иметь многослойную архитектуру. Слой 308 данных может представлять собой слой, содержащий входные данные в виде наборов сигналов датчиков. Входной слой 310 может представлять собой исходный слой, на котором наборы сигналов датчиков вводят в сеть 300. На каждом из множества последующих скрытых слоев 312 наборы сигналов объединяют с соответствующими весовыми коэффициентами и функцией активации, применяемой к объединенному выходу слоя, прежде чем перенаправить его на следующий слой из скрытых слоев 312. Этот процесс повторяется для каждого слоя из скрытых слоев 312, пока не будет достигнут выходной слой 314. Выходной слой 314 выдает показатель неисправности. Этот показатель представляет собой идентификацию неисправности. Идентификация неисправности может включать идентификацию настоящей конкретной неисправности или аномалии или прогноз предстоящей в будущем конкретной неисправности. Неисправность может содержать любой тип аномалии станка.
Общее математическое выражение для архитектуры ИНС, показанной на панели 302 на фиг. 3, в пределах сетевых слоев
где s - это вход нейрона, который для первого слоя 310 представляет собой сигнал датчика, σ - функция активации, ω - вес, b - член смещения, а i и j - индексы, которые работают на входных точках данных слоя и нейронах, соответственно.
Обучение сети 300 для создания существующего классификатора 114 может быть лучше понято с помощью дополнительной ссылки на фиг. 4A и 4B.
Обратимся сначала к фиг. 4A, система 400 для обучения существующего классификатора 114 может содержать второе множество датчиков 402. Датчики 402 предпочтительно соединены с соответствующим вторым множеством механических станков 404. Все из второго множества датчиков 402 могут быть все одинакового второго типа, обозначенного здесь как тип S2 датчика. Альтернативно, датчики 402 могут содержать множество типов датчиков, соединенных с каждым соответствующим одним из второго множества механических станков 404. Случай второго множества датчиков 402, содержащего множество типов датчиков, показан в системе 400A на фиг. 4B. Система 400А в целом имеет сходство с системой 400, за исключением включения в нее множества типов датчиков 402. Обратимся теперь к фиг. 4B, следует понимать, что второе множество датчиков 402, показанных на фиг. 4B, может содержать любое количество датчиков S2-S2N, например, два или более датчиков. Эти датчики могут представлять собой, например, комбинацию датчиков вибрации, датчиков магнитного потока, датчиков тока, датчиков температуры или датчиков для восприятия других параметров, связанных с работой станков 404, таких как крутящий момент, смещение, частота входной линии и т.д. Датчики S2-S2N могут относиться к взаимно различным типам, но предпочтительно относятся к одинаковому типу в отношении каждого из наборов датчиков, соединенных с каждым из станков 404.
Датчики 402, например датчик S2 или датчики S2-S2N, могут отличаться от первого множества датчиков 102 на фиг. 1 или отличаться от типов S1-S1N датчиков первого множества датчиков 102 на фиг. 2. Возможна любая комбинация вариантов осуществления, показанных на фиг. 1 и 2, а также 4A и 4B, то есть первое множество датчиков 102 может содержать только один тип датчика S1, а второе множество датчиков 402 может содержать только один тип датчика S2, различного от S1 (вариант осуществления, показанный на фиг. 1 и фиг. 4А); первое множество датчиков 102 может содержать датчик только одного типа S1, а второе множество датчиков 402 может содержать множество типов датчиков S2-S2N, по меньшей мере некоторые из которых различаются от S1 (вариант осуществления, показанный на фиг. 1 и фиг. 4B); первое множество датчиков 102 может содержать множество типов датчиков S1-S1N, а второе множество датчиков 402 может содержать только один тип датчиков S2, который различается по меньшей мере от некоторых из S1-S1N (вариант осуществления, показанный фиг. 2 и фиг. 4A); первое множество датчиков 102 может содержать множество типов датчиков S1-S1N, и второе множество датчиков 402 может содержать множество типов датчиков S2-S2N, по меньшей мере некоторые из которых различаются от S1-S1N (вариант осуществления, показанный на фиг. 2 и фиг. 4B).
В некоторых вариантах осуществления первое и второе множество датчиков 102 и 402 могут содержать некоторые общие датчики, например, первое множество датчиков 102 может содержать датчики вибрации и магнитные датчики, а второе множество датчиков 402 может содержать только магнитные датчики.
Здесь, в качестве примера, второе множество механических станков 404 показано как содержащее механические станки 1, 2 - N, где N может представлять собой любое количество механических станков, например два или более механических станков. Как правило, датчики 402 соединены с механическими станками 404 в компоновке взаимно однозначного соответствия, причем один из датчиков 402 соединен с соответствующим одним из станков 404. Однако возможны и другие компоновки, в которых один датчик может быть выполнен с возможностью восприятия сигналов более чем от одного механического станка 404. Датчики 402 могут осуществлять физический контакт со станками 404, например, могут быть прямо или непрямо смонтированы на станках 404. Альтернативно, датчики 402 могут быть физически отделены от станков 404, например, расположены на заданном расстоянии от станков 404, например, в случае, когда датчики 402 представляют собой оптические датчики.
В одном варианте осуществления настоящего изобретения датчики из второго множества датчиков 402 могут иметь в целом одинаковую частотную характеристику. Частотная характеристика второго множества датчиков 402 может быть названа распределением частотной характеристики датчиков 402. Первое множество датчиков 102 также может иметь в целом одинаковую частотную характеристику. Частотная характеристика первого множества датчиков 102 может быть названа распределением частотной характеристики датчиков 102. Благодаря тому, что датчики 402 относятся к различному типу, чем датчики 102, распределение частотной характеристики первого множества датчиков 102 различается от распределения частотной характеристики второго множества датчиков 402. Например, первое множество датчиков 102 может представлять собой одноосевые датчики вибрации, а второе множество датчиков 402 может представлять собой многоосевые датчики вибрации, или наоборот, или первое множество датчиков может представлять собой одноосевые датчики вибрации, а второе множество датчиков может представлять собой датчики магнитного потока. Только в качестве примера, датчики 102 и 402 или датчики 402 и 102 могут измерять сигналы вибрации и магнитного потока; сигналы вибрации и электрического тока; сигналы вибрации и температуры; сигналы электрического тока и магнитного потока; и сигналы вибрации и внутреннего давления станка, соответственно.
Предпочтительно, датчики 402 выполнены с возможностью восприятия сигналов, исходящих от механических станков 404. Механические станки 1-N, которые являются элементами второго множества механических станков 404, предпочтительно характеризуются одной или более характеристиками, общими как друг для друга, так и для механических станков 104. Механические станки 1-N могут быть, а могут и не быть одинаковыми станками, при условии, что они имеют хотя бы одну общую характеристику. Например, общие характеристики могут относиться к типу, номеру модели, производителю, физическим характеристикам или размерам, рабочим характеристикам или параметрам или другим общим характеристикам, которые указывают на то, что наблюдаемое поведение одного из механических станков из множества механических станков может быть типичным для другого механического станка из этого множества.
Предпочтительно, второе множество датчиков 402 выполнено с возможностью получения второго множества наборов сигналов, исходящих от второго множества механических станков 404. Наборы сигналов могут представлять собой «моментальные сигналы», воспринимаемые соответствующим одним из датчиков 402 в течение короткого периода времени. Например, сигнал может восприниматься в течение нескольких секунд, например, одной-четырех секунд. Альтернативно, каждый набор сигналов может содержать множество «моментальных сигналов» в течение периода времени, например, «моментальные сигналы» в течение четырех секунд, измеряемые каждый час в течение периода в несколько часов, дней или даже месяцев. Альтернативно, каждый набор сигналов может содержать непрерывно отслеживаемые сигналы в течение более длительного периода или более чем одного периода времени. Например, сигнал можно непрерывно отслеживать каждую миллисекунду.
Сигналы, получаемые датчиками 402, могут быть предварительно обработаны, например, с помощью возможностей аналоговой или цифровой обработки самого датчика 402 или других аппаратных и/или программных обрабатывающих компонентов 408. Например, сигнал может представлять собой по меньшей мере один из следующих сигналов: оцифрованный, сжатый, из сигнала могут быть извлечены признаки, и сигналы могут быть представлены во временной или частотной области.
Системы 400 и 400A могут необязательно содержать блок 410 сбора данных. Предпочтительно, блок 410 сбора данных выполнен с возможностью приема второго множества наборов данных о рабочем состоянии для механических станков из второго множества механических станков, причем каждый набор данных о рабочем состоянии указывает на рабочее состояние механического станка из указанного второго множества механических станков 404, и каждое рабочее состояние связано по меньшей мере с одним из наборов сигналов, получаемых вторым множеством датчиков 402.
Данные о рабочем состоянии, собираемые в блоке 410 сбора данных, предпочтительно представлены в виде диагнозов состояния станка, предоставляемых экспертами-людьми, такими как инженеры. Наборы сигналов, получаемые первым множеством датчиков 402, необязательно могут предоставлять на блок 410 сбора данных либо посредством процессора 408 обработки сигналов, и/или прямо или непрямо посредством датчиков 402.
Эти эксперты-люди могут анализировать наборы сигналов, получаемые вторым множеством датчиков 402, и помечать каждый набор сигналов из указанных наборов сигналов как представляющий конкретные рабочие состояния соответствующего механического станка 404, от которого исходят сигналы. Эксперты-люди могут взаимодействовать с пользовательским интерфейсом, например, блока 410 сбора данных или другого устройства, которое обеспечивает связь между экспертом-человеком и блоком сбора данных, для ввода данных о рабочем состоянии. Сигналы и применяемые к ним метки могут накапливаться и сохраняться в базе данных в блоке 410 сбора данных. В одном варианте осуществления настоящего изобретения блок 410 сбора данных может быть расположен на удаленном сервере, таком как облачный сервер.
Идентификация неисправностей экспертами-людьми может включать идентификацию одной или более конкретных неисправностей отслеживаемых станков 404. В зависимости от конкретного отслеживаемого станка 404 конкретная идентифицированная неисправность может содержать износ подшипников станка с вращательным движением, механическую ослабленность, нарушение соосности, нарушение баланса, электрические неисправности или другие неисправности. Альтернативно, идентификация неисправностей может включать идентификацию станка 404, находящегося в неисправном состоянии, то есть в аномальном состоянии по отношению к его нормальному рабочему состоянию, но без идентификации конкретной неисправности. В этом случае идентификация неисправностей экспертом-человеком идентифицирует станок как неработающий нормальным образом, но не идентифицирует, что является конкретной причиной этой ненормальной работы.
Следует понимать, что в этом примере системы 400/400A предпочтительно содержат коллектор 410 данных, а сигналы предпочтительно помечают эксперты-люди для того, чтобы обучать классификатор 300 неисправностей контролируемым образом. Однако в других вариантах осуществления настоящего изобретения коллектор 410 данных может быть опущен, и сигналы не обязательно должны быть помечены экспертами-людьми. В этом случае существующий классификатор 114 неисправностей может быть изначально обучен с использованием неконтролируемого обучения.
Возвращаясь теперь к панели 302 на фиг. 3, сеть 300 может быть обучена при помощи подачи на нее наборов сигналов, получаемых вторым множеством датчиков 402, в качестве входных данных на слое 308, и подачи на нее связанных данных о рабочем состоянии, как помечены экспертами-людьми, в качестве требуемого соответствующего выхода на выходном слое 314. Обучение сети 300 может быть выполнено с использованием алгоритмов обратного распространения и градиентного спуска в отношении предварительно заданных меток данных. Параметры обучения, такие как функция потерь, скорость обучения, тип оптимизатора и т.д., предпочтительно выбирают в соответствии с выходным показателем. Например, для обнаружения бинарных неисправностей могут быть выбраны функция потерь перекрестной энтропии, оптимизатор Адама и слагаемое L2-регуляризации. Процесс обучения сначала применяют к набору данных, для которого все датчики 402 совместимы во всем наборе данных, что означает, что предпочтительно не смешивать датчики 402 для каждого вектора в точке данных.
После завершения обучения предпочтительно фиксируются параметры сети 300, установленные на основе обучения. Эти параметры содержат функции активации и веса. Теперь сеть 300 составляет существующий классификатор, такой как существующий классификатор 114, выполненный на основе наборов сигналов датчиков, полученных вторым множеством датчиков 402. Теперь существующий классификатор 114 в форме обученной сети 300, показанной на панели 302, выполнен с возможностью точной классификации новых входных данных, имеющих такую же или аналогичную структуру и получаемых от тех же или аналогичных источников, что и данные, на основе которых был предварительно обучен существующий классификатор 114. В этом случае существующий классификатор 114 в виде обученной сети 300 выполнен с возможностью точной классификации новых входных сигналов, исходящих от станков, имеющих общую характеристику со станками 404 (фиг. 4A и 4B), и воспринимаемых датчиками того же типа, что и второе множество датчиков 402 (фиг. 4A и 4B). Однако, как подробно описано выше, существующий классификатор 114 в виде обученной сети 300 не выполнен с возможностью точной классификации новых входных сигналов, воспринимаемых датчиками различного типа, чем второе множество датчиков 402, таких как первое множество датчиков 102 (фиг. 1 и 2), несмотря на то, что эти новые входные сигналы исходят от станков, имеющих общую характеристику со станками 404, такими как первое множество станков 104. В этом случае точность классификатора будет значительно снижена вследствие различия частотных характеристик этих различных типов датчиков.
Для того, чтобы сделать существующий классификатор 114 способным точно классифицировать наборы сигналов от датчика различного типа, например, первого множества датчиков 102, чем те, на основе которых был предварительно обучен этот классификатор, например, второе множество датчиков 402, существующий классификатор 114 может быть модифицирован. Модификация существующего классификатора 114 в виде сети 300 в соответствии с предпочтительным вариантом осуществления настоящего изобретения показана на нижней панели 440 на фиг. 3.
Как видно на нижней панели 440 на фиг. 3, для создания модифицированной сети 442 может быть модифицирована сеть 300. Предпочтительно, сеть 300 модифицируют посредством добавления в сеть 300 по меньшей мере одного дополнительного слоя 450. Указанный по меньшей мере один дополнительный слой 450 может быть назван «слоем соответствия» и может быть выполнен с возможностью изучения различия частотных характеристик между исходным типом датчика, т.е. вторым множеством датчиков 402, на основе которого был обучен классификатор 114 в виде сети 300, и новым типом датчика, т.е. первым множеством датчиков 102, от которых были собраны новые данные.
Конфигурация слоя 450 соответствия может быть выполнена посредством замораживания структуры и параметров всех слоев сети 300 и переобучения классификатора с помощью нового набора данных, получаемого от первого множества датчиков 102, как это предусмотрено элементами, заключенными в пунктирную рамку 115 и описанными выше в отношении фиг. 1 и 2. Таким образом, сеть 442 вынуждена оптимизировать весовые значения слоя 450 соответствия в отношении различия частотных характеристик двух датчиков, поскольку параметры всех других слоев сети 442 уже сконфигурированы, заморожены и не могут быть изменены. В результате слой 450 соответствия вынужден изучать соответствия между исходными наборами сигналов датчиков, обеспечиваемыми датчиками 402 (фиг. 4A и 4B), и новыми наборами сигналов датчиков, обеспечиваемыми датчиками 102 (фиг. 1 и 2).
Альтернативно, структура и параметры всех слоев сети 300 не обязательно должны быть заморожены, но могут быть настроены во время переобучения классификатора с помощью нового набора данных, получаемого от первого множества датчиков 102. В этом случае параметры сети 300 служат отправной точкой для настроенных параметров модифицированного классификатора 442.
Конфигурацию слоя 450 соответствия предпочтительно выбирают с учетом характера различия частотных характеристик между различными типами датчиков, например, первым и вторым множеством датчиков 102 и 402.
В случае соответствия между различными датчиками одинакового типа, например, если и первое, и второе множество датчиков 102 и 402 представляют собой датчики вибрации, но различных типов, имеющих различные частотные характеристики, разность частотных характеристик обычно представляет собой линейную функцию частоты сигнала.
В случае соответствия между различными датчиками различных типов, например, если первое и второе множество датчиков 102 и 402 представляют собой вибрационные и магнитные датчики, соответственно, имеющие различные частотные характеристики, разность частотных характеристик, как правило, представляет собой нелинейную функцию, следовательно, требуется нелинейное соответствие. Соответственно, функция активации может, но не обязательно, принимать нелинейную форму.
В некоторых случаях соответствие слоя 450 соответствия может быть облегчено путем предоставления слою 450 соответствия более сложных форм новых данных датчика, например, более сложных форм сигналов, получаемых первым множеством датчиков 102. Например, могут быть предоставлены обратные данные, логарифмические данные или другие формы данных. Процесс модификации входного сигнала может быть оптимизирован в отношении точности классификатора, в результате чего новые данные датчика модифицируют в соответствии с обратной связью о характеристиках точности классификатора, и затем повторно обучают слой 450 соответствия с помощью измененных данных.
Предпочтительно, слой 450 соответствия включается в сеть 442 в качестве первого слоя после слоя 308 данных и в силу этого выполнен с возможностью приема входных данных в виде нового набора данных. Слой 450 соответствия находится выше по потоку от исходного входного слоя 310 и предшествует исходному входному слою 310 в отношении входных данных. Местоположение слоя 450 соответствия в сети 442 является важным, поскольку именно местоположение слоя 450 соответствия в качестве начального слоя в сети позволяет слою 450 соответствия изучать соответствие между типами датчиков и адаптировать поступающие новые данные, чтобы они были в надлежащем виде для перехода к другим скрытым слоям 312, расположенным ниже по потоку в сети 442.
В альтернативном варианте осуществления настоящего изобретения существующий классификатор неисправностей может быть изначально обучен неконтролируемым образом посредством предоставления ему большого количества данных датчика для того, чтобы классификатор обучился, как идентифицировать аномалии в данных датчика, относящихся к рабочему состоянию станка. Например, автокодировщик NN могут использовать для изучения низкоразмерного представления данных датчика и классификации на основе кластеризации, а затем использовать для идентификации выбросов (аномалий). Затем такой существующий неконтролируемый классификатор 114 неисправностей может быть модифицирован неконтролируемым образом в соответствии с предпочтительным вариантом осуществления настоящего изобретения для создания модифицированного классификатора 116 неисправностей, адаптированного для идентификации аномалий в данных датчиков, получаемых датчиком различного типа, чем тот, на основе которого изначально был обучен существующий классификатор 114 неисправностей. Модифицированный классификатор 116 неисправностей может быть создан, например, посредством добавления к автокодировщику NN начального слоя соответствия, замораживания параметров всех слоев сети, кроме слоя соответствия, и обучения слоя соответствия изучению соответствия между исходным и новым типами датчиков. Во время обучения слоя соответствия с целью обучения на выходе автокодировщика NN после декодера может быть дополнительно добавлен другой слой соответствия, такой как слой обратного соответствия. Затем для идентификации выбросов (аномалий) выходные данные могут классифицировать с использованием классификации на основе кластеризации.
Улучшение рабочих характеристик классификатора в результате обучения соответствия в соответствии с настоящим изобретением проиллюстрировано на следующих иллюстративных графиках:
На фиг. 5A показан пример производительности модифицированного классификатора в соответствии с настоящим изобретением в виде кривой «полнота-точность» (precision-recall). В этом примере классификатор неисправностей изначально был обучен и проверен на наборе данных, содержащем более 100 000 помеченных наборов сигналов, из которых 7000 наборов сигналов указывали на неисправности станка, полученные от станков с вращательным движением, содержащих подшипники, посредством одноосевых датчиков вибрации. После обучения классификатор неисправностей был протестирован на наборе данных, содержащем 20 000 наборов сигналов, 1400 из которых соответствовали неисправностям станка. Обученный таким образом классификатор неисправностей можно назвать существующим классификатором неисправностей.
Затем существующий классификатор был модифицирован в соответствии с предпочтительным вариантом осуществления настоящего изобретения с обеспечением возможности классификации неисправностей на основе сигналов, получаемых трехосевыми датчиками вибрации от станков с вращательным движением, содержащих подшипники. Новый набор данных сигналов, полученный трехосевыми датчиками вибрации и использованный для модификации существующего классификатора неисправностей, содержал набор данных для обучения и проверки, состоящий из 256 наборов сигналов, из которых только 20 наборов сигналов были связаны с неисправными состояниями станка, а именно износом подшипника. Как описано выше, существующий классификатор неисправностей был модифицирован на основе этого очень небольшого набора сигналов.
Затем модифицированный классификатор неисправностей для проверки его производительности был применен к тестовому набору, состоящему из 7149 наборов сигналов, из которых 486 наборов сигналов были связаны с неисправными состояниями станков, для обнаружения неисправностей, причем сигналы были получены трехосевыми датчиками вибрации от станков с вращательным движением, содержащих подшипники (линия 502). Для сравнения, полностью новый классификатор был обучен «с нуля» с помощью тех же 256 наборов сигналов и применен к тому же тестовому набору, состоящему из 7149 наборов сигналов. (линия 504). Для полноты сравнения исходный существующий классификатор в его немодифицированном виде также был применен к примерному набору данных, состоящему из 7149 наборов сигналов (линия 506). Как видно из рассмотрения фиг. 5A, производительность модифицированного классификатора при идентификации неисправностей является наилучшей, несмотря на чрезвычайно малый набор предоставленных данных. Показатели, перечисленные на фиг. 5A, являются средними показателями точности, хотя можно использовать и другие примерные показатели.
На фиг. 5B показан пример производительности модифицированного классификатора в соответствии с настоящим изобретением в виде кривой «полнота-точность» (precision-recall). В этом примере классификатор неисправностей изначально был обучен и проверен на наборе данных, содержащем более 100 000 помеченных наборов сигналов, из которых 7 000 наборов сигналов указывали на неисправности станка, полученные от станков с вращательным движением, содержащих подшипники, посредством одноосевых датчиков вибрации. После обучения классификатор неисправностей был протестирован на наборе данных, содержащем 20 000 наборов сигналов, 1400 из которых соответствовали неисправностям станка. Обученный таким образом классификатор неисправностей можно назвать существующим классификатором неисправностей.
Затем существующий классификатор был модифицирован в соответствии с предпочтительным вариантом осуществления настоящего изобретения с обеспечением возможности классификации неисправностей на основе сигналов, получаемых трехосевыми датчиками вибрации от станков с вращательным движением, содержащих подшипники. Новый набор данных сигналов, полученный трехосевыми датчиками вибрации и использованный для модификации существующего классификатора неисправностей, содержал 924 набора сигналов, из которых только 70 наборов сигналов были связаны с неисправными состояниями станков, а именно с износом подшипника. Как описано выше, существующий классификатор неисправностей был модифицирован на основе этого очень небольшого набора сигналов. Затем модифицированный классификатор неисправностей для проверки его производительности был применен к набору, состоящему из 6841 набора сигналов и содержащему 436 наборов сигналов, соответствующих неисправностям станков, для обнаружения неисправностей, причем сигналы были получены трехосевыми датчиками вибрации от станков с вращательным движением, содержащих подшипники (линия 510). Для сравнения, полностью новый классификатор был обучен «с нуля» с помощью тех же 924 наборов сигналов, а также применен к 6841 примерным наборам данных (линия 512). Для полноты сравнения исходный существующий классификатор в его немодифицированном виде был также применен к 6841 примерным наборам данных (линия 514). Как видно из рассмотрения фиг. 5B, производительность модифицированного классификатора при идентификации неисправностей является наилучшей, несмотря на небольшой набор предоставленных данных. Показатели, перечисленные на фиг. 5B, являются средними показателями точности, хотя можно использовать и другие примерные показатели.
На фиг. 5C показан пример производительности модифицированного классификатора в соответствии с настоящим изобретением в виде кривой «полнота-точность» (precision-recall). В этом примере классификатор неисправностей изначально был обучен и проверен на наборе данных, содержащем более 100 000 помеченных наборов сигналов, из которых 7 000 наборов сигналов указывали на неисправности станка, полученные от станков с вращательным движением, содержащих подшипники, посредством одноосевых датчиков вибрации. После обучения классификатор неисправностей был протестирован на наборе данных, содержащем 20 000 наборов сигналов, 1400 из которых соответствовали неисправностям станка. Обученный таким образом классификатор неисправностей можно назвать существующим классификатором неисправностей.
Затем существующий классификатор был модифицирован с обеспечением возможности классификации неисправностей на основе сигналов, получаемых трехосевыми датчиками вибрации от станков с вращательным движением, содержащих подшипники. Новый набор данных сигналов, полученный трехосевыми датчиками вибрации и использованный для модификации существующего классификатора неисправностей, содержал 5924 набора сигналов, из которых только 350 наборов сигналов были связаны с неисправными состояниями станков, а именно с износом подшипника. Как описано выше, существующий классификатор неисправностей был модифицирован на основе этого небольшого набора сигналов. Затем модифицированный классификатор неисправностей для проверки его производительности был применен к набору, состоящему из 1481 примерных наборов сигналов и содержащему 156 наборов сигналов, соответствующих неисправностям станков, для обнаружения неисправностей, причем сигналы были получены трехосевыми датчиками вибрации от станков с вращательным движением, содержащих подшипники (линия 520). Для сравнения, полностью новый классификатор был обучен с помощью тех же 5924 наборов сигналов, а также применен к 1481 примерным наборам данных (линия 522). Для полноты сравнения исходный существующий классификатор в его немодифицированном виде также был применен к этим 1481 примерным наборам данных (линия 524). Как видно из рассмотрения рис. 5C, производительность модифицированного классификатора при идентификации неисправностей является наилучшей. Показатели, перечисленные на фиг. 5C, являются средними показателями точности, хотя можно использовать и другие примерные показатели.
На фиг. 5D показан пример производительности модифицированного классификатора в соответствии с настоящим изобретением в виде кривой «полнота-точность» (precision-recall). В этом примере классификатор неисправностей был обучен и проверен на наборе данных, содержащем более 100 000 помеченных наборов сигналов, из которых 7 000 наборов сигналов указывали на неисправности станка, полученные от электрических двигателей, содержащих подшипники, посредством одноосевых датчиков вибрации. После обучения классификатор неисправностей был протестирован на наборе данных, содержащем 20 000 наборов сигналов, 1400 из которых соответствовали неисправностям станка. Обученный таким образом классификатор неисправностей можно назвать существующим классификатором неисправностей.
Существующий классификатор был модифицирован с обеспечением возможности классификации неисправностей на основе сигналов магнитного потока, получаемых магнитными датчиками от электрических двигателей, содержащих подшипники. Новый набор данных сигналов, полученный магнитными датчиками и использованный для модификации существующего классификатора неисправностей, содержал 3411 наборов сигналов, из которых только 222 набора сигналов были связаны с неисправными состояниями станков, а именно с износом подшипника. Как описано выше, существующий классификатор неисправностей был модифицирован на основе этого небольшого набора сигналов. Затем существующий классификатор неисправностей для проверки его производительности был применен к тестовому набору, состоящему из 754 сигналов и содержащему только 50 примерных наборов сигналов, соответствующих неисправностям станков, для обнаружения неисправностей, причем сигналы были получены магнитными датчиками от электрических двигателей, содержащих подшипники (линия 530). Для сравнения, полностью новый классификатор был обучен с помощью тех же 3411 наборов магнитных сигналов, а также применен к тем же 754 примерным наборам магнитных данных (линия 532). Для полноты сравнения исходный существующий классификатор в его немодифицированном виде также был применен к тем же 754 примерным наборам магнитных данных (линия 534). Как видно из рассмотрения рис. 5D, производительность модифицированного классификатора при идентификации неисправностей является наилучшей. Показатели, перечисленные на фиг. 5D, являются средними показателями точности, хотя можно использовать и другие примерные показатели.
В приведенных выше примерах на фиг. 5A-5D, набор данных, на основе которого первоначально обучался классификатор 114, состоял из данных, воспринятых более чем от 40 000 отдельных станков с вращательным движением, содержащих главным образом двигатели, насосы, вентиляторы, редукторы, охладители и компрессоры. Записи о подшипниках, некоторые из которых измерялись более одного раза, велись в течение трех лет. Каждый подшипник измерялся по трем осям посредством одноосевого пьезоэлектрического датчика вибрации. В случае, если новый набор данных содержал данные от трехосевого датчика вибрации, это был трехосевой датчик вибрации MEMS.
Как видно из приведенных выше данных, доля неисправностей в наборе данных составила приблизительно 7%. Классификатор был разработан с возможностью обнаружения неисправности одного подшипника, так что даже в тех случаях, когда дополнительные исправные подшипники станка давали сигналы, свидетельствующие об износе подшипников, вследствие близости исправных подшипников к неисправным подшипникам и вследствие распространения акустической волны между этими подшипниками, классификатор был выполнен с возможностью правильной классификации исправных подшипников как таковых. Метки данных были выполнены более 10 экспертами-людьми.
Теперь обратимся к фиг. 6, где показана упрощенная блок-схема, иллюстрирующая этапы способа идентификации неисправности механического станка на основе переноса обучения в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 6 показан способ 600 идентификации неисправности станка. Как видно, на первом этапе 602 посредством первого множества датчиков могут получать первый набор сигналов, исходящих от множества механических станков. Датчики из первого множества датчиков предпочтительно относятся к первому взаимно одинаковому типу. Альтернативно, датчики из первого множества датчиков могут относиться к множеству типов. Датчики из первого множества датчиков могут иметь в целом одинаковую частотную характеристику датчика, которую можно назвать первым распределением частотной характеристики датчика.
Как видно, на втором этапе 604 необязательно могут получать первый набор данных о рабочем состоянии станка, соответствующий первому набору сигналов, получаемых на этапе 602. Данные о рабочем состоянии станка могут содержать идентификацию рабочего состояния, связанного с каждым набором сигналов из первого набора сигналов. Рабочее состояние может быть неисправным или исправным.
Как видно, на третьем этапе 606 на существующий классификатор неисправностей, предварительно обученный для выявления неисправностей в станках на основе сигналов, исходящих от станков и полученных вторым множеством датчиков, подают указанные наборы сигналов и необязательные соответствующие данные о рабочем состоянии. Второе множество датчиков, на основе которых был обучен существующий классификатор неисправностей, могут относиться к взаимно одинаковому типу, но различному от типа первого множества датчиков. Альтернативно, второе множество датчиков, на основе которых был обучен существующий классификатор неисправностей, может относиться к множеству типов, по меньшей мере некоторые из которых различаются от первого множества датчиков. Датчики из второго множества датчиков могут иметь в целом одинаковую частотную характеристику датчика, которую можно назвать вторым распределением частотной характеристики датчика. Второе распределение частотной характеристики датчика может различаться от первого распределения частотной характеристики датчика первого множества датчиков.
Как видно, на четвертом этапе 608 существующий классификатор неисправностей предпочтительно модифицируют с использованием подхода переноса обучения и на основе подаваемых на него новых данных. Модификация может включать добавление к существующему классификатору неисправностей по меньшей мере одного слоя соответствия, причем этот слой соответствия может обучаться разности частотных характеристик между первым распределением частотных характеристик датчика и вторым распределением частотных характеристик датчика.
Как видно, на пятом этапе 610 впоследствии могут получать дополнительный набор сигналов по меньшей мере от одного станка датчиком того же типа, что и первое множество датчиков.
Как видно, на шестом этапе 612 для идентификации неисправностей в станках, посредством которых был сгенерирован дополнительный набор сигналов, к этому дополнительному набору сигналов могут применять модифицированный классификатор, созданный на этапе 608.
Как видно, на седьмом этапе 614, на основе идентифицированных неисправностей могут выполнять техническое обслуживание или ремонт станка.
Следует понимать, что все различные станки, описанные как генерирующие сигналы на этапах 602, 606 и 610, могут представлять собой одинаковые или различные станки, имеющие общую характеристику, как описано выше.
Специалистам в данной области следует понимать, что настоящее изобретение не ограничено тем, что было конкретно показано и описано выше. Объем настоящего изобретения включает в себя как комбинации, так и подкомбинации различных признаков, описанных выше, а также их модификации, все из которых не относятся к известному уровню техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖЕНИЕ НАСТУПЛЕНИЯ СОНЛИВОСТИ | 2016 |
|
RU2734339C2 |
| АНАЛИЗАТОР МОЛОКА ДЛЯ КЛАССИФИКАЦИИ МОЛОКА | 2019 |
|
RU2794708C2 |
| РЕАЛИЗУЕМЫЙ КОМПЬЮТЕРОМ СПОСОБ ОБУЧЕНИЯ МОДЕЛИ МАШИННОГО ОБУЧЕНИЯ ОБНАРУЖЕНИЮ ОШИБОК УСТАНОВКИ В ЛИФТЕ, В ЧАСТНОСТИ, В ДВЕРИ ЛИФТА, РЕАЛИЗУЕМЫЙ КОМПЬЮТЕРОМ СПОСОБ КЛАССИФИКАЦИИ ОШИБОК УСТАНОВКИ И СИСТЕМА | 2022 |
|
RU2811784C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТИПА ЦИФРОВОГО ДОКУМЕНТА | 2016 |
|
RU2635259C1 |
| Способ и система перевода исходного предложения на первом языке целевым предложением на втором языке | 2017 |
|
RU2692049C1 |
| СИСТЕМА ДЛЯ ВЕРИФИКАЦИИ ГОВОРЯЩЕГО | 1996 |
|
RU2161336C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ И СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ РЕЖИМОВ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ ИЗУЧЕННЫХ ПРЕДПОЧТЕНИЙ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2683902C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТЕКСТОВОГО ПРЕДСТАВЛЕНИЯ ФРАГМЕНТА УСТНОЙ РЕЧИ ПОЛЬЗОВАТЕЛЯ | 2019 |
|
RU2731334C1 |
| ОБУЧЕНИЕ DNN-СТУДЕНТА ПОСРЕДСТВОМ РАСПРЕДЕЛЕНИЯ ВЫВОДА | 2014 |
|
RU2666631C2 |
| КЛАССИФИКАЦИЯ ДАННЫХ ВЫБОРОК | 2009 |
|
RU2517286C2 |
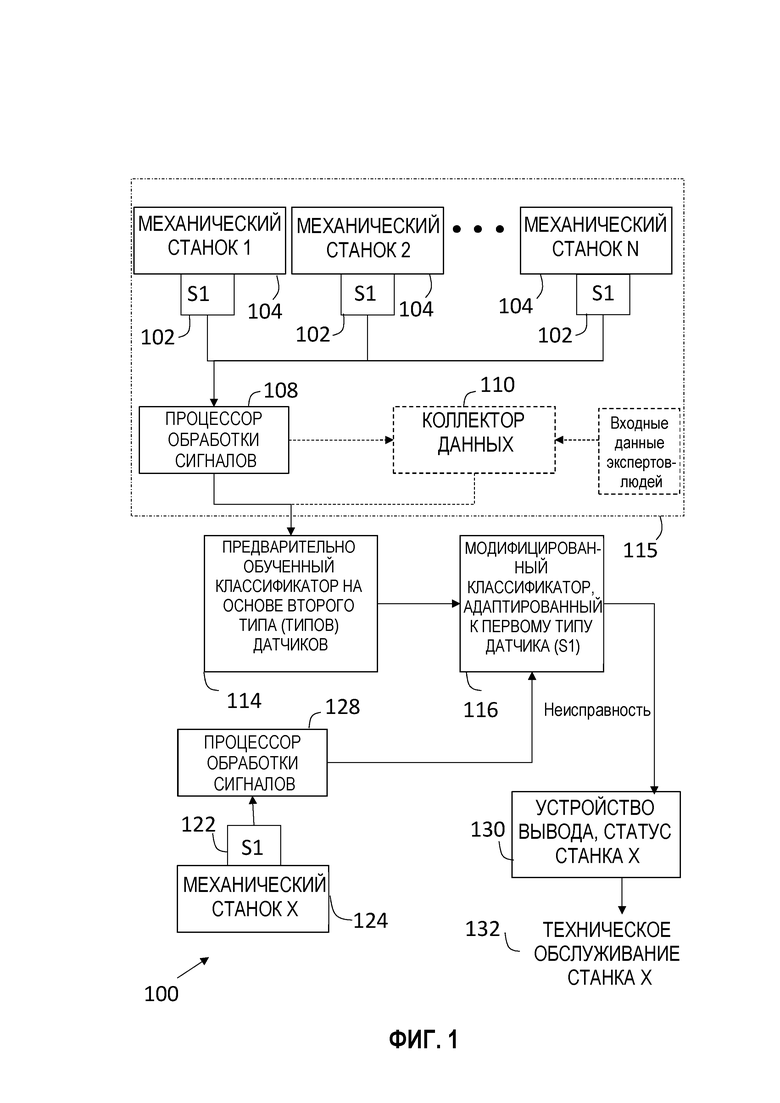
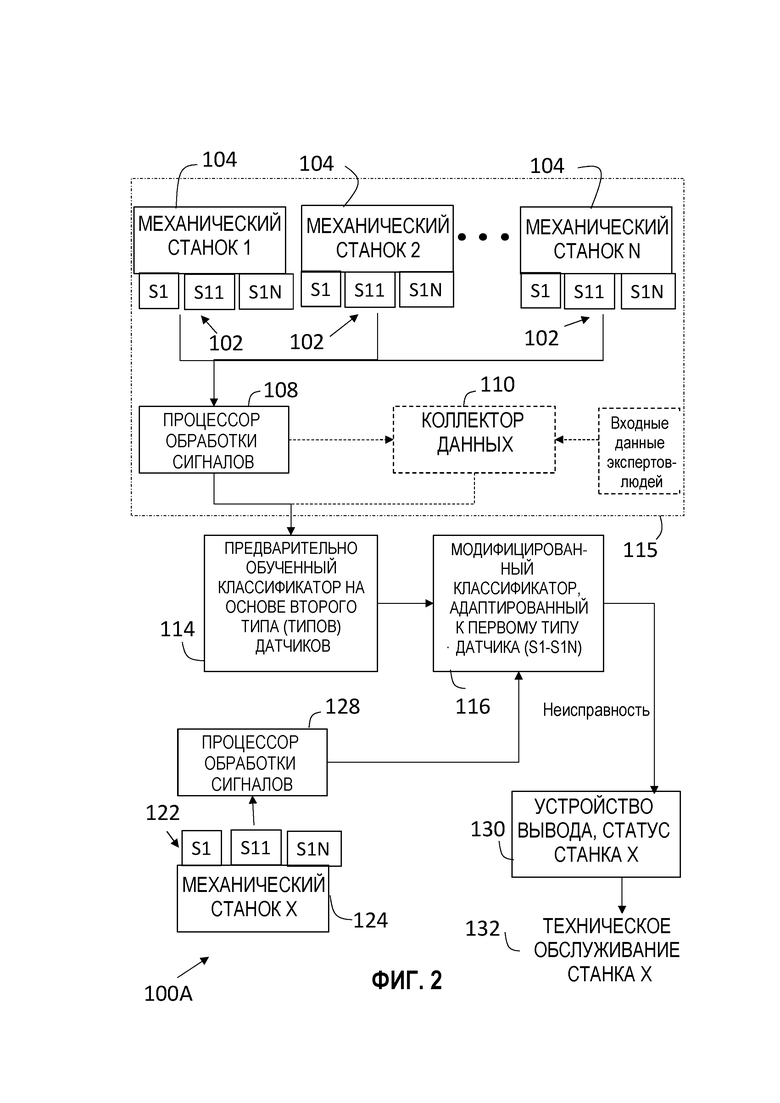
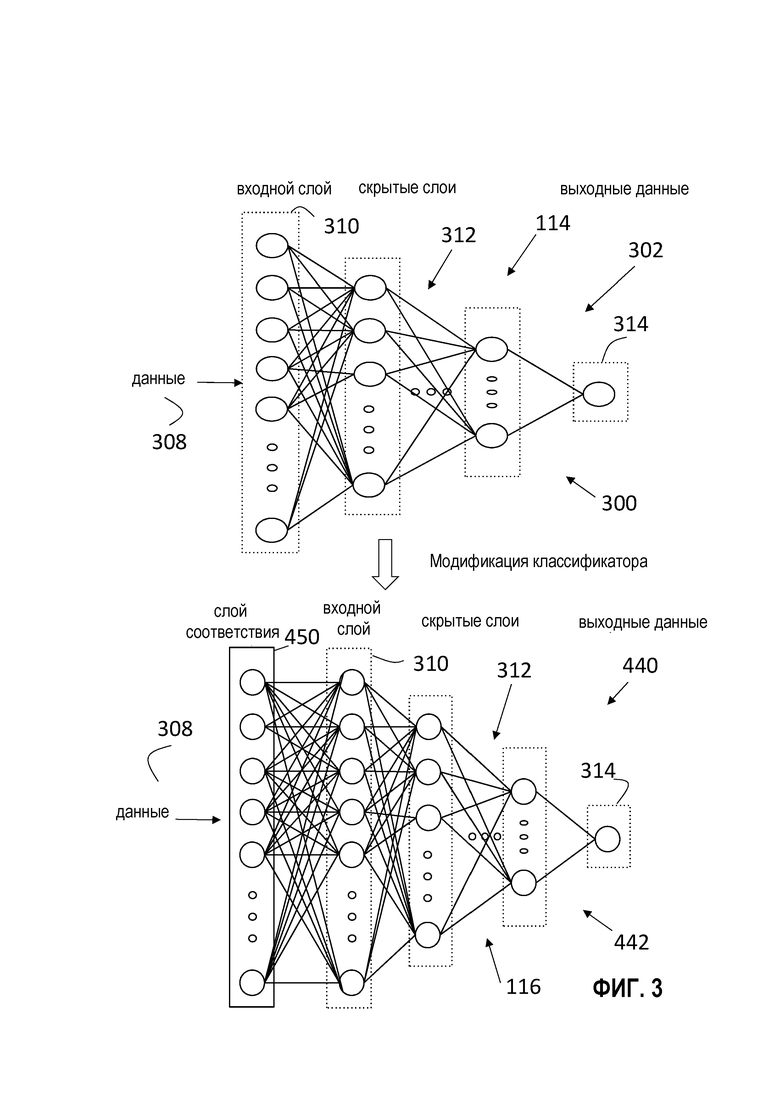
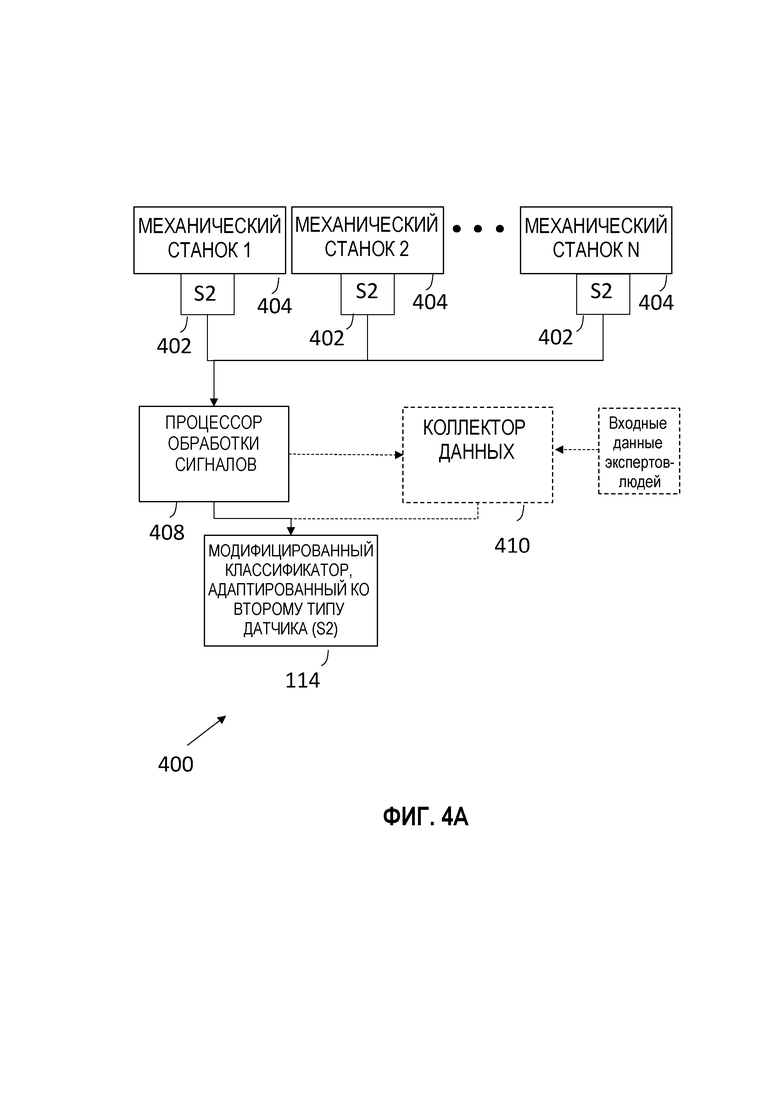
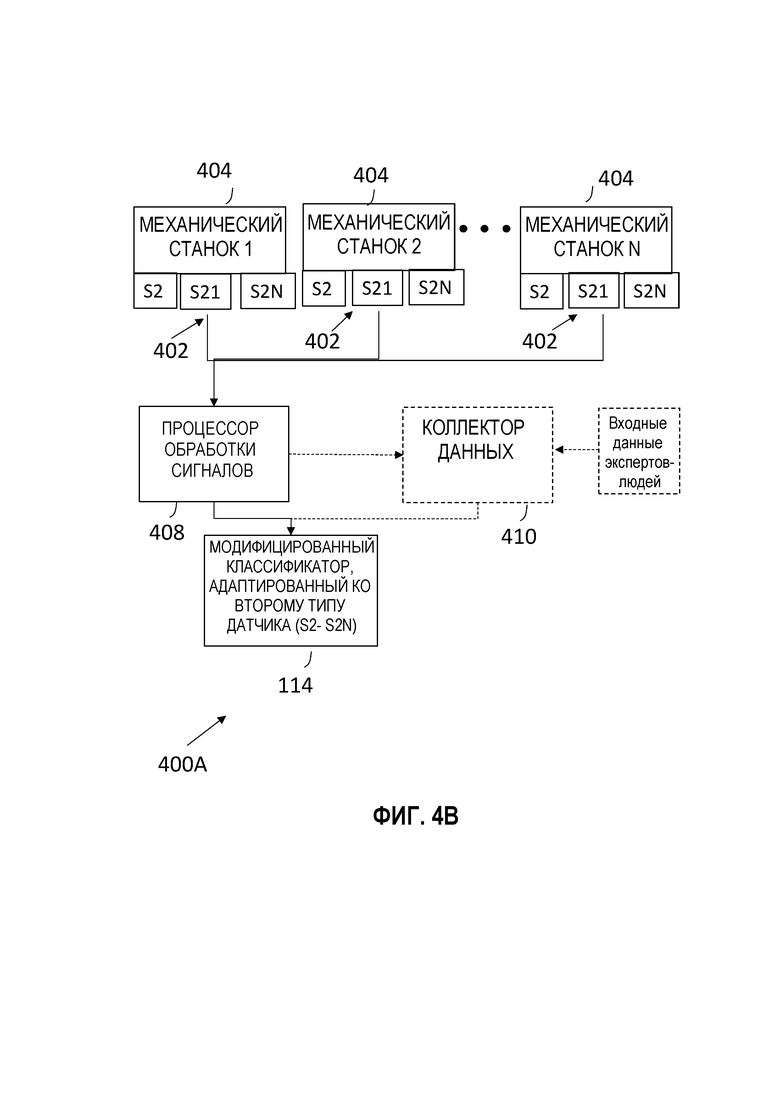
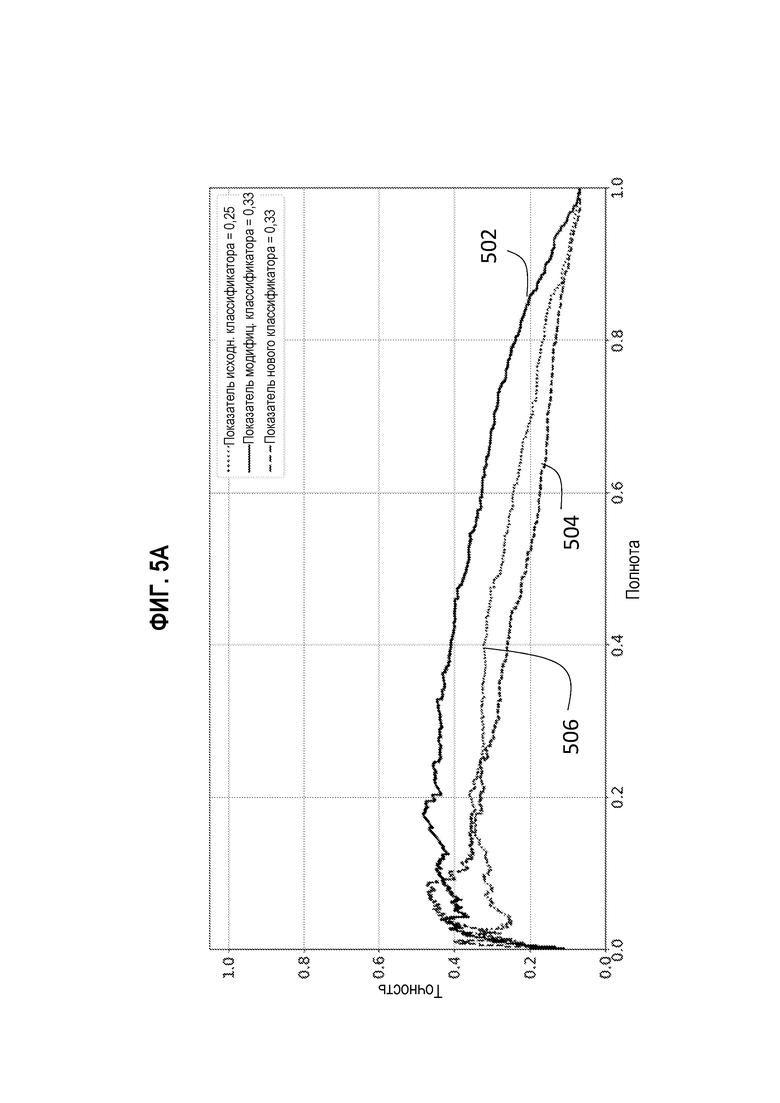
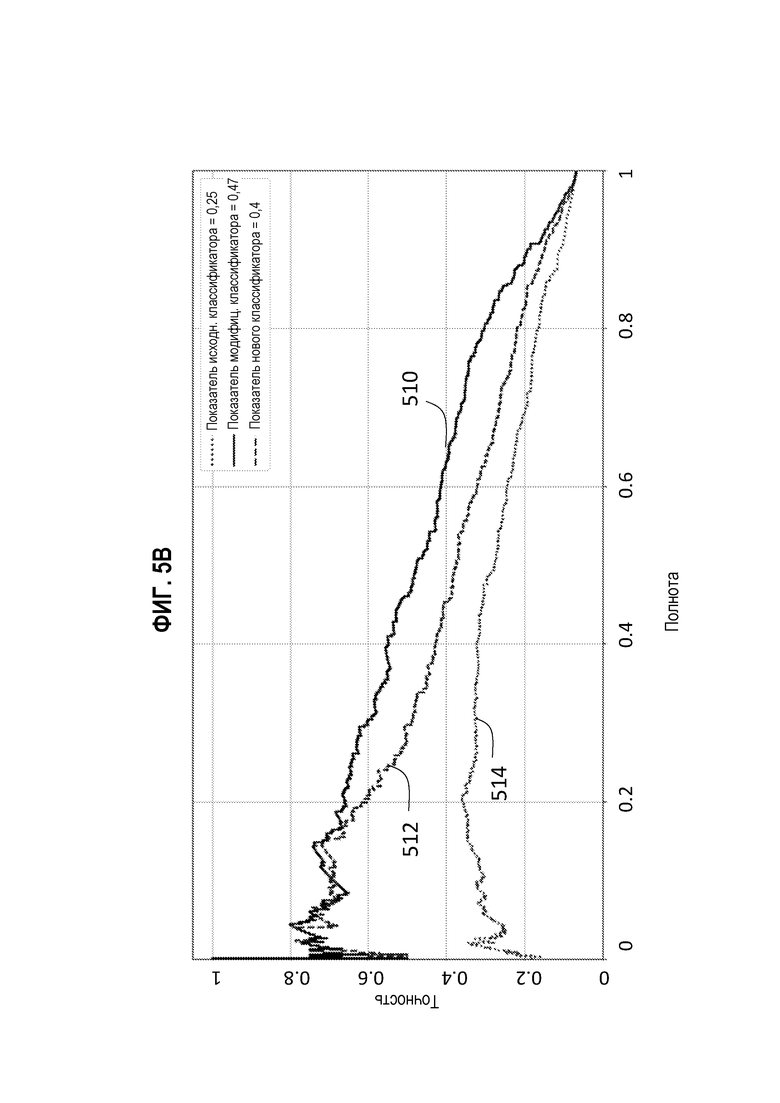
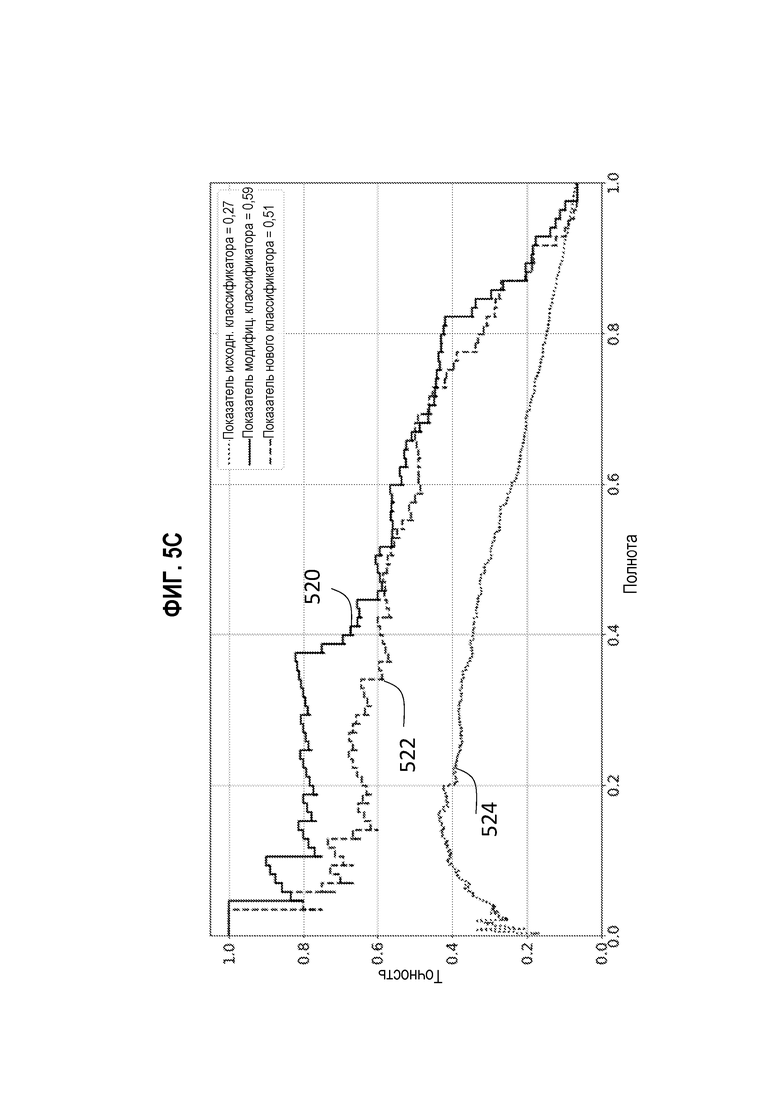
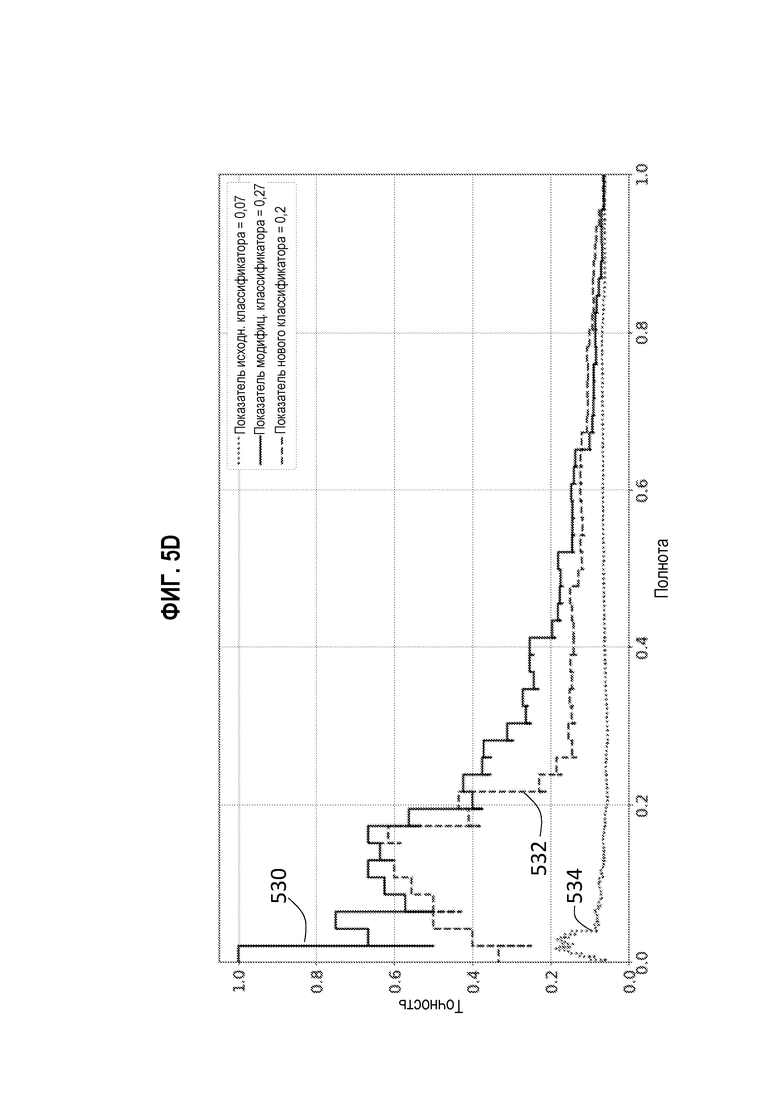
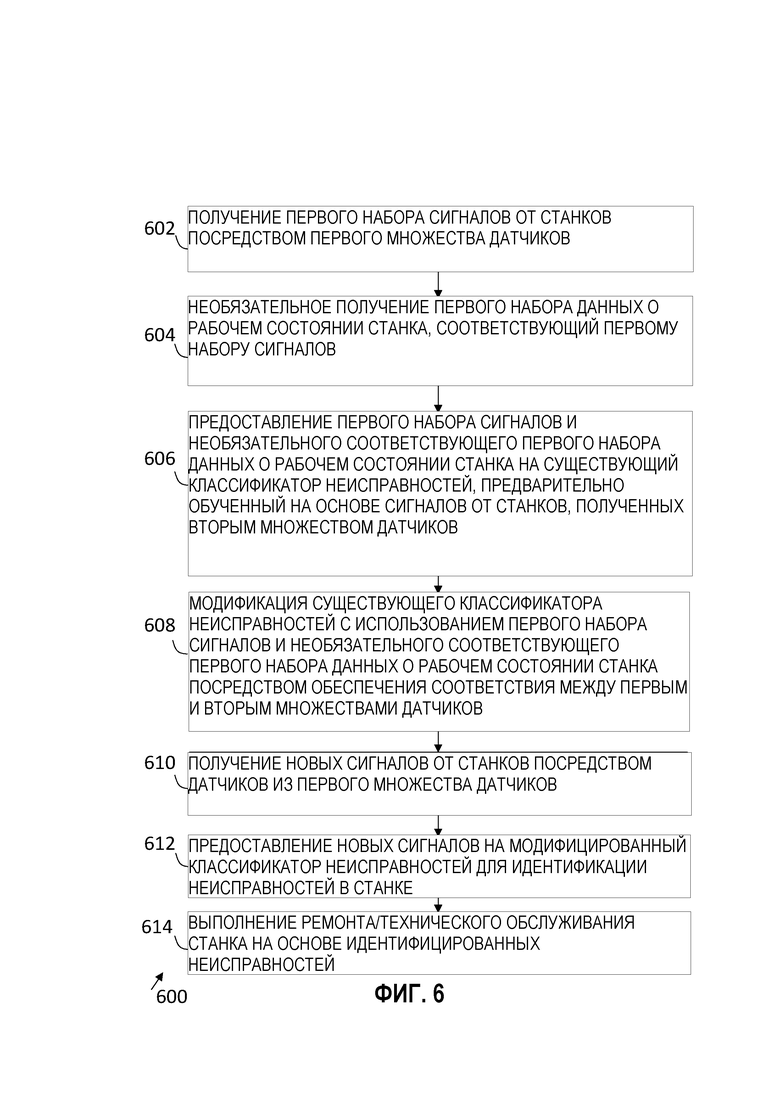
Настоящая группа изобретений относится к отслеживанию механических станков, в частности к идентификации неисправностей механических станков посредством их отслеживания. Способ идентификации неисправности по меньшей мере одного механического станка включает обеспечение получения первым множеством датчиков, соединенных с соответствующим первым множеством механических станков, первого множества наборов сигналов, исходящих от первого множества механических станков, причем первое множество механических станков имеет, по меньшей мере, одну общую характеристику, подачу, по меньшей мере, первого множества наборов сигналов первого множества механических станков на существующий классификатор неисправностей, предварительно обученный с возможностью автоматической идентификации неисправностей второго множества механических станков на основе сигналов, исходящих от них и предварительно полученных вторым множеством датчиков, причем второе множество датчиков относится к различному типу, чем первое множество датчиков, второе множество механических станков имеет указанную, по меньшей мере, одну общую характеристику, модификацию указанного существующего классификатора неисправностей посредством использования переноса обучения на основе, по меньшей мере, первого множества наборов сигналов первого множества механических станков, тем самым обеспечивая модифицированный классификатор неисправностей, применение модифицированного классификатора неисправностей, по меньшей мере, к одному дополнительному набору сигналов, получаемых, по меньшей мере, одним датчиком из первого множества датчиков и исходящих по меньшей мере от одного заданного механического станка, имеющего указанную по меньшей мере одну общую характеристику, причем модифицированный классификатор неисправностей выполнен с возможностью автоматической идентификации, по меньшей мере, одной неисправности, по меньшей мере, одного заданного механического станка на основе указанного, по меньшей мере, одного дополнительного набора сигналов, и предоставление воспринимаемых человеком выходных данных с помощью устройства вывода, содержащих по меньшей мере идентификацию неисправности указанного по меньшей мере одного заданного механического станка, по меньшей мере одной операции по ремонту или техническому обслуживанию, выполняемой на основе воспринимаемых человеком выходных данных. Технический результат - решение проблемы ограниченного использования классификатора неисправностей, обученного на данных, полученных от датчиков определенного типа или типов, для классификации сигналов, получаемых от датчиков различного типа или типов, вследствие различий в характеристиках датчиков, обеспечение возможности переноса обучения для соответствия между исходным типом датчика, на основе которого был обучен существующий классификатор, и новым различным типом датчиков, от которых получают новые данные, требующие классификации. 2 н. и 22 з.п. ф-лы, 11 ил.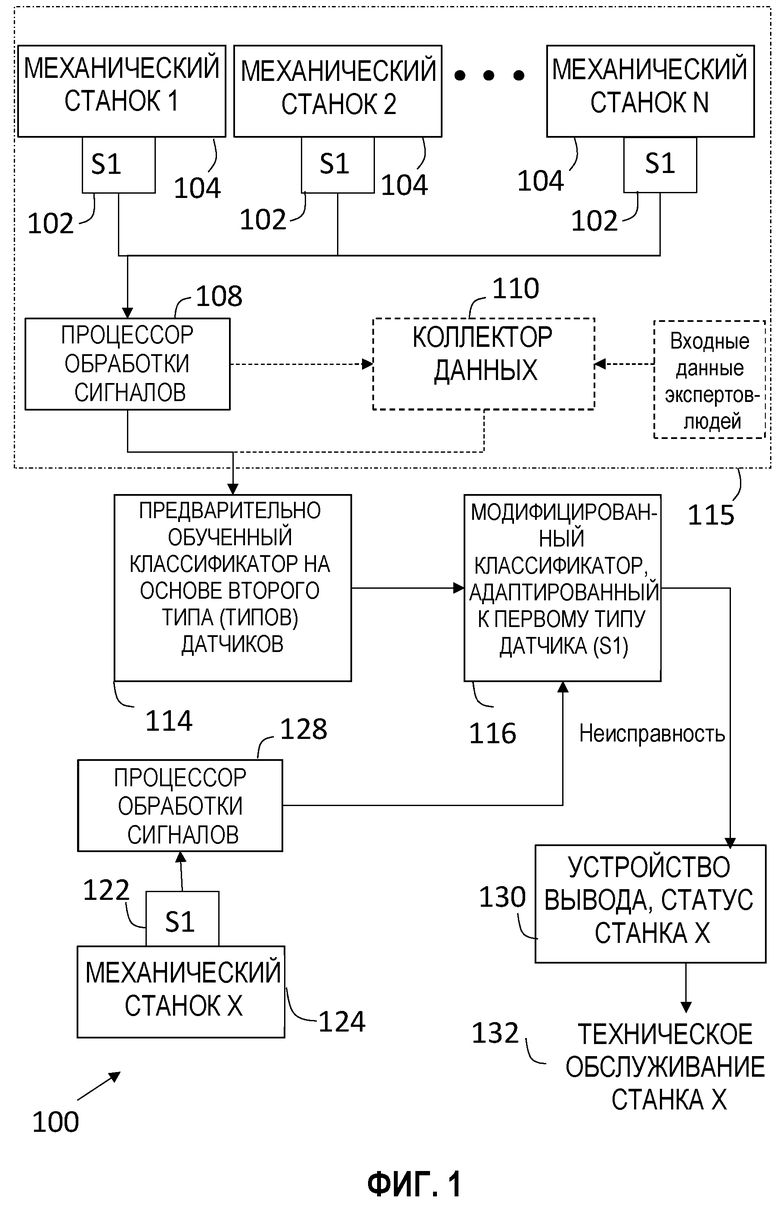
1. Способ идентификации неисправности по меньшей мере одного механического станка, включающий:
обеспечение получения первым множеством датчиков, соединенных с соответствующим первым множеством механических станков, первого множества наборов сигналов, исходящих от первого множества механических станков, причем первое множество механических станков имеет по меньшей мере одну общую характеристику;
подачу по меньшей мере первого множества наборов сигналов первого множества механических станков на существующий классификатор неисправностей, предварительно обученный с возможностью автоматической идентификации неисправностей второго множества механических станков на основе сигналов, исходящих от них и предварительно полученных вторым множеством датчиков, причем второе множество датчиков относится к другому типу, чем первое множество датчиков, второе множество механических станков имеет указанную по меньшей мере одну общую характеристику;
модификацию указанного существующего классификатора неисправностей посредством использования переноса обучения на основе по меньшей мере первого множества наборов сигналов первого множества механических станков, тем самым обеспечивая модифицированный классификатор неисправностей;
применение модифицированного классификатора неисправностей по меньшей мере к одному дополнительному набору сигналов, получаемых по меньшей мере одним датчиком из первого множества датчиков и исходящих по меньшей мере от одного заданного механического станка, имеющего указанную по меньшей мере одну общую характеристику, причем модифицированный классификатор неисправностей выполнен с возможностью автоматической идентификации по меньшей мере одной неисправности указанного по меньшей мере одного заданного механического станка на основе указанного по меньшей мере одного дополнительного набора сигналов; и
предоставление воспринимаемых человеком выходных данных с помощью устройства вывода, содержащих по меньшей мере идентификацию указанной неисправности указанного по меньшей мере одного заданного механического станка, по меньшей мере одной операции по ремонту или техническому обслуживанию, выполняемой на основе указанных воспринимаемых человеком выходных данных.
2. Способ по п. 1, дополнительно включающий после указанного обеспечения получения первым множеством датчиков первого множества наборов сигналов и до указанной подачи первого множества наборов сигналов на существующий классификатор неисправностей:
получение первого множества наборов данных о рабочем состоянии для механических станков из первого множества механических станков, причем каждый набор данных о рабочем состоянии указывает на рабочее состояние механического станка из первого множества механических станков, каждое рабочее состояние связано по меньшей мере с одним из указанных наборов сигналов;
указанная подача по меньшей мере первого множества наборов сигналов на существующий классификатор неисправностей также включает подачу указанных данных о рабочем состоянии первого множества механических станков на существующий классификатор неисправностей;
указанная модификация существующего классификатора неисправностей посредством применения переноса обучения на основе по меньшей мере первого множества наборов сигналов также включает модификацию существующего классификатора неисправностей посредством применения переноса обучения дополнительно на основе первого множества наборов данных о рабочем состоянии первого множества механических станков.
3. Способ по п. 1 или 2, отличающийся тем, что указанная идентификация неисправности включает идентификацию конкретной неисправности указанного по меньшей мере одного заданного механического станка и прогнозирование отказа указанного по меньшей мере одного заданного механического станка вследствие указанной конкретной неисправности при отсутствии выполнения рекомендованной операции по его техническому обслуживанию, такой что указанный по меньшей мере один заданный механический станок действительно выйдет из строя при отсутствии выполнения указанной рекомендованной операции по техническому обслуживанию.
4. Способ по п. 2 или 3, в котором указанный существующий классификатор неисправностей содержит нейронную сеть, а модификация существующего классификатора неисправностей включает добавление в нейронную сеть по меньшей мере одного слоя соответствия, причем помимо добавления указанного по меньшей мере одного слоя соответствия, нейронная сеть в остальном является немодифицированной посредством указанной модификации.
5. Способ по п. 4, в котором указанная нейронная сеть, содержащая существующий классификатор неисправностей, содержит слой данных и входной слой для приема данных от слоя данных, причем указанный по меньшей мере один слой соответствия добавляют между слоем данных и входным слоем, а указанный по меньшей мере один слой соответствия выполнен с возможностью приема данных от слоя данных в модифицированном классификаторе неисправностей.
6. Способ по п. 4 или 5, в котором первое множество датчиков имеет первое распределение частотной характеристики, а второе множество датчиков имеет второе распределение частотной характеристики, причем слой соответствия выполнен с возможностью осуществления соответствия между первым и вторым распределениями частотной характеристики.
7. Способ по любому из предшествующих пунктов, в котором первое множество датчиков выполнено с возможностью восприятия одинакового типа сигнала, что и второе множество датчиков.
8. Способ по п. 7, в котором указанный одинаковый тип сигнала содержит один из сигнала вибрации, сигнала магнитного потока, сигнала тока, температуры и внутреннего давления станка.
9. Способ по любому из пп. 1-6, в котором первое множество датчиков и второе множество датчиков выполнены с возможностью восприятия взаимно различных типов сигналов.
10. Способ по п. 9, отличающийся тем, что указанные взаимно различные типы сигналов содержат по меньшей мере один из:
сигналов вибрации и магнитного потока;
сигналов вибрации и электрического тока;
сигналов вибрации и температуры;
сигналов электрического тока и магнитного потока; и
сигналов вибрации и внутреннего давления станка.
11. Способ по любому из пп. 2-10, в котором по меньшей мере некоторые из указанных рабочих состояний механического станка из первого множества механических станков, как указано посредством первого множества наборов данных о рабочем состоянии, представляют собой неисправные рабочие состояния.
12. Способ по п. 11, в котором указанные первое множество наборов сигналов и первое множество наборов данных о рабочем состоянии первого множества механических станков содержат менее 30 неисправных рабочих состояний.
13. Система для идентификации неисправности по меньшей мере одного механического станка, содержащая:
первое множество датчиков, соединенных с соответствующим первым множеством механических станков и выполненных с возможностью получения первого множества наборов сигналов, исходящих от первого множества механических станков, причем первое множество механических станков имеет по меньшей мере одну общую характеристику;
блок обработки данных, выполненный с возможностью:
приема первого множества наборов сигналов первого множества механических станков, причем блок обработки данных содержит существующий классификатор неисправностей, предварительно обученный с возможностью автоматической классификации рабочих состояний второго множества механических станков на основе сигналов, исходящих от них и предварительно полученных вторым множеством датчиков, причем второе множество датчиков относится к другому типу, чем первое множество датчиков, второе множество механических станков имеет указанную по меньшей мере одну общую характеристику;
модификации указанного существующего классификатора неисправностей посредством использования переноса обучения на основе по меньшей мере первого множества наборов сигналов первого множества механических станков, тем самым обеспечивая модифицированный классификатор неисправностей, и
применения модифицированного классификатора неисправностей по меньшей мере к одному дополнительному набору сигналов, получаемых по меньшей мере одним датчиком из первого множества датчиков и исходящих по меньшей мере от одного заданного механического станка, имеющего указанную по меньшей мере одну общую характеристику, причем модифицированный классификатор неисправностей выполнен с возможностью автоматической идентификации по меньшей мере одной неисправности указанного по меньшей мере одного заданного механического станка на основе указанного по меньшей мере одного дополнительного набора сигналов, и
устройство вывода, находящееся в связи с указанным блоком обработки данных и выполненное с возможностью предоставления воспринимаемых человеком выходных данных, содержащих по меньшей мере идентификацию указанной неисправности указанного по меньшей мере одного заданного механического станка, по меньшей мере одной операции по ремонту или техническому обслуживанию, выполняемой на основе указанных воспринимаемых человеком выходных данных.
14. Система по п. 13, дополнительно содержащая блок сбора данных, выполненный с возможностью получения первого множества наборов данных о рабочем состоянии для механических станков из первого множества механических станков, причем каждый набор данных о рабочем состоянии указывает на рабочее состояние механического станка из первого множества механических станков, каждое рабочее состояние связано по меньшей мере с одним из указанных наборов сигналов;
указанный блок обработки данных выполнен с возможностью приема данных о рабочем состоянии первого множества механических станков и с возможностью дополнительной модификации указанного существующего классификатора неисправностей на основе первого множества наборов данных о рабочем состоянии первого множества механических станков.
15. Система по п. 13 или 14, в которой указанная идентификация указанной неисправности включает идентификацию конкретной неисправности указанного по меньшей мере одного заданного механического станка и прогнозирование отказа указанного по меньшей мере одного заданного механического станка вследствие указанной конкретной неисправности при отсутствии выполнения рекомендованной операции по его техническому обслуживанию, такой что указанный по меньшей мере один заданный механический станок действительно выйдет из строя при отсутствии выполнения указанной рекомендованной операции по техническому обслуживанию.
16. Система по п. 14 или 15, в которой указанный существующий классификатор неисправностей содержит нейронную сеть, а модификация существующего классификатора неисправностей включает добавление в нейронную сеть по меньшей мере одного слоя соответствия, причем помимо добавления указанного по меньшей мере одного слоя соответствия, нейронная сеть в остальном является немодифицированной посредством указанной модификации.
17. Система по п. 16, в которой нейронная сеть, содержащая существующий классификатор неисправностей, содержит слой данных и входной слой для приема данных от слоя данных, причем указанный по меньшей мере один слой соответствия добавляют между слоем данных и входным слоем, а указанный по меньшей мере один слой соответствия выполнен с возможностью приема данных от слоя данных в модифицированном классификаторе неисправностей.
18. Система по п. 16 или 17, в которой первое множество датчиков имеет первое распределение частотной характеристики, а второе множество датчиков имеет второе распределение частотной характеристики, причем слой соответствия выполнен с возможностью осуществления соответствия между первым и вторым распределениями частотной характеристики.
19. Система по любому из пп. 13-18, в которой первое множество датчиков выполнено с возможностью восприятия одинакового типа сигнала, что и второе множество датчиков.
20. Система по п. 19, в которой указанный одинаковый тип сигнала содержит один из сигнала вибрации, сигнала магнитного потока, сигнала тока, температуры и внутреннего давления станка.
21. Система по любому из пп. 13-18, отличающаяся тем, что указанное первое множество датчиков и указанное второе множество датчиков выполнены с возможностью восприятия взаимно различных типов сигналов.
22. Система по п. 21, отличающаяся тем, что указанные взаимно различные типы сигналов содержат по меньшей мере один из:
сигналов вибрации и магнитного потока;
сигналов вибрации и электрического тока;
сигналов вибрации и температуры;
сигналов электрического тока и магнитного потока; и
сигналов вибрации и внутреннего давления станка.
23. Система по любому из пп. 14-22, в которой по меньшей мере некоторые из указанных рабочих состояний механического станка из первого множества механических станков, как указано посредством первого множества наборов данных о рабочем состоянии, представляют собой неисправные рабочие состояния.
24. Система по п. 23, в которой указанные первое множество наборов сигналов и первое множество наборов данных о рабочем состоянии первого множества механических станков содержат менее 30 неисправных рабочих состояний.
| СПОСОБ ОБНАРУЖЕНИЯ НЕИСПРАВНОСТИ ДЕТАЛЕЙ НА ПРОТЯЖЕНИИ СРОКА СЛУЖБЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2565937C2 |
| ОБРАБОТКА ИНФОРМАЦИИ ДАТЧИКА | 2014 |
|
RU2622880C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ ТЕХНИЧЕСКИХ ОБЪЕКТОВ | 0 |
|
SU330456A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ И КЛАССИФИКАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2692420C2 |
| US 6243641 B1, 05.06.2001 | |||
| Абу-Абед Фарес Надимович, Допира Роман Викторович, Попов Павел Георгиевич, Кордюков Роман Юрьевич | |||
| Построение нейросетевого классификатора для снижения риска аварий при эксплуатации сложных технических систем // | |||

