Изобретение относится к области ракетной техники, в частности к устройствам для установки и пуска авиационных ракет, а именно к испытательным стендам, предназначенным для измерения усилий, возникающих при перемещении, фиксации и сходе авиационных ракет с направляющих авиационных пусковых устройств (далее - АПУ) в процессе проведения ресурсных испытаний.
Изобретение может быть использовано как средство контроля технического состояния и износа механических и электромеханических узлов АПУ для принятия решения о целесообразности их дальнейшей эксплуатации или направления в ремонт.
Известен стенд для контроля параметров схода авиационной ракеты по патенту РФ на изобретение №2511217, МПК F41F 3/04, F41F 3/06, 2012 г., содержащий пространственную раму на которой посредством самолетных узлов подвески закреплено АПУ, предназначенное для установки в ней ракеты, продольные направляющие, перемещающуюся по направляющим каретку, два хомута, предназначенные для размещения в них ракеты, закрепляемую на носовой части ракеты опору, привод продольного перемещения ракеты, выполненный в виде закрепленного внизу пространственной рамы силового цилиндра с гибкой тягой, один конец которой через тензодатчик связан со штоком силового цилиндра, а второй конец через закрепленные на раме обводные ролики - с хвостовой частью ракеты и механизм вертикального перемещения ракеты, выполненный в виде связанной с кареткой посредством винтового механизма рамки на которой закреплены концы хомутов для размещения ракеты. Данный стенд не предназначен для проведения ресурсных испытаний АПУ в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ» с одновременным непрерывным измерением усилий, возникающих на всем пути перемещения ракеты по направляющим для схода ракет АПУ. Так в известном стенде не предусмотрена точная установка продольной оси ракеты относительно продольной оси симметрии направляющих для схода ракет, что должно обеспечивать точное позиционирование бугелей ракеты относительно приемных окон направляющих для схода ракет АПУ на всем протяжении проведения испытаний в автоматическом режиме. В указанном стенде на этапе подвески ракеты не предусмотрен механизм автоматического вертикального перемещения ракеты с одновременным вводом бугелей ракеты в приемные окна направляющих для схода ракет АПУ и установкой бугелей на направляющие АПУ. Так же в известном стенде не механизированы процессы перемещения ракеты по направляющим для схода ракет АПУ в процессе ее загрузки до момента срабатывания замкового устройства и возврата ракеты в первоначальное положение после ее схода с направляющих АПУ. Данный стенд обеспечивает замер усилий срабатывания замкового устройства АПУ при пуске ракеты и схода ракеты с направляющих АПУ. Однако с помощью данного стенда невозможно произвести замер усилий, возникающих при перемещении ракеты по направляющим АПУ в процессе ее загрузки и при срабатывании замкового устройства АПУ в момент фиксации ракеты на направляющих. Механизм продольного перемещения ракеты содержит растяжимую гибкую тягу (канат), связанную с тензодатчиком, что приводит к возникновении больших погрешностей при измерении усилий, возникающих при сходе ракеты с направляющих АПУ и срабатывании замкового устройства АПУ при пуске ракеты.
Известен стенд для многократной имитации пуска авиационной ракеты по патенту РФ на изобретение №2519596, МПК F41F 3/04, F41F 3/06, 2012 г., содержащий пространственную раму на которой посредством самолетных узлов подвески закреплено АПУ, предназначенное для установки в ней габаритно-массового макета (далее - ГММ) ракеты, закрепленные на раме продольные направляющие в которых с возможностью возвратно-поступательного перемещения посредством силового цилиндра установлена каретка со стопорным механизмом и опорно-подъемным механизмом перемещения ГММ ракеты, обеспечивающим удержание ГММ ракеты при сходе с АПУ и возврат его в исходное положение перед установкой в АПУ, тензодатчик, установленный на штоке силового цилиндра с возможностью контакта с закрепленным на каретке упором, предназначенным для взаимодействия с ГММ, при этом опорно-подъемный механизм перемещения ГММ выполнен в виде шарнирно установленных на каретке и связанных между собой продольной тягой двух вертикальных стоек с выполненными в торцах этих стоек карманами, предназначенными для расположения в них цапф ГММ ракеты, причем на одной из стоек жестко закреплен рычаг с роликом, обеспечивающим взаимодействие с установленной на раме профилированной нижней направляющей. Данный стенд предназначен для проведения ресурсных испытаний АПУ в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ» с одновременным непрерывным измерением усилий, возникающих на всем пути перемещения ракеты по направляющим для схода ракет АПУ. Однако указанный выше стенд обладает рядом существенных недостатков, которые затрудняют его использование в автоматическом режиме и снижают точность получаемых с его помощью измерений. Следует отметить, что для правильной работы стенда в автоматическом режиме и получения корректных результатов измерения усилий, возникающих в процессе перемещения ГММ по направляющим для схода ракет АПУ, необходимо, чтобы на всем протяжении перемещения ГММ по направляющим АПУ в процессе непрерывной работы стенда продольная ось ГММ всегда располагалась в одной вертикальной плоскости с продольной осью симметрии направляющих для схода ракет АПУ и параллельно ей. В противном случае ГММ будет установлен в направляющих для схода ракет АПУ с перекосом, что приведет к подклиниванию бугелей ГММ в направляющих для схода ракет АПУ и появлению дополнительных составляющих силы трения между направляющими АПУ и бугелями ГММ. В этом случае замеры, производимые в процессе перемещения ГММ по направляющим для схода ракет АПУ, будут не корректными. Однако в известном стенде не предусмотрена регулировка положения продольной оси ГММ относительно продольной оси симметрии направляющих для схода ракет АПУ после установки ГММ в опорно-подъемный механизм перемещения ГММ. Отсутствие регулировки положения продольной оси ГММ приводит к частому непопаданию бугелей ГММ в приемные окна направляющих для схода ракет АПУ во время работы стенда в автоматическом режиме или установке бугелей ГММ в направляющих для схода ракет АПУ с перекосом с указанными выше последствиями. Также следует указать, что выполнение в известном стенде опорно-подъемного механизма перемещения ГММ в виде поворотной и недостаточно жесткой шарнирно-рычажной системы приводит к невозможности точной установки ГММ на направляющие для схода ракет АПУ в процессе автоматической работы стенда и точного позиционирования ГММ в опорно-подъемном механизме после схода ГММ с направляющих АПУ перед следующим циклом работы стенда. По этой же причине происходит перекос продольной оси ГММ относительно продольной оси симметрии направляющих для схода ракет АПУ в процессе непрерывной работы стенда в замкнутом цикле, что в свою очередь приводит к увеличению усилия, прикладываемого к ГММ в процессе его перемещения по направляющим для схода ракет АПУ и снижению точности проводимых измерений. Кроме того, после захода бугелей ГММ в приемные окна направляющих для схода ракет АПУ в момент начала движения бугелей по направляющим АПУ происходит удар бугелей по кромке направляющих, что так же приводит к искажению производимых измерений. Так же следует отметить, что в данном стенде тензодатчик измерительного модуля устанавливается на штоке силового цилиндра и взаимодействует в процессе работы стенда непосредственно с кареткой. Такая схема установки тензодатчика приводит к получению не корректных измерений усилий, возникающих в процессе перемещения ГММ по направляющим для схода ракет АПУ, т.к. на замеряемое тензодатчиком усилие перемещения ГММ по направляющим для схода ракет АПУ накладывается сила сопротивления качения, возникающая в результате перемещения по соответствующим направляющим опорных роликов каретки и установленных на каретке роликов толкателя защелки стопорного механизма и задней стенки опорно-подъемного механизма ММГ. Данное техническое решение принимается за прототип.
Технической проблемой, на решение которой направлено предложенное техническое решение, является некорректное измерение на стенде усилий, возникающих на всем пути перемещения ГММ по направляющим для схода ракет АПУ, а так же усилий срабатывания замкового устройство для фиксации ракеты в АПУ в процессе ресурсных испытаний АПУ.
Достигаемым техническим результатом от использования предложенного стенда является повышение точности измерения усилий, возникающих на всем пути перемещения ГММ по направляющим для схода ракет АПУ, а так же усилий срабатывания замкового устройства для фиксации ракеты в АПУ за счет исключения влияния на результат измерения силы сопротивления качению каретки по направляющим стенда и дополнительной составляющей силы трения, возникающей в результате неправильной установки ГММ ракеты в направляющие для схода ракет АПУ в процессе ресурсных испытаний АПУ и работы стенда в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ».
Указанная выше техническая проблема решается путем использования стенда для имитации пуска авиационной ракеты, содержащего пространственную раму с жестко закрепленными на ней авиационным пусковым устройством и продольными направляющими, каретку с кронштейном и закрепленными на осях опорными роликами, предназначенными для установки в продольных направляющих, силовой привод перемещения каретки, опорно-подъемный механизм габаритно-массовой модели ракеты и тензодатчик измерительного модуля, при этом на наружных поверхностях осей опорных роликов и сопрягаемых с ними внутренних поверхностях каретки выполнены соответственно наружные и внутренние резьбовые поверхности, а каретка установлена с возможностью перемещения своими внутренними резьбовыми поверхностями по наружным резьбовым поверхностям осей опорных роликов, причем на наружных резьбовых поверхностях опорных роликов установлены введенные в стенд стопорные гайки, при этом опорно-подъемный механизм габаритно-массовой модели ракеты выполнен в виде закрепленных на каретке четырех приливов с выполненными в них фигурными пазами, двух установленных в габаритно-массовой модели ракеты поворотных осей с жестко закрепленными на концах поворотных осей эксцентриками, предназначенными для установки в пазах соответствующих приливов, двух рычагов, шатуна и двух упоров, причем рычаги установлены на наружной поверхности габаритно-массовой модели ракеты таким образом, что каждый из них одним своим концом жестко связан с концом соответствующей поворотной оси, а вторые концы рычагов шарнирно связаны между собой посредством шатуна, при этом один из рычагов установлен между двух, закрепленных на наружной поверхности габаритно-массовой модели ракеты, упоров с возможностью попеременного взаимодействия с ними, причем на торцевой поверхности габаритно-массовой модели ракеты закреплена с возможностью установки в двух положениях введенная в стенд поворотная пластина, предназначенная для взаимодействия в одном из своих положений с закрепленным на кронштейне каретки тензодатчиком измерительного модуля.
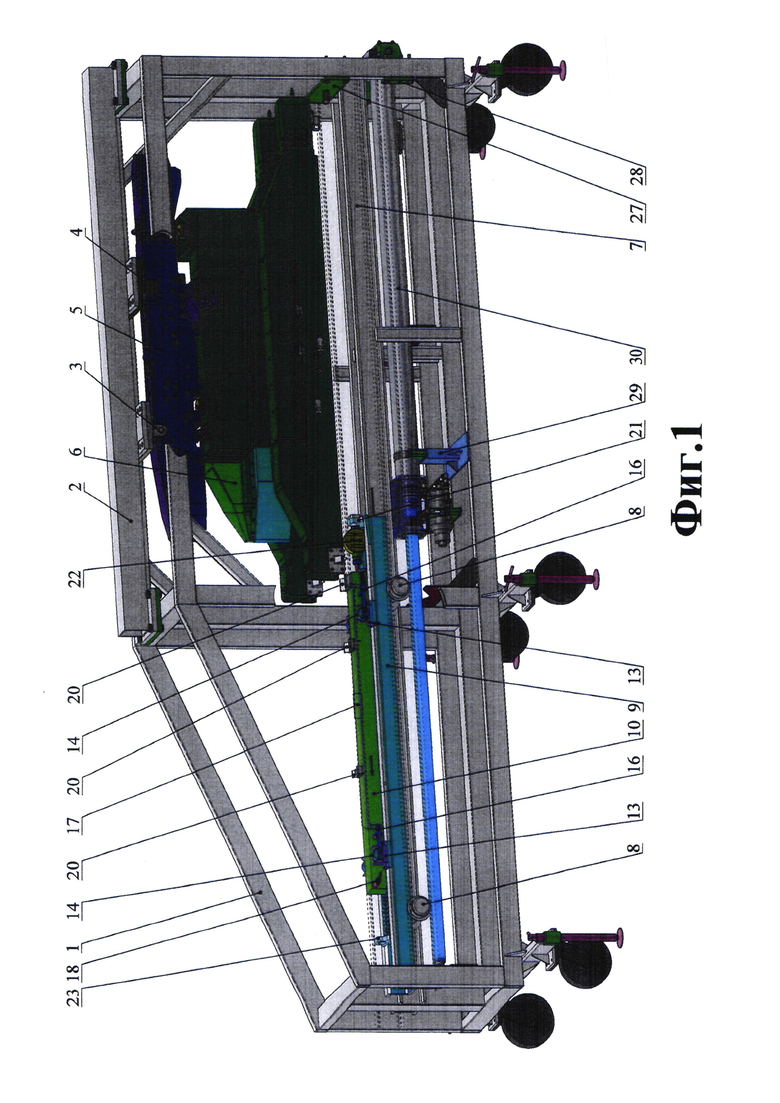
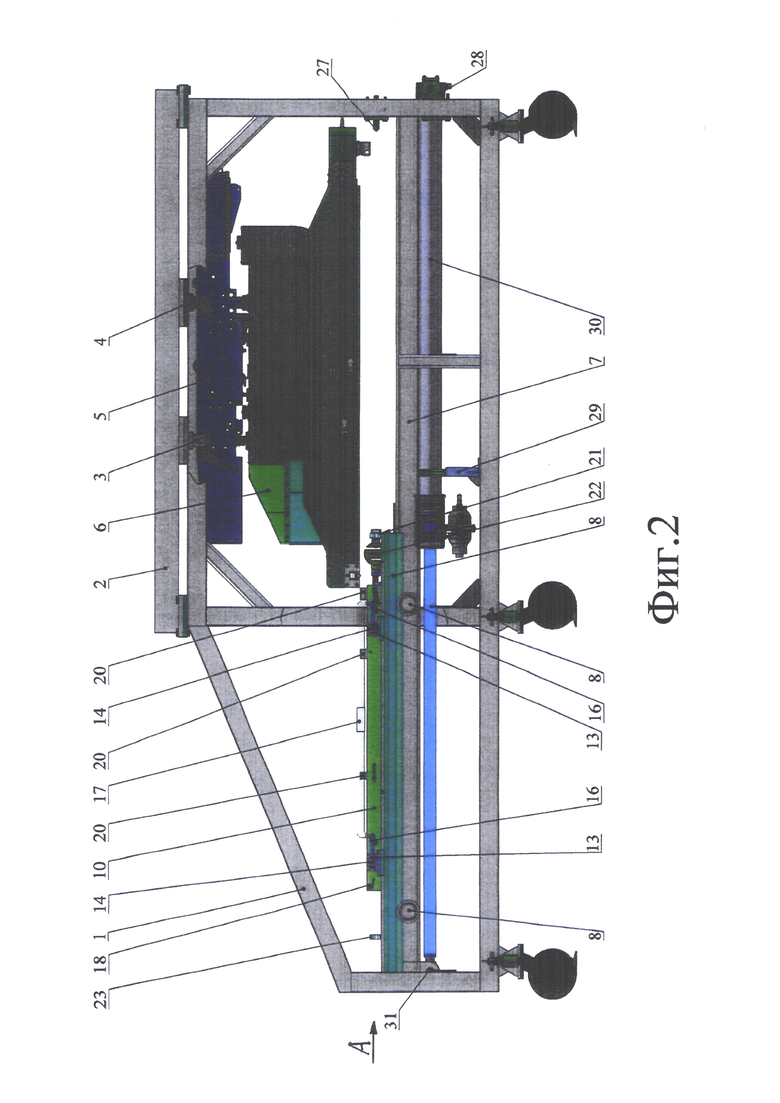
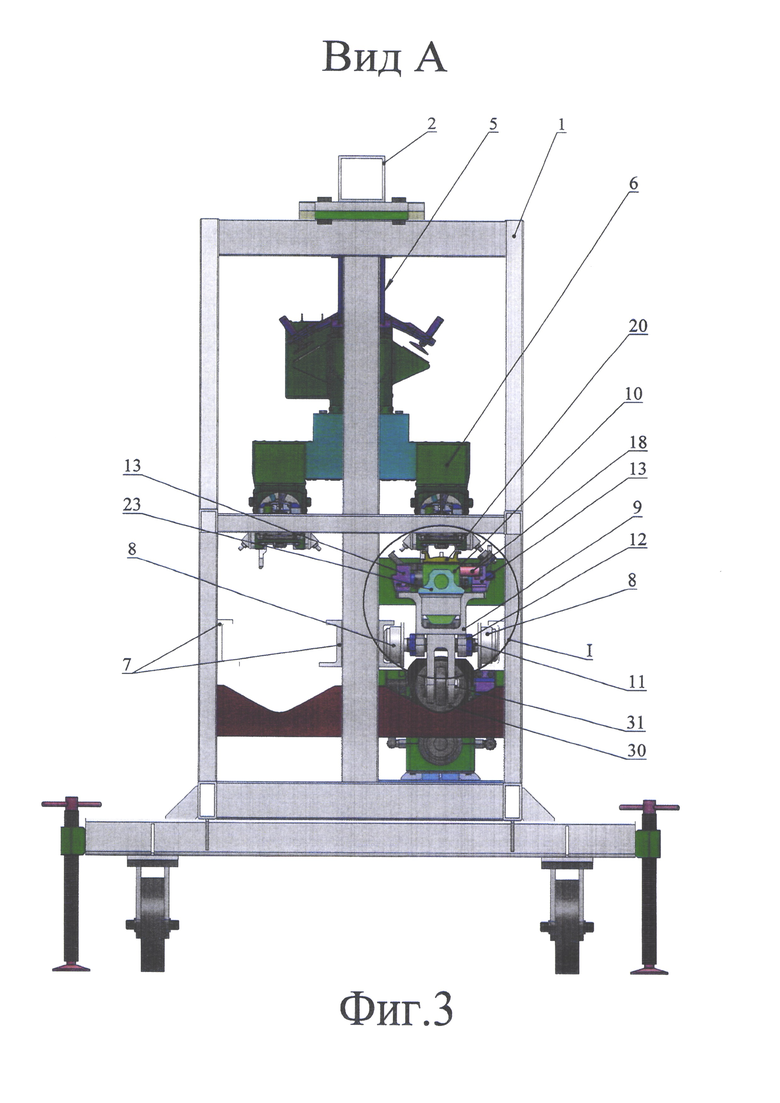
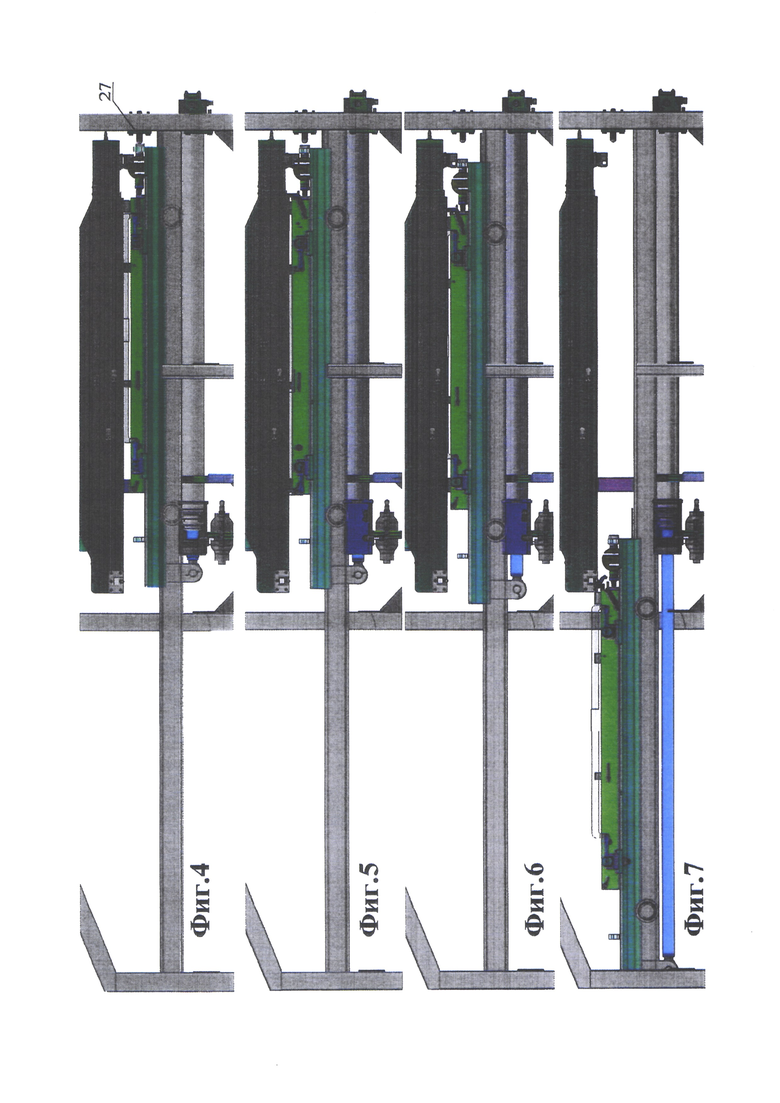
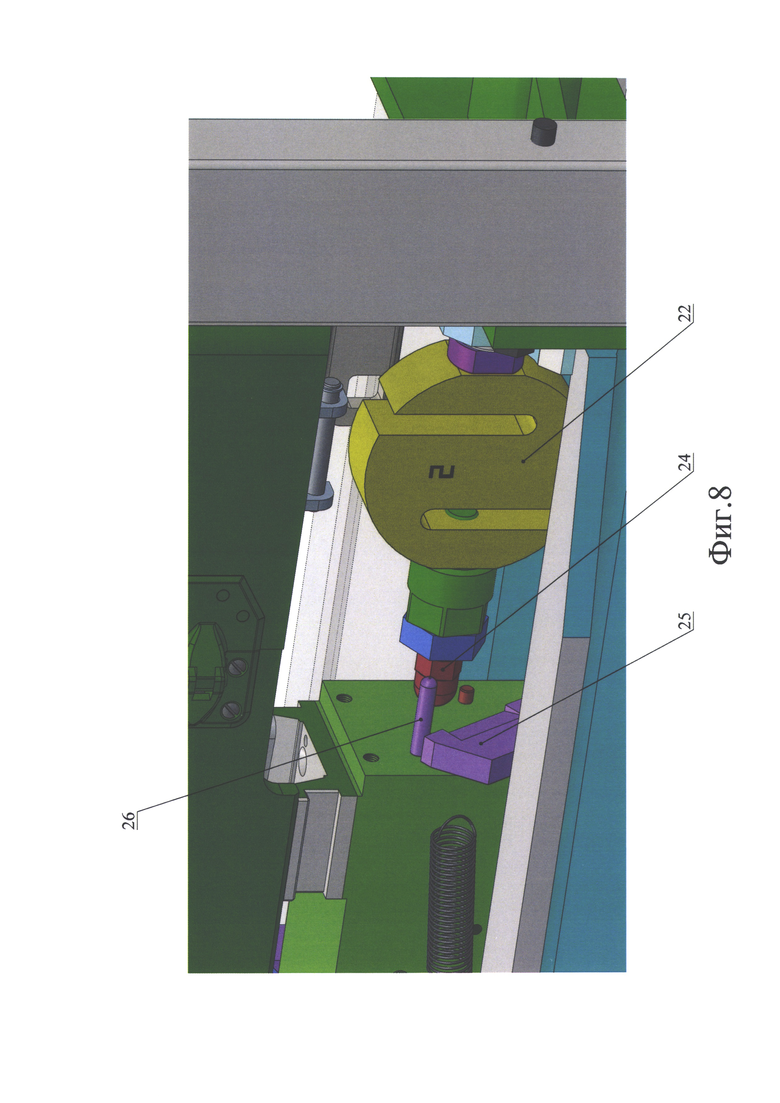
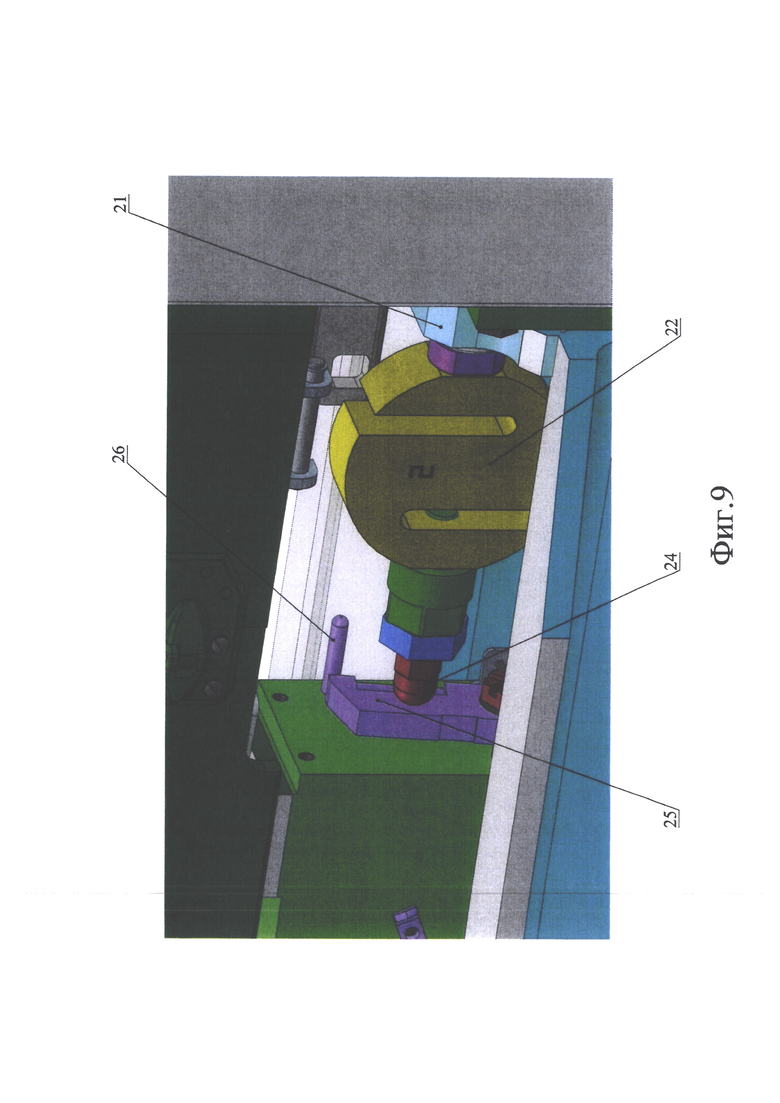
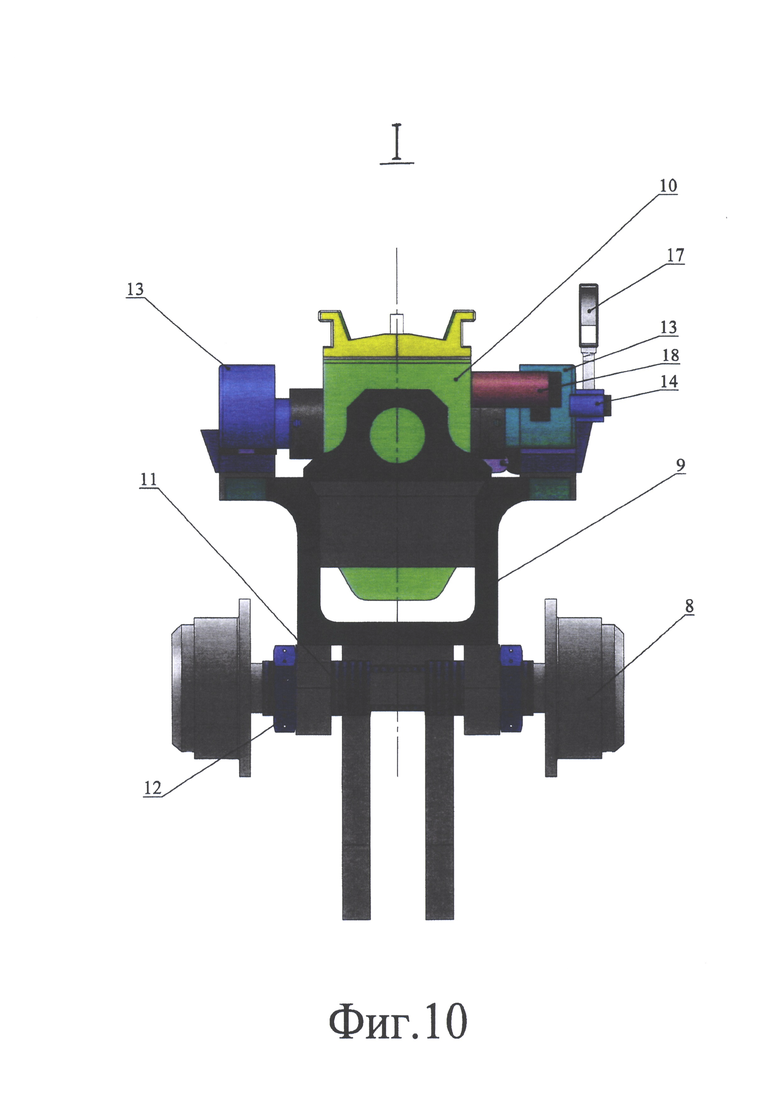
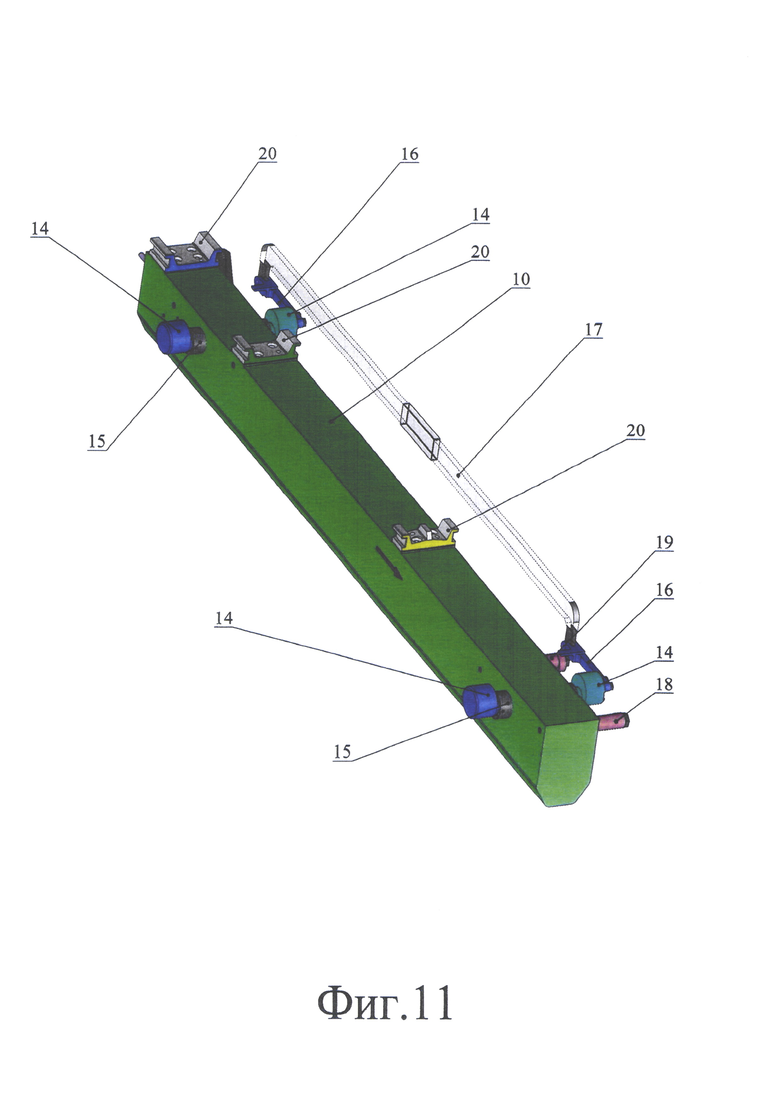
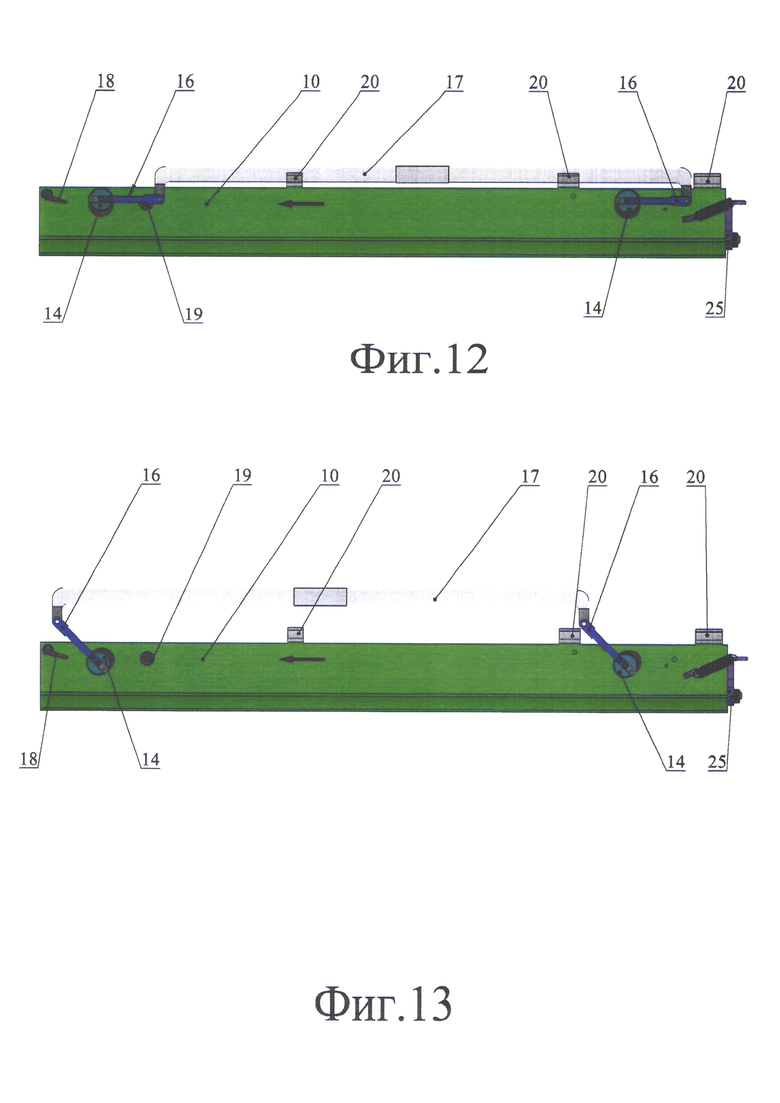
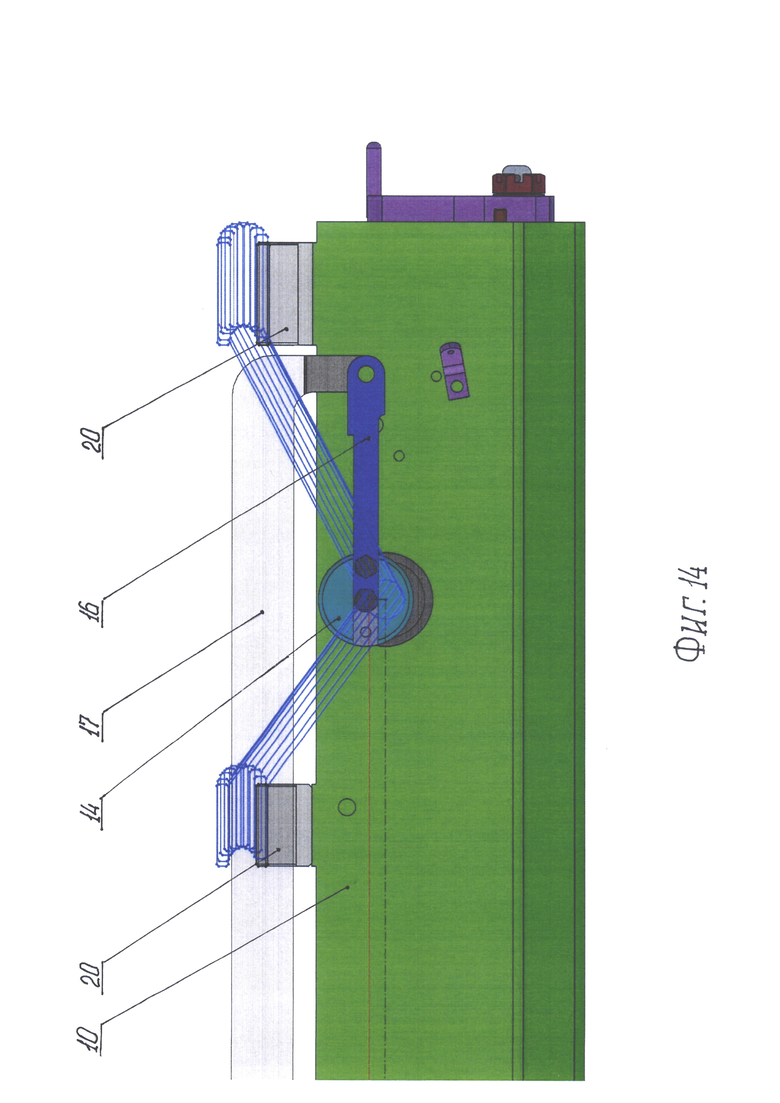
Изобретение поясняется чертежами, где на фиг. 1 - показан общий вид стенда для имитации пуска ракет в изометрии; на фиг. 2 - положение узлов стенда для имитации пуска ракет в исходном положении, вид сбоку; на фиг. 3 - вид А на фиг. 2; на фиг. 4, 5, 6, 7 - положение узлов стенда на разных этапах работы; на фиг. 8 - положение поворотной пластины в нерабочем состоянии; на фиг. 9 - положение поворотной пластины в рабочем состоянии; на фиг. 10 -позиция I на фиг. 2, увеличено; на фиг. 11 - общий вид габаритно-массового макета ракеты с элементами опорно-подъемного механизма; на фиг. 12, 13 - положение элементов опорно-подъемного механизма габаритно-массового макета ракеты при двух положениях шатуна, вид сбоку; на фиг. 14 - траектория перемещения бугелей габаритно-массового макета ракеты при установке на направляющие для схода ракет АПУ.
Для упрощения понимания конструкции стенда для имитации пуска ракет и его работы на чертежах показано только одно из двух параллельно расположенных рабочих мест стенда. Второе рабочее место имеет аналогичную конструкцию (см. фиг. 3).
Стенд для имитации пуска ракет состоит из пространственной рамы 1, предназначенной для крепления на ней основных узлов и деталей стенда. В верхней части рамы 1 размещена продольная балка 2, на которой через самолетные узлы подвески 3 и 4 устанавливается балочный держатель 5 с закрепленным в нем двухместным АПУ 6. Каждое место установки ракеты в АПУ 6 содержит направляющие для схода ракеты с приемными окнами и замковое устройство для фиксации ракеты на направляющих для схода ракет (на чертежах не показаны).
Каждое рабочее место стенда содержит закрепленные на раме 1 продольные направляющие 7, предназначенные для перемещения по ним опорных роликов 8 каретки 9. На каретке 9 размещается ГММ 10 ракеты. ГММ 10 выполнен таким образом, что его масса, расположение центра тяжести и положение бугелей соответствуют аналогичным параметрам конкретной испытываемой ракеты.
На наружных поверхностях осей 11 опорных роликов 8 и сопрягаемых с ними внутренних поверхностях каретки 9 выполнены соответственно наружные и внутренние резьбовые поверхности (см. фиг. 10). Посредством этих резьбовых поверхностей осуществляется перемещение каретки 9 вместе с установленным на ней ГММ 10 вдоль осей 11 опорных роликов 8. Это перемещение каретки 9 позволяет регулировать положение продольной оси ГММ 10 относительно продольной оси симметрии направляющих для схода ракет АПУ 6. Продольная ось ГММ 10 должна располагаться в одной вертикальной плоскости с продольной осью симметрии направляющих для схода ракет АПУ и параллельно ей. На наружных резьбовых поверхностях осей 11 выполнены лыски под гаечный ключ. Положение каретки 9 на осях 11 фиксируется стопорными гайками 12.
На каретке 9 по обе стороны от ГММ 10 попарно расположены четыре прилива 13 с выполненными в них пазами. Пазы приливов 13 предназначены для размещения в них четырех эксцентриков 14 и могут иметь различную форму. Эксцентрики 14 попарно закреплены на концах двух установленных в ГММ 10 поворотных осей 15 с возможностью поворота в пазах соответствующих приливов 13. Наружная поверхность эксцентриков 14 в процессе поворота в пазах приливов 13 взаимодействует с дном паза соответствующего прилива 13. Поворотные оси 15 с эксцентриками 14 посредством двух рычагов 16 и шатуна 17 связаны между собой. На наружной поверхности ГММ 10 со стороны расположения рычагов 16 и шатуна 17 установлены упоры 18 и 19, предназначенные для ограничения углового перемещения одного из рычагов 16. Приливы 13 с пазами, поворотные оси 15 с закрепленными на их концах эксцентриками 14, рычаги 16 с шатуном 17 и упоры 18, 19 образуют опорно-подъемный механизм вертикального перемещения ГММ 10.
На верхней поверхности ГММ 10 установлены бугеля 20, конструктивно идентичные штатным бугелям ракеты и обеспечивающие установку ГММ 10 в направляющих для схода ракет АПУ 6. Передний бугель 20, кроме того, обеспечивает фиксацию ГММ 10 в замковом устройстве АПУ (на чертежах не показан).
В задней части каретки 9 расположен кронштейн 21 на котором крепится тензодатчик 22 измерительного модуля стенда, позволяющий измерять усилие продвижения ГММ 10 по направляющим для схода ракет АПУ 6 на всем пути продвижения бугелей 20 по направляющим для схода ракеты, а так же усилие срабатывания замкового устройства для фиксации ГММ 10 в АПУ 6. В передней части каретки 9 предусмотрена установка кронштейна 23, позволяющего устанавливать тензодатчик 21 для замера усилия продвижения ГММ 10 по направляющим для схода ракет АПУ 6 при движении каретки 9 в обратном направлении. Тензодатчик 22 снабжен регулируемым толкателем 24. На заднем торце ГММ 10 закреплена поворотная пластина 25 с рычагом 26.
На задней вертикальной стойке рамы 1 закреплен регулируемый упор 27 в виде имеющего возможность осевого перемещения болта. При установке каретки 9 в крайнем заднем положении упор 27 взаимодействует с кронштейном 21. В нижней части рамы 1 при помощи основного 28 и дополнительного 29 узлов крепления установлен силовой привод 30, например, в виде гидро-пневмо цилиндра, шток которого посредством оси 31 связан с кареткой 9. Силовой привод 30 обеспечивает возвратно-поступательное перемещение каретки 9 с размещенным на ней ГММ 10 по направляющим 7 в процессе испытаний по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ».
Работа стенда для имитации пуска ракеты осуществляется следующим образом:
На начальном этапе работы каретка 9 находится в исходном крайнем переднем положении (см. фиг. 2). ГММ 10 загружается на каретку 9 таким образом, что бы эксцентрики 14 контактировали с дном паза соответствующего прилива 13 в точке своей наружной поверхности, имеющей наименьший эксцентриситет. Этим достигается крайнее нижнее положение ГММ 10 относительно базовой плоскости направляющих для схода ракет АПУ 6. В этом исходном положении шатун 17 и рычаги 16 занимают положение, фиксируемое упором 19 (см. фиг. 11, 12), а поворотная пластина 25 находится в рабочем положении (см. фиг. 9).
На следующем этапе работы стенда (см. фиг. 4) силовой цилиндр 30 перемещает каретку 9 с установленным на ней ГММ 10 в крайнее заднее положение до контакта кронштейна 21 с регулируемым упором 27. После установки каретки в крайнее заднее положение производится регулировка положения продольной оси ГММ 10 относительно продольной оси симметрии направляющих для схода ракет АПУ 6. Эти оси должны находиться в одной вертикальной плоскости, что обеспечит возможность беспрепятственного попадания бугелей 20 ГММ 10 в приемные окна направляющих для схода ракет АПУ 6 и последующей установки бугелей 20 ГММ 10 на сами направляющие. Поскольку опорные ролики 8 с осями 11 каретки 9 зафиксированы от осевого перемещения в продольных направляющих 7, то при вращении гаечным ключом осей 11 будет происходить перемещение каретки 9 своими внутренними резьбовыми поверхностями по сопрягаемым с ними наружным резьбовым поверхностям осей 11 (см. фиг. 10). Поскольку ГММ 10 установлен на каретке 9, то перемещение каретки 9 приведет к одновременному перемещению продольной оси ГММ 10. Регулировка положения ГММ 10 производится до момента установки продольной оси ГММ 10 в вертикальной плоскости, проходящей через продольную ось симметрии направляющих для схода ракет АПУ 6. Положение каретки 9 с установленным на ней ГММ 10 фиксируется стопорными гайками 12. При этом бугеля 20 ГММ 10 располагаются непосредственно под приемными окнами направляющих для схода ракет АПУ 6.
После окончания регулировки положения продольной оси ГММ 10 относительно продольной оси симметрии направляющих для схода ракет АПУ 6 шатун 17 с рычагами 16 перемещается из положения, зафиксированного упором 19, в положение, определяемое упором 18 (см. фиг. 5, 13). В процессе перемещения шатуна 17 и поворота рычагов 16 происходит поворот эксцентриков 14 из положения в котором наружные поверхности эксцентриков 14 находились в момент установки ГММ 10 на каретку 9 (см. фиг. 12) в положение, при котором эксцентрики 14 контактируют с дном паза соответствующего прилива 13 в точке своей наружной поверхности с наибольшим эксцентриситетом (см. фиг. 13). В результате происходит подъем ГММ 10 над кареткой 9 на величину наибольшего эксцентриситета, заход бугелей 20 в приемные окна направляющих для схода ракет АПУ 6 и установка бугелей 20 над направляющими АПУ 6 с небольшим зазором. Подъем и перемещения происходят по сложной плоскопараллельной дугообразной траектории, определяемой геометрией наружной поверхности эксцентриков 14 (см. фиг. 14). Поворотная пластина 25 до момента перемещения шатуна 17 переводится в нерабочее положение и не взаимодействует с регулируемым толкателем 24 тензодатчика 22 (см. фиг. 8). В противном случае поворотная пластина 25 будет препятствовать перемещению ГММ 10 по плоскопараллельной дугообразной траектории, что может привести в конечном итоге к поломке тензодатчика 22. После установки бугелей 20 над направляющими для схода ракет АПУ 6 поворотная пластина 25 переводится в рабочее положение и осуществляется выдвижение толкателя 24 до упора в поворотную пластину 25(см. фиг. 9).
Затем подается команда на силовой цилиндр 30 и происходит перемещение каретки 9 вместе с ГММ 10 вперед (см. фиг. 6). В самом начале перемещения каретки 9 шатун 17 возвращается в первоначальное положение, определяемое взаимодействием одного из рычагов 16 с упором 19 (см. фиг. 11, 12). В результате эксцентрики 14 повернутся в пазах соответствующих приливов 13 таким образом, что наружные поверхности эксцентриков 14 своими точками с наименьшим эксцентриситетом будут направлены в сторону дна паза прилива 13, а между дном пазов и наружными поверхностями эксцентриков 14 в точках с наименьшим эксцентриситетом образуется зазор. При этом выбирается зазор между бугелями 20 ГММ 10 и направляющими для схода ракет АПУ 6 и ГММ 10 повисает всей своей массой на направляющих для схода ракет АПУ 6. Усилие от штока силового привода 30 передается на каретку 9, затем через закрепленный на каретке 9 кронштейн 21 - на тензодатчик 22 и через регулируемый толкатель 24 тензодатчика 22 и установленную в рабочее положение поворотную пластину 25 - на ГММ 10. Такая схема передачи усилия от привода 30 к ГММ 10 позволяет исключить влияние величины силы сопротивления качению опорных роликов 8 каретки 9 по продольным направляющим 7 стенда на результат измерения усилий, возникающих на всем пути перемещения бугелей 20 ГММ 10 по направляющим для схода ракет АПУ 6 и усилий срабатывания замкового устройства при фиксации ракеты в АПУ.
В процессе перемещения ГММ 10 его бугеля 20 скользят по направляющим для схода ракет АПУ 6 до момента фиксации переднего бугеля 20 ГММ 10 в замковом устройстве АПУ 6. Во время перемещения ГММ 10 до момента его фиксации в замковом устройстве АПУ 6 тензодатчик 22 производит замер усилия, с. которым ГММ 10 перемещается по направляющим для схода ракет в процессе установки ГММ 10 до момента его фиксации в замковом устройстве АПУ.
При фиксации первого бугеля 19 ГММ 10 в замке АПУ 6 происходит замер усилия удержания ГММ 10 в замковом устройстве АПУ 6. При нарастании усилия, создаваемого силовым приводом 30, происходит раскрытие замкового устройства АПУ 6 и ГММ 10 продолжит свое движение по направляющим для схода ракет. Тензодатчик 22 при этом осуществляет замеры усилия срабатывания замкового устройства АПУ 6 на раскрытие и усилия, с которым ГММ 10 продолжит перемещаться по направляющим для схода ракет до момента схода ГММ 10 с направляющих.
После схода ГММ 10 с направляющих АПУ 6 эксцентрики 14 вместе с ГММ 10 падают в пазы соответствующих приливов 13 каретки 9 (см. фиг. 7). При этом один из рычагов 15 остается в контакте с упором 19, а эксцентрики 14 контактируют своей наружной поверхностью в точке с наименьшим эксцентриситетом с дном паза соответствующего прилива 13 (см. фиг. 11, 12). Таким образом ГММ 10 занимает на каретке исходное крайнее переднее положение при котором происходила загрузка ГММ 10 на каретку 9 (см. фиг. 2). Стенд готов для следующего цикла испытаний.
Испытания проводятся в объеме подтверждения заданного техническим заданием ресурса работы объекта испытаний - АПУ с направляющими для схода ракет и замковым устройством для фиксации ракеты на этих направляющих.
Таким образом при использовании заявленного стенда имитации пуска ракеты ресурсные испытания проходят в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ» с одновременным непрерывным измерением усилий, возникающих на всем пути перемещения бугелей 20 ГММ 10 по направляющим для схода ракет АПУ 6, а так же усилий срабатывания замкового устройства при фиксации ракеты в АПУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для имитации пуска авиационной ракеты | 2021 |
|
RU2767553C1 |
| СТЕНД ДЛЯ МНОГОКРАТНОЙ ИМИТАЦИИ ПУСКА АВИАЦИОННОЙ РАКЕТЫ | 2012 |
|
RU2519596C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ СХОДА АВИАЦИОННОЙ РАКЕТЫ | 2012 |
|
RU2511217C1 |
| АВИАЦИОННОЕ ПУСКОВОЕ УСТРОЙСТВО | 2004 |
|
RU2259306C1 |
| АВИАЦИОННОЕ ПУСКОВОЕ УСТРОЙСТВО | 2005 |
|
RU2272981C1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 2004 |
|
RU2259933C1 |
| УНИФИЦИРОВАННОЕ ВНУТРИФЮЗЕЛЯЖНОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО И ЕГО СИЛОВОЙ ПРИВОД | 2008 |
|
RU2381146C2 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 2005 |
|
RU2271312C1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1999 |
|
RU2145565C1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1999 |
|
RU2145566C1 |
Изобретение относится к области ракетной техники, в частности к устройствам для установки и пуска авиационных ракет, а именно к испытательным стендам для измерения усилий, возникающих при перемещении, фиксации и сходе авиационных ракет с направляющих авиационных пусковых устройств. Стенд для имитации пуска авиационной ракеты состоит из пространственной рамы с закрепленными в ней авиационным пусковым устройством (далее - АПУ) и продольными направляющими, предназначенными для перемещения по ним опорных роликов каретки при помощи силового привода. На каретке размещается габаритно-массовый макет (далее - ГММ) ракеты. На начальном этапе работы стенда в процессе принудительного вращении осей опорных роликов происходит перемещение каретки своими внутренними резьбовыми поверхностями по наружным резьбовым поверхностям этих осей. Это перемещение каретки обеспечивает правильную установку продольной оси ГММ относительно продольной оси симметрии направляющих для схода ракет АПУ. Стенд снабжен опорно-подъемным механизмом вертикального перемещения ГММ, выполненным в виде установленных в ГММ на двух поворотных осях эксцентриков, рычагов с шатуном, упоров и установленных на каретке приливов с пазами. Эксцентрики устанавливаются в соответствующие пазы приливов. За счет перемещения шатуна с рычагами и поворота эксцентриков в пазах приливов происходит вертикальное плоскопараллельное дугообразное перемещение ГММ и заход бугелей в приемные окна направляющих для схода ракет АПУ с последующей установкой бугелей на эти направляющие. Усилие от штока силового привода через каретку, тензодатчик и кронштейн передается на ГММ. В процессе перемещения ГММ по направляющим для схода ракет АПУ происходит непрерывное измерение усилий, возникающих на всем пути перемещения бугелей ГММ по направляющим для схода ракет АПУ, а также усилий срабатывания замкового устройство для фиксации ракеты в АПУ. Техническим результатом является повышение точности измерения усилий, возникающих на всем пути перемещения ГММ по направляющим для схода ракет АПУ, а также усилий срабатывания замкового устройства для фиксации ракеты в АПУ. 14 ил.
Стенд для имитации пуска авиационной ракеты, содержащий пространственную раму с жестко закрепленными на ней авиационным пусковым устройством и продольными направляющими, каретку с кронштейном и закрепленными на осях опорными роликами, предназначенными для установки в продольных направляющих, силовой привод перемещения каретки, опорно-подъемный механизм габаритно-массовой модели ракеты и тензодатчик измерительного модуля, отличающийся тем, что на наружных поверхностях осей опорных роликов и сопрягаемых с ними внутренних поверхностях каретки выполнены соответственно наружные и внутренние резьбовые поверхности, а каретка установлена с возможностью перемещения своими внутренними резьбовыми поверхностями по наружным резьбовым поверхностям осей опорных роликов, причем на наружных резьбовых поверхностях опорных роликов установлены введенные в стенд стопорные гайки, при этом опорно-подъемный механизм габаритно-массовой модели ракеты выполнен в виде закрепленных на каретке четырех приливов с выполненными в них пазами, двух установленных в габаритно-массовой модели ракеты поворотных осей с жестко закрепленными на концах поворотных осей эксцентриками, предназначенными для установки в пазах соответствующих приливов, двух рычагов, шатуна и двух упоров, причем рычаги установлены на наружной поверхности габаритно-массовой модели ракеты таким образом, что каждый из них одним своим концом жестко связан с концом соответствующей поворотной оси, а вторые концы рычагов шарнирно связаны между собой посредством шатуна, при этом один из рычагов установлен между двух закрепленных на наружной поверхности габаритно-массовой модели ракеты упоров с возможностью попеременного взаимодействия с ними, причем на торцевой поверхности габаритно-массовой модели ракеты закреплена с возможностью установки в двух положениях введенная в стенд поворотная пластина, предназначенная для взаимодействия в одном из своих положений с закрепленным на кронштейне каретки тензодатчиком измерительного модуля.
| СТЕНД ДЛЯ МНОГОКРАТНОЙ ИМИТАЦИИ ПУСКА АВИАЦИОННОЙ РАКЕТЫ | 2012 |
|
RU2519596C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПУСКОВОГО УСТРОЙСТВА АВИАЦИОННОЙ РАКЕТЫ | 2008 |
|
RU2365851C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ИМПУЛЬСА СИЛЫ, ДЕЙСТВУЮЩЕЙ ПРИ ВЫСТРЕЛЕ НА ПУСКОВОЕ УСТРОЙСТВО СТРЕЛКОВОГО ИЛИ РАКЕТНОГО ВООРУЖЕНИЯ | 2005 |
|
RU2285220C1 |

