Изобретение относится к области ракетной техники, в частности, к устройствам для установки и пуска авиационных ракет, а именно, к испытательным стендам, предназначенным для ресурсных испытаний механических узлов авиационных пусковых устройств (далее - АПУ), в частности отбойников механизма раскрытия аэродинамических рулей ракеты.
Изобретение может быть использовано как средство контроля технического состояния и износа механических узлов АПУ, в частности отбойников механизма раскрытия аэродинамических рулей ракеты, для принятия решения о целесообразности их дальнейшей эксплуатации или замене.
Известен стенд для контроля параметров схода авиационной ракеты по патенту РФ на изобретение №2511217, МПК F41F 3/04, F41F 3/06, 2012 г., содержащий пространственную раму на которой посредством самолетных узлов подвески закреплено АПУ с отбойниками механизма раскрытия аэродинамических рулей ракеты, предназначенное для установки в ней ракеты, продольные направляющие, перемещающуюся по направляющим каретку, два хомута, предназначенные для размещения в них ракеты, закрепляемую на носовой части ракеты опору, привод продольного перемещения ракеты, выполненный в виде закрепленного внизу пространственной рамы силового цилиндра с гибкой тягой, один конец которой связан со штоком силового цилиндра, а второй конец через закрепленные на раме обводные ролики - с хвостовой частью ракеты и механизм вертикального перемещения ракеты, выполненный в виде связанной с кареткой посредством винтового механизма рамки на которой закреплены концы хомутов для размещения ракеты. Данный стенд предназначен для проведения испытаний АПУ с одновременным непрерывным измерением усилий, возникающих на всем пути перемещения ракеты по направляющим для схода ракет АПУ. Недостатком данного стенда является то, что стенд не предназначен для проведения ресурсных испытаний отбойников механизма раскрытия аэродинамических рулей ракеты и не может работать в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ».
Известен стенд для многократной имитации пуска авиационной ракеты по патенту РФ на изобретение №2519596, МПК F41F 3/04, F41F 3/06, 2012 г., содержащий пространственную раму на которой посредством самолетных узлов подвески закреплено АПУ с отбойниками механизма раскрытия аэродинамических рулей ракеты, предназначенное для установки в ней габаритно-массового макета (далее - ГММ) ракеты, закрепленные на раме продольные направляющие в которых с возможностью возвратно-поступательного перемещения посредством силового цилиндра установлена каретка со стопорным механизмом и опорно-подъемным механизмом перемещения ГММ ракеты, обеспечивающим удержание ГММ ракеты при сходе с АПУ и возврат его в исходное положение перед установкой в АПУ, при этом опорно-подъемный механизм перемещения ГММ выполнен в виде шарнирно установленных на каретке и связанных между собой продольной тягой двух вертикальных стоек с выполненными в торцах этих стоек карманами, предназначенными для расположения в них цапф ГММ ракеты, причем на одной из стоек жестко закреплен рычаг с роликом, обеспечивающим взаимодействие с установленной на раме профилированной нижней направляющей. Данный стенд предназначен для проведения ресурсных испытаний АПУ в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ» с одновременным непрерывным измерением усилий, возникающих на всем пути перемещения ракеты по направляющим для схода ракет АПУ. Однако данный стенд тоже не предназначен для проведения ресурсных испытаний отбойников механизма раскрытия аэродинамических рулей ракеты. Данное техническое решение является наиболее близким по своей технической сути и принимается за прототип.
Технической проблемой, на решение которой направлено предложенное техническое решение, является невозможность проведения ресурсных испытаний установленных на АПУ отбойников механизма раскрытия аэродинамических рулей ракеты в процессе проведения испытаний АПУ на стендах, работающих по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ» в автоматическом режиме.
Достигаемым техническим результатом от использования предложенного технического решения является расширение технологических возможностей стендов для проведения испытаний АПУ, достигаемое за счет возможности проведения ресурсных испытаний отбойников механизма раскрытия аэродинамических рулей ракеты на любом стенде для испытаний АПУ, работающему по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ» в автоматическом режиме путем установки на стенд устройства имитации механизма раскрытия аэродинамических рулей ракеты.
Указанная выше техническая проблема решается путем использования стенда для имитации пуска авиационной ракеты, содержащего пространственную раму с жестко закрепленными на ней авиационным пусковым устройством с отбойниками механизма раскрытия аэродинамических рулей ракеты и продольными направляющими, установленную на продольных направляющих каретку, привод перемещения каретки, опорно-подъемный механизм габаритно-массовой модели ракеты и устройство имитации механизма раскрытия аэродинамических рулей ракеты, выполненное в виде закрепленного своей средней частью на торцевой поверхности габаритно-массовой модели ракеты U-образного кронштейна, двух тарированных пружин и установленных на концах U-образного кронштейна с возможностью поворота двух Г-образных рычагов, причем на одном конце каждого Г-образного рычага закреплен флажок, предназначенный для взаимодействия с соответствующим отбойником механизма раскрытия аэродинамических рулей ракеты, а другой конец каждого Г-образного рычага подпружинен в сторону торцевой поверхности габаритно-массовой модели ракеты посредством соответствующей тарированной пружины, при этом на концах U-образного кронштейна выполнены упоры, обеспечивающие установку флажков Г-образных рычагов под углом относительно торцевой поверхности габаритно-массовой модели ракеты.
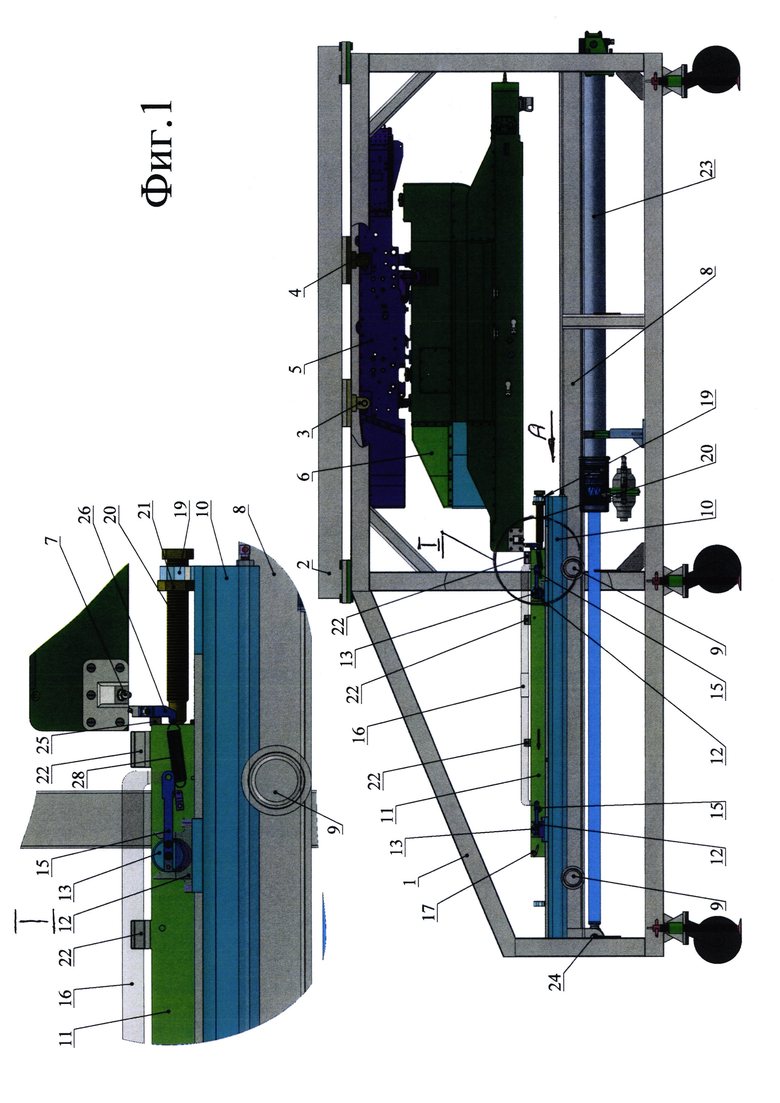
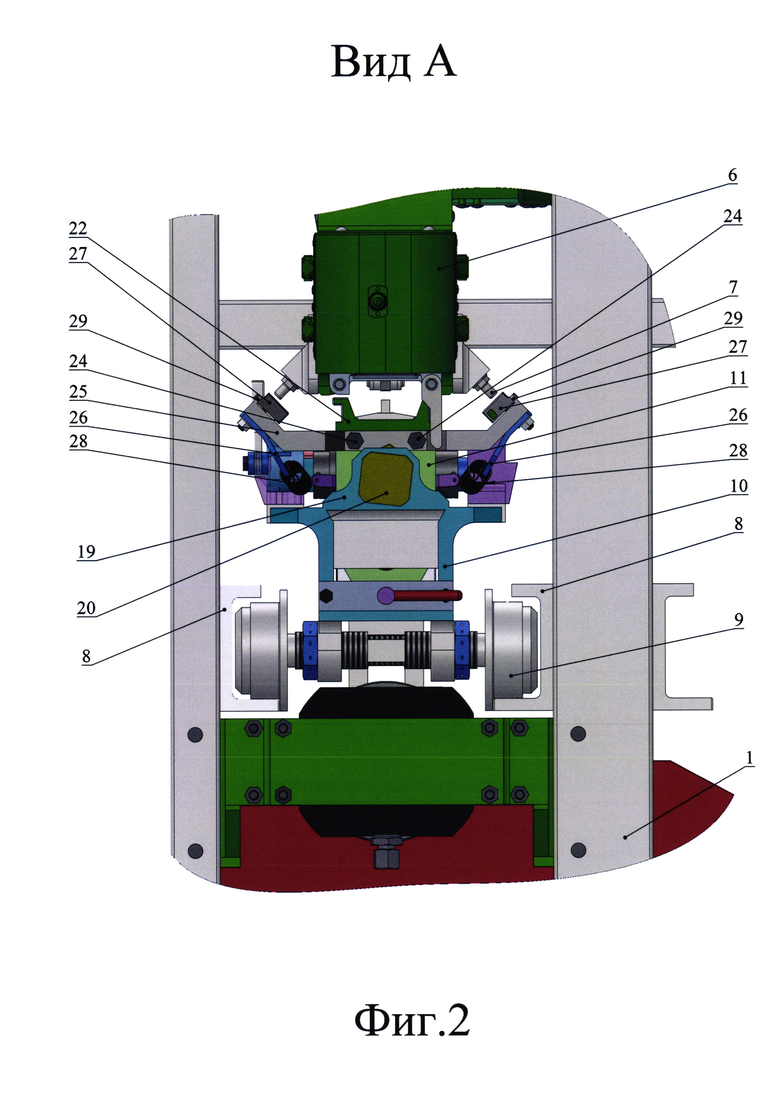
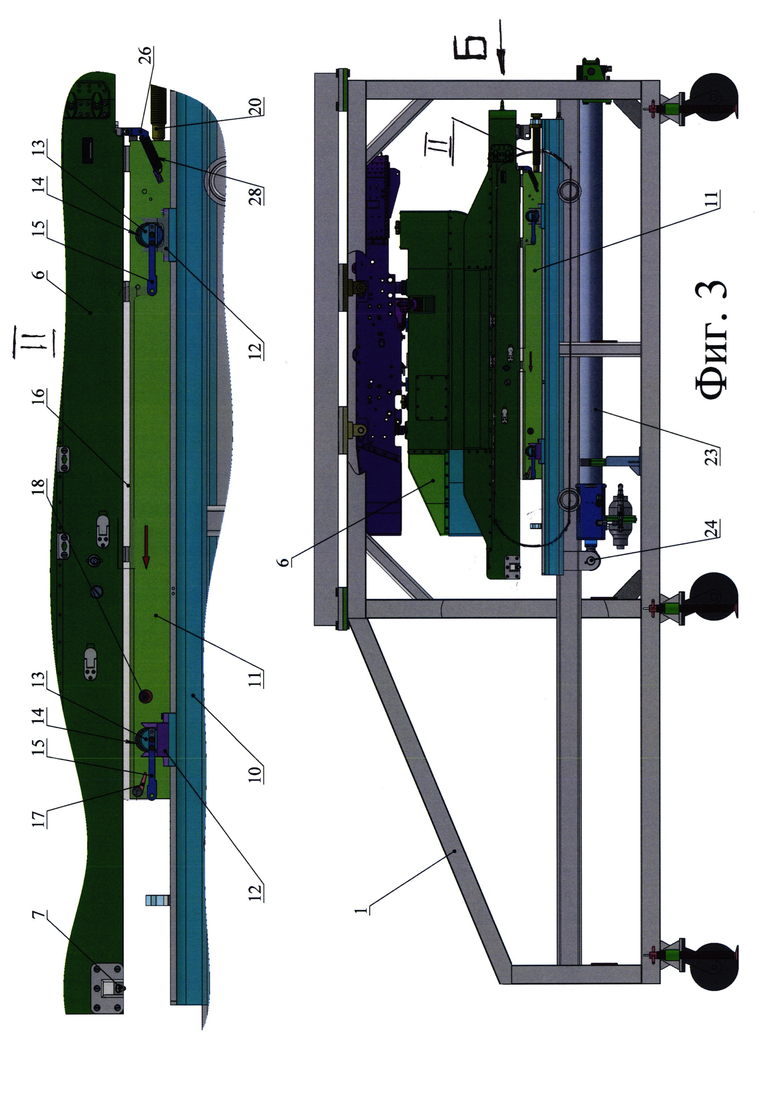
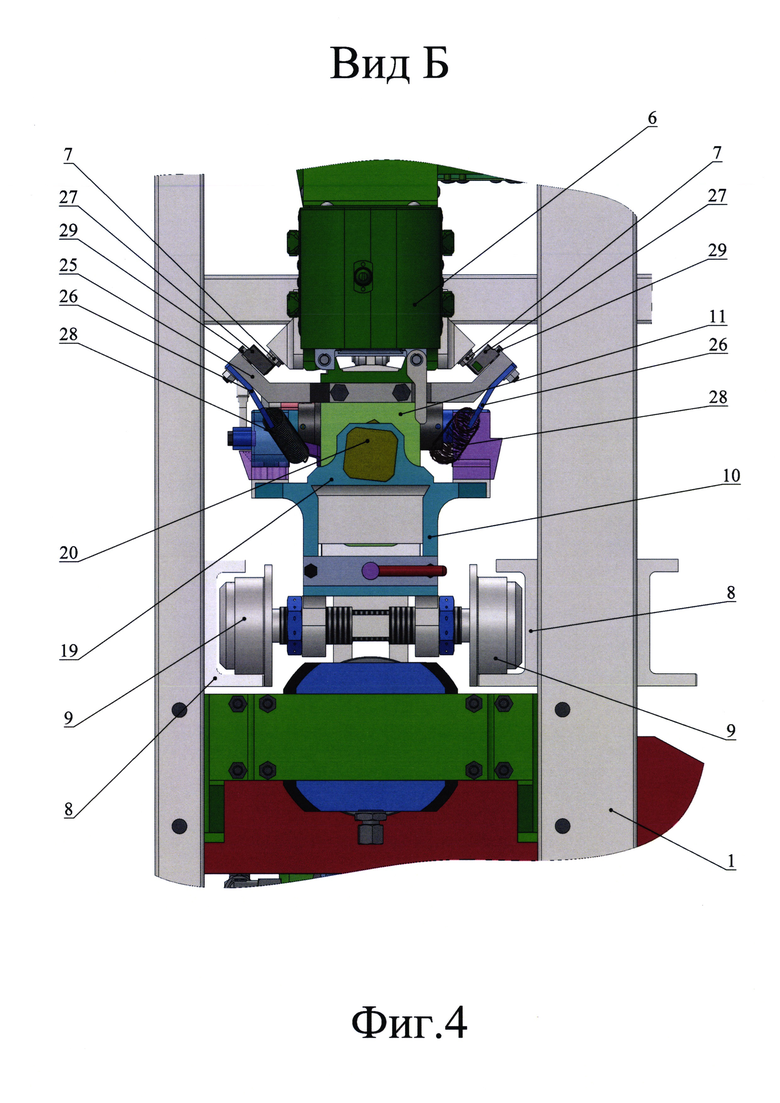
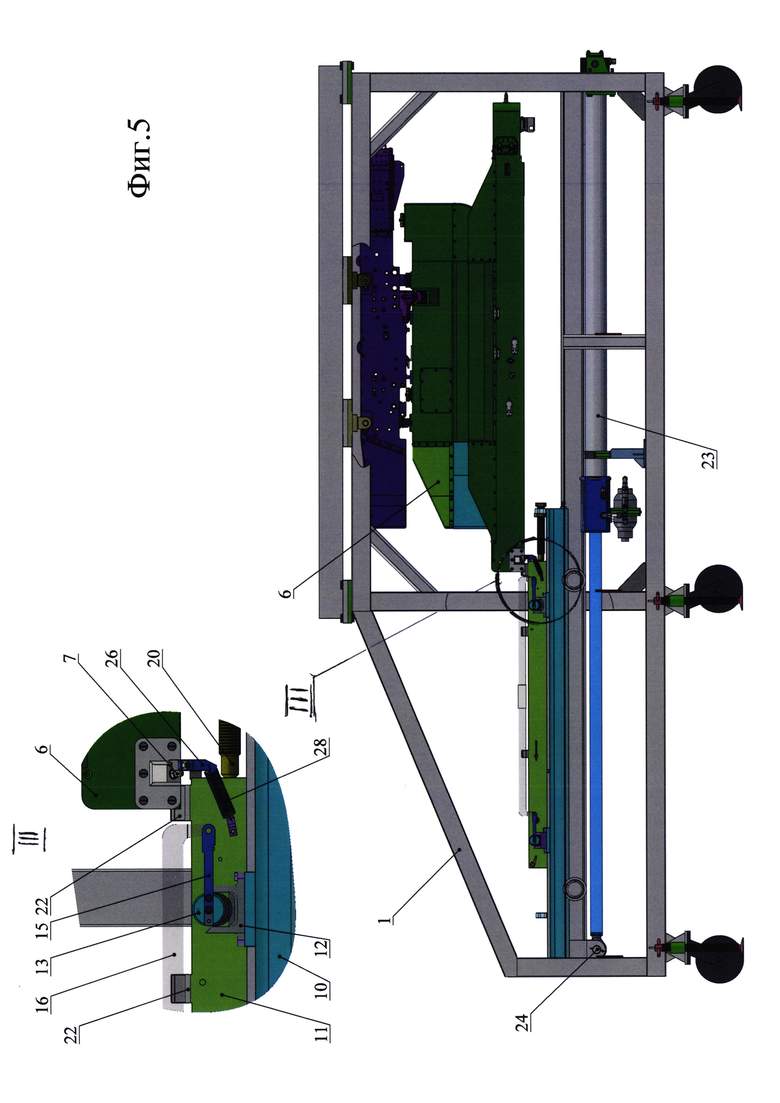
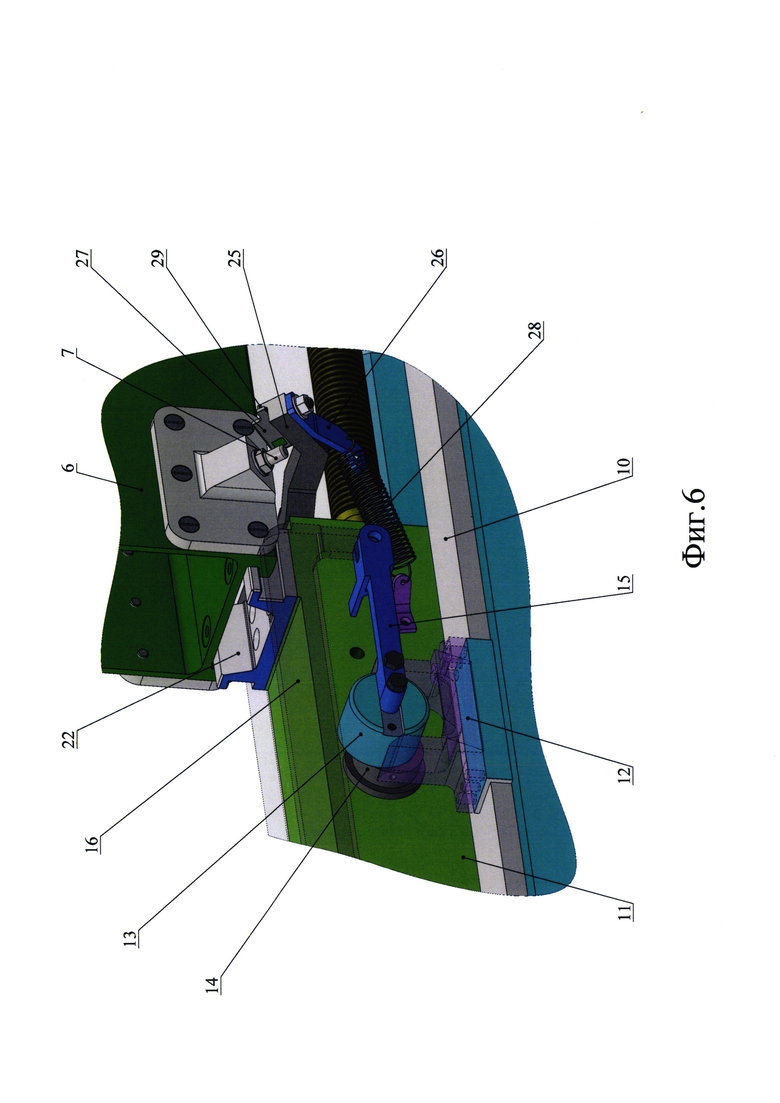
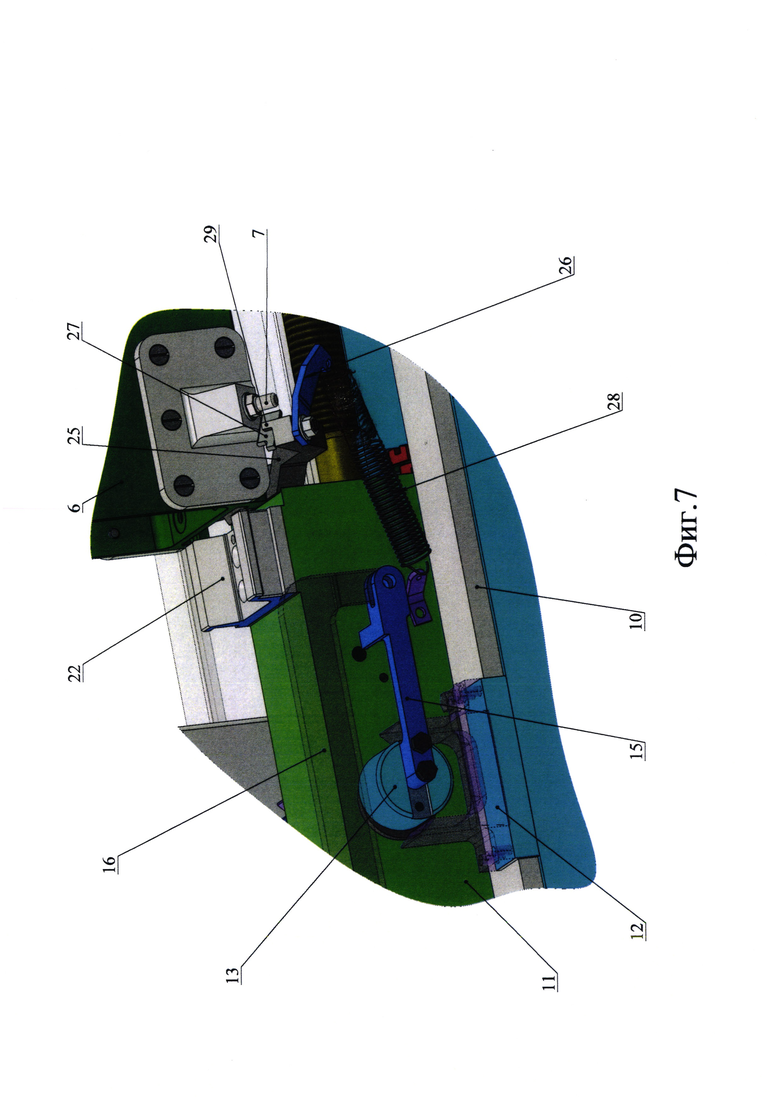
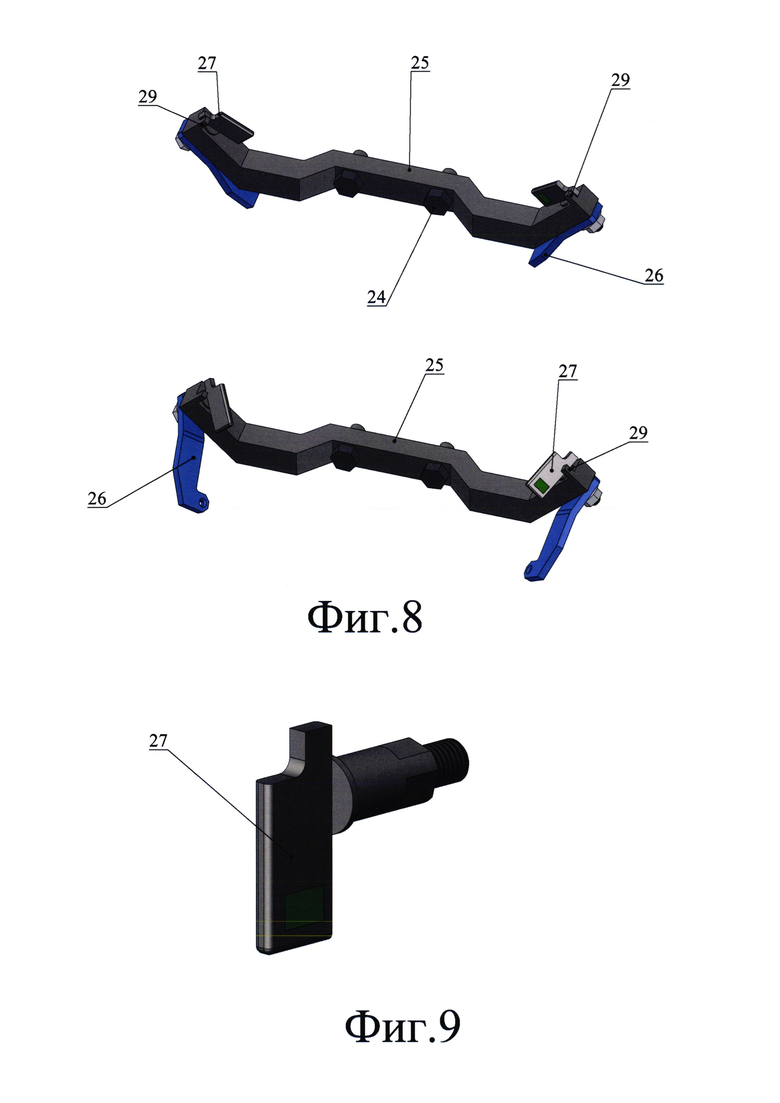
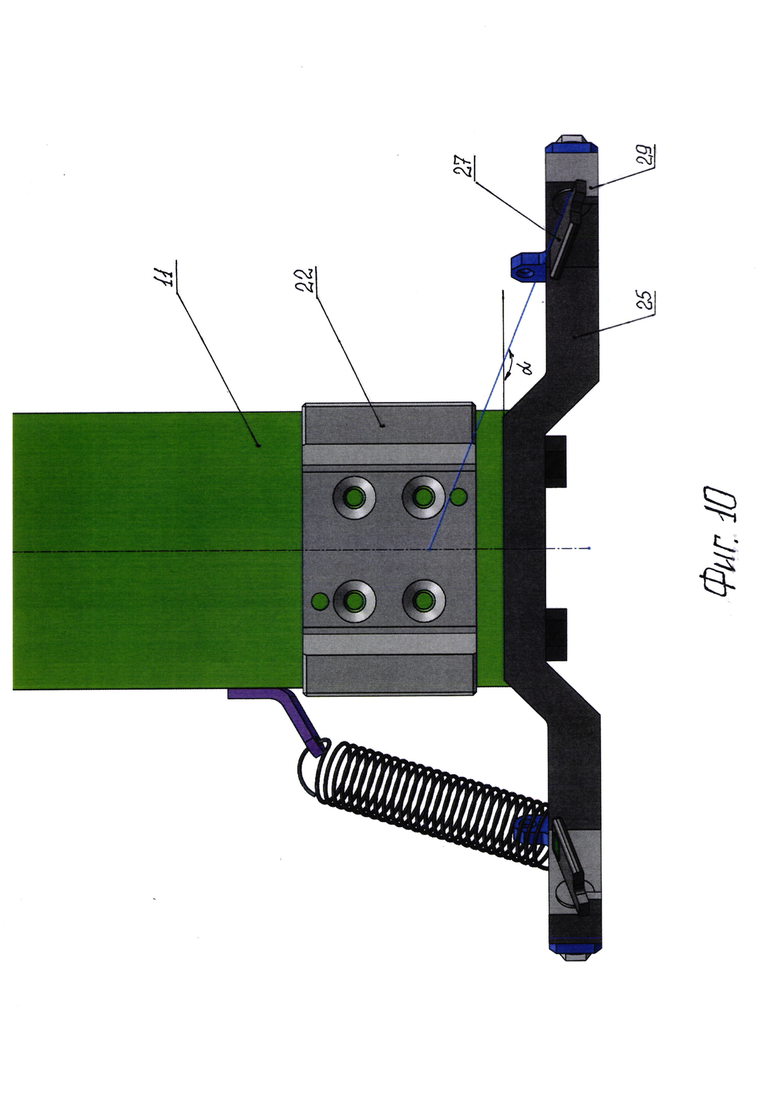
Изобретение поясняется чертежами, где на фиг. 1 показано положение узлов стенда для имитации пуска ракет в исходном положении; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - положение узлов стенда для имитации пуска ракет в процессе установки ГММ на направляющие для схода ракет АПУ; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - положение узлов стенда для имитации пуска ракет в момент схода ГММ с направляющих для схода ракет АПУ; на фиг. 6 - взаимодействие отбойника механизма раскрытия аэродинамических рулей ракеты с флажком устройства имитации механизма раскрытия аэродинамических рулей ракеты в начальный момент схода ГММ с направляющих для схода ракет АПУ; на фиг. 7 - взаимное расположение отбойника механизма раскрытия аэродинамических рулей ракеты и флажка устройства имитации механизма раскрытия аэродинамических рулей ракеты после схода ГММ с направляющих для схода ракет АПУ; на фиг. 8 - устройство имитации механизма раскрытия аэродинамических рулей ракеты в сборе при двух положениях флажка; на фиг. 9 - вариант конструктивного выполнения флажка устройства имитации механизма раскрытия аэродинамических рулей ракеты; на фиг. 10 - расположение флажка устройства имитации механизма раскрытия аэродинамических рулей ракеты по отношению к торцевой поверхности ГММ.
Стенд для имитации пуска ракет состоит из пространственной рамы 1, предназначенной для крепления на ней основных узлов и деталей стенда. В верхней части рамы 1 размещена продольная балка 2, на которой через самолетные узлы подвески 3 и 4 устанавливается балочный держатель 5 с закрепленным в нем АПУ 6. АПУ 6 содержит два отбойника 7 механизма раскрытия аэродинамических рулей ракеты, направляющие для схода ракеты с приемными окнами и замковое устройство для фиксации ракеты на направляющих для схода ракет. На раме 1 закреплены продольные направляющие 8, предназначенные для перемещения по ним опорных роликов 9 каретки 10. На каретке 10 размещается ГММ 11 ракеты. ГММ 11 выполнен таким образом, что его масса, расположение центра тяжести и положение бугелей соответствуют аналогичным параметрам конкретной испытываемой ракеты.
На каретке 10 по обе стороны от ГММ И попарно расположены четыре прилива 12 с выполненными в них пазами. Пазы приливов 12 предназначены для размещения в них четырех эксцентриков 13 и могут иметь различную конфигурацию. Эксцентрики 13 закреплены на концах двух, установленных в ГММ 11, поворотных осей 14 и имеют возможность поворота в пазах соответствующих приливов 12. Наружная поверхность эксцентриков 13 в процессе поворота в пазах приливов 12 взаимодействует с дном паза соответствующего прилива 12. Поворотные оси 14 с эксцентриками 13 посредством двух рычагов 15 и шатуна 16 связаны между собой. На наружной поверхности ГММ 11 со стороны расположения рычагов 15 и шатуна 16 установлены упоры 17 и 18, предназначенные для ограничения углового перемещения одного из рычагов 15. Приливы 12 с пазами, поворотные оси 14 с закрепленными на их концах эксцентриками 13, рычаги 15 с шатуном 16 и упоры 17 и 18 образуют опорно-подъемный механизм вертикального перемещения ГММ 11. На каретке 10 жестко закреплен упор 19 с резьбовым отверстием, предназначенным для установки в нем регулируемого толкателя 20. Регулируемый толкатель 20 может быть выполнен, например, в виде болта, фиксируемого контргайкой 21.
На верхней поверхности ГММ 11 установлены бугеля 22, конструктивно идентичные штатным бугелям ракеты и обеспечивающие установку ГММ 11 в направляющих для схода ракет АПУ 6.
В нижней части рамы 1 установлен силовой привод 23, выполненный, например, в виде гидро-пневмо цилиндра. Шток силового привода 23 посредством оси 24 связан с кареткой 10. Силовой привод 23 обеспечивает возвратно-поступательное перемещение каретки 10 с размещенным на ней ГММ 11 по направляющим 8 в процессе испытаний по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ».
На торцевой поверхности ГММ 11 при помощи болтов 24 закреплен U-образный кронштейн 25. На концах U-образного кронштейна 25 установлены Г-образные рычаги 26. Г-образные рычаги 26 установлены с возможностью поворота в U-образном кронштейне 25. На одном конце каждого Г-образного рычага 26 закреплен флажок 27. Другой конец каждого Г-образного рычага 26 поджат в направлении торца ГММ 11 посредством тарированной пружины 28, при этом флажки 27 взаимодействуют с выполненными на концах U-образного кронштейна 25 упорами 29 и занимают в кронштейне 25 положение под определенным углом а относительно торцевой поверхности ГММ 11 (см. фиг, 10), чем облегчается срабатывание устройства имитации механизма раскрытия аэродинамических рулей ракеты.
Флажки 27 предназначены для взаимодействия с соответствующими отбойниками 7 механизма раскрытия аэродинамических рулей ракеты в процессе схода ГММ 11 с направляющих для схода ракет АПУ 6. U-образный кронштейн 25, Г-образные рычаги 26 с упорами 29 и флажками 27, а так же тарированные пружины 28 образуют устройство имитации механизма раскрытия аэродинамических рулей ракеты.
Работа стенда для имитации пуска ракеты осуществляется следующим образом:
На начальном этапе работы каретка 10 находится в исходном крайнем переднем положении (см. фиг. 1). ГММ 11 загружается на каретку 10 таким образом, что бы эксцентрики 13 контактировали с дном паза соответствующего прилива 12 в точке своей наружной поверхности, имеющей наименьший эксцентриситет, при этом шатун 16 и рычаги 15 занимают положение, показанное на фиг. 1. Этим достигается крайнее нижнее положение ГММ 11 относительно базовой плоскости направляющих для схода ракет АПУ 6, при этом бугеля 22 ГММ 11 располагаются ниже направляющих для схода ракет АПУ 6. На начальном этапе работы (в исходном положении ГММ 11) закрепленные на АПУ 6 отбойники 7 механизма раскрытия аэродинамических рулей ракеты располагаются над флажками 27 устройства имитации механизма раскрытия аэродинамических рулей ракеты и за ними (см. фиг. 1, 2). Закрепленные на Г-образных рычагах 26 флажки 27 посредством тарированных пружин 28 поджаты к упорам 29.
На следующем этапе работы стенда силовой цилиндр 23 перемещает каретку 10 с установленным на ней ГММ 11 в крайнее заднее положение до момента установки бугелей 22 ГММ 11 непосредственно под приемными окнами направляющих для схода ракет АПУ 6. В процессе этого перемещения флажки 27 устройства имитации механизма раскрытия аэродинамических рулей ракеты проходят под отбойниками 7 механизма раскрытия аэродинамических рулей ракеты не задевая их. Отбойники 7 занимают положение перед флажками 27 устройства имитации механизма раскрытия аэродинамических рулей ракеты, но по-прежнему располагаются над ними.
После перемещения каретки 10 с установленным на ней ГММ 11 в крайнее заднее положение шатун 16 с рычагами 15 перемещается из положения, показанного на фиг. 1, в положение, показанное на фиг. 3. До момента перемещения шатуна 16 регулируемый толкатель 20 находится в положении когда между ним и торцем ГММ 11 существует определенный зазор. В процессе перемещения шатуна 16 и поворота рычагов 15 происходит поворот эксцентриков 13 из положения в котором наружные поверхности эксцентриков 13 находились в момент установки ГММ 11 на каретку 10 (см. фиг. 1) в положение, при котором эксцентрики 13 контактируют с дном паза соответствующего прилива 12 в точке своей наружной поверхности с наибольшим эксцентриситетом (см. фиг. 3). В результате происходит подъем ГММ 11 над кареткой 10 на величину наибольшего эксцентриситета, заход бугелей 22 в приемные окна направляющих для схода ракет АПУ 6 и установка бугелей 22 над направляющими АПУ 6 с минимальным зазором. Регулируемый толкатель 20 вворачивается в кронштейн 19 до момента его касания с торцем ГММ 11. Вместе с ГММ 11 происходит вертикальное перемещение устройства имитации механизма раскрытия аэродинамических рулей ракеты и отбойники 7 механизма раскрытия аэродинамических рулей ракеты занимают положение на одном уровне с флажками 27 устройства имитации механизма раскрытия аэродинамических рулей ракеты и перед ними (см. фиг. 3, 4).
Затем подается команда на силовой привод 23 и происходит перемещение каретки 10 вместе с ГММ 11 вперед. В самом начале перемещения каретки 10 шатун 16 вместе с рычагами 15 возвращается в первоначальное исходное положение (см. фиг. 1). В результате эксцентрики 13 повернутся в пазах соответствующих приливов 12 таким образом, что наружные поверхности эксцентриков 13 своими точками с наименьшим эксцентриситетом будут направлены в сторону дна паза прилива 12, а между дном пазов и наружными поверхностями эксцентриков 13 в точках с наименьшим эксцентриситетом образуется зазор. При этом выбирается зазор между бугелями 22 ГММ 11 и направляющими для схода ракет АПУ 6 и ГММ 11 повисает всей своей массой на направляющих для схода ракет АПУ 6. Усилие от штока силового привода 23 передается на каретку 10, затем через закрепленный на каретке 10 упор 19 и регулируемый толкатель 20 - на ГММ 11.
При перемещении ГММ 11 его бугеля 22 скользят по направляющим для схода ракет АПУ 6 до момента покидания ГММ 11 направляющих АПУ 6. В процессе покидания ГММ 11 направляющих для схода ракет АПУ 6 происходит постепенный сход бугелей 22 с направляющих АПУ 6. В момент начала схода последнего бугеля 22 с направляющих для схода ракет АПУ 6 отбойники 7 механизма раскрытия аэродинамических рулей ракеты контактируют с флажками 27 устройства имитации механизма раскрытия аэродинамических рулей ракеты. В результате взаимодействия отбойников 7 с флажками 27 происходит поворот вторых концов Г-образных рычагов в направлении от торца ГММ 11 и растяжение тарированных пружин 28 (см. фиг. 6). Пружины 28 создают усилие с которым расположенные на АПУ 6 отбойники 7 воздействуют на расположенный на ракете механизм раскрытия аэродинамических рулей в момент схода ракеты с направляющих АПУ 6. В результате этого взаимодействия происходит износ отбойников 27 и возможное их разрушение под воздействием ударных нагрузок, возникающих в момент начала взаимодействия отбойников 7 и флажков 27.
При дальнейшем перемещении ГММ 11 происходит окончательный сход последнего бугеля 22 с направляющих АПУ 6. В момент окончательного схода ГММ 11 с направляющих АПУ 6 отбойники 7 механизма раскрытия аэродинамических рулей ракеты прекращают воздействовать на флажки 27 устройства имитации механизма раскрытия аэродинамических рулей ракеты и занимают положение за флажками (см. фиг. 7). Под воздействием тарированных пружин 28 происходит поворот вторых концов Г-образных рычагов в направлении к торцу ГММ 11 до момента контакта флажков 27 с упорами 29, выполненными на концах U-образного кронштейна 25. Флажки 27 занимают исходное положение, определяемое упорами 29. Далее эксцентрики 13 вместе с ГММ 11 падают в пазы соответствующих приливов 12 каретки 10. При этом рычаги 15, шатун 16 продолжают занимать первоначальное положение (см. фиг. 1), при котором эксцентрики 13 контактируют своей наружной поверхностью в точке с наименьшим эксцентриситетом с дном паза соответствующего прилива 12. Таким образом ГММ 11 занимает на каретке 10 исходное положение при котором происходила загрузка ГММ 11. Стенд готов для следующего цикла испытаний.
Предложенное устройство имитации механизма раскрытия аэродинамических рулей ракеты конструктивно не связано с опорно-подъемным механизмом ГММ и может быть использовано на стендах для имитации пуска ракет с опорно-подъемными механизмами любых конструкций.
Испытания проводятся в объеме подтверждения заданного техническим заданием ресурса работы объекта испытаний - отбойников механизма раскрытия аэродинамических рулей ракеты.
Таким образом при использовании заявленного стенда имитации пуска ракеты ресурсные испытания отбойников механизма раскрытия аэродинамических рулей ракеты проходят в автоматическом режиме по непрерывному замкнутому циклу «подвеска ракеты на АПУ - сход ракеты с АПУ».
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для имитации пуска авиационной ракеты | 2021 |
|
RU2775956C1 |
| СТЕНД ДЛЯ МНОГОКРАТНОЙ ИМИТАЦИИ ПУСКА АВИАЦИОННОЙ РАКЕТЫ | 2012 |
|
RU2519596C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ СХОДА АВИАЦИОННОЙ РАКЕТЫ | 2012 |
|
RU2511217C1 |
| АВИАЦИОННОЕ ПУСКОВОЕ УСТРОЙСТВО | 2004 |
|
RU2259306C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ПРОВЕРКИ РАСКРЫТИЯ АЭРОДИНАМИЧЕСКОГО РУЛЯ РАКЕТЫ | 2008 |
|
RU2382348C1 |
| АВИАЦИОННОЕ ПУСКОВОЕ УСТРОЙСТВО | 2005 |
|
RU2272981C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ ПРОВЕРКИ РАСКРЫТИЯ РУЛЯ РАКЕТЫ | 2011 |
|
RU2464543C1 |
| СПОСОБ СТАРТА АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ С ВОЗДУШНО-РЕАКТИВНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 2006 |
|
RU2314481C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| ПЛАНЕР КРЫЛАТОЙ РАКЕТЫ | 2004 |
|
RU2287771C2 |
Изобретение относится к области ракетной техники, в частности к устройствам для установки и пуска авиационных ракет, а именно к испытательным стендам, предназначенным для ресурсных испытаний механических узлов авиационных пусковых устройств (далее - АПУ), в частности отбойников механизма раскрытия аэродинамических рулей ракеты. Стенд для имитации пуска авиационной ракеты содержит пространственную раму с жестко закрепленными на ней авиационным пусковым устройством с отбойниками механизма раскрытия аэродинамических рулей ракеты и продольными направляющими, установленную на продольных направляющих каретку, привод перемещения каретки, опорно-подъемный механизм габаритно-массовой модели ракеты. При этом стенд снабжен устройством имитации механизма раскрытия аэродинамических рулей ракеты, выполненным в виде закрепленного своей средней частью на торцевой поверхности габаритно-массовой модели ракеты U-образного кронштейна, двух тарированных пружин и установленных на концах U-образного кронштейна с возможностью поворота двух Г-образных рычагов. Причем на одном конце каждого Г-образного рычага закреплен флажок, предназначенный для взаимодействия с соответствующим отбойником механизма раскрытия аэродинамических рулей ракеты, а другой конец каждого Г-образного рычага подпружинен в сторону торцевой поверхности габаритно-массовой модели ракеты посредством соответствующей тарированной пружины. При этом на концах U-образного кронштейна выполнены упоры, обеспечивающие установку флажков Г-образных рычагов под углом относительно торцевой поверхности габаритно-массовой модели ракеты. Достигаемым техническим результатом от использования предложенного технического решения является расширение технологических возможностей стендов для проведения испытаний АПУ, достигаемое за счет возможности проведения ресурсных испытаний отбойников механизма раскрытия аэродинамических рулей ракеты на любом стенде для испытаний. 10 ил.
Стенд для имитации пуска авиационной ракеты, содержащий пространственную раму с жестко закрепленными на ней авиационным пусковым устройством с отбойниками механизма раскрытия аэродинамических рулей ракеты и продольными направляющими, установленную на продольных направляющих каретку, привод перемещения каретки, опорно-подъемный механизм габаритно-массовой модели ракеты, отличающийся тем, что стенд снабжен устройством имитации механизма раскрытия аэродинамических рулей ракеты, выполненным в виде закрепленного своей средней частью на торцевой поверхности габаритно-массовой модели ракеты U-образного кронштейна, двух тарированных пружин и установленных на концах U-образного кронштейна с возможностью поворота двух Г-образных рычагов, причем на одном конце каждого Г-образного рычага закреплен флажок, предназначенный для взаимодействия с соответствующим отбойником механизма раскрытия аэродинамических рулей ракеты, а другой конец каждого Г-образного рычага подпружинен в сторону торцевой поверхности габаритно-массовой модели ракеты посредством соответствующей тарированной пружины, при этом на концах U-образного кронштейна выполнены упоры, обеспечивающие установку флажков Г-образных рычагов под углом относительно торцевой поверхности габаритно-массовой модели ракеты.
| СТЕНД ДЛЯ МНОГОКРАТНОЙ ИМИТАЦИИ ПУСКА АВИАЦИОННОЙ РАКЕТЫ | 2012 |
|
RU2519596C1 |
| CN 209822119 U, 20.12.2019 | |||
| CN 110397520 A, 01.11.2019 | |||
| Способ получения серы из колчедана и тому подобных материалов | 1933 |
|
SU37699A1 |
| JP S61194000 A, 28.08.1996. | |||

