Область техники, к которой относится изобретение
Изобретение относится к интервенционной системе, содержащей элемент введения, такой как катетер, для введения в объект, блок перемещения, такой как робот, для перемещения элемента введения в объекте, и блок генерирования изображения отслеживания для генерирования изображений отслеживания элемента введения в объекте. Изобретение дополнительно относится к соответствующему интервенционному способу и интервенционной компьютерной программе. Кроме того, изобретение относится к контроллеру, способу управления и компьютерной программе управления для управления пучком излучения блока генерирования изображения отслеживания интервенционной системы.
Уровень техники
В WO 2012/123850 A1 описывается медицинское устройство формирования изображения для обеспечения представления изображения, которое используется для определения положения интервенционного устройства в представляющей интерес области во время интервенционной процедуры. Медицинское устройство формирования изображения выполнено с возможностью получения предварительного прямого анатомического изображения, включающего в себя представляющую интерес область, получения прямого анатомического изображения, включающего в себя представляющую интерес область посредством использования устройства получения прямого изображения, содержащего регулируемый коллиматор и идентификации расположения интервенционного устройства на прямом анатомическом изображении. Медицинское устройство формирования изображения дополнительно выполнено с возможностью регулировки установок коллиматора, основываясь на идентифицированном расположении интервенционного устройства, последующего получения дополнительного прямого анатомического изображения, включающего в себя представляющую интерес область, посредством использования устройства получения прямого изображения при помощи отрегулированного коллиматора и обеспечения представления изображения посредством объединения информации из прямого анатомического изображения и предварительного прямого анатомического изображения.
В WO 2005/009243 A1 описывается рентгеновская установка для генерирования изображений туловища, в которой рентгеновская установка содержит источник рентгеновского излучения, автоматически регулируемый коллиматор для ограничения, локального ослабления и/или фильтрации пучка рентгеновского излучения, детектор рентгеновского излучения и блок обработки данных, который соединен с коллиматором и детектором рентгеновского излучения. Блок обработки данных выполнен с возможностью локализации представляющей интерес области внутри туловища на по меньшей мере первом рентгеновском изображении туловища, переданном детектором рентгеновского излучения, и регулировки коллиматора, так что последующие рентгеновские изображения концентрируются на представляющей интерес области.
Если рентгеновская установка используется для отслеживания перемещения кончика катетера в туловище, т.е., если представляющая интерес область представляет собой перемещающуюся представляющую интерес область, определяемую перемещающимся кончиком катетера, и если это отслеживание выполняется посредством получения последовательности рентгеновских изображений, источник рентгеновского излучения должен облучать относительно большую область туловища, которая соответствует наибольшему расстоянию, на которое кончик катетера может переместиться между последовательными рентгеновскими изображения, чтобы гарантировать, что кончик катетера действительно захватывается рентгеновскими изображениями и может, поэтому, отслеживаться посредством использования рентгеновской установки. Эта относительно большая облучаемая область туловища приводит к относительно большой дозе облучения, приложенной к туловищу. Кроме того, если источник рентгеновского излучения выключается на короткое время, и если источник рентгеновского излучения затем снова включается, расположение кончика катетера неизвестно, так что относительно большая часть туловища должна облучаться рентгеновским излучением, чтобы найти перемещающийся кончик катетера. Это также приводит к относительно большой дозе облучения.
Сущность изобретения
Задачей настоящего изобретения является обеспечение интервенционной системы, содержащей элемент введения, такой как катетер, для введения в объект, блок перемещения, такой как робот, для перемещения элемента введения в объекте и блок генерирования изображения отслеживания для генерирования изображений отслеживания элемента введения в объекте, который позволяет генерировать изображения отслеживания, которые надежно изображают элемент введения, даже если элемент введения перемещается, с уменьшенной дозой облучения. Другой задачей настоящего изобретения является обеспечение соответствующего интервенционного способа и интервенционной компьютерной программы и обеспечение контроллера, способа управления и компьютерной программы управления для управления пучком излучения блока генерирования изображения отслеживания интервенционной системы.
В первом аспекте настоящего изобретения представлена интервенционная система, в которой интервенционная система содержит:
- элемент введения для введения в объект,
- блок перемещения для перемещения элемента введения в объекте,
- блок генерирования изображения отслеживания для генерирования изображений отслеживания элемента введения в объекте, в которой блок генерирования изображения отслеживания содержит источник излучения для излучения пучка излучения для прохождения через объект, детектор излучения для обнаружения пучка излучения после прохождения через объект и контроллер для управления блоком генерирования изображения отслеживания,
в которой блок перемещения выполнен с возможностью обеспечения параметров перемещения, которые определяют перемещение элемента введения в объекте, для блока генерирования изображения отслеживания, и в которой контроллер выполнен с возможностью управления блоком генерирования изображения отслеживания в зависимости от обеспечиваемых параметров перемещения, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения.
Так как блок перемещения выполнен с возможностью обеспечения параметров перемещения, которые определяют перемещение элемента введения в объекте, для блока генерирования изображения отслеживания, блоку генерирования изображения отслеживания известно реальное физическое перемещение элемента введения, которое может использоваться контроллером для управления блоком генерирования изображения отслеживания, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения. Это управление пучком излучения может выполняться очень точно, основываясь на известном реальном физическом перемещении элемента введения, так что нет необходимости облучать относительно большую площадь объекта для гарантирования того, что элемент введения действительно захватывается изображениями отслеживания, таким образом создавая уменьшенную дозу облучения, приложенную к объекту.
Предпочтительно, что параметры перемещения определяют перемещение кончика элемента введения в объекте, причем контроллер выполнен с возможностью управления блоком генерирования изображения отслеживания в зависимости от обеспечиваемых параметров перемещения, так что пучок излучения проходит через область объекта, которая включает в себя кончик элемента введения.
Элемент введения предпочтительно представляет собой катетер, иглу или другой интервенционный инструмент, вводимый в объект, которым является предпочтительно живой объект, такой как человек или животное. Блок перемещения предпочтительно представляет собой робот для перемещения с помощью робота элемента введения в объекте, причем это перемещение с помощью робота может выполняться автоматически или пользователем, таким как врач, который может управлять блоком перемещения посредством блока ввода, такого как клавиатура, джойстик, сенсорный экран, мышь и т.д. Блок генерирования изображения отслеживания предпочтительно выполнен с возможностью генерирования последовательности изображений отслеживания, изображающих элемент введения, когда он перемещается в объекте. Предпочтительно, что блок генерирования изображения отслеживания выполнен с возможностью генерирования рентгеновских изображений, изображающих элемент введения в объекте. Блок генерирования изображения отслеживания, например, представляет собой рентгеновскую установку с C-образной консолью.
Блок генерирования изображения отслеживания предпочтительно содержит коллиматор для коллимирования пучка излучения, причем контроллер выполнен с возможностью управления коллиматором, так что пучок излучения коллимируется в зависимости от обеспечиваемых параметров перемещения, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения. Контроллер может быть выполнен с возможностью управления коллиматором в зависимости от скорости перемещения, определяемой параметрами перемещения, и/или времени реакции интервенционной системы. В частности, контроллер может быть выполнен с возможностью управления коллиматором в зависимости от скорости перемещения, определяемой параметрами перемещения, и/или времени реакции интервенционной системы, так что часть пучка излучения, которая находится перед элементом введения относительно направления перемещения, определяемого параметрами перемещения, увеличивается с увеличением скорости и/или с увеличением времени реакции.
Таким образом, контроллер может быть выполнен с возможностью управления пучком излучения посредством управления коллиматором блока генерирования изображения отслеживания. Однако контроллер также может быть выполнен с возможностью управления другими компонентами блока генерирования изображения отслеживания для управления пучком излучения, такими как источник излучения и детектор излучения блока генерирования изображения отслеживания. Например, контроллер может быть выполнен с возможностью управления положениями этих компонентов для обеспечения требуемого направления пучка излучения.
В предпочтительном варианте осуществления интервенционная система дополнительно содержит блок идентификации для идентификации элемента введения на генерируемых изображениях отслеживания, причем контроллер выполнен с возможностью управления блоком генерирования изображения отслеживания в зависимости от идентификации элемента введения на генерируемых изображениях отслеживания. Таким образом, не только параметры перемещения могут использоваться для управления блоком генерирования изображения отслеживания, но также идентификация элемента введения на генерируемых изображениях отслеживания. Идентификация элемента введения на генерируемых изображениях отслеживания указывает реальное физическое положение элемента введения в объекте. Использование этой информации, касающейся реального физического положения элемента введения в объекте, получаемой из изображений отслеживания, вместе с параметрами перемещения, обеспечиваемыми блоком перемещения, для управления блоком генерирования изображения отслеживания, в частности, пучком излучения, дополнительно повышает качество отслеживания элемента введения посредством использования изображений отслеживания. Например, идентификация элемента введения на изображениях отслеживания может использоваться для управления направлением пучка излучения, например, пучок излучения может управляться так, что элемент введения, в частности кончик элемента введения, располагается по центру изображений отслеживания, причем ширина пучка излучения может управляться в зависимости от параметров перемещения.
Блок идентификации предпочтительно выполнен с возможностью использования известных алгоритмов сегментирования для сегментирования элемента введения на генерируемых изображениях отслеживания, чтобы идентифицировать элемент введения.
Интервенционная система дополнительно может содержать блок определения положения для определения положения элемента введения в объекте, основываясь на параметрах перемещения, в которой контроллер может быть выполнен с возможностью управления блоком генерирования изображения отслеживания в зависимости от определенного положения элемента введения. Кроме того, блок генерирования изображения отслеживания может содержать коллиматор для коллимирования пучка излучения, в которой блок определения положения может быть выполнен с возможностью дополнительного определения значения точности, указывающего точность определения положения, и в которой контроллер может быть выполнен с возможностью управления коллиматором в зависимости от значения точности. Это позволяет управлять блоком генерирования изображения отслеживания во время периода отключения, в которой блок генерирования изображения отслеживания временно не генерирует изображения отслеживания. Если в конце периода отключения блок генерирования изображения отслеживания снова включается, генерируемые изображения отслеживания немедленно изображают элемент введения, даже если элемент введения переместился во время периода отключения.
Предпочтительно, что контроллер выполнен с возможностью управления коллиматором, так что коллиматор имеет более узкое отверстие, если значение точности указывает более высокую точность, и что коллиматор имеет более широкое отверстие, если значение точности указывает меньшую точность. Значение точности может определяться в зависимости, например, от скорости перемещения, определяемой параметрами перемещения, и/или в зависимости от суммарной величины перемещения, определяемой параметрами перемещения во время периода отключения. Суммарная величина перемещения может определяться как равная суммарному расстоянию, на которое элемент введения переместился во время периода отключения.
Интервенционная система дополнительно может содержать a) блок определения положения для определения положения элемента введения в объекте, основываясь на параметрах перемещения, b) блок обеспечения изображения объекта для обеспечения изображения объекта, изображающего объект, и c) устройство отображения для отображения изображения объекта и представления элемента введения в определенном положении элемента введения на изображении объекта. Изображением объекта может быть обзорное изображение, изображающее большую часть объекта. Например, изображение объекта может представлять собой изображение маршрутной карты, изображающее сосудистое дерево человека, причем элемент введения может перемещаться в сосуде сосудистого дерева. Так как положение элемента введения в объекте определяется на основе параметров перемещения, причем представление элемента введения в определенном положении элемента введения на изображении объекта, например, на изображении маршрутной карты, изображается на устройстве отображения, положение элемента введения в объекте может изображаться на устройстве отображения, даже если в настоящий момент не генерируется изображение отслеживания. Например, кончик элемента введения может изображаться на изображении маршрутной карты, даже если изображение отслеживания в настоящий момент не генерируется.
Интервенционная система также может содержать a) блок обеспечения изображения объекта для обеспечения изображения объекта, изображающего объект, b) блок определения изображения наложения для определения изображения наложения, являющегося наложением изображения объекта и целевого изображения, и c) устройство отображения для отображения изображения объекта и изображения отслеживания, наложенных друг на друга. Изображением объекта, например, может быть изображение маршрутной карты, изображающее сосудистое дерево человека. Так как изображение отслеживания изображает элемент введения, посредством отображения изображения объекта и изображения отслеживания, наложенных друг на друга, пользователю может изображаться положение элемента введения в объекте. Также в данном варианте осуществления изображением объекта предпочтительно является обзорное изображение, изображающее большую часть объекта.
В другом аспекте настоящего изобретения представлен контроллер, причем контроллер выполнен с возможностью управления пучком излучения, излучаемым источником излучения блока генерирования изображения отслеживания, в зависимости от параметров перемещения, обеспечиваемых блоком перемещения для перемещения элемента введения в объекте, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения.
В другом аспекте настоящего изобретения представлен интервенционный способ, в котором интервенционный способ содержит:
- перемещение элемента введения в объекте блоком перемещения,
- генерирование изображений отслеживания элемента введения в объекте блоком генерирования изображения отслеживания, в котором пучок излучения для прохождения через объект излучается источником излучения блока генерирования изображения отслеживания, и в котором пучок излучения обнаруживается после прохождения через объект детектором излучения блока генерирования изображения отслеживания,
в котором блок перемещения обеспечивает параметры перемещения, которые определяют перемещение элемента введения в объекте, для блока генерирования изображения отслеживания, и в котором контроллер управляет блоком генерирования изображения отслеживания в зависимости от обеспечиваемых параметров перемещения, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения.
В другом аспекте настоящего изобретения представлен способ управления для управления блоком генерирования изображения отслеживания интервенционной системы, определенной по п.1 формулы изобретения, в котором способ управления содержит управление пучком излучения в зависимости от параметров перемещения, обеспечиваемых блоком перемещения интервенционной системы, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения.
В другом аспекте настоящего изобретения представлена интервенционная компьютерная программа, которая содержит средство программного кода, предписывающее интервенционной системе, определенной по п.1 формулы изобретения, выполнять этапы интервенционного способа, определенного по п.12 формулы изобретения, когда интервенционная компьютерная программа выполняется на компьютере, управляющем интервенционной системой.
В другом аспекте настоящего изобретения представлена компьютерная программа управления для управления пучком излучения блока генерирования изображения отслеживания интервенционной системы, определенной по п.1 формулы изобретения, в которой компьютерная программа управления содержит средство программного кода, предписывающее контроллеру блока генерирования изображения отслеживания выполнять этапы способа управления, определенного по п.13 формулы изобретения, когда компьютерная программа управления выполняется на контроллере.
Необходимо понимать, что интервенционная система по п.1 формулы изобретения, контроллер по п.11 формулы изобретения, интервенционный способ по п.12 формулы изобретения, способ управления по п.13 формулы изобретения, интервенционная компьютерная программа по п.14 формулы изобретения и компьютерная программа управления по п.15 формулы изобретения имеют подобные и/или идентичные предпочтительные варианты осуществления, в частности, определенные в зависимых пунктах формулы изобретения.
Необходимо понимать, что предпочтительный вариант осуществления изобретения также может представлять собой любую комбинацию зависимых пунктов формулы изобретения или вышеупомянутых вариантов осуществления с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения очевидны из и объясняются с ссылкой на варианты осуществления, описанные ниже в данном документе.
Краткое описание чертежей
На нижеследующих чертежах:
Фиг. 1 изображает схематически и в виде примера вариант осуществления интервенционной системы, и
Фиг. 2 изображает блок-схему последовательности операций, иллюстрирующую в виде примера вариант осуществления интервенционного способа.
Подробное описание вариантов осуществления
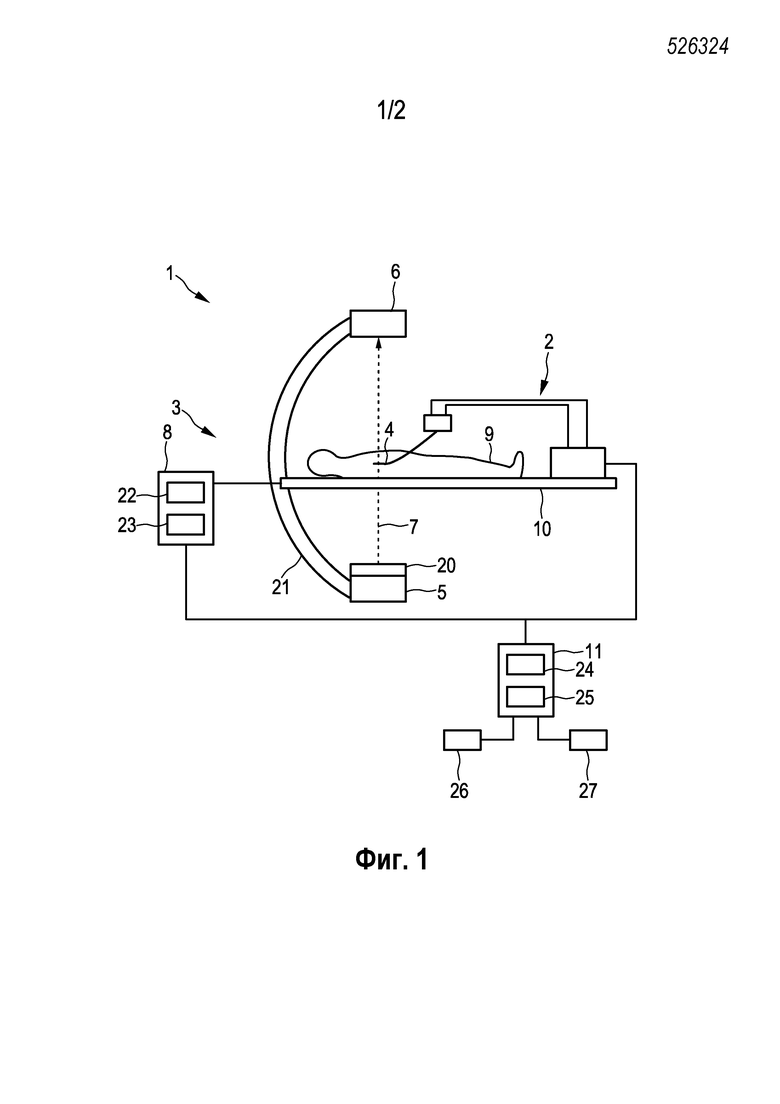
Фиг. 1 изображает схематически и в виде примера вариант осуществления интервенционной системы. В данном варианте осуществления интервенционная система представляет собой катетерную систему 1 для введения катетера 4 в человека 9, лежащего на опорном средстве, таком как стол 10 для пациента.
Катетерная система 1 содержит блок 2 перемещения для перемещения катетера 4 в человеке 9. В данном варианте осуществления блок 2 перемещения представляет собой роботизированный блок для перемещения с помощью робота катетера 4 в человеке 9. Роботизированный блок 2 управляется пользователем, таким как врач, посредством блока 26 ввода. Блок 26 ввода может содержать джойстик, клавиатуру, мышь, сенсорную панель или другое средство, позволяющее пользователю управлять перемещением роботизированного блока 2.
Перемещение, выполняемое роботизированным блоком 2, может описываться параметрами перемещения, которые могут определять последовательность положений катетера 4, в частности кончика катетера 4, в человеке 9, и соответствующими временными отметками, так что для каждого положения известен соответствующий момент времени. Параметры перемещения пересылаются с роботизированного блока 2 на блок 3 генерирования изображения отслеживания.
Блок 3 генерирования изображения отслеживания выполнен с возможностью генерирования нескольких изображений отслеживания, которые соответствуют разным моментам времени, и которые изображают катетер 4, в частности кончик катетера 4, в разных положениях во время перемещения. В данном варианте осуществления блок 3 генерирования изображения отслеживания представляет собой рентгеновскую систему с C-образной консолью, содержащую источник 5 рентгеновского излучения, излучающий пучок 7 рентгеновского излучения для прохождения через человека 9 при помощи катетера 4. Рентгеновская система 3 с C-образной консолью дополнительно содержит детектор 6 рентгеновского излучения для обнаружения пучка 7 излучения после прохождения через человека 9 при помощи катетера 4, и контроллер 8 для управления пучком 7 излучения и для генерирования рентгеновских проекционных изображений, основываясь на излучении, обнаруженном детектором 6 рентгеновского излучения, причем сгенерированные рентгеновские проекционные изображения, т.е. сгенерированные изображения отслеживания, изображают катетер 4, в частности кончик катетера 4, в человеке 9 в разных положениях во время перемещения, т.е. генерируется несколько изображений отслеживания, которые соответствуют разным моментам времени во время перемещения кончика катетера 4 в человеке 9. Изображения могут подаваться на устройство 27 отображения для их изображения.
Блок 3 генерирования изображения отслеживания, т.е. рентгеновская система 3 с C-образной консолью, дополнительно содержит коллиматор 20 для коллимирования пучка 7 излучения, в которой контроллер 8 выполнен с возможностью управления коллиматором 20, так что пучок 7 излучения коллимируется в зависимости от обеспечиваемых параметров перемещения, так что пучок 7 излучения проходит через область человека 9, которая включает в себя катетер 4, в частности кончик катетера 4. Например, контроллер 8 может быть выполнен с возможностью управления коллиматором 20 в зависимости от скорости перемещения, определяемой параметрами перемещения, и/или времени реакции интервенционной системы. В частности, контроллер 8 может быть выполнен с возможностью управления коллиматором 20 в зависимости от скорости перемещения, определяемой параметрами перемещения, и времени реакции интервенционной системы 1, так что часть пучка 7 излучения, которая находится перед кончиком катетера 4 относительно направления перемещения, определенного параметрами перемещения, увеличивается с увеличением скорости и с увеличением времени реакции. Часть пучка излучения перед кончиком катетера 4 относительно направления перемещения, определенного параметрами перемещения, может рассматриваться как определяющая запас надежности. Так как параметры перемещения используются для управления запасом надежности, запас надежности может быть меньше запаса надежности, который должен использоваться блоком генерирования изображения отслеживания со стандартным методом жесткого коллимирования, как описано в вышеупомянутом патентном документе WO 2005/009243 A1. Запас надежности, т.е. в данном примере часть пучка излучения перед кончиком катетера 4 относительно направления перемещения, определенного параметрами перемещения, может определяться следующим уравнением:

в котором S представляет запас надежности перед кончиком катетера 4, v представляет скорость по направлению перемещения, т.е. соответствующее заданное значение скорости роботизированного блока 2, и tr представляет время реакции интервенционной системы.
Запас S надежности и скорость v связаны с величинами на изображениях отслеживания, т.е. S представляет собой длину перед кончиком катетера по направлению перемещения, и v представляет собой скорость роботизированного блока, определенная параметрами перемещения относительно опорного кадра изображения, определенного изображениями отслеживания, причем параметры перемещения, т.е. скорость v, определенная параметрами перемещения, была преобразована так, чтобы соответствовать опорному кадру изображения. Преобразование, которое может использоваться для преобразования параметров перемещения в опорный кадр изображения, дополнительно описывается ниже.
Время реакции интервенционной системы предпочтительно определяется как время между действием перемещения элемента введения в человеке 9 и управлением пучком излучения при реакции действия перемещения. Это время реакции зависит, например, от задержки между блоком перемещения и контроллером, времени, необходимым коллиматору для реагирования на входные сигналы от контроллера, и т.д.
Блок 23 идентификации может идентифицировать катетер 4 на сгенерированном изображении отслеживания, и контроллер 8 может управлять пучком 7 излучения, так что идентифицированный катетер 4 располагается по центру или в другом положении на изображении отслеживания. Блок 23 идентификации может использовать известные алгоритмы сегментирования для идентификации катетера 4 на изображениях отслеживания. Коллимирование, т.е. ширина пучка 7 излучения, может определяться на основе параметров перемещения, например, основываясь на скорости перемещения, определяемой параметрами перемещения, как описано выше.
Интервенционная система дополнительно может содержать блок 22 определения положения для определения положения катетера 4, в частности кончика катетера 4, в человеке 9, основываясь на параметрах перемещения, причем блок 22 определения положения может быть выполнен с возможностью дополнительного определения значения точности, указывающего точность определения положения. Это определенное положение и значение точности предпочтительно используются для управления блоком 3 генерирования изображения отслеживания, если блок 3 генерирования изображения отслеживания временно не генерирует изображения отслеживания, т.е. если блок 3 генерирования изображения отслеживания находится в периоде отключения. Это управление предпочтительно выполняется так, что, если снова начинается генерирование изображений отслеживания, изображения отслеживания немедленно изображают кончик катетера 4. Кроме того, управление предпочтительно выполняется так, что коллиматор 20 имеет более узкое отверстие, если значение точности указывает более высокую точность, и что коллиматор 20 имеет более широкое отверстие, если значение точности указывает меньшую точностью. Блок 22 определения положения предпочтительно выполнен с возможностью определения значения точности в зависимости от скорости перемещения, определяемой параметрами перемещения во время периода отключения, и/или суммарной величины перемещения, определяемой параметрами перемещения во время периода отключения, причем с увеличением скорости и/или увеличением суммарной величины перемещения, соответственно, уменьшается значение точности. Значение точности также может быть функцией времени отключения, причем с увеличением времени отключения может уменьшаться значение точности. Значение точности также может зависеть от результатов этапов калибровки, выполняемых для калибровки интервенционной системы. Например, во время процедуры калибровки точность определения положения элемента введения в объекте, основанная на параметрах перемещения, может определяться посредством определения данного положения несколько раз, основываясь на одних и тех же параметрах перемещения, причем точность может оцениваться в зависимости от результирующего распределения определенных положений. Например, значение точности может определяться в зависимости от среднеквадратичного отклонения данного распределения.
Таким образом, интервенционная система позволяет выполнять оценку расположения катетера 4, даже если источник 5 рентгеновского излучения выключен. Расположение катетера 4 может определяться на основе перемещения, определяемого параметрами перемещения, и на основе известного расположения катетера, из которого был перемещен катетер 4. Это известное расположение может представлять собой расположение, которое было определено посредством использования изображения отслеживания и посредством идентификации катетера 4 на изображении отслеживания. Если источник 5 рентгеновского излучения временно отключается, это расположение катетера 4, определенное посредством использования параметров перемещения, может использоваться для управления компонентами блока 3 генерирования изображения отслеживания, определяя направление и форму пучка излучения, подобных коллиматору 20, так что они придерживаются оцененного расположения катетера 4. Если затем источник 5 рентгеновского излучения снова включается, изображение отслеживания захватывает катетер 4 уже очень хорошо, причем захват катетера 4 затем может уточняться на основе сгенерированного изображения отслеживания.
В данном варианте осуществления контроллер 8 содержит блок 22 определения положения и блок 23 идентификации. Однако в другом варианте осуществления эти блоки также могут располагаться в другой части интервенционной системы 1, например, в другом блоке обработки, таком как блок 11 обработки, который в данном варианте осуществления содержит блок 24 обеспечения изображения объекта для обеспечения изображения объекта, изображающего человека 9. Блок 24 обеспечения изображения объекта выполнен с возможностью обеспечения обзорного изображения, предпочтительно включающего в себя информацию о маршрутной карте, изображающей сосуды, вдоль которых катетер 4 может перемещаться в человеке 9. Блок 24 обеспечения изображения объекта, поэтому, предпочтительно выполнен с возможностью обеспечения изображения маршрутной карты. Изображение маршрутной карты может изображаться вместе с представлением кончика катетера 4 в положении, определяемом блоком 22 определения положения, на устройстве 27 отображения, позволяя пользователю, такому как врач, знать положение кончика катетера 4 в человеке 9, даже если блок 3 генерирования изображения отслеживания не обеспечивает фактические изображения отслеживания, потому что, например, выключен источник 5 излучения. Представление, изображаемое на устройстве 27 отображения в определенном положении кончика катетера 4, может иметь форму проекции кончика катетера 4, или оно может иметь другую форму. Например, она может быть круглой, квадратной и т.д. Катетер, поэтому, может вписываться в обеспечиваемое изображение объекта или искусственно прорисовываться в нем.
Обеспечиваемое изображение объекта предпочтительно представляет собой обзорное изображение, которое гарантирует, что пользователь сохраняет восприятие окружающего пространства. Оно может представлять собой предварительно полученное изображение, которое может быть сгенерировано блоком 3 генерирования изображения отслеживания или другим устройством генерирования изображения, таким как устройство формирования изображения с помощью компьютерной томографии, устройство формирования изображения с помощью магнитного резонанса и т.д. Если изображением объекта является предварительно полученное изображение, которое было сгенерировано блоком 3 генерирования изображения отслеживания, им может быть снимок или киноизображение или флуоресцентное изображение. Снимок или киноизображение обычно генерируется посредством использования более высокой дозы рентгеновского излучения, после того как контрастное вещество было введено в человека, чтобы генерировать малошумное изображение, изображающее, например, сосудистое дерево. Флуоресцентное изображение представляет собой более шумное изображение меньшей дозы. Снимок или киноизображение является предпочтительным по сравнению с флуоресцентным изображением из-за уменьшенного шума.
Интервенционная система дополнительно содержит блок 25 определения изображения наложения для определения изображения наложения, являющегося наложением изображения объекта и целевого изображения. Так как катетер 4 изображается на целевом изображении, посредством показа изображения наложения, состоящего из изображения объекта, которым предпочтительно является обзорное изображении, изображающее окружающее пространство, и целевого изображения, изображающего катетер 4, положение катетера 4 относительно окружающего пространства в человеке 9 может быть показано пользователю.
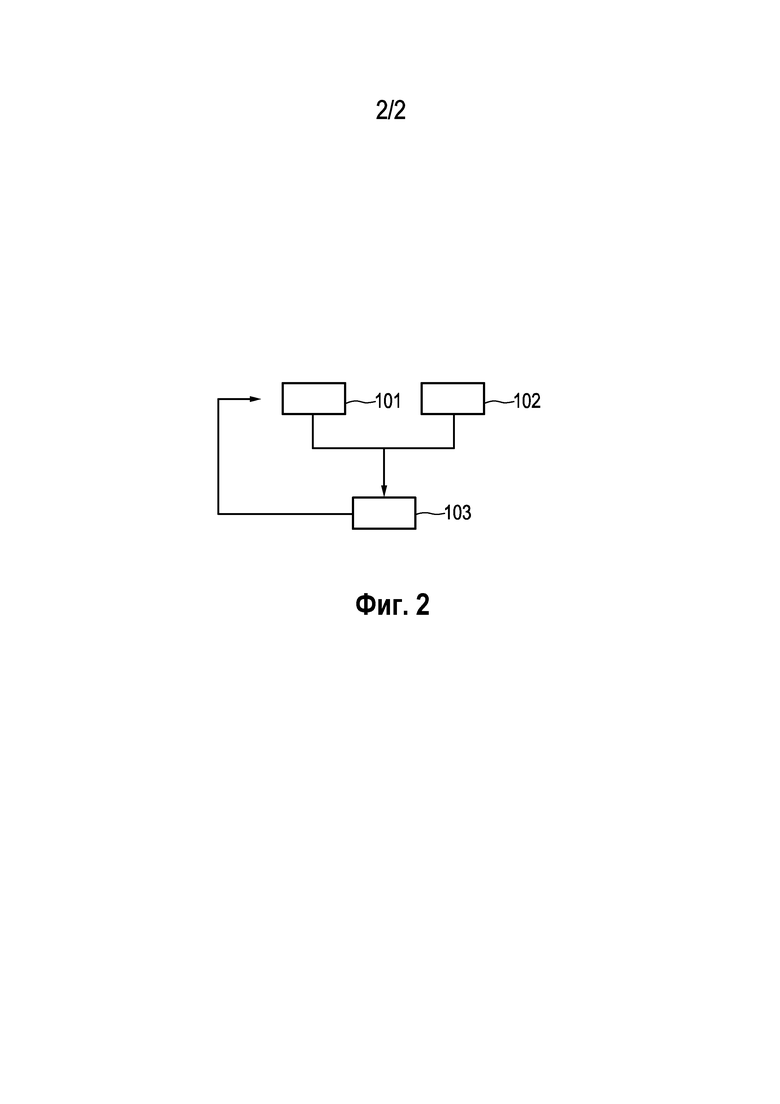
В нижеследующем вариант осуществления интервенционного способа описывается в виде примера с ссылкой на блок-схему последовательности операций, показанную на Фиг. 2.
На этапе 101 элемент 4 введения, который вводится в объект 9, перемещается посредством использования блока 2 перемещения. В частности, катетер 4 перемещается в человеке 9 посредством использования роботизированного блока 2 в соответствии с вводом в роботизированный блок 2, обеспечиваемым пользователем при помощи блока 27 ввода.
На этапе 102 во время перемещения элемента 4 введения в объекте 9 генерируются изображения отслеживания элемента 4 введения в объекте 9 блоком 3 генерирования изображения отслеживания, причем пучок 7 излучения для прохождения через объект 9 излучается источником 5 излучения блока 3 генерирования изображения отслеживания, и пучок 7 излучения обнаруживается после прохождения через объект 9 посредством детектора 6 излучения блока 3 генерирования изображения отслеживания для генерирования изображения отслеживания.
На этапе 103 пучок 7 излучения управляется контроллером 8, в котором блок 2 перемещения обеспечивает параметры перемещения, которые определяют перемещение элемента 4 введения в объекте 9, для блока 3 генерирования изображения отслеживания, и в котором контроллер 8 управляет пучком 7 излучения в зависимости от обеспечиваемых параметров перемещения, так что пучок 7 излучения проходит через область объекта 9, которая включает в себя элемент 4 введения.
Предпочтительно, что на этапе 103 контроллер управляет пучком 7 излучения также в зависимости от положения элемента 4 введения на изображении отслеживания, генерируемом на этапе 102. Этапы 101-103 предпочтительно выполняются в цикле, причем контроллер 8 управляет пучком 7 излучения, так что элемент 4 введения, в частности кончик элемента 4 введения, располагается по центру на изображениях отслеживания, и так что коллимирование, т.е. ширина, пучка 7 излучения определяется в зависимости от параметров перемещения, принимаемых от блока 2 перемещения.
Процедура в соответствии с этапом 103 может рассматриваться как определяющая способ управления для управления пучком излучения блока генерирования изображения отслеживания интервенционной системы, причем способ управления содержит управление пучком излучения в зависимости от параметров перемещения, обеспечиваемых блоком перемещения интервенционной системы, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения.
Минимизирование дозы излучения как для персонала, так и для пациента для данной клинической процедуры является конкурентным вопросом в интервенционных рентгеновских процедурах. Чтобы уменьшить эти дозы облучения, вышеупомянутый патентный документ WO 2005/009243 A1 описывает метод жесткого коллимирования, который автоматически обнаруживает относящиеся, представляющие интерес области (ROI) в технических изображениях, и который пытается максимально возможно ограничить протяженность пучка рентгеновского излучения только до ROI. Посредством использования этого метода жесткого коллимирования произведение дозы и площади может быть уменьшено посредством уменьшения облучаемой площади. Метод жесткого коллимирования использует алгоритмы анализа изображения для определения клинически подходящих ROI на любом этапе интервенционной процедуры. Алгоритмы анализа изображения могут дополнительно выполнены с возможностью определения запасов надежности вокруг клинически подходящих ROI, чтобы принять во внимание внезапные перемещения интервенционного инструмента, такого как катетер, например, из-за внезапных перемещений, выполняемых врачом.
Если будет использоваться метод жесткого коллимирования без учета параметров перемещения, обеспечиваемых блоком 2 перемещения, как описано в вышеупомянутом патентном документе, запас надежности должен быть больше наибольшего расстояния, на которое элемент введения может передвинуться между последовательными кадрами, т.е. между последовательными изображениями отслеживания, генерируемыми блоком 3 генерирования изображения отслеживания. Соответствующая область может быть относительно большой, например, она может охватывать площадь, которая до пяти раз больше, чем площадь клинически подходящего ROI. Это приведет к относительно большой дозе облучения, даже если используется метод жесткого коллимирования. Кроме того, если метод жесткого коллимирования будет использоваться без учета параметров перемещения, обеспечиваемых блоком 2 перемещения, и если источник рентгеновского излучения будет выключаться мгновенно, интервенционная система не будет знать, в какое расположение переместился катетер, и, таким образом, интервенционной системе будет необходимо управлять коллиматором так, чтобы его шторки открылись полностью, чтобы повторно захватить элемент введения при возобновлении процесса рентгеноскопии, т.е. при возобновлении генерирования нескольких изображений отслеживания, для отслеживания элемента введения в человеке. Интервенционная система, описанная выше с ссылкой на Фиг. 1, поэтому, выполнена с возможностью использования информации о перемещении от роботизированного блока 2, чтобы способствовать отслеживанию элемента введения с жестким коллимированием.
Параметры перемещения, которые могут определять информацию о поступательном перемещении, может передаваться от роботизированного блока 2 на блок 3 генерирования изображения отслеживания по проводному или беспроводному соединению для передачи данных. Кроме параметров перемещения также другая информация может передаваться от роботизированного блока 2 на блок 3 генерирования изображения отслеживания или на блок 11 обработки, такая как тип катетера, перемещаемого блоком 2 перемещения. Тип катетера может указывать фактическую фазу интервенционной процедуры, выполняемой интервенционной системой. Передаваемые параметры перемещения могут включать в себя информацию о форме и вместе с ней ориентацию катетера, т.е. параметры перемещения могут включать в себя информацию о направлении, по которому направлен катетер. Это направление представляет собой направление перемещения, по которому фактически перемещается катетер.
Так как может быть некоторая задержка в полных цепочках линий связи, катетерная система предпочтительно выполнена с возможностью синхронизации информации об изображении, обеспечиваемой изображениями отслеживания, и параметров перемещения, т.е. информации о перемещении, обеспечиваемой роботизированным блоком 2. Эта синхронизация является важной, чтобы дать возможность контроллеру 8 получить сведения, какое изображение соответствует какому реальному физическому перемещению, определенному параметрами перемещения, или какому реальному физическому положению катетера, в частности какому реальному физическому положению кончика катетера, определяемому параметрами перемещения. Предпочтительно, что контроллер 8 использует моменты времени, назначенные последовательности реальных физических положений кончика катетера 4, определенным параметрами перемещения, принятыми от роботизированного блока 2, и моменты времени, в которые были получены сгенерированные изображения отслеживания, изображающие кончик катетера 4 во время перемещения, для синхронизации реальных физических положений кончика катетера 4, определенных параметрами перемещения, обеспечиваемыми роботизированным блоком 2, с моментами времени захвата сгенерированных изображений отслеживания. Таким образом, может быть известно, какие наборы данных принадлежат друг другу.
Роботизированным блоком 2 может быть, например, CorPath 200 компании Corindus, система Magalan компании Hansen Medical или другой роботизированный блок, который может использоваться для перемещения элемента введения, такого как катетер, в объекте, причем соответствующий роботизированный блок выполнен с возможностью обеспечения параметров перемещения для блока 3 генерирования изображения отслеживания. Роботизированный блок может быт выполнен с возможностью предоставления возможности пользователю, например, врачу, управлять элементом управления, например, при помощи джойстика из-за свинцового экрана, чтобы уменьшить дозу облучения, принимаемую пользователем.
Контроллер 8 может быть выполнен с возможностью преобразования параметров перемещения, получаемых от роботизированного блока 2, из опорного кадра робота, определяемого роботизированным блоком 2, в опорный кадр изображения, определяемый блоком 3 генерирования изображения отслеживания. Для выполнения этого преобразования должны быть определены соответствующие плавила преобразования, которые связывают опорный кадр робота с опорным кадром изображения. Эти правила преобразования могут определяться, например, процедурой калибровки, при которой определяются положения и расстояния на изображениях отслеживания, т.е. в опорном кадре изображения, когда известны соответствующие положения и/или расстояния в опорном кадре робота. Эта калибровка может выполняться предпроцедурно, т.е. перед выполнением интервенционной процедуры, или во время интервенционной процедуры, причем в последнем случае перемещения катетера, вводимые пользователем в роботизированный блок 2, т.е. соответствующие положения и/или расстояния в опорном кадре робота, непрерывно приводятся в соответствие с соответствующими изменениями, видимыми на изображениях отслеживания. После того как параметры перемещения будут перенесены из опорного кадра робота на опорный кадр изображения, вышеописанные определения или вычисления, выполняемые контроллером 8, которые выполняются для управления пучком излучения в зависимости от параметров перемещения и в зависимости от идентифицируемого элемента введения, идентифицируемого на изображениях отслеживания, могут выполняться в опорном кадре изображения.
Ввод от роботизированного блока 2, т.е. параметры перемещения, обеспечиваемые для блока 3 генерирования изображения отслеживания, может использоваться контроллером 8 для управления компонентами, определяющими направление и коллимирование пучка излучения, если выключается источник 5 излучения. Это дает возможность, например, коллиматору, в частности одной или нескольким шторкам коллиматора, начинать двигаться в правильном направлении в соответствии с перемещением, определенным параметрами перемещения, перед тем как источник 5 излучения снова включится для получения изображения отслеживания, таким образом уменьшая время реакции интервенционной системы, которое, в свою очередь, может использоваться для уменьшения запаса надежности в соответствии, например, с уравнением (1).
Коллиматором 20 может быть стандартный коллиматор, в частности, стандартный симметричный коллиматор, используемый в современных рентгеновских системах с C-образной консолью. Однако коллиматором также может быть более сложный коллиматор, который позволяет выполнять более гибкое управление. Например, коллиматором может быть многолепестковый коллиматор, который может содержать многочисленные, независимо располагаемые лепестки.
Хотя в вышеописанных вариантах осуществления контроллер выполнен с возможностью управления блоком генерирования изображения отслеживания, так что кончик элемента введения располагается по центру на изображениях отслеживания, в других вариантах осуществления блок генерирования изображения отслеживания может управляться так, что кончик элемента введения показывается в другом положении на изображениях отслеживания. Например, блок генерирования изображения отслеживания может управляться так, что перед кончиком элемента введения, т.е. по направлению перемещения элемента введения в опорном кадре изображения, определенном преобразованными параметрами перемещения, которые были преобразованы для опорного кадра изображения, пространство на изображениях отслеживания больше чем за кончиком элемента введения, т.е. больше, чем пространство в противоположном направлении, так как является более важным для пользователя, такого как врач, иметь визуализацию пространства, в котором перемещается кончик элемента введения, чем иметь визуализацию пространства, из которого переместился кончик элемента введения.
Хотя в вышеописанных вариантах осуществления блок генерирования изображения отслеживания представляет собой рентгеновскую систему с C-образной консолью, в других вариантах осуществления блоком генерирования изображения отслеживания также может быть другое устройство для генерирования изображений отслеживания, которое содержит источник излучения для генерирования излучения, проходящего через объект, детектор излучения для обнаружения излучения, после того как оно пройдет через объект, и контроллер для управления блоком генерирования изображения отслеживания в зависимости от параметров перемещения, принятых от блока перемещения, для перемещения элемента введения в объекте.
Хотя в вышеописанных вариантах осуществления интервенционная система представляет собой катетерную систему, в других вариантах осуществления интервенционной системой также может быть другая система, выполненная с возможностью выполнения интервенционной процедуры, в которой интервенционный инструмент вводится в объект в качестве элемента введения. Например, вместо катетера может использоваться игла в качестве интервенционного инструмента. В частности, интервенционной системой может быть любая интервенционная рентгеновская система.
Другие изменения описанных вариантов осуществления могут быть понятны и осуществлены специалистом в данной области техники при осуществлении на практике заявленного изобретения из изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и неопределенный артикль «a» или «an» не исключает множественность.
Единственный блок или устройство может выполнять функции нескольких элементов, изложенных в формуле изобретения. Простой факт, что некоторые меры излагаются во взаимно разных зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер не может использоваться для получения преимущества.
Операции, такие как управление пучком излучения в зависимости от обеспечиваемых параметров перемещения, определение положения элемента введения в объекте, основываясь на параметрах перемещения, определение значения точности, указывающего точность определения положения элемента введения, идентификация элемента введения на сгенерированных изображениях отслеживания и т.д., выполняемых одним или несколькими блоками или устройствами, могут выполняться любым другим количеством блоков или устройств. Эти операции и/или управление интервенционной системой в соответствии с интервенционным способом и/или управление пучком излучения контроллером в соответствии со способом управления могут быть реализованы в виде средства программного кода компьютерной программы и/или в виде специализированного аппаратного обеспечения.
Компьютерная программа может храниться/распределяться на подходящем носителе, таком как оптическая запоминающая среда или твердотельная среда, поставляемая вместе с другим аппаратным обеспечением или как часть его, но также может распределяться другими видами, такими как при помощи Интернета или других проводных или беспроводных систем связи.
Любые ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие объем.
Изобретение относится к интервенционной системе, содержащей элемент введения, такой как катетер, для введения в объект, например, человека. Блок перемещения, такой как робот, перемещает элемент введения в объекте, в которой блок генерирования изображения отслеживания генерирует изображения отслеживания элемента введения в объекте, и в которой контроллер управляет блоком генерирования изображения отслеживания в зависимости от параметров перемещения блока перемещения, которые указывают перемещение, так что изображения отслеживания показывают элемент введения. Это управление может выполняться очень точно, основываясь на известном реальном физическом перемещении элемента введения, так что нет необходимости, например, облучать относительно большую площадь объекта для гарантирования того, что элемент введения действительно захватывается изображениями отслеживания, таким образом позволяя получить уменьшенную дозу облучения, приложенную к объекту.
Группа изобретений относится к интервенционным средствам для введения в объект. Система содержит элемент введения в объект, блок перемещения элемента введения в объекте, блок генерирования изображения отслеживания элемента введения в объекте, в которой блок генерирования изображения отслеживания содержит источник излучения пучка излучения для прохождения через объект, детектор излучения для обнаружения пучка излучения после прохождения через объект и контроллер для управления блоком генерирования изображения отслеживания, в которой блок перемещения выполнен с возможностью обеспечения параметров перемещения, которые определяют перемещение элемента введения в объекте, для блока генерирования изображения отслеживания и в которой контроллер выполнен с возможностью управления блоком генерирования изображения отслеживания в зависимости от обеспечиваемых параметров перемещения, так что пучок излучения проходит через область объекта, которая включает в себя элемент введения. Контроллер интервенционной системы выполнен с возможностью управления пучком излучения, излучаемым источником излучения блока генерирования изображения отслеживания в зависимости от параметров перемещения, обеспечиваемых блоком перемещения. Интервенционный способ и способ управления блоком генерирования изображения отслеживания осуществляются посредством системы. При этом используются машиночитаемые носители для интервенционного способа и управления блоком генерирования изображения. Использование изобретений позволяет уменьшить дозу облучения при генерировании изображений. 6 н. и 9 з.п. ф-лы, 2 ил.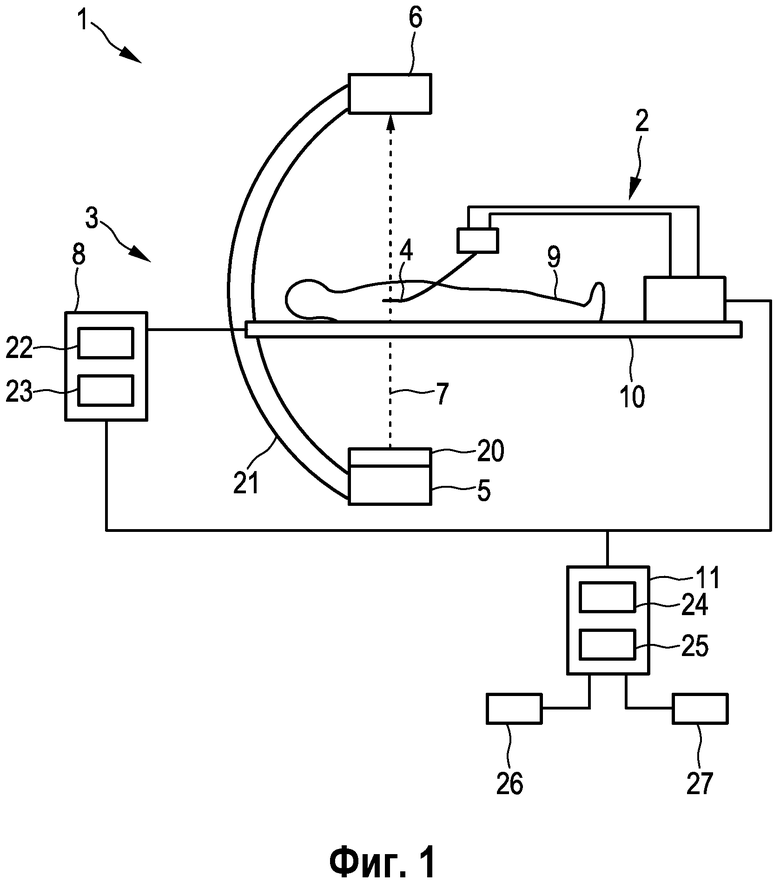
1. Интервенционная система, содержащая:
- элемент (4) введения для введения в объект (9),
- блок (2) перемещения для перемещения элемента (4) введения в объекте (9),
- блок (3) генерирования изображения отслеживания для генерирования изображений отслеживания элемента (4) введения в объекте (9), в которой блок (3) генерирования изображения отслеживания содержит источник (5) излучения для излучения пучка (7) излучения для прохождения через объект (9), детектор (6) излучения для обнаружения пучка (7) излучения после прохождения через объект (9) и контроллер (8) для управления блоком (3) генерирования изображения отслеживания,
в которой блок (2) перемещения выполнен с возможностью обеспечения параметров перемещения, которые определяют перемещение элемента (4) введения в объекте (9), для блока (3) генерирования изображения отслеживания и в которой контроллер (8) выполнен с возможностью управления блоком (3) генерирования изображения отслеживания в зависимости от обеспечиваемых параметров перемещения, так что пучок (7) излучения проходит через область объекта (9), которая включает в себя элемент (4) введения.
2. Интервенционная система по п.1, в которой блок (3) генерирования изображения отслеживания содержит коллиматор (20) для коллимирования пучка (7) излучения и в которой контроллер (8) выполнен с возможностью управления коллиматором (20), так что пучок (7) излучения коллимируется в зависимости от обеспечиваемых параметров перемещения, так что пучок (7) излучения проходит через область объекта (9), которая включает в себя элемент (4) введения.
3. Интервенционная система по п.2, в которой контроллер (8) выполнен с возможностью управления коллиматором (20) в зависимости от скорости перемещения, определяемой параметрами перемещения, и/или времени реакции интервенционной системы (1).
4. Интервенционная система по п.3, в которой контроллер (8) выполнен с возможностью управления коллиматором (20) в зависимости от скорости перемещения, определяемой параметрами перемещения, и/или времени реакции интервенционной системы (1), так что часть пучка (7) излучения, которая находится перед элементом (4) введения относительно направления перемещения, определяемого параметрами перемещения, увеличивается с увеличением скорости и/или с увеличением времени реакции.
5. Интервенционная система по п.2, в которой интервенционная система (1) дополнительно содержит блок (22) определения положения для определения положения элемента (4) введения в объекте (9), основываясь на параметрах перемещения, в которой контроллер (8) выполнен с возможностью управления блоком (3) генерирования изображения отслеживания в зависимости от определенного положения элемента (4) введения.
6. Интервенционная система по п.5, в которой блок (3) генерирования изображения отслеживания содержит коллиматор (20) для коллимирования пучка (7) излучения, в которой блок (22) определения положения выполнен с возможностью дополнительного определения значения точности, указывающего точность определения положения, и в которой контроллер (8) выполнен с возможностью управления коллиматором (20) в зависимости от значения точности.
7. Интервенционная система по п.6, в которой контроллер (8) выполнен с возможностью управления коллиматором (20), так что коллиматор (20) имеет более узкое отверстие, если значение точности указывает более высокую точность, и что коллиматор (20) имеет более широкое отверстие, если значение точности указывает меньшую точность.
8. Интервенционная система по п.1, в которой интервенционная система (1) дополнительно содержит блок (23) идентификации для идентификации элемента (4) введения на сгенерированных изображениях отслеживания, в которой контроллер (8) выполнен с возможностью управления блоком (3) генерирования изображения отслеживания в зависимости от идентификации элемента (4) введения на сгенерированных изображениях отслеживания.
9. Интервенционная система по п.1, в которой интервенционная система (1) дополнительно содержит:
- блок (22) определения положения для определения положения элемента (4) введения в объекте (9), основываясь на параметрах перемещения,
- блок (24) обеспечения изображения объекта для обеспечения изображения объекта, изображающего объект (9),
- устройство (27) отображения для отображения изображения объекта и представления элемента (4) введения в определенном положении элемента (4) введения на изображении объекта.
10. Интервенционная система по п.1, в которой интервенционная система (1) дополнительно содержит:
- блок обеспечения изображения объекта для обеспечения изображения объекта, изображающего объект (9),
- блок (25) определения изображения наложения для определения изображения наложения, являющегося наложением изображения объекта и целевого изображения,
- устройство (27) отображения для отображения изображения объекта и изображения отслеживания, наложенных друг на друга.
11. Контроллер интервенционной системы, выполненный с возможностью управления пучком (7) излучения, излучаемым источником (5) излучения блока (3) генерирования изображения отслеживания в зависимости от параметров перемещения, обеспечиваемых блоком (2) перемещения для перемещения элемента введения в объекте (9), так что пучок (7) излучения проходит через область объекта (9), которая включает в себя элемент (4) введения.
12. Интервенционный способ, содержащий:
- перемещение элемента (4) введения в объекте (9) блоком (2) перемещения,
- генерирование изображений отслеживания элемента (4) введения в объекте (9) блоком (3) генерирования изображения отслеживания, в котором пучок (7) излучения для прохождения через объект (9) излучается источником (5) излучения блока (3) генерирования изображения отслеживания и пучок (7) излучения обнаруживается после прохождения через объект (9) детектором (6) излучения блока (3) генерирования изображения отслеживания,
в котором блок (2) перемещения обеспечивает параметры перемещения, которые определяют перемещение элемента (4) введения в объекте (9), для блока (3) генерирования изображения отслеживания и в котором контроллер (8) управляет блоком (3) генерирования изображения отслеживания в зависимости от обеспечиваемых параметров перемещения, так что пучок (7) излучения проходит через область объекта (9), которая включает в себя элемент (4) введения.
13. Способ управления для управления блоком генерирования изображения отслеживания интервенционной системы по п.1, причем способ управления содержит управление блоком (3) генерирования изображения отслеживания в зависимости от параметров перемещения, обеспечиваемых блоком (2) перемещения интервенционной системы (1), так что пучок (7) излучения проходит через область объекта (9), которая включает в себя элемент (4) введения.
14. Машиночитаемый носитель для интервенционного способа , имеющий компьютерную программу, содержащую средство программного кода, предписывающее интервенционной системе (1) по п.1 выполнять этапы интервенционного способа по п.12, когда средство программного кода выполняется на компьютере, управляющем интервенционной системой (1).
15. Машиночитаемый носитель для управления блоком генерирования изображения отслеживания интервенционной системы по п.1, причем машиночитаемый носитель содержит средство программного кода, предписывающее контроллеру (8) блока генерирования изображения отслеживания выполнять этапы способа управления по п.13, когда средство программного кода выполняется на контроллере (8).
| WO 2012123850 A1, 20.09.2012 | |||
| JP 2008018172 A, 31.01.2008 | |||
| US 2010274120 A1, 28.10.2010 | |||
| WO 2012077011 A1, 14.06.2012 | |||
| СПОСОБ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ГОЛОВНОГО МОЗГА, УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ГОЛОВНОГО МОЗГА И СПОСОБ ИЗМЕРЕНИЯ ПОДЭЛЕКТРОДНОГО СОПРОТИВЛЕНИЯ | 2003 |
|
RU2252692C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ АРТЕРИЙ НИЖНИХ КОНЕЧНОСТЕЙ МЕТОДОМ МАГНИТНО-РЕЗОНАНСНОЙ АНГИОГРАФИИ | 2000 |
|
RU2166909C1 |

