ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к визуализации на основе излучения и, в частности к устройству управления, способу управления, системе визуализации, компьютерному программному элементу и к машиночитаемому носителю.
УРОВЕНЬ ТЕХНИКИ
Подходящее коллимирование рентгеновского пучка является важным, когда используют устройство рентгеновской визуализации.
Коллимирование рентгеновского пучка на релевантную анатомическую структуру снижает количество ионизирующего излучения, которому подвергается пациент и, таким образом, минимизирует риски облучения. Кроме того, подходящее коллимирование снижает количество рассеянного излучения, поскольку облучают меньший объем, результатом чего является улучшенный контраст деталей и качество изображения.
Для получения, например, рентгенограммы грудной клетки, для существующего потока операций коллимирования необходим техник-лаборант для того, чтобы сопровождать пациента к рентгеновскому детектору устройства визуализации и для того, чтобы регулировать детектор и рентгеновскую трубку до подходящей высоты и корректировать настройки коллиматора. Затем техник покидает помещение для исследования и выполняет рентгеновское экспонирование. Измерения времени показали, что приблизительно 1/3 времени сеанса визуализации занимает подходящее расположение пациента и системы, включая коллимирование.
В US 7494276 описана система помощи оператору при работе с рентгеновским устройством.
В US 2009/0285357, являющейся ближайшим уровнем техники, раскрыта автоматическая система позиционирования пациента для радиографического аппарата, включающего систему трехмерной визуализации для оптического сканирования пациента.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Следовательно, существует потребность в альтернативном устройстве для того, чтобы облегчать нагрузку медицинского персонала при регулировке устройств визуализации или при подготовке или во время сеанса или цикла получения изображения.
Цель настоящего изобретения достигают посредством объекта изобретения из независимых пунктов формулы изобретения, где дополнительные варианты осуществления включены в зависимые пункты формулы изобретения. Понятно, что следующий аспект изобретения в равной мере применим к способу управления, системе визуализации, компьютерному программному элементу и машиночитаемому носителю.
Согласно первому аспекту изобретения предложено устройство регулирования устройства рентгеновской визуализации, которое содержит:
порт ввода для приема данных трехмерного изображения, полученных с помощью датчика при трехмерном наблюдении объекта, пока указанный объект находится между рентгеновским источником устройства визуализации и указанным рентгеновским детектором устройства визуализации. Данные трехмерного изображения, полученные таким образом, содержат информацию о пространственной глубине, которая варьирует в зависимости от внешней поверхности объекта. Данные трехмерного изображения описывают геометрическую форму объекта в трех измерениях;
анализатор данных трехмерного изображения, выполненный для того, чтобы вычислять по принимаемым данным трехмерного изображения данные анатомических ориентиров объекта для того, чтобы таким образом получать данные управления устройством визуализации для того, чтобы управлять указанным устройством визуализации; причем вычисленные данные управления устройством визуализации включают в себя демаркационные данные, определяющие границу окна (W) коллимирования устройства визуализации для области (ROI) указанного объекта (PAT), представляющей интерес; и (ii) устанавливать, из принятых данных трехмерного изображения, данные положения анатомических ориентиров объекта, причем демаркационные данные основаны на указанных данных положения анатомических ориентиров;
блок управления, выполненный с возможностью использования вычисленных данных управления для того, чтобы управлять функционированием указанного устройства рентгеновской визуализации до или во время получения изображения указанного объекта, на основе указанных данных положения указанных анатомических ориентиров указанного объекта, причем такое функционирование указанного устройства рентгеновской визуализации включает в себя операцию коллимирования для рентгеновского пучка, исходящего из указанного рентгеновского источника.
Предложенное устройство регулирования устройства рентгеновской визуализации имеет возможность персонального/адаптивного и автоматического или полуавтоматического коллимирования и/или выравнивания геометрии устройства рентгеновской визуализации на основе оптического обнаружения и интерпретации трехмерной сцены. Пространственные данные трехмерной геометрической формы объекта (например, пациента), анатомические ориентиры организма, полученные из них, и заданную геометрию устройства рентгеновской визуализации вместе используют для того, чтобы управлять i) персональным коллимированием на желаемую анатомическую структуру, представляющую интерес, и/или ii) персональным выравниванием устройства визуализации (таким как ориентация трубки и детектора относительно пациента) и/или блокировкой экспонирования для того, чтобы избегать рентгеновского экспонирования во время движения пациента.
Во время получения изображения не нужно наносить маркеры на организм пациента. Пациент входит в помещение для исследования «как есть» и в нем в направлении желаемого пятна-мишени. Или автоматически, или по запросу от оператора устройства визуализации датчик возобновляет свое функционирование обнаружения. Трехмерную форму и геометрию трехмерных контуров пациента после этого используют для того, чтобы обнаруживать анатомические ориентиры, такие как конечности, туловище, шея, голова, плечо, общая высота тела, общая ширина тела и т.д. В зависимости от типа рентгеновского изображения, которое нужно получать, конкретные или некоторые из идентифицированных ориентиров наряду с их координатами положения, которые также можно извлекать из полученных данных трехмерного изображения, после этого используют для того, чтобы определять окно коллимирования в трехмерном пространстве.
Согласно одному из вариантов осуществления осуществляют трехмерное наблюдение за организмом пациента в полном объеме, в альтернативном варианте осуществления трехмерное наблюдение является только частичным, например ограничено туловищем пациента. Распознавание жестов и/или поз также можно использовать для того, чтобы различать пациентов и медицинский персонал, которому случается присутствовать во время получения изображения, что часто верно при вмешательствах с рентгеновским сопровождением, таких как лечение сосудов сердца. Согласно изобретению вычисленные данные управления содержат демаркационные данные, определяющие границы окна коллимирования устройства визуализации для области, представляющей интерес, указанного объекта.
Согласно одному из вариантов осуществления анализатор данных трехмерного изображения функционирует для того, чтобы обновлять окно коллимирования устройства визуализации в то время, когда обнаруживают движение объекта или по запросу пользователя, тем самым обновленное окно коллимирования устройства визуализации следит за движением объекта, блок управления использует обновленное окно коллимирования устройства визуализации для того, чтобы управлять получением изображения устройством визуализации во время движения объекта. Датчик выполнен с возможностью отслеживать движение объекта в трех пространственных измерениях. Согласно одному из вариантов осуществления имеет место приводимая в действие пользователем «однокнопочная» функциональность для адаптации окна коллимирования прямо перед испусканием рентгеновских лучей.
Согласно изобретению анализатор данных трехмерного изображения выполнен с возможностью устанавливать данные положения анатомических ориентиров объекта. Демаркационные данные основаны на указанных данных положения анатомических ориентиров. Другими словами, положение внутренних органов или анатомических структур, представляющих интерес, устанавливают по внешним признакам, таким как взаимное пространственное расположение и геометрическая форма внешних анатомических ориентиров. Согласно одному из вариантов осуществления имеет место база данных или таблица соответствия, где конкретные ориентиры связывают с рентгеновскими исследованиями различных типов. Когда пользователь вводит описание типа исследования, такое как «рентгенограмма грудной клетки», описание релевантных ориентиров можно загружать и использовать для обнаружения положения ориентира в данных трехмерного изображения. Затем положения ориентиров используют в качестве демаркационных данных для окна коллимирования.
Согласно одному из вариантов осуществления объектом является организм человека или животного, данные положения ориентиров указывают на положения множества суставов организма человека или животного или других анатомических ориентиров, как можно идентифицировать в качестве характерной вариации информации о пространственной глубине, например, конечностей, головы, части шеи, части плеча или других расположений частей организма.
Согласно одному из вариантов осуществления данные трехмерного изображения используют для распознавания скелета. В одном из вариантов осуществления для грудной клетки или рентгенограммы грудной клетки тазобедренные суставы и плечевые суставы идентифицируют по значениям глубины, составляющим данные трехмерного изображения, и линию, соединяющую два тазобедренных сустава используют в качестве нижней демаркации для окна коллимирования. Линия, соединяющая плечевые суставы, представляет собой верхнюю демаркацию, причем два бока туловища образуют латеральную демаркацию. Используя доступ к базе данных экспертных медицинских знаний и статистические анатомические даные, собираемые от большого числа пациентов, соответствие вычисленного окна можно оценивать и корректировать, например, с использованием схемы оценок. Высокая оценка указывает на то, что вычисленное окно хорошо соответствует данным текущего пациента (возраст, пол и т.д.). Либо экспертные данные вводит пользователь, либо устройство выполнено с возможностью соединения с базой данных для их извлечения. Можно учитывать вариации в анатомических структурах пациентов, таким образом увеличивая надежность вычисления окна коллимирования. Тогда знания можно использовать для того, чтобы подгонять вычисленное окно коллимирования. В варианте осуществления для грудной клетки, используя вычисленную демаркацию в качестве системы отсчета, верхние две трети тогда используют в качестве фактического окна коллимирования, поскольку можно ожидать, что здесь расположены легкие. Другими словами, окно коллимирования, как вычисляют по ориентирам, можно точно настраивать посредством устройства по известным положениям органов для заданного органа, представляющего интерес. В других вариантах осуществления окно коллимирования, как разграничивают посредством ориентиров, используют без дополнительной точной настройки.
Согласно изобретению управляемое функционирование устройства визуализации включает i) функционирование коллимирования для пучка, испускаемого указанным рентгеновским источником, и предпочтительно ii) выравнивание рентгеновской трубки и/или детектора относительно объекта и/или корректировку рабочего напряжения рентгеновского источника XR кВ пик. и/или мА-с (миллиампер/секунда) и/или времени экспонирования и/или дозы. Рабочее напряжение можно задавать в ответ на физиогномику пациента, в частности толщину пациента, как свидетельствует информация о глубине в данных трехмерного изображения. Другими словами, настройку кВ пик. корректируют для того, чтобы варьировать непосредственно в зависимости от толщины пациента.
Согласно одному из вариантов осуществления данные трехмерного изображения получают посредством экспонирования датчика неионизирующим излучением. Это позволяет снижать дозу пациента. Рентгеновский предварительный снимок не требуется для того, чтобы выравнивать устройство визуализации, и, в частности, для того, чтобы регулировать коллиматор устройства визуализации.
Согласно одному из вариантов осуществления датчик является частью камеры дальности. Примерами является оборудование Microsoft Kinect или ASUS Xtion Pro Live.
Согласно одному из вариантов осуществления датчик использует предварительно определяемую структурированную картину освещения, проецируемую на пациента или объект для того, чтобы получать данные трехмерного изображения. Согласно одному из вариантов осуществления структурированная картина освещения представляет собой пятнистую структуру. Согласно одному из вариантов осуществления, используют инфракрасный свет, но также предусмотрено использование света в видимом спектре. Предложенное устройство имеет возможность улучшать клинический поток операций, поскольку не требуется взаимодействие с пользователем для фактического коллимирования или выравнивания устройства визуализации (например, трубки и детектора). Настройки устройства визуализации адаптируют к размеру и/или толщине пациента, что в свою очередь обозначает уменьшенное число этапов потока операций для медицинского персонала в постоянно загруженном клиническом окружении. Даже персонал с поверхностным радиологическим образованием, в принципе, может работать на устройствах рентгеновской визуализации безопасно и эффективно.
Пациент выигрывает в том отношении, что число повторных снимков может быть уменьшено благодаря тому, что избегают ошибочного коллимирования, тем самым отвечая задаче ALARA («As Low As Reasonably Achievable»). Радиологи могут наслаждаться более высоким качеством изображения из-за меньшего рассеивания излучения благодаря исключительным настройкам коллимирования и выравнивания устройства визуализации.
Определения
«Данные трехмерного изображения» получают посредством датчика, чувствительного к неионизирующему излучению или звуку. Данные трехмерного изображения представляют собой массив пикселей, каждый пиксель имеет положение в указанном массиве и значение. Положение каждого пикселя соответствует положению точки на поверхности объекта, а значение непосредственно связано с или может быть выражено в единицах расстояния между датчиком камеры и точной поверхностью указанного объекта. Значения пикселей варьируют с расстоянием датчик-объект. Также предусмотрено представление в виде облака точек набора данных трехмерного изображения.
«Настройка устройства визуализации» включает «данные геометрии/выравнивания устройства визуализации» и «данные настройки коллиматора».
«Данные геометрии/выравнивания устройства визуализации» представляют собой набор положений в угловых или прямоугольных координатах, которые описывают пространственную конфигурацию устройства рентгеновской визуализации в какое-либо заданное время. Геометрия устройства визуализации зависит от конкретного используемого оборудования для визуализации, но в целом содержит корректируемые по высоте стол пациента (если имеет место), положение детектора и рентгеновской трубки в пространстве. Любая заданная геометрия устройства визуализации определяет относительное положение между пациентом, детектором, рентгеновским источником и коллиматором и положением датчика.
«Данные настройки коллиматора» определяют с помощью размера и геометрической формы апертуры, через которую рентгеновский пучок может проходить через коллиматор. Апертуру в свою очередь определяют с помощью относительных пространственных положений множества створок или шторок коллиматора.
«Визуализируемое пространство», или «промежуточное пространство устройства визуализации», или «домен устройства визуализации» представляет собой часть пространства (в целом, часть помещения для исследования), где объект, подлежащий визуализации, должен находиться во время получения изображения. Другими словами, имеет место по меньшей мере одна настройка геометрии устройства визуализации с тем, чтобы первичный рентгеновский пучок был способен облучать указанный объект, когда он находится в указанном промежуточном пространстве. Изображение нельзя получать, если объект находится за пределами промежуточного пространства устройства визуализации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее примеры вариантов осуществления изобретения описаны
со ссылкой на следующие чертежи, на которых:
на фиг. 1 представлен вид сбоку компоновки устройства рентгеновской визуализации;
на фиг. 2 представлены данные трехмерного изображения, полученного у пациента посредством датчика, используемого в компоновке в соответствии с фиг. 1;
на фиг. 3 представлена блок-схема способа управления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
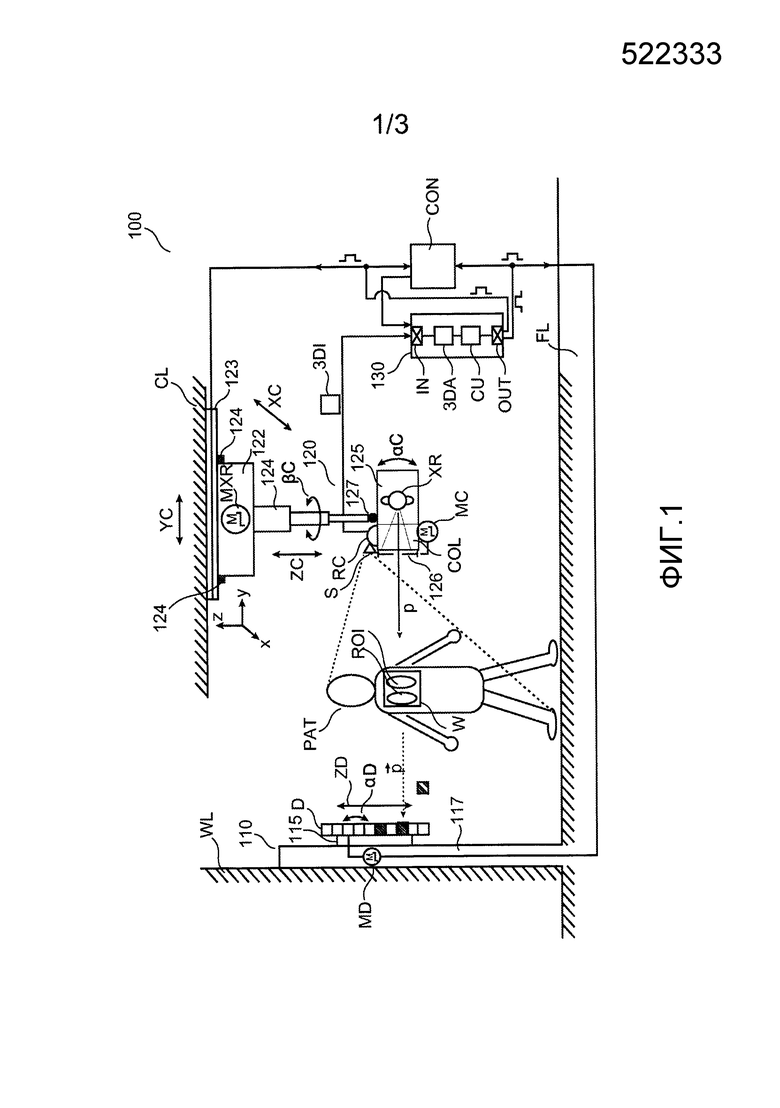
На фиг. 1 представлена компоновка устройства визуализации согласно одному из вариантов осуществления. Устройство 100 рентгеновской визуализации располагают в помещении для исследования. Помещение для исследования схематически обозначено с помощью пола FL, потолка CL и одной из стен WL. Устройство 100 визуализации способно функционировать для того, чтобы получать рентгеновские проекционные изображения в корректируемых направлениях проецирования от пациента PAT. Общим функционированием устройства 100 рентгеновской визуализации управляет оператор с компьютерной консоли CON. Консоль CON соединена с экраном или монитором (не показано), на котором получаемые рентгеновские изображения или настройки устройства визуализации можно смотреть или просматривать. Оператор, такой как медицинский техник-лаборант, может управлять через указанную консоль CON циклом получения изображения посредством выполнения отдельных рентгеновских экспонирований, например, посредством приведения в действие джойстика или педали или другого подходящего средства ввода, соединенного с консолью CON. Согласно другому варианту осуществления устройство 100 визуализации представляет собой раму С-типа, а пациент PAT фактически лежит на смотровом столе, а не стоит.
Устройство 100 рентгеновской визуализации содержит перемещаемый сборочный узел 110 детектора и перемещаемый сборочный узел 120 рентгеновская трубка-коллиматор (далее в настоящем документе обозначаемый как «сборочный узел СХ»).
Сборочные узлы можно перемещать с тем, чтобы рентгеновский пучок, генерируемый посредством рентгеновской трубки XR, можно было направлять и адаптировать к геометрической форме конкретной части организма ROI («области, представляющей интерес») организма пациента PAT, которая подлежит исследованию. Например, легкие пациента могут подлежать исследованию на «рентгенограмме грудной клетки», так что в этом случае область ROI, представляющая интерес, представляет собой грудную клетку пациента. Адаптацию пучка p границам области, представляющей интерес, достигают с помощью коллиматора COL после перемещения в желаемое положение относительно пациента PAT посредством приведение в действие перемещаемого сборочного узла СХ 120. До взаимодействия с коллиматором рентгеновский пучок p, исходящий из рентгеновской трубки XR, представляет собой расходящийся пучок, так что в отсутствие коллиматора COL размеры сечения пучка p по достижении пациента PAT будут значительно больше, чем площадь желаемой ROI. Это неудовлетворительно, поскольку может потребоваться излишнее увеличение дозы пациента и возникнет дополнительное комптоновское рассеяние. Задача коллиматора COL или «ограничителя пучка» состоит в том, чтобы ограничивать размеры сечения пучка с тем, чтобы размер и геометрическая форма сечения пучка p совпадали с областью ROI, представляющей интерес. В одном из вариантов осуществления коллиматор содержит две пары створок 126 (только одна пара показана в виде сбоку на фиг. 1) или листов («шторок»), сформированных из свинца, или вольфрама, или другого материала с высокой способностью поглощать излучение. Одну пару располагают перпендикулярно другой, а к створкам можно обращаться индивидуально и перемещать их с помощью шагового двигателя МС коллиматора с тем, чтобы ограничивать больше или меньше пучок в любом или двух из двух измерений в зависимости от их относительного положения. Таким образом, сечению пучка можно придавать такую форму, чтобы он совпадал с ожидаемой двухмерной границей области ROI, представляющей интерес. Эта компоновка коллиматора позволяет придавать пучку форму квадрата или прямоугольника различных размеров. В другом варианте осуществления используют многолепестковый коллиматор, который содержит вместо четырех створок больше число перемещаемых двигателем пластин или полосок с противоположным взаимным расположением. Многолепестковый коллиматор позволяет формировать более детализированные или криволинейные формы. Настройка коллиматора COL равняется тому, чтобы определять, как располагать створки с тем, чтобы сделать сечение получаемого пучка как можно более близко совпадающим с периметром ROI. В варианте осуществления с коллиматором с четырьмя створками совпадение указанной прямоугольной геометрической формы с ROI достигают посредством определения положений створок для указанных створок 126. Когда на створки подают энергию для того, чтобы принимать определенные положения, они вместе определяют апертуру, с использованием которой можно реализовать наименьшее или обоснованно малое прямоугольное сечение пучка, которое все еще включает всю желаемую ROI.
Теперь, обращаясь к другим компонентам перемещаемого сборочного узла СХ 120, указанный сборочный узел 120 содержит подвижную подвесную платформу 122, телескопическую руку 124 и корпус 125. В указанном корпусе 125 расположены рентгеновская трубка XR и коллиматор COL. Подвесная платформа 122 является подвижной и перемещаемой вдоль двух групп треков 124, 123, расположенных перпендикулярно друг другу, чтобы таким образом давать возможность двухмерного движения подвесной платформы 122 вдоль осей x, y. Трек X 122 делает возможным движение подвесной платформы 122 вдоль оси x, тогда как трек y 123 (изображенный на фиг. 1 идущим вертикально в плоскость листа) делает возможным движение вдоль оси у. Телескопическую руку 124 прикрепляют к подвесной платформе 122 и она выходит из нее в направлении вниз. На ее нижнем конце телескопическая рука 124 заканчивается точкой 127 поворота, к которой прикрепляют корпус 125. Другими словами, сборочный узел СХ обладает множеством степеней свободы с тем, чтобы располагать его в широком диапазоне желаемых положений относительно пациента PAT. Имеет место исполнительный механизм, такой как шаговый двигатель MXR, который осуществляет движение подвесной платформы 122 вдоль треков. На практике может иметь место больше чем один двигатель, которые расположены по одному для каждого трека, или один двигатель, где движением по x, y управляет подходящий приводной механизм. Телескопическая рука 124 устроена для того, чтобы сделать возможным движение корпуса 125 вверх и вниз вдоль оси z и вращение αС вокруг нее же. Движение вверх/вниз телескопической руки 124 и вращение вокруг оси z осуществляют посредством двигателя MXR или другого двигателя. Шаговый двигатель(и) MXR имеет возможность изменять «тангаж» С вокруг точки 127 поворота и изменять «рыскание» PC рентгеновской трубки XR и коллиматора COL вокруг оси z и относительно пациента PAT. В одном из вариантов осуществления тангаж трубки XR и коллиматора COL не зависят от двигателя MXR.
Теперь, обращаясь к сборочному узлу 110 детектора, он содержит настенный штатив 117, прикрепленный к полу FL и стене WL. Согласно другому варианту осуществления указанный настенный штатив является достаточно жестким, так что он устроен в качестве свободно стоящей структуры в помещении без крепления к стене WL. В других вариантах осуществления сборочный узел детектора прикрепляют к потолку CL (вместо пола или стены) и он свисает с него.
Детектор D подходит для того, чтобы принимать и регистрировать рентгеновские лучи p, исходящие из рентгеновской трубки XR. Детектор D фиксируют на установленной на стене платформе 115, которая подвижна в направлении Z по трекам, встроенным в настенный штатив 117. Здесь расположен шаговый двигатель MD, который осуществляет указанное движение вдоль оси z сборочного узла детектора, тот же или другой двигатель позволяет изменять тангаж αD. Детектор D содержит ячейки детектора, каждая из которых воспринимает падающий рентгеновский пучок. В одном из вариантов осуществления шаговый двигатель MD располагают также для того, чтобы менять тангаж детектора D вокруг оси x и/или платформа также подвижна на отдельных треках вдоль оси x.
В общих чертах, во время цикла получения изображения коллимированный рентгеновский пучок p исходит из рентгеновской трубки XR, проходит через пациента PAT в указанной области ROI, подвергается ослаблению посредством взаимодействия с веществом в ней и затем таким образом ослабленный пучок p сталкивается с поверхностью детектора D в множестве ячеек детектора. Каждая ячейка, с которой сталкивается указанный пучок, реагирует, выдавая соответствующий электрический сигнал. После этого совокупность указанных сигналов переводят с помощью системы получения данных («DAS» - не показана) в соответствующее цифровое значение, репрезентативное для указанного ослабления. Плотность органического материала, составляющего ROI, которая представляет собой грудную клетку и легочную ткань в случае рентгенограммы легких, определяет уровень ослабления. Материал высокой плотности (такой как кости) вызывает более сильное ослабление, чем менее плотные материалы (такие как легочная ткань). Таким образом, зарегистрированные цифровые значения для каждого рентгеновского луча p затем объединяют в массив цифровых значений, формирующих рентгеновское проекционное изображение для заданного времени получения и направления проецирования.
Теперь для того чтобы получать рентгеновское изображение устройство 100 визуализации нужно сначала выровнять относительно указанной области ROI, представляющей интерес. Параметры выравнивания устройства визуализации включают настройку указанных выше настроек коллиматора и выравнивание двух сборочных узлов относительно друг друга и относительно пациента PAT посредством управления различными исполнительными механизмами с тем, чтобы перемещать створки коллиматора и два сборочных узла в определенное положение с тем, чтобы коллиматор COL мог коллимировать пучок по ROI, как описано выше. Совокупность указанных выше параметров положения обозначают как параметры или данные геометрии или выравнивания устройства визуализации.
Обнаружено, что процедура настройки и корректировки параметров геометрии устройства визуализации («выравнивания») занимает приблизительно одну треть времени сеанса визуализации.
В настоящем документе предложена система управления, которая содержит камеру RC дальности и контроллер 130 для того, чтобы облегчать и ускорять процедуры выравнивания геометрии устройства визуализации и настройки коллиматора. Камера RC дальности показана расположенной на корпусе 125. Камеру дальности соединяют с контроллером 130. Компоновка камеры RC дальности и контроллера 130 позволяет автоматически или по меньшей мере полуавтоматически выравнивать устройство 100 визуализации, когда обнаружено присутствие пациента в «промежуточном пространстве» между детектором D и сборочным узлом СХ.
Согласно одному из вариантов осуществления настройка функционирования устройства визуализации является автоматической в том отношении, что обнаружение присутствия пациента также выполняют с помощью системы камеры RC и контроллера 130. В этом варианте осуществления устройство визуализации находится в режиме готовности и возобновляет функционирование, как только пациент PAT вступает в промежуточное пространство. В этом варианте осуществления камера RC находится в режиме постоянного восприятия и воспринимает указанное промежуточное пространство, и когда камера RC обнаруживает появление организма пациента, начинается настройка устройства визуализации. При полуавтоматическом функционировании пациента просят войти (и оставаться) в промежуточное пространство. Когда он в промежуточном пространстве, оператор приводит в действие кнопку операции «включить» или подает с помощью другого средства ввода (чувствительный к прикосновениям экран, щелчок кнопкой мыши, работа педалью и т.д.) сигнал «включить» и начинает настройку коллиматора и/или выравнивания устройства визуализации.
Вообще говоря, чтобы осуществлять настройку устройства визуализации, камера RC дальности выполнена с возможностью получать данные трехмерного изображения пациента PAT посредством экспонирования его неионизирующим излучением. Данные трехмерного изображения несут трехмерную форму пациента или по меньшей мере части пациента. Другими словами, данные трехмерного изображения «повторяют» или описывают внешнюю поверхность или периметр пациента PAT в трехмерном пространстве. Указанные полученные данные трехмерного изображения после этого подают на контроллер 130. Затем контроллер 130 обрабатывает указанные данные трехмерного изображения пациента таким образом, который описан более подробно ниже, чтобы выводить данные положения, которые определяют окно W коллимирования, очерчивающее желаемую область ROI, представляющую интерес, такую как легкие пациента PAT для рентгенограммы грудной клетки. Указанные данные положения затем переводят в данные желаемого выравнивания устройства визуализации, которые соответствуют данным положения окна коллимирования. Другими словами, когда устройство визуализации выравнивают в соответствии с переведенным в данные выравнивания, испускаемый рентгеновский пучок точно коллимируют (в пределах допустимой погрешности) по указанному вычисленному окну коллимирования.
Когда вычисляют данные положения окна W коллиматора, контроллер 130 выводит управляющие сигналы для устройства визуализации, которые соответствуют вычисленным или данным желаемого выравнивания для того, чтобы регулировать соответствующим образом текущее выравнивание устройства визуализации. Затем указанные управляющие сигналы интерпретируют посредством подходящего программного обеспечения драйвера и создают управляющие сигналы для аппаратного обеспечения, чтобы управлять различными шаговыми двигателями с тем, чтобы устройство визуализации принимало желаемую геометрию, то есть различные перемещаемые части «перемещались» в определенное положение. Указанные управляющие сигналы или посылают на рабочую станцию CON, где запущено программное обеспечение драйвера, или порт OUT вывода контроллера 130 соответствующим образом конфигурируют для сопряжения непосредственно с различными исполнительными механизмами для того, чтобы управлять ими, чтобы реализовать эталонные или данные желаемого выравнивания устройства визуализации.
Функционирование контроллера 130 и камеры RC далее объяснено более подробно.
Функционирование
Контроллер 130 содержит порт IN ввода, порт OUT вывода, анализатор 3DA трехмерных изображений и блок CU управления.
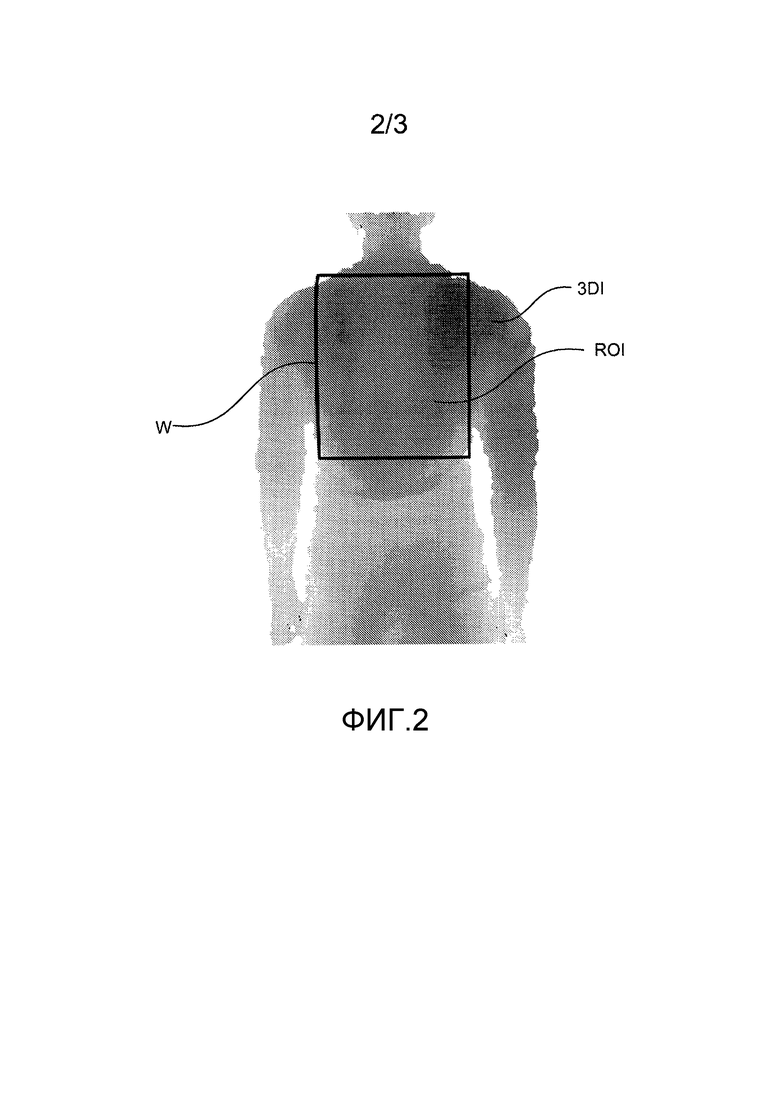
Со ссылкой на фиг. 2 представлен пример рендеринга (2,5-мерной карты расстояний) набора трехмерных изображений пациента, как захвачено с помощью камеры RC дальности. Значения серого у пикселей варьируют непосредственно в зависимости от расстояния от поверхности пациента до датчика S камеры RC. Геометрическую форму пациента легко различать по выступающей грудной клетке, показанной более темной по причине ее близости к датчику S по сравнению с дистальной частью бедра.
Согласно одному из вариантов осуществления камера RC дальности содержит проектор, который проецирует конус структурированного света на пациента PAT. Указанный структурированный свет, например, можно формировать в виде пятнистой структуры, как описано в US 2009/0096783. Отражение указанного света от поверхности пациента возвращается к камере, затем его регистрирует датчик S, аналогичным образом содержащийся в камере. «Искажение» в отраженной пятнистой структуре регистрируют посредством сравнения с тем, как пятнистая структура должна выглядеть, если пациент там отсутствует. Зарегистрированные искажения затем переводят в значение расстояния для каждого пикселя. Также можно принимать во внимание, что датчик и проектор могут не обязательно находиться в одном и том же корпусе камеры, как изложено ранее. Согласно одному из вариантов осуществления проектор и датчик S можно располагать в виде различных компонентов. Однако следует понимать, что камера RC дальности также может работать в соответствии с различными принципами, например, время прохождения, стереотриангуляция, триангуляция световой плоскости, интерферометрия и кодированная апертура.
В одном из вариантов осуществления камера RC, или ее датчик S, и/или проектор можно сами наклонять посредством функционирования подходящего двигателя (не показано), тем самым добавляя дополнительную степень свободы при корректировке параметров выравнивания/координат устройства визуализации.
Набор данных трехмерных изображений 3DI принимают через порт IN ввода контроллера 130. Данные трехмерного изображения 3DI, полученные таким образом, затем направляют в трехмерный анализатор 3DA. В силу операции слежения операционной системы центральной консоли CON относительное положение между датчиком S камеры RC и рентгеновской трубкой XR известно во все моменты времени и, таким образом, известно расстояние «от источника до приемника изображения» (SID). Расстояние от датчика до поверхности пациента, как закодировано посредством набора трехмерных данных, можно легко переводить в соответствующее расстояние от каждой точки на поверхности пациента до рентгеновской трубки XR. Другими словами, трехмерный анализатор может вычислять расстояние от источника до объекта (SOD). Согласно одному из вариантов осуществления анализатор 3DA трехмерных изображений функционирует для того, чтобы вычислять данные положения окна W коллиматора. Для того чтобы вычислять координаты окна коллиматора, анатомические ориентиры обнаруживают на основе получаемого набора данных трехмерных изображений.
На фиг. 2 представлен пример окна коллиматора вокруг ROI для рентгенограммы грудной клетки. Окно коллиматора представляет собой прямоугольник, ограничивающий область грудной клетки пациента.
Различные подходы предусмотрены для того, чтобы обнаруживать анатомические ориентиры, чтобы таким образом реализовать пациент-адаптивное рентгеновское коллимирование:
Согласно одному из вариантов осуществления используют «почти» безмодельный подход. Он основан на априорном знании или определенных предположениях о том, где расположена область, представляющая интерес. Например, ожидают, что часть грудной клетки пациента находится перед детектором с известным расстоянием от источника до детектора SID, что помогает идентифицировать, исключительно на основе информации о геометрической форме в принимаемых трехмерных данных, релевантные ориентиры организма, такие как плечи и левый и правый бока туловища, с помощью глубины изображения. Например, трехмерный анализатор итеративно строка за строкой проходит значения глубины в данных трехмерного изображения, поставляемые с помощью камеры RC, и когда регистрируют значительное изменение, предполагают, что обнаружены бока туловища.
Согласно одному из вариантов осуществления используют аппроксимационную параметрическую модель тела для поверхности тела, такую как модель SCAPE. См., например, D. Anguelov et al. (2005), «SCAPE: shape completion and animation of people», ACM Trans. Graph., 24(3), 408-416. Такая модель обеспечивает точное и масштабируемое представление о геометрической форме и позе организма человека. Ее можно использовать для сопоставления поверхности с силуэтами, получаемыми из полученных данных трехмерного изображения. Это ведет к точному описанию организма пациента, которое можно использовать для того, чтобы определять местоположение анатомической области, представляющей интерес.
Согласно одному из вариантов осуществления способ обнаружения скелета используют для того, чтобы обнаруживать и отслеживать организма пациента PAT. Организм описан в качестве набора положений суставов скелета. Координаты суставов скелета представляют собой начальную точку для локализации области грудной клетки пациента. Удлиненные структуры, образованные конечностями пациента, могут быть повторены в отпечатке изображения туловище с тем, чтобы получать ключи к тому, где расположены суставы.
Согласно одному из вариантов осуществления используют трехмерное совмещение с аннотированной усредненной трехмерной моделью организма. С этой целью обобщенную трехмерную модель организма (например, массив СТ данных) с сегментированными и аннотированными органами можно использовать для того, чтобы аппроксимировать положение релевантной анатомической структуры пациента, например легких. Обобщенную трехмерную модель организма подгоняют/масштабируют по трехмерной полученной геометрической форме тела пациента PAT. Подгонку и масштабирование можно осуществлять посредством способов трехмерного совмещения. Анатомическую информацию об обобщенной и масштабированной трехмерной модели затем можно использовать для того, чтобы идентифицировать анатомическую структуру, представляющую интерес, и окно коллимирования для пациента, соответственно. См., например, K.S. Arun et al. (1992), «Least-Square Fitting of Two 3-D Point Sets» IEEE Transactions on Pattern Analysis and Machine Intelligence, том 14, стр. 239-256, где масштабирование и подгонка соответствуют наименьшим квадратам.
Каждый из приведенных выше подходов основан на пользовательском вводе, который позволяет контроллеру 130 идентифицировать тип исследования, который представляет область ROI, представляющую интерес. В одном из вариантов осуществления оператор может выбирать строковые записи на естественном языке, такие как «рентгенограмма грудной клетки», из структуры мены в подходящим образом выполненном GUI, который отображают на экране. Каждая запись может содержать подменю, такие как «рентгенограмма грудной клетки» → «сканирование легких» и так далее. В подходящей структуре ассоциативных данных каждая запись связана с определениями в геометрических терминах или иным образом для анатомических ориентиров, релевантных для выбранного типа исследования. Затем анализатор 3DA вводит координаты положения анатомических ориентиров, релевантные данному типу исследования. Положения анатомических ориентиров определяют границы окна W коллимирования.
Когда вычисляют координаты окна коллимирования, поток операций переходит к блоку CU управления. Параметр координат положения можно выражать в абсолютных значениях пространственных координат, каждое описывает конкретное положение в промежуточном пространстве устройства визуализации. Указанные данные положения коллиматора можно отображать на экране для оператора согласно одному из вариантов осуществления. Блок CU управления использует соответственно запрограммированные драйверы и блоки интерфейсов для сопряжения с рабочей станцией CON.
Блок CU управления запрашивает у CON текущие параметры геометрии устройства визуализации, включая текущие настройки коллиматора. Когда принимают текущие параметры геометрии устройства визуализации, желаемые параметры геометрии устройства визуализации вычисляют на основе координат вычисленного окна W коллиматора. Затем блок CU управления вычисляет желаемые параметры устройства визуализации, которые будут обеспечивать облучение рентгеновским пучком только области пациента в пределах вычисленного окна коллиматора.
Следует понимать, что точное описание координат для окна коллиматора зависит от текущего исследования и типа используемого коллиматора. Например, для 4-створочного коллиматора, способного придавать прямоугольную форму сечению пучка, прямоугольник, определяющий указанное окно коллиматора, можно определять посредством четырех точек пространственных координат в промежуточном пространстве устройства визуализации.
Тогда блок CU управления сравнивает текущую геометрию устройства визуализации и текущее окно коллиматора с вычисленным желаемым окном коллиматора, адаптированным к текущей ROI пациента PAT. Значения коррекции для различных углов и координат, в частности для положений створок коллиматора, вычисляют и направляют на рабочую станцию CON. Драйверы переводят эти запросы коррекции координат в управляющие сигналы, которые затем направляют на релевантные шаговые двигатели. Затем на подходящие шаговые двигатели соответствующим образом подают энергию для того, чтобы осуществлять повторное выравнивание устройства 100 визуализации и коллимирование коллиматора COL в соответствии с желаемой геометрией устройства визуализации и вычисленным желаемым окном коллиматора. Соответствующий сигнал «готов к экспонированию» после этого подают с помощью рабочей станции и, возможно, визуально представляют оператору. Рентгеновское проекционное изображение или получают автоматически, или оператор должен сначала привести в действие соответствующую кнопку или педаль экспонирования.
Согласно одному из вариантов осуществления набор данных трехмерных изображений, как принимают от камеры RC, отображают на экране для оператора. Согласно одному из вариантов осуществления вычисленное окно коллимирования отображают в виде наложения на аналогичным образом отображаемый рендер полученных данных трехмерного изображения, как на фиг. 2. Это способствует безопасности операции визуализации, поскольку человек-оператор может визуально проверять, правильно ли вычислено окно коллиматора. Согласно одному из вариантов осуществления обратную связь с оператором также можно осуществлять посредством адаптации светового поля коллиматора, проецируемого на пациента в реальном времени. В этом варианте осуществления в коллиматоре расположена лампа, световое поле, создаваемое посредством указанной лампы, освещает фактическую ROI, так что оператор может проверять вычисленное коллимирование перед рентгеновским экспонированием.
Согласно одному из вариантов осуществления устройство рентгеновской визуализации 130 содержит функциональность блокировки экспонирования. Это можно благоприятно использовать, когда пытаются синхронизировать экспонирование рентгенограммы грудной клетки с желаемым состоянием дыхания. В этом варианте осуществления камера RC продолжает захватывать последовательность кадров данных трехмерных изображений в течение длительного периода времени для того, чтобы отслеживать расширение грудной клетки пациента во время дыхания. На основе геометрической формы грудной клетки, как зарегистрировано в последовательности отдельных трехмерных изображений, можно устанавливать скорость изменения геометрической формы. Когда указанная скорость падает ниже предварительно определяемого порогового значения, допускают, что вдох выполнен, и подают пусковой сигнал с тем, чтобы получать рентгеновское изображение в этот момент.
Несмотря на то, что пациенту обычно нужно стоять спокойно во время цикла рентгеновской визуализации, данная система также может быть способна получать последовательность рентгеновских изображений, между тем как пациент двигается во время получения множества изображений. До тех пор пока пациент остается в пределах промежуточного пространства устройства визуализации и до тех пор пока перемещения достаточно медленны по сравнению со способностью системы осуществлять повторную корректировку с помощью шаговых двигателей параметры визуализации, пациент может свободно перемещаться, а система при приеме множества новых наборов данных трехмерных изображений повторно динамически вычисляет окно коллиматора ROI, а параметры устройства визуализации повторно задают соответствующим образом. Другими словами, контроллер CON работает для того, чтобы получать последовательность окон коллиматора, сфокусированных на ROI, каждое адаптировано к различным положениям пациента. Вычисляют соответствующую коррекцию выравнивания устройства визуализации и обновляют геометрию устройства визуализации для того, чтобы следовать за движениями пациента.
Согласно одному из вариантов осуществления указанные выше настройки устройства визуализации также включают рабочее напряжение рентгеновской трубки XR для любой заданного получения изображения. Указанное напряжение трубки представляет собой функцию ожидаемой толщины пациента. Если ожидают, что пучок должен проникнуть через большее количество ткани, более высокое напряжение требуется для того, чтобы поддерживать заданное качество изображения. Другими словами, согласно этому варианту осуществления, контроллер 130 работает для того, чтобы корректировать параметры экспонирования трубки (кВ пик. и мА-с) на основе толщины пациента, в качестве получаемого из значений глубины в наборах полученных данных трехмерных изображений. Получаемую толщину пациента в области внутри вычисленного окна коллиматора после этого сравнивают со значениями для установок в предварительно определяемых поисковых таблицах для того, чтобы сопоставлять мощность трубки с типом исследования, органом, толщиной пациента, высотой, полом и т.д.
Как показано на фиг. 1, камеру RC дальности располагают в корпусе 125 коллиматора/рентгеновской трубки. Это соответствует только одному из вариантов осуществления. В других вариантах осуществления камеру RC дальности располагают на потолке CL, на подвесной платформе 122, или на настенном штативе 117, или на стене W. В варианте осуществления, где проектор и датчик камеры RC дальности представляют собой компоненты с отдельными корпусами, проектор можно располагать на потолке CL, а только датчик S располагать сверху или снизу корпуса 125. Во всех вариантах осуществления камеру располагают таким образом, что датчик камеры Sis способен захватывать по существу все промежуточное пространство устройства визуализации или по меньшей мере ту часть промежуточного пространства, где можно ожидать присутствия пациента во время получения изображения. Описанную выше компоновку камеры дальности и контроллера 130 можно легко адаптировать для работы, например, в устройстве рентгеновской визуализации с рамой С-типа, где пациент PAT должен лежать на смотровом столе во время получения изображения вместо того, чтобы стоять, как показано на фиг. 1.
Компоненты контроллера 130 показаны встроенными во всего один блок. Однако в альтернативных вариантах осуществления некоторые или все компоненты устроены в виде отдельных модулей в распределенной архитектуре и соединены в подходящую коммуникационную сеть. Контроллер 130 и его компоненты могут быть устроены в качестве специализированных FPGA или в качестве отдельных аппаратных микросхем. В некоторых вариантах осуществления контроллер 130 или некоторые из его компонентов находятся в рабочей станции CON, запущенные в качестве стандартного программного обеспечения. Компоненты можно программировать на подходящей научной вычислительной платформе, такой как Matlab® или Simulink®, и затем транслировать в стандартные программы C++ или С, хранящиеся в библиотеке и подключаемые, когда их вызывают с помощью рабочей станции CON.
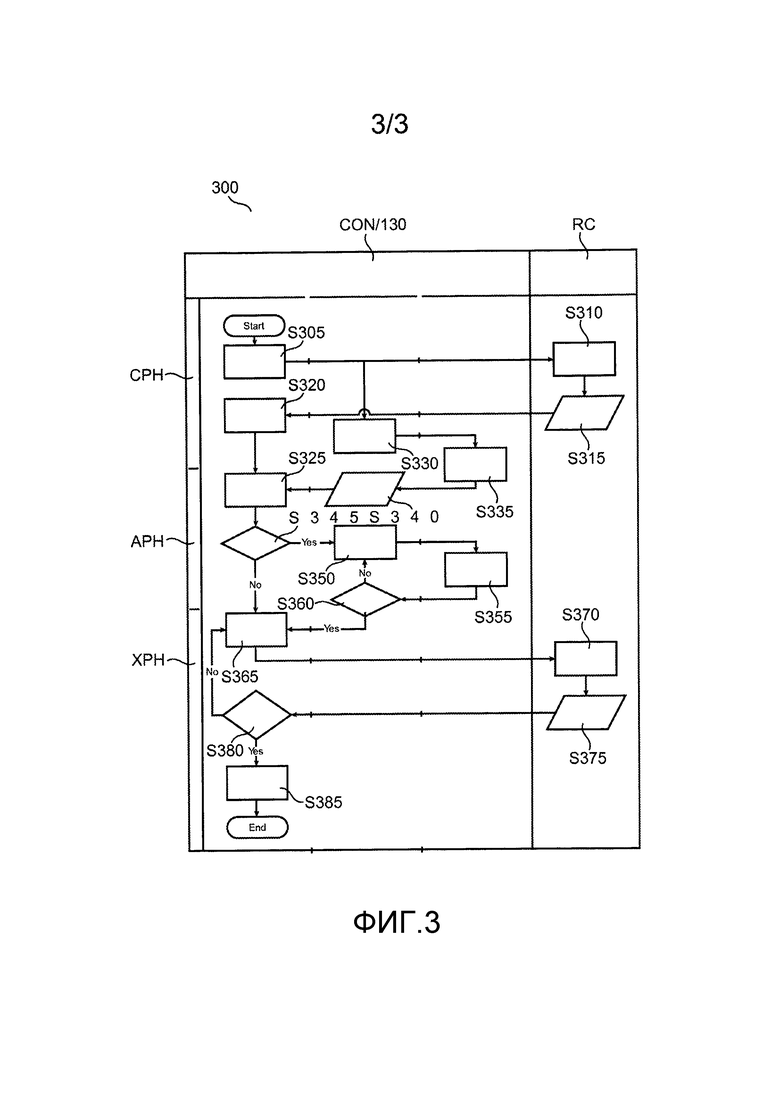
Со ссылкой на фиг. 3 представлена блок-схема для способа управления устройством 100 визуализации. Блок-схема показывает участвующие компоненты системы вдоль горизонтальной оси и их взаимодействия на различных этапах в различных фазах вдоль вертикальной оси. Фазы представляют собой фазу СРН автоматического или полуавтоматического коллимирования, фазу РН повторного выравнивания устройства визуализации и фазу ХРН необязательной блокировки экспонирования.
На этапе S305 запрашивают текущую настройку устройства визуализации, включая текущие данные выравнивания устройства визуализации и текущую настройку коллиматора.
На этапе S310 камера дальности получает данные трехмерного изображения от пациента, находящегося в промежуточном пространстве устройства визуализации.
На этапе S315 набор полученных данных трехмерного изображения выводят и направляют на и принимают с помощью контроллера 130.
Затем контроллер 130 принимает на этапе 320 полученные данные трехмерного изображения и вычисляет на этапе S320 данные положения для данных желаемого окна коллимирования для коллиматора устройства визуализации на основе трехмерной формы пациента, о которой свидетельствуют принимаемые данные трехмерного изображения на этапе S315.
На этапе S325 вычисленные данные коллимирования переводят в данные желаемого выравнивания устройства визуализации. Другими словами, на основе вычисленного желаемого окна коллимирования соответствующие данные желаемого положения для детектора и рентгеновской трубки вычисляют, которые при реализации будут выравнивать устройство визуализации соответствующим образом, и тогда рентгеновский пучок будут коллимировать по вычисленному окну коллимирования. Для вычисления на этапе S325 данных желаемого выравнивания устройства визуализации необходимы текущие данные выравнивания устройства визуализации, которые запрашивают на этапе S330 из данных настроек устройства визуализации, которые запрашивают на этапе S320. На этапе S335 запрашиваемые текущие данные выравнивания возвращают в ответ на запрос от различных исполнительных механизмов MD, МС, MXR устройства 100 визуализации и затем направляют в качестве текущих данных геометрии на этапе S340 в блок CU управления.
На этапе S345 вычисленные данные желаемого выравнивания, соответствующие вычисленному коллимированию на S320, сравнивают с запрошенными текущими данными геометрии устройства визуализации. Если текущие данные выравнивания устройства визуализации определяют при достаточной вариации с использованием вычисленных данных желаемого выравнивания устройства визуализации, на этапе S350 подают управляющие команды на различные шаговые двигатели, чтобы таким образом применять подходящую коррекцию к текущей геометрии устройства визуализации.
На этапе S355 геометрию повторно выравнивают соответствующим образом, приводя в действие шаговые двигатели для того, чтобы применять коррекцию.
На этапе 360 проверяют, соответствует ли таким образом обновленное выравнивание устройства визуализации данным желаемого выравнивания или недостаточно или чрезмерно скорректировано положение относительно вычисленного желаемого выравнивания. Если имеет место недостаточная или чрезмерная коррекция, то повторяют этапы 350 и 355. Если обновленные данные геометрии соответствуют предварительно определяемому пределу погрешности вычисленных данных геометрии, систему надлежащим образом повторно выравнивают и управление потоком входит в необязательный режим блокировки экспонирования. Если режим блокировки экспонирования отсутствует или указанная функциональность деактивирована, начинают экспонирование и получают рентгеновское проекционное изображение.
Когда находятся в режиме блокировки экспонирования, на этапе S365 на основе данных трехмерного изображения устанавливают, находится ли пациент в состоянии максимального вдоха. С этой целью камера дальности получает новые данные трехмерного изображения на этапе S370 и выводит обновленные данные трехмерного изображения на этапе S375. Затем обновленное трехмерное изображение сравнивают с предыдущими данными трехмерного изображения на этапе S380, находится ли пациент в состоянии максимального вдоха. Если состояние максимального вдоха не обнаруживают, то повторяют этапы S365, S370 и этап S375. Если состояние максимального вдоха обнаруживают, то управление потоком переходит к этапу S385, где осуществляют рентгеновское экспонирование и получают изображение. Следует принимать во внимание, что описанная выше блокировка экспонирования может быть связана с другими или дополнительными динамическими состояниями организма. Например, экспонирование можно синхронизировать с желаемым сердечным циклом, а не дыхательным циклом, когда устройство 100 визуализации используют для цикла ангиографической визуализации.
Согласно одному из вариантов осуществления, даже когда не находятся в режиме блокировки экспонирования, на этапе S370 обновленные данные трехмерного изображения получают через корректируемые пользователем интервалы, и на этапе S365 посредством сравнения с предыдущими данным трехмерного изображения определяют, имело ли место движение пациента. Если движение пациента имело место, управление потоком возвращается к этапу S320 и вычисляют обновленное окно коллиматора, а этапы S320-S360 повторяют соответствующим образом. Таким образом, вычисляют ряд окон коллиматора и соответствующий ряд данных повторного выравнивания устройства визуализации и устройство визуализации повторно выравнивают в соответствии с движением пациента. Другими словами, окно коллимирования следит за пациентом, а устройство визуализации динамически повторно выравнивают соответствующим образом на всем протяжении периода движения пациента.
В другом примере варианта осуществления настоящего изобретения предоставлена компьютерная программа или компьютерный программный элемент, который отличается тем, что его адаптируют для того, чтобы исполнять этапы способа согласно одному из предшествующих вариантов осуществления, на подходящей системе.
Компьютерный программный элемент, следовательно, можно хранить в компьютерном блоке, который также может представлять собой часть варианта осуществления настоящего изобретения. Этот вычислительный блок можно адаптировать для того, чтобы осуществлять или вызывать осуществление этапов способа, который описан выше. Кроме того, его можно адаптировать для того, чтобы управлять компонентами описанного выше устройства. Вычислительный блок можно адаптировать для того, чтобы управлять автоматически, и/или для того, чтобы исполнять приказы пользователя. Компьютерную программу можно загружать в рабочую память процессора данных. Процессор данных, таким образом, можно оборудовать для того, чтобы осуществлять способ по изобретению.
Этот пример варианта осуществления изобретения охватывает как компьютерную программу, которая с самого начала использует изобретение, так и компьютерную программу, которая посредством обновления превращает существующую программу в программу, которая использует изобретение.
Кроме того, компьютерный программный элемент может быть способен обеспечивать все необходимые этапы для того, чтобы выполнять процедуру по примерному варианту осуществления способа, как описано выше.
Согласно дополнительному примеру варианта осуществления настоящего изобретения представлен машиночитаемый носитель, такой как CD-ROM, причем машиночитаемый носитель имеет компьютерный программный элемент, сохраненный на нем, при этом компьютерный программный элемент описан в предшествующем разделе.
Компьютерную программу можно хранить и/или распространять на подходящем носителе, таком как оптический запоминающий носитель или твердотельный носитель, поставляемый вместе с или в качестве части другого аппаратного обеспечения, а также можно распространять в других формах, например через интернет или другие проводные или беспроводные телекоммуникационные системы.
Однако компьютерную программу также можно представлять через сеть, такую как World Wide Web, и можно загружать в рабочую память процессора данных из такой сети. Согласно дополнительному примеру варианта осуществления настоящего изобретения предоставлен носитель для того, чтобы делать компьютерный программный элемент доступным для загрузки, этот компьютерный программный элемент устроен для того, чтобы осуществлять способ согласно одному из предварительно описанных вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описаны со ссылкой на различные объекты изобретения. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы изобретения о способах, тогда как другие варианты осуществления описаны со ссылкой пункты формулы изобретения об устройстве. Однако специалист в данной области поймет из приведенного выше и нижеследующего описания, что до тех пор, пока иное не указано, в дополнение к любой комбинации признаков, относящихся к объектам изобретения одного типа, также раскрытой в этой заявке считают любую комбинацию между признаками, относящимися к различным объектам изобретения. Вместе с тем, можно комбинировать все признаки, предоставляя синергические эффекты, которые представляют собой больше чем просто суммирование признаков.
Хотя изобретение иллюстрировано и описано подробно на чертежах и в приведенном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или служащие в качестве примера и не ограничивающие. Изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации в раскрытых вариантах осуществления могут осознать и реализовать специалисты в данной области при практическом осуществлении описываемого в заявке изобретения, изучив чертежи, раскрытие и зависимые пункты формулы изобретения.
В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а форма единственного числа не исключает множественного. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в пунктах формулы изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с пользой. Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Группа изобретений относится к медицинской технике, а именно к диагностическим магнитно-резонансным системам. Система для регулирования содержит устройство регулирования рентгеновской визуализации, которая содержит порт ввода для приема данных трехмерного изображения, полученных с помощью датчика при трехмерном наблюдении объекта, причем принятые таким образом данные трехмерного изображения содержат информацию о пространственной глубине, при этом данные трехмерного изображения описывают геометрическую форму объекта в трех измерениях, анализатор данных трехмерного изображения, выполненный с возможностью вычислять по принятым данным трехмерного изображения данные анатомических ориентиров объекта, причем вычисленные данные управления устройством визуализации включают в себя демаркационные данные, определяющие границу окна коллимирования устройства визуализации для области объекта, представляющей интерес, устанавливать из принятых данных трехмерного изображения данные положения анатомических ориентиров объекта, блок управления, причем функционирование устройства рентгеновской визуализации включает в себя операцию коллимирования для рентгеновского пучка, исходящего из рентгеновского источника. Система регулирования выполняется посредством работы устройства регулирования с использованием машиночитаемого носителя. Использование группы изобретений обеспечивает расширение арсенала средств для персональной и автоматической корректировки рентгеновской системы. 4 н. и 7 з.п. ф-лы, 3 ил.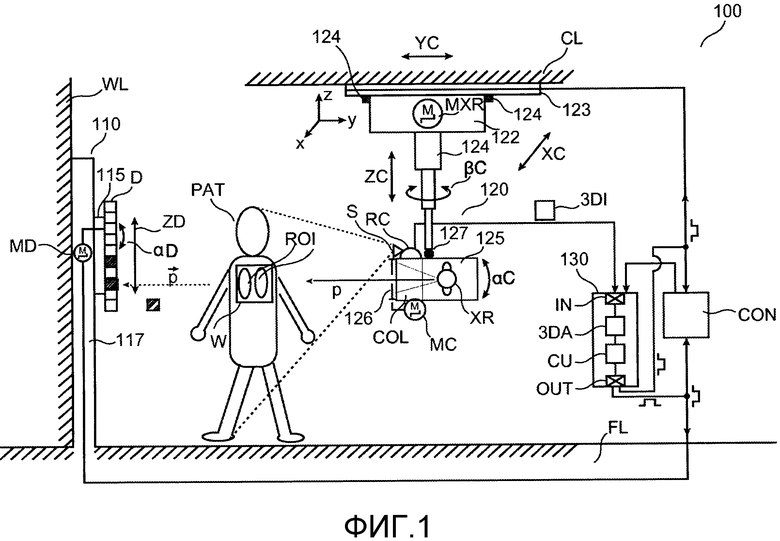
1. Устройство регулирования устройства рентгеновской визуализации, содержащее:
порт (IN) ввода для приема данных трехмерного изображения, полученных с помощью датчика (S) при трехмерном наблюдении объекта, пока указанный объект (PAT) находится между рентгеновским источником (XR) устройства (100) рентгеновской визуализации и рентгеновским детектором (D) указанного устройства визуализации, причем принятые таким образом данные трехмерного изображения включают в себя информацию о пространственной глубине, которая варьирует в зависимости от внешней поверхности объекта (PAT), при этом указанные данные трехмерного изображения описывают геометрическую форму объекта (PAT) в трех измерениях;
анализатор (3DA) данных трехмерного изображения, выполненный с возможностью: (i) вычислять по принятым данным трехмерного изображения данные анатомических ориентиров объекта (PAT) для того, чтобы таким образом получать данные управления устройством визуализации для управления указанным устройством рентгеновской визуализации, причем вычисленные данные управления устройством визуализации включают в себя демаркационные данные, определяющие границу окна (W) коллимирования устройства визуализации для области (ROI) указанного объекта (PAT), представляющей интерес; и (ii) устанавливать, из принятых данных трехмерного изображения, данные положения анатомических ориентиров объекта, причем демаркационные данные основаны на указанных данных положения анатомических ориентиров;
блок управления (CU), выполненный с возможностью использования вычисленных данных управления устройством визуализации для того, чтобы управлять функционированием указанного устройства (100) рентгеновской визуализации до или во время получения изображения указанного объекта на основе указанных данных положения указанных анатомических ориентиров указанного объекта, причем такое функционирование указанного устройства рентгеновской визуализации включает в себя операцию
коллимирования для рентгеновского пучка, исходящего из указанного рентгеновского источника.
2. Устройство по п. 1, в котором анализатор (3DA) данных трехмерного изображения выполнен с возможностью обновления окна (W) коллимирования устройства визуализации, когда движение объекта (PAT) обнаруживают посредством датчика (S) или по запросу пользователя, причем обновленное окно (W) коллимирования устройства визуализации тем самым следует за движением объекта, блок управления (CU) выполнен с возможностью использования обновленного окна коллимирования устройства визуализации для того, чтобы управлять устройством рентгеновской визуализации во время движения объекта.
3. Устройство по п. 1 или 2, в котором объект (PAT) представляет собой организм человека или животного, данные положения анатомических ориентиров указывают на положения множества суставов организма человека или животного или указывают на другие анатомические ориентиры, идентифицируемые в качестве характерной вариации информации о пространственной глубине.
4. Устройство по п. 1 или 2, в котором управляемое функционирование устройства визуализации, кроме того, включает в себя выравнивание рентгеновской трубки (XR) и/или детектора (D) относительно объекта и/или корректировку рабочего напряжения рентгеновского источника (XR).
5. Устройство по п. 1 или 2, в котором данные трехмерного изображения получают посредством экспонирования датчика (S) неионизирующим излучением.
6. Устройство по п. 1 или 2, в котором датчик (S) представляет собой часть камеры (RC) дальности.
7. Устройство по п. 1 или 2, в котором датчик выполнен с возможностью использования предварительно определяемой структурированной картины освещения, проецируемой на объект (PAT) для того, чтобы получать данные трехмерного изображения.
8. Способ для регулирования устройства рентгеновской визуализации, содержащий этапы:
приема (S315) данных трехмерного изображения, полученных с
помощью датчика (S) при трехмерном наблюдении объекта, пока указанный объект (PAT) находится между рентгеновским источником (XR) устройства (100) рентгеновской визуализации и рентгеновским детектором (D) указанного устройства визуализации, причем принятые таким образом данные трехмерного изображения включают в себя информацию о пространственной глубине, которая варьирует в зависимости от внешней поверхности объекта, при этом указанные данные трехмерного изображения описывают геометрическую форму объекта (PAT) в трех измерениях;
вычисления (S320-S325) по принятым данным трехмерного изображения данных анатомических ориентиров объекта (PAT) для того, чтобы таким образом получать данные управления устройством визуализации для управления указанным устройством (100) рентгеновской визуализации, причем вычисленные данные управления включают в себя демаркационные данные, которые определяют границу окна коллимирования устройства визуализации для области указанного объекта, представляющей интерес, при этом демаркационные данные основаны на данных положения указанных анатомических ориентиров, установленных из данных трехмерного изображения;
использования (S350-S360) вычисленных данных управления устройства визуализации для того, чтобы управлять функционированием указанного устройства рентгеновской визуализации во время и/или до получения изображения указанного объекта, при этом функционирование включает в себя коллимирование рентгеновского пучка, исходящего из указанного рентгеновского источника (XR); и
обновления (S365) окна коллимирования устройства визуализации, когда обнаруживают движение объекта, или по запросу пользователя, причем обновленное окно коллимирования устройства визуализации тем самым следует за движением объекта; и
использования обновленного окна коллимирования устройства визуализации для того, чтобы управлять устройством визуализации во время или между движением объекта.
9. Система для регулирования устройства рентгеновской визуализации, содержащая:
устройство по любому одному из предшествующих пп. 1-7;
устройство (100) рентгеновской визуализации;
датчик (S).
10. Система по п. 9, в которой устройство (100) рентгеновской визуализации имеет сборочный узел (С-Х), содержащий рентгеновский источник (XR) и коллиматор (COL), причем датчик (S) расположен на указанном сборочном узле «рентгеновский источник-коллиматор» (С-Х).
11. Машиночитаемый носитель, на котором хранится компьютерная программа для регулирования устройства рентгеновской визуализации, которая при исполнении процессором побуждает процессор осуществлять этапы способа по п. 8.
| US 2009285357 A1, 19.11.2009 | |||
| US 2008101538 A1, 01.05.2008 | |||
| RU 0095108699 A1, 27.12.1996. |

