Изобретение относится к способам создания аэродинамических сил на крыле летательного аппарата (ЛА), включая пилотируемые и беспилотные ЛА, управляемые ракеты, и устройствам для их осуществления, а конкретно - к способам создания аэродинамических сил на крыле ЛА за счет изменения его формы, а также для управления величиной этих сил.
Известен способ создания аэродинамической силы на крыле ЛА классической схемы, который заключается в создании разности давлений на верхней и на нижней поверхностях крыла [Краснов Н.Ф. Основы аэродинамического расчета. Аэродинамика тел вращения, несущих и управляющих поверхностей. Аэродинамика летательных аппаратов. М.: Высшая школа, 1981. - 496 с.]. Выражение для определения величины подъемной аэродинамической силы крыла Yкр имеет вид:

где  производная подъемной силы крыла по углу атаки α, q=ρV2/2 - скоростной напор набегающего потока воздуха; ρ - плотность воздуха на высоте полета h, V - воздушная скорость полета ЛА, Sкр - площадь крыла ЛА.
производная подъемной силы крыла по углу атаки α, q=ρV2/2 - скоростной напор набегающего потока воздуха; ρ - плотность воздуха на высоте полета h, V - воздушная скорость полета ЛА, Sкр - площадь крыла ЛА.
Способ создания боковой аэродинамической силы, возникающей, как правило, на вертикальном оперении ЛА, имеет аналогичную физическую природу. В качестве кинематического параметра набегающего потока воздуха в данном случае рассматривается угол скольжения β.
Основными способами изменения величины подъемной аэродинамической силы у ЛА классической схемы в полете являются изменение угла атаки α, изменение скорости V полета ЛА и изменение геометрических параметров крыла, которое может приводить к изменению площади крыла Sкр и к изменению производной подъемной силы крыла по углу атаки  .
.
Известны способы изменения геометрических параметров крыла и, соответственно, величины аэродинамической подъемной силы за счет изменения угла стреловидности крыла χ. При этом может изменяться стреловидность крыла ЛА за счет поворота части крыла [Патент RU 2 296 082 от 12.08.2005] либо за счет поворота всего крыла [Заявка RU 94 014 644 от 19.04.1994]. В данных технических решениях изменение геометрии крыла происходит в горизонтальной плоскости ЛА.
Для увеличения подъемной силы применяются самолеты-бипланы, имеющие два крыла, разнесенные между собой по вертикали [Патент RU 203535 от 04.03.2021], рамные и сотовые решетчатые крылья [Решетчатые крылья/Белоцерковский С.М., Одновол Л.А., Сафин Ю.З. и др.; под ред. Белоцерковского С.М. - М.: Машиностроение, 1985. - 320 с.]. Эти конструкции крыльев имеют неизменяемую геометрию.
Известен способ создания подъемной силы путем применения решетчато-щелевой системы, которая характеризуется тем, что содержит несколько рабочих элементов [Патент RU 2281225 от 14.09.2004]. Взаимное положение рабочих элементов в пространстве может изменяться их последовательными сдвигами вперед и вверх по направлению движения в среде и углом поворота вокруг продольной оси.
Наиболее близким к заявляемому изобретению по технической сущности является способ управления величиной аэродинамической силы за счет того, что решетчатые крылья, шарнирно соединенные с корпусом, имеют возможность поворота так, чтобы изменялся угол между продольной осью корпуса и плоскостью решетчатого крыла [Патент RU 25 079 U1 от 23.05.2002 г.]. При этом крыло изменяет свое положение в пространстве, но конструкция самого крыла имеет неизменяемую форму.
Недостатками описанных способов создания аэродинамических сил и устройств для их осуществления (аналогов и прототипа) являются: значительные габариты конструкции крыла ЛА, что увеличивает вероятность обнаружения и поражения ЛА за счет значительной по величине его радиолокационной заметности; неоптимальная работа крыла на различных режимах полета; сложность реализации режимов непосредственного управления подъемной и боковой силами, что также влияет на боевую эффективность ЛА; сложность реализации взлетно-посадочных режимов ЛА; необходимость иметь для обеспечения режимов взлета и посадки механизацию крыла (предкрылки, закрылки) и систему управления этими элементами механизации; необходимость иметь на крыле органы управления (элероны, интерцепторы) и системы управления этими органами управления для обеспечения движения ЛА по крену.
Задачей изобретения является устранение отмеченных недостатков, а именно: уменьшение габаритных размеров ЛА и повышение эффективности ударных беспилотных и пилотируемых ЛА путем управления величиной аэродинамических сил.
Технический результат достигается за счет того, что заявляемый способ создания аэродинамических сил ЛА, имеющего монопланное (одна несущая поверхность) крыло, заключается в управляемом изменении величин аэродинамических сил на этом крыле, в зависимости от режима полета, за счет изменения геометрической формы крыла в плоскости, перпендикулярной продольной оси ЛА, в результате чего монопланное крыло преобразуется в полипланное (несколько несущих поверхностей) крыло.
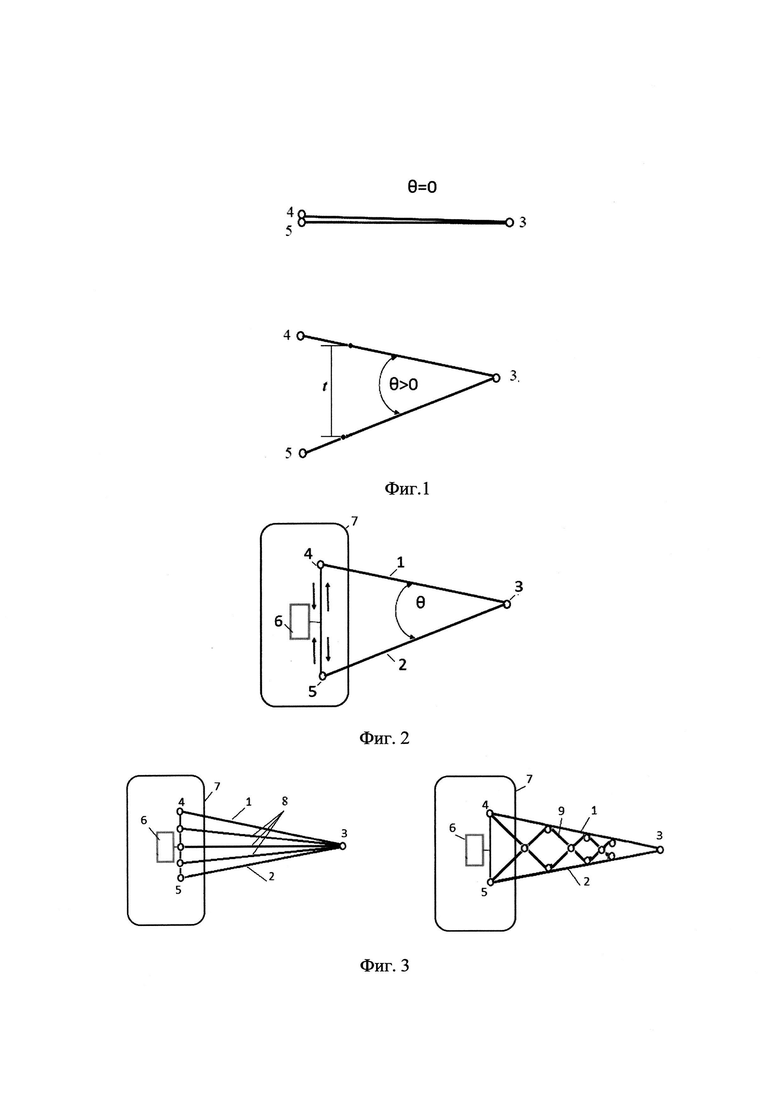
Изменение геометрии крыла в плоскости, перпендикулярной продольной оси ЛА, в предлагаемой конструкции характеризуется углом раскрытия крыла θ, как показано на фиг. 1. Величины аэродинамических сил для полипланных систем существенно зависят от их геометрических параметров, в том числе от шага t - расстояния между двумя соответствующими по своему положению на плоскостях точками двух соседних планов (несущих поверхностей) крыла (см. фиг. 1), то есть при изменении геометрических параметров полипланной системы за счет изменения угла раскрытия крыла θ в полете можно изменять расстояние t между планами системы и, соответственно, изменять величины аэродинамических сил, которые создает эта система [Решетчатые крылья / Белоцерковский С.М., Одновол Л.А., Сафин Ю.З. и др.; под ред. Белоцерковского С.М. - М.: Машиностроение, 1985. - 320 с.].
Приращение подъемной силы крыла ЛА при изменении его геометрии в плоскости, перпендикулярной продольной оси ЛА, определяют по формуле:

а приращение боковой силы - по формуле:

где  - производные коэффициентов подъемной и боковой сил крыла по углу раскрытия крыла θ.
- производные коэффициентов подъемной и боковой сил крыла по углу раскрытия крыла θ.
Устройство для осуществления заявляемого способа создания аэродинамических сил на крыле летательного аппарата за счет использования крыла с изменяемым углом раскрытия в плоскости, перпендикулярной продольной оси ЛА, представляет собой крыло, выполненное с возможностью управляемого изменения его геометрической формы в плоскости, перпендикулярной продольной оси ЛА, на угол раскрытия θ крыла, который изменяют в зависимости от режима полета ЛА, и включает в себя функционально и конструктивно связанные верхнюю и нижнюю плоскости, шарнирно соединенные между собой на законцовке крыла (3) и с устройством изменения геометрии крыла (6), установленным в фюзеляже ЛА (7). При этом устройство изменения геометрии крыла выполняют в виде электромеханического устройства, в котором изменение геометрии крыла происходит при вращении электромотором шестерен, приводящих в движение зубчатые рейки, к которым прикреплены шарниры (4, 5) верхней (1) и нижней (2) плоскостей крыла, или в виде гидромеханического устройства, в котором изменение геометрии крыла происходит за счет перемещения тяг (14), к которым прикреплены шарниры (4, 5) верхней (1) и нижней (2) плоскостей крыла, под действием управляющего гидроцилиндр (13). В плоскости деформации крыла устанавливают дополнительные несущие поверхности, которые могут быть выполнены как плоскими (8), так и в виде решетчатой конструкции (9), в которой несущие поверхности решеток соединены шарнирно.
Заявляемое изобретение иллюстрируется чертежами:
- фиг. 1 - принцип изменения геометрической формы крыла в плоскости, перпендикулярной продольной оси ЛА;
- фиг. 2 - конструкция крыла с изменяемой геометрической формой в плоскости, перпендикулярной продольной оси ЛА;
- фиг. 3 - конструкция крыла с изменяемой геометрической формой в плоскости, перпендикулярной продольной оси ЛА, с дополнительными несущими поверхностями;
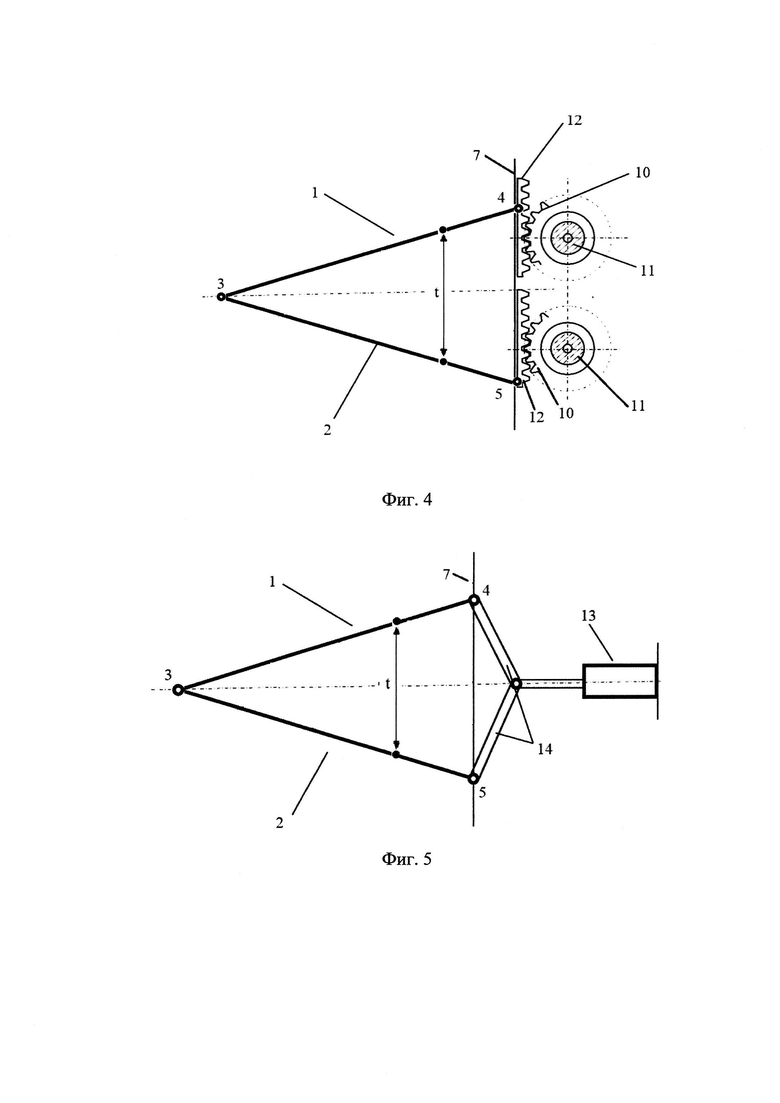
- фиг. 4 - электромеханическая система управления устройством изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА;
- фиг. 5 - гидромеханическая система управления устройством изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА;
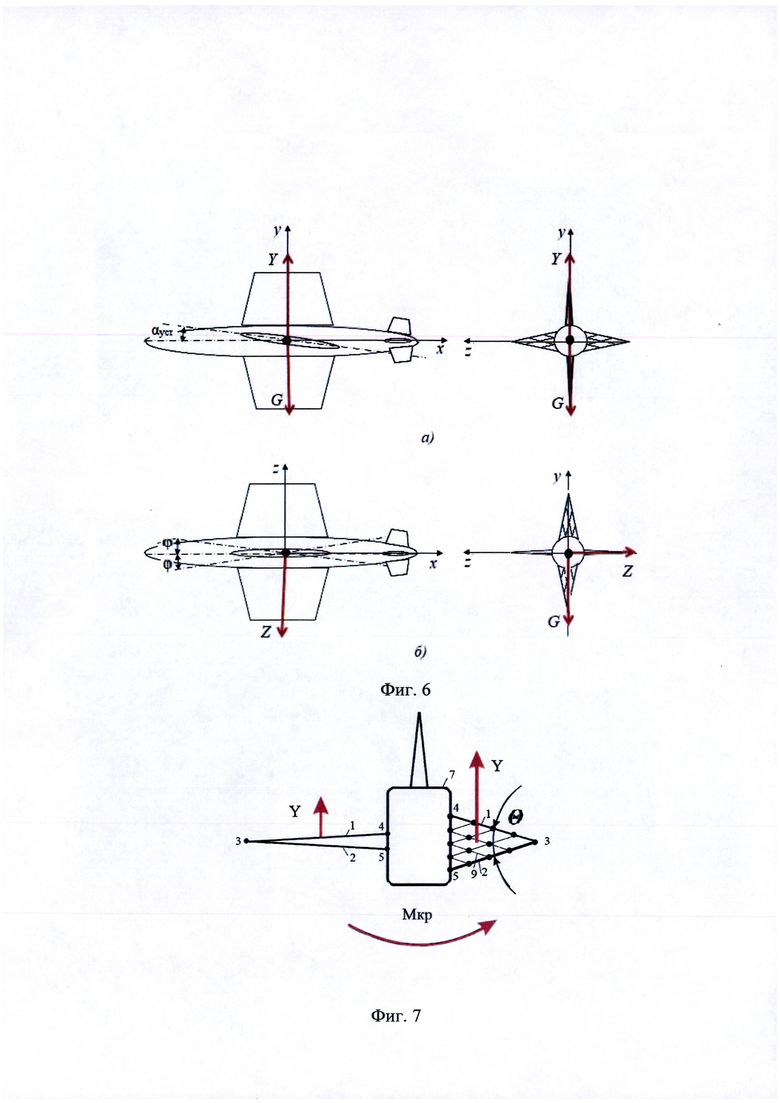
- фиг. 6 - способы непосредственного управления подъемной (а) и боковой (б) аэродинамическими силами с помощью крыла изменяемой геометрии в плоскости, перпендикулярной продольной оси ЛА;
- фиг. 7 - способ создания момента крена при дифференциальном раскрытии плоскостей крыла изменяемой геометрии в плоскости, перпендикулярной продольной оси ЛА.
На чертежах (фиг. 1-7) использованы следующие обозначения: 1 - верхняя плоскость крыла; 2 - нижняя плоскость крыла; 3, 4, 5 - шарнир; 6 - устройство изменения геометрии крыла; 7 - фюзеляж ЛА; 8 - дополнительные плоские несущие поверхности; 9 - дополнительные решетчатые несущие поверхности; 10 - шестерни; 11 - валы электродвигателей; 12 - зубчатые рейки; 13 - гидроцилиндр; 14 - тяга гидромеханической системы.
Крыло предлагаемой конструкции (см. фиг. 2) состоит из верхней 1 и нижней 2 плоскостей, шарнирно соединенных между собой на законцовке крыла 3. Кроме того, верхние и нижние плоскости крыла также с помощью шарниров 4, 5 крепятся к устройству 6 изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА, установленному в фюзеляже ЛА 7. Под действием устройства изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА, крыло ЛА раскрывается на угол θ между верхней 1 и нижней 2 плоскостями крыла. В результате раскрытия монопланное крыло становится полипланным.
Предлагаемая конструкция крыла конструктивно может быть дополнена плоскими 8 или решетчатыми 9 несущими поверхностями, установленными между верхней 1 и нижней 2 плоскостями полипланного крыла (см. фиг. 3).
Устройство 6 для изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА, может быть выполнено, например, в виде электромеханической или гидромеханической системы.
Устройство работает следующим образом.
Устройство 6 для изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА, выполненное в виде электромеханической системы (см. фиг. 4), состоит из шестерен 10, закрепленных на валах 11 электродвигателей, при вращении которых перемещается зубчатые рейки 12, соединенные с верхней 1 и нижней 2 плоскостями крыла шарнирами 4 и 5. При вращении шестерен 10 верхняя 1 и нижняя 2 плоскости крыла перемещаются в плоскости перпендикулярной продольной оси ЛА, раскрывая или закрывая полипланное крыло. При этом изменяется шаг t и, соответственно, изменяется величина аэродинамической силы.
Устройство 6 для изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА, выполненное в виде гидромеханической системы (см. фиг. 5), состоит из гидроцилиндра 13, шарнирно связанного с тягами 14, управляющими положением верхней 1 и нижней 2 плоскостей крыла. При выдвижении штока гидроцилиндра 13 угол раскрытия крыла θ увеличивается, и крыло раскрывается, а когда шток гидроцилиндра 13 втягивается, угол раскрытия крыла θ уменьшается, и крыло закрывается. При этом изменяется шаг t и, соответственно, изменяется величина аэродинамической силы.
Предлагаемое техническое решение позволяет реализовать принцип непосредственного управления аэродинамическими (подъемной и боковой) силами. Для этого крыло, деформируемое в плоскости, перпендикулярной продольной оси ЛА, устанавливается в месте расположения центра тяжести ЛА. При этом для реализации движения в вертикальной плоскости крыло устанавливается с установочным углом αуст (см. фиг.6, а), а для реализации бокового движения крыло должно иметь возможность поворота на некоторый угол ϕ относительно продольной оси ЛА (см. фиг. 6, б). В случае необходимости создания боковой силы крыло поворачивается на угол ϕ относительно продольной оси ЛА и после этого изменяет свою геометрию в плоскости, перпендикулярной продольной оси ЛА, раскрывшись на угол θ. При изменении угла раскрытия крыла θ изменяется величина аэродинамических (подъемной или боковой) сил, и ЛА движется по траектории с некоторым углом наклона траектории (некоторым углом рыскания в боковом движении), вплоть до значений, близких к 90°, т.е. практически перпендикулярно первоначальному движению без поворота продольной оси ЛА в пространстве. Использование способа непосредственного управления аэродинамическими (подъемной или боковой) силами создает значительные преимущества данному ЛА при ведении воздушного боя по сравнению с ЛА, выполненным по классической схеме, который при изменении высоты полета движется по наклонной траектории.
Применение в конструкции ЛА крыльев изменяемой геометрии в плоскости, перпендикулярной продольной оси ЛА, и принципа непосредственного управления аэродинамическими (подъемной и боковой) силами упрощает взлетно-посадочные режимы полета ЛА. Изменение подъемной силы ЛА при этом происходит за счет изменения скорости полета ЛА и изменения угла раскрытия крыла 0. При этом продольная ось ЛА остается параллельной горизонтальной плоскости, и ЛА совершает плоскопараллельное движение в вертикальной и в горизонтальной плоскостях, что значительно упрощает пилотирование ЛА на режимах взлета и посадки.
Плоское движение ЛА, то есть без углов крена и наклона траектории, при непосредственном создании аэродинамических сил в отличие от движения с ненулевыми значениями углов крена и наклона траектории дает значительные преимущества при ведении аэросъемки. В процессе плоского разворота при движении по заданной траектории отсутствуют углы крена, что положительно сказывается на качестве получаемых аэрофотоснимков.
Применение крыла изменяемой геометрии в плоскости, перпендикулярной продольной оси ЛА, позволяет реализовать движение по крену без классических органов управления этим видом движения - элеронов, и, соответственно, без системы управления элеронами. При дифференциальном изменении угла раскрытия крыла ЛА (см. фиг. 7) возникает разность аэродинамических сил на консолях крыла ΔYкр, что приведет к возникновению момента крена ЛА Мкр.
Технический результат заключается в решении задачи изобретения - в уменьшении габаритных размеров ЛА за счет уменьшения размаха крыла и в повышении эффективности ударных беспилотных и пилотируемых ЛА за счет появления возможности непосредственного управления величиной аэродинамических сил путем управляемого изменения геометрии крыла в плоскости, перпендикулярной продольной оси ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ СИЛЫ ТЯГИ И КПД ВОЗДУШНОГО ВИНТА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2388652C2 |
| УНИВЕРСАЛЬНЫЙ ПОЛИПЛАН | 1992 |
|
RU2025295C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2013 |
|
RU2534112C1 |
| СПОСОБ ФОРМООБРАЗОВАНИЯ И АЭРОДИНАМИЧЕСКОЙ РАСКРУТКИ КРЫЛЬЧАТОГО ВЕТРОКОЛЕСА С ГОРИЗОНТАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2005 |
|
RU2370410C2 |
| СТВОРЧАТО-ПОВОРОТНЫЙ ПОЛИПЛАН "СППАГ" | 2009 |
|
RU2407677C1 |
| Игнорирующий турбулентность самолет и датчик изменения угла атаки самолета | 2019 |
|
RU2710955C1 |
| ДВУХКРЫЛЬЕВАЯ СИСТЕМА С ПОЛОЖИТЕЛЬНОЙ ИНТЕРФЕРЕНЦИЕЙ | 2008 |
|
RU2381142C1 |
| Модульный летательный аппарат и способ его вертикального взлёта | 2021 |
|
RU2777132C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| РАКЕТНЫЙ БЛОК МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2053168C1 |
Изобретение относится к способам создания аэродинамических сил на крыле летательного аппарата (ЛА), включая пилотируемые и беспилотные ЛА, управляемые ракеты, и устройствам для их осуществления, а конкретно к способам создания аэродинамических сил на крыле ЛА за счет изменения его формы, а также для управления величиной этих сил. Способ создания аэродинамических сил на крыле ЛА заключается в управляемом изменении величин аэродинамических сил за счет изменения геометрической формы крыла в плоскости, перпендикулярной продольной оси ЛА. Группа изобретений также относится к устройству для осуществления такого способа. Задачей изобретения является повышение боевой эффективности применения ударных беспилотных и пилотируемых ЛА путем реализации способа создания аэродинамических сил за счет изменения геометрической формы крыла в плоскости, перпендикулярной продольной оси ЛА, и устройства для его осуществления. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Способ создания аэродинамических сил на крыле летательного аппарата, заключающийся в использовании движения монопланного крыла в воздушном потоке, отличающийся тем, что монопланное крыло выполнено с возможностью управляемого изменения его геометрической формы, в зависимости от режима полета, в плоскости, перпендикулярной продольной оси летательного аппарата, за счет изменения угла раскрытия θ крыла, в результате чего монопланное крыло преобразуют в полипланное крыло, снабженное дополнительными несущими поверхностями, имеющими плоскую форму или форму решетки, при этом приращение подъемной силы определяют по формуле:

а приращение боковой силы - по формуле:

где  - производные коэффициентов подъемной и боковой сил крыла по углу раскрытия крыла θ; θ - угол раскрытия крыла; q=ρV2/2 - скоростной напор набегающего потока воздуха; ρ - плотность воздуха на высоте полета h; V - воздушная скорость полета ЛА; Sкр - площадь крыла летательного аппарата.
- производные коэффициентов подъемной и боковой сил крыла по углу раскрытия крыла θ; θ - угол раскрытия крыла; q=ρV2/2 - скоростной напор набегающего потока воздуха; ρ - плотность воздуха на высоте полета h; V - воздушная скорость полета ЛА; Sкр - площадь крыла летательного аппарата.
2. Устройство для осуществления способа создания аэродинамических сил на крыле летательного аппарата по п. 1, представляющее собой крыло, выполненное с возможностью управляемого изменения его геометрической формы в плоскости, перпендикулярной продольной оси летательного аппарата, на угол θ раскрытия крыла, который изменяют в зависимости от режима полета летательного аппарата, отличающееся тем, что включает в себя функционально и конструктивно связанные верхнюю и нижнюю плоскости, шарнирно соединенные между собой на законцовке крыла и шарнирно связанные с устройством изменения геометрии крыла, установленным в фюзеляже летательного аппарата, при этом в плоскости деформации крыла устанавливают дополнительные несущие поверхности.
3. Устройство по п. 2, отличающееся тем, что дополнительные несущие поверхности выполнены плоскими.
4. Устройство по п. 2, отличающееся тем, что дополнительные несущие поверхности выполнены в виде решетчатой конструкции, в которой несущие поверхности решеток соединены шарнирно.
5. Устройство по п. 2, отличающееся тем, что изменение геометрии крыла выполняют с помощью электромеханического устройства путем вращения электромотором шестерен, приводящих в движение зубчатые рейки, к которым прикреплены шарниры нижней и верхней плоскостей крыла.
6. Устройство по п. 2, отличающееся тем, что изменение геометрии крыла выполняют с помощью гидромеханического устройства за счет перемещения тяг, к которым прикреплены шарниры верхней и нижней плоскостей крыла, под действием управляющего гидроцилиндра.
| US 2016159456 A1, 09.06.2016 | |||
| ФИКСАТОР КОСТНОГО ЛОСКУТА | 2009 |
|
RU2410056C2 |
| КРЫЛО ОБРАТНОЙ СТРЕЛОВИДНОСТИ С ПОВОРОТНОЙ ЧАСТЬЮ КОНСОЛЕЙ | 2005 |
|
RU2296082C1 |
| WO 2017072520 A1, 04.05.2017 | |||
| US 6076776 A, 20.06.2000. | |||

