Область техники, к которой относится изобретение
Изобретение относится к авиации, а именно к летательным аппаратам (далее, сокращенно, ЛА) тяжелее воздуха, обладающим возможностью вертикального взлёта.
Уровень техники
Существуют ЛА вертикального взлёта с несущим винтом (например, вертолеты), которые на всех этапах полета используют тягу винтового движителя для создания вертикальной подъёмной силы. Для изменения скорости горизонтального полета – используется поворот вектора тяги с помощью механизмов периодического изменения шага лопастей винта.
Существуют ЛА вертикального взлёта самолетного типа, у которых создание подъемной силы на этапах вертикального взлета обеспечивают либо вспомогательные движители, либо поворот тяги основных движителей, что усложняет и утяжеляет конструкцию ЛА.
Для обеспечения постоянной связи частей ЛА, соединенных между собой сборочными операциями на производстве, используются соединительные элементы, обычно применяемые для неразборных (например, заклепки) и сборно-разборных (например, болты) соединений. Такие связи относительно жёсткие, они фиксируют и не позволяют в полете значительно изменять взаиморасположение секций крыла и других частей ЛА, а только в пределах деформации их конструкции.
В ЛА имеются также соединительные элементы, например, шарнирных механизмов, которые позволяют в полете изменять угловое взаиморасположение секций крыла (например, концевых частей консолей крыла) и других частей ЛА (например, элевонов или шасси), и соединительные элементы реечных или винтовых механизмов, которые позволяют в полете изменять расстояние между секциями крыла (например, закрылками и предкрылками). Существуют также гибкие соединительные элементы (например, части тросовой проводки системы управления рулями самолета), которые позволяют в полете изменять угловое взаиморасположение частей ЛА и расстояния между ними, но ограничивают эти перемещения.
В существующих ЛА с вертикальным взлётом типа тэйлситтер (tailsitter или tail-sitter), поворот тяги основных движителей достигается путем поворота всего ЛА, например, в ЛА JumpShip фирмы "Transition Robotics Inc (описания представлены в сети Интернет по адресу https://transition-robotics.com/pages/jumpship). Тэйлситтер JumpShip имеет две консоли крыла, располагаемые параллельно. В горизонтальном полете они расположены одна над другой, как у самолетов с аэродинамической схемой биплан. На консолях фиксировано размещены двигатели с винтами - движители, создающие тягу и моменты управления. Консоли соединены стойкой. Для создания потребного момента управления от движителей стойка имеет достаточно большой размер.
В другом тэйлситтере Prime Air (описания представлены в сети Интернет по адресу https://usaherald.com/wp-content/uploads/2020/09/primeair-delivery.jpg) фирмы Amazon фиксировано соединены шесть секций (3D модели ЛА представлены в сети Интернет по адресу
https://free3d.com/3d-model/amazon-prime-air-delivery-drone-3062.html?__cf_chl_jschl_tk__=pmd_5f35303b09c1360fd1017bc6b38988708e6d1f9a-1627969765-0-gqNtZGzNAk2jcnBszQiO).
Величина вертикальной составляющей потребной тяги для вертикального взлёта подобных ЛА должна быть не менее их веса.
Наиболее близким аналогом, прототипом предлагаемого технического устройства является беспилотный летательный аппарат SUAV:Q, описание которого приведено в материалах по патенту US20180273170 и в сети Интернет по адресу https://nplus1.ru/news/2017/02/25/wing. В прототипе создание подъемной силы на этапах вертикального полета обеспечивают фиксировано установленные на консолях крыла движители, которые создают тягу. Для вертикального полета ЛА устанавливается так, чтобы их тяга была направлена вверх. На этапах горизонтального полета необходимую подъемную силу в прототипе, как и в предлагаемом заявителем техническом решении, обеспечивают крыло, консоли которого состоит из секций. Для того, чтобы поперечные аэродинамические силы, создаваемые крылом, были направлены вверх, в прототипе используется изменение положения всего ЛА и изменение углового взаиморасположения секций крыла между собой. Для этого применяется система электромоторов, тяг, шарниров.
Раскрытие сущности изобретения
Для ЛА вертикального взлёта требуется, чтобы изменения суммарного вектора тяги движителей относительно центра тяжести ЛА обеспечивали потребные силы и моменты управления на фазах вертикального полета (включая этапы вертикального взлета и посадки, а также и висение). Для этого плечи приложения векторов тяги движителей относительно центра тяжести ЛА должны быть достаточно велики, а моменты от их тяги могли уравновешивать действие других сил, в том числе, тяги других движителей и силы тяжести. В то же время большие плечи векторов тяги движителей относительно центра тяжести ЛА создают проблемы при их отказах, а большие пилоны движителей или отклоненные консоли крыла снижают аэродинамическую эффективность ЛА.
Целью предлагаемого заявителем технического решения является увеличение аэродинамической и весовой эффективности ЛА с вертикальным взлётом.
Для увеличения аэродинамической эффективности в предлагаемом заявителем ТУ, аналогично прототипу, используется увеличение удлинения крыла в плане и трансформирование конструкции ЛА к аэродинамической схеме моноплан при переходе в режим горизонтального полета.
В предлагаемом заявителем техническом решении используется модульная конструкция ЛА, а также соединительные элементы и фиксирующие устройства с возможностью полного рассоединения некоторых из них, которые позволяют в полете изменять угловое взаиморасположение секций крыла и других частей ЛА и расстояния между ними, причем, значительно, вплоть до отделения модулей ЛА от других его частей. Для управления степенью фиксации положения консолей используются простые устройства с электромеханическими замками и/или с механическими защелками (например, типа штырь-конус, аналогичные тем, что используются даже в конструкциях стыковочных узлов космических аппаратов). Для соединения частей модульного ЛА (далее, сокращенно МЛА) также могут использоваться гибкие тросы. Это позволяет упростить конструкции МЛА и снизить её вес.
Некоторые модули ТУ выполнены в виде ЛА, например, самолетов аэродинамической схемы летающее крыло. На крайних внешних секциях правой и левой консолей крыла модулей-самолетов, установлены фиксирующие соединительные элементы.
Перед взлетом модули МЛА соединены, установлены и зафиксированы так, что крайние внешние секции консолей крыльев модулей-самолетов МЛА располагаются рядом. Проекции осей консолей на горизонтальную плоскость, образуют замкнутый многоугольник, а замки фиксирующих их соединение элементов, установленных на консолях, обеспечивают образование замкнутого силового контура конструкции крыла МЛА.
Модули МЛА с движителями установлены и зафиксированы так, чтобы суммарная тяга движителей МЛА была направлена вверх и обеспечивала достаточную для вертикального взлета вертикальную подъемную силу, а изменения суммарного вектора тяги движителей относительно центра тяжести МЛА обеспечивали потребные моменты управления на фазах вертикального полета и висения.
После фазы вертикального взлета МЛА, жесткая фиксация секций крыла и/или других частей МЛА прекращается, модули МЛА которые переходят в фазу горизонтального крейсерского полета, отсоединяются друг от друга и/или от остальных частей МЛА, которые могут продолжить и/или завершить полет самостоятельно.
После того, как жесткая фиксация секций крыла и/или других частей МЛА прекращается, а часть фиксирующих и соединительных устройств полностью рассоединяются, МЛА трансформируется (разделяется) на группу отдельных модулей, состоящих из частей составного ТУ. Для управления модулями-самолетами используются обычные органы управления (например, элевоны) модулей, которые входили в состав системы управления МЛА.
Изменение положения модулей после разделения достигается за счет инерционных сил, силы тяжести, а также изменения внешних сил с помощью (аэродинамических и/или газодинамических) устройств управления модулей МЛА, которые использовались для управления полетом всего МЛА до разделения. Устройства управления (рули, элевоны, щитки и т.п.) приводятся в действие приводами по командам экипажа и/или автоматической системы управления (автопилота беспилотного ЛА).
Для увеличения аэродинамической эффективности в фазах горизонтального крейсерского полета также может использоваться эффект группового полета отдельных модулей крылом к крылу (аналогично полету клина журавлей). Таким образом группа модулей-самолетов (ЛА, состоящих из частей МЛА) за счет полезной интерференции секций консолей крыльев модулей становится аэродинамически подобна крылу повышенного удлинения и площади в плане.
Некоторые модули МЛА могут быть выполнены в виде правой и левой консолей крыла самолета, причем часть секций крыла МЛА соединены не только фиксирующими элементами, но и соединительными элементами, которые позволяют в полете изменять взаиморасположение секций крыла. Использование, например, телескопических соединений, позволяет изменять расстояния между секциями крыла после того, как жесткая фиксация прекращается, и использовать полезную аэродинамическую интерференцию между соединенными ими секциями крыла.
Использование гибких соединительных элементов (например, тросов) позволяют легче изменять угловое взаиморасположение секций крыла и других частей ЛА и расстояния между ними после того, как жесткая фиксация прекращается, но они остались соединенными с МЛА.
На крайних внешних секциях правой и левой консолей крыла модулей-самолетов, могут быть также установлены фиксирующие соединительные элементы.
Перед взлетом секции правой и левой консолей крыла МЛА соединены, установлены и зафиксированы так, что крайние внешние секции консолей крыльев МЛА располагаются рядом. Проекции осей консолей на горизонтальную плоскость, образуют замкнутый многоугольник, а замки фиксирующих их соединение элементов, установленных на крайних внешних секциях правой и левой консолей крыла МЛА, обеспечивают образование замкнутого силового контура конструкции МЛА на фазах вертикального полета. После взлета замки, жестко фиксирующие соединения краев внешних секций и относительное положение этих консолей, размыкаются, и края этих секции становятся не соединенными. Изменение в дальнейшем полете положения консолей крыла позволяет получить конфигурацию МЛА аэродинамической схемы моноплан с крылом большего удлинения и площади без увеличения стартовых габаритных размеров и веса.
На фазах горизонтального полета секции крыла соединены гибкими соединительными элементами таким образом, что образованные ими консоли крыла МЛА располагаются аналогично правой и левой консолям крыла самолета с аэродинамической схемой моноплан. Проекции осей консолей МЛА на плоскость, перпендикулярную направлению полета, образуют развернутый угол (около 180 градусов).
Использование гибких соединительных устройств с возможностью полного рассоединения некоторых из них позволяет после того, как жесткая фиксация прекращается, изменять угловое взаиморасположение секций крыла и других частей ЛА и расстояния между ними без применения дополнительных устройств (у прототипа используется система электромоторов, тяг, шарниров).
В вариантах предлагаемого заявителем технического решения для увеличения аэродинамической эффективности используется также увеличение удлинения крыла и крыла ЛА в плане на этапах горизонтального полета, в том числе, за счет применения консолей крыла с секциями гибкой или складной конструкции, например, выполненных с применением мягких тканей, аналогичных используемым в парапланах. Исполнение конструкции, хотя бы одной из секций крыла ЛА, гибкой или складной, позволяет в полете увеличить площадь этой секции в плане и расстояние между левым краем этой секции, который соединен с правым краем соседней секции крыла слева, и правым краем этой секции, который соединен с левым краем соседней секции крыла справа.
В составе ЛА могут быть использованы также модули, которые содержат запас топлива, и/или аккумуляторы электропитания, и/или соединители с кабелями наземного электропитания, и/или подъемные движители со средствами управления, причем соединительные элементы, присоединяющие эти модули к ЛА, выполнены с возможностью полного рассоединения. Это позволяет, после отделения кабелей наземного электропитания или полного отделения этих вспомогательных, подъемных модулей от ЛА, использовать на модулях ЛА, выполняющих крейсерский полет, движители с меньшей потребной тягой, с меньшим весом и расходом топлива.
Осуществление изобретения
Приводимые ниже примеры осуществления технического решения в части реализации технического устройства и исполнения его частей, не ограничивают возможные варианты применения изобретения и предполагают дальнейшее возможное совершенствование специалистами. Особенности устройства системы управления ЛА не меняют сущности изобретения. Также несущественны варианты исполнения стоек шасси ЛА, которые могут быть, в простейшем случае, опорами, являющимися частью конструкции консолей крыла.
Притязания приведены в формуле изобретения.
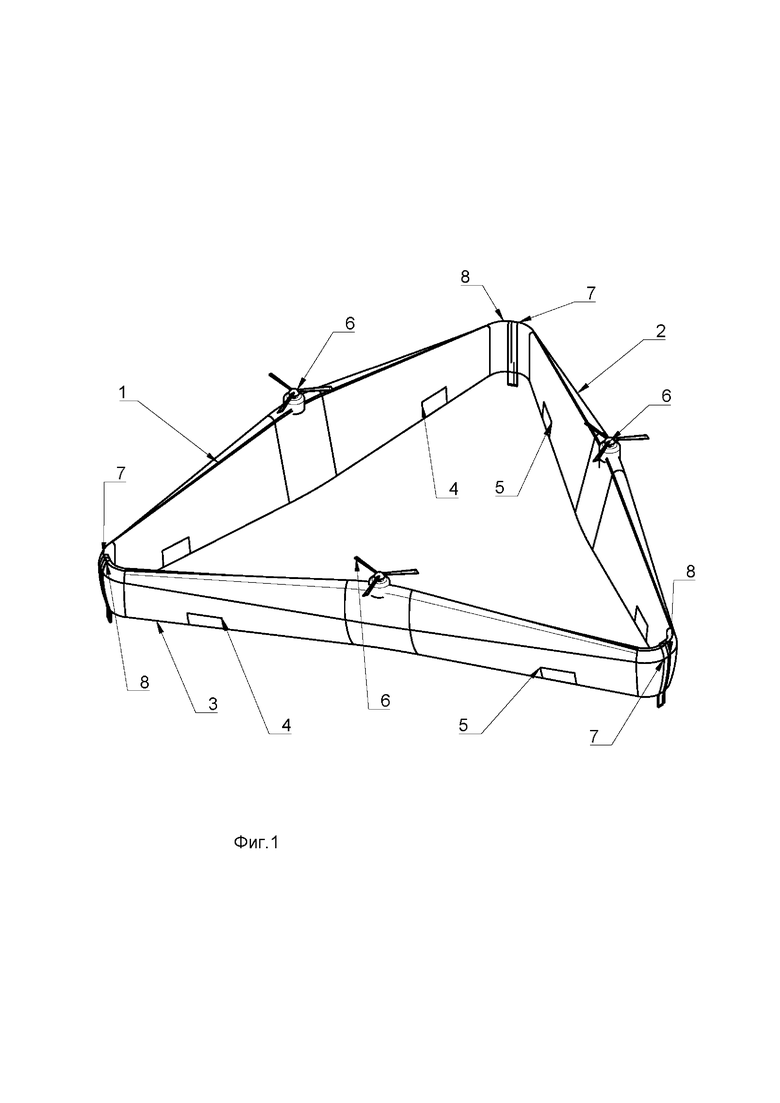
Вариант ТУ 1. ТУ выполнено в виде модульного (составного) ЛА (см. Фиг.1). МЛА содержит несколько идентичных модулей 1, 2, 3, каждый из которых выполнен в виде ЛА с фиксированными консолями крыльев. На левой и правой консолях крыла каждого из модулей имеются элевоны 4 и 5. На каждом из модулей фиксировано установлены движители 6. На внешних секциях левой и правой консоли крыла каждого из модулей 1, 2, 3 установлены фиксирующие устройства 7, 8 (например, типа штырь-конус с электромеханическими замками). Полезная нагрузка размещается во внутренних отсеках модулей 1, 2, 3. В них также размещается автоматическая система управления (автопилот) и/или пилоты.
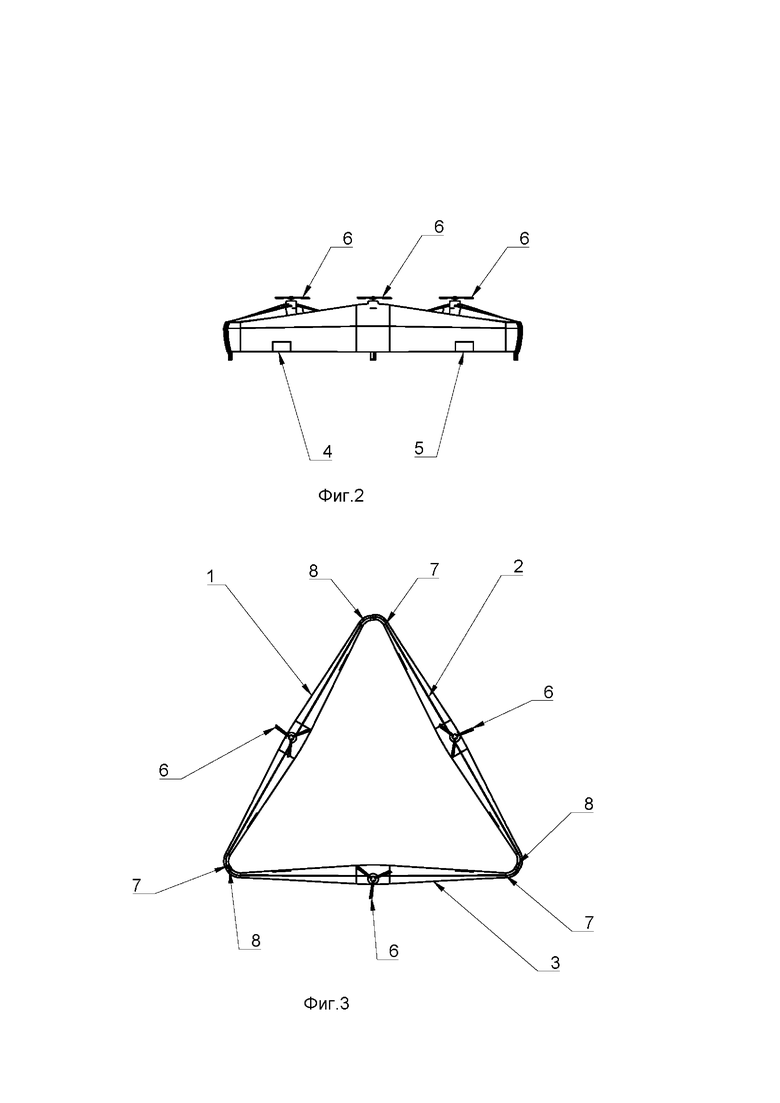
Для вертикального взлета эти модули устанавливаются так, чтобы тяга всех движителей 6 была направлена вверх (см. Фиг.2). Перед взлетом модули 1, 2, 3 устанавливаются, соединяются и фиксируются так, что образуют жесткий замкнутый силовой контур конструкции крыла ЛА, проекция которого на горизонтальную плоскость имеет форму треугольника (см. Фиг.3).
Внешние секции правой консоли (ПК1) крыла первого модуля и левой консоли (ЛК3) крыла модуля 3 соединяются между собой замыкающими фиксирующими устройствами (штырь 7 на конце ПК1 и конус 8 на конце ЛК3) консолей. Аналогично соединяются фиксирующими устройствами 8 и 7 внешние секции левой консоли (ЛК1) крыла первого модуля и правой консоли (ПК2) крыла модуля 2 (штырь 7 на конце ПК2 и конус 8 на конце ЛК1), также соединяются фиксирующими устройствами внешние секции левой консоли (ЛК2) крыла модуля 2 и правой консоли (ПК3) крыла модуля 3 (штырь 7 на конце ПК3 и конус 8 на конце ЛК2). Таким образом, тяга всех движителей 6 обеспечивают подъемную силу, а плечи приложения тяги движителей 6 относительно центра тяжести ЛА обеспечивают потребные моменты управления на этапах вертикального взлета и висения. После начальной фазы взлета, при достижении высоты и скорости ЛА, необходимой для безопасного продолжения полета, осуществляется переход в горизонтальный полет.
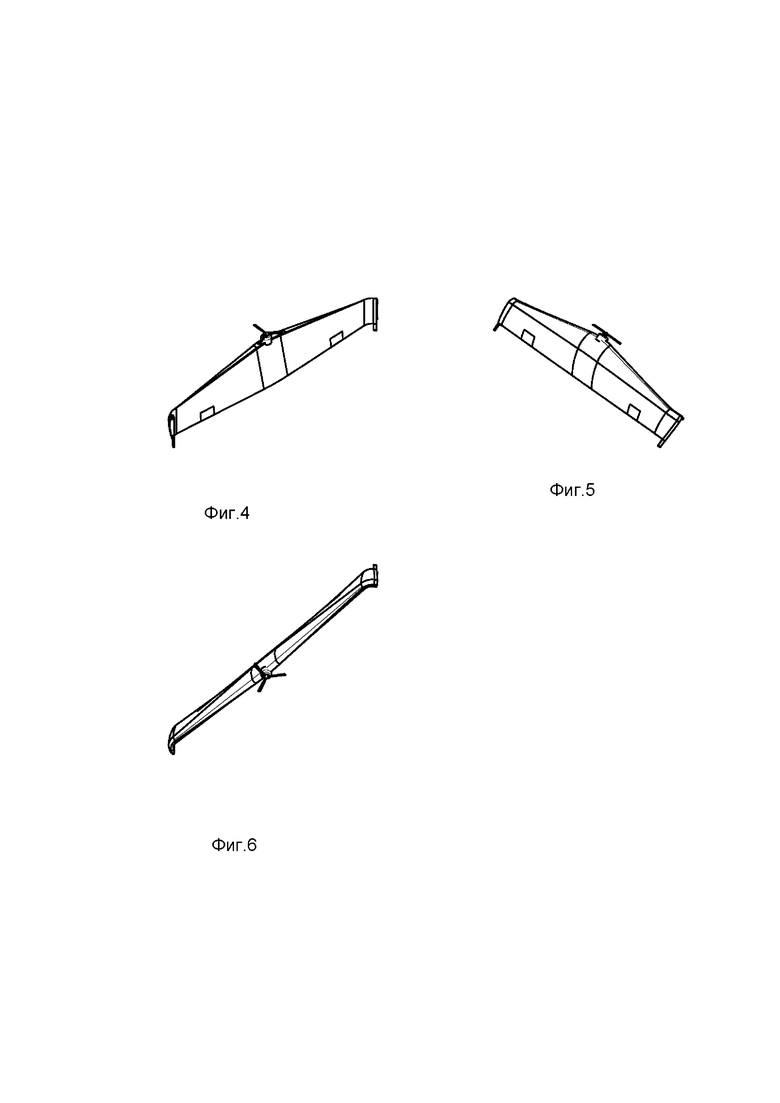
В первом варианте перехода, который можно осуществить даже при нулевой горизонтальной скорости ЛА, замки фиксирующих устройств 7 и 8 на концах консолей модулей 1, 2, 3 ЛА открываются синхронно и составной ЛА разделяется на отдельные модули 1, 2, 3, которые после отделения совершают полет, как самостоятельные ЛА – самолеты аэродинамической схемы летающее крыло. Необходимым условием такого варианта является запас высоты и обеспечение достаточной управляемости модулей 1, 2 и 3 после разделения, необходимые для безопасного продолжения их самостоятельного управляемого полета с дальнейшим увеличением горизонтальной составляющей их воздушной скорости. Для перехода к горизонтальному полету осуществляется независимый поворот каждого модуля 1, 2 и 3 составного ЛА вокруг горизонтальной оси (см. Фиг.4-6).
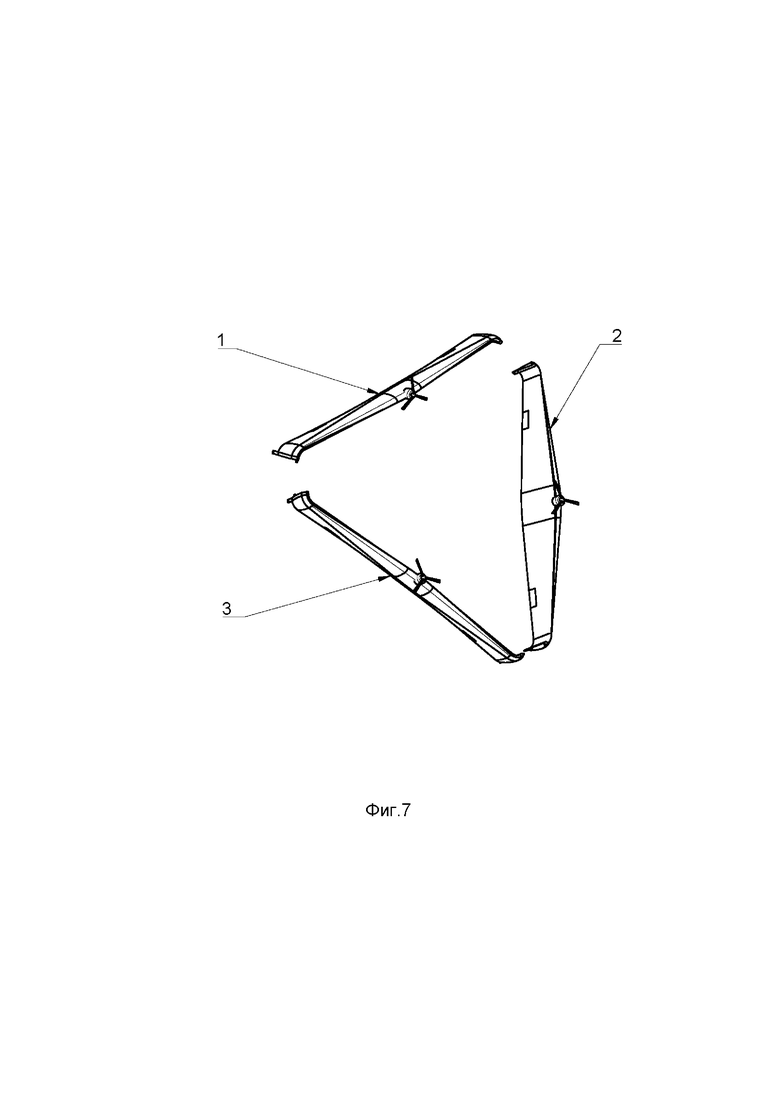
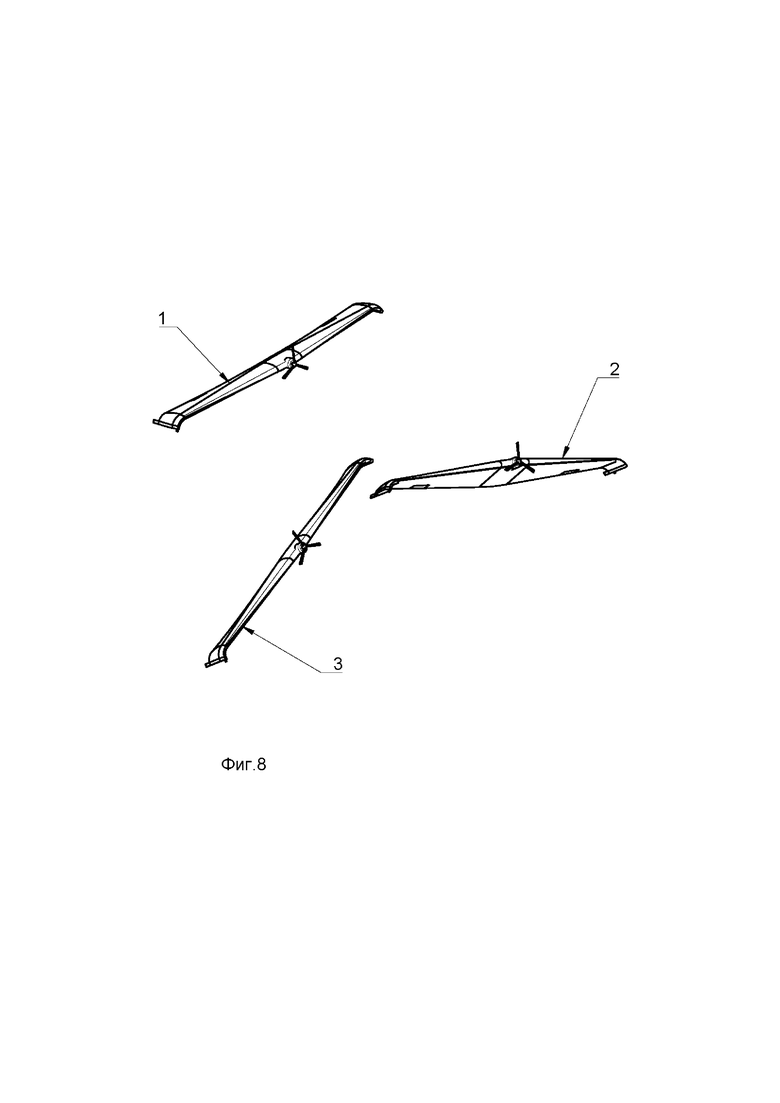
Во втором варианте, переход к горизонтальному полету осуществляется путем поворота всего модульного ЛА вокруг горизонтальной оси. После увеличения воздушной скорости до величины, обеспечивающей управляемость модуля 1, а также соединенных модулей 2 и 3, замки фиксирующих устройств на концах консолей ПК1 и ЛК3, а также ЛК1 и ПК2 модулей ЛА открываются и модуль 1 продолжает горизонтальный полет, как самостоятельный ЛА – самолет (см. Фиг.7). После чего модули 2 и 3 совершают изменение угла крена (поворот вокруг оси, близкой к направлению горизонтального полета) совместно, а затем раздельно (после открытия замков фиксирующих устройств на концах консолей ПК3 модуля 3 и ЛК2 модуля 2). Дальнейший полет модули 2 и 3 совершают, как самостоятельные ЛА – самолеты (см. Фиг.8).
После разделения модулей 1, 2 и 3, управление ими осуществляется, в основном, с помощью аэродинамических устройств систем управления модулей ЛА, например, используются элевоны на консолях крыла модулей.
Таким образом модульный ЛА трансформируется для горизонтального (крейсерского) полета в группу самолетов (состоящих из модулей 1, 2 и 3).
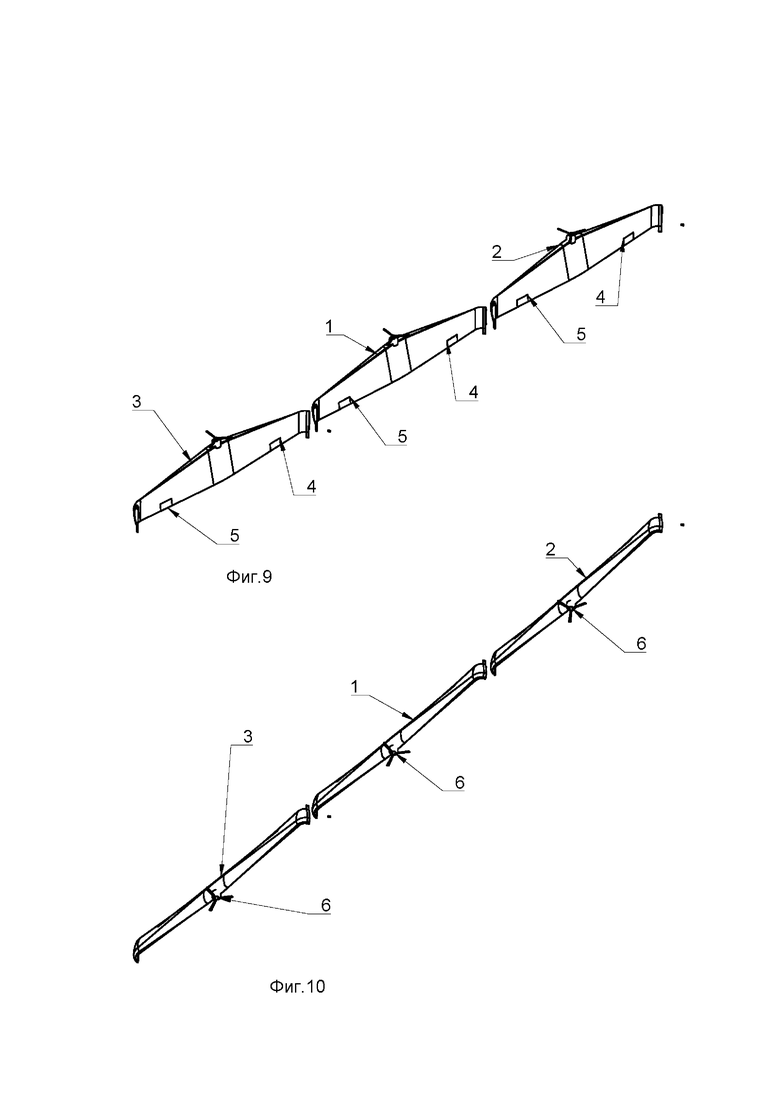
Для увеличения аэродинамической эффективности может использоваться эффект группового полета ЛА крылом к крылу (аналогично полету клина журавлей). Таким образом группа модулей-самолетов модульного ЛА за счет полезной интерференции консолей модулей становится аэродинамически эквивалентна крылу повышенного удлинения и площади в плане (см. Фиг.9-10).
Можно использовать большее количество модулей (например, шесть).
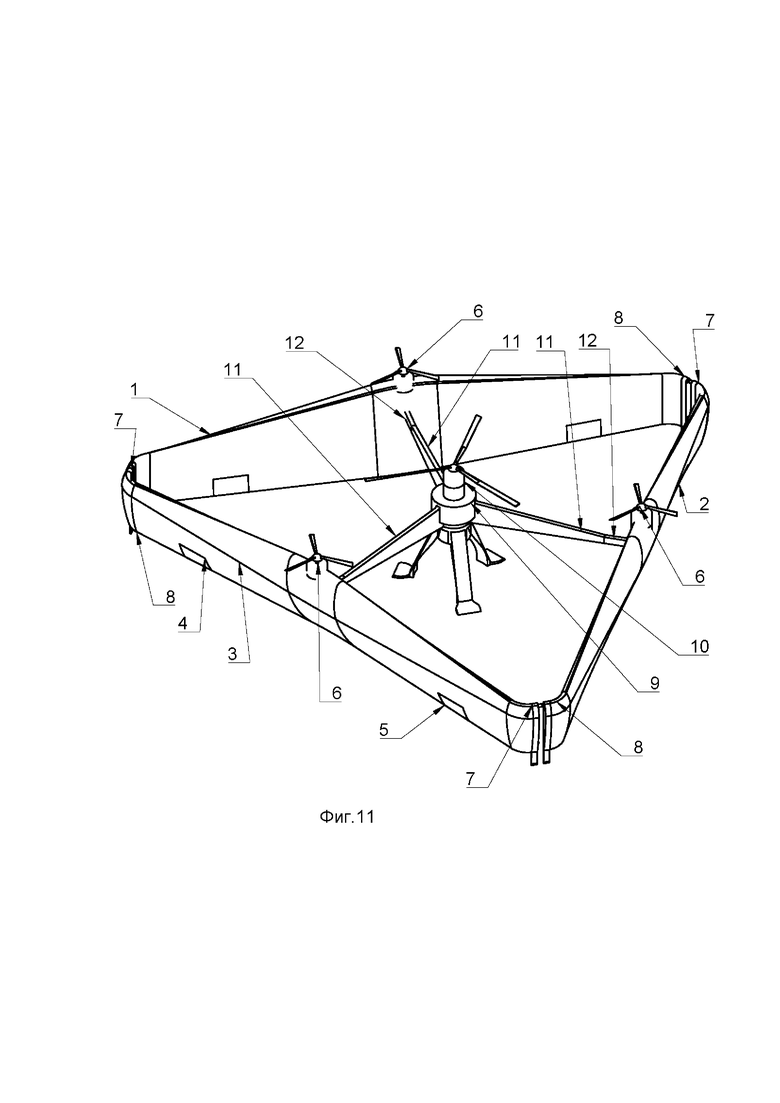
Вариант ТУ 2. ТУ выполнено аналогично варианту 1, в виде модульного ЛА (см. Фиг.11), однако, ТУ также содержит один или несколько подъемно-разгонных модулей 9 с движителями 10 и фиксирующие устройства 11, 12, соединяющие модули 1, 2, 3 с модулями 9 при взлете.
Для вертикального взлета модули 1, 2, 3, 9 устанавливаются так, чтобы тяга их движителей была направлена вверх. Перед взлетом модули 1, 2, 3 устанавливаются, соединяются и фиксируются аналогично варианту ТУ 1 так, что образуют жесткий замкнутый силовой контур конструкции крыла ЛА, проекция которого на горизонтальную плоскость имеет форму треугольника.
Фиксирующие устройства 11 (например, штырь), установленные на модуле 9, соединены с устройствами 12 (например, конус), установленными на модулях 1, 2, 3, и замки фиксирующих устройств жестко фиксируют положение модуля 9 относительно модулей 1, 2 и 3 (см. Фиг.11).
Таким образом, суммарная тяга всех движителей 6 и 10 модулей 1, 2, 3 и 9 ЛА обеспечивает вертикальную подъемную силу, а плечи приложения тяги движителей 6 относительно центра тяжести ЛА и изменения суммарного вектора тяги движителей относительно центра тяжести ЛА обеспечивают потребные моменты управления на фазах вертикального полета и висения. Для управления могут использоваться изменения векторов тяги каждого из движителей 6 и/или 10, а также аэродинамические органы управления (элевоны 4 и 5). После вертикального взлета, при достижении высоты и скорости ЛА, необходимой для безопасного продолжения полета, осуществляется переход в горизонтальный полет.
В первом варианте перехода, который можно осуществить даже при нулевой скорости ЛА, все замки фиксирующих устройств 11, 12, соединяющие модули 1, 2, 3 с модулями 9 открываются синхронно. Модули 9 отделяются от модульного ЛА и продолжают полет самостоятельно. Подъемно-разгонные модули 9 могут получать энергию с земли, для чего они снабжаются соединителями 13 с кабелями наземного электропитания 14.
Замки всех фиксирующих устройств 7 и 8 на концах консолей модулей 1, 2, 3 ЛА открываются и составной ЛА разделяется на отдельные модули 1, 2, 3, которые после отделения совершают полет, как самостоятельные ЛА - самолеты. Необходимым условием такого варианта является запас высоты и обеспечение достаточной управляемости модулей 1, 2 и 3 после разделения, необходимые для безопасного продолжения их независимого управляемого полета. Переходы к горизонтальному полету каждого модуля-самолета 1, 2 и 3 осуществляются независимо путем поворота модуля-самолета вокруг горизонтальной оси (см. Фиг.4-6).
Во втором варианте, после фазы вертикального взлета весь модульный ЛА путем поворота вокруг горизонтальной оси переводится в фазу увеличения воздушной скорости. Модули ЛА, которые будут переходить в фазу горизонтального полета, отсоединяются от остальных частей ЛА и друг от друга, после достижения потребной воздушной скорости, обеспечивающей достаточную управляемость модулей для перехода и продолжения безопасного крейсерского полета в составе ЛА или группы ЛА. После отделения модулей 9, аналогично первому варианту, и увеличения воздушной скорости модулей 1, 2 и 3 до величины, обеспечивающей их управляемость, замки фиксирующих устройств на концах консолей ПК1 и ЛК3, а также ЛК1 и ПК2 модулей ЛА открываются и модуль 1 продолжает горизонтальный полет, как самостоятельный ЛА - самолет. После чего модули 2 и 3 совершают изменение угла крена (поворот вокруг оси, близкой к направлению горизонтального полета) совместно, а затем раздельно (после открытия замков фиксирующих устройств на концах консолей ПК3 модуля 3 и ЛК2 модуля 2). Дальнейший полет модули 2 и 3 также совершают, как самостоятельные ЛА – самолеты (см. Фиг.8).
Во третьем варианте, переход к горизонтальному полету осуществляется путем поворота всего модульного ЛА, включающего в себя модули 1, 2, 3 и 9, вокруг горизонтальной оси до угла, обеспечивающего ускоренный набор воздушной скорости с пикированием. После увеличения воздушной скорости до величины, обеспечивающей управляемость модулей 1, 2 и 3, модули 9 отделяются и продолжают полет самостоятельно.
Затем, модули 1, 2, 3 переходят из пикирования в горизонтальный полет совместно, или по раздельности. После разделения модулей 1, 2, 3, они совершают полет, как самостоятельные ЛА - самолеты.
Таким образом модульный ЛА трансформируется в группу самолетов (состоящую из модулей 1, 2 и 3) для продолжения крейсерского полета. Для управления самолетами используются элевоны систем управления модулей 1, 2 и 3.
Модули 9 после отделения от модульного ТУ продолжают полет самостоятельно, например, как ЛА вертикального взлета и посадки, или совершают вертикальную посадку на режиме авторотации или на парашютах.
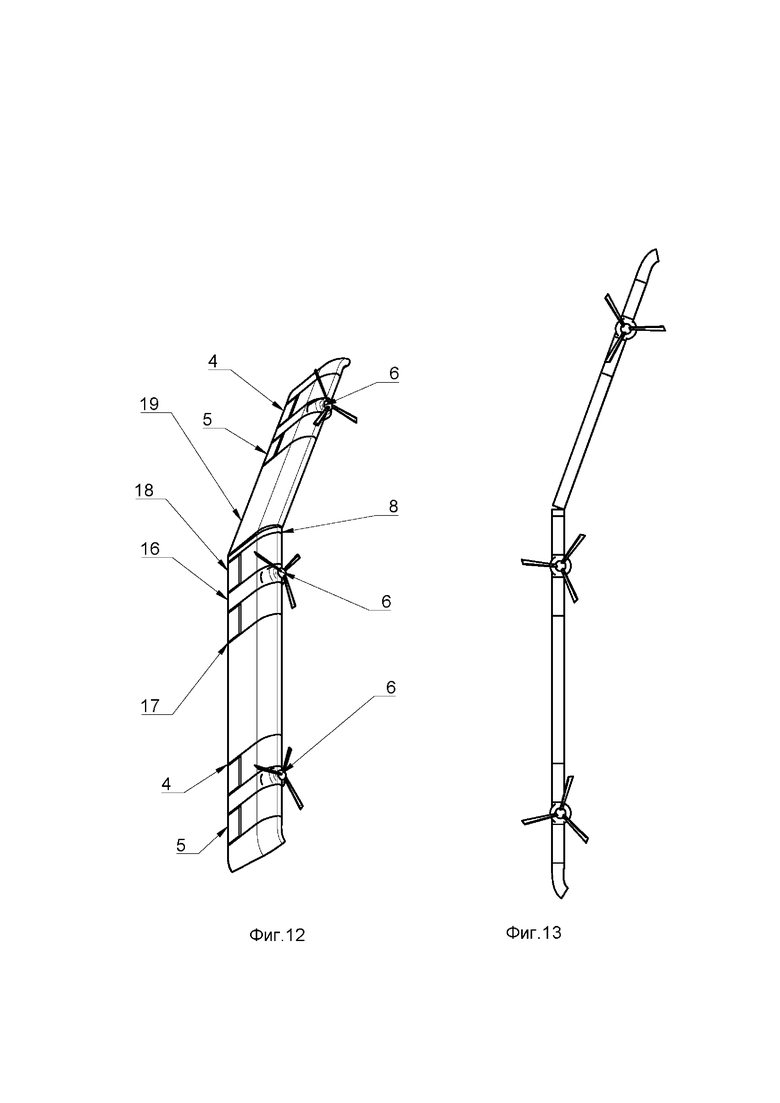
Вариант ТУ 3. ТУ выполнено в виде ЛА, содержащем множество секций крыла, образующих центроплан 16 и две консоли (см. Фиг.12) 17 и 18 крыла, которые постоянно зафиксированы, аналогично самолету аэродинамической схемы моноплан. На консолях и центроплане фиксировано установлены движители 6, которые создают тягу. Имеются устройства системы управления ЛА, которые позволяют изменять величину тяги движителей, а также угол отклонения аэродинамических управляющих поверхностей (элевонов 4 и 5). Часть секций левой консоли крыла 18 образуют поворотный модуль 19, который может изменять своё положение относительно других частей ЛА и поворачиваться вокруг оси, направленной вдоль продольной оси ЛА за счет того, что правый край крайней правой секции модуля 19 прикреплен к крайней левой секции фиксированной части левой консоли крыла 18 соединительными элементами 15 (например, гибкими тросами), которые позволяют изменять угловое взаиморасположение секций крыла и расстояние между секциями. Благодаря фиксирующим устройствам 7, 8 модуль 19 может также фиксироваться в заданных положениях.
Для этапов вертикального взлета МЛА, включая модуль 19, устанавливается и фиксируется в таком положении, чтобы суммарная тяга движителей 6 обеспечивала вертикальную подъемную силу (см. Фиг.13). Модуль 19 зафиксирован устройствами 7, 8 в повернутом относительно постоянно зафиксированной части левой консоли крыла 18 положении таким образом, что плечо вектора тяги движителей 6, установленных на модуле 19, относительно центра тяжести ЛА обеспечивает потребные моменты управления. При повороте части 19 положение центра тяжести ЛА смещается и, благодаря этому, изменяются плечи не только вектора тяги движителя 6 модуля 19, но и векторов тяги движителей 6, фиксировано установленных на консоли 17 и центроплане 16.
После вертикального взлета осуществляется управляемый поворот всего ЛА вокруг горизонтальной оси, фиксация модуля 19 в отклоненном положении относительно левой консоли 18 прекращается. Под действием внешних сил и тяги движителей 6 модуль 19 поворачивается относительно левой консоли 18 вокруг оси, направленной вдоль продольной оси ЛА.
Для этапов крейсерского горизонтального полета модуль 19 фиксируется таким образом, чтобы он располагался аналогично внешним секциям правой консоли 17 крыла ЛА. Такое изменение положения частей крыла позволяет получить конфигурацию ЛА аэродинамической схемы моноплан с крылом большего удлинения и площади в плане, чем достигается увеличение аэродинамической эффективности. Потребные моменты управления на этапах крейсерского горизонтального полета обеспечиваются традиционными для самолетов аэродинамическими органами управления, например, элевонами 4 и 5. Моменты от тяги движителей 6 также могут использоваться, например, для управления полетом ЛА по курсу.
Изменение положения модуля 19 левой консоли 18 относительно других частей ЛА достигается за счет инерционных сил, веса, изменением внешних сил с помощью (аэродинамических и/или газодинамических) устройств управления на консолях, которые используются также и для управления полетом всего ЛА. Для управления степенью фиксации положения частей консоли используются простые устройства 7, 8 (например, типа штырь-конус с механическими защелками или с электромеханическими замками).
Можно использовать большее количество поворотных частей консолей 17 и 18 (например, шесть). На внешних крайних секциях левой и правой консоли крыла могут быть установлены фиксирующие устройства 7,8 (например, типа штырь-конус с электромеханическими замками) для замыкания силового контура конструкции крыла ЛА, аналогично ТУ, выполненному по варианту 1, или 2.
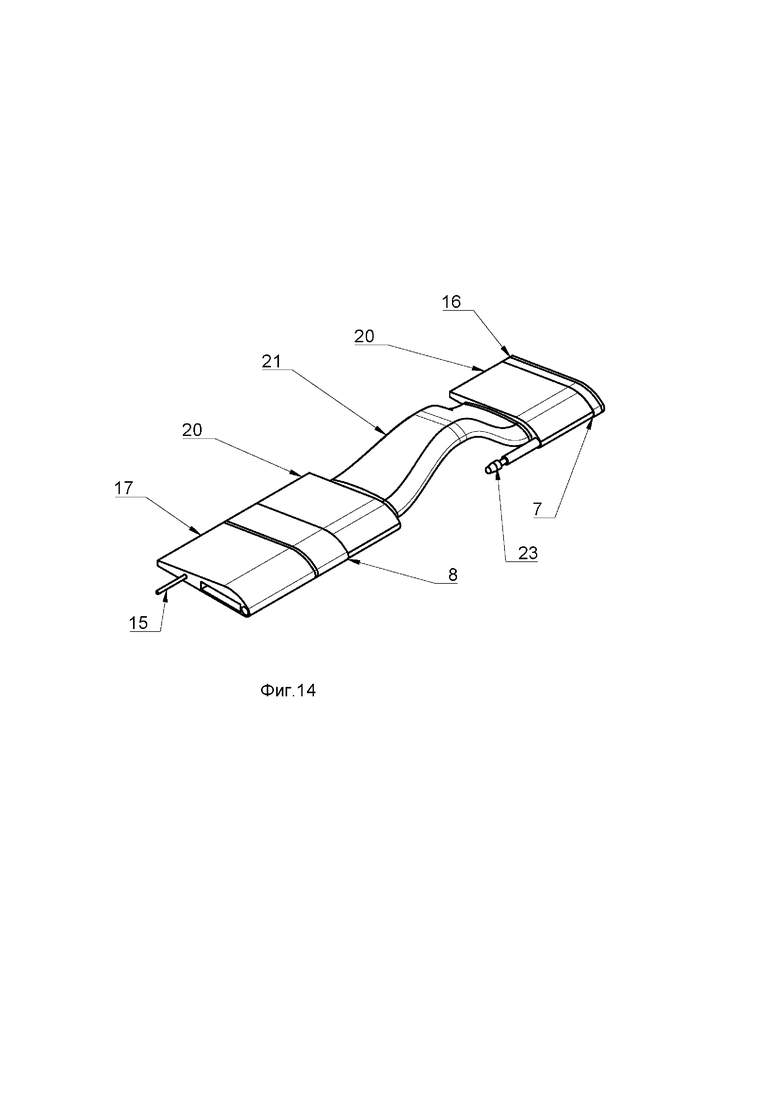
Вариант ТУ 4. ТУ выполнено аналогично варианту 3, однако, не только соединительные элементы 15, но и часть секций крыла выполнены гибкими. Например, секция 21 консоли 17 и секция 22 модуля 19 МЛА могут быть выполнены из ткани, аналогично мягкому крылу параплана. Перед взлетом ЛА секции 21 и 22 находятся в сложенном состоянии, например, во внутренних отсеках секций 20 жесткой конструкции центроплана 16 и консолей крыла 17, 18 и модуля 19. Внутренние края секции 21 присоединены к внешним краям секции 20 центроплана 16 гибкими соединительными элементами 15, например, тросами. Внешние края секции 21 аналогично присоединены тросом 15 к внутренним краям секций 20 консоли 17. Аналогично тросами к жестким секциям модуля 19 присоединяется секция 22.
Устройства 7, 8 фиксирующего стыковочных узлов МЛА, после их стяжки и фиксации, обеспечивают увеличенную жесткость конструкции консолей крыла. После открытия замков фиксирующих устройств, расстояния между соседними жесткими секциями 20 центроплана и боковых консолей 17 и модуля 19 крыла МЛА, соединенными элементами 15, увеличивается. Мягкие части секций 21 и 22 разворачиваются, подобно мягкому крылу параплана (см. Фиг.14). Штыри устройств 7 фиксирующих стыковочных узлов МЛА убираются внутрь секций 20.
Соединительные элементы 15, мягкие части секций 21 и 22, позволяют жестким частям консоли 17 также поворачиваться относительно центроплана 16 ЛА, а жестким частям модуля 19 поворачиваться относительно друг друга.
Таким образом обеспечивается дополнительное увеличение не только удлинения крыла ЛА, но и его площади, что даёт соответственное увеличение располагаемой подъёмной силы ЛА.
Краткое описание чертежей.
Фиг.1. Вид МЛА по варианту 1 осуществления ТУ.
Фиг.2. Вид МЛА по варианту 1 перед взлетом.
Фиг.3. Вид сверху на МЛА по варианту 1 перед взлетом.
Фиг.4. Вид отделившегося модуля на фазах вертикального полета.
Фиг.5. Переход отделившегося модуля к разгону.
Фиг.6. Переход отделившегося модуля в горизонтальный полет.
Фиг.7. Переход МЛА из 3-х модулей в горизонтальный полет с последующим разделением.
Фиг.8 Переход 3-х модулей МЛА к крейсерскому полету после разделения.
Фиг.9 Группа самолетов из 3 модулей МЛА в горизонтальном полете (вид снизу).
Фиг.10. Группа самолетов из 3 модулей МЛА в горизонтальном полете (вид спереди).
Фиг.11. Вид МЛА по варианту 2.
Фиг.12. Вид МЛА по варианту 3.
Фиг.13. Вид сверху на МЛА по варианту 3 на фазах вертикального полета.
Фиг.14. Вид секции 21 гибкой конструкции МЛА по варианту 4.
Изобретение относится к области авиации, в частности к конструкциям составных модульных летательных аппаратов. Модульный летательный аппарат (МЛА) с вертикальным взлётом включает не менее двух модулей, содержащих фиксированно установленные на модулях движители, устройства управления, секции крыла, соединительные устройства. Соединительные устройства включают в себя фиксирующие элементы, жесткие и гибкие соединительные элементы, позволяющие как жестко зафиксировать консоли крыльев соседних модулей в положении, при котором проекции их продольных осей на плоскость, перпендикулярную направлению полета МЛА, образуют углы, близкие к 180 градусам, так и изменять угловое расположение и расстояние между секциями крыла модулей МЛА, что позволяет изменять относительное положение модулей МЛА с помощью движителей и устройств управления модулей для изменения конфигурации МЛА от состояния взлета к состоянию горизонтального полёта МЛА и разъединения модулей. Обеспечивается увеличение аэродинамической и весовой эффективности МЛА с вертикальным взлётом. 3 н. и 5 з.п. ф-лы, 14 ил.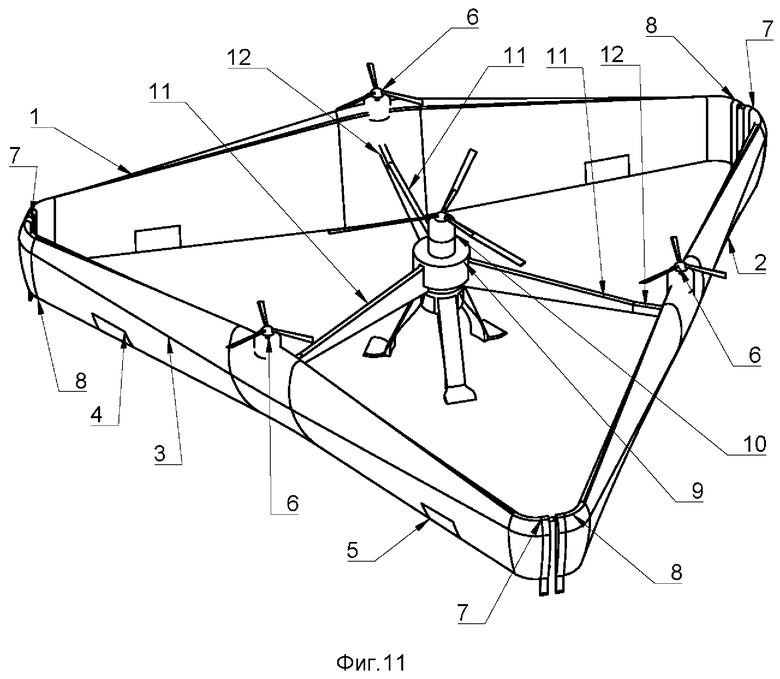
1. Модульный летательный аппарат (МЛА) с вертикальным взлётом, включающий не менее двух модулей, содержащих фиксированно установленные на модулях движители, создающие тягу, устройства управления, которые позволяют изменять величину и направление сил и моментов, действующих на модуль, секции крыла, которые выполнены в виде тел, имеющих форму, обеспечивающую создание поперечной аэродинамической силы, соединительные элементы, обеспечивающие связь между частями модуля, в том числе имеются жесткие соединительные элементы, которые постоянно соединяют и неподвижно фиксируют последовательно расположенные соседние секции крыла, образуя правую и левую консоли крыла модуля, а также соединяют и неподвижно фиксируют консоли с модулем, также имеются соединительные устройства, включающие в себя жесткие соединительные элементы и фиксирующие элементы, причем устройства выполнены с возможностью полного рассоединения соединительных элементов этих устройств и снятия жесткой фиксации относительного положения консолей, при этом соединительные устройства соединяют крайние секции консолей, начиная с соединения правой консоли крыла крайнего левого из модулей и левой консоли крыла соседнего модуля, расположенного справа, и далее, вплоть до соединения левой консоли крайнего правого модуля и правой консоли крыла предыдущего модуля, причем имеются соединительные устройства, которые жестко фиксируют консоли крыльев соседних модулей в таком относительном положении, что проекции их продольных осей на плоскость, перпендикулярную направлению полета МЛА, образуют углы меньше 180 градусов настолько, что делает величину плеч векторов тяги движителей модулей относительно центра массы МЛА достаточными для создания потребных изменений суммарных сил и моментов управления полетом МЛА путем изменения величин тяги движителей модулей, а направление и величина суммарного вектора тяги движителей модулей обеспечивают достаточную подъемную силу для вертикального взлета МЛА, отличающийся тем, что также имеются соединительные устройства, которые могут жестко зафиксировать консоли крыльев соседних модулей в таком относительном положении, что проекции их продольных осей на плоскость, перпендикулярную направлению полета МЛА, образуют углы, настолько близкие к 180 градусам, чтобы сумма поперечных аэродинамических сил консолей модулей обеспечивала достаточную подъемную силу для выполнения горизонтального полёта МЛА, и имеются соединительные устройства, включающие в себя фиксирующие элементы, жесткие и гибкие соединительные элементы, позволяющие изменять угловое взаиморасположение и расстояние между секциями крыла модулей МЛА в пределах, заданных этими устройствами, что позволяет, после рассоединения жестких соединительных элементов и снятия жесткой фиксации относительного положения консолей соседних модулей, изменять относительное положение модулей МЛА с помощью движителей и устройств управления модулей, что обеспечивает изменения конфигурации МЛА от состояния с фиксированным для взлета МЛА расположением модулей к состоянию с фиксированным для горизонтального полёта МЛА, расположением модулей с помощью движителей модулей, устройств управления и соединительных устройств модулей.
2. МЛА по п.1, отличающийся тем, что несколько или хотя бы одна из секций крыла выполнены гибкой или складной конструкции, которая позволяет в полете увеличить площадь этой секции в плане и расстояние между левым краем этой секции, который соединен с правым краем соседней секции крыла слева, и правым краем этой секции, который соединен с левым краем соседней секции крыла справа.
3. Модульный летательный аппарат (МЛА) с вертикальным взлётом, включающий не менее двух модулей, содержащих фиксированно установленные на модулях движители, создающие тягу, устройства управления, которые позволяют изменять величину и направление сил и моментов, действующих на модуль, секции крыла, которые выполнены в виде тел, имеющих форму, обеспечивающую создание поперечной аэродинамической силы, соединительные элементы, обеспечивающие связь между частями модуля, в том числе имеются жесткие соединительные элементы, которые постоянно соединяют и неподвижно фиксируют последовательно расположенные соседние секции крыла, образуя правую и левую консоли крыла модуля, а также соединяют и неподвижно фиксируют консоли с модулем, также имеются соединительные устройства, включающие в себя жесткие соединительные элементы и фиксирующие элементы, причем устройства выполнены с возможностью полного рассоединения соединительных элементов этих устройств и снятия жесткой фиксации относительного положения консолей, при этом соединительные устройства соединяют крайние секции консолей, начиная с соединения правой консоли крыла крайнего левого из модулей и левой консоли крыла соседнего модуля, расположенного справа, и далее вплоть до соединения левой консоли крайнего правого модуля и правой консоли крыла предыдущего модуля, причем имеются соединительные устройства, которые жестко фиксируют консоли крыльев соседних модулей при взлете в таком относительном положении, что проекции их продольных осей на плоскость, перпендикулярную направлению полета МЛА, образуют углы меньше 180 градусов настолько, что делает величину плеч векторов тяги движителей модулей относительно центра массы МЛА достаточными для создания потребных изменений суммарных сил и моментов управления полетом МЛА путем изменения величин тяги движителей модулей, а направление и величина суммарного вектора тяги движителей модулей обеспечивают достаточную подъемную силу для вертикального взлета МЛА, отличающийся тем, что несколько или хотя бы одна из секций крыла МЛА выполнены гибкой или складной конструкции, которая позволяет в полете увеличить площадь этой секции в плане и расстояние между левым краем этой секции, который соединен с правым краем соседней секции крыла слева, и правым краем этой секции, который соединен с левым краем соседней секции крыла справа, а степень жесткости фиксации модулей может изменяться в полете.
4. МЛА по любому из пп.1-3, отличающийся тем, что полное рассоединение всех соединительных устройств некоторых соседних модулей приводит к разъединению МЛА на отдельные модули, после чего они могут свободно изменять своё положение, причем часть из этих модулей выполнена таким образом, что после разъединения могут управлять своим полетом с помощью своих движителей и устройств управления полетом, продолжить и/или завершить полет самостоятельно.
5. МЛА по любому из пп.1-4, отличающийся тем, что соединительные устройства, выполненные с возможностью полного рассоединения и снятия фиксации относительного положения консолей, также соединяют и фиксируют левый край левой секции консоли крыла крайнего левого из модулей МЛА и правый край правой секции консоли крыла крайнего правого модуля МЛА, образуя из консолей крыла модулей замкнутый контур крыла МЛА, жестко зафиксированный на фазах вертикального взлета, а в дальнейшем полете фиксация и соединение этих секций консолей крыла модулей прекращается.
6. МЛА по любому из пп.1-5, отличающийся тем, что в МЛА имеются модули, которые содержат запас топлива, и/или аккумуляторы электропитания, и/или соединители с кабелями наземного электропитания, и/или подъемные движители со средствами управления, причем соединительные элементы, присоединяющие эти модули к МЛА, выполнены с возможностью полного рассоединения.
7. Способ вертикального взлёта МЛА, выполненного по любому из пп.1-6, отличающийся тем, что перед взлетом модули МЛА соединены, установлены и зафиксированы так, чтобы суммарная тяга движителей МЛА обеспечивала достаточную для вертикального взлета вертикальную подъемную силу, а изменения суммарного вектора тяги движителей относительно центра тяжести МЛА обеспечивали потребные моменты управления на фазах вертикального полета и висения, причем после фазы вертикального взлета модули МЛА, которые переходят в фазу горизонтального крейсерского полета, отсоединяются друг от друга и/или от остальных частей МЛА, которые могут продолжить и/или завершить полет самостоятельно.
8. Способ вертикального взлета МЛА по п.7, отличающийся тем, что после фазы вертикального взлета весь МЛА путем поворота вокруг горизонтальной оси переводится в фазу увеличения воздушной скорости с возможной потерей высоты, а модули МЛА, которые будут переходить в фазу горизонтального полета, отсоединяются друг от друга и/или от остальных частей МЛА после достижения потребной воздушной скорости, обеспечивающей достаточную управляемость модулей для безопасного перехода в крейсерский полет самостоятельно, или в составе группы летательных аппаратов.
| US 20180273170 A1, 27.09.2018 | |||
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ СИСТЕМ КОРАБЕЛЬНО-АВИАЦИОННЫХ РАКЕТНЫХ | 2020 |
|
RU2748042C1 |
| US 20150353197 A1, 10.12.2015 | |||
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОРАБЕЛЬНЫХ АВИАЦИОННО-РАКЕТНЫХ СИСТЕМ | 2020 |
|
RU2750586C1 |
| US 11046434 B2, 29.06.2021 | |||
| US 20200033851 A1, 30.01.2020. | |||

