Изобретение относится к транспортному машиностроению и касается воздушного движителя, выполненного в виде воздушного винта.
Уровень техники определяется фактически монопланными винтами с ограниченным числом лопастей большого диаметра. Способ повышения силы тяги винта связан с увеличением числа лопастей винта, а повышение КПД достигается уменьшением сопротивления дополнительных аэродинамических несущих (рабочих) поверхностей в воздушной среде в дозвуковом диапазоне скоростей концевых элементов лопастей винта.
Аналогом осуществления указанного способа являются так называемые тандемные винты и решетчатые крылья [1]. Как известно, главным недостатком этих крыльев является более низкое аэродинамическое качество, чем монопланных, на дозвуковых скоростях. Наибольшее практическое значение представляют несущие, стабилизирующие и рулевые решетчатые поверхности [1, 2].
Описание прототипа и его недостатков
К ближайшим аналогам можно отнести многолопастные винты значительного диаметра самолетов и винтокрылые несущие и подъемные устройства вертолетов, отличающиеся исключительно большими диаметрами и малой поперечной жесткостью. При конструктивных ограничениях на диаметр винта и связанным с этим уменьшением сметаемой площади снижается сила тяги винта (подъемная сила), что является основным недостатком монопланных винтов малого диаметра. Недостатком многолопастных винтов является снижение КПД винта, связанное с возрастанием аэродинамического сопротивления таких винтов в осевом направлении. Снижение КПД винта ведет к увеличению расходов топлива, уменьшению дальности полета, грузоподъемности летательного аппарата и т.п. Недостатком винтокрылых конструкций являются разнородные продольные и поперечные колебания, снижающие безопасность эксплуатации вертолетов, особенно в пересеченной местности и в горных условиях (явление «земного резонанса» и т.п.).
Технической задачей, на решение которой направлен данный способ, является увеличение силы тяги воздушного винта при уменьшении длины его базовых лопастей и повышение его КПД с соответствующей экономией топлива. Увеличение силы тяги и повышение КПД достигается за счет дополнительных полипланных несущих поверхностей, присоединяемых к несущим поверхностям базовых лопастей и обеспечивающих достижение требуемых и, прежде всего, экономичных режимов движения летательного аппарата, например крейсерской скорости полета самолета или скороподъемности вертолета. При этом учитывается, что поглощаемая винтом мощность пропорциональна третьей степени числа оборотов винта и пятой степени диаметра винта. При постоянных значениях числа оборотов, диаметра винта и угла атаки лопастей поглощаемая мощность возрастает приблизительно пропорционально величине отношения развернутой поверхности базовых лопастей винта к величине сметаемой им площади. В результате мощность, поглощаемая винтом, приблизительно пропорциональна числу базовых лопастей винта [2], если дополнительные полипланные устройства не увеличивают развернутую поверхность базовых лопастей винта. Вместе с тем, задача ограничения диаметра винта возникает на гидросамолетах [4] и некоторых машинах, относящихся к нетрадиционным конструкциям летательных аппаратов, например к аэромобилям, т.е. к транспортным средствам, преобразуемым в летательный аппарат по патенту РФ №2169085 [5].
Сущность способа повышения силы тяги и КПД многолопастного воздушного винта с ограниченным (заданным) диаметром сметаемой площади винта состоит в том, что расчетным методом выбирают оптимальное число монопланных базовых лопастей винта, обеспечивающих максимальный КПД и соответствующую этому КПД тяговую силу при заданной дозвуковой, например крейсерской скорости полета летательного аппарата, определяют невязку потребной и расчетной сил тяги, компенсируют полученную невязку тонкостенными полипланными несущими (рабочими) поверхностями, присоединяемыми к базовым лопастям преимущественно на стороне, обращенной в направлении полета (подъема) при условии непревышения скорости звука окружными скоростями концов базовых лопастей винта и полипланных несущих поверхностей:
D·nmax≤6000, где D - ограниченный (заданный) диаметр сметаемой площади в м, а nmax - максимальная скорость вращения воздушного винта, об/мин. Указанные существенные признаки способа дополняются организацией взаимодействия воздушного винта с силовой установкой (двигателем).
С целью минимизации расхода топлива силовой установкой скорость вращения винта, обеспечивающая крейсерский режим движения полета летательного аппарата, выбирается соответствующей числу оборотов силовой установки при минимальном удельном расходе топлива, с допустимым отклонением на уровне минус 5-10%.
В целях расширения скоростных режимов движения летательного аппарата скорость вращения винта, соответствующая крейсерскому режиму движения полета летательного аппарата, выбирается меньше числа оборотов силовой установки при минимальном удельном расходе топлива с условием, что соответствующий удельный расход топлива силовой установки не будет превышать минимальный удельный расход топлива больше, чем на 5-10%.
В целях расширения скоростных режимов движения летательного аппарата скорость вращения винта, соответствующая режиму движения с максимальной скоростью, выбирается больше числа оборотов силовой установки при минимальном удельном расходе топлива с условием, что соответствующий удельный расход топлива силовой установки не будет превышать минимальный удельный расход топлива больше, чем на 5-10%.
При этом на крейсерском режиме движения полета и при более высоких скоростях, ограниченных максимальным числом оборотов винта по указанной выше гиперболической зависимости от диаметра винта D, существуют близкие к оптимальным соотношения геометрических параметров полипланных несущих поверхностей:
bпп≤bлв, где bпп и bлв - соответственно хорды планов и базовой лопасти винта;  где
где  с - толщина плана;
с - толщина плана;  где
где  t - шаг планов; λпп=l/bпп, где l - длина планов, l=(0,2-0,3)·D; ν=6°-10°, где ν - заострение кромок планов; m≤8, где m - число планов в одной обойме при m≤4, для m=5-8 полипланное устройство может быть размещено по обе стороны базовой лопасти; Н=(m+1)·t, где Н - высота полипланного устройства.
t - шаг планов; λпп=l/bпп, где l - длина планов, l=(0,2-0,3)·D; ν=6°-10°, где ν - заострение кромок планов; m≤8, где m - число планов в одной обойме при m≤4, для m=5-8 полипланное устройство может быть размещено по обе стороны базовой лопасти; Н=(m+1)·t, где Н - высота полипланного устройства.
От указанных параметров зависят аэродинамические нагрузки на планы, увеличение силы тяги и КПД.
Приведенные параметры отображены на фиг.1, 2, 3, 5, 6. Следовательно, общее число планов по данному способу  где k - число базовых лопастей винта.
где k - число базовых лопастей винта.
Вместе с тем, сущность данного способа, выражаемая связью кинематических характеристик воздушного винта и поглощаемой им мощности с энергетическими характеристиками силового агрегата (двигателя), представляется при некоторых допущениях следующим балансом мощностей:
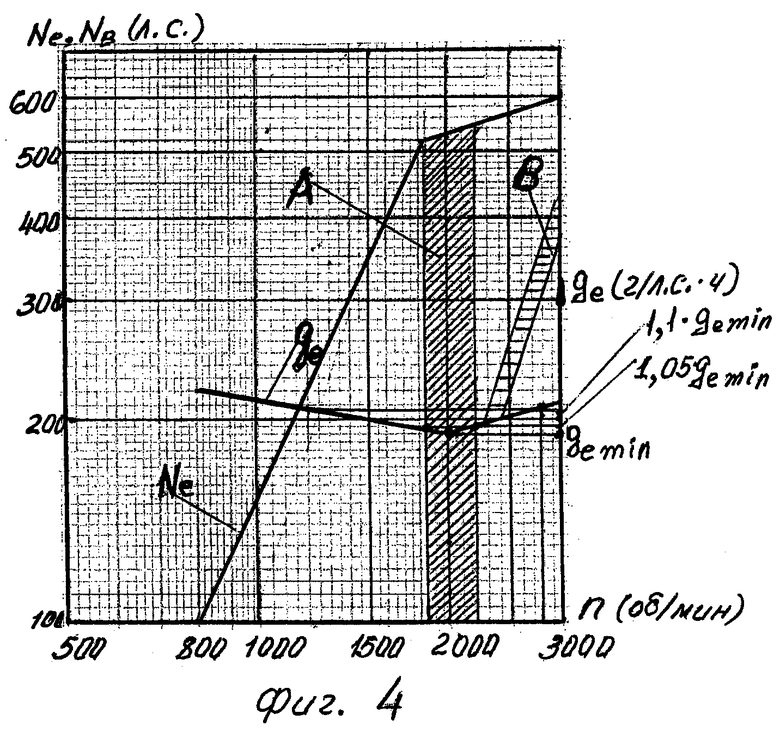
Nт=Ne-Nв, где Nт - мощность силы тяги воздушного винта при заданной скорости полета, Ne - мощность силового агрегата на соответствующем режиме полета и Nв - мощность, поглощаемая воздушным винтом и затрачиваемая на аэродинамическое сопротивление вращению винта. При этом расход топлива силовым агрегатом дается через удельный расход топлива ge(г/л.c. · час): Gт=ge·Ne·10-3, где Gт - часовой расход топлива (кг/час). Указанные взаимосвязи отображает фиг.4.
Следовательно, отношение Nт к сумме Nт+Nв дает принципиальную возможность определения КПД способа и устройства для его осуществления, причем как расчетным, так и опытным путем. Увеличение в разы силы тяги на базе полипланной конструкции воздушного винта сопровождается и повышением его аэродинамического сопротивления. Однако повышение соответствующей поглощаемой мощности отстает от повышения силы тяги и Nт, поэтому КПД имеет тенденцию роста при указанных величинах т, т.е. числа планов в полипланном устройстве воздушного винта.
Таким образом, данный способ повышения силы тяги и КПД воздушного винта определяет более высокий уровень техники в рассматриваемой области, возможность его промышленного производства и использования в разных условиях эксплуатации. Это дает основания для защиты способа в качестве промышленной собственности.
Связь существенных признаков способа с решением технической задачи
Причинами ограничения диаметра воздушного винта могут служить разнородные требования производства и эксплуатационного использования летательного аппарата. В любом случае учет тактико-технических требований и связанный с этим диаметр винта приводят, в случае монопланных лопастей воздушного винта, к уменьшению тяговой или толкающей силы. Это вызывает необходимость увеличивать число воздушных винтов и, соответственно, силовых установок на летательном аппарате для обеспечения потребной скорости полета и скороподъемности. При этом, однако, могут возникать непредвиденные технические противоречия. Например, на гидросамолетах [4] размещение на крыльях винтомоторных агрегатов обусловливает увеличение пикирующего момента от сил тяги, что требует соответствующей компенсации противоположно действующим моментам стабилизатора. Следовательно, наличие упомянутых противоречий влечет за собой дополнительные проблемы технического и экономического характера. В связи с отмеченным, применение полипланных лопастей винта может позволить наиболее просто и рационально решить основную техническую задачу, а именно исключить возникновение технических противоречий. Среди них отметим следующие: наряду с силой тяги обычно возникает проблема КПД, связанная в свою очередь с расходом и запасом топлива на борту летательного аппарата, ограничением грузоподъемности или дальности полета и пр. Исходя из системного подхода к проектированию и созданию конкурентно-способного объекта техники летательного аппарата, приоритетным является совершенство необходимых процессов преобразования энергии с максимальным КПД, который для воздушных винтов зависит от числа его лопастей (k). При увеличении числа лопастей от минимальных 2-3 КПД винта возрастает и достигает максимума при числе k=5-7, а при дальнейшем увеличении k КПД начинает снижаться.
Есть основание, прежде всего, найти число k, соответствующее максимальному КПД, а далее наращивать силу тяги воздушного винта путем увеличения числа тонкостенных несущих (рабочих) пластин полипланных поверхностей на базовых лопастях, не увеличивая таким путем проекцию винта на сметаемую площадь и не увеличивая существенно лобовое сопротивление воздушного винта и летательного аппарата, а также не увеличивая сопротивление воздуха вращению винта.
Таким образом, первые существенные признаки предмета изобретения причинно-следственно связаны с решением поставленной технической задачи способа.
Важнейшими существенными признаками являются признаки тонкостенных полипланных несущих поверхностей, обеспечивающих минимизацию их сопротивления и поглощаемой воздушным винтом энергии, т.е. снижение сопротивления воздушного винта и повышение его КПД. Последняя причинно-следственная связь особо отчетливо проявляется при сравнении данного способа со способом применения тандемных винтов. Этой же цели служит ограничение (недопущение) сверхзвуковых окружных скоростей на концах лопастей винта, выраженное приведенным выше численным условием, ограничивающим максимальное число оборотов винта в гиперболической зависимости от диаметра винта.
Для пояснения и подтверждения приведенных положений рассмотрим результаты проектных расчетов воздушного винта для тяжелого аэромобиля (масса G=3 т). Мощность двигателя по упомянутому выше патенту РФ №2169085 [5] Nмакс≤600 л.с. Ограничение диаметра (D) воздушного винта на этом летательном аппарате обусловлено тем, что он не должен превышать габаритной ширины аэромобиля, так как в противном случае аэромобиль не будет сертифицирован для дорожных условий эксплуатации по требованиям к безопасности дорожного движения. По указанной причине диаметр воздушного винта должен быть ограничен (D≤2 м).
Выполним оценку расчетной силы тяги винта (Тр) и его КПД (η) для заданной техническими требованиями крейсерской скорости v=200 км/ч и скорости вращения винта n=2000 об/мин для ряда значений числа базовых лопастей винта k=4-8.
Расчеты выполнены А.Н.Кишаловым.
Полученные данные дают основания выбрать расчетное число k=6 лопастям и силу тяги, равную для монопланного винта Тр=581,5 кг. Однако для поддержания крейсерского режима полета при указанном n задана по техническим требованиям сила тяги, равная Tт>Tp. Следовательно, невязка ΔТ=Тт-Тр≈Тр≈0,5 Тт.
Для получения заданного Тт необходима дополнительная площадь полипланных рабочих поверхностей, примерно равная площади базовых лопастей. Распределяя эту площадь на неполной длине монопланных лопастей, получаем рекомендации для дальнейших операций проектного расчета и по изготовлению опытных образцов полипланного устройства воздушного винта. Вместе с тем отметим, что существует резерв повышения силы тяги при увеличении числа оборотов воздушного винта вплоть до nmax, обеспечивающих получение соответствующей максимальной скорости. Сопоставляя условие непревышения окружными скоростями на концах лопастей винта скорости звука, можно убедиться, что оно выполнимо: nmax=6000·D-1=3000 об/мин.
Следовательно, проектируемый летательный аппарат имеет запас повышения скорости полета за счет увеличения числа оборотов воздушного винта сверх того, которое обеспечивает крейсерскую скорость полета. По приведенным данным можно убедиться также, что в случае необходимости допустимо пытаться получать более высокую тяговую силу и при более низких числах оборотов винта путем увеличения числа полипланных несущих поверхностей.
Следовательно, применение данного способа представляет также потенциальную возможность уменьшения эксплуатационных расходов топлива, когда заданное число оборотов винта, соответствующее крейсерской скорости nк, не совпадает в определенных пределах с числом оборотов силовой установки, соответствующим минимальным удельным расходам топлива.
Таким образом, данный способ расширяет пределы комплексного повышения эффективности системы «силовая установка - воздушный винт», или короче «двигатель - движитель», повышает тяговую силу Т и КПД, имеет промышленное значение и может быть представлен для патентной защиты промышленной собственности.
Конкретизируем причинно-следственные связи признаков и технических результатов способа.
Возможность повышения КПД обусловлена тем, что повышение силы тяги достигается использованием тонкостенных полипланных несущих поверхностей, обладающих значительно меньшим аэродинамическим сопротивлением, чем базовые лопасти воздушного винта. Поэтому повышение тяговой силы пропорционально увеличению числа полипланных рабочих поверхностей, тогда как воздушное сопротивление винта увеличивается в существенно меньшей пропорции. Это изменяет в желательном направлении баланс мощностей и КПД воздушного винта по следующему выражению:
η=1/[1+(1+ΔС)·Nв/((1+ΔТ)·Nт)],
где
Nт - мощность силы тяги монопланного винта;
Nв - мощность поглощаемая монопланным винтом;
ΔT - коэффициент увеличения силы тяги винта с полипланным устройством;
ΔC - коэффициент увеличения сопротивления винта с полипланным устройством;
ΔТ>ΔС.
При этом делается допущение, что известные компоненты обобщенного КПД монопланного винта сохраняют свои значения при оснащении винта полипланным устройством [7].
Разумеется, необходимо учитывать, что мощность, поглощаемая винтом, пропорциональна третьей степени числа оборотов винта, как было отмечено выше [3]. По этой физической причине вариации числа оборотов винта в значительной мере влияют на вариации поглощаемой винтом мощности. Так, в пределах изменения числа оборотов на 5-10% поглощаемая мощность изменяется на 16-33%. Использование этого явления позволяет получить дополнительные возможности повышения КПД и снижения удельных расходов топлива силовой установкой преимущественно для винта, работающего с постоянным числом оборотов, соответствующим, например, минимальному удельному расходу топлива
ge min.
Таким образом, представленный способ повышения силы тяги и КПД воздушного винта с учетом особенностей скоростных характеристик силовой установки и характеристик расходов топлива открывает дополнительные возможности повышения эффективности системы двигатель-движитель.
Для реализации представленного способа повышения силы тяги и КПД требуется устройство воздушного винта преимущественно с широкими базовыми лопастями и симметричным поперечным профилем лопастей. С целью снижения поглощаемой мощности и повышения эффективности полипланных несущих (рабочих) поверхностей они выполняются, например, в виде решетки с набором плоских взаимно перпендикулярных пластин и устанавливаются на ограниченной длине базовых лопастей, начиная с конца лопасти. Базовые лопасти выполняются с переменной толщиной, не превышающей от конца до конца (т.е. от комля до конца) 10% длины хорды лопасти, суммарная толщина дополнительных планов не превышает 1/3 толщины базовой лопасти, а толщина пластин планов и расстояние между ними должны относиться к хорде bпп, как указано выше, т.е. 
 a
a  причем передние и задние кромки дополнительных планов выполняются заостренными.
причем передние и задние кромки дополнительных планов выполняются заостренными.
При этом уровень техники повышается вследствие учета кругового движения полипланного устройства. Пластины, соединяющие полипланные несущие (рабочие) поверхности, выполнены цилиндрическими с радиусами цилиндрических поверхностей, равными расстояниям этих пластин от центра вращения винта, а образующие цилиндрических поверхностей наклонены от нормали к плоскости симметрии базовой лопасти на средний угол атаки базовых лопастей, устанавливаемый на крейсерском режиме полета, причем наклон образующих цилиндрических поверхностей выполняется в направлении вращения винта (навстречу повороту лопасти), в результате эти образующие оказываются параллельными оси вращения винта.
С целью обеспечения коротких пробегов при взлете и посадке летательного аппарата планы полипланного устройства устанавливаются с собственными углами атаки при нейтральном положении базовой лопасти.
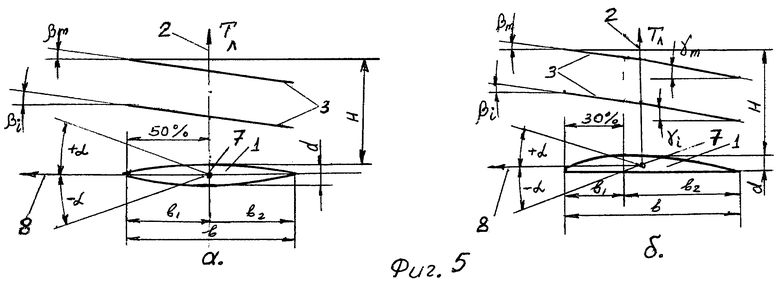
С целью повышения эффективности полипланного устройства на всех стадиях полета от старта до посадки планы выполняются профилированными вдоль базовой лопасти на расстоянии 30-50% хорды от передней кромки плана с отгибом пластины плана на угол γ, причем с возможностью увеличения угла отгиба в направлении к оси вращения винта в соответствии с зависимостью угла от длины плана lп и расстояния от конца базовой лопасти li по выражению:
tgγi=(l+li/ln)tgγo, где γo - начальный угол отгиба плана, образуемый с плоскостью асимметричного поперечного сечения базовой лопасти и определяемый у конца базовой лопасти (см. фиг.5 и 6).
С целью повышения жесткости планов в продольном и поперечном направлениях и снижения уровня шума преимущественно для несимметричного профиля базовой лопасти планы выполняются криволинейно-гофрированными, причем радиусы кривизны изменяются вдоль базовой лопасти и равны расстояниям вершины каждого отдельного гофра до центра вращения винта.
С целью обеспечения жесткости и прочности, уменьшения вибраций и уровня шума неразборное соединение планов между собой и базовой лопастью выполняется преимущественно высокотемпературной пайкой, причем с аморфизацией слоев припоя, например резким глубоким охлаждением.
Вместе с тем, с целью обеспечения ремонтопригодности и повышения приспособленности к различным условиям эксплуатации винт оснащается съемными с базовых лопастей сменными (модульными) полипланными устройствами, различающимися по степени увеличения силы тяги, например для равнинных и высокогорных условий. Данное обстоятельство является важным как для разработанного для патентования способа, так и устройства для его реализации.
Учитывая возможность использования данного способа и устройства в различных климатических и погодных условиях, с целью борьбы с обледенением винт оснащается противообледенительным устройством.
Описание устройства в статике.
На фиг.1, 2, 5 и 6 показана структура базовой лопасти воздушного винта с полипланным устройством, которое служит для повышения силы тяги и КПД. На фиг.1 обозначены следующие структурные элементы устройства: 1 - базовая лопасть с осью вращения 2, 3 - пластина плана, 4 - крышка обоймы планов, 5 - соединительные пластины планов.
Базовая лопасть на указанных фигурах воздушного винта представлена в нейтральном положении при отсутствии угла атаки (α=0). Установленное на базовой лопасти полистанное устройство содержит пластины планов с дополнительными рабочими поверхностями, которые увеличивают общую аэродинамическую несущую поверхность с базовой лопастью. Размещение полипланного устройства, начиная от конца базовой лопасти, повышает его эффективность как в статике, так и в динамике. В статике полипланное устройство снижает массу данного устройства в сравнении с монопланным устройством воздушного винта большего диаметра. Это преимущество особенно наглядно проявляется на винтокрылых машинах и, что очень важно, за счет укорочения лопастей повышается безопасность вертолетов в условиях эксплуатации в пересеченной местности при полетах на малой высоте, маневрировании и т.п.
Вместе с тем, полипланное устройство увеличивает продольную и поперечную жесткость базовой лопасти, что позволяет уменьшить ее толщину, а в динамике увеличивает силу тяги при минимизации общей массы полипланного устройства и базовой лопасти. Фактически полипланное устройство образует совместно с базовой лопастью строительную конструкцию типа фермы, что соответственно резко увеличивает собственные частоты колебаний лопасти, снижает амплитуды колебаний и внутренние напряжения в материалах конструкции. Тем самым повышается усталостная прочность воздушного винта.
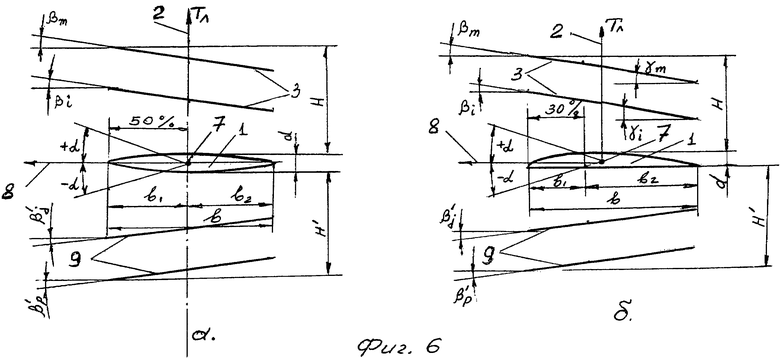
Увеличение эффективной площади полипланного устройства может осуществляться как с одной стороны (фиг.1 и 5), так и с обеих сторон (фиг.6) базовой лопасти воздушного винта, начиная с конца и заканчивая на длине 0,5-0,7 длины базовой лопасти для уменьшения концентрации напряжений от действия двухсторонних однонаправленных нагрузок.
Симметричный профиль относительно хорды лопастей (фиг.5а и 6а) предпочтительней, чем асимметричный (фиг.5,б и 6,б).
Технология изготовления решетчатых крыльев по данным [1] представляет неразборные конструкции полипланных устройств, учитывая их одноразовое употребление в большинстве случаев (например, в ракетостроении). Для летательного аппарата многоразового использования характерно, наоборот, длительное многоразовое использование, которое обусловливает интерес к разборным конструкциям, например, должна учитываться не только ремонтопригодность, но и возможность использования различных по мощности полипланных устройств, учитывающих различные эксплуатационные условия и требования к полипланным воздушным винтам. Так, например, для равнинных и высокогорных условий полипланные устройства могут различаться числом и размерами планов, чтобы обеспечивать наибольшую эффективность летательного аппарата, требования экономии топлива и т.п.
Следовательно, на едином базовом воздушном винте могут быть использованы разные полипланные модули, выполняемые съемными и сменяемыми.
Таким образом, в разработках и НИОКР должны быть представлены разные конструкции полипланных воздушных винтов. Это обстоятельство должно найти отражение и в патентной защите данного способа и устройства для его осуществления.
Применение решетчатых крыльев для кругового движения лопастей воздушного винта усложняет задачу обеспечения минимального сопротивления воздуха полипланной конструкции. Дело в том, что при прямолинейном движении пластины планов могут быть плоскими и взаимно перпендикулярными. Для воздушного винта соединительные пластины, установленные перпендикулярно к лопасти винта, плоскими быть не могут, т.к. они в этом случае будут увеличивать воздушное сопротивление вращению винта (т.е. будут «загребать» воздух, сообщать ему движение вдоль лопасти, усиливая турбулизацию в зоне полипланных несущих поверхностей).
Для исключения этого неблагоприятного явления пластины, соединяющие полипланные поверхности, должны выполняться профилированными, а именно
цилиндрическими, с радиусами кривизны R1, R2,…Rn, равными расстояниям этих пластин от центра вращения винта (фиг.2). При таком выполнении пластин, соединяющих планы, они будут оказывать минимальное сопротивление вращению воздушного винта.
Кроме того, эти же пластины должны учитывать поворот базовых лопастей винта на угол атаки для создания силы тяги (подъема). Решение этой задачи следует искать для винтов с переменными углами атаки лопастей с учетом продолжительности работы воздушного винта с тем или иным углом атаки. В большинстве случаев наиболее правильным будет ориентировка на угол атаки, соответствующий крейсерскому режиму полета летательного аппарата. Учет угла атаки базовой лопасти в формообразовании соединительных пластин должен обеспечивать параллельность образующей цилиндрической поверхности оси вращения воздушного винта. Тогда будет обеспечена минимизация воздушного сопротивления этих пластин при круговом движении (в пределах сметаемого воздушным винтом круга).
Таким образом, в конечном итоге соединительные пластины полипланного устройства будут представлять косой срез цилиндрической поверхности, т.е. фактически отрезок эллиптической поверхности. Это обстоятельство необходимо учитывать, начиная с изготовления самых первых опытных образцов воздушного винта по данному способу. По сути, данные уточнения относятся к «ноу-хау» способа повышения силы тяги и КПД воздушного винта, а также устройства для его осуществления.
Наряду со спецификой формообразования соединительных пластин необходимо учитывать условия повышения эффективности несущих поверхностей планов во взаимодействии с базовыми лопастями.
Эти условия сопряжены с тремя ограничениями: первое - расстояние от базовой лопасти до следующей несущей поверхности плана зависит главным образом от толщины пластин плана, их отношение должно составлять порядка 1:10 (оптимум); второе - угол атаки плана βi должен быть больше угла атаки базовой лопасти α на несколько градусов (1°-5°), фиг.5 и 6; третье - то же самое может относиться к углам атаки следующих планов, т.е. βi-βi-1=1°-5°.
Последнее ограничение может быть также связано с учетом разницы окружных скоростей на конце лопасти воздушного винта и в средней части лопасти, в зоне которой рекомендуется заканчивать полипланное устройство, где упомянутое соотношение 1:10 снижается до 1:8.
Теория и практика использования полипланных устройств решетчатых крыльев показывает [1], что чем тоньше планы, тем меньше требуется расстояние между ними, чтобы получить необходимую подъемную силу (или управляющую). Ограничением является прочность и жесткость планов, а также технологические проблемы надежности соединений, выполненных паяльным способом. При этом побочным негативным эффектом является расширение спектра звуковых явлений при уменьшении жесткости тонких планов.
Использование вместо плоских пластин планов гофрированных пластин с впадинами и выступами, соизмеримыми с толщиной планов, целесообразно, т.к. это резко увеличивает жесткость планов. Это можно оценить методами теории упругости, определяя так называемую цилиндрическую жесткость гофрированных пластин.
От применения гофров можно ожидать также и положительного аэродинамического эффекта: ламинаризации прилегающих слоев потока воздуха вдоль гофра, задержки отрыва потока от поверхности плана при нестационарности потока и увеличении его скорости.
Отмеченные признаки и особенности гофрированных пластин позволяют несколько увеличить углы атаки планов.
Следовательно, учет разнородных явлений, связанных с работой полипланного устройства, позволяет совершенствовать и повышать эффективность устройства воздушного винта, т.е движителя летательного аппарата.
Таким образом, данный способ повышения силы тяги и КПД осуществим представленным устройством воздушного винта для разнообразных условий эксплуатации самолетов, вертолетов, аэромобилей и др. объектов авиационной техники.
Работа устройства полипланного воздушного винта рассматривается при автоматическом регулировании числа оборотов, обеспечивающим наиболее экономичное использование всей мощности двигателя при различных режимах полета. Вместе с тем рассматриваются условия работы полипланного воздушного винта с позиций удовлетворения требований короткого взлета и посадки, минимизации моментов инерции и гироскопических моментов при управлении вектором тяги винта [2, 5].
Известно, что винты с автоматическим регулированием оптимизируют условия взлета и набора высоты, повышают предел достижимой скорости. Это поясняется в системе «двигатель-движитель» на фиг.4. Кроме того, необходимо принимать во внимание, что воздушные винты с автоматическим регулированием повышают управляемость транспортного средства, преобразуемого в летательный аппарат [5], при движении в дорожных и внедорожных условиях, на крутых подъемах, особенно при использовании управления вектором тяги.
Однако, учитывая приоритетные требования высокой топливной экономичности и повышения КПД, в основном работа полипланного устройства винта рассматривается при постоянных оборотах в области А (фиг.4), соответствующей наибольшим КПД и экономии топлива при крейсерском режиме полета. Данное положение сохраняет свою силу и при постановке и решении задачи короткого взлета и посадки летательного аппарата. Вместе с тем, при решении задачи короткого взлета работа воздушного винта с полипланным устройством может рассматриваться в зоне более высоких чисел оборотов, ограниченной внешней характеристикой двигателя и зоной В (фиг.4) поглощаемой мощности винта, т.е. при (Ne-Nв)≥Nт.
При постановке задачи обеспечения короткого взлета и посадки (при взаимодействии с колесными тормозами шасси) пробег до остановки летательного аппарата может быть сокращен почти вдвое. При этом сила торможения, развиваемая винтом, может превышать силу тяги. Соответственно возрастает и поглощаемая винтом мощность. Комплексное совершенствование тяговых и толкающих характеристик воздушного винта с полипланным устройством легче достигается при двухстороннем размещении полипланного устройства, т.е. с обеих сторон базовой лопасти (фиг.6). В тех случаях, когда необходима компенсация гироскопических моментов воздушного винта при управлении, например, вектором тяги [5], целесообразно использование двух противоположно вращающихся винтев, что ограничивает условия размещения полипланных устройств. Для преодоления этого технического противоречия могут быть использованы профилированные пластины планов, что схематично отражают фиг.5,б и 6,б.
Таким образом, полипланное устройство наряду с повышением тяговых характеристик воздушного винта ограниченного диаметра расширяет возможности совершенствования и других важных функциональных и эксплуатационных свойств летательного аппарата. При этом работа полипланного устройства сопряжена с меньшим сопротивлением вращению винта, т.е. обусловливает меньшую поглощаемую мощность винта, что повышает его КПД.
Рассмотрим подробнее работу базовой лопасти с двухсторонним и симметричным расположением полипланного устройства (верхнего и нижнего, фиг.6а). В этом случае при α=0 и вращении винта при углах атаки верхних βi и нижних βj планов возникают практически уравновешенные разнонаправленные силы Тi и Tj. При увеличении подачи топлива в двигатель и росте числа оборотов автоматическое регулирование обеспечивает поворот базовой лопасти на угол α и вместе с этим выводит все полипланное устройство на положительные углы атаки и, соответственно, на однонаправленные силы Т. Суммарная сила тяги базовой лопасти и планов быстро нарастает, в результате взлет ускоряется и укорачивается. При приземлении все происходит в обратном порядке. После прохождения нейтрального положения (α=0) базовой лопасти и планов полипланного устройства возникают отрицательные углы атаки и отрицательно направленные силы Т, т.е. тормозные силы. Тем самым процесс торможения интенсифицируется, и путь остановки укорачивается в два-три раза по сравнению с торможением только колесными тормозами.
Сложность течения воздуха в полипланном устройстве имеет своими следствиями, по меньшей мере, три эффекта: 1 - возможность повышения силы тяги воздушного винта и его КПД; 2 - возможность создания тормозной силы воздушным винтом при изменении направления его вращения при неизменном угле атаки базовой лопасти, или при неизменном направлении вращения, но с изменением угла атаки базовой лопасти с положительного на отрицательное, и 3 - возможность обледенения воздушного винта и полипланного устройства вследствие эффекта Джоуля-Томпсона.
Если первые два эффекта должны быть отнесены к положительным результатам данного способа и устройства, то третье явление требует мер по борьбе с обледенением, главным образом, при повышенной влажности воздуха и относительно низких температурах, например в горных и высотных условиях эксплуатации летательного аппарата. Последнее требует, однако, экспериментальной проверки, т.к. неизбежные вибрации элементов конструкции полипланного устройства могут оказывать разрушительное действие на ледяное покрытие (корку) на тонколистовых планах. Увеличение силы тяги и КПД, а также возможности укорочения в несколько раз пробегов при взлете и посадке летательного аппарата на основе данного способа и устройства следует отнести к более высокому уровню авиационной техники и необходимости защиты промышленной собственности.
ЛИТЕРАТУРА
1. Белоцерковский С.М., Фролов В.П. и др. Решетчатые крылья. - М.: Машиностроение, 1985. 320 с.
2. Морозов О.А., Белоцерковский С.М., Фролов В.П. и др. Весло. Авт. свид. №1512859 СССР, МКИ В63Н 16/04,1987, Б.И. №37, 1989.
3. Гошек И. Аэродинамика больших скоростей. - М.: Изд-во иностр. лит., 1954. 547 с.
4. Петраков В.М., Фролов В.П., Ципенко В.Г. Полифюзеляжный самолет. Авт. свид. №2111896 РФ, МКИ В64С 35/00.
5. Луканин В.Н., Дербаремдикер А.Д. Патент РФ №2169085, МПК B60F 5/02, 1999, Б.И. №17, 2001.
6. Белоцерковский С.М., Камнев П.И. и др. Решетчатые крылья в ракетостроении, космонавтике, авиации. / Под ред. Белоцерковского С.М., Фролова В.П., Подобедова В.А., Плаунова В.П. - М.: Новый Центр, 2007. 407 с.
7. Курочкин Ф.П. Проектирование и конструирование самолетов с вертикальным взлетом и посадкой. - М.: Машиностроение, 1977. 223 с.
Перечень чертежей
Фиг.1. Конструктивная схема лопасти воздушного винта с полипланным устройством на конце лопасти: 1 - базовая лопасть винта; 2 - ось вращения воздушного винта и направление действия силы тяги Т; 3 - пластина плана; 4 - крышка обоймы планов; 5 - соединительные пластины планов; D - диаметр воздушного винта; 1 и Н - соответственно длина и высота полипланного устройства.
Фиг.2. Вид на базовую лопасть с полипланным устройством по оси вращения винта: 6 - гофрированная поверхность крышки обоймы планов и радиусы кривизны R1 и R5 торцовых стенок обоймы планов и соединяющих стоек планов R2, R3, R4; b - ширина лопасти (хорда). Обозначения 1-5 приведены на фиг.1.
Фиг.3. Типы полипланных устройств: а - рамное; б - сотовое; в - комбинированное.
Фиг.4. Пример внешней скоростной характеристики мощности поршневого двигателя внутреннего сгорания летательного аппарата с характеристикой удельных расходов топлива и схема согласования оптимальных режимов работы системы двигатель-движитель и минимизации расходов топлива при повышенном КПД воздушного винта: Ne - мощность двигателя в зависимости от скорости вращения коленчатого вала (n); ge - характеристика удельных расходов топлива;
А - зона экономичной работы воздушного винта на крейсерском режиме полета летательного аппарата; В - область характеристик поглощаемой воздушным винтом мощности в зависимости от скорости вращения коленчатого вала двигателя.
Фиг.5. Конструктивные схемы односторонней установки полипланного устройства на лопастях: а - лопасти с симметричным поперечным сечением и б - с несимметричным поперечным сечением: 1 - базовая лопасть; 7 - центр оси поворота базовой лопасти на угол атаки лопасти: +α при взлете и полете и -α при посадке и торможении после касания опорной поверхности при неизменном направлении вращения; 3 - планы полипланного устройства, обращенные в сторону полета (подъема) и установленные под собственными углами атаки βi и βm к горизонтали; 8 - направление вращения винта (см. фиг.1); Тл - сила тяги отдельной лопасти винта. Обозначения 1-3 приведены на фиг.1.
Фиг.6. Конструктивные схемы двухсторонней установки полипланного устройства на базовых лопастях воздушного винта: а и б - соответственно с симметричным и несимметричным поперечным сечением лопастей; 1-7 то же, что на фиг.1 и 5; 9 - планы полипланного устройства, установленные с противоположной стороны лопасти под углами  и
и 
Изобретение относится к транспортному машиностроению и касается воздушного движителя, выполненного в виде воздушного винта при ограничениях его диаметра, и способа повышения силы тяги и КПД воздушного винта. Способ заключается в том, что выбирают расчетным методом оптимальное число монопланных базовых лопастей винта, обеспечивающих максимальный коэффициент полезного действия (КПД) и соответствующую этому КПД тяговую силу. Определяют разницу между потребной и расчетной силами тяги. Компенсируют полученную разницу тонкостенными полипланными рабочими поверхностями, присоединяемыми к базовым лопастям преимущественно на стороне, обращенной в направлении полета (подъема) при условии непревышения скорости звука окружными скоростями концов базовых лопастей винта и полипланных рабочих поверхностей: D·nmax≤6000, где D - ограниченный (заданный) диаметр сметаемой площади, м; а nmax - максимальная скорость вращения воздушного винта, об/мин. Воздушный винт для реализации способа содержит широкие базовые лопасти и симметричные поперечные профили лопастей. Полипланные рабочие поверхности выполнены, например, в виде решетки с набором плоских взаимно перпендикулярных пластин и установлены на базовых лопастях, начиная с конца лопасти. Достигается увеличение силы тяги и повышение КПД воздушного винта. 2 н. и 10 з.п. ф-лы, 1 табл., 6 ил.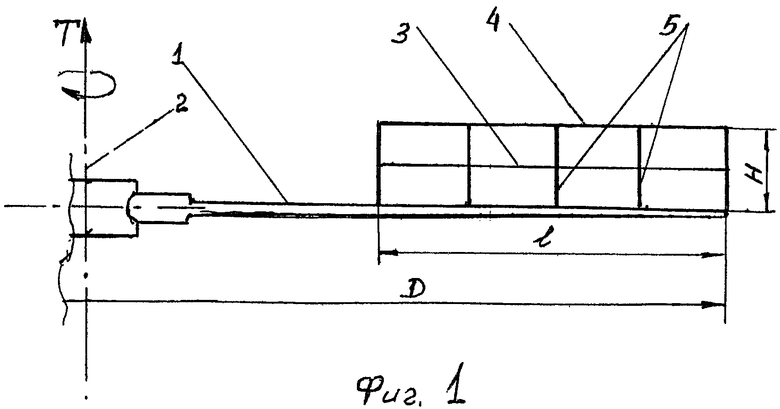
1. Способ повышения силы тяги и КПД многолопастного воздушного винта с ограниченным заданным диаметром сметаемой площади винта, заключающийся в том, что выбирают расчетным методом оптимальное число монопланных базовых лопастей винта, обеспечивающих максимальный КПД и соответствующую этому КПД тяговую силу при заданной дозвуковой, например крейсерской скорости полета летательного аппарата, определяют разницу между потребной и расчетной силами тяги, компенсируют полученную разницу тонкостенными полипланными несущими (рабочими) поверхностями, присоединяемыми к базовым лопастям преимущественно на стороне, обращенной в направлении полета (подъема) при условии непревышения скорости звука окружными скоростями концов базовых лопастей винта и полипланных несущих поверхностей: D·nmax≤6000;
где D - ограниченный (заданный) диаметр сметаемой площади, м,
а nmax - максимальная скорость вращения воздушного винта, об/мин.
2. Способ по п.1, отличающийся тем, что скорость вращения винта, обеспечивающая крейсерский режим движения летательного аппарата, выбирается соответствующей числу оборотов силовой установки при минимальном удельном расходе топлива с допустимым отклонением на уровне минус 5-10%.
3. Способ по п.1, отличающийся тем, что скорость вращения винта, соответствующая крейсерскому режиму движения летательного аппарата, выбирается меньше числа оборотов силовой установки при минимальном удельном расходе топлива с условием, что соответствующий удельный расход топлива силовой установки не будет превышать минимальный удельный расход топлива больше, чем на 5-10%.
4. Способ по п.1, отличающийся тем, что скорость вращения винта, соответствующая режиму движения с максимальной скоростью, выбирается больше числа оборотов силовой установки при минимальном удельном расходе топлива с условием, что соответствующий удельный расход топлива силовой установки не будет превышать минимальный удельный расход топлива больше, чем на 5-10%.
5. Воздушный винт для реализации способа по любому из пп.1-4, преимущественно с широкими базовыми лопастями и симметричным поперечным профилем лопастей, отличающийся тем, что полипланные несущие (рабочие) поверхности выполняются, например, в виде решетки с набором плоских взаимно перпендикулярных пластин и устанавливаются на ограниченной длине базовых лопастей, начиная с конца лопасти, при этом базовые лопасти выполняются с переменной толщиной, не превышающей от конца до комля 10% длины хорды лопасти, суммарная толщина дополнительных планов не превышает 1/3 толщины базовой лопасти, а толщина пластин планов и расстояния между ними должны относиться как: 1:(90±10), причем передние и задние кромки дополнительных планов выполняются заостренными.
6. Воздушный винт по п.5, отличающийся тем, что пластины, соединяющие полипланные несущие (рабочие) поверхности, выполнены с радиусами цилиндрических поверхностей, равными расстояниям этих пластин от центра вращения винта, а образующие цилиндрических поверхностей наклонены от нормали к плоскости симметрии базовой лопасти на средний угол атаки базовых лопастей, устанавливаемый на крейсерском режиме полета, причем наклон образующих цилиндрических поверхностей выполняется в направлении вращения винта (навстречу повороту лопасти), в результате эти образующие оказываются параллельными оси вращения винта.
7. Воздушный винт по п.5, отличающийся тем, что планы полипланного устройства устанавливаются с собственными углами атаки при нейтральном положении базовой лопасти.
8. Воздушный винт по п.7, отличающийся тем, что планы выполняются профилированными вдоль базовой лопасти на расстоянии 30-50% хорды от передней кромки плана с отгибом пластины плана на угол γ, причем с возможностью увеличения угла отгиба в направлении к оси вращения винта в соответствии с зависимостью угла от длины ln плана и расстояния li от конца базовой лопасти по выражению: tgγi=(l+li/ln)·tgγo, где γо - начальный угол отгиба плана, образуемый с плоскостью асимметричного поперечного сечения базовой лопасти и определяемый у конца базовой лопасти.
9. Воздушный винт по п.8, отличающийся тем, что планы выполняются криволинейно гофрированными, причем радиусы кривизны изменяются вдоль базовой лопасти и равны расстояниям вершины каждого отдельного гофра до центра вращения винта.
10. Воздушный винт по любому из пп.5-9, отличающийся тем, что неразборное соединение планов между собой и базовой лопастью выполняется преимущественно пайкой, причем с аморфизацией слоев припоя, например, резким глубоким охлаждением.
11. Воздушный винт любому из пп.5-9, отличающийся тем, что он оснащается съемными с базовых лопастей, сменными (модульными) полипланными устройствами, различающимися по степени увеличения силы тяги, например, для равнинных и высокогорных условий.
12. Воздушный винт по любому из пп.5-9, отличающийся тем, что он оснащается противообледенительным устройством, например, электрическими нагревательными проводниками.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |
| DE 4444256 A1, 20.06.1996 | |||
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА С ГИБКИМИ УБИРАЕМЫМИ ЛОПАСТЯМИ | 1991 |
|
RU2005655C1 |
| Способ выделки обувных,галантерейных и подкладочных кож хромового дубления из шкур тюленя и нерпы | 1948 |
|
SU76882A1 |

