Предлагаемое изобретение относится к электротехнике и предназначено для использования при испытаниях электрических машин постоянного тока.
Известны стенды для испытания электрических машин постоянного тока методом взаимного нагружения, при которых якорные обмотки двигателей соединяются параллельно и подключаются к регулируемому источнику постоянного напряжения, а обмотки возбуждения двигателя и генератора подключаются к регулируемым источникам постоянного тока (Родькин Д.И. Системы динамического нагружения и диагностики электродвигателей при послеремонтных испытаниях. - М., Недра, 1992, с. 37-39, рис. 33; Коварский Е.М., Янко Ю.И. Испытание электрических машин. - М., Энергоатомиздат, 1990, с. 74-76, рис. 3.1-рис. 3.4; Афанасов A.M. Теоретический анализ энергетических процессов при взаимной нагрузке тяговых электрических машин постоянного тока / Вicник Дн. нац. ун-ту залiзн. трансп. iм акад. В. Лазаряна: 36. наук. пр. 2009, вып. 25, с. 258-262, рис. 1).
В известных стендах для испытания электрических машин постоянного тока используются две близкие или одинаковые по мощности электрические машины, одна из которых работает двигателем, другая - генератором. Точки отбора энергии при этом совпадают, а из сети потребляется мощность, равная потерям в электрических машинах. Режим нагружения определяется соотношением токов возбуждения двигателя и генератора. Известно, что механический момент, развиваемый двигателем, зависит от токов якорной обмотки и возбуждения, а угловая скорость зависит от напряжения на якорной обмотке и момента механической нагрузки. Однако, в известных стендах механический момент и угловая скорость не стабилизируются и не регулируются. Поэтому известные способы имеют низкую точность поддержания механической нагрузки и угловой скорости при длительных испытаниях и ограниченные функциональные возможности, т.к. не позволяют регулировать, стабилизировать или изменять по программе механический момент нагрузки и угловую скорость электрических машин.
Следовательно, недостатками известных способов испытания электрических машин постоянного тока являются низкая точность поддержания механической нагрузки и угловой скорости в процессе длительных испытаний и ограниченные функциональные возможности, т.к. они не позволяют регулировать, стабилизировать или изменять по программе механический момент нагрузки и угловую скорость электрических машин.
Из известных технических решений, наиболее близким по достигаемому результату к предполагаемому изобретению является стенд для испытания электрических машин постоянного тока, содержащий две электрические машины, одна из которых выполняет функцию двигателя, а вторая выполняет функцию генератора, валы электрических машин жестко соединены с помощью муфты, а обмотки возбуждения подключены к выходам соответственно первого и второго тиристорных управляемых выпрямителей, два датчика тока, первый из которых включен последовательно с обмоткой возбуждения двигателя, а второй соединен последовательно с якорной обмоткой двигателя, выходы датчиков тока подключены к первому и второму входам контроллера, третий вход которого подключен к выходу задатчика режима испытаний, а выход подключен к управляющему входу второго тиристорного управляемого выпрямителя, задатчик тока возбуждения двигателя, подключенный выходом к управляющему входу первого тиристорного управляемого выпрямителя, третий управляемый выпрямитель, вход которого объединен с входами первого и второго тиристорных управляемых выпрямителей и подключен к питающей сети, а выход соединен с параллельно включенными якорными обмотками двигателя и генератора (Патент РФ №2480778, МПК G01R 31/34. Способ испытания электрических машин постоянного тока / С.И. Малафеев. - Опубл. 27.04.2013, Бюл. №12).
В известном стенде для испытания электрических машин постоянного тока используются две близкие или одинаковые по мощности электрические машины постоянного тока, одна из которых работает двигателем, другая - генератором. Точки отбора энергии при этом совпадают, а из сети потребляется мощность, равная потерям в электрических машинах. Режим нагружения определяется соотношением токов возбуждения двигателя и генератора. Известно, что механический момент, развиваемый двигателем, зависит от токов якорной обмотки и возбуждения. Стенд позволяет регулировать, стабилизировать или изменять по программе механический момент нагрузки машин. Задание и регулирование механического момента осуществляется с помощью обратной связи по моменту, который вычисляется по измеренным значениям токов якорной обмотки и обмотки возбуждения и известной конструктивной постоянной двигателя. В стенде предусмотрено косвенное измерение механического момента и его автоматическое регулирование с помощью обратной связи и контроллера, изменяющего ток возбуждения генератора в зависимости от сигнала задания и механического момента.
Однако в известном стенде для испытания электрических машин постоянного тока угловая скорость не контролируется и не регулируется. Поэтому известный способ имеет низкую точность поддержания угловой скорости в процессе длительных испытаний и ограниченные функциональные возможности, т.к. не позволяет регулировать, стабилизировать или изменять по программе угловую скорость электрических машин.
Следовательно, недостатками известного способа испытания электрических машин постоянного тока являются низкая точность поддержания угловой скорости в процессе длительных испытаний и ограниченные функциональные возможности, т.к. он не позволяет регулировать, стабилизировать или изменять по программе угловую скорость электрических машин.
Целью предполагаемого изобретения является повышение точности поддержания угловой скорости в процессе длительных испытаний и расширение функциональных возможностей способа испытания электрических машин постоянного тока путем регулирования, стабилизации или изменения по программе угловой скорости электрических машин.
Поставленная цель достигается тем, что в известный стенд для испытания электрических машин постоянного тока, содержащий две электрические машины, одна из которых выполняет функцию двигателя, а вторая выполняет функцию генератора, валы электрических машин жестко соединены с помощью муфты, а обмотки возбуждения подключены к выходам соответственно первого и второго тиристорных управляемых выпрямителей, два датчика тока, первый из которых включен последовательно с обмоткой возбуждения двигателя, а второй соединен последовательно с якорной обмоткой двигателя, выходы первого и второго датчиков тока подключены к первому и второму входам контроллера, третий вход которого подключен к выходу задатчика режима испытаний, а выход подключен к управляющему входу второго тиристорного управляемого выпрямителя, задатчик тока возбуждения двигателя, подключенный выходом к управляющему входу первого тиристорного управляемого выпрямителя, третий тиристорный управляемый выпрямитель, вход которого объединен с входами первого и второго тиристорных управляемых выпрямителей и подключен к питающей сети, а выход соединен с параллельно включенными якорными обмотками двигателя и генератора, дополнительно введены датчик напряжения, третий датчик тока, шина данных и второй контроллер, входы которого соединены с выходами третьего датчика тока, датчика напряжения и задатчика режима испытаний, а выход подключен к управляющему входу третьего управляемого выпрямителя, датчик напряжения и третий датчик тока подключены к выходу третьего управляемого выпрямителя, первый и второй контроллеры соединены шиной данных.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые элементы:
- датчик напряжения;
- третий датчик тока;
- второй контроллер;
- шина данных.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предполагаемого изобретения обеспечивается повышение точности поддержания угловой скорости в процессе длительных испытаний и расширение функциональных возможностей при испытаниях машин постоянного тока методом взаимного нагружения, а именно, обеспечиваются стабилизация, регулирование или программное изменение взаимной нагрузки электрических машин во всем диапазоне изменения нагрузок и угловых скоростей. Повышение точности и расширение функциональных возможностей достигается тем, что испытание предусматривает измерение угловой скорости и механического момента и их автоматическое регулирование с помощью обратных связей и контроллеров, изменяющих ток возбуждения генератора и напряжение на якорных обмотках электрических машин.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Известны датчики напряжения на якорной обмотке испытуемого двигателя постоянного тока (Патент RU 2 281 525, МПК G01R 31/34. Устройство для испытания машины постоянного тока / П.Л. Шлыченко и др. - 10.08.2006. Бюл. №22). В известном устройстве датчик напряжения используется для измерения только напряжения на якорной обмотке испытуемого двигателя. В предлагаемом техническом решении датчик напряжения подключен к параллельно соединенным якорным обмоткам двигателя и генератора.
Третий датчик тока, включенный последовательно с параллельно соединенными якорными обмотками двух электрических машин постоянного тока, в устройствах известного назначения не обнаружен.
Второй контроллер, входы которого подключены к задатчику режима испытаний, первому, второму и третьему датчикам тока и датчику напряжения, в устройствах аналогичного назначения не обнаружен.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
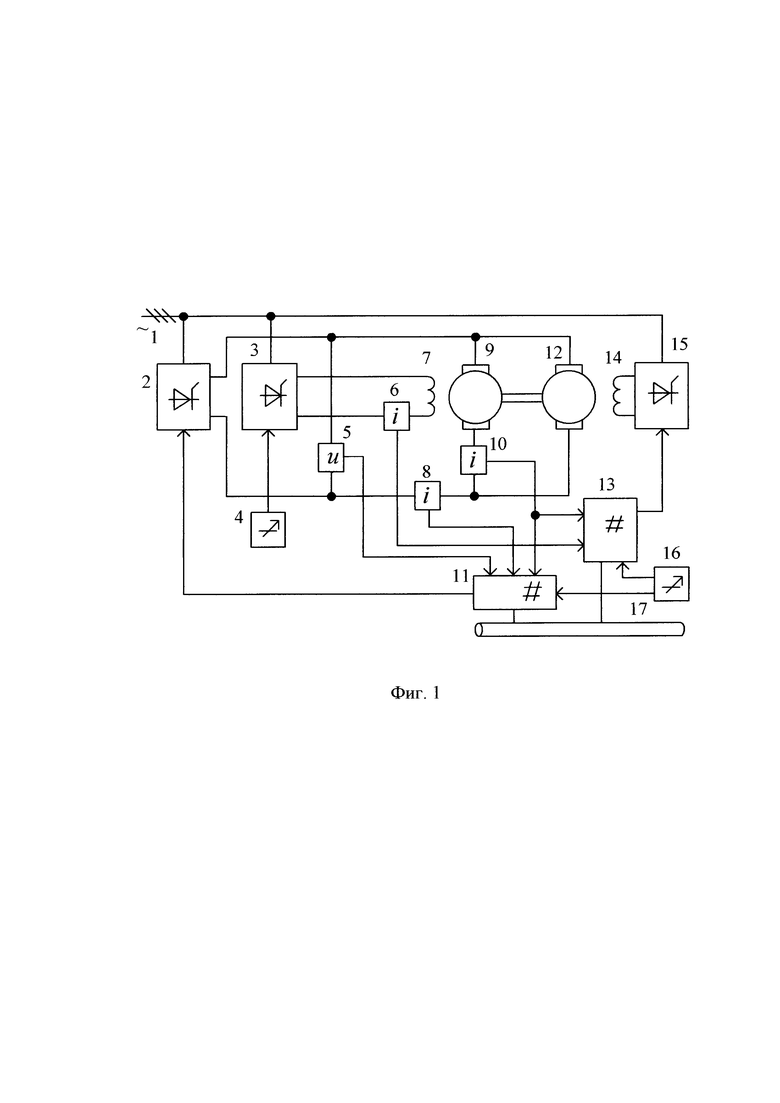
Сущность предлагаемого изобретения поясняется чертежами. На фиг. 1 показана функциональная схема стенда для испытания электрических машин постоянного тока. На чертеже обозначено: 1 - питающая сеть; 2, 3 и 15 - соответственно третий, первый и второй управляемые выпрямители; 4 - задатчик тока возбуждения двигателя; 5 - датчик напряжения; 6, 10 и 8 - соответственно первый, второй и третий датчики тока; 7 - обмотка возбуждения двигателя; 9 - якорная обмотка двигателя; 11 и 13 - соответственно второй и первый контроллеры; 12 - якорная обмотка генератора; 14 - обмотка возбуждения генератора; 16 - задатчик режима испытаний; 17 - шина данных.
В стенде для испытания электрических машин постоянного тока валы двух электрических машин 9 и 12, одна из которых выполняет функцию двигателя, а вторая выполняет функцию генератора, жестко соединены, а обмотки возбуждения 7 и 14 подключены к выходам соответственно первого 3 и второго 15 тиристорных управляемых выпрямителей, входы первого 3, второго 2 и третьего 1 управляемых выпрямителей объединены и подключены к питающей сети 1; выход третьего управляемого выпрямителя соединен через третий датчик тока 8 с параллельно включенными якорными обмотками двигателя 9 и генератора 12; первый датчик тока 6 включен последовательно с обмоткой возбуждения 7 двигателя, а второй датчик тока 10 соединен последовательно с якорной обмоткой 9 двигателя; датчик напряжения 5 подключен к выходу третьего управляемого выпрямителя 2, выходы первого 6 и второго 10 датчиков тока подключены к входам первого контроллера 13, выходы второго 10 и третьего 8 датчиков тока и датчика напряжения 5 подключены к входам первого контроллера 13, задатчик 4 тока возбуждения двигателя, подключен выходом к управляющему входу первого тиристорного управляемого выпрямителя 3, первый и второй выходы задатчика режима испытаний 16 подключены к входам соответственно первого 13 и второго 11 соединенных шиной данных 17 контроллеров, выходы которых соединены с управляющими входами соответственно второго 15 и третьего 3 управляемых выпрямителей.
Стенд для испытания электрических машин постоянного тока работает следующим образом. Третий управляемый выпрямитель 2 формирует на выходе постоянное напряжение, которое обеспечивает электропитание параллельно соединенных якорных обмоток двигателя 9 и генератора 12. Величина этого напряжения устанавливается выходным сигналом второго контроллера 11. Обмотка возбуждения 7 двигателя постоянного тока подключена к выходу первого тиристорного управляемого выпрямителя 3. Ток в обмотке возбуждения 7 двигателя стабилизируется с помощью первого тиристорного управляемого выпрямителя 3. Для измерения тока возбуждения двигателя используется первый датчик тока 6, включенный последовательно с обмоткой возбуждения 7. Задание значения тока в обмотке возбуждения 7 осуществляется с помощью задатчика 4. Ток в якорной обмотке двигателя 9 измеряется с помощью второго датчика тока 10. Сигналы с выходов первого 6 и второго 10 датчиков тока поступают на входы первого контроллера 13. Сигналы с выходов датчика напряжения 5, второго 10 и третьего 8 датчиков тока поступают на входы второго контроллера 11. Сигнал с первого выхода задатчика режима испытаний 16 действует на входе первого контроллера 13 и устанавливает заданное значение механического момента нагрузки для двигателя. Сигнал с второго выхода задатчика режима испытаний 16 действует на входе второго контроллера 11 и устанавливает заданное значение угловой скорости для двигателя. Ток в обмотке возбуждения 14 генератора регулируется вторым тиристорным управляемым выпрямителем 15. Первый 13 и второй 11 контроллеры соединены шиной данных 17.
Первый контроллер 13 выполняет следующие процедуры:
- вычисление потока возбуждения двигателя Фвд(iвд) в зависимости от тока возбуждения iвд (сигнал с выхода первого датчика тока 6); зависимость Фвд(iвд) рассчитывается в соответствии с кривой намагничивания электротехнической стали (см., например, Данку А., Фаркаш А., Надь Л. Электрические машины. - М., Энергоатомиздат, 1984, с. 250); значение Фвд(iвд) передается из первого контроллера 13 во второй контроллер 11 по шине данных 17.
- вычисление электромагнитного момента двигателя по формуле М=kФвд(iвд)i, где i - ток якорной обмотки 7 двигателя (сигнал второго датчика тока 10);
- вычисление рассогласования εМ=М0-М, где М0 - заданное значение момента (сигнал с первого выхода задатчика режима испытаний 16);
- преобразование сигнала рассогласования εМ=М0-М в соответствии с типовым законом регулирования, например, пропорционально-интегральным, в сигнал управления для второго тиристорного управляемого выпрямителя 15.
Выходной сигнал первого контроллера 13 действует на входе второго тиристорного управляемого выпрямителя 15, который поддерживает ток в обмотке возбуждения 14 генератора таким образом, что обеспечивается режим работы системы, при котором рассогласование минимально (εМ≈0). Заданное значение момента М0 при этом может поддерживаться постоянным или изменяться по программе. Таким образом, в системе управления за счет обратной связи по моменту обеспечивается поддержание во всех режимах заданного значения механической нагрузки.
Второй контроллер 11 выполняет следующие процедуры:
- вычисление угловой скорости двигателя в зависимости от напряжения и на якорной обмотке 9 и тока i якорной обмотки по формуле
где r - активное сопротивление якорной обмотки 9 двигателя; k - конструктивная постоянная двигателя;
- вычисление рассогласования εΩ=Ω0-Ω, где Ω0 - заданное значение угловой скорости (сигнал с второго выхода задатчика режима испытаний 16);
- преобразование сигнала рассогласования εΩ=Ω0-Ω в соответствии с типовым законом регулирования, например, пропорционально-интегральным, в сигнал управления uΩ
- вычисление разности между сформированным сигналом управления uΩи током iв третьего тиристорного управляемого выпрямителя 2 (сигнал третьего датчика тока 8) εi=uΩ-kвiв, где kв - коэффициент пропорциональности;
- преобразование сигнала рассогласования εi=uΩ-kвiв в соответствии с типовым законом регулирования, например, пропорционально-интегральным, в сигнал управления третьим тиристорным управляемым выпрямителем 2.
Выходной сигнал второго контроллера 11 действует на входе третьего тиристорного управляемого выпрямителя 2, который поддерживает напряжение на выходе третьего тиристорного управляемого выпрямителя 2 таким образом, что обеспечивается режим работы системы, при котором рассогласование между заданным Ω0 и измеренным Ω значениями угловой скорости минимально (εΩ≈0). Второй контроллер 11, таким образом, обеспечивает регулирование угловой скорости электрических машин с подчиненным контуром регулирования тока третьего тиристорного управляемого выпрямителя 2. Заданное значение угловой скорости Ω0 при этом может поддерживаться постоянным или изменяться по программе.
Таким образом, в системе управления за счет обратной связи по напряжению с коррекцией по току якорной обмотки двигателя 9 и выходному току третьего тиристорного управляемого выпрямителя 2 обеспечивается поддержание заданного значения угловой скорости двигателя во всех режимах заданных значений угловой скорости и момента механической нагрузки.
Таким образом, предлагаемое техническое решение обеспечивает повышение точности поддержания угловой скорости в процессе испытаний и расширение функциональных возможностей способа испытания электрических машин постоянного тока путем регулирования, стабилизации или изменения по программе угловой скорости и момента механической нагрузки. При этом регулирование угловой скорости и момента нагрузки происходит независимо друг от друга.
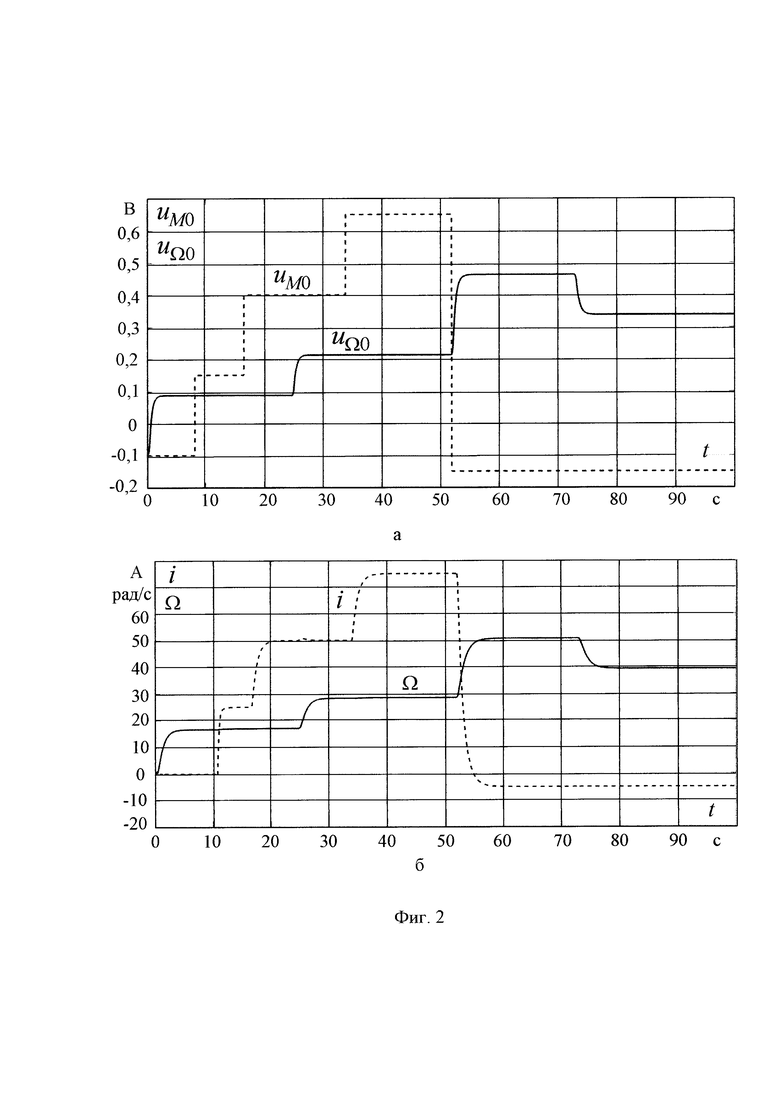
С целью подтверждения положительного эффекта, достигаемого при использовании предлагаемого технического решения, было выполнено имитационное моделирование системы испытаний электрических машин постоянного тока, реализованной по схеме, изображенной на фиг. 1. Параметры системы имели следующие значения.
Машина постоянного тока П2П-450-132-7УЗ (генератор):
Мощность - 400 кВт;
Напряжение - 460 В; Ток - 968 А;
Частота вращения - 1000/1250 об/мин;
Ток возбуждения - 14/28 А; Напряжение обмотки возбуждения - 200/100 В.
Машина постоянного тока П2П-450-132-7УЗ (двигатель):
Мощность - 400 кВт;
Напряжение - 440 В; Ток - 968 А;
Частота вращения - 1000 об/мин;
Ток возбуждения - 10/20 А; Напряжение обмотки возбуждения - 140/70 В.
Третий тиристорный управляемый выпрямитель: напряжение питания U=400 В;
На фиг. 2 приведены результаты моделирования системы, реализующей предлагаемый способ испытания электрических машин постоянного тока. На фиг. 2, а показаны осциллограммы изменения сигналов задания для момента нагрузки uМ0 и угловой скорости uΩ0. На фиг. 2, б приведены осциллограммы тока якорной обмотки двигателя / (ток пропорционален механическому моменту М) механического момента и угловой скорости Ω. Система обеспечивает поддержание заданных значений момента нагружения и угловой скорости и проведение испытания по программе.
Таким образом, использование в известном стенде для испытания электрических машин постоянного тока, содержащем две электрические машины, одна из которых выполняет функцию двигателя, а вторая выполняет функцию генератора, валы электрических машин жестко соединены с помощью муфты, а обмотки возбуждения подключены к выходам соответственно первого и второго тиристорных управляемых выпрямителей, два датчика тока, первый из которых включен последовательно с обмоткой возбуждения генератора, а второй соединен последовательно с якорной обмоткой двигателя, выходы первого и второго датчиков тока подключены к первому и второму входам контроллера, третий вход которого подключен к выходу задатчика режима испытаний, а выход подключен к управляющему входу второго тиристорного управляемого выпрямителя, задатчик тока возбуждения двигателя, подключенный выходом к управляющему входу первого тиристорного управляемого выпрямителя, третий тиристорный управляемый выпрямитель, вход которого объединен с входами первого и второго тиристорных управляемых выпрямителей и подключен к питающей сети, а выход соединен с параллельно включенными якорными обмотками двигателя и генератора, дополнительно датчика напряжения, третьего датчика тока, шина данных и второго контроллера, входы которого соединены с выходами третьего датчика тока, датчика напряжения и задатчика режима испытаний, а выход подключен к управляющему входу третьего управляемого выпрямителя, датчик напряжения и третий датчик тока подключены к выходу третьего управляемого выпрямителя, первый и второй контроллеры соединены шиной данных, обеспечивает повышение точности поддержания угловой скорости в процессе длительных испытаний и расширение функциональных возможностей стенда для испытания электрических машин постоянного тока путем регулирования, стабилизации или изменения по программе механического момента нагрузки и угловой скорости электрических машин.
Использование предлагаемого технического решения при испытаниях электрических машин постоянного тока позволит повысить технический уровень, надежность и точность результатов испытаний электрических машин постоянного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА И МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 2021 |
|
RU2779712C1 |
| ЭЛЕКТРОПРИВОД ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2020 |
|
RU2742674C1 |
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2020 |
|
RU2734182C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ АВТОСАМОСВАЛА | 2021 |
|
RU2757093C1 |
| СПОСОБ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА | 2011 |
|
RU2480778C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН В ДИНАМИЧЕСКОМ РЕЖИМЕ | 2014 |
|
RU2561230C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
Изобретение относится к электротехнике и позволяет повысить точность поддержания угловой скорости в процессе испытаний и расширить функциональные возможности метода взаимного нагружения при испытаниях электрических машин постоянного тока, а именно регулировать, стабилизировать или изменять по программе угловую скорость и механический момент нагрузки машин. Стенд содержит: 1 - питающую сеть; 2, 3 и 15 - соответственно третий, первый и второй управляемые выпрямители; 4 - задатчик тока возбуждения двигателя; 5 - датчик напряжения; 6, 10 и 8 - соответственно первый, второй и третий датчики тока; 7 и 14 - обмотки возбуждения соответственно двигателя и генератора; 9 и 12 - якорные обмотки соответственно двигателя и генератора; 11 и 13 - соответственно второй и первый контроллеры; 16 - задатчик режима испытаний; 17 - шину данных. Задание и регулирование механического момента осуществляется с помощью обратной связи по моменту, который вычисляется по измеренным значениям токов якорной обмотки 9 и обмотки возбуждения 7 и известной конструктивной постоянной двигателя. Задание и регулирование угловой скорости осуществляется с помощью обратных связей по угловой скорости, которая вычисляется по измеренным значениям выходных напряжения и тока третьего тиристорного управляемого выпрямителя 2 и тока якорной обмотки 9 двигателя. Техническим результатом при реализации заявленного решения является повышение точности и расширение функциональных возможностей, достигается тем, что способ испытания предусматривает косвенное измерение механического момента и угловой скорости и их автоматическое регулирование с помощью обратных связей и двух контроллеров, первый из которых изменяет ток возбуждения генератора в зависимости от сигнала задания и механического момента, а второй регулирует напряжение на выходе третьего тиристорного управляемого выпрямителя. 2 ил.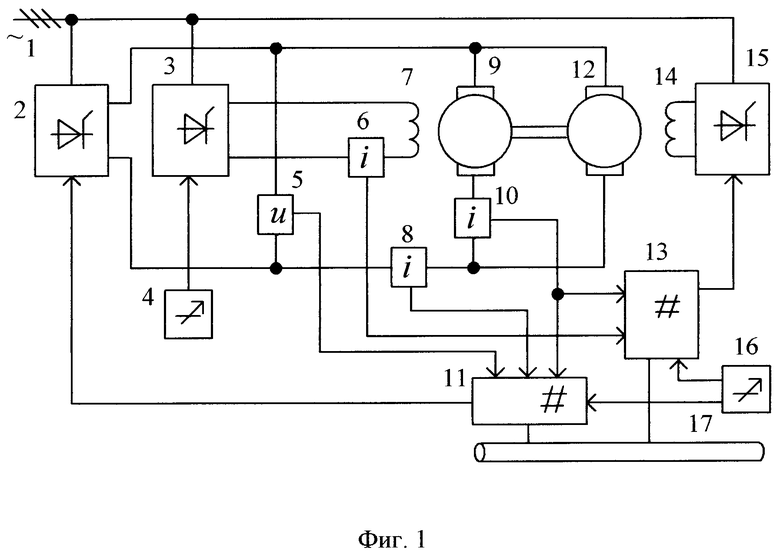
Стенд для испытания электрических машин постоянного тока, содержащий две электрические машины, одна из которых выполняет функцию двигателя, а вторая выполняет функцию генератора, валы электрических машин жестко соединены с помощью муфты, а обмотки возбуждения подключены к выходам соответственно первого и второго тиристорных управляемых выпрямителей, два датчика тока, первый из которых включен последовательно с обмоткой возбуждения двигателя, а второй соединен последовательно с якорной обмоткой двигателя, выходы первого и второго датчиков тока подключены к первому и второму входам контроллера, третий вход которого подключен к выходу задатчика режима испытаний, а выход подключен к управляющему входу второго тиристорного управляемого выпрямителя, задатчик тока возбуждения двигателя, подключенный выходом к управляющему входу первого тиристорного управляемого выпрямителя, третий тиристорный управляемый выпрямитель, вход которого объединен с входами первого и второго тиристорных управляемых выпрямителей и подключен к питающей сети, а выход соединен с параллельно включенными якорными обмотками двигателя и генератора, отличающийся тем, что дополнительно введены датчик напряжения, третий датчик тока, шина данных и второй контроллер, входы которого соединены с выходами третьего датчика тока, датчика напряжения и задатчика режима испытаний, а выход подключен к управляющему входу третьего управляемого выпрямителя, датчик напряжения и третий датчик тока подключены к выходу третьего управляемого выпрямителя, первый и второй контроллеры соединены шиной данных.
| 0 |
|
SU170708A1 | |
| 0 |
|
SU178539A1 | |
| СТЕНД ДЛЯ НАГРУЖЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА ПРИ ИСПЫТАНИЯХ | 1991 |
|
SU1814385A1 |
| СПОСОБ ПОЛУЧЕНИЯ АКРИЛОВОЙ КИСЛОТЫ | 0 |
|
SU184839A1 |
| CN 202693768 U, 23.01.2013 | |||
| CN 202166728 U, 14.03.2012. | |||

