Изобретение относится к электротехнике и может быть использовано для определения мест повреждения в кабельных линиях электропередачи.
Известно устройство для определения места повреждения кабеля (пат. РФ №2698939, авторы: Кашин Я.М., Кириллов Г.А., Шаршак А.А.), содержащее импульсный измеритель, радиотелефон, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным относительно оси симметрии свинцового контейнера влево, прижимаемого к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационностойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом на наружной стороне свинцового контейнера закреплен блок автономного управления, содержащий аккумуляторную батарею, при этом устройство дополнительно оборудовано блоком дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо», а свинцовый контейнер выполнен с зацепами, установлен на управляемом посредством блока дистанционного управления шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата, удерживающую раму, выполненную с возможностью вертикального перемещения посредством двух домкратов и с симметрично расположенными боковыми выступами, внутри которых нарезается внутренняя резьба, свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, блок автономного управления дополнительно содержит красную сигнальную лампу и зеленую сигнальную лампу, установленные в верхней его части, и электронный блок, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, а в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию от левого края свинцового затвора до правого края вертикального проходного канала. Каждый домкрат устройства содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу домкрата.
Недостатком этого устройства является высокая вероятность отклонения траектории движения устройства для определения места повреждения кабеля от трассы кабеля в зоне его повреждения.
Наиболее близким к заявляемому изобретению по технической сущности и принятым авторами за прототип является автономное устройство для определения места повреждения кабеля (пат РФ 2730384, авторы: Кашин Я.М., Кириллов Г.А., Селин А.Е.), содержащее импульсный измеритель, радиотелефоны, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным влево относительно оси симметрии свинцового контейнера, при этом свинцовый затвор прижат к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, а к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационностойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние l1 от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию l2 от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом свинцовый контейнер выполнен с зацепами и установлен на управляемом шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата и удерживающую раму, выполненную с симметрично расположенными боковыми выступами, внутри которых нарезана внутренняя резьба, и с возможностью вертикального перемещения посредством двух домкратов, при этом в нижней части несущей рамы на равном расстоянии от рулевых колес установлена рамочная антенна, ось которой перпендикулярна поверхности земли, а блок рулевого управления содержит электродвигатель, на валу которого жестко закреплена ведущая шестерня реечной передачи, при этом рулевые колеса соединены между собой рулевой рейкой, связанной со ступицами рулевых колес посредством шарниров, в центральной верхней части рулевой рейки жестко закреплена зубчатая рейка реечной передачи, а в ее центральной нижней части жестко закреплен потенциометр обратной связи, при этом свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, а на его наружной стороне закреплен блок автономного управления, содержащий аккумуляторную батарею, красную сигнальную лампу, зеленую сигнальную лампу, электронный блок, элемент выдержки времени и сравнивающий блок, имеющий первый вход, соединенный с выходом рамочной антенны, и второй вход, соединенный с движком потенциометра обратной связи, а в корпусе реечной передачи установлены правый и левый концевые выключатели, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние l3 от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию l4 от левого края свинцового затвора до правого края вертикального проходного канала, а каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом каждого домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу каждого домкрата.
Недостатком этого устройства также является высокая вероятность отклонения автономного устройства для определения места повреждения кабеля от места повреждения кабеля (то есть от фактической неоднородности волнового сопротивления) при движении его вдоль оси поврежденного кабеля в зоне его повреждения, так как расстояние первым оператором определяется визуально с экрана импульсного измерителя, а вторым оператором определяется визуально на местности по ходу движения автономного устройства. Второй оператор в связи с этим вынужден неоднократно перемещаться с источником радиоактивного излучения автономного устройства вдоль оси кабеля с целью нахождения места совпадения искусственно созданной неоднородности волнового сопротивления с фактической неоднородностью волнового сопротивления (местом повреждения) и выполнять соответственно включение и выключение устройства.
Задачей предлагаемого изобретения является усовершенствование автономного устройства для определения места повреждения кабеля, позволяющее обеспечить улучшение его эксплуатационных характеристик.
Технический результат заявленного изобретения - минимизация отклонения автономного устройства для определения места повреждения кабеля от места повреждения кабеля (фактической неоднородности волнового сопротивления) при движении его вдоль оси поврежденного кабеля в зоне его повреждения и сокращение времени определения места повреждения кабеля.
Технический результат достигается тем, что в автономном устройстве для определения места повреждения кабеля, содержащем импульсный измеритель, радиотелефоны, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным влево относительно оси симметрии свинцового контейнера, при этом свинцовый затвор прижат к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, а к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационностойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние l1 от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию l2 от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом свинцовый контейнер выполнен с зацепами и установлен на управляемом шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата и удерживающую раму, выполненную с симметрично расположенными боковыми выступами, внутри которых нарезана внутренняя резьба, и с возможностью вертикального перемещения посредством двух домкратов, при этом в нижней части несущей рамы на равном расстоянии от рулевых колес установлена рамочная антенна, ось которой перпендикулярна поверхности земли, а блок рулевого управления содержит электродвигатель, на валу которого жестко закреплена ведущая шестерня реечной передачи, при этом рулевые колеса соединены между собой рулевой рейкой, связанной со ступицами рулевых колес посредством шарниров, в центральной верхней части рулевой рейки жестко закреплена зубчатая рейка реечной передачи, а в ее центральной нижней части жестко закреплен потенциометр обратной связи, при этом свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, а на его наружной стороне закреплен блок автономного управления, содержащий аккумуляторную батарею, красную сигнальную лампу, зеленую сигнальную лампу, электронный блок, элемент выдержки времени и сравнивающий блок, имеющий первый вход, соединенный с выходом рамочной антенны, и второй вход, соединенный с движком потенциометра обратной связи, а в корпусе реечной передачи установлены правый и левый концевые выключатели, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние l3 от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию l4 от левого края свинцового затвора до правого края вертикального проходного канала, а каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на ради-ально-упорные подшипники, а удерживающая рама связана с валом каждого домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу каждого домкрата, дополнительно устанавливают блок измерения и преобразования расстояния БИПР, содержащий передающую антенну Ап и кнопки дистанционного управления «Старт», «Стоп», «Затвор», а в блок автономного управления БАУ дополнительно устанавливают выключатель «Питание» с контактами K1, К2, К3, К4, приемно-преобразующее устройство ППУ с первым, вторым, третьим выходами и приемной антенной Апр и устройство сравнения УС с первым и вторым входами, а электропривод ведущих колес дополнительно содержит датчик пройденного расстояния ДПР, при этом вход блока измерения и преобразования расстояния БИПР выполняют с возможностью подключения к выходу импульсного измерителя ИИ, а его выход подключают к передающей антенне Ап, а электронный блок ЭБ выполняют с первым, вторым и третьим входами, при этом первый вход электронного блока ЭБ подключают к первому выходу приемно-преобразующего устройства ППУ, второй вход - ко второму выходу приемно-преобразующего устройства ППУ, при этом к первому входу устройства сравнения УС подключают третий выход приемно-преобразующего устройства ППУ, к его второму входу подключают выход датчика пройденного расстояния ДПР, а к его выходу подключают третий вход электронного блока ЭБ.
Улучшение эксплуатационных характеристик автономного устройства для определения места повреждения кабеля достигается минимизацией его отклонения от места повреждения кабеля при движении его вдоль оси поврежденного кабеля в зоне его повреждения и сокращением времени отыскания места повреждения кабеля.
Это достигается тем, что предлагаемое устройство дополнительно оснащают блоком измерения и преобразования расстояния БИПР, содержащим передающую антенну Ап и кнопки дистанционного управления «Старт», «Стоп», «Затвор», а блок автономного управления БАУ дополнительно оснащают выключателем «Питание» с контактами K1, К2, К3, К4 и приемно-преобразующим устройством ППУ с приемной антенной Апр и устройством сравнения УС с первым и вторым входами, а электропривод ведущих колес дополнительно оснащают датчиком преобразования расстояния ДПР, при этом вход блока измерения и преобразования расстояния БИПР выполняют с возможностью подключения к выходу импульсного измерителя ИИ, а его выход подключают к передающей антенне Ап, к первому входу устройства сравнения УС подключают третий выход приемно-преобразующего устройства ППУ, к его второму входу подключают выход датчика преобразования расстояния ДПР, а к его выходу подключают третий вход электронного блока ЭБ.
Дополнительная установка блока измерения и преобразования расстояния БИПР, содержащего передающую антенну Ап и выполненного с возможностью подключения его входа к выходу импульсного измерителя ИИ, а его выхода - к передающей антенне Ап, позволяет автоматически рассчитать расстояние между фактической и искусственно созданной неоднородностями волнового сопротивления, определить место нахождения их друг относительно друга, выработать радиосигнал управления, пропорциональный расстоянию между неоднородностями и их взаимному расположению в поврежденном кабеле друг относительно друга, передать этот сигнал через передающую антенну Ап и приемную антенну Апр в блок автономного управления БАУ. Это исключает влияние человеческого фактора на результаты измерения, обеспечивает минимизацию отклонения предлагаемого устройства от места повреждения кабеля при движении его вдоль оси поврежденного кабеля в зоне его повреждения, и, соответственно, повышает точность перемещения автономного устройства до места повреждения кабеля, исключая его повторные перемещения и включения с целью подачи радиоактивного излучения в поврежденный кабель.
Выполнение электропривода ведущих колес с датчиком пройденного расстояния ДПР позволяет точно измерить пройденное предлагаемым устройством расстояние до места повреждения кабеля, преобразовать это расстояние в электрический сигнал, пропорциональный пройденному расстоянию, и подать его в устройство сравнения УС для сравнения его с сигналом, полученным из приемно-преобразующего устройства ППУ. При равенстве этих сигналов УС выдает управляющий сигнал в электронный блок ЭБ на прекращение перемещения автономного устройства, что исключает влияние человеческого фактора на точность перемещения предлагаемого устройства вдоль оси кабеля и повышает точность определения места повреждения кабеля.
Дополнительное оснащение предлагаемого устройства приемно-преобразующим устройством ППУ с первым, вторым, третьим выходами и приемной антенной Апр, устройством сравнения УС с первым и вторым входами, подключение к первому входу устройства сравнения УС третьего выхода приемно-преобразующего устройства ППУ, к его второму входу - выхода датчика пройденного расстояния ДПР, а к его выходу - третьего входа электронного блока ЭБ, выполнение электронного блока ЭБ с первым, вторым, третьим входами, подключение первого входа электронного блока ЭБ к первому выходу приемно-преобразующего устройства ППУ, второго входа - ко второму выходу приемно-преобразующего устройства ППУ позволяет принять и преобразовать полученный от БИПР радиосигнал в сигнал управления определенной длительности, амплитуды и полярности, несущий информацию о начальном расстоянии до места повреждения кабеля, запомнить его, сравнить с его с сигналом, полученным от ДПР о текущем расстоянии до места повреждения кабеля и автоматически сформировать управляющий сигнал в электронный блок ЭБ на прекращение перемещения автономного устройства при нахождении его над местом повреждения кабеля.
Это исключает влияние человеческого фактора на точность перемещения предлагаемого устройства вдоль оси кабеля и повышает точность определения места повреждения кабеля.
Установка кнопок дистанционного управления «Старт», «Стоп», «Затвор» на блоке измерения и преобразования расстояния БИПР позволяет дистанционно включать передачу радиосигналов с передающей антенны Ап на приемную антенну Апр приемно-преобразующего устройства ППУ. По этим сигналам формируются команды на опускание свинцового контейнера с источником радиоактивного излучения ИРИ и производство облучения поврежденного кабеля от источника радиоактивного излучения ИРИ (кнопка «Старт»), на прекращение облучения, подъем свинцового контейнера с источником радиоактивного источника излучения ИРИ и приведение автономного устройства в готовность к передвижению по трассе (кнопка «Стоп»), на передачу автоматически рассчитанного в блоке измерения и преобразования БИПР сигнала, пропорционального расстоянию между неоднородностями волнового сопротивления и взаимному расположению их друг относительно друга и формирование команды на перемещение устройства в сторону, соответствующую полярности сигнала управления, на расстояние, точно равное расстоянию между неоднородностями волнового сопротивления (кнопка «Затвор»).
Таким образом, установка кнопок дистанционного управления позволяет исключить влияние человеческого фактора на точность перемещения автономного устройства до места повреждения кабеля, исключить непроизводительные повторные перемещения устройства и повторные включения с целью подачи радиоактивного излучения в поврежденный кабель, а исключить также нецелесообразные многократные перемещения второго оператора от места расположения предлагаемого устройства на безопасное расстояние и обратно, что в свою очередь, сокращает время определения места повреждения кабеля.
Оснащение блока автономного управления БАУ выключателем «Питание» с контактами K1, К2, К3, К4 позволяет обеспечить отключение электропитания предлагаемого устройства в транспортировочном состоянии, что позволяет предотвратить самопроизвольное его включение. Это дополнительно обеспечивает повышение радиационной безопасности.
Таким образом, совокупность предлагаемых признаков позволяет улучшить эксплуатационные характеристики предлагаемого автономного устройства для определения места повреждения кабеля за счет минимизации отклонения автономного устройства для определения места повреждения кабеля от места повреждения кабеля при движении его вдоль оси поврежденного кабеля в зоне его повреждения, а также сократить время определения места повреждения кабеля.
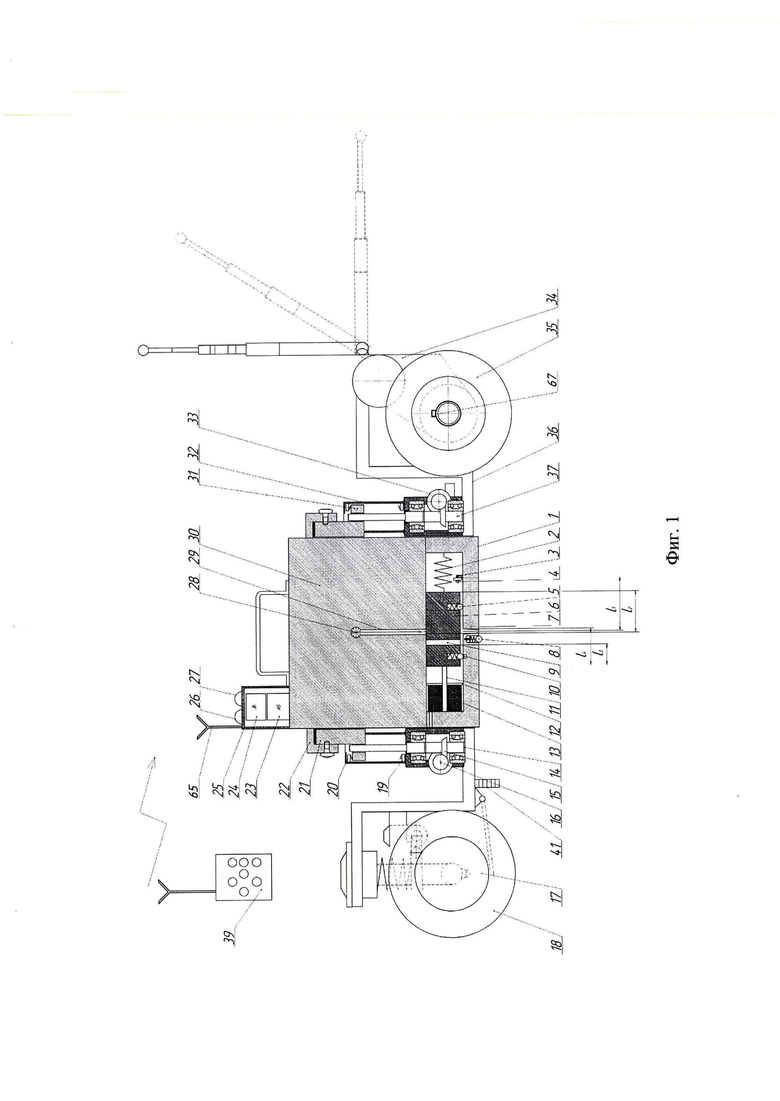
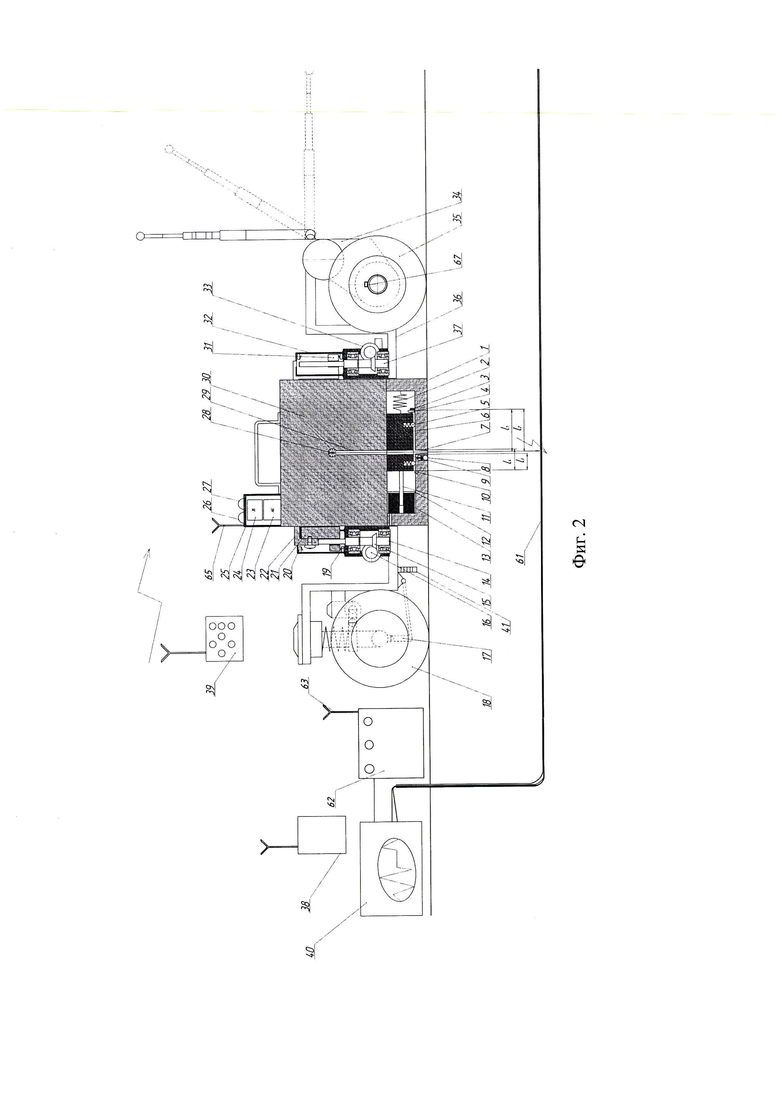
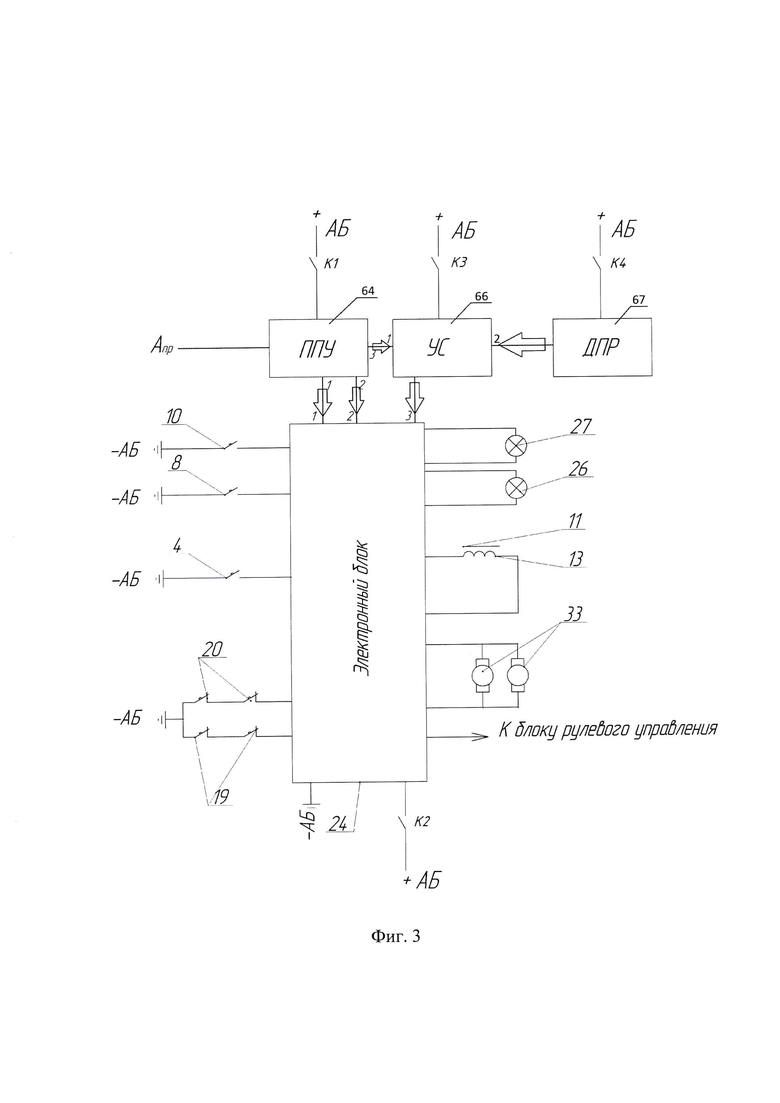
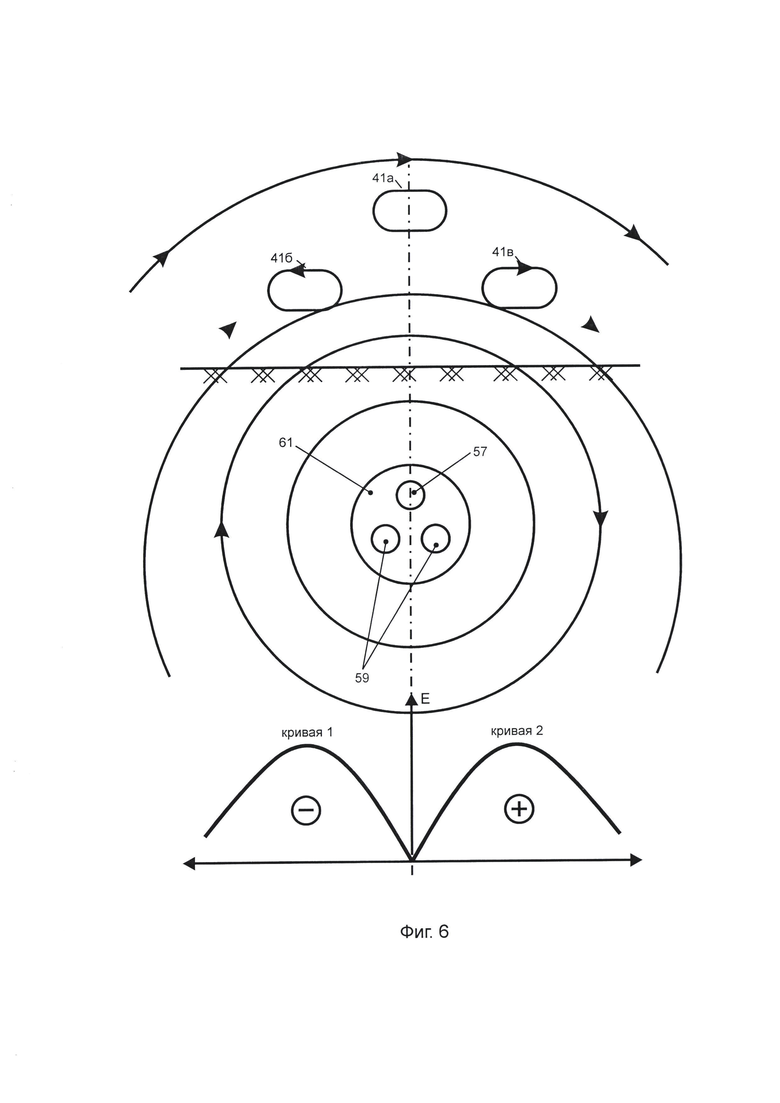
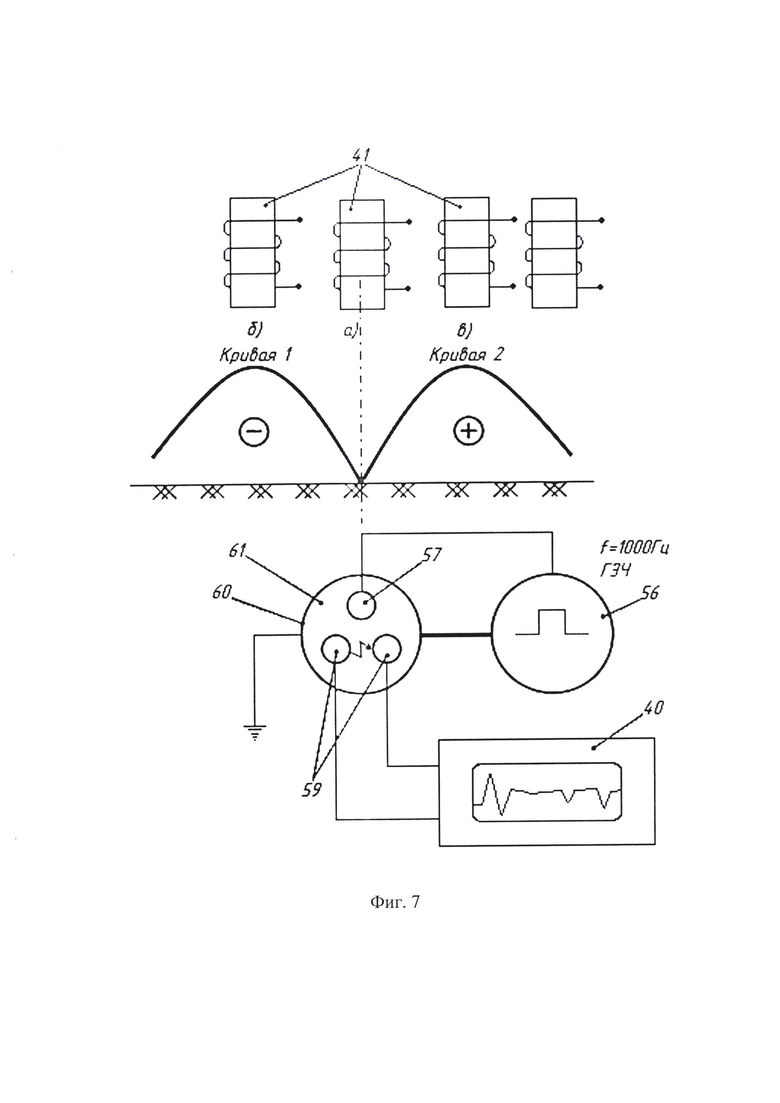
На фиг. 1 представлено предлагаемое автономное устройство для определения места повреждения кабеля с затворным устройством, установленным в исходное положение, на фиг. 2 - предлагаемое автономное устройство с поврежденным кабелем в момент воздействия на него радиоактивного γ-излучения и создания в изоляции кабеля искусственной волновой неоднородности, на фиг. 3 - схема соединения электронного блока с исполнительными механизмами, органами сигнализации и управления, на фиг. 4 - блок-схема автономного управления направлением движения автономного устройства, на фиг. 5 - реечная передача с рулевой рейкой, на фиг. 6 - распределение ЭДС и изменение фазы сигнала в рамке рамочной антенны, на фиг. 7 - график изменения ЭДС, наводимой в рамочной антенне (7а - рамочная антенна находится на оси трассы поврежденного кабеля, 7б - слева от нее, 7в - справа от нее), на фиг. 8 - блок-схема управления продольным движением автономного устройства.
Автономное устройство для определения места повреждения кабеля содержит (фиг. 1, фиг. 2) импульсный измеритель 40, радиотелефоны 38 и 39, источник радиоактивного излучения 28, установленный в центре свинцового контейнера 30 в расположенном по его оси симметрии вертикальном канале 29. В нижней части свинцового контейнера 30 установлен затворный механизм, состоящий из свинцовой крышки 1, по центру которой выполнен вертикальный узконаправленный выходной канал 7, расположенный на одной оси с вертикальным каналом 29 свинцового контейнера 30, и установленного внутри свинцовой крышки 1 свинцового затвора 6 с вертикальным проходным каналом 9, смещенным влево относительно оси симметрии свинцового контейнера 30. Свинцовый затвор 6 прижат к нижней части свинцового контейнера 30 прижимными пружинами с шариками 5. Свинцовый затвор 6 имеет возможность плавно перемещаться вдоль нижней части свинцового контейнера 30 до полного совмещения вертикального проходного канала 9 свинцового затвора 6 с вертикальным каналом 29 свинцового контейнера 30 и вертикальным узконаправленным выходным каналом 7 свинцовой крышки 1 по оси симметрии свинцового контейнера 30. Свинцовый затвор 6 своей правой торцевой частью упруго связан со свинцовой крышкой 1 распорной пружиной 2. К левой внутренней стороне свинцовой крышки 1 жестко прикреплен выталкивающий электромагнит 12, состоящий из радиационностойкой обмотки 13 и стального стержня-якоря 11, жестко прикрепленного к левой стороне свинцового затвора 6. В нижней правой части свинцовой крышки 1 установлен упор 3, расстояние l1 от которого до оси симметрии вертикального канала 29 свинцового контейнера 30 выполнено равным расстоянию l2 от оси симметрии вертикального проходного канала 9 до правого края свинцового затвора 6. Свинцовый контейнер 30 выполнен с зацепами 22 и установлен на управляемом шасси, содержащем несущую раму 36, ведущие колеса 35, рулевые колеса 18, блок рулевого управления 17, электропривод ведущих колес 34, два домкрата 32 и удерживающую раму 21, выполненную с симметрично расположенными боковыми выступами 31, внутри которых нарезана внутренняя резьба, и с возможностью вертикального перемещения посредством двух домкратов 32. В нижней части несущей рамы 36 на равном расстоянии от рулевых колес 18 установлена рамочная антенна 41, ось которой перпендикулярна поверхности земли. Блок рулевого управления 17 содержит электродвигатель 44, на валу 45 которого жестко закреплена ведущая шестерня 50 реечной передачи. Рулевые колеса 18 соединены между собой рулевой рейкой 46, связанной со ступицами 48 рулевых колес 18 посредством шарниров 47 и 49. В центральной верхней части рулевой рейки 46 жестко закреплена зубчатая рейка 51 реечной передачи, а в ее центральной нижней части жестко закреплен потенциометр 54 обратной связи. Свинцовый контейнер 30 жестко закреплен в удерживающей раме 21 посредством зацепов 22, а на его наружной стороне закреплен блок автономного управления БАУ 25, содержащий аккумуляторную батарею АБ 23, красную сигнальную лампу 26, зеленую сигнальную лампу 27, электронный блок ЭБ 24, элемент выдержки времени 43 и сравнивающий блок 42, имеющий первый вход, соединенный с выходом рамочной антенны 41, и второй вход, соединенный с движком потенциометра 55 обратной связи. В корпусе 53 реечной передачи установлены правый 52 и левый 56 концевые выключатели. На упоре 3 со стороны свинцового затвора 6 установлен сигнальный концевой микровыключатель 4, в нижней наружной части свинцовой крышки 1 установлен нижний концевой выключатель 8, в нижней внутренней части свинцовой крышки 1 слева от вертикального узконаправленного выходного канала 7 свинцовой крышки 1 установлен сигнальный промежуточный микровыключатель 10, расстояние l3 от правого края которого до левого края вертикального канала 29 свинцового контейнера 30 выполнено равным расстоянию l4 от левого края свинцового затвора 6 до правого края вертикального проходного канала 9. Каждый домкрат 32 содержит электродвигатель 33, вал 37 домкрата 32 с внешней подъемной резьбой, два концевых выключателя 20 крайнего верхнего и два концевых выключателя 19 крайнего нижнего положений удерживающей рамы 21. Вал каждого электродвигателя 33 связан с валом 37 соответствующего домкрата 32 посредством червячной передачи, состоящей из червяка 16, нарезанного на валу электродвигателя 33, и червячного колеса 15, жестко закрепленного на валу 37 домкрата 32, опирающегося на радиально-упорные подшипники 14. Удерживающая рама 21 связана с валом 37 каждого домкрата 32 посредством внутренней резьбы, нарезанной в ее боковых выступах 31, и внешней подъемной резьбы, нарезанной на валу 37 каждого домкрата 32.
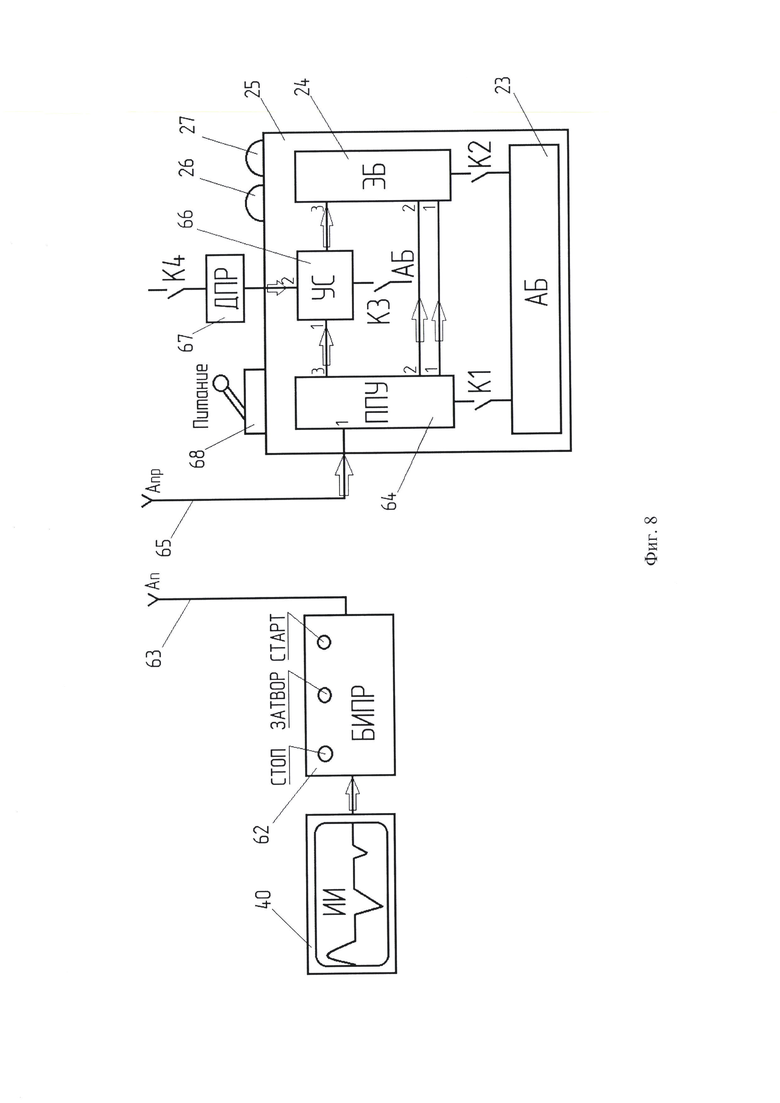
Автономное устройство дополнительно содержит блок измерения и преобразования расстояния БИПР 62, содержащий передающую антенну Ап 63 и кнопки дистанционного управления «Старт», «Стоп», «Затвор». Блок автономного управления БАУ 25 дополнительно содержит выключатель «Питание» 68 с контактами K1, К2, К3, К4, приемно-преобразующее устройство ППУ 64 с первым, вторым и третьим выходами и приемной антенной Апр 65 и устройство сравнения УС 66 с первым и вторым входами. Электропривод ведущих колес 35 дополнительно содержит датчик пройденного расстояния ДПР 67.
Вход блока измерения и преобразования расстояния БИПР 62 выполнен с возможностью подключения к выходу импульсного измерителя ИИ 40, а его выход подключен к передающей антенне Ап 63.
Электронный блок ЭБ 24 выполнен с первым, вторым и третьим входами. Первый вход электронного блока ЭБ 24 подключен к первому выходу приемно-преобразующего устройства ППУ 64, второй вход - ко второму выходу приемно-преобразующего устройства ППУ 64,
К первому входу устройства сравнения УС 66 подключен третий выход приемно-преобразующего устройства ППУ 64, к его второму входу подключен выход датчика пройденного расстояния ДПР 67, а к его выходу подключен третий вход электронного блока ЭБ 24.
Точное определение места повреждения кабеля с помощью предлагаемого устройства осуществляется двумя операторами.
Первый оператор посредством мегомметра известным способом определяет исправные и неисправные жилы поврежденного кабеля 61 (фиг. 2, 6, 7). Второй оператор выезжает на другой конец поврежденного кабеля 61, отсоединяет все жилы поврежденного кабеля 61 от шин распределительного устройства подстанции (на фиг. 2, 6, 7 не показаны, как не имеющие отношения к существу изобретения), а исправную жилу 57 поврежденного кабеля 61 подсоединяет к заземленной оболочке 60 (фиг. 7) поврежденного кабеля 61. Затем первый оператор подключает к неисправным жилам 59 поврежденного кабеля 61 импульсный измеритель 40 (фиг. 2, 7) и определяет зону повреждения кабеля 61 на трассе с местом его повреждения, которое фиксируется на экране импульсного измерителя ИИ 40 в виде импульса отражения зондирующего сигнала от места повреждения (фактической неоднородности волнового сопротивления) и визуально наблюдается на экране импульсного измерителя ИИ 40 первым оператором. Затем он подключает к исправной жиле 57 и заземленной оболочке 60 поврежденного кабеля 61 генератор звуковой частоты ГЗЧ 58 (фиг. 6, 7), генерирующий импульсы напряжения положительной полярности. В результате этого от генератора звуковой частоты ГЗЧ 58 по исправной жиле 57 поврежденного кабеля 61 протекает импульсный ток положительной полярности, который возвращается к генератору звуковой частоты ГЗЧ 58 через оболочку 60 поврежденного кабеля 61, частично растекаясь в земле через многочисленные контакты оболочки 60 поврежденного кабеля 61 с землей, образуя одиночный ток исправной жилы 57.
Второй оператор с автономным устройством для определения места повреждения кабеля 61 по команде первого оператора, подаваемой им по радиотелефону 38, направляется в зону повреждения кабеля 61. По прибытии в зону повреждения кабеля 61 второй оператор определяет кабелеискателем точное расположение оси поврежденного кабеля 61 на трассе, производит осмотр трассы в зоне повреждения на предмет отсутствия посторонних предметов, строительного мусора и наличия ям или котлованов и, при необходимости, расчищает трассу. После этого он устанавливает автономное устройство для определения места повреждения кабеля над предполагаемым местом повреждения кабеля 61 в зоне его повреждения, включает автономное устройство выключателем «Питание» 68. При этом контакты K1, К2, К3, К4 выключателя «Питание» 68 замыкаются и подключают аккумуляторную батарею АБ 23 к приемно-преобразующему устройству ППУ 64, датчику пройденного расстояния ДПР 67, устройству сравнения УС 66 и электронному блоку ЭБ 24. в режим готовности к работе. После этого второй оператор отходит на безопасное расстояние и докладывает о готовности по радиотелефону 39 первому оператору.
Первый оператор, приняв доклад о готовности автономного устройства к работе, предупреждает второго оператора о взятии управления перемещением автономного устройства для определения места повреждения кабеля вдоль трассы кабеля на себя.
Затем первый оператор нажимает кнопку «Затвор» на блоке измерения и преобразования БИПР 62. Радиосигнал с БИПР 62 поступает через передающую антенну Ап 63 на приемную антенну Апр 65 приемно-преобразующего устройства ППУ 64, которое преобразует поступивший с блока измерения и преобразования БИПР 62 радиосигнал в сигнал управления и передает его со своего первого выхода на первый вход электронного блока ЭБ 24 блока автономного управления БАУ 25 на опускание свинцового контейнера 30. При этом напряжение от аккумуляторной батареи АБ 23 через замкнутые контакты сигнального промежуточного микровыключателя 10 подается на зеленую сигнальную лампу 27, которая загорается, информируя второго оператора о том, что вертикальные каналы не совмещены. Одновременно электронный блок ЭБ 24 через замкнутые контакты концевых выключателей 19 (фиг. 1-3), крайнего нижнего положения удерживающей рамы 21 входящие в цепь управления электродвигателями 33 (на фиг. 3 не обозначена, как не имеющая отношения к существу изобретения) подает напряжение прямой полярности от аккумуляторной батареи АБ 23 на электродвигатели 33 домкрата 32. В результате этого валы 37 электродвигателей 33 домкратов 32 начинают вращаться в прямом направлении, передавая вращение через червяки 16, нарезанные на валах электродвигателей 33 на червячные колеса 15, жестко закрепленные на валах 37 домкратов 32, опирающихся на радиально-упорные подшипники 14. В результате этого удерживающая рама 21 вместе с закрепленным в ней посредством зацепов 22 свинцовым контейнером 30 начинает перемещаться относительно несущей рамы 36 вниз. Как только удерживающая рама 21 займет относительно несущей рамы 36 крайнее нижнее положение, ее боковые выступы 31 коснутся концевых выключателей 19 крайнего нижнего положения удерживающей рамы 21, контакты которых разомкнутся и отключат подачу напряжения прямой полярности от аккумуляторной батареи АБ 23 на электродвигатели 33 домкратов 32. В результате этого удерживающая рама 21 с закрепленным в ней свинцовым контейнером 30 остановится, дно свинцовой крышки 1 коснется поверхности земли. При этом нижний концевой выключатель 8 замыкается и подключает радиационностойкую обмотку 13 к аккумуляторной батарее АБ 23. В результате этого под действием напряжения аккумуляторной батареи АБ 23 по радиационностойкой обмотке 13 протекает электрический ток, который создает магнитный поток, выталкивающий стальной стержень-якорь 11 выталкивающего электромагнита 12, жестко прикрепленный к левой стороне свинцового затвора 6, вправо. В результате этого свинцовый затвор 6, прижатый прижимными пружинами с шариками 5 к нижней части крышки 1 свинцового контейнера 30, смещается по горизонтали вправо до упора 3, расстояние от которого до оси симметрии вертикального канала 29 свинцового контейнера 30 равно расстоянию от оси симметрии вертикального проходного канала 7 до правого края свинцового затвора 6. При этом распорная пружина 2 сжимается, а по оси симметрии свинцового контейнера 30 полностью совмещаются все три канала: вертикальный канал 29 свинцового контейнера 30, вертикальный проходной канал 9 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. Одновременно сигнальный концевой микровыключатель 4 замыкается и подключает красную сигнальную лампу 26, установленную в верхней части блока автономного управления 25, к аккумуляторной батарее АБ 23. Под действием напряжения аккумуляторной батареи АБ 23 электрический ток протекает через красную сигнальную лампу 26, которая загорается, информируя второго оператора о том, что полностью совмещены все три канала: вертикальный канал 29 свинцового контейнера 30, вертикальный проходной канал 9 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. При этом контакты сигнального промежуточного микровыключателя 10 (фиг. 3) размыкаются, γ-излучение от ИРИ 28 через полностью совмещенные каналы свободно проходит во внешнюю среду, воздействуя через слой земли на поврежденный кабель 61 (фиг. 2), вызывая в его изоляции обратимые изменения типа сконцентрированной искусственной волновой неоднородности, от которой отражается зондирующий сигнал, фиксируемый визуально в виде импульса отражения зондирующего сигнала на экране импульсного измерителя ИИ 40 первым оператором и автоматически записывается в память импульсного измерителя ИИ 40. Одновременно с выхода импульсного измерителя ИИ 40 оба отраженных от неоднородностей волнового сопротивления сигнала подаются на вход блока измерения и преобразования расстояния БИПР 62 и автоматически записываются в его память.
После появления на экране импульсного измерителя ИИ 40 и автоматически записанных в память импульсного измерителя ИИ 40 и блока измерения и преобразования расстояния БИПР 62 обоих отраженных сигналов, первый оператор нажимает кнопку «Стоп» на блоке измерения и преобразования расстояния БИПР 62. В результате этого блок измерения и преобразования расстояния БИПР 62 преобразует аналоговый сигнал в радиосигнал. При нажатии кнопки «Стоп» этот сигнал передается передающей антенной Ап 63 и принимается приемной антенной Апр 65 приемно-преобразующего устройства ППУ 64, расположенными в блоке автономного управления БАУ 25. БАУ 25 преобразует поступивший радиосигнал в аналоговый сигнал управления определенной длительности, амплитуды и полярности. Этот сигнал со второго выхода ППУ 64 поступает на второй вход электронного блока ЭБ 24, который отключает радиационностойкую обмотку 13 выталкивающего электромагнита 12 от аккумуляторной батареи АБ 23, электрический ток по радиационностойкой обмотке 13 не протекает, магнитный поток исчезает, свинцовый затвор 6 под действием распорной пружины 2 перемещается влево в свое первоначальное положение. При этом сигнальный концевой микровыключатель 4 размыкается, красная сигнальная лампа 26 гаснет, сигнальный промежуточный микровыключатель 10 замыкается, зеленая сигнальная лампа 27 загорается, а электронный блок 24 переключает цепь управления электродвигателями 33 домкратов 32 через концевые выключатели 20 крайнего верхнего положения удерживающей рамы 21 на напряжение обратной полярности от аккумуляторной батареи АБ 23. В результате этого удерживающая рама 21 перемещается вверх до тех пор, пока ее боковые выступы 31 не коснутся концевых выключателей 20 крайнего верхнего положения удерживающей рамы 21.
Как только удерживающая рама 21 займет относительно несущей рамы 36 крайнее верхнее положение, ее боковые выступы 31 коснутся концевых выключателей 19 крайнего нижнего положений удерживающей рамы 21, которые разомкнутся и отключат подачу напряжения обратной полярности от аккумуляторной батареи АБ 23 на электродвигатели 33 домкратов 32. Удерживающая рама 21 остановится в крайнем верхнем (транспортировочном) положении.
Импульсы, отраженные от фактической неоднородности волнового сопротивления и искусственно созданной неоднородности волнового сопротивления, визуально фиксируемые на экране импульсного измерителя ИИ 40 первым оператором, одновременно с выхода импульсного измерителя ИИ 40 поступают на вход блока измерения и преобразования расстояния БИПР 62. БИПР 62 автоматически вычисляет расстояния между двумя неоднородностями волнового сопротивления, определяет их положение друг относительно друга и преобразует расстояние между ними в радиосигнал определенной длительности, амплитуды и полярности, пропорциональный измеренному расстоянию и взаимному расположению неоднородностей друг относительно друга.
После анализа поступивших от неоднородностей сигналов на экран импульсного измерителя ИИ 40 первый оператор нажимает кнопку «Старт» на блоке измерения и преобразования расстояния БИПР 62. При этом значение радиосигнала, поступившего из блока измерения и преобразования расстояния БИПР 62 через передающую антенну Ап 63 поступает на приемную антенну Апр 65 приемно-преобразующего устройства ППУ 64, где преобразуется в аналоговый сигнал управления, пропорциональный по длительности и амплитуде измеренному расстоянию между неоднородностями и полярности нахождения неоднородностей относительно друг друга. С третьего выхода ППУ 64 аналоговый сигнал управления подается на первый вход устройства сравнения УС 66, которое запоминает значение этого сигнала по длительности, амплитуде и полярности и со своего выхода подает его на третий вход электронного блока ЭБ 24. Электронный блок ЭБ 24 посылает импульс напряжения определенной длительности, амплитуды и полярности на обмотку управления электроприводом 34 ведущих колес 35 (на фиг. 1-3 не показана, как не относящаяся к существу изобретения), электропривод 34 приводит ведущие колеса 35 во вращение, и предлагаемое устройство перемещается в сторону, соответствующую полярности аналогового сигнала управления. Второй оператор осуществляет визуальный контроль за перемещением автономного устройства, находясь на безопасном расстоянии от него.
Одновременно с перемещением автономного устройства по трассе кабеля одиночный ток исправной жилы 57 поврежденного кабеля 61 создает вокруг нее магнитное поле (фиг. 6, 7), силовые линии которого пересекают витки рамочной антенны 41 (фиг. 6, 7, поз. 41б и 41в). Вследствие этого в витках рамочной антенны 41 наводится ЭДС, величина и полярность которой зависят от направления отклонения и расстояния от рамочной антенны 41 до оси поврежденного кабеля 61. При этом при перемещении рамочной антенны 41 влево фаза ЭДС отрицательна (фиг. 6, 7, поз .41б, кривая 1), а при перемещении вправо - положительна (фиг. 6, 7, поз. 41 в, кривая 2). Если предлагаемое автономное устройство перемещается вдоль оси поврежденного кабеля 61 (рамочная антенна 41 находится точно над осью поврежденного кабеля 61 (фиг. 6, 7, поз. 41а), то силовые линии магнитного поля, созданного одиночным током, протекающим в исправной жиле 57 поврежденного кабеля 61, скользят вдоль плоскости витков рамочной антенны 41, наводя в ней минимальную (практически равную нулю) ЭДС, поэтому напряжение на выходе рамочной антенны 41, находящейся точно над осью поврежденного кабеля 61 (фиг. 6, 7 поз. 41а), равно нулю.
Если предлагаемое автономное устройство отклоняется от оси поврежденного кабеля 63 вправо (фиг. 6, 7, поз. 41в) или влево (фиг. 6, 7, поз. 41б), то ЭДС, наводимая в рамочной антенне 41, увеличивается, так как силовые линии магнитного поля пересекают плоскость витков рамочной антенны 41 под постепенно увеличивающимся углом в зависимости от расстояния от предлагаемого автономного устройства и, следовательно, рамочной антенны 41, до оси поврежденного кабеля 61. Увеличение ЭДС будет происходить до определенного значения, а затем значение ЭДС уменьшается, так как воздействие магнитного поля ослабевает пропорционально квадрату расстояния от рамочной антенны 41 до оси поврежденного кабеля 61. При отклонении предлагаемого автономного устройства с рамочной антенной 41 вправо по ходу движения в рамочной антенне 41 будет наводиться ЭДС положительной полярности (фиг. 6, 7, кривая 2), а при отклонении влево - отрицательной полярности (фиг. 6, 7, кривая 1).
Выходное напряжение рамочной антенны 41 соответствующей полярности подается на первый вход сравнивающего блока 42, с выхода которого напряжение через элемент выдержки времени 43 поступает на управляющую обмотку (на фиг. 1-3 не показана, как не имеющая отношения к существу изобретения) электродвигателя 44, который при этом начинает вращать в соответствующем направлении (в зависимости от полярности напряжения на выходе рамочной антенны 41) через вал 45 ведущую шестерню 50 реечной передачи. Вращательное движение ведущей шестерни 50 преобразуется в поступательное движение зубчатой рейки 51 (фиг. 5), жестко закрепленной в центральной верхней части рулевой рейки 46. Зубчатая рейка 51 перемещается вправо или влево, перемещая вместе с собой рулевую рейку 46, которая через шарниры 47 и 49, посредством которых она связана со ступицей 48 рулевых колес 18, поворачивает рулевые колеса 18 в соответствующую сторону. Одновременно напряжение с движка 55 потенциометра 54 обратной связи подается на второй вход сравнивающего блока 42, где сравнивается с напряжением, поступающим на первый вход сравнивающего блока 42 с выхода рамочной антенны 41. При равенстве напряжений, поступающих на первый и второй входы сравнивающего блока 42, напряжение на его выходе равно нулю. Соответственно, подача напряжения на управляющую обмотку электродвигателя 44 прекращается, вал 45, на котором жестко закреплена ведущая шестерня 50 реечной передачи не вращается, поступательное движение зубчатой рейки 51 реечной передачи вправо (влево), а соответственно и рулевой рейки 46 прекращается, поворот рулевых колес 18 прекращается. При достижении зубчатой рейкой 51 реечной передачи крайнего правого или крайнего левого положения срабатывает установленный в корпусе 53 реечной передачи правый 52 или левый 56 концевой выключатель соответственно. Сработавший концевой выключатель (правый 52 или левый 56) размыкает соответствующую цепь управления электродвигателем 44 (на фиг. 4 не показана, как не имеющая отношения к существу изобретения).
Одновременно с выхода датчика пройденного расстояния ДПР 67 на второй вход устройства сравнения поступает напряжение, пропорциональное пройденному автономным устройством расстоянию вдоль оси поврежденного кабеля 61. Перемещение автономного устройства будет продолжаться до тех пор, пока поступающее с датчика пройденного расстояния ДПР 67 на второй вход устройства сравнения УС 66 напряжение по значению не будет равно напряжению, поступившему на первый вход устройства сравнения УС 66 с третьего выхода приемно-преобразующего устройства ППУ 64. При равенстве напряжений, поступающих на первый и второй входы, устройство сравнения УС 66 выдает сигнал в электронный блок ЭБ 24 на отключение обмотки управления электроприводом 34 ведущих колес 35. После чего электронный блок ЭБ 24 отключает электропривод 34 ведущих колес 35 и автономное устройство прекращает движение. Место остановки автономного устройства для определения места повреждения кабеля на трассе является точным местом повреждения кабеля 61.
Предлагаемое изобретение, выполняя функцию известного автономного устройства для определения места повреждения кабеля, в то же время в отличие от него позволяет улучшить его эксплуатационные характеристики путем автоматизации управления продольным движением, что позволяет минимизировать отклонения автономного устройства от места повреждения кабеля при его продольном движении в зоне повреждения кабеля, исключить повторные передвижения и включения устройства в работу, что повышает точность определения места повреждения кабеля и сокращает время определения места повреждения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономное устройство для определения места повреждения кабеля | 2019 |
|
RU2730384C1 |
| Устройство для определения места повреждения подводного кабеля | 2022 |
|
RU2791677C1 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698939C1 |
| Устройство для определения места повреждения кабеля | 2019 |
|
RU2725168C1 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698940C1 |
| Устройство для определения места повреждения кабеля | 2017 |
|
RU2650081C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ | 2015 |
|
RU2585323C1 |
| Измерительный комплекс для поиска и диагностики подземных коммуникаций | 2018 |
|
RU2687236C1 |
| Лазерное устройство для определения глубины залегания кабеля | 2024 |
|
RU2831071C1 |
| Лазерное устройство для определения глубины залегания кабеля | 2024 |
|
RU2831073C1 |

Изобретение относится к электротехнике и может быть использовано для определения мест повреждения в кабельных линиях электропередачи. Технический результат заявленного изобретения - минимизация отклонения автономного устройства для определения места повреждения кабеля от места повреждения кабеля. Автономное устройство для определения места повреждения кабеля содержит импульсный измеритель, радиотелефоны, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, затворный механизм, прижимные пружины с шариками, выталкивающий электромагнит, состоящий из радиационно-стойкой обмотки и стального стержня-якоря, управляемое шасси, содержащее несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата и удерживающую раму, выполненную с симметрично расположенными боковыми выступами, блок автономного управления, содержащий аккумуляторную батарею, сигнальные лампы, электронный блок, элемент выдержки времени и сравнивающий блок, а электропривод ведущих колес дополнительно содержит датчик пройденного расстояния. 8 ил.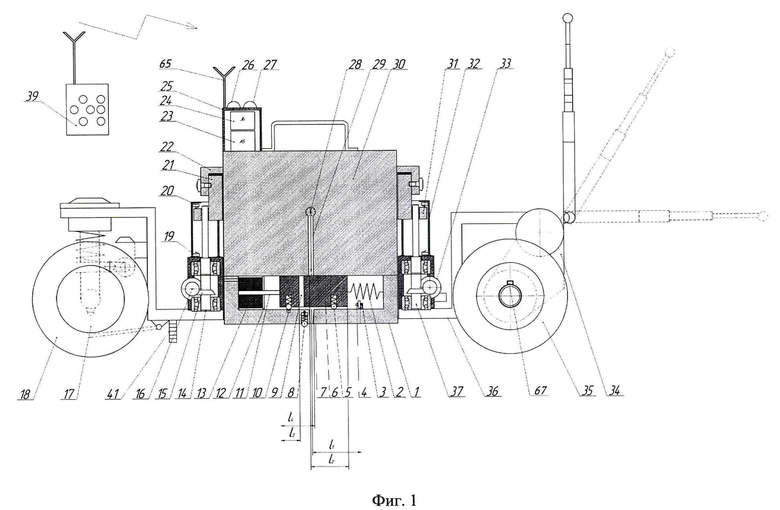
Автономное устройство для определения места повреждения кабеля, содержащее импульсный измеритель, радиотелефоны, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным влево относительно оси симметрии свинцового контейнера, при этом свинцовый затвор прижат к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, а к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационностойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние l1 от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию l2 от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом свинцовый контейнер выполнен с зацепами и установлен на управляемом шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата и удерживающую раму, выполненную с симметрично расположенными боковыми выступами, внутри которых нарезана внутренняя резьба, и с возможностью вертикального перемещения посредством двух домкратов, при этом в нижней части несущей рамы на равном расстоянии от рулевых колес установлена рамочная антенна, ось которой перпендикулярна поверхности земли, а блок рулевого управления содержит электродвигатель, на валу которого жестко закреплена ведущая шестерня реечной передачи, при этом рулевые колеса соединены между собой рулевой рейкой, связанной со ступицами рулевых колес посредством шарниров, в центральной верхней части рулевой рейки жестко закреплена зубчатая рейка реечной передачи, а в ее центральной нижней части жестко закреплен потенциометр обратной связи, при этом свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, а на его наружной стороне закреплен блок автономного управления, содержащий аккумуляторную батарею, красную сигнальную лампу, зеленую сигнальную лампу, электронный блок, элемент выдержки времени и сравнивающий блок, имеющий первый вход, соединенный с выходом рамочной антенны, и второй вход, соединенный с движком потенциометра обратной связи, а в корпусе реечной передачи установлены правый и левый концевые выключатели, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние l3 от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию l4 от левого края свинцового затвора до правого края вертикального проходного канала, а каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом каждого домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу каждого домкрата, отличающееся тем, что дополнительно содержит блок измерения и преобразования расстояния, содержащий передающую антенну и кнопки дистанционного управления «Старт», «Стоп», «Затвор», а блок автономного управления дополнительно содержит выключатель «Питание» с контактами K1, К2, К3, К4, приемно-преобразующее устройство с первым, вторым, третьим выходами и приемной антенной и устройство сравнения с первым и вторым входами, а электропривод ведущих колес дополнительно содержит датчик пройденного расстояния, при этом вход блока измерения и преобразования расстояния выполнен с возможностью подключения к выходу импульсного измерителя, а его выход подключен к передающей антенне, а электронный блок выполнен с первым, вторым, третьим входами, при этом первый вход электронного блока подключен к первому выходу приемно-преобразующего устройства, второй вход - ко второму выходу приемно-преобразующего устройства, при этом к первому входу устройства сравнения подключен третий выход приемно-преобразующего устройства, к его второму входу подключен выход датчика пройденного расстояния, а к его выходу подключен третий вход электронного блока.
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698940C1 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698939C1 |
| Автономное устройство для определения места повреждения кабеля | 2019 |
|
RU2730384C1 |
| CN 207096132 U, 13.03.2018 | |||
| JP 2009254632 A, 05.11.2009. | |||

