Изобретение относится к электротехнике и может быть использовано для определения мест повреждения в подводных кабельных линиях электропередачи.
Известно устройство для определения места повреждения кабеля (пат. РФ №2698939, авторы Кашин Я.М., Кириллов Г.А., Шаршак А.А.), содержащее импульсный измеритель, радиотелефон, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным относительно оси симметрии свинцового контейнера влево, прижимаемого к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационностойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом на наружной стороне свинцового контейнера закреплен блок автономного управления, содержащий аккумуляторную батарею, при этом устройство дополнительно оборудовано блоком дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо», а свинцовый контейнер выполнен с зацепами, установлен на управляемом посредством блока дистанционного управления шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата, удерживающую раму, выполненную с возможностью вертикального перемещения посредством двух домкратов и с симметрично расположенными боковыми выступами, внутри которых нарезается внутренняя резьба, свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, блок автономного управления дополнительно содержит красную сигнальную лампу и зеленую сигнальную лампу, установленные в верхней его части, и электронный блок, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, а в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию от левого края свинцового затвора до правого края вертикального проходного канала. Каждый домкрат устройства содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу домкрата.
Недостатком этого устройства является невозможность с его помощью определять место повреждения подводного кабеля.
Наиболее близким к заявляемому изобретению по технической сущности и принятым авторами за прототип является автономное устройство для определения места повреждения кабеля (пат. РФ №2730384, авторы Кашин Я.М., Кириллов Г.А., Селин А.Е.), содержащее импульсный измеритель, радиотелефон, блок дистанционного управления, оборудованный кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо», источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным влево относительно оси симметрии свинцового контейнера, при этом свинцовый затвор прижат к нижней части свинцового контейнера прижимными пружинами с шариками и имеет возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационно-стойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом свинцовый контейнер выполнен с зацепами и установлен на управляемом посредством блока дистанционного управления шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата и удерживающую раму, выполненную с симметрично расположенными боковыми выступами, внутри которых нарезана внутренняя резьба, и с возможностью вертикального перемещения посредством двух домкратов, при этом свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, а на его наружной стороне закреплен блок автономного управления, содержащий аккумуляторную батарею, красную сигнальную лампу, зеленую сигнальную лампу и электронный блок, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию от левого края свинцового затвора до правого края вертикального проходного канала, а каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом каждого домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу каждого домкрата. В нижней части несущей рамы на равном расстоянии от рулевых колес установлена рамочная антенна, ось которой перпендикулярна поверхности земли, а блок рулевого управления содержит электродвигатель, на валу которого жестко закреплена ведущая шестерня реечной передачи, при этом рулевые колеса соединены между собой рулевой рейкой, связанной со ступицами рулевых колес посредством шарниров, в центральной верхней части которой жестко закреплена зубчатая рейка реечной передачи, а в ее центральной нижней части жестко закреплен потенциометр обратной связи, при этом блок автономного управления содержит элемент выдержки времени и сравнивающий блок, имеющий первый вход, соединенный с выходом рамочной антенны, и второй вход, соединенный с движком потенциометра обратной связи, а в корпусе реечной передачи установлены правый и левый концевые выключатели.
Недостатком этого устройства также является невозможность определения с его помощью места повреждения подводного кабеля.
Задачей предлагаемого изобретения является усовершенствование устройства для определения места повреждения кабеля, позволяющее обеспечить улучшение его эксплуатационно-технических характеристик.
Технический результат заявленного изобретения - обеспечение возможности определения места повреждения подводного кабеля за счет герметизации свинцового контейнера, обеспечения возможности его погружения и дистанционного управления устройством под водой, информирования оператора о положении устройства относительно оси поврежденного подводного кабеля и места его повреждения и обозначения на поверхности водоема точки, на местной вертикали которой находится место повреждения подводного кабеля.
Технический результат достигается тем, что в автономном устройстве для определения места повреждения подводного кабеля, содержащем свинцовый контейнер, импульсный измеритель, радиотелефон, блок дистанционного управления, оборудованный кнопкой дистанционного управления «Затвор», источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным влево относительно оси симметрии свинцового контейнера, при этом свинцовый затвор прижат к нижней части свинцового контейнера прижимными пружинами с шариками и имеет возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационно-стойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом свинцовый контейнер выполнен с зацепами, посредством которых он жестко закреплен в удерживающей раме, в нижней части которой установлена рамочная антенна, ось которой перпендикулярна поверхности дна, а на наружной стороне свинцового контейнера закреплен блок автономного управления содержащий аккумуляторную батарею, и электронный блок, элемент выдержки времени и сравнивающий блок, вход которого соединен с выходом рамочной антенны, при этом на упоре со стороны свинцового затвора 6 установлен сигнальный концевой микровыключатель, в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию от левого края свинцового затвора 6 до правого края вертикального проходного канала, при этом устройство дополнительно оборудуют погружной платформой, в нижней части которой закрепляют свинцовый контейнер, в нижней части свинцовой крышки которого устанавливают поисковый эхолот, а вертикальный узконаправленный выходной канал свинцовой крышки закрывают герметизирующей вставкой из материала, пропускающего γ-излучение, при этом удерживающую раму совмещают с корпусом погружной платформы и выполняют в виде единой сварной конструкции, при этом к верхней части корпуса прикрепляют страховочные тросы, а к его нижней части прикрепляют балластные цистерны, которые подключают через установленные внутри нижней части корпуса погружной платформы продувочные клапаны к баллону со сжатым воздухом, который закрепляют в правой верхней части корпуса погружной платформы, при этом к нижнему левому краю корпуса погружной платформы прикрепляют трехосевой манипулятор, на конце стрелы которого размещают систему отметки места повреждения кабеля, состоящую из всплывающего буя и лебедки с тросом, жестко прикрепленную к клешнеобразному зацепу, при этом на левой боковой наружной части корпуса погружной платформы закрепляют манипулятор с видеокамерой, а в верхней части корпуса погружной платформы устанавливают курсовой сервопривод, к которому посредством промежуточной рамы прикрепляют сервопривод тангажа, на оси которого устанавливают водометный двигатель, при этом в нижних углах корпуса погружной платформы размещают четыре датчика положения платформы, а внутри верхней части корпуса погружной платформы устанавливают электронный блок управления положением платформы, который выполняют с возможностью подключения к электронному блоку, выполненному с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами и первым, вторым, третьим, четвертым, пятым и шестым выходами, при этом в верхней части блока дистанционного управления спереди устанавливают красную и зеленую сигнальные лампы, сзади устанавливают кнопку «Маяк», в центре устанавливают джойстик управления горизонтальным положением погружной платформы, джойстик управления вертикальным положением погружной платформы, джойстик управления положением видеокамеры и джойстик управления трехосевым манипулятором, в боковой его части устанавливают монитор, а электронный блок управления положением платформы выполнен с первым, вторым и третьим входами и первым, вторым, третьим, четвертым и пятым выходами, при этом первый вход электронного блока управления положением платформы подключают к выходу датчиков положения платформой, второй вход подключают к выходу элемента выдержки времени, а третий вход подключают к первому выходу электронного блока, первый выход электронного блока управления положением платформы подключают к обмотке управления водометным двигателем, второй выход - к обмотке управления курсовым сервоприводом, третий выход подключают к обмотке управления сервоприводом тангажа, четвертый выход подключают к обмотке управления продувочными клапанами, пятый выход подключают к первому входу электронного блока, второй вход которого подключают к выходу видеокамеры, третий вход - к выходу манипулятора видеокамеры, четвертый вход - к выходу трехосевого манипулятора, пятый вход - к выходу поискового эхолота, шестой вход подключают посредством кабеля связи к блоку дистанционного управления, седьмой вход подключают к сигнальному промежуточному микровыключателю, а восьмой вход - к сигнальному концевому микровыключателю, пятый выход подключают к радиационно-стойкой обмотке выталкивающего электромагнита, а шестой выход подключают посредством кабеля связи к монитору и блоку дистанционного управления.
Улучшение эксплуатационно-технических характеристик устройства для определения места повреждения подводного кабеля достигается обеспечением возможности использования устройства под водой за счет герметизации свинцового контейнера, обеспечения возможности его погружения и дистанционного управления устройством под водой, информирования оператора о положении устройства относительно оси поврежденного подводного кабеля и места его повреждения и обозначения на поверхности водоема точки, на местной вертикали которой находится место повреждения подводного кабеля.
Герметизация свинцового контейнера достигается тем, что вертикальный узконаправленный выходной канал свинцовой крышки закрывают герметизирующей вставкой из материала, пропускающего γ-излучение.
Возможность погружения свинцового контейнера в воду достигается тем, что устройство дополнительно оборудуют погружной платформой, в нижней части которой закрепляют свинцовый контейнер, при этом удерживающую раму совмещают с корпусом погружной платформы и выполняют в виде единой сварной конструкции, при этом к верхней части корпуса прикрепляют страховочные тросы, а к его нижней части прикрепляют балластные цистерны, которые подключают через установленные внутри нижней части корпуса погружной платформы продувочные клапаны к баллону со сжатым воздухом, который закрепляют в правой верхней части корпуса погружной платформы, а внутри верхней части корпуса погружной платформы устанавливают электронный блок управления положением платформы, который выполняют с возможностью подключения к электронному блоку, при этом электронный блок управления положением платформы выполняют с первым, вторым и третьим входами и первым, вторым, третьим, четвертым и пятым выходами, а электронный блок выполняют с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами и первым, вторым, третьим, четвертым, пятым и шестым выходами, при этом в боковой части блока дистанционного управления устанавливают монитор, в центре верхней его части устанавливают джойстик управления вертикальным положением погружной платформы.
Закрепление на левой боковой наружной части корпуса погружной платформы манипулятора с видеокамерой обеспечивает возможность второму оператору видеть положение устройства относительно оси кабеля для своевременной подачи команд управления для перемещения устройства.
Дистанционное управление устройством под водой обеспечивается совмещением продольной оси платформы с линией, параллельной оси поврежденного кабеля, удержанием положения погружной платформы в плоскости, параллельной дну водоема, в котором проложен подводный кабель, обеспечением возможности дистанционного управления перемещением погружной платформы под водой, а также дистанционного управляемого открытия свинцового затвора и установки системы отметки места повреждения кабеля, минимизацией отклонения устройства от трассы прохождения кабеля в зоне его повреждения, предотвращением включения водометного двигателя при случайных кратковременных самоустраняющихся отклонениях устройства.
Возможность совмещения продольной оси платформы с линией, параллельной оси поврежденного кабеля обеспечивается установкой в верхней части корпуса погружной платформы курсового сервопривода, к которому посредством промежуточной рамы прикреплен сервопривод тангажа, на оси которого установлен водометный двигатель.
Возможность удержания положения погружной платформы в плоскости, параллельной дну водоема, в котором проложен подводный кабель, обеспечивается размещением в нижних углах корпуса погружной платформы четырех датчиков положения платформы и установкой внутри верхней части корпуса погружной платформы электронного блока управления положением платформы, который выполняют с возможностью подключения к электронному блоку.
Обеспечение возможности дистанционного управления перемещением погружной платформы под водой, а также дистанционного управляемого открытия свинцового затвора и установки системы отметки места повреждения кабеля обеспечивается выполнением электронного блока управления положением платформы с первым, вторым и третьим входами и первым, вторым, третьим, четвертым и пятым выходами, а электронного блока с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами и первым, вторым, третьим, четвертым, пятым и шестым выходами, установкой в центре верхней части блока дистанционного управления джойстика управления горизонтальным положением погружной платформы, джойстика управления вертикальным положением погружной платформы, джойстика управления положением видеокамеры и джойстика управления трехосевым манипулятором, подключением первого входа электронного блока управления положением платформы к выходу датчиков положения платформой, второго входа - к выходу элемента выдержки времени, а третьего входа - к первому выходу электронного блока, первого выхода электронного блока управления положением платформы - к обмотке управления водометным двигателем, второго выхода - к обмотке управления курсовым сервоприводом, третьего выхода - к обмотке управления сервоприводом тангажа, четвертого выхода - к обмотке управления продувочными клапанами, пятого выхода - к первому входу электронного блока, третьего входа - к первому выходу электронного блока, второй вход которого подключают к выходу видеокамеры, третий вход - к выходу манипулятора видеокамеры, четвертый вход - к выходу трехосевого манипулятора, при этом шестой вход посредством кабеля связи подключают к блоку дистанционного управления, пятый выход - к радиационно-стойкой обмотке выталкивающего электромагнита, а шестой выход посредством кабеля связи - к монитору и блоку дистанционного управления.
Минимизация отклонения устройства от трассы прохождения кабеля в зоне его повреждения достигается подключением первого входа электронного блока управления положением платформы к выходу датчиков положения платформой, второго входа - к выходу элемента выдержки времени, и третьего входа - к первому выходу электронного блока.
Предотвращение включения водометного двигателя при случайных кратковременных самоустраняющихся отклонениях устройства от оси поврежденного кабеля достигается подключением второго входа электронного блока управления положением платформы к выходу элемента выдержки времени.
Информирование оператора о положении устройства от оси поврежденного подводного кабеля и места его повреждения достигается установкой в нижней части свинцовой крышки свинцового контейнера поискового эхолота, закреплением на левой боковой наружной части корпуса погружной платформы манипулятора с видеокамерой и установкой в верхней части блока дистанционного управления красной и зеленой сигнальных ламп, а также монитора в его боковой части, подключением первого входа электронного блока управления положением платформы к выходу датчиков положения платформой, а второго входа электронного блока - к выходу видеокамеры, третьего входа - к выходу манипулятора видеокамеры, пятого входа - к выходу поискового эхолота, седьмого входа к сигнальному промежуточному микровыключателю, восьмого входа - к сигнальному концевому микровыключателю, а шестого выхода посредством кабеля связи - к монитору.
Возможность обозначения на поверхности водоема точки, на местной вертикали которой находится место повреждения подводного кабеля достигается за счет того, что к нижнему левому краю корпуса погружной платформы прикрепляют трехосевой манипулятор, на конце стрелы которого размещают систему отметки места повреждения кабеля, состоящую из всплывающего буя и лебедки с тросом, жестко прикрепленную к клешнеобразному зацепу, четвертый вход электронного блока подключают к выходу трехосевого манипулятора, четвертый выход электронного блока подключают ко входу трехосевого манипулятора, а блок дистанционного управления дополнительно оборудуют кнопкой «Маяк».
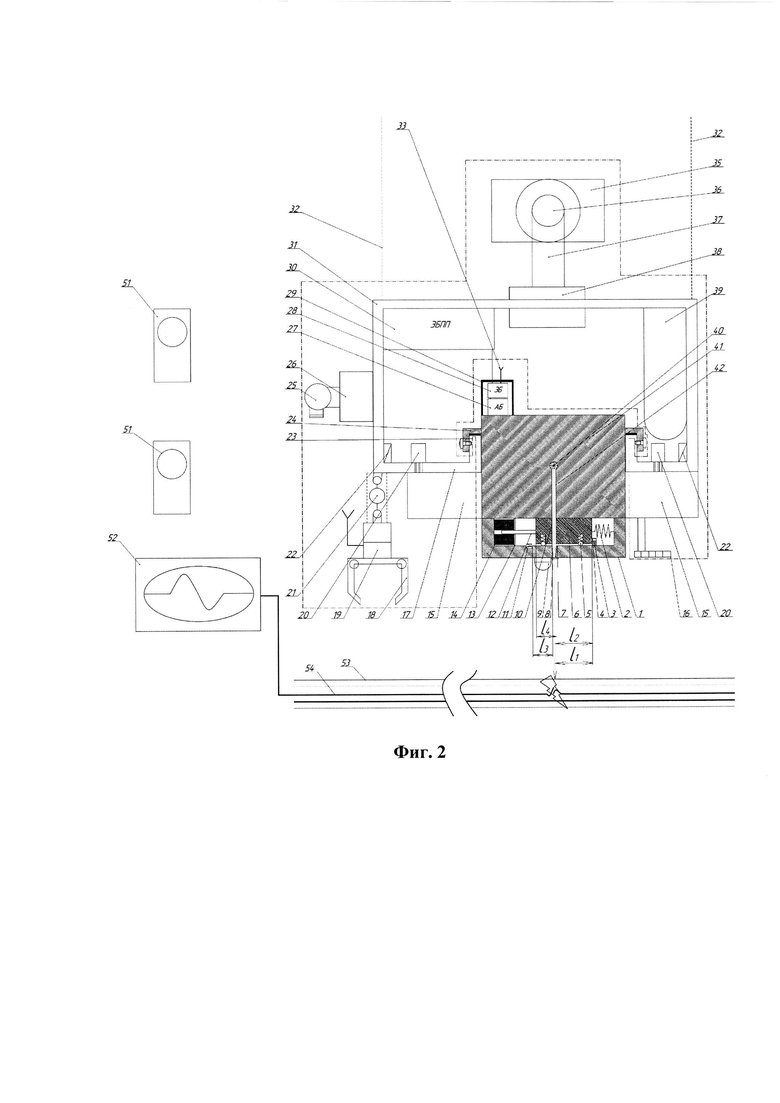
На фиг. 1 представлено предлагаемое устройство для определения места повреждения подводного кабеля с затвором, установленным в исходное положение, на фиг. 2 - предлагаемое устройство с поврежденным подводным кабелем в момент воздействия на кабель радиоактивного γ-излучения и создания в его изоляции искусственной волновой неоднородности, на фиг. 3 - блок-схема соединения электронного блока с исполнительными механизмами, органами сигнализации и управления, на фиг. 4 - схема системы отметки места повреждения подводного кабеля, на фиг. 5 - блок-схема блока дистанционного управления (вид сверху), на фиг. 6 - распределение ЭДС и изменение фазы сигнала в рамке рамочной антенны, на фиг. 7 - график изменения ЭДС, наводимой в рамочной антенне (16 а - рамочная антенна находится на оси трассы поврежденного подводного кабеля, 16 б - слева от нее, 16 в - справа от нее).
Устройство для определения места повреждения подводного кабеля, содержит (фиг. 1, 2): свинцовый контейнер 41, закрепленный в нижней части погружной платформы 17, импульсный измеритель 52, радиотелефон 51, блок дистанционного управления 47 (фиг. 5), оборудованный кнопками дистанционного управления «Затвор» и «Маяк», источник радиоактивного излучения 40, установленный в центре свинцового контейнера 41 в расположенном по его оси симметрии вертикальном канале 42.
В нижней части свинцового контейнера 41 установлен затворный механизм, состоящий из свинцовой крышки 1, по центру которой выполнен вертикальный узконаправленный выходной канал 7, расположенный на одной оси с вертикальным каналом 42 свинцового контейнера 41, и установленного внутри свинцовой крышки свинцового затвора 6 с вертикальным проходным каналом 10, смещенным влево относительно оси симметрии свинцового контейнера 41. Свинцовый затвор 6 прижат к нижней части свинцового контейнера 41 прижимными пружинами с шариками 5 и имеет возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора 10 с вертикальным каналом 42 свинцового контейнера 41 и вертикальным узконаправленным выходным каналом 7 свинцовой крышки 1 по оси симметрии свинцового контейнера 41. Свинцовый затвор 6 своей правой торцевой частью упруго связан со свинцовой крышкой 1 распорной пружиной 2. К левой внутренней стороне свинцовой крышки 1 жестко прикреплен выталкивающий электромагнит 13, состоящий из радиационно-стойкой обмотки 14 и стального стержня-якоря 12, жестко прикрепленного к левой стороне свинцового затвора 6. В нижней правой части свинцовой крышки 1 установлен упор 3, расстояние  от которого до оси симметрии вертикального канала 42 свинцового контейнера 41 выполнено равным расстоянию
от которого до оси симметрии вертикального канала 42 свинцового контейнера 41 выполнено равным расстоянию  от оси симметрии вертикального проходного канала 10 до правого края свинцового затвора 6. Свинцовый контейнер 41 выполнен с зацепами 24, посредством которых он жестко закреплен в удерживающей раме 23, совмещенной с корпусом 31 погружной платформы 17 и выполненной в виде единой сварной конструкции. В нижней части удерживающей рамы 23 установлена рамочная антенна 16, ось которой перпендикулярна поверхности дна.
от оси симметрии вертикального проходного канала 10 до правого края свинцового затвора 6. Свинцовый контейнер 41 выполнен с зацепами 24, посредством которых он жестко закреплен в удерживающей раме 23, совмещенной с корпусом 31 погружной платформы 17 и выполненной в виде единой сварной конструкции. В нижней части удерживающей рамы 23 установлена рамочная антенна 16, ось которой перпендикулярна поверхности дна.
На наружной стороне свинцового контейнера 41 закреплен блок автономного управления 29, содержащий аккумуляторную батарею 27, электронный блок 28, элемент выдержки времени 55 и сравнивающий блок 56 (фиг. 3), вход которого соединен с выходом рамочной антенны 16.
На упоре 3 со стороны свинцового затвора 6 установлен сигнальный концевой микровыключатель 4. В нижней внутренней части свинцовой крышки 1 слева от вертикального узконаправленного выходного канала 7 свинцовой крышки 1 установлен сигнальный промежуточный микровыключатель 11, расстояние  от правого края которого до левого края вертикального канала 42 свинцового контейнера выполнено равным расстоянию
от правого края которого до левого края вертикального канала 42 свинцового контейнера выполнено равным расстоянию  от левого края свинцового затвора 6 до правого края вертикального проходного канала 10.
от левого края свинцового затвора 6 до правого края вертикального проходного канала 10.
В нижней части свинцовой крышки 1 свинцового контейнера 41 установлен поисковый эхолот 9 (фиг. 1, 2). Вертикальный узконаправленный выходной канал 7 свинцовой крышки 1 закрыт герметизирующей вставкой 8 из материала, пропускающего γ-излучение.
К верхней части корпуса 31 прикреплены страховочные тросы 32, а к его нижней части прикреплены балластные цистерны 15, подключенные через установленные внутри нижней части корпуса 31 погружной платформы 17 продувочные клапаны 20 к баллону 39 со сжатым воздухом, закрепленному в правой верхней части корпуса 31 погружной платформы 17.
К нижнему левому краю корпуса 31 прикреплен трехосевой манипулятор 21 (фиг. 1, 2, 4), на конце стрелы 60 которого размещена система отметки места повреждения 19 кабеля, состоящая из всплывающего буя 59 и лебедки 57 с тросом 58, жестко прикрепленная к клешнеобразному зацепу 18.
На левой боковой наружной части корпуса 31 закреплен манипулятор 26 (фиг. 1, 2) с видеокамерой 25. В верхней части корпуса 31 установлен курсовой сервопривод 38, к которому посредством промежуточной рамы 37 прикреплен сервопривод тангажа 36, на оси которого установлен водометный двигатель 35.
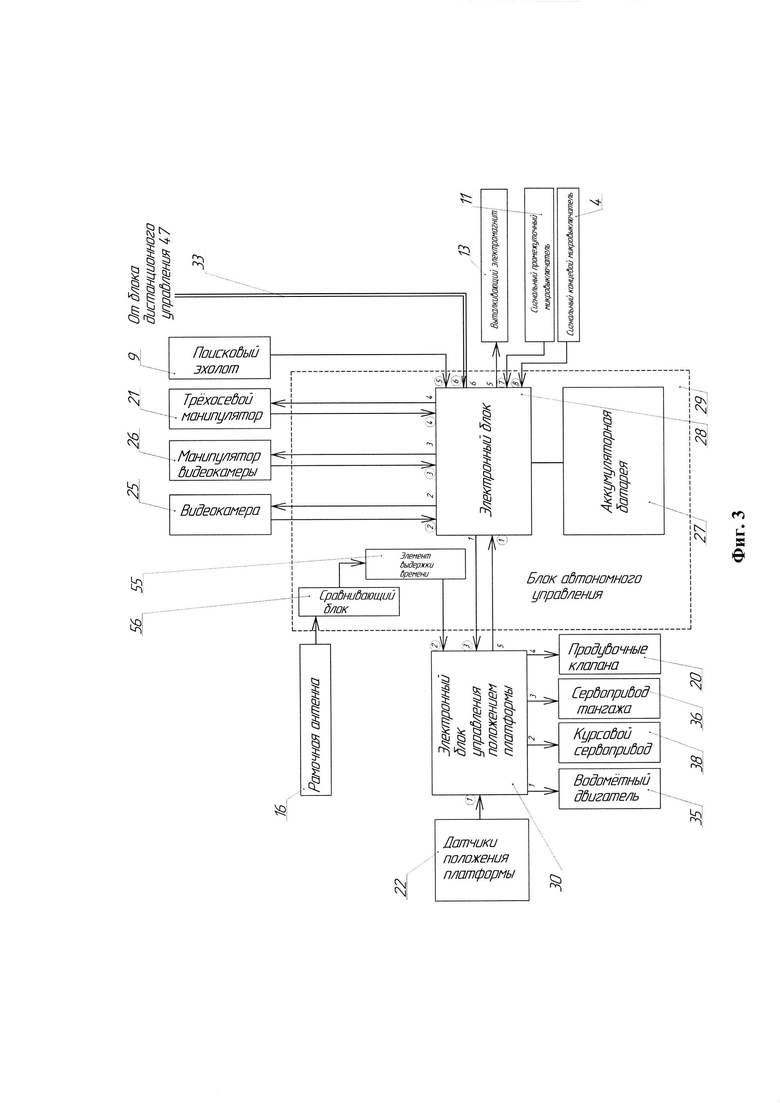
В нижних углах корпуса 31 погружной платформы 17 размещены четыре датчика положения платформы 22, а внутри его верхней части установлен электронный блок управления положением платформы 30, выполненный с возможностью подключения к электронному блоку 28, выполненному с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами и первым, вторым, третьим, четвертым, пятым и шестым выходами.
В верхней части блока дистанционного управления 47 спереди установлены красная 49 и зеленая 48 сигнальные лампы (фиг.5), сзади установлены кнопки «Затвор» и «Маяк». В центре верхней части блока дистанционного управления 47 установлены джойстик управления горизонтальным положением погружной платформы 45, джойстик управления вертикальным положением погружной платформы 46, джойстик 43 управления положением видеокамеры 25 и джойстик 44 управления трехосевым манипулятором 21. В боковой части блока дистанционного управления 47 справа установлен монитор 50 (фиг. 5).
Электронный блок управления положением платформы 30 выполнен с первым, вторым и третьим входами и первым, вторым, третьим, четвертым и пятым выходами (фиг. 3). Электронный блок 28 выполнен с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами и первым, вторым, третьим, четвертым, пятым и шестым выходами.
Первый вход электронного блока управления положением платформы 30 подключен к выходу датчиков положения платформой 22, второй его вход подключен к выходу элемента выдержки времени 55, а третий вход подключен к первому выходу электронного блока 28 (фиг. 3). Первый выход электронного блока управления положением платформы 30 подключен к обмотке управления водометным двигателем 35, второй выход - к обмотке управления курсовым сервоприводом 38, третий выход - к обмотке управления сервоприводом тангажа 36, четвертый выход - к обмотке управления продувочными клапанами 20, пятый выход - к первому входу электронного блока 28, второй вход которого подключен к выходу видеокамеры 25, третий вход - к выходу манипулятора видеокамеры 26, четвертый вход - к выходу трехосевого манипулятора 21, пятый вход - к выходу поискового эхолота 9, шестой вход подключен посредством кабеля связи 33 к блоку дистанционного управления 47, седьмой вход подключен к сигнальному промежуточному микровыключателю 11, а восьмой вход - к сигнальному концевому микровыключателю 4. Пятый выход электронного блока 28 подключен к радиаци-онностойкой обмотке 14 выталкивающего электромагнита 13, а шестой выход подключен посредством кабеля связи 33 к монитору 50 и блоку дистанционного управления 47.
Устройство работает следующим образом.
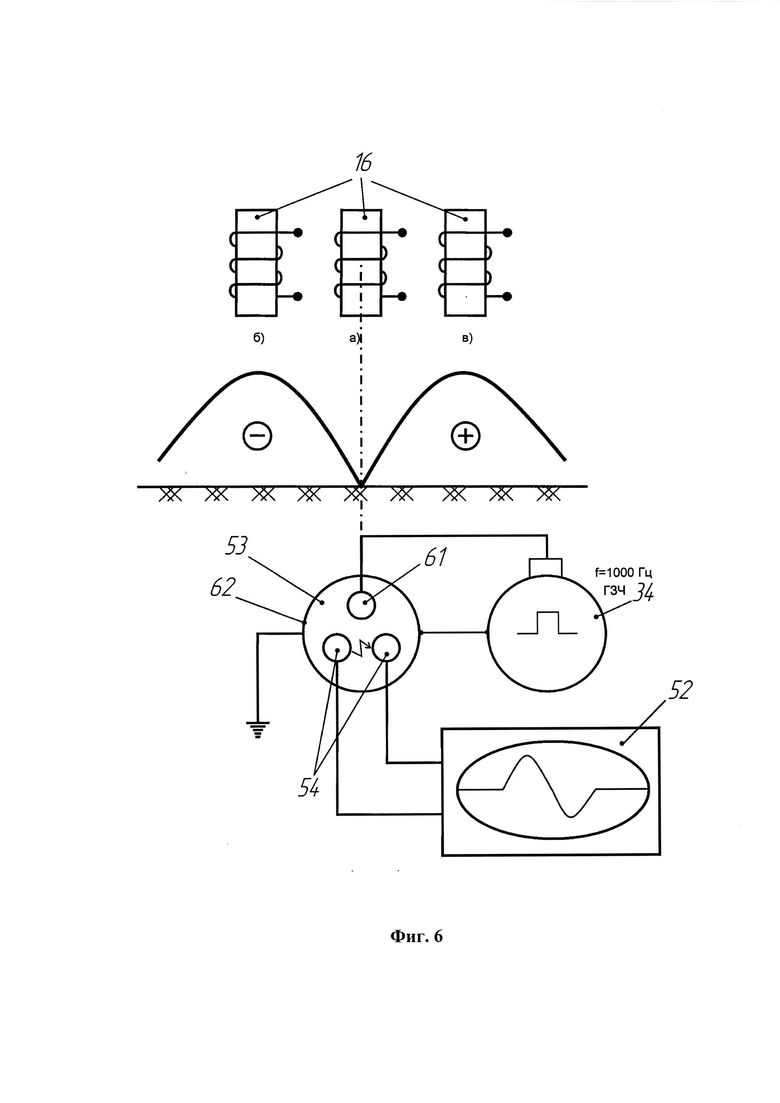
Первый оператор, находящийся на одном конце поврежденного кабеля, посредством мегомметра известным способом определяет исправные 61 и неисправные 54 жилы поврежденного кабеля 53 (фиг. 2, 6). Третий оператор, находясь на другом конце поврежденного кабеля 53, отсоединяет все жилы поврежденного кабеля 53 от шин распределительного устройства подстанции (на фиг. 2 не показаны, как не имеющие отношения к существу изобретения), а исправную жилу 61 (фиг.6) поврежденного кабеля 53 подсоединяет к заземленной оболочке 62 поврежденного кабеля 53.
Затем первый оператор подключает к неисправным жилам 54 поврежденного кабеля 53 импульсный измеритель 52 (фиг. 2, 6) и определяет зону повреждения кабеля 53 на трассе. Затем он подключает к исправной жиле 61 и заземленной оболочке 62 поврежденного кабеля 53 генератор звуковой частоты (ГЗЧ) 34 (фиг. 6), генерирующий импульсы напряжения положительной полярности. В результате этого от генератора звуковой частоты 34 по исправной жиле 61 поврежденного кабеля 53 протекает ток звуковой частоты, который возвращается к генератору звуковой частоты 34 через заземленную оболочку 62 поврежденного кабеля 53, частично растекаясь в воде и в грунте дна через многочисленные контакты заземленной оболочки 62 поврежденного кабеля 53 с водой и грунтом дна, образуя одиночный ток исправной жилы 61.
Второй оператор с устройством для определения места повреждения подводного кабеля, находящийся на плавсредстве (например, на катере), по команде первого оператора направляется в зону повреждения кабеля 53. По прибытии в зону повреждения подводного кабеля 53 второй оператор подсоединяет погружную платформу 17 посредством страховочных тросов 32 к спуско-подъемному механизму, через кабель связи 33 подключает электронный блок 28 блока автономного управления 29 к блоку дистанционного управления 47. При этом напряжение от аккумуляторной батареи 27 через замкнутые контакты сигнального промежуточного микровыключателя 11 подается на зеленую сигнальную лампу 48 (фиг. 5), которая загорается, информируя второго оператора о том, что вертикальные каналы 42, 10 и 7 не совмещены. Затем второй оператор посредством спуско-подъемного механизма (на фиг. 1, 2 не показан как не имеющий отношения к существу изобретения) с помощью страховочных тросов 32 опускает погружную платформу 17 в воду в предполагаемой зоне повреждения кабеля. Второй оператор при этом нажимает на джойстик 46 управления вертикальным положением погружной платформы 17 на блоке дистанционного управления 47 (фиг. 5). В результате этого с блока дистанционного управления 47 управляющий сигнал по кабелю связи 33 поступает на шестой вход электронного блока 28 (фиг. 3). Электронный блок 28 блока автономного управления 29 формирует командный сигнал и со своего первого выхода подает этот сигнал на третий вход электронного блока управления положением платформы 30. По этому сигналу электронный блок управления положением платформы 30 со своего четвертого выхода подает напряжение от аккумуляторной батареи 27 к обмоткам управления (на фиг. 1-3 не показаны как не имеющие отношения к существу изобретения) продувочными клапанами 20, переводя продувочные клапаны 20 в положение забора воды. В результате этого вода через продувочные клапаны 20 заполняет балластные цистерны 15, вследствие чего происходит погружение погружной платформы 17. При приближении погружной платформы 17 ко дну поисковый эхолот 9 подает сигнал на пятый вход электронного блока 28 (фиг. 3), который со своего первого выхода подает на третий вход электронного блока управления положением платформы 30 электрический сигнал. По этому сигналу электронный блок управления положением платформы 30 через свой четвертый выход подключает напряжение аккумуляторной батареи 27 к продувочным клапанам 20, переводя их в положение частичного закачивания воздуха из баллона 39 со сжатым воздухом в балластные цистерны 15, обеспечивая зависание погружной платформы 17 на необходимом расстоянии от поверхности дна, заранее установленном вторым оператором в зависимости от типа поврежденного кабеля 53. При зависании погружной платформы 17 электронный блок 28 со своего шестого выхода по кабелю связи 33 подает сигнал на блок дистанционного управления 47. Блок дистанционного управления 47 включает зеленую сигнальную лампу 48 в режим мигания (фиг.5). При начале мигания зеленой сигнальной лампы 48 второй оператор отпускает джойстик управления вертикальным положением погружной платформы 46 и останавливает спуск на спуско-подъемном механизме, затем нажимает на джойстик управления горизонтальным положением погружной платформы 45 на блоке дистанционного управления 47. В результате этого с выхода блока дистанционного управления 47 управляющий сигнал через кабель связи 33 поступает на шестой вход электронного блока 28 (фиг.3), который формирует управляющий сигнал перемещения и со своего первого выхода подает этот сигнал на третий вход электронного блока управления положением платформы 30, который подключает напряжение аккумуляторной батареи 27 к обмотке управления курсовым сервоприводом 38. Курсовой сервопривод 38 поворачивает промежуточную раму 37 с закрепленным на ней сервоприводом тангажа 36 и водометным двигателем 35 на заданный вторым оператором посредством джойстика управления горизонтальным положением погружной платформы 45 угол, обеспечивающий совмещение продольной оси платформы с линией, параллельной оси поврежденного кабеля 53. Значение этого угла вместе с положением погружной платформы 17 относительно поверхности дна отображается на мониторе 50. После этого электронный блок управления положением платформы 30 со своего первого выхода подает напряжение на обмотку управления (на фиг. 1-4 не показана, как не имеющая отношения к существу изобретения) водометным двигателем 35, который обеспечивает перемещение погружной платформы 17 в горизонтальной плоскости в заданном вторым оператором направлении.
Одновременно второй оператор управляет положением видеокамеры 25 посредством джойстика управления положением видеокамеры 43 на блоке дистанционного управления 47 (фиг. 5). Сигнал управления положением видеокамеры 25, сформированный вторым оператором посредством джойстика 43 управления положением видеокамеры 25, через кабель связи 33 поступает на шестой вход электронного блока 28 (фиг.3) и через его третий выход поступает на вход манипулятора 26 видеокамеры 25, который устанавливает видеокамеру 25 в заданное вторым оператором положение.
Видеосигнал с выхода видеокамеры 25 поступает на второй вход электронного блока 28, а на его пятый вход поступает сигнал о рельефе дна и расстоянии до поврежденного кабеля с выхода поискового эхолота 9. С шестого выхода электронного блока 28 преобразованный с учетом информации с поискового эхолота 9 видеосигнал по кабелю связи 33 поступает на монитор 50.
С помощью изображения, выведенного на монитор 50, второй оператор определяет точное расположение оси поврежденного кабеля 53 на трассе.
После этого второй оператор с помощью джойстика управления горизонтальным положением погружной платформы 45 корректирует положение погружной платформы 17 по направлению оси кабеля.
Затем второй оператор, нажав кнопку «Затвор» на блоке дистанционного управления 47, подает сигнал на электронный блок 28 на открытие свинцового затвора 6. При этом напряжение от аккумуляторной батареи 27 подается на радиационно-стойкую обмотку 14 выталкивающего электромагнита 13. В результате этого под действием напряжения аккумуляторной батареи 27 по радиационно-стойкой обмотке 14 протекает электрический ток, который создает магнитный поток, выталкивающий стальной стержень-якорь 12 выталкивающего электромагнита 13, жестко прикрепленный к левой стороне свинцового затвора 6 (фиг. 1), вправо. В результате этого свинцовый затвор 6, прижатый прижимными пружинами с шариками 5 к нижней части свинцового контейнера 41, выполненного с зацепами 24, смещается по горизонтали вправо до упора 3 (фиг. 2), расстояние  от которого до оси симметрии вертикального канала 42 свинцового контейнера 41 равно расстоянию
от которого до оси симметрии вертикального канала 42 свинцового контейнера 41 равно расстоянию  от оси симметрии вертикального проходного канала 10 до правого края свинцового затвора 6. При этом распорная пружина 2 сжимается, а по оси симметрии свинцового контейнера 41 полностью совмещаются все три канала: вертикальный канал 42 свинцового контейнера 41, вертикальный проходной канал 10 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. Одновременно сигнальный концевой микровыключатель 4 замыкается и подключает красную сигнальную лампу 49 (фиг. 5), установленную в верхней части блока дистанционного управления 47, к аккумуляторной батарее 27. Под действием напряжения аккумуляторной батареи 27 электрический ток протекает через красную сигнальную лампу 49, которая загорается, информируя второго оператора о том, что полностью совмещены все три канала: вертикальный канал 42 свинцового контейнера 41, вертикальный проходной канал 10 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. При этом контакты сигнального промежуточного микровыключателя 11 (фиг. 1-3) размыкаются, разрывая цепь питания зеленой сигнальной лампы 48, которая гаснет. Радиоактивное γ-излучение от источника радиоактивного излучения 40 через полностью совмещенные каналы и герметизирующую вставку 8 свободно проходит во внешнюю среду, воздействуя на поврежденный кабель 53 (фиг. 2), вызывая в его изоляции обратимые изменения типа сконцентрированной искусственной волновой неоднородности, от которой отражается зондирующий сигнал, фиксируемый визуально на экране импульсного измерителя 52 первым оператором и автоматически записываемый в память импульсного измерителя 52. Первый оператор производит анализ полученных результатов измерений и при несовпадении сигнала, отраженного от места повреждения, с сигналом, отраженным от искусственно созданной волновой неоднородности, на экране импульсного измерителя 52, по радиотелефону 51 дает команду второму оператору на перемещение погружной платформы 17 по трассе в ту или иную сторону. По этой команде второй оператор отпускает кнопку «Затвор» на блоке дистанционного управления 47. В результате этого с блока дистанционного управления 47 на электронный блок 28 подается сигнал, по которому электронный блок 28 отключает радиационно-стойкую обмотку 14 выталкивающего электромагнита 13 от аккумуляторной батареи 27, электрический ток по радиационно-стойкой обмотке 14 не протекает, магнитный поток исчезает, свинцовый затвор 6 под действием распорной пружины 2 перемещается влево в свое первоначальное положение (фиг. 1). При этом сигнальный концевой микровыключатель 4 размыкается, красная сигнальная лампа 49 гаснет, сигнальный промежуточный микровыключатель 11 замыкается, зеленая сигнальная лампа 48 загорается.
от оси симметрии вертикального проходного канала 10 до правого края свинцового затвора 6. При этом распорная пружина 2 сжимается, а по оси симметрии свинцового контейнера 41 полностью совмещаются все три канала: вертикальный канал 42 свинцового контейнера 41, вертикальный проходной канал 10 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. Одновременно сигнальный концевой микровыключатель 4 замыкается и подключает красную сигнальную лампу 49 (фиг. 5), установленную в верхней части блока дистанционного управления 47, к аккумуляторной батарее 27. Под действием напряжения аккумуляторной батареи 27 электрический ток протекает через красную сигнальную лампу 49, которая загорается, информируя второго оператора о том, что полностью совмещены все три канала: вертикальный канал 42 свинцового контейнера 41, вертикальный проходной канал 10 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. При этом контакты сигнального промежуточного микровыключателя 11 (фиг. 1-3) размыкаются, разрывая цепь питания зеленой сигнальной лампы 48, которая гаснет. Радиоактивное γ-излучение от источника радиоактивного излучения 40 через полностью совмещенные каналы и герметизирующую вставку 8 свободно проходит во внешнюю среду, воздействуя на поврежденный кабель 53 (фиг. 2), вызывая в его изоляции обратимые изменения типа сконцентрированной искусственной волновой неоднородности, от которой отражается зондирующий сигнал, фиксируемый визуально на экране импульсного измерителя 52 первым оператором и автоматически записываемый в память импульсного измерителя 52. Первый оператор производит анализ полученных результатов измерений и при несовпадении сигнала, отраженного от места повреждения, с сигналом, отраженным от искусственно созданной волновой неоднородности, на экране импульсного измерителя 52, по радиотелефону 51 дает команду второму оператору на перемещение погружной платформы 17 по трассе в ту или иную сторону. По этой команде второй оператор отпускает кнопку «Затвор» на блоке дистанционного управления 47. В результате этого с блока дистанционного управления 47 на электронный блок 28 подается сигнал, по которому электронный блок 28 отключает радиационно-стойкую обмотку 14 выталкивающего электромагнита 13 от аккумуляторной батареи 27, электрический ток по радиационно-стойкой обмотке 14 не протекает, магнитный поток исчезает, свинцовый затвор 6 под действием распорной пружины 2 перемещается влево в свое первоначальное положение (фиг. 1). При этом сигнальный концевой микровыключатель 4 размыкается, красная сигнальная лампа 49 гаснет, сигнальный промежуточный микровыключатель 11 замыкается, зеленая сигнальная лампа 48 загорается.
После этого второй оператор в зависимости от того, в какую сторону и насколько необходимо переместить устройство для определения места повреждения подводного кабеля, джойстиком 45 управления горизонтальным положением погружной платформы 17 и джойстиком 46 управления вертикальным положением погружной платформы 17 с блока дистанционного управления 47 подает сигнал через кабель связи 33 на шестой вход электронного блока 28 (фиг. 3, 5).
Сигнал на электронный блок 28 поступает до тех пор, пока второй оператор удерживает джойстики управления 45 горизонтальным положением и 46 вертикальным положением погружной платформы 17 в соответствующем положении.
Далее управление устройством осуществляется вторым оператором, как описано выше.
При необходимости увеличения расстояния между погружной платформой 17 и поверхностью дна, например, для преодоления неровностей дна, второй оператор нажимает на джойстик управления вертикальным положением погружной платформы 46, в результате чего с блока дистанционного управления 47 управляющий сигнал на всплытие поступает через кабель связи 33 на шестой вход электронного блока 28, который формирует управляющий сигнал и со своего первого выхода подает этот сигнал на третий вход электронного блока управления положением платформы 30, который обеспечивает подачу со своего третьего выхода напряжения от аккумуляторной батареи 27 к сервоприводу тангажа 36. Сервопривод тангажа 36 поворачивает водометный двигатель 35 вокруг поперечной оси промежуточной рамы 37 на заданный угол. Одновременно электронный блок управления положением платформы 30 со своего четвертого выхода подает напряжение аккумуляторной батареи 27 к обмоткам управления (на фиг. 1, 2, 3 не показаны, как не имеющие отношения к существу изобретения) продувочными клапанами 20, переводя продувочные клапаны 20 в положение забора воздуха из баллона 39. Вода, вытесняемая сжатым воздухом, через продувочные клапаны 20 выходит наружу, а балластные цистерны 15 частично заполняются воздухом из баллона 39. В результате этого погружная платформа 17 начинает всплывать, двигаясь в вертикальном направлении. Расстояние от погружной платформы до дна контролируется видеокамерой 25 и поисковым эхолотом 9.
При необходимости уменьшения расстояния между погружной платформой 17 и поверхностью дна второй оператор нажимает на джойстик управления вертикальным положением погружной платформы 46, в результате чего с блока дистанционного управления 47 управляющий сигнал на погружение через кабель связи 33 поступает на шестой вход электронного блока 28, который формирует управляющий сигнал и со своего первого выхода подает этот сигнал на третий вход электронного блока управления положением платформы 30, который со своего четвертого выхода подключает напряжение аккумуляторной батареи 27 к обмоткам управления (на фиг. 1, 2, 3 не показаны, как не имеющие отношения к существу изобретения) продувочными клапанами 20, переводя их в положение забора воды. В результате этого вода через продувочные клапаны 20 заполняет балластные цистерны 15, вследствие чего происходит погружение погружной платформы 17. При приближении погружной платформы 17 ко дну поисковый эхолот 9 подает сигнал на пятый вход электронного блока 28, в результате чего погружение прекращается, и платформа зависает на заданной глубине по алгоритму, описанному выше.
При одновременном нажатии вниз на джойстик управления горизонтальным положением погружной платформы 45 и джойстик управления вертикальным положением погружной платформы 46 и наличии на выходе рамочной антенны 16 сигнала отклонения продольной оси погружной платформы 17 от направления оси поврежденного подводного кабеля устройство автоматически устанавливается вдоль оси поврежденного подводного кабеля следующим образом.
Одиночный ток исправной жилы 61 поврежденного кабеля 53 создает вокруг нее магнитное поле (фиг. 6), силовые линии которого пересекают витки рамочной антенны 16 (фиг. 6, поз.16б и 16в). Вследствие этого в витках рамочной антенны 16 наводится ЭДС, величина и полярность которой зависят от направления отклонения и расстояния от рамочной антенны 16 до оси поврежденного кабеля 53. При этом при перемещении рамочной антенны 16 влево фаза ЭДС отрицательна (фиг. 7, поз.16б, кривая 1), а при перемещении вправо - положительна (фиг. 7, поз.16в, кривая 2),
Если предлагаемое автономное устройство перемещается вдоль оси поврежденного кабеля 53 (рамочная антенна 16 находится точно над осью поврежденного кабеля 53 (фиг. 6, поз.16а, фиг. 7, поз.16а), то силовые линии магнитного поля, созданного одиночным током, протекающим в исправной жиле 61 поврежденного кабеля 53, скользят вдоль плоскости витков рамочной антенны 16, наводя в ней минимальную (практически равную нулю) ЭДС, поэтому напряжение на выходе рамочной антенны 16, находящейся точно над осью поврежденного кабеля 53, равно нулю.
Если предлагаемое автономное устройство отклоняется от оси поврежденного кабеля 53 вправо (фиг. 6 поз.16в, фиг. 7 поз.16в) или влево (фиг. 6 поз.16б, фиг. 7 поз 16б), то ЭДС, наводимая в рамочной антенне 16, увеличивается, так как силовые линии магнитного поля пересекают плоскость витков рамочной антенны 16 под постепенно увеличивающимся углом в зависимости от расстояния от предлагаемого автономного устройства и, следовательно, рамочной антенны 16, до оси поврежденного кабеля 53. Увеличение ЭДС будет происходить до определенного значения, а затем значение ЭДС уменьшается, так как воздействие магнитного поля ослабевает пропорционально квадрату расстояния от рамочной антенны 16 до оси поврежденного кабеля 53.
При отклонении предлагаемого автономного устройства с рамочной антенной 16 вправо по ходу движения в рамочной антенне 16 будет наводиться ЭДС положительной полярности (фиг. 7, кривая 2), а при отклонении влево - отрицательной полярности (фиг. 7, кривая 1).
Выходное напряжение рамочной антенны 16 соответствующей полярности поступает на вход сравнивающего блока 56 (фиг. 3), с выхода которого напряжение подается на вход элемента выдержки времени 55, с выхода которого сигнал поступает на второй вход электронного блока управления положением платформы 30. Электронный блок управления положением платформы 30 через свой второй выход подает напряжение от аккумуляторной батареи 27 на курсовой сервопривод 38. Курсовой сервопривод 38 поворачивает промежуточную раму 37 с закрепленным на ней сервоприводом тангажа 36 и водометным двигателем 35 на заданный электронным блоком управления положением платформы 30 угол. После этого электронный блок управления положением платформы 30 со своего первого выхода подает напряжение на обмотку управления водометного двигателя 35, который обеспечивает перемещение погружной платформы 17 в горизонтальной плоскости в заданном электронным блоком управления положением платформы 30 направлении. В результате этого погружная платформа 17 перемещается в соответствующую сторону на необходимое расстояние.
При неровностях дна или преграде сигнал с выхода поискового эхолота 9 поступает на пятый вход электронного блока 28. Электронный блок 28 формирует импульсное напряжение и подает его на красную сигнальную лампу 49, включая ее в режим мигания. Мигание красной сигнальной лампы 49 информирует второго оператора о необходимости взять управление погружной платформой 17 на себя. Одновременно электронный блок 28 со своего первого выхода подает сигнал на третий вход электронного блока управления положением платформы 30 на отключение питания водометного двигателя 35. Электронный блок управления положением платформы 30 через свой первый выход снимает напряжение питания с обмотки управления водометного двигателя 35.
При отклонении положения погружной платформы 17 от плоскости, параллельной дну водоема, в котором проложен подводный кабель, импульсные сигналы с выхода размещенных на углах удерживающей рамы 23, совмещенной с корпусом 31 погружной платформы 17, датчиков положения 22 погружной платформы 17 поступают на первый вход электронного блока управления положением платформы 30, который через свой четвертый выход подключает напряжение к обмоткам управления продувочными клапанами 20, подающими сжатый воздух из баллона 39 в балластные цистерны 15, вытесняя из них воду. В результате этого часть балластных цистерн 15 становится легче или тяжелее, перемещая соответствующий край погружной платформы 17 вверх или вниз, стабилизируя ее положение относительно поверхности дна водоема.
Перемещение устройства, управляемого вторым оператором по команде первого оператора, вдоль трассы поврежденного кабеля 53 продолжается до тех пор, пока сигнал, отраженный от места повреждения кабеля 53, не совпадет с сигналом, отраженным от искусственно созданной волновой неоднородности. Место положения устройства, на котором произошло совпадение отраженных сигналов, есть место повреждения подводного кабеля.
При совпадении сигнала, отраженного от места повреждения, с сигналом, отраженным от искусственно созданной волновой неоднородности, первый оператор подает второму оператору команду «Стоп», которую второй оператор принимает по радиотелефону 51. Затем второй оператор нажимает на джойстик управления 44 (фиг. 5) трехосевым манипулятором 21 (фиг. 4). В результате этого блок дистанционного управления 47 по кабелю связи 33 подает сигнал на шестой вход электронного блока 28 (фиг. 3). Электронный блок 28 формирует управляющее напряжение и со своего четвертого выхода подает его на вход трехосевого манипулятора 21. Трехосевой манипулятор 21 устанавливает систему отметки места повреждения 19 кабеля надавливанием клешнеобразного зацепа 18 на поверхность поврежденного кабеля 53. В результате этого клешнеобразный зацеп 18 при касании поверхности кабеля раздвигается и затем защелкивается, обхватывая поврежденный кабель 53. После этого второй оператор нажимает кнопку «Маяк» на блоке дистанционного управления 47, и система отметки места повреждения 19 отделяется от стрелы 60 трехосевого манипулятора 21, всплывающий буй 59 всплывает на поверхность, разматывая трос 58 с лебедки 57.
Таким образом, совокупность предлагаемых признаков позволяет улучшить эксплуатационные характеристики предлагаемого устройства для определения места повреждения подводного кабеля за счет герметизации свинцового контейнера, обеспечения возможности его погружения и управляемого дистанционного перемещения под водой, дистанционного управления затвором, информирования оператора о положении устройства относительно оси поврежденного подводного кабеля и места его повреждения и обозначения на поверхности водоема точки, на местной вертикали которой находится место повреждения подводного кабеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономное устройство для определения места повреждения кабеля | 2021 |
|
RU2777879C1 |
| Автономное устройство для определения места повреждения кабеля | 2019 |
|
RU2730384C1 |
| Устройство для определения места повреждения кабеля | 2019 |
|
RU2725168C1 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698940C1 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698939C1 |
| Устройство для определения места повреждения кабеля | 2017 |
|
RU2650081C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ | 2015 |
|
RU2585323C1 |
| Устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2019 |
|
RU2728888C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО СБОРА ТОМАТОВ | 2022 |
|
RU2796270C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ ДНА АКВАТОРИИ | 2020 |
|
RU2733565C1 |



Изобретение относится к электротехнике и может быть использовано для определения мест повреждения в подводных кабельных линиях электропередачи. Технический результат: обеспечение возможности определения места повреждения подводного кабеля. Сущность: устройство для определения места повреждения подводного кабеля содержит свинцовый контейнер, импульсный измеритель, радиотелефон, блок дистанционного управления, оборудованный кнопкой дистанционного управления «Затвор», источник радиоактивного излучения, установленный в свинцовом контейнера, затворный механизм. Свинцовый контейнер закреплен в удерживающей раме, в нижней части которой установлена рамочная антенна, ось которой перпендикулярна поверхности дна. На наружной стороне свинцового контейнера закреплен блок автономного управления. Устройство оборудовано погружной платформой, в нижней части которой закреплен свинцовый контейнер. В нижней части свинцовой крышки контейнера установлен поисковый эхолот. Удерживающая рама совмещена с корпусом погружной платформы и выполнена в виде единой сварной конструкции. К нижнему левому краю корпуса погружной платформы прикреплен трехосевой манипулятор, на конце стрелы которого размещена система отметки места повреждения кабеля, состоящая из всплывающего буя и лебедки с тросом. На левой боковой наружной части корпуса погружной платформы закреплен манипулятор с видеокамерой, а в верхней части корпуса погружной платформы установлен курсовой сервопривод, к которому посредством промежуточной рамы прикреплен сервопривод тангажа, на оси которого установлен водометный двигатель. В нижних углах корпуса погружной платформы размещены четыре датчика положения платформы, а внутри верхней части корпуса погружной платформы установлен электронный блок управления положением платформы. Устройство снабжено также джойстиками управления положением платформы и трехосевым манипулятором. 7 ил.
Устройство для определения места повреждения подводного кабеля, содержащее свинцовый контейнер, импульсный измеритель, радиотелефон, блок дистанционного управления, оборудованный кнопкой дистанционного управления «Затвор», источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным влево относительно оси симметрии свинцового контейнера, при этом свинцовый затвор прижат к нижней части свинцового контейнера прижимными пружинами с шариками и имеет возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационно стойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом свинцовый контейнер выполнен с зацепами, посредством которых он жестко закреплен в удерживающей раме, в нижней части которой установлена рамочная антенна, ось которой перпендикулярна поверхности дна, а на наружной стороне свинцового контейнера закреплен блок автономного управления, содержащий аккумуляторную батарею, электронный блок, элемент выдержки времени и сравнивающий блок, вход которого соединен с выходом рамочной антенны, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию от левого края свинцового затвора до правого края вертикального проходного канала, отличающееся тем, что устройство дополнительно оборудовано погружной платформой, в нижней части которой закреплен свинцовый контейнер, в нижней части свинцовой крышки которого установлен поисковый эхолот, а вертикальный узконаправленный выходной канал свинцовой крышки закрыт герметизирующей вставкой из материала, пропускающего γ-излучение, при этом удерживающая рама совмещена с корпусом погружной платформы и выполнена в виде единой сварной конструкции, при этом к верхней части корпуса прикреплены страховочные тросы, а к его нижней части прикреплены балластные цистерны, подключенные через установленные внутри нижней части корпуса погружной платформы продувочные клапаны к баллону со сжатым воздухом, закрепленному в правой верхней части корпуса погружной платформы, при этом к нижнему левому краю корпуса погружной платформы прикреплен трехосевой манипулятор, на конце стрелы которого размещена система отметки места повреждения кабеля, состоящая из всплывающего буя и лебедки с тросом, жестко прикрепленная к клешнеобразному зацепу, при этом на левой боковой наружной части корпуса погружной платформы закреплен манипулятор с видеокамерой, а в верхней части корпуса погружной платформы установлен курсовой сервопривод, к которому посредством промежуточной рамы прикреплен сервопривод тангажа, на оси которого установлен водометный двигатель, при этом в нижних углах корпуса погружной платформы размещены четыре датчика положения платформы, а внутри верхней части корпуса погружной платформы установлен электронный блок управления положением платформы, выполненный с возможностью подключения к электронному блоку, выполненному с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами и первым, вторым, третьим, четвертым, пятым и шестым выходами, при этом в верхней части блока дистанционного управления спереди установлены красная и зеленая сигнальные лампы, сзади установлена кнопка «Маяк», в центре установлены джойстик управления горизонтальным положением погружной платформы, джойстик управления вертикальным положением погружной платформы, джойстик управления положением видеокамеры и джойстик управления трехосевым манипулятором, в боковой его части справа установлен монитор, а электронный блок управления положением платформы выполнен с первым, вторым и третьим входами и первым, вторым, третьим, четвертым и пятым выходами, при этом первый вход электронного блока управления положением платформы подключен к выходу датчиков положения платформой, второй вход подключен к выходу элемента выдержки времени, а третий вход подключен к первому выходу электронного блока, первый выход электронного блока управления положением платформы подключен к обмотке управления водометным двигателем, второй выход - к обмотке управления курсовым серповприводом, третий выход подключен к обмотке управления сервоприводом тангажа, четвертый выход подключен к обмотке управления продувочными клапанами, пятый выход подключен к первому входу электронного блока, второй вход которого подключен к выходу видеокамеры, третий вход - к выходу манипулятора видеокамеры, четвертый вход - к выходу трехосевого манипулятора, пятый вход - к выходу поискового эхолота, шестой вход подключен посредством кабеля связи к блоку дистанционного управления, седьмой вход подключен к сигнальному промежуточному микровыключателю, а восьмой вход - к сигнальному концевому микровыключателю, пятый выход подключен к радиационно стойкой обмотке выталкивающего электромагнита, а шестой выход подключен посредством кабеля связи к монитору и блоку дистанционного управления.
| Автономное устройство для определения места повреждения кабеля | 2019 |
|
RU2730384C1 |
| Устройство для определения места повреждения кабеля | 2019 |
|
RU2725168C1 |
| KR 101468033 B1, 10.12.2014 | |||
| УСТРОЙСТВО ДЛЯ ЛАЗЕРНОЙ ПОДГОНКИ РЕЗИСТОРОВ | 1995 |
|
RU2098877C1 |
| KR 100983561 B1, 27.09.2010. | |||

