Изобретение относится к электротехнике и может быть использовано для определения мест повреждения на кабельных линиях электропередачи и связи.
Известно устройство для определения места повреждения кабеля (пат. РФ №2585323, авторы Кашин Я.М., Кириллов Г.А., Бордиян Р.Н.), содержащее импульсный измеритель, радиотелефон, источник радиоактивного излучения (ИРИ), установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным относительно оси симметрии свинцового контейнера влево, прижимаемого к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор торцевыми частями упруго связан со свинцовой крышкой распорными пружинами и своей левой стороной соединен посредством гибкого троса, находящегося в стальной оболочке, с кнопкой дистанционного управления.
Однако это устройство и входящий в его состав ИРИ не обеспечивают достаточно безопасной работы оператора, перемещающего устройство вдоль трассы в зоне повреждения кабеля, вследствие того, что находящийся в свинцовом контейнере ИРИ, устанавливаемом оператором на землю, создает определенную зону радиоактивной» опасности для оператора, находящегося в непосредственной близости к ИРИ в момент нажатия им кнопки дистанционного управления.
Увеличение безопасной дальности в известном устройстве для определения места повреждения кабеля приводит к необходимости увеличения длины гибкого троса, что приводит к увеличению сил трения его о внутреннюю поверхность стальной оболочки при нажатии оператором на кнопку дистанционного управления, и соответственно, необходимости дополнительных усилий, прилагаемых оператором для нажатия на кнопку дистанционного управления.
Кроме того, оператор, вручную перемещающий ИРИ вдоль трассы в зоне повреждения кабеля, нажимая и удерживая кнопку дистанционного управления не может обеспечить точность совмещения проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки из-за отсутствия возможности фиксации свинцового затвора при полном совмещении этих каналов и информированности об их совмещении, а это в свою очередь приводит к смещению затвора относительно вертикального канала свинцового контейнера и вертикального узконаправленного выходного канала свинцовой крышки, и как следствие - к уменьшению потока радиоактивного γ-излучения, проходящего через проходной канал свинцового затвора и вертикальный узконаправленный выходной канал свинцовой крышки и воздействующего на поврежденный кабель, в результате чего созданная искусственная волновая неоднородность в изоляции кабеля может быть частично размыта, что приводит к уменьшению точности определения места повреждения кабеля.
Наиболее близким к заявляемому изобретению по технической сущности и принятым авторами за прототип является устройство для определения места повреждения кабеля (пат. РФ №2650081, авторы Кашин Я.М., Кириллов Г.А., Варенов А.Б.), содержащее импульсный измеритель, радиотелефон, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным относительно оси симметрии свинцового контейнера влево, прижимаемого к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной. На левой наружной стороне свинцового контейнера закреплен блок автономного управления, состоящий из реле времени, кнопки включения реле времени и аккумуляторной батареи, а к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационно-стойкой обмотки, подключенной к выходу реле времени, и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора.
Недостатками данного устройства являются:
Необходимость постоянного выполнения вручную однотипных one-раций, а именно: переноски свинцового контейнера с ИРИ на небольшие расстояния вдоль трассы кабеля в зоне его повреждения, корректировки положения свинцового контейнера на трассе и ручного управления свинцовым затвором, и кроме того - периодического перемещения второго оператора из безопасной зоны к месту повреждения кабеля и обратно, что увеличивает время поиска места повреждения кабеля увеличивается.
Возможность слабого воздействия γ-излучения через слой земли на поврежденный кабель из-за неполного прохождения γ-излучения от ИРИ через проходной канал свинцового затвора, вертикальный канал свинцового контейнера и вертикальный узконаправленный выходной канал, обусловленного возможностью неполного их совмещения и отсутствием у оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, информации о полном совмещении этих каналов.
Недостаточное обеспечение безопасной работы оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, вследствие того, что у него отсутствует информация об открытии свинцового затвора (совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом), и он, не владея этой информацией, может подойти к свинцовому контейнеру с ИРИ в то время, когда три канала совмещены, и поток γ-излучения рассеивается в окружающем пространстве, что оказывает негативное воздействие на организм оператора и находящихся поблизости людей.
Задачей предлагаемого изобретения является усовершенствование устройства для определения места повреждения кабеля, позволяющее сократить время определения места повреждения кабеля и обеспечить безопасность работы оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля.
Технический результат заявленного изобретения - обеспечение автоматизации процесса управления устройством, уменьшение вероятности радиоактивного облучения оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, за счет обеспечения возможности его информирования о точном совмещении проходного, вертикального и вертикального узконаправленного выходного каналов, а также предотвращение неполного прохождения γ-излучения от ИРИ и, соответственно, слабого воздействия γ-излучения через слой земли на поврежденный кабель.
Технический результат достигается тем, что в устройстве для определения места повреждения кабеля, содержащем импульсный измеритель, радиотелефон, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным относительно оси симметрии свинцового контейнера влево, прижимаемого к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационно-стойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом на наружной стороне свинцового контейнера закреплен блок автономного управления, содержащий аккумуляторную батарею, при этом устройство для определения места повреждения кабеля дополнительно оборудуется блоком дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо», а свинцовый контейнер выполняется с зацепами, устанавливается на управляемом посредством блока дистанционного управления шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата, удерживающую раму, выполненную с возможностью вертикального перемещения посредством двух домкратов и оснащенную симметрично расположенными боковыми выступами, внутри которых нарезается внутренняя резьба, при этом свинцовый контейнер жестко закрепляется в удерживающей раме посредством зацепов, а блок автономного управления дополнительно содержит красную сигнальную лампу и зеленую сигнальную лампу, устанавливаемые в верхней его части, и электронный блок, при этом на упоре со стороны свинцового затвора устанавливается сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки устанавливается нижний концевой выключатель, а в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки устанавливается сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполняется равным расстоянию от левого края свинцового затвора до правого края вертикального проходного канала.
Каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу домкрата.
Обеспечение автоматизации управления устройством достигается за счет того, что свинцовый контейнер выполняется с зацепами, посредством которых он жестко закрепляется в удерживающей раме, и устанавливается на управляемом посредством блока дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо» шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата и удерживающую раму, выполненную с симметрично расположенными боковыми выступами, внутри которых нарезается внутренняя резьба, и с возможностью вертикального перемещения посредством домкрата, при этом жестко закрепляется в удерживающей раме каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, при этом вал электродвигателя связан с валом домкрата посредством червячной передачи, состоящей из червяка, нарезаемого на валу электродвигателя и червячного колеса, жестко закрепляемого на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезаемой на валу домкрата. При этом каждый домкрат содержит два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, которые автоматически подключают и отключают соответствующие цепи питания соответствующих электродвигателей соответствующих домкратов.
Таким образом, автоматизация процесса управления устройством для определения места повреждения кабеля позволяет сократить время на определение места повреждения кабеля и исключить из технологии поиска места повреждения кабеля затратные по времени процедуры: периодическое перемещение второго оператора из безопасной зоны к месту повреждения кабеля и обратно, выполнение им вручную однотипных операций: перенос свинцового контейнера с ИРИ на небольшие расстояния вдоль трассы кабеля в зоне его повреждения, корректировку положения свинцового контейнера на трассе, ручное управление свинцовым затвором.
Благодаря тому, что устройство для определения места повреждения кабеля дополнительно оборудуется блоком дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо» оператору не нужно вручную перемещать свинцовый контейнер с ИРИ вдоль трассы кабеля, опускать свинцовый контейнер на землю для открытия свинцового затвора и поднимать его с земли после выполнения операций, обеспечивающих воздействие γ-излучения на поврежденный кабель. Данное усовершенствование позволяет уменьшить вероятность радиационного облучения оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы кабеля в зоне повреждения кабеля.
Предотвращение неполного прохождения γ-излучения от ИРИ и, соответственно, слабого воздействия γ-излучения через слой земли на поврежденный кабель достигается за счет повышения точности совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом путем установки на упоре со стороны свинцового затвора сигнального концевого микровыключателя, который при точном и полном совмещении трех каналов замыкает цепь включения красной сигнальной лампы, загорание которой информирует об этом оператора, находящегося на трассе в зоне повреждения кабеля.
Обеспечение безопасной работы оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, достигается путем уменьшения вероятности его радиоактивного облучения и обеспечения информирования о точном совмещении проходного, вертикального и вертикального узконаправленного каналов, за счет того, что блок автономного управления дополнительно содержит красную сигнальную лампу, установленную в верхней его части, и.электронный блок, а на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель. При полном перемещении свинцового затвора влево, при котором все три канала совмещаются, срабатывает сигнальный концевой микровыключатель, замыкает цепь питания красной сигнальной лампы, которая загорается, информируя оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, о полном совмещении трех вертикальных каналов и начале воздействия γ-излучения через слой земли на поврежденный кабель. При возвращении свинцового затвора влево к исходному положению и достижении им сигнального промежуточного микровыключателя, последний срабатывает, замыкает цепь питания зеленой сигнальной лампы, которая загорается, информируя оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, о том, что вертикальные каналы не совмещены. Погасание красной лампы до включения зеленой лампы информирует оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля, о том, что вертикальные каналы совмещены не полностью, и опасность радиоактивного облучения имеется.
Таким образом, совокупность предлагаемых признаков позволяет сократить время определения места повреждения кабеля за счет автоматизации процесса управления устройством, а также обеспечить безопасность оператора, находящегося на трассе в зоне поврежденного кабеля, за счет уменьшения вероятности его облучения благодаря обеспечению возможности его информирования о точном совмещении проходного, вертикального и вертикального узконаправленного каналов, что предотвращает негативное воздействие γ-излучения на организм оператора.
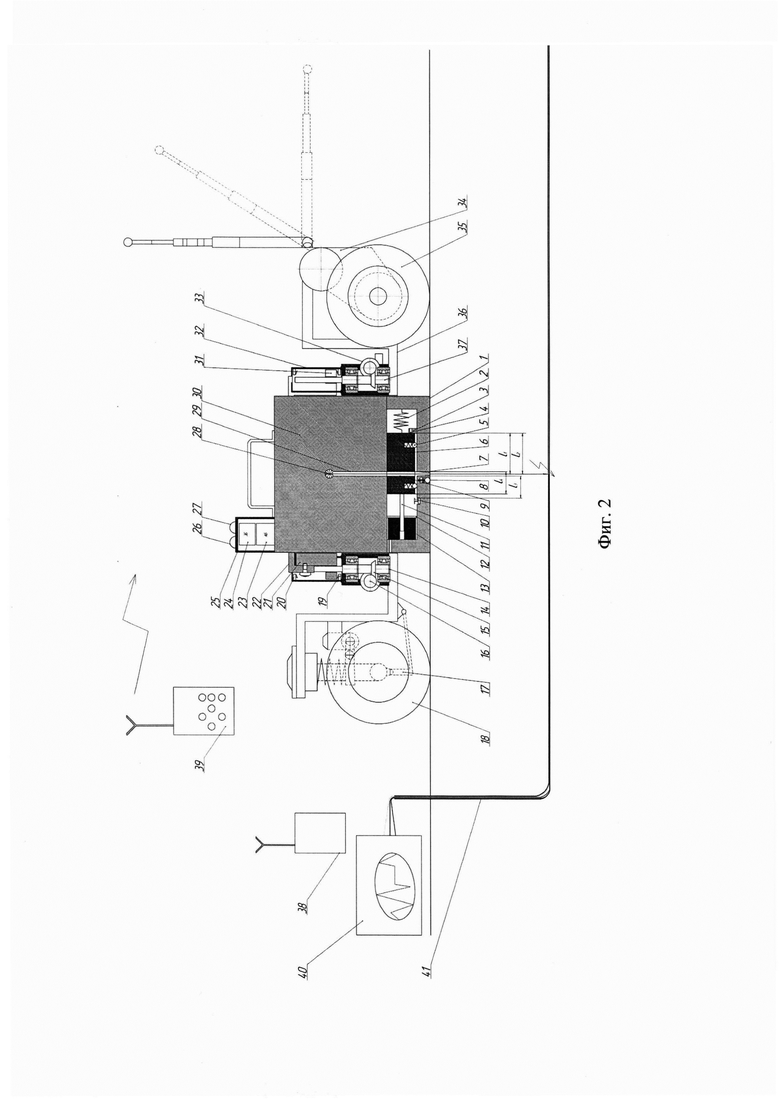
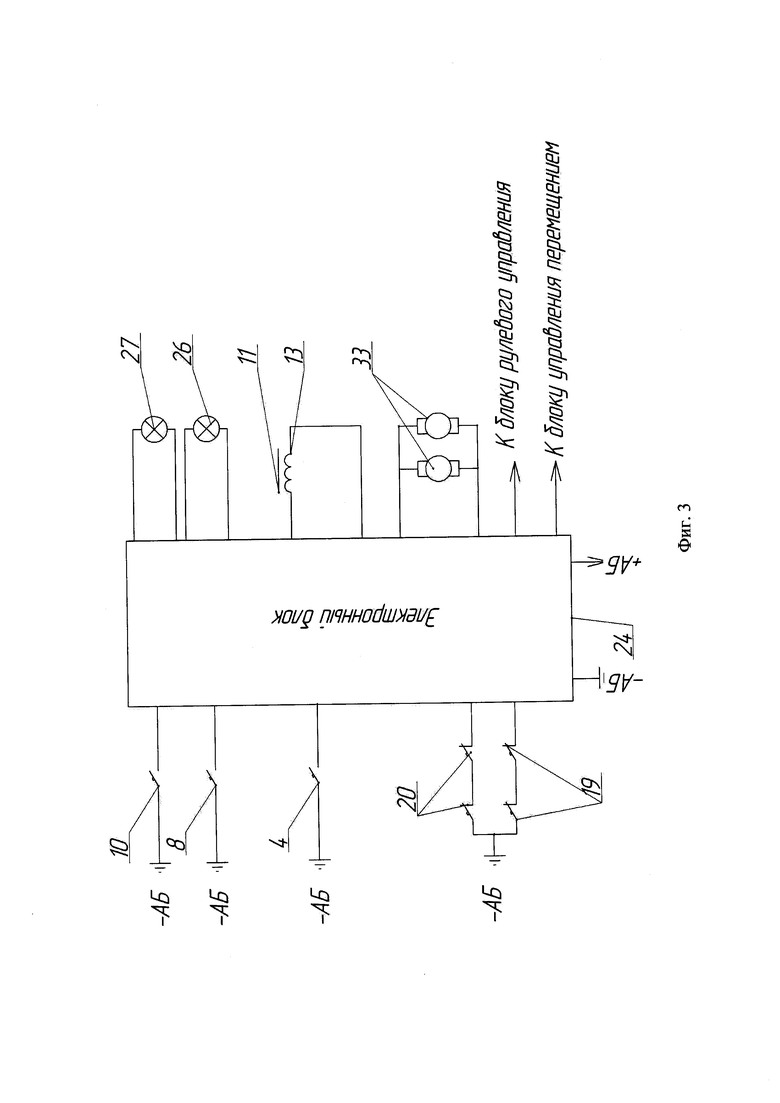
На фиг. 1 представлено предлагаемое устройство для определения места повреждения кабеля с затворным устройством, установленным в исходное положение, на фиг. 2 - предлагаемое устройство с поврежденным кабелем в момент воздействия на него радиоактивного γ-излучения и создания в изоляции кабеля искусственной волновой неоднородности, на фиг. 3 - схема соединения электронного блока с исполнительными механизмами, органами сигнализации и управления.
Устройство для определения места повреждения кабеля, содержит импульсный измеритель 40, радиотелефон 38, блок дистанционного управления 39, оборудованный кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо», источник радиоактивного излучения 28, установленный в центре свинцового контейнера 30 в расположенном по его оси симметрии вертикальном канале 29. В нижней части свинцового контейнера 30 установлен затворный механизм, состоящий из свинцовой крышки 1, по центру которой выполнен вертикальный узконаправленный выходной канал 7, расположенный на одной оси с вертикальным каналом 29 свинцового контейнера 30, и установленного внутри свинцовой крышки 1 свинцового затвора 6 с вертикальным проходным каналом 9, смещенным влево относительно оси симметрии свинцового контейнера 30. Свинцовый затвор 6 прижат к нижней части свинцового контейнера 30 прижимными пружинами с шариками 5 и имеет возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала 9 свинцового затвора 6 с вертикальным каналом 29 свинцового контейнера 30 и вертикальным узконаправленным выходным каналом 7 свинцовой крышки 1 по оси симметрии свинцового контейнера 30. Свинцовый затвор 6 своей правой торцевой частью упруго связан со свинцовой крышкой 1 распорной пружиной 2. К левой внутренней стороне свинцовой крышки 1 жестко прикреплен выталкивающий электромагнит 12, состоящий из радиационно-стойкой обмотки 13 и стального стержня-якоря 11, жестко прикрепленного к левой стороне свинцового затвора 6. В нижней правой части свинцовой крышки 1 установлен упор 3, расстояние  от которого до оси симметрии вертикального канала 29 свинцового контейнера 30 выполнено равным расстоянию
от которого до оси симметрии вертикального канала 29 свинцового контейнера 30 выполнено равным расстоянию  от оси симметрии вертикального проходного канала 9 до правого края свинцового затвора 6. На наружной стороне свинцового контейнера 30 закреплен блок автономного управления 25, содержащий аккумуляторную батарею 23.
от оси симметрии вертикального проходного канала 9 до правого края свинцового затвора 6. На наружной стороне свинцового контейнера 30 закреплен блок автономного управления 25, содержащий аккумуляторную батарею 23.
Свинцовый контейнер 30 выполнен с зацепами 22 и установлен на управляемом посредством блока дистанционного управления (БДУ) 39 шасси. Шасси содержит несущую раму 36, ведущие колеса 35, рулевые колеса 18, блок рулевого управления 17, электропривод ведущих колес 34, два домкрата 32 и удерживающую раму 21. Удерживающая рама 21 выполнена с симметрично расположенными боковыми выступами 31, внутри которых нарезана внутренняя резьба. Удерживающая рама 21 имеет возможность вертикально перемещаться посредством двух домкратов 32.
Свинцовый контейнер 30 жестко закреплен в удерживающей раме 21 посредством зацепов 22.
Блок автономного управления 25 дополнительно содержит красную сигнальную лампу 26 и зеленую сигнальную лампу 27, установленные в верхней его части, и электронный блок 24.
На упоре 3 со стороны свинцового затвора 6 установлен сигнальный концевой микровыключатель 4. В нижней наружной части свинцовой крышки 1 установлен нижний концевой выключатель 8. В нижней внутренней части свинцовой крышки 1 слева от вертикального узконаправленного выходного канала 7 свинцовой крышки 1 установлен сигнальный промежуточный микровыключатель 10, расстояние  от правого края которого до левого края вертикального канала 29 свинцового контейнера 30 выполнено равным расстоянию
от правого края которого до левого края вертикального канала 29 свинцового контейнера 30 выполнено равным расстоянию  от левого края свинцового затвора 6 до правого края вертикального проходного канала 9.
от левого края свинцового затвора 6 до правого края вертикального проходного канала 9.
Каждый домкрат 32 содержит электродвигатель 33, вал 37 домкрата 32 с внешней подъемной резьбой, два концевых выключателя 20 крайнего верхнего и два концевых выключателя 19 крайнего нижнего положений удерживающей рамы 21. Вал каждого электродвигателя 33 связан с валом 37 соответствующего домкрата 32 посредством червячной передачи, состоящей из червяка 16, нарезанного на валу электродвигателя 33, и червячного колеса 15, жестко закрепленного на валу 37 домкрата 32, опирающегося на радиально-упорные подшипники 14. Удерживающая рама 21 связана с валом 37 каждого домкрата 32 посредством внутренней резьбы, нарезанной в ее боковых выступах 31, и внешней подъемной резьбы, нарезанной на валу 37 каждого домкрата 32.
Точное определение места повреждения кабеля с помощью предлагаемого устройства осуществляется двумя операторами.
Первый оператор подключает к поврежденному кабелю 41 импульсный измеритель 40 (фиг. 2) и определяет зону повреждения кабеля на трассе. Второй оператор с устройством для определения места повреждения кабеля направляется в зону повреждения кабеля 41. По прибытии в зону повреждения кабеля 41 второй оператор определяет кабелеискателем точное расположение оси кабеля 41 на трассе. После этого второй оператор устанавливает устройство для определения места повреждения кабеля над предполагаемым местом повреждения кабеля 41 в зоне повреждения и отходит на безопасное расстояние. Затем нажав кнопку «Старт» на блоке дистанционного управления (БДУ) 39, подает сигнал на электронный блок 24 на опускание свинцового контейнера 30. При этом напряжение от аккумуляторной батарии 23 через замкнутые контакты сигнального промежуточного микровыключателя 10 подается на зеленую сигнальную лампу 27, которая загорается, информируя второго оператора о том, что вертикальные каналы не совмещены. Одновременно электронный блок 24 через концевые выключатели 19 крайнего нижнего положения (фиг. 1-3), входящие в цепь управления электродвигателями 33 (на фиг. 3 не обозначена, как не имеющая отношения к существу изобретения) подает напряжение прямой полярности от аккумуляторной батареи 23 на электродвигатели 33 домкрата 32. В результате этого валы 37 электродвигателей 33 домкратов 32 начинают вращаться в прямом направлении, передавая вращение через червяки 16, нарезанные на валах электродвигателей 33 на червячные колеса 15, жестко закрепленные на валах 37 домкратов 32, опирающихся на радиально-упорные подшипники 14. В результате этого удерживающая рама 21 вместе с закрепленным в ней посредством зацепов 22 свинцовым контейнером 30 начинает перемещаться относительно несущей рамы 36 вниз. Как только удерживающая рама 21 займет относительно несущей рамы 36 крайнее нижнее положение, ее боковые выступы 31 коснутся концевых выключателей 19 крайнего нижнего положения удерживающей рамы 21, которые разомкнутся и отключат подачу напряжения прямой полярности от аккумуляторной батерии 23 на электродвигатели 33 домкратов 32. В результате этого удерживающая рама 21 с закрепленным в ней свинцовым контейнером 30 остановится, дно свинцовой крышки 1 коснется поверхности земли. При этом нижний концевой выключатель 8 замыкается и подключает радиационно-стойкую обмотку 13 к аккумуляторной батарее 23. В результате этого под действием напряжения аккумуляторной батареи 23 по радиационно-стойкой обмотке 13 протекает электрический ток, который создает магнитный поток, выталкивающий стальной стержень-якорь 11 выталкивающего электромагнита 12, жестко прикрепленный к левой стороне свинцового затвора 6, вправо. В результате этого свинцовый затвор 6, прижатый прижимными пружинами с шариками 5 к нижней части крышки 1 свинцового контейнера 30, смещается по горизонтали вправо до упора 3, расстояние  от которого до оси симметрии вертикального канала 29 свинцового контейнера 30 равно расстоянию
от которого до оси симметрии вертикального канала 29 свинцового контейнера 30 равно расстоянию  от оси симметрии вертикального проходного канала 7 до правого края свинцового затвора 6. При этом распорная пружина 2 сжимается, а по оси симметрии свинцового контейнера 30 полностью совмещаются все три канала: вертикальный канал 29 свинцового контейнера 30, вертикальный проходной канал 9 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. Одновременно сигнальный концевой микровыключатель 4 замыкается и подключает красную сигнальную лампу 26, установленную в верхней части блока автономного управления 25, к аккумуляторной батарее 23. Под действием напряжения аккумуляторной батареи 23 электрический ток протекает через красную сигнальную лампу 26, которая загорается, информируя второго оператора о том, что полностью совмещены все три канала: вертикальный канал 29 свинцового контейнера 30, вертикальный проходной канал 9 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. При этом контакты сигнального промежуточного микровыключателя 10 размыкаются, разрывая цепь питания зеленой сигнальной лампы 27, которая гаснет. Радиоактивное γ-излучение от ИРИ 28 через полностью совмещенные каналы свободно проходит во внешнюю среду, воздействуя через слой земли на поврежденный кабель 41 (фиг. 2), вызывая в его изоляции обратимые изменения типа сконцентрированной искусственной волновой неоднородности, от которой отражается зондирующий сигнал, фиксируемый визуально на экране импульсного измерителя 40 первым оператором и автоматически записываемого в память импульсного измерителя 40. Первый оператор производит анализ полученных результатов измерений и при несовпадении сигнала, отраженного от места повреждения, с сигналом, отраженным от искусственно созданной волновой неоднородности, на экране импульсного измерителя 40, по радиотелефону 38 дает команду второму оператору на перемещение по трассе в ту или иную сторону. По этой команде второй оператор нажимает кнопку «Стоп» на БДУ 39. В результате этого с БДУ 39 на электронный блок 24 подается радиосигнал, по которому электронный блок 24 отключает радиационно-стойкую обмотку 13 выталкивающего электромагнита 12 от аккумуляторной батареи 23, электрический ток по радиационно-стойкой обмотке 13 не протекает, магнитный поток исчезает, свинцовый затвор 6 под действием распорной пружины 2 перемещается влево в свое первоначальное положение. При этом сигнальный концевой микровыключатель 4 размыкается, красная сигнальная лампа 26 гаснет, сигнальный промежуточный микровыключатель 10 замыкается, зеленая сигнальная лампа 27 загорается, а электронный блок 24 переключает цепь управления электродвигателями 33 домкратов 32 через концевые выключатели 20 крайнего верхнего положения удерживающей рамы 21 на напряжение обратной полярности от аккумуляторной батареи 23.
от оси симметрии вертикального проходного канала 7 до правого края свинцового затвора 6. При этом распорная пружина 2 сжимается, а по оси симметрии свинцового контейнера 30 полностью совмещаются все три канала: вертикальный канал 29 свинцового контейнера 30, вертикальный проходной канал 9 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. Одновременно сигнальный концевой микровыключатель 4 замыкается и подключает красную сигнальную лампу 26, установленную в верхней части блока автономного управления 25, к аккумуляторной батарее 23. Под действием напряжения аккумуляторной батареи 23 электрический ток протекает через красную сигнальную лампу 26, которая загорается, информируя второго оператора о том, что полностью совмещены все три канала: вертикальный канал 29 свинцового контейнера 30, вертикальный проходной канал 9 свинцового затвора 6 и вертикальный узконаправленный выходной канал 7 свинцовой крышки 1. При этом контакты сигнального промежуточного микровыключателя 10 размыкаются, разрывая цепь питания зеленой сигнальной лампы 27, которая гаснет. Радиоактивное γ-излучение от ИРИ 28 через полностью совмещенные каналы свободно проходит во внешнюю среду, воздействуя через слой земли на поврежденный кабель 41 (фиг. 2), вызывая в его изоляции обратимые изменения типа сконцентрированной искусственной волновой неоднородности, от которой отражается зондирующий сигнал, фиксируемый визуально на экране импульсного измерителя 40 первым оператором и автоматически записываемого в память импульсного измерителя 40. Первый оператор производит анализ полученных результатов измерений и при несовпадении сигнала, отраженного от места повреждения, с сигналом, отраженным от искусственно созданной волновой неоднородности, на экране импульсного измерителя 40, по радиотелефону 38 дает команду второму оператору на перемещение по трассе в ту или иную сторону. По этой команде второй оператор нажимает кнопку «Стоп» на БДУ 39. В результате этого с БДУ 39 на электронный блок 24 подается радиосигнал, по которому электронный блок 24 отключает радиационно-стойкую обмотку 13 выталкивающего электромагнита 12 от аккумуляторной батареи 23, электрический ток по радиационно-стойкой обмотке 13 не протекает, магнитный поток исчезает, свинцовый затвор 6 под действием распорной пружины 2 перемещается влево в свое первоначальное положение. При этом сигнальный концевой микровыключатель 4 размыкается, красная сигнальная лампа 26 гаснет, сигнальный промежуточный микровыключатель 10 замыкается, зеленая сигнальная лампа 27 загорается, а электронный блок 24 переключает цепь управления электродвигателями 33 домкратов 32 через концевые выключатели 20 крайнего верхнего положения удерживающей рамы 21 на напряжение обратной полярности от аккумуляторной батареи 23.
В результате этого удерживающая рама 20 перемещается вверх до тех пор, пока ее боковые выступы 29 не коснутся верхних концевых выключателей 18. Как только удерживающая рама 20 займет относительно несущей рамы 34 крайнее верхнее положение, ее боковые выступы 29 коснутся концевых выключателей 19 крайнего нижнего положений удерживающей рамы 21, которые разомкнутся и отключат подачу напряжения обратной полярности от аккумуляторной батареи 23 на электродвигатели 33 домкратов 32. Удерживающая рама 21 остановится в крайнем верхнем (транспортировочном) положении.
После этого второй оператор в зависимости от того, в какую сторону и насколько необходимо переместить устройство для определения места повреждения кабеля кнопками дистанционного управления «Вперед» или «Назад», «Влево» или «Вправо» БДУ 39, подает сигнал на электронный блок 24. При этом кнопки «Вперед» или «Назад» БДУ 39 могут быть нажаты и удерживаться одновременно с кнопками «Влево» или «Вправо». Если нажата и удерживается кнопка «Влево» (или «Вправо), то электронный блок 24 посылает импульс напряжения определенной длительности и амплитуды на блок рулевого управления 17, который поворачивает рулевые колеса 18 влево (или вправо) до отпускания вторым оператором соответствующей кнопки. Если нажата и удерживается кнопка «Вперед» или «Назад»», то электронный блок 24, посылает импульс напряжения определенной длительности и амплитуды на обмотку управления электроприводом 34 ведущих колес 35 (на фиг. 1-3 не показана, как не относящаяся к существу изобретения), электропривод 34 приводит ведущие колеса 35 во вращение, и предлагаемое устройство перемещается в соответствующую сторону и в соответствующем направлении.
При одновременном нажатии кнопок «Вперед» и «Назад»» или «Влево» и «Вправо» электронный блок 24 выдает сигнал об ошибке, включая подачу напряжения в цепь управления красной сигнальной лампой 26 (цепь управления на фиг. 3 не показана, как не относящаяся к существу изобретения), которая при этом работает в мигающем режиме. Перемещения устройства для определения места повреждения кабеля при этом не происходит. При отпускании вторым оператором кнопок дистанционного управления на радиотелефоне 38, подача управляющих сигналов с радиотелефона 38 на электронный блок 24 прекращается, все перемещения устройства для определения места повреждения кабеля также прекращаются.
Перемещение второго оператора по команде первого оператора по трассе поврежденного кабеля 41 продолжается до тех пор, пока сигнал, отраженный от места повреждения кабеля, не совпадет с сигналом, отраженным от искусственно созданной волновой неоднородности.
При совпадении сигнала, отраженного от места повреждения, с сигналом, отраженным от искусственно созданной волновой неоднородности, первый оператор подает второму оператору команду «Стоп», которую второй оператор принимает по радиотелефону 38. Место касания дном свинцового контейнера 30 поверхности земли на трассе, при котором первый оператор подал второму оператору команду «Стоп», является точным местом повреждения кабеля 41 на местности.
В случае, когда поверхность земли в месте предполагаемого повреждения кабеля 41 неровная, удерживающая рама 21 опустилась в крайнее нижнее положение, концевые выключатели 19 крайнего нижнего положений удерживающей рамы 21 разомкнулись, а нижний концевой выключатель 8 не коснулся земной поверхности и не замкнулся, электронный блок 24 подает на радиотелефон 38 первому оператору сигнал, включая красную сигнальную лампу 26 в режим мигания «точка-тире». В этом случае второй оператор, осматривает зазор между поверхностью земли и нижним краем свинцовой крышки 1 свинцового контейнера 30 и принимает решение об открытии свинцового затвора 6. Если оператор решает, что зазор мал, и открыть свинцовый затвор 6 можно, он нажимает кнопку «Затвор» на БДУ 39. В этом случае электронный блок 24 подключает радиационно-стойкую обмотку 13 выталкивающего электромагнита 12 к аккумуляторной батарее 23, при этом совмещение трех каналов: вертикального канала 29 свинцового контейнера 30, вертикального проходного канала 9 свинцового затвора 6, вертикального узконаправленного выходного канала 7 свинцовой крышки 1 и дальнейшая работа предлагаемого устройства и поиск с его помощью места повреждения кабеля 41 осуществляются, как описано выше.
Если второй оператор решит, что зазор между поверхностью земли и нижним краем крышки 1 свинцового контейнера 30 слишком велик, и есть вероятность возникновения радиационной опасности при открытии свинцового затвора 6, а точность определения места повреждения кабеля не обеспечится, он нажимает кнопку «Стоп» на БДУ 39. При этом электронный блок 24 переключает цепь управления электродвигателями 33 домкратов 32 через концевые выключатели 20 крайнего верхнего положения удерживающей рамы 21 на напряжение обратной полярности от аккумуляторной батареи 23.
В результате этого удерживающая рама 21 с закрепленным в ней свинцовым контейнером 30 перемещается вверх в крайнее верхнее положение, как описано выше. После этого второй оператор перемещает предлагаемое устройство для определения места повреждения кабеля на некоторое расстояние от предполагаемого места повреждения кабеля, выравнивает поверхность земли над местом предполагаемого повреждения кабеля, затем возвращает устройство на подготовленное место предполагаемое повреждения и нажимает кнопку «Старт», продолжая поиск, как описано выше.
В случае, когда поверхность земли в месте размещения устройства для определения места повреждения кабеля неровная и при опускании удерживающей рамы 21 концевые выключатели 19 крайнего нижнего положений удерживающей рамы 21 еще не разомкнулись, а нижний концевой выключатель 8 уже замкнут, электронный блок 24 отключает электродвигатели 33 домкратов 32 от аккумуляторной батареи 23. Удерживающая рама 21 останавливается, после чего электронный блок 24 подключает к аккумуляторной батарее 23 радиационно-стойкую обмотку 13 выталкивающего электромагнита 12 и далее предлагаемое устройство работает, как описано выше.
Предлагаемое изобретение, выполняя функцию известного из патента РФ на изобретение №2650081 устройства для определения места повреждения кабеля, в то же время в отличие от него позволяет сократить время определения места повреждения кабеля и обеспечить безопасность работы оператора, перемещающего свинцовый контейнер с ИРИ вдоль трассы в зоне повреждения кабеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономное устройство для определения места повреждения кабеля | 2019 |
|
RU2730384C1 |
| Автономное устройство для определения места повреждения кабеля | 2021 |
|
RU2777879C1 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698940C1 |
| Устройство для определения места повреждения подводного кабеля | 2022 |
|
RU2791677C1 |
| Устройство для определения места повреждения кабеля | 2019 |
|
RU2725168C1 |
| Устройство для определения места повреждения кабеля | 2017 |
|
RU2650081C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ | 2015 |
|
RU2585323C1 |
| УСТЬЕВАЯ ГОЛОВКА | 2013 |
|
RU2525894C1 |
| УСТАНОВКА ДЛЯ ЗАГРУЗКИ МЕЛКОДИСПЕРСНЫХ МАТЕРИАЛОВ | 2010 |
|
RU2438956C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |

Изобретение относится к электротехнике и может быть использовано для определения мест повреждения в кабельных линиях электропередачи и связи. Технический результат: обеспечение автоматизации процесса управления устройством, уменьшение вероятности радиоактивного облучения оператора, за счет обеспечения возможности его информирования о точном совмещении проходного, вертикального и вертикального узконаправленного выходного каналов, а также предотвращение неполного прохождения γ-излучения от источника радиоактивного излучения и, соответственно, слабого воздействия γ-излучения через слой земли на поврежденный кабель. Сущность: устройство дополнительно оборудовано блоком дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо». Свинцовый контейнер выполнен с зацепами, установлен на управляемом посредством блока дистанционного управления шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата, удерживающую раму. На упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель. В нижней наружной части свинцовой крышки установлен нижний концевой выключатель, а в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель. Каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы. 1 з.п. ф-лы, 3 ил.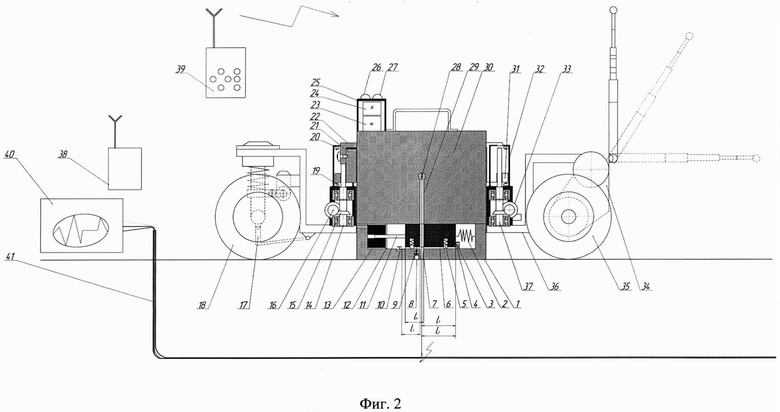
1. Устройство для определения места повреждения кабеля, содержащее импульсный измеритель, радиотелефон, источник радиоактивного излучения, установленный в центре свинцового контейнера в расположенном по его оси симметрии вертикальном канале, при этом в нижней части свинцового контейнера установлен затворный механизм, состоящий из свинцовой крышки, по центру которой выполнен вертикальный узконаправленный выходной канал, расположенный на одной оси с вертикальным каналом свинцового контейнера, и установленного внутри свинцовой крышки свинцового затвора с вертикальным проходным каналом, смещенным относительно оси симметрии свинцового контейнера влево, прижимаемого к нижней части свинцового контейнера прижимными пружинами с шариками и имеющего возможность плавно перемещаться вдоль нее до полного совмещения вертикального проходного канала свинцового затвора с вертикальным каналом свинцового контейнера и вертикальным узконаправленным выходным каналом свинцовой крышки по оси симметрии свинцового контейнера, при этом свинцовый затвор своей правой торцевой частью упруго связан со свинцовой крышкой распорной пружиной, к левой внутренней стороне свинцовой крышки жестко прикреплен выталкивающий электромагнит, состоящий из радиационно-стойкой обмотки и стального стержня-якоря, жестко прикрепленного к левой стороне свинцового затвора, а в нижней правой части свинцовой крышки установлен упор, расстояние от которого до оси симметрии вертикального канала свинцового контейнера выполнено равным расстоянию от оси симметрии вертикального проходного канала до правого края свинцового затвора, при этом на наружной стороне свинцового контейнера закреплен блок автономного управления, содержащий аккумуляторную батарею, отличающееся тем, что устройство для определения места повреждения кабеля дополнительно оборудовано блоком дистанционного управления с кнопками дистанционного управления «Старт», «Стоп», «Затвор», «Вперед», «Назад», «Влево», «Вправо», а свинцовый контейнер выполнен с зацепами, установлен на управляемом посредством блока дистанционного управления шасси, содержащем несущую раму, ведущие колеса, рулевые колеса, блок рулевого управления, электропривод ведущих колес, два домкрата, удерживающую раму, выполненную с возможностью вертикального перемещения посредством двух домкратов и с симметрично расположенными боковыми выступами, внутри которых нарезается внутренняя резьба, при этом свинцовый контейнер жестко закреплен в удерживающей раме посредством зацепов, при этом блок автономного управления дополнительно содержит красную сигнальную лампу и зеленую сигнальную лампу, установленные в верхней его части, и электронный блок, при этом на упоре со стороны свинцового затвора установлен сигнальный концевой микровыключатель, в нижней наружной части свинцовой крышки установлен нижний концевой выключатель, а в нижней внутренней части свинцовой крышки слева от вертикального узконаправленного выходного канала свинцовой крышки установлен сигнальный промежуточный микровыключатель, расстояние от правого края которого до левого края вертикального канала свинцового контейнера выполнено равным расстоянию от левого края свинцового затвора до правого края вертикального проходного канала.
2. Устройство для определения места повреждения кабеля по п. 1, отличающееся тем, что каждый домкрат содержит электродвигатель, вал домкрата с внешней подъемной резьбой, два концевых выключателя крайнего верхнего и два концевых выключателя крайнего нижнего положений удерживающей рамы, при этом вал каждого электродвигателя связан с валом соответствующего домкрата посредством червячной передачи, состоящей из червяка, нарезанного на валу электродвигателя, и червячного колеса, жестко закрепленного на валу домкрата, опирающегося на радиально-упорные подшипники, а удерживающая рама связана с валом домкрата посредством внутренней резьбы, нарезанной в ее боковых выступах, и внешней подъемной резьбы, нарезанной на валу домкрата.
| Устройство для определения места повреждения кабеля | 2017 |
|
RU2650081C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ | 2015 |
|
RU2585323C1 |
| WO 2010116319 A2, 14.10.2010 | |||
| CN 206892250 U, 16.01.2018 | |||
| US 5608328 A1, 04.03.1997 | |||
| US 3991363 A1, 09.11.1976 | |||
| KR 1020120012134 A, 09.02.2012. | |||

