Предлагаемый способ жестового управления и устройство для его реализации относятся к технике устройств ввода информации в компьютеризированные системы, а именно к способам и устройствам жестового управления. Устройства жестового управления позволяют эмулировать как клавиатурные команды, т.е. команды, формируемые нажатием определенных клавиш компьютерной клавиатуры, так и команды, формируемые с помощью устройств координатного ввода, т.е. движением компьютерной мыши или пальцев на сенсорной поверхности планшета или сенсорного экрана.
В настоящее время существует потребность в электронных устройствах с более быстрыми и эффективными методами и интерфейсами для взаимодействия и/или управления внешними электронными устройствами. Такие способы и устройства, их реализующие не только дополняют или заменяют обычные методы взаимодействия. Они снижают когнитивную нагрузку на пользователя и создают более эффективный человеко-машинный интерфейс. Что касается устройств с батарейным питанием, такие способы и интерфейсы позволяют экономить электроэнергию и увеличивать время между зарядками батарей.
Известен ряд устройств подобного назначения. Так в [1], описывается система, осуществляющая проекцию изображения виртуальной клавиатуры на ладонь пользователя. Она включает в себя оптический проектор и телевизионную камеру, расположенные на дужках очков и связанное с ними вычислительное устройство. Касание пальцем свободной руки изображения виртуальной клавиатуры в определенных точках, фиксируется телевизионной камерой, и передается в вычислительное устройство, которое определяет, с каким элементом виртуальной клавиатуры произошло касание пальца пользователя. Недостатками данной системы является высокое энергопотребление, связанное с оптическим проектором, низкая помехоустойчивость.
В [2] рассматривается мобильная носимая система, закрепляемая на предплечье, воспринимающая биопотенциалы соответствующих мышц, участвующих в выработке жестов, совершаемых пальцами кисти. Недостатком данной системы является сложная техническая реализация и низкая помехоустойчивость, необходимость ее индивидуальной калибровки.
В [3] предлагается устройство оцифровки движений конечностей на основе источника структурированной подсветки, аналогично используемой в системе Kinect [4]. Однако устройства данного класса не предназначены для работы с малоразмерными объектами, типа пальцев руки.
В [4] предложена интерактивная измерительная система, определяющая положения пальцев пользователя в области, ограниченной зонами обзора от двух до четырех и более телевизионных камер с технологией TOF, отличающаяся возможностью 3D измерений, однако весьма громоздкой для мобильных приложений.
Фирмой Apple защищен ряд технических решений как текущих, так и будущих реализаций «умного» браслета Apple Watch, позволяющие организовать распознавание ряда жестов. А именно:
- в патенте [5] предложено использование Apple Watch для редактирования текста, и позволяющее упростить работу с ним. Устройство содержит: дисплей, кнопку приема события, формируемого кистью руки и процессор, определяющий длительности формируемых пользователей событий, их фиксацию и выполнение соответствующих действий.
- в патенте [6] предложено снабдить Apple Watch многоточечным устройством ввода информации со специального сенсорного экрана на основе емкостной технологии, и позволяющее идентификацию по крайней мере одного многоточечного жеста. Данное устройство является примером системы, распознающей жесты на плоских поверхностях - на сенсорных экранах и панелях и широко применяется в современных смартфонах и ноутбуках.
К такому же классу устройств относится и устройство распознавания жестов на поверхности трекпада МасВоок, так называемой «поверхности динамического ввода», и защищенной патентом [7]. Устройство имеет частично гибкий металлический контактный участок, определяющий область ввода, и группу индикаторов, расположенную за отверстиями, причем группа отверстий может выборочно освещаться на основе жеста, выполняемого на контактной части.
Известен ряд способов взаимодействия с виртуальными объектами и устройств, предложенных фирмой Leap Motion, предназначенных для 3D-измерений положения кистей рук, а также для распознавания жестов.
В патенте [8] предложен способ использования виртуального «притяжения» между рукой в трехмерном (3D) сенсорном пространстве и виртуальным объектом в виртуальном пространстве, включающий:
- определение виртуальной зоны «притяжения руки», которая отслеживается в трехмерном (3D) сенсорном пространстве;
- создание точки манипуляции руки в ответ на виртуальное защемление между двумя пальцами руки, при этом движение созданной точки манипуляции следует за движением руки, и при этом созданная точка манипуляции остается в непосредственной близости от руки пока рука движется в трехмерном сенсорном пространстве;
- выбор виртуального объекта, поскольку ранее созданная точка манипулирования рукой находится в непосредственной близости от виртуального объекта или точки манипулирования виртуальным объектом, при этом, по крайней мере, два пальца руки не находятся в пределах нулевого расстояния от виртуального объекта;
- а также создание одной или нескольких сил взаимодействия между рукой и выбранным виртуальным объектом в виртуальном пространстве, которые вызывают движение выбранного виртуального объекта в ответ на:
- перемещение точки манипулирования рукой относительно выбранного виртуального объекта;
- а также эскалация виртуального щипкового действия руки по отношению к выбранному виртуальному объекту.
В [9] предложено устройство и методы захвата движений в 3D-пространстве. При этом устройство содержит по крайней мере одну телевизионную камеру, источник подсветки и анализатор изображения (вычислительное устройство), связанный с телевизионной камерой и источником излучения.
Вычислительное устройство захватывает одно или несколько изображений, сгенерированных телевизионной камерой, анализирует эти изображения, и преобразует его в множество 2D-срезов, каждый срез при этом соответствует краевым точкам изображения объекта. Далее производится реконструкция части объекта в трехмерном пространстве на основе идентифицированных положений и размеров поперечного сечения 3D-объекта.
В [10] предлагается «Устройство для управления транспортным средством» которое содержит рулевое колесо, оптический излучатель и оптически сопряженные с ним приемники излучения, подключенные к специализированному вычислителю. Зоной, в которой может осуществляться распознавание жестов оператора транспортного средства, является пересечение секторов обзора первой и второй телевизионных камер на поверхности оптического излучателя. Появление в этой зоне пальца оператора вызывает пересечение светового потока, формируемого излучателем, и соответственно появление теневых сегментов на изображениях, формируемых первой и второй телевизионными камерами, причем по координатам этих сегментов специализированный вычислитель рассчитывает ряд пространственных положений пальца оператора в последовательные моменты времени и определяет по ним траекторию движения. На выходе специализированного вычислителя, входящего в состав устройства формируются сигналы управления оборудованием транспортного средства - магнитолой, навигатором, видеорегистратором, стеклоочистителями и стеклоподъемниками, кондиционером, световым и звуковым оборудованием и пр.
В [11] предлагается «Способ управления положением бокового автомобильного стекла и устройство для его реализации» которые относятся к управлению объектами с помощью жестов, производимых оператором в заданном пространственном объеме. Устройство для управления положением бокового автомобильного стекла содержит камеру и оптически сопряженные с ней первый и второй инфракрасный излучатели, светоотражатель, оптически сопряженный с камерой и с обоими излучателями, сервопривод, связанный с редуктором-подъемником автомобильного стекла. Телевизионная камера размещается в нижнем углу оконного проема автомобильной двери, а угол ее обзора охватывает противоположную поверхность с размещенным там светоотражателем. Вычислитель осуществляет поочередное включение одного из двух излучателей, вводит в память координаты теней на поверхности светоотражателя, образуемые при появлении на пути излучений пальца пользователя, и рассчитывает по ним координаты пальца и скорость его перемещения. Далее вычислитель рассчитывает произведенный пользователем жест и вырабатывает соответствующий этому жесту сигнал в сервопривод, управляющий положением стекла.
В [12] предлагается «Мобильное устройство для организации сенсорной плоскости», которое позволяет организовать взаимодействие с персональным или планшетным компьютером, смартфоном и т.п. дистанционно, не пользуясь встроенными в них сенсорными поверхностями. Для этого оно выполнено в виде браслета, располагаемого на запястье, и позволяет пользователю в любой момент начать набор текста, рисование, редактирование, телефонные вызовы и пр. Кроме того, найдя в окружающей обстановке участок плоской поверхности (стол, окно, подоконник и т.п.), можно «превратить» эту поверхность в сенсорную. Оно содержит источник подсветки и оптически сопряженные с ним первую и вторую телевизионные камеры, направленные в сторону пальцев пользователя, подключенные к первому и второму входам специализированного вычислителя и размещаемые в фиксаторе. При этом телевизионные камеры формируют плоскости обзора, проходящие через определенную заранее строку изображения на фотоприемной матрице и оптический центр объектива каждой телевизионной камеры. Сенсорная плоскость создается пересечением плоскостей обзора первой и второй телевизионных камер в которой фиксируются возможные положения пальцев кисти пользователя. Далее специализированным вычислителем фиксируется пересечение пальцем пользователя сенсорной плоскости и определяется пространственное положение этого пересечения.
Описанное выше устройство и способ распознавания жестов наиболее близки к техническому решению, предлагаемому авторами и является его прототипом.
Предлагается способ распознавания жестов и устройство для его реализации, причем способ основан на формировании сенсорной плоскости в непосредственной близости от определенных участков тела, например, над кистью одной из рук пользователя либо вблизи внутренней стороны предплечья и пр. При этом жест начинается пересечением одним или несколькими пальцами сенсорной плоскости, дальнейшим движением их по определенной траектории и прекращается при выводе пальца/пальцев из сенсорной плоскости. Кроме того, жест может определяться как множество координат группы пальцев, зафиксированных пользователем в определенном положении и пересекающих сенсорную плоскость. Устройство для реализации предлагаемого способа, содержит две телевизионные камеры, образующие измерительную стереосистему, видеосигналы с выхода которых поступают на цифровые видеоинтерфейсы соответствующих микроконтроллеров. Кроме того, устройство содержит источник подсветки, оптически сопряженный с телевизионными камерами, формирующий структурированное излучение в виде плоского потока, пересекающего возможное положение пальцев рук пользователя и располагаемое над ладонью. Устройством, реализующим способ жестового управления, определяются координаты точек пересечения пальцами этой плоскости, в связи с чем данная плоскость и носит название «сенсорной». Само же устройство может быть закреплено на специальном браслете, располагаемом на запястье. Устройство для реализации предлагаемого способа определяет координаты световых пятен, образуемых на поверхности пальцев при их пересечении сенсорной плоскости. Анализируя далее траекторию движения пальца свободной руки, погруженного в сенсорную плоскость, микроконтроллер входящий в состав устройства соотносит ее к одной, из определенного заранее набора траекторий, содержащихся в памяти микроконтроллера, определяя идентификатор динамического жеста. Кроме того, устройство позволяет определить координаты световых пятен, расположенных на поверхностях пальцев той же руки, на запястье которой оно размещено. При этом жест, формируется определенным расположением группы пальцев, пересекших сенсорную плоскость. Далее, анализируя координаты световых пятен и сравнивая их с паттернами определенных заранее жестов, определяется идентификатор произведенного пользователем статического жеста.
Предлагаемый способ жестового управления и устройство его реализующее, иллюстрируется следующими фигурами:
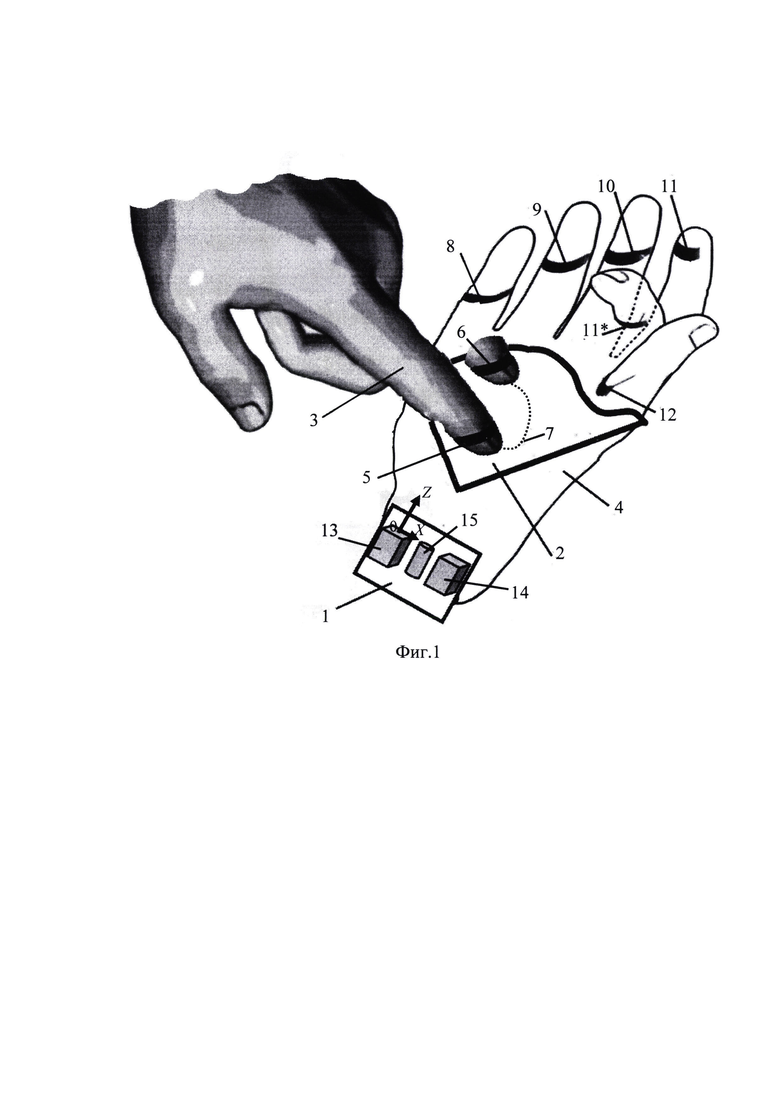
Фиг. 1. Принцип формирования пользовательских жестов, где:
1 - устройство для реализации способа жестового управления,
2 - сенсорная плоскость,
3 - палец,
4 - ладонь,
5 - световое пятно на поверхности пальца 3 (при выполнении динамического жеста), при его вхождении в сенсорную плоскость 2,
6 - световое пятно на поверхности пальца 3 при его выходе из сенсорной плоскости 2,
7 - траектория движения пальца 3 в сенсорной области 2,
8, 9, 10, 11, 11*, 12 - световые пятна на поверхностях пальцев при выполнении статического жеста,
13, 14 - первая и вторая цифровые телевизионные камеры,
OXZ - система координат связанная с оптическим центром объектива цифровой телевизионной камеры 13;
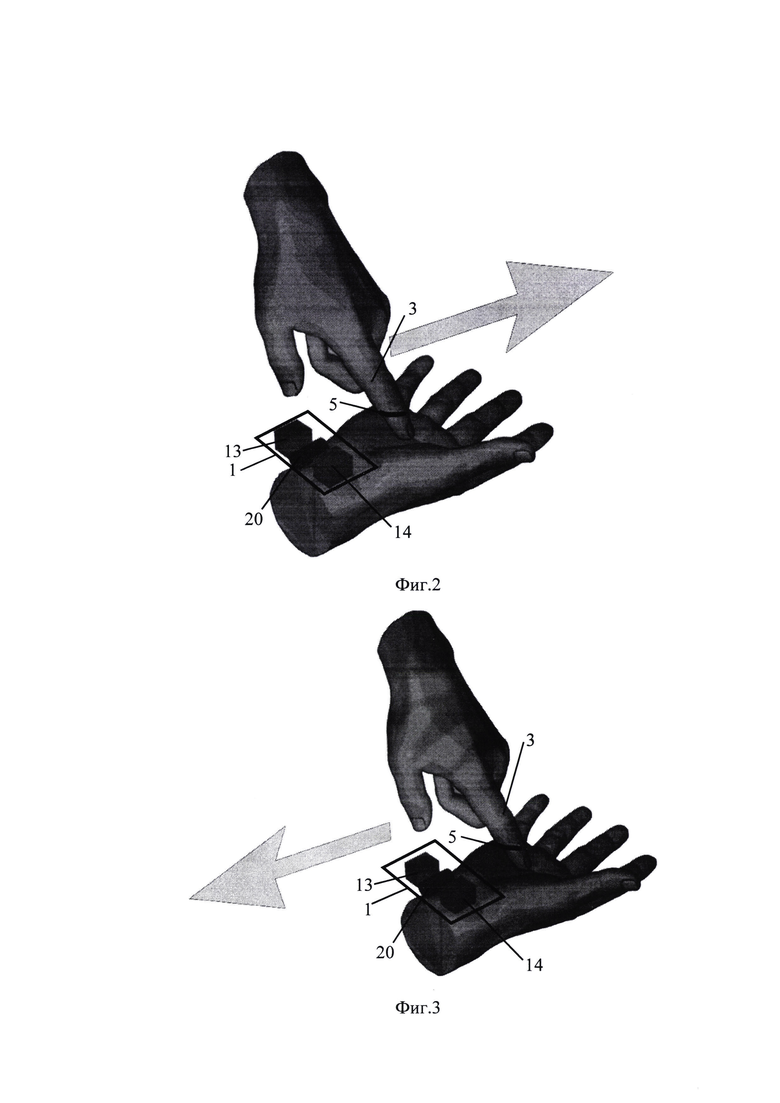
Фиг. 2. Динамический пользовательский жест - «вертикальная прокрутка вверх»;
Фиг. 3. Динамический пользовательский жест - «вертикальная прокрутка вниз»;
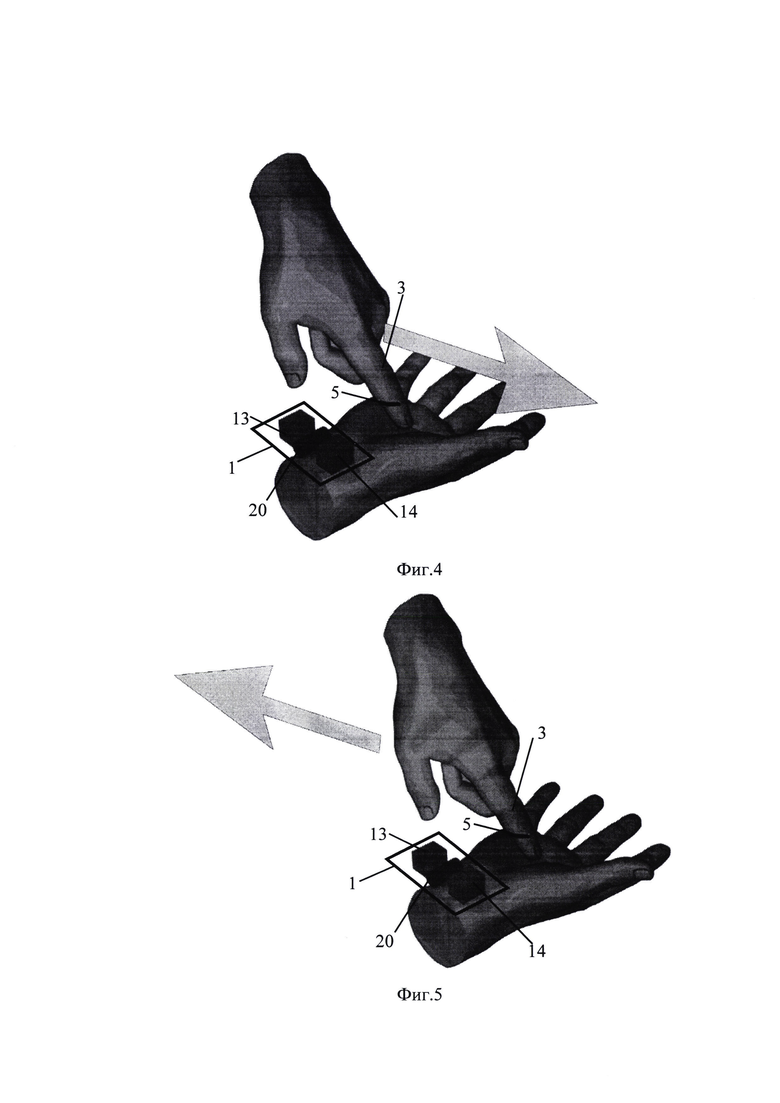
Фиг. 4. Динамический пользовательский жест - «горизонтальная прокрутка вправо»;
Фиг. 5. Динамический пользовательский жест - «горизонтальная прокрутка влево»;
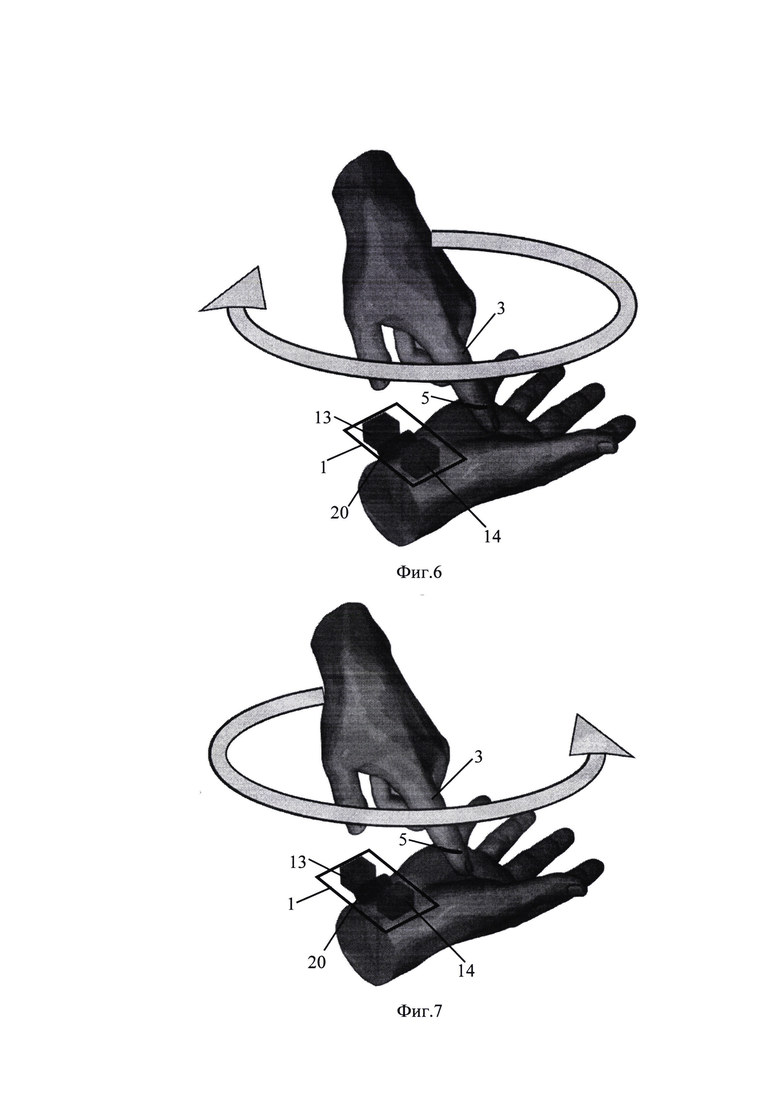
Фиг. 6. Динамический пользовательский жест - «вращение по часовой стрелке»;
Фиг. 7. Динамический пользовательский жест - «вращение против часовой стрелки»;
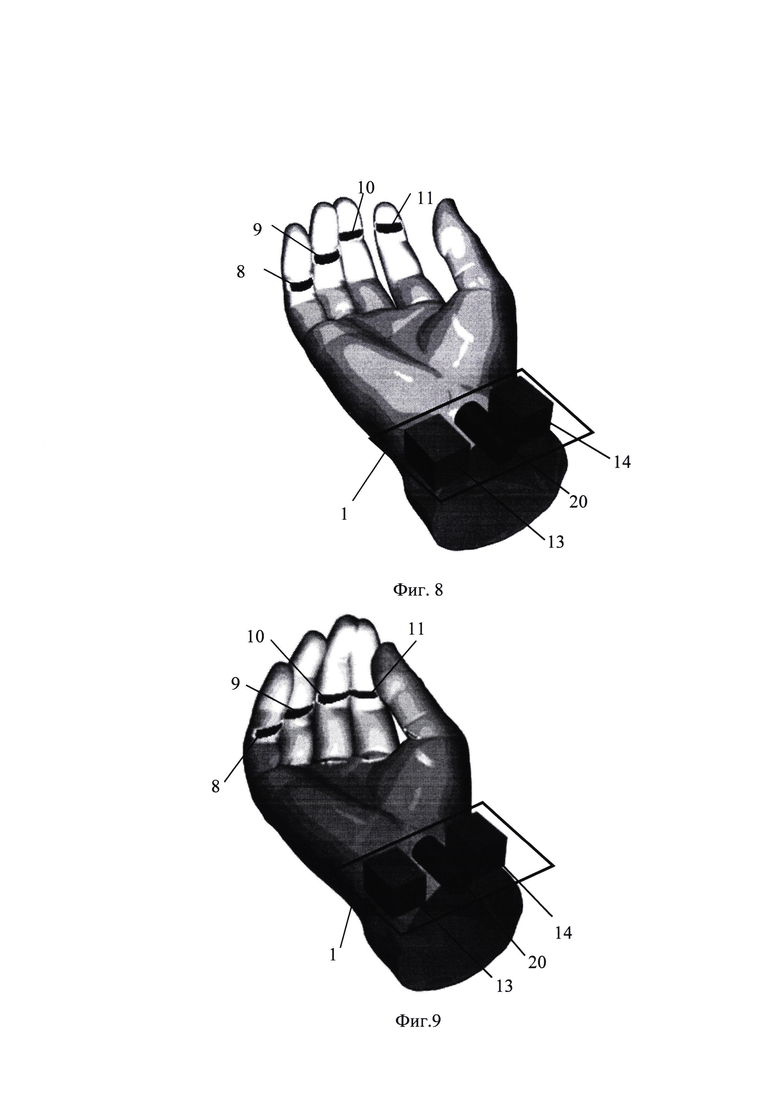
Фиг. 8. Принцип формирования статического пользовательского жеста λ - «четыре пальца в дальней зоне»;
Фиг. 9. Принцип формирования статического пользовательского жеста - «четыре пальца в средней зоне»;
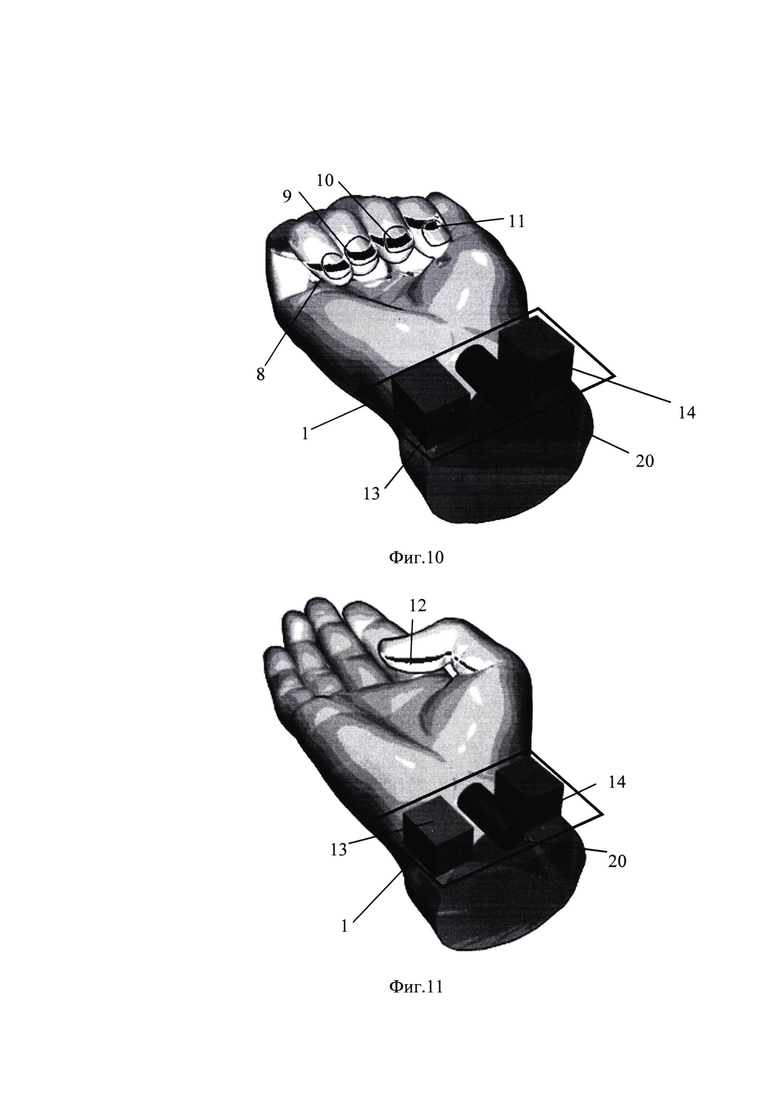
Фиг. 10. Принцип формирования статического пользовательского жеста - «четыре пальца в ближней зоне»;
Фиг. 11. Принцип формирования статического пользовательского жеста - «большой палец»;
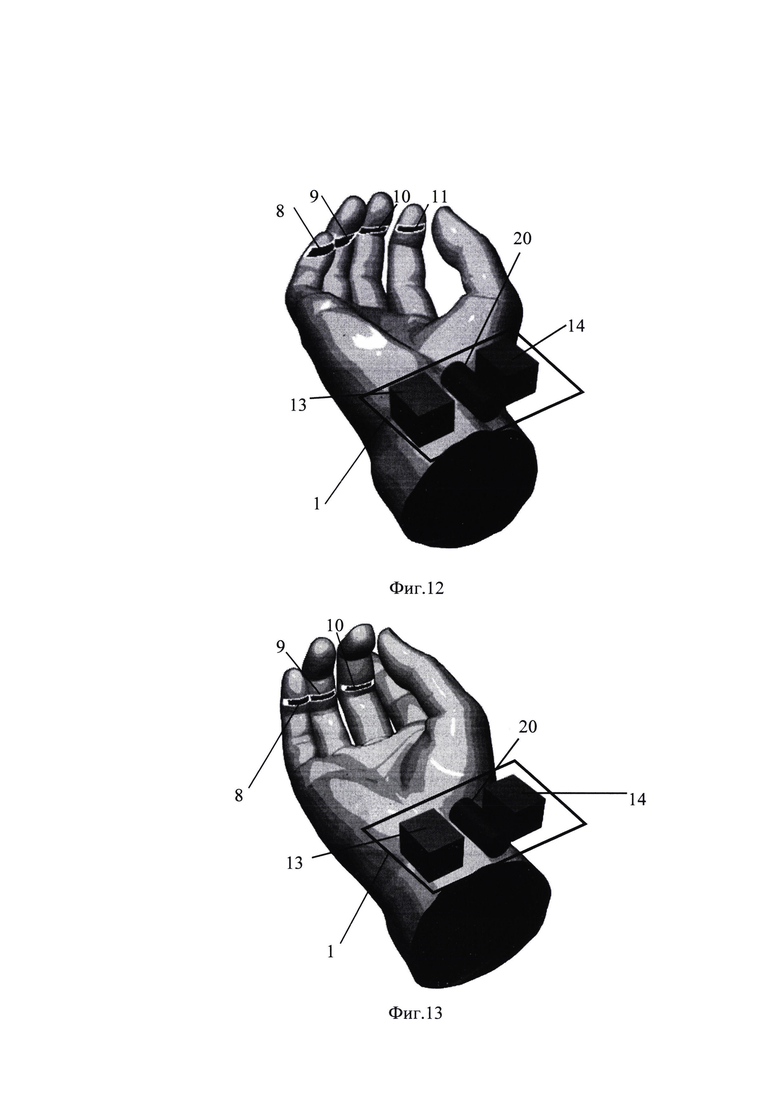
Фиг. 12. Принцип формирования статического пользовательского жеста - «четыре пальца по диагонали»;
Фиг. 13. Принцип формирования статического пользовательского жеста - «три пальца в средней зоне»;
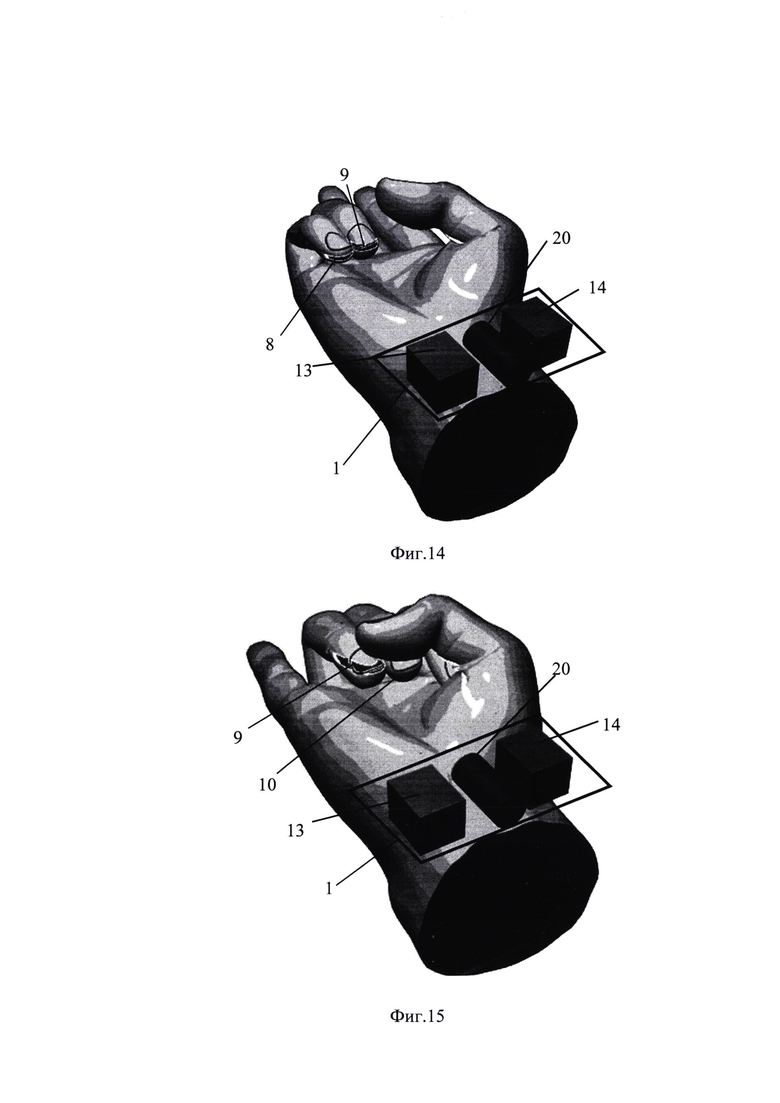
Фиг. 14. Принцип формирования статического пользовательского жеста - «два пальца (мизинец и безымянный) в ближней зоне;
Фиг. 15. Принцип формирования статического пользовательского жеста - «два пальца (безымянный и средний) в ближней зоне»;
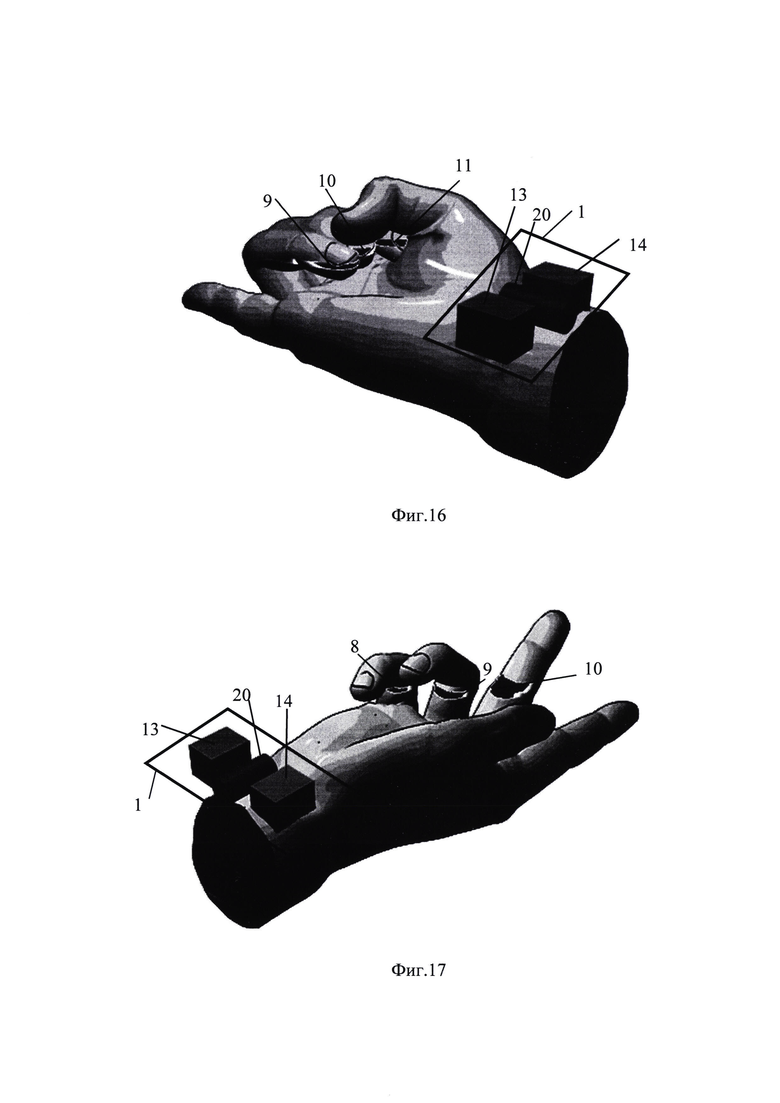
Фиг. 16. Принцип формирования статического пользовательского жеста - «три пальца в ближней зоне»;
Фиг. 17. Принцип формирования статического пользовательского жеста - «три пальца по диагонали в ближней зоне»;
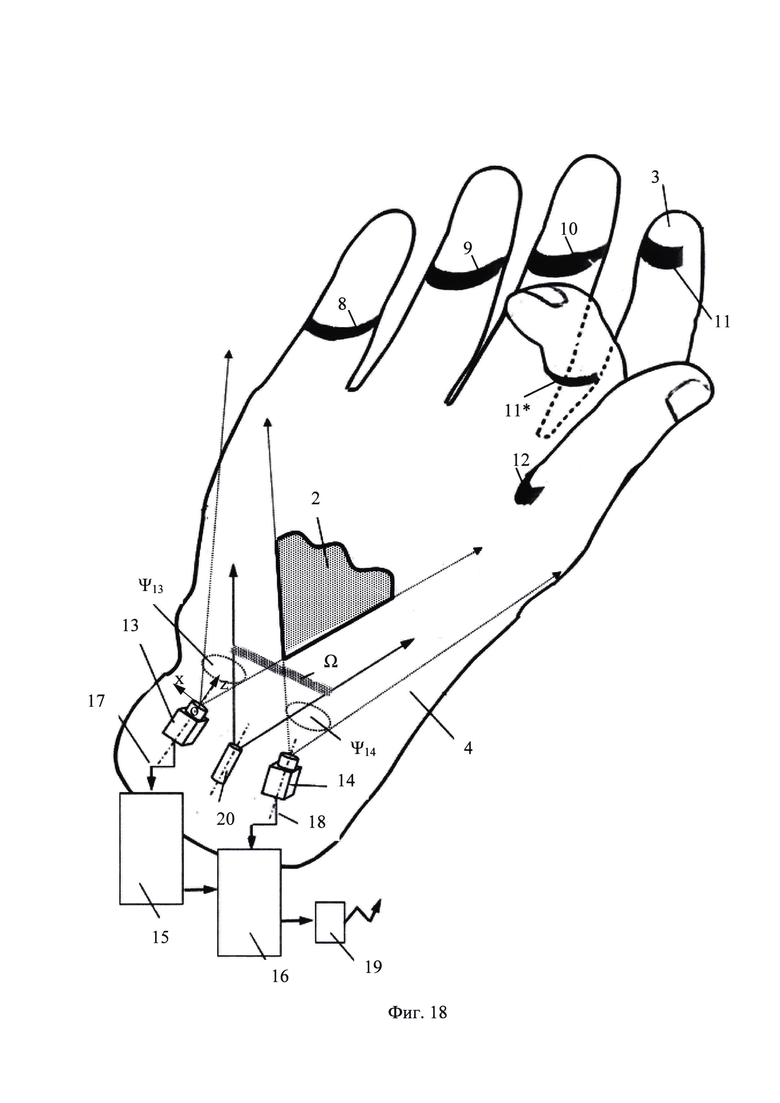
Фиг. 18 - Функциональная схема устройства для реализации способа жестового управления, где:
15, 16 - первый и второй микроконтроллеры,
17, 18 - шины видеоданных первой и второй телевизионных камер,
19 - модуль беспроводной связи,
20 - источник структурированного излучения,
ψ13 - телесный угол обзора цифровой телевизионной камерой 13,
ψ14 - телесный угол обзора цифровой телевизионной камерой 14,
Ω - телесный угол распространения структурированного излучения;
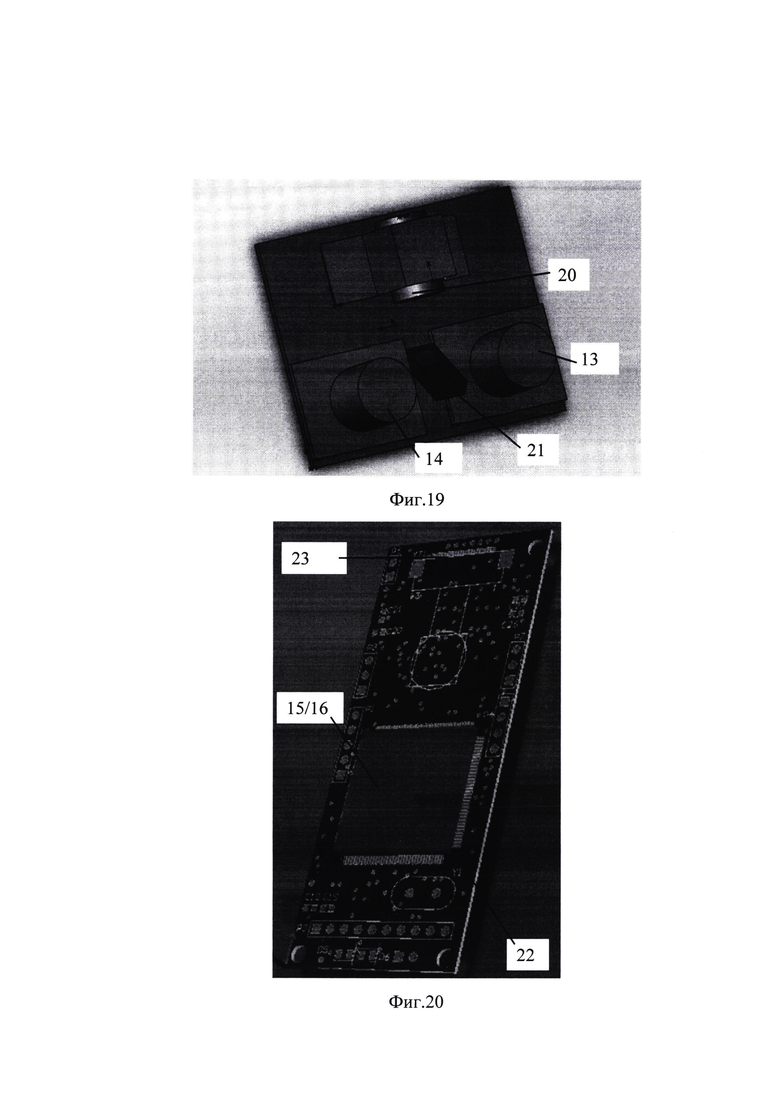
Фиг. 19. 3D модель технической реализации оптической составляющей устройства для распознавания жестов, где:
21 - зеркало.
Фиг. 20. 3D модель технической реализации вычислительного устройства, где:
22 - печатная плата,
23 - посадочное место цифровой телевизионной камеры 13 или 14.
Предлагаемый способ жестового управления, иллюстрируется на фиг. 1.
На запястье одной из рук пользователя, в частности правой, закрепляется, например, с помощью браслета, устройство реализующее предлагаемый способ жестового управления 1. Предполагается, что управляющий жест может совершаться как пальцами той же руки, на запястье которой размещено устройство 1, так и пальцами свободной от устройства руки. Устройство 1 формирует сенсорную плоскость 2, и определяет координаты пересечения пальцами рук пользователя плоскости 2. При входе пальца 3 свободной руки в сенсорную плоскость 2, в момент времени tin, на поверхности пальца 3, обращенной в сторону телевизионных камер 13 и 14, образуется световое пятно 5. Такие же световые пятна 8, 9, 10, 11, 12 образуются при пересечении сенсорной плоскости 2 пальцами правой руки. Далее, координаты световых пятен фиксируются устройством 1 с темпом кадровой развертки телевизионных камер 13, 14 - Fν, до выхода пальцев из сенсорной плоскости 2 в момент времени tout.
Световое пятно 11* формируется при сдвиге пальца в сторону устройства 1, и иллюстрирует формирование «ближней зоны» расположения пальцев.
Таким образом, устройством для реализации способа жестового управления 1, формируется траектория М(Xt, Yt) кривой 7 в виде:

где:
i - номер траектории (привязанный к конкретному пальцу),
tin - момент входа пальца в сенсорную плоскость,
tout - момент выхода пальца из сенсорной плоскости,
Xt, Zt - координата светового пятна в системе координат OXZ.
Определение координат точки М, осуществляется телевизионной стереосъемкой [13]. При этом, в случае, с параллельными оптическими осями и нахождением оптических центров объективов телевизионных камер 13 и 14 в сенсорной плоскости 2, эти уравнения примут вид:

где: b - стереобаза, т.е. расстояние между оптическими центрами объективов телевизионных камер 13 и 14,
 - фокусное расстояние объективов, входящих в состав телевизионных камер 13 и 14,
- фокусное расстояние объективов, входящих в состав телевизионных камер 13 и 14,
 - координата изображения центра светового пятна на поверхности приемной матрицы, входящей в состав телевизионной камеры 13,
- координата изображения центра светового пятна на поверхности приемной матрицы, входящей в состав телевизионной камеры 13,
 - координата изображения центра светового пятна на поверхности цифровой матрицы, входящей в состав телевизионной камеры 14.
- координата изображения центра светового пятна на поверхности цифровой матрицы, входящей в состав телевизионной камеры 14.
Эталонные жесты, так называемые паттерны, хранящиеся в памяти вычислительного устройства (микроконтроллера) представляются в виде вектора траекторий:

где: n - количество возможных жестов.
Идентификатор выполненного жеста может быть определен корреляционной обработкой траектории (2), с паттернами (3), аналогично описанному в [14].
Само уравнение свертки может быть представлено в виде:

где:  - оператор свертки.
- оператор свертки.
При этом, идентификатор жеста r* соответствует максимальному значению функции S(r):

Далее, осуществление предложенного способа жестового управления, заключается в реализации следующих жестов:
Пальцем 3, так называемых «динамических жестов»:
- жест α, «вращение по часовой стрелке», изображен на фиг. 2;
- жест β, «вращение против часовой стрелки», изображен на фиг. 3;
- жест γ, «горизонтальная прокрутка вправо», изображен на фиг. 4;
- жест δ, «горизонтальная прокрутка влево», изображен на фиг. 5;
- жест ε, «вертикальная прокрутка вверх», изображен на фиг. 6;
- жест ζ, «вертикальная прокрутка вниз», изображен на фиг. 7.
Пальцами руки с установленным на ее запястье устройством 1, могут вырабатываться так называемые «статические» пользовательские жесты. При этом решение о выполненном жесте, принимается на основании значений координат световых пятен на поверхностях пальцев, а именно:
- жест λ, «четыре пальца (световые пятна 8, 9, 10, 11) в дальней зоне», изображен на фиг. 8;
- жест μ, «четыре пальца (световые пятна 8, 9, 10, 11) в средней зоне», изображен на фиг. 9;
- жест ν, «четыре пальца (световые пятна 8, 9, 10, 11) в ближней зоне», изображен на фиг. 10;
- жест ξ, «большой палец (световое пятно 12)», изображен на фиг. 11;
- жест О - «четыре пальца (световые пятна 8, 9, 10, 11) по диагонали», изображен на фиг. 12;
- жест π - «три пальца (световые пятна 8, 9, 10) в средней зоне», изображен на фиг. 13;
- жест ρ - «два пальца (световые пятна 8, 9) в ближней зоне», изображен на фиг. 14;
- жест σ - «два пальца световые пятна 9, 10 в ближней зоне», изображен на фиг. 15;
- жест τ - ««три пальца (световые пятна 9, 10, 11) в ближней зоне», изображен на фиг. 16;
- жест υ - «три пальца (световые пятна 8, 9, 10) по диагонали в ближней зоне», изображен на фиг. 17.
При этом, после выполнения требуемого жеста, необходимо сохранить положение пальцев определенный промежуток времени, служащий для его фиксации устройством 1.
Функциональная схема устройства для реализации предложенного способа изображена на фиг. 18.
Наиболее близким по технической реализации к этому устройству является техническое решение, предложенное в патенте №2577467 [12], и являющееся его прототипом.
Устройство содержит цифровые телевизионные камеры 13 и 14, оптически сопряженные друг с другом, образующие измерительную стереосистему и имеющие углы обзора ψ13 и ψ14 соответственно. Кроме того, имеется источник структурированного излучения 20, оптически сопряженный с цифровыми телевизионными камерами 13 и 14. Его световой поток (например, инфракрасного излучения) Ω, представляет собой плоскость, расположенную над ладонью 4, пересекающую фаланги пальцев в процессе формирования управляющего жеста, и образуется пересечением трех телесных углов Ω13, Ω14 и Ω:

Цифровые видеопотоки 17 и 18 с выходов телевизионных камер 13 и 14, с частотой кадров ^ поступают на первые входы микроконтроллеров 15 и 16, со встроенным цифровым интерфейсом DCMI (Digital Camera Interface) [15]. Наличие только одного аппаратного интерфейса DCMI в каждом, требует, для обработки стереоизображения, использования двух микроконтроллеров, подключаемых к соответствующей цифровой видеокамере. Тем не менее, при этом исключается необходимость дополнительных аппаратных решений, что упрощает техническую реализацию данного устройства и, учитывая низкую стоимость микроконтроллеров, уменьшает конечную стоимость устройства. В данном устройстве могут использоваться микроконтроллеры типа STM32F205, STM32F407ZET6 и т.п.
Мощность светового потока Ω, должна быть достаточной для порогового обнаружения (реализуемого программой обработки, заложенной в микроконтроллеры 15 и 16, изображений световых пятен.
Дальнейшая обработка, реализуемая микроконтроллерами 15 и 16 осуществляется следующим образом:
- формируются массивы:

- для первой телевизионной камеры 13 и

- для второй телевизионной камеры 14,
в случае выполнения динамических жестов.
Или:

- для первой телевизионной камеры 13 и

- для второй телевизионной камеры 14,
в случае выполнения статических жестов.
Отсутствие светового пятна на каком-либо из пальцев, фиксируется программой обработки в виде «нулевой» координаты этого пятна в массивах L и М.
Массив I (в случае динамического жеста) или L (в случае статического), передается с 1-го выхода микроконтроллера 15 на 2-й вход микроконтроллера 16.
После приема этого массива, микроконтроллер 16:
рассчитывает по значениям элементов массивов I, K или L, М, координаты световых пятен 5, 6 (динамический жест) или 8, 9, 10, 11, 12 (статический жест), относительно системы координат 0XZ, по формуле (2);
- согласно уравнению (5) определяет идентификатор выполненного пользователем жеста r*, как решение, максимизирующее значение функции S(r);
- передает идентификатор выполненного жеста r* на вход модуля беспроводной связи 19.
Модуль беспроводной связи 19 транслирует идентификатор выполненного жеста r* в персональный компьютер, смартфон или к иным сетевым устройствам.
На фиг. 19 приведена 3D модель технической реализации оптической составляющей устройства для распознавания жестов, причем введенное в конструкцию зеркало 21, служит для регулировки расположения сенсорной плоскости.
На фиг. 20, приведен пример выполнения печатной платы 22, на которой размещается микроконтроллер 13 или 14, цифровая телевизионная камера 15 или 16, которая припаивается к контактам посадочного места 21. Кроме того, к одной из плат, с микроконтроллером 14, припаивается шлейф с модулем беспроводной связи 19.
Источники информации
1. Патент США №8228315 В1 от 24.01.2012 г.
2. Патент США №7333090 В2 от 19.02.2008 г.
3. Патент США №7259747 В2 от 21.08. 2007 г.
4. Патент США №7170492 В2 от 30.01. 2007 г.
5. Патент США №10969866 В1 от 06.04. 2021 г.
6. Патент США №8479122 В2 от 02.06. 2013 г.
7. Патент США №10983650 В2 от 20.04. 2021 г.
8. Патент США №10416834 В1 от 17.09. 2019 г.
9. Патент США №8638989 В2 от 28.01.2014 г.
10. Патент РФ №2518404 от 11.09.2012 г.
11. Патент РФ №2556734 от 28.01.2014 г.
12. Патент РФ №2577467 от 15.09.2014 г.
13. Коротаев В.В., Краснящих А.В. Телевизионные измерительные системы. Учебное пособие. Санкт-Петербург, ИТМО, 2008 г. (стр. 42).
14. Скляр Бернард. Цифровая связь. Теоретические основы и практическое применение. Второе издание. Москва, С-Петербург, Киев, 2003 г. (стр. 206).
15. AN5020. Application note/ Digital camera interface (DCMI) for STM32 MCUs. DocID030399 Rev.1.
https://www.st.com/resource/en/application_note/dm00373474-digital-camera-interface-dcmi-on-stm32-mcus-stmicroelectronics.pdf
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ СЕНСОРНОЙ ПЛОСКОСТИ | 2014 |
|
RU2577467C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ БОКОВОГО АВТОМОБИЛЬНОГО СТЕКЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2556734C1 |
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОЙ МАНИПУЛЯЦИИ | 2008 |
|
RU2362216C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2486575C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2518404C2 |
| СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2013 |
|
RU2542949C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО | 2013 |
|
RU2542947C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2566958C1 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ИНТЕРФЕЙСА С ОБЪЕКТОМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2011 |
|
RU2486608C2 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ТРЕХМЕРНОГО ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА | 2013 |
|
RU2514086C2 |
Предлагаемый способ жестового управления и устройство для его реализации относится к технике неконтактного взаимодействия с техническими системами и устройствами. Существенным отличием данного способа жестового управления является использование сенсорной плоскости, формируемой над кистью руки пользователя и представляющей собой поток структурированного излучения, пересечение которого и движение в нем пальцев захватывается двумя микроконтроллерами, подключенными к системе из двух телевизионных камер. Предложен набор из двух групп - динамических и статических жестов, совершаемых пальцами рук. При этом устройство для реализации предлагаемого способа закрепляется на запястье одной из рук, а управляющие динамические жесты осуществляются, например, пальцем свободной руки, формируя жест пересечением сенсорной плоскости и последующим движением пальца по определенной, определяющей идентификатор жеста траектории. А статические жесты осуществляются пересечением сенсорной области группой пальцев, относительное положение которых определяет конкретный жест. Изобретение направлено на расширение арсенала технических средств, в частности работу с малоразмерными объектами, типа пальцев руки, а также повышение помехоустойчивости. 2 н. и 1 з.п. ф-лы, 20 ил.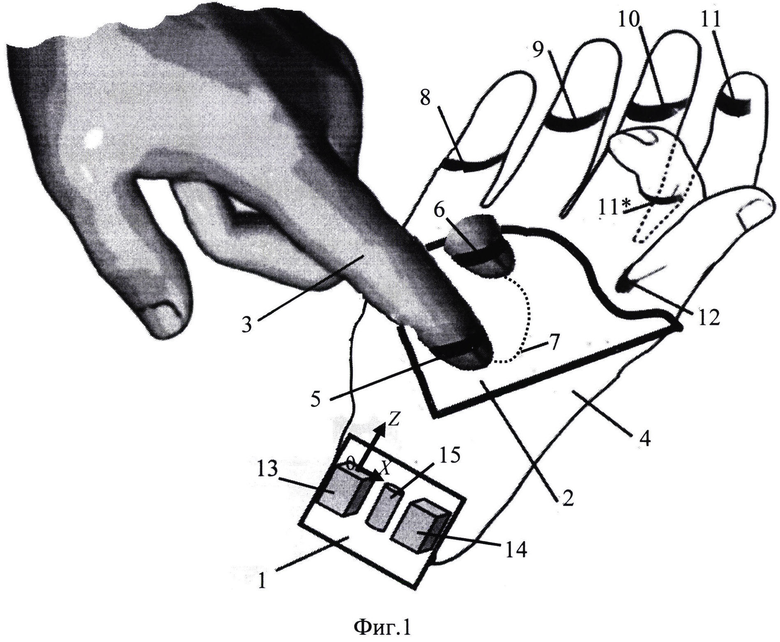
1. Способ жестового управления, заключающийся в том, что над поверхностью ладони создается «сенсорное поле», представляющее собой плоскость, в которой, при пересечении ее пальцами, могут определяться их координаты в неподвижной системе координат, при этом предлагается два набора жестов, а именно «динамического» и «статического» типов, причем динамические жесты осуществляются вхождением одного пальца в сенсорное поле с дальнейшим совершением в нем следующих движений, соотносимых далее к одному из жестов:
- одиночное или циклическое круговое движение пальцем по часовой стрелке с последующим выходом пальца из сенсорной плоскости,
- круговое движение пальцем против часовой стрелки с последующим выходом пальца из сенсорной плоскости,
- движение пальцем в сторону от себя с последующим выходом из пальца из сенсорной плоскости,
- движение пальцем к себе с последующим выходом пальца из сенсорной плоскости,
- движение пальцем вправо от себя с последующим выходом пальца из сенсорной плоскости,
- движение пальцем влево от себя с последующим выходом пальца из сенсорной плоскости,
а статические жесты осуществляются вхождением в сенсорное поле от одного до четырех пальцев с последующей остановкой их движения на время принятия решения о выполненном жесте, причем количество пальцев в группе и их расположение как относительно друг друга, так и на сенсорной плоскости определяет следующие жесты:
- четыре пальца в дальней зоне,
- четыре пальца в средней зоне,
- четыре пальца в ближней зоне,
- большой палец, четыре пальца по диагонали,
- три пальца в средней зоне,
- два пальца (мизинец и безымянный) в ближней зоне,
- два пальца (безымянный и средний) в ближней зоне,
- три пальца в ближней зоне,
- три пальца по диагонали в ближней зоне.
2. Устройство для реализации способа жестового управления по п.1, создающее сенсорную плоскость, в которой осуществляются пользовательские жесты, и содержащее две цифровые телевизионные камеры, образующие стереосистему и оптически сопряженные с источником структурированного излучения, причем цифровой видеосигнал с выхода каждой камеры поступает на первые входы соответственно первого и второго микроконтроллеров, кроме того, выход первого микроконтроллера связан со вторым входом второго, а выход второго микроконтроллера подключен ко входу устройства беспроводной связи, при этом каждый из микроконтроллеров определяет координаты световых фрагментов, образуемых при пересечении одного или нескольких пальцев с плоской поверхностью структурированного излучения и регистрируемых связанной с ним цифровой телевизионной камерой, причем первый микроконтроллер передает координаты световых фрагментов на второй вход второго микроконтроллера, который далее определяет пространственные координаты световых фрагментов, а затем на основании заложенных в него паттернов этих жестов определяет выполненный пользователем жест и далее передает его идентификатор в устройство беспроводной связи, которое в свою очередь транслирует его пользователям, подключенным к беспроводной сети.
3. Устройство для реализации способа жестового управления по п.2, выполненное в виде двух однотипных печатных плат, каждая из которых содержит микроконтроллер, цифровую видеокамеру, подключенную к цифровому видеоинтерфейсу микроконтроллера, а также интерфейс для связи с микроконтроллером, расположенным на второй печатной плате, а также содержит посадочное место для размещения модуля беспроводной связи.
| US 2009103780 A1, 23.04.2009 | |||
| US 2019220099 A1, 18.07.2019 | |||
| US 2015091694 A1, 02.04.2015 | |||
| US 2013265229 A1, 10.10.2013. |

