Предлагаемое изобретение относится к транспортной технике и предназначено для облегчения управления транспортными средствами (автомобилем, самолетом, морским судном). Это достигается приданию существующим средствам управления - автомобильному рулю, штурвалу и прочим устройствам управления, функции распознавания жестов оператора (водителя, пилота и пр.) данного транспортного средства. Это позволяет оператору, не отрываясь от процесса управления, подавать дополнительные команды в виде заданных заранее простых жестов, формируемых, например, большими пальцами левой и/или правой руки в пространстве, ограниченном элементами конструкции автомобильного руля или штурвала. Команды, выдаваемые предлагаемым устройством, в свою очередь, могут служить для управления электронной аппаратурой, установленной на транспортном средстве (магнитолой, навигатором, видеорегистратором, стеклоочистителями и стеклоподъемниками), а также для управления различным оборудованием (кондиционером, вентиляторами, освещением, системами оповещения и контроля и пр.).
Известен ряд устройств, используемых, например, в автомобилях, и упрощающих управление электронным оборудованием. Наиболее распространенный из них - инфракрасный пульт дистанционного управления, позволяющий сформировать управляющие сигналы для автомагнитолы, недостатком которого является необходимость для оператора транспортного средства взять этот пульт в руки, т.е. оторваться от процесса управления. Функции этого пульта могут выполнять кнопки, размещенные на рулевом колесе, но и в этом случае необходим зрительный, либо тактильный поиск требуемой для нажатия кнопки, что также отвлекает оператора от процесса управления транспортным средством.
Имеются системы, предназначенные для передачи информации с зоны рулевого колеса в электронные узлы автомобиля, например, предложенные в патентах фирм Aciers et Outillage Peugeot (Франция) [1], Toyoda Gosei Co., Ltd. (Япония) [2]. С помощью описанных там технических решений возможно управление автомобильной аппаратурой с поверхности рулевого колеса, но все они обладают обозначенным недостатком - отвлекают водителя от его основной функции - управления движением.
В патенте фирмы International Business Machines Corporation (США) [3] предложена система управления автомобильным оборудованием, основанная на использовании распознавания жестов и голосовых команд. Для этого, кроме всего прочего, предлагается установить на поверхности руля так называемое устройство Touchpad (широко применяемое в ноутбуках). Далее, как предлагается авторами этого изобретения, используется перемещение пальца водителя по поверхности Touchpad, причем вычислительное устройство, входящее в состав системы, распознает определенный заранее набор команд, сопоставляемый с определенными движениями пальца. Недостатком данной системы является наличие Touchpad, с активной зоной, занимающей поверхность рулевого колеса.
Наиболее близким по техническому решению с предлагаемым (прототипом), является устройство, запатентованное фирмой Robert Bosh GmbH (Германия) [4]. В этом устройстве с помощью оптически связанных оптоволоконной линией фотоприемника и оптического излучателя регистрируется сила сжатия руля кистью руки водителя транспортного средства. При этом, как утверждается в патенте, сила, с которой водитель сжимает оптоволокно, определяется путем измерения степени поляризации излучения, прошедшего через данное оптоволокно, обкрученное спирально вокруг рулевого колеса. Используя данную систему, водитель может передать команды, изменяя степень сжатия рулевого колеса автомобиля.
Недостатками данной системы является ограниченный набор команд, которые может сформировать водитель, регулируя силу сжатия руля и недостаточную информативность этих команд.
Целью заявляемого устройства является расширение функциональных возможностей существующих устройств управления транспортными средствами путем использования внутреннего пространства, ограниченного рулевым колесом автомобиля либо штурвалом авиационного или морского судна.
На фиг.1 представлена функциональная схема предлагаемого устройства, состоящая из рулевого колеса 1, светоизлучателя 2, выполненного в виде полоски, размещенной с внутренней поверхности рулевого колеса, первой и второй телевизионных камер 3 и 4, оптически сопряженных со светоизлучателем 2, и специализированного вычислителя 5, на входы которого поступают сигналы с выходов телевизионных камер. На выходе специализированного вычислителя 5 формируются сигналы управления оборудованием транспортного средства - магнитолой, навигатором, видеорегистратором, стеклоочистителями и стеклоподъемниками, кондиционером, световым и звуковым оборудованием и пр.
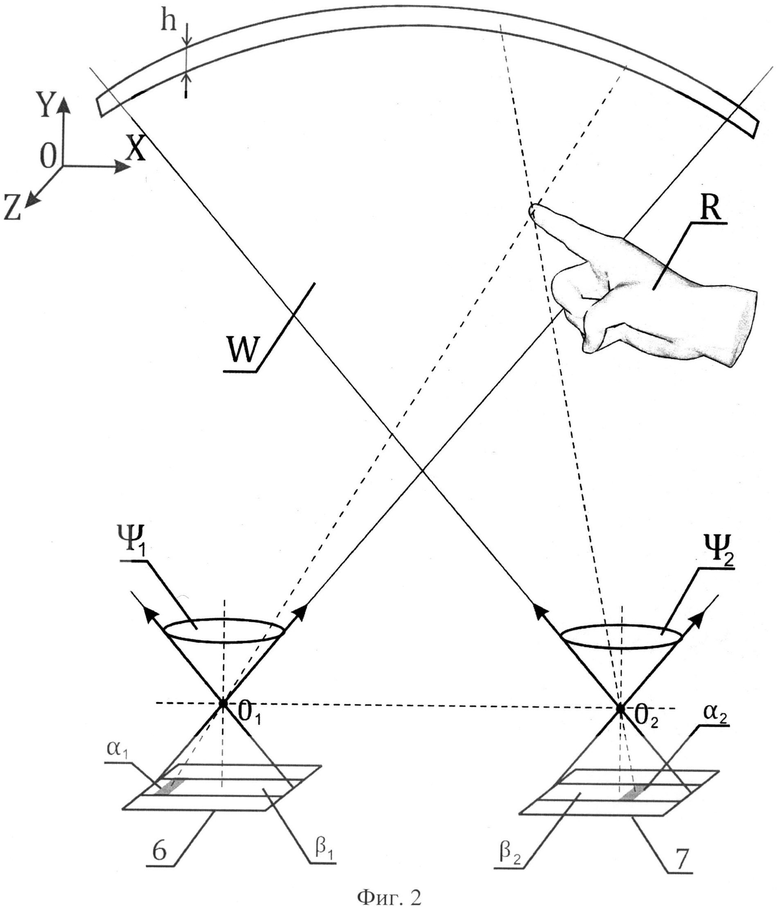
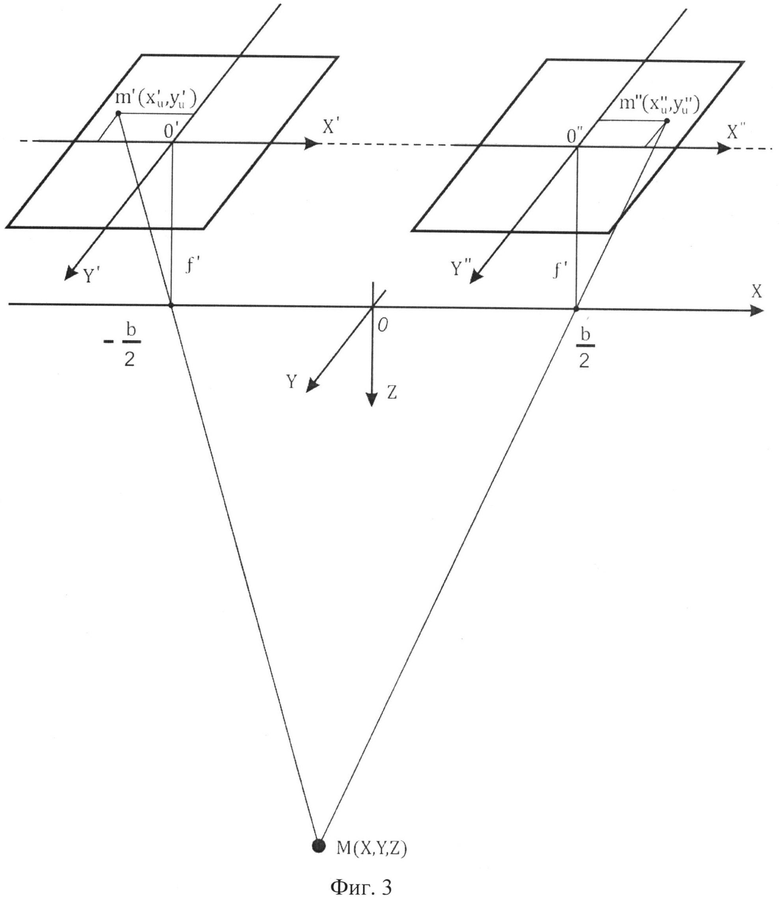
Как видно из оптической схемы, приведенной на фиг.2, рабочая зона W данного устройства образуется пересечением углов обзора первой - и второй - Ψ2 телевизионных камер 3, 4, с поверхностью S светоизлучателя 2. Рабочая зона W имеет узкую ширину h в направлении оси Y, и фактически является двумерной плоскостью, являющейся пространственным аналогом стеклянной touch-панели [5]. При отсутствии в рабочей зоне объектов, на фотоприемных матрицах 6 и 7 формируются изображения светоизлучателя 2 - полоски β1 и β2 соответственно. Появление в рабочей зоне объекта R (пальца оператора транспортного средства), пересекающего рабочую область в направлении Y, вызывает появление на фотоприемных матрицах 6 и 7, входящих в состав телевизионных камер 3 и 4, затененных участков α1 и α2. Их середины позволяют определить пространственное положение точки М, находящейся в рабочей зоне W и принадлежащей объекту R. Определение координат точки М поясняется на фиг.3 и основано на предложенном, например в [3], анализе стереосъемки с двух телевизионных камер с параллельными оптическими осями. Учитывая, что оптические центры объективов O и О2 лежат в плоскости W, Y - координата объекта R всегда равна нулю, расчетные формулы координат X и Z имеют вид [6]

На фиг.4 приведены упрощенные изображения 6 - и жестов {A, B, C, D, E, F}, которые могут быть сформированы оператором транспортного средства для управления.
Очевидно, что каждый из жестов i∈ {А, В, С, D, Е, F] может быть представлен в виде траекторий [Mt]i, t∈{tin...tout}, оцифрованных специализированным вычислителем с циклом σt за промежуток времени между входом пальца в рабочую зону (tin) и выходом из нее (tout). Этот набор координат может быть также представлен в виде набора сигналов ri(t).
Если эталонные жесты, хранящиеся в памяти специализированного вычислителя, представить в виде траекторий [Nt]i,t∈{tin...tour}, или в виде набора сигналов si(t), можно определить корреляционный приемник, состоящий из i корреляторов, выполняющих преобразование входного сигнала (траектории) r(t) в i-выходов корреляторов Zi;(t), каждый из которых описывается уравнением свертки

или

Выбирая i, соответствующий максимальному значению zi(t), можно определить, какому жесту соответствует траектория, описываемая пальцем оператора транспортного средства.
Обнаружение затененных участков α1 и α2 в специализированном вычислителе 5, осуществляется в результате пороговой обработки, учитывая, что яркость светоизлучателя 2, превышает уровень паразитных засветок. На фиг.2 изображение светоизлучателя 2 на фотоприемных матрицах 6 и 7 обозначено β1 и β2 соответственно. При этом величина видеосигнала, представляющего изображения зон β1 и β2, превышает уровень паразитных засветок на участках α1 и α2.
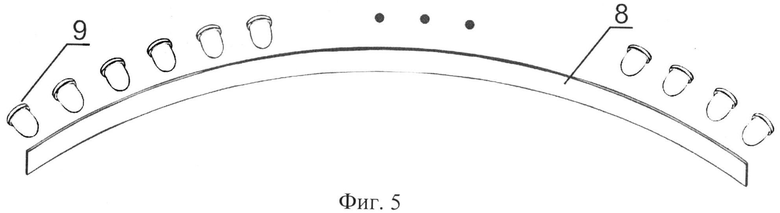
На фиг.5 приведен один из возможных вариантов оптической схемы светоизлучателя 2, где:
8 - светорассеиватель, 9 - набор светоизлучающих диодов, например, ИК-диапазона.
В качестве светорассеивателя может быть использован светорассеивающий экран, выполненный из оптической керамики К01 (в случае применения светоизлучающих диодов 9, работающих в ближней инфракрасной области [8, стр.217].
Светоизлучатель может быть также выполнен на основе оптоволокна бокового свечения [9], как изображено на фиг.6, где: 10 - оптоволокно бокового свечения, 11 -светодиод, например, ИК-излучения.
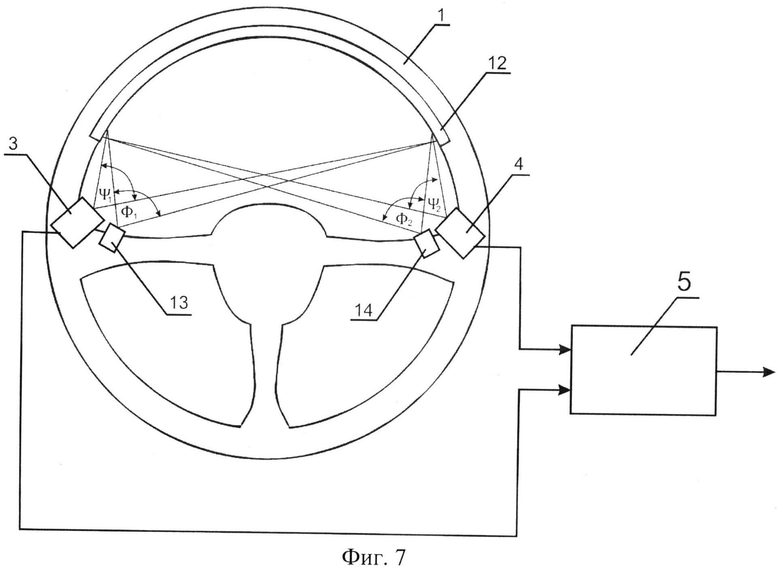
На фиг.7 приведен второй вариант функциональной схемы устройства, состоящей из рулевого колеса 1, первой и второй телевизионных камер 3 и 4, с углами обзора Ψ1 и Ψ2, первого и второго излучателя 13 и 14 с потоками излучения Ф1 и Ф2, светопоглощающей полоски 12 и вычислительного устройства 5.
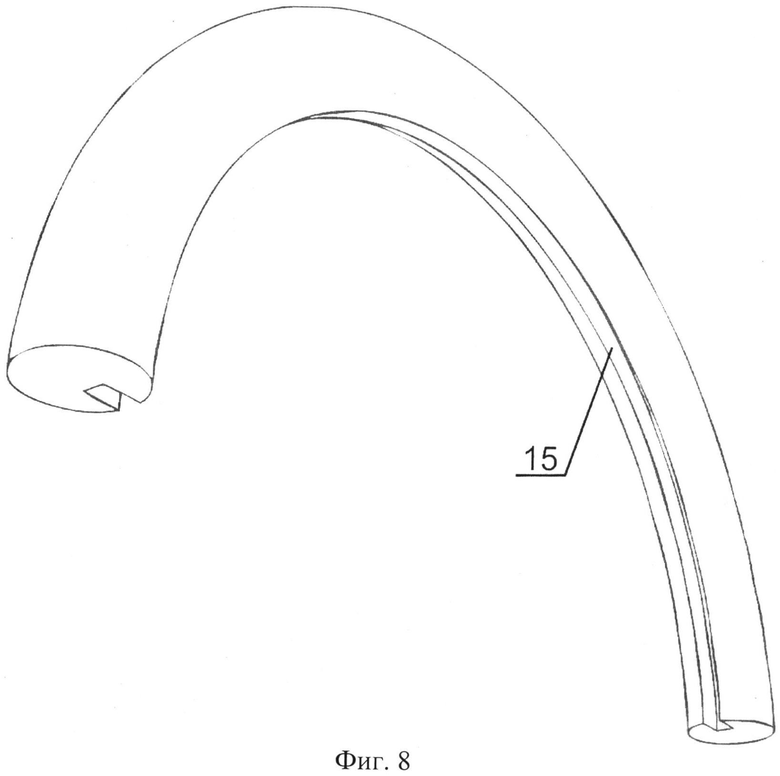
В данной схеме происходит подсвечивание объектов, находящихся в рабочей зоне устройства W, благодаря действию первого и второго излучателей 13 и 14. Их мощность должна обеспечивать яркость участков α1 и α2, (фиг.2), превышающую яркость паразитных засветок. Для предотвращения появления бликов от внутренней поверхности рулевого колеса 1 можно разместить на ее поверхности светопоглотитель, выполненный, например, в виде полоски 12. Она препятствует появлению на фотоприемных матрицах 6 и 7 паразитных засветок, возникающих от переотражения световых потоков Ф1 и Ф2. Светопоглощающая полоска 12 может быть выполнена известным в оптической технике способом, например из стекла с коэффициентом отражения ρ≤0,016 и с полным отсутствием светопропускания [8, стр.354]. Ее роль может также выполнять бленда, выполненная в виде канавки 15, проходящей вдоль внутренней поверхности рулевого колеса 1, как показано на фиг.8. Обнаружение в видеосигнале телекамер 3 и 4 участков, соответствующих α1 и α2, осуществляется специализированным вычислителем 5, учитывающем превышение видеосигналом определенного порогового уровня.
Излучатели 13 и 14 представляют собой ИК-светодиоды с углом излучения, достаточным для охвата внутренней поверхности рулевого колеса, и мощностью, позволяющей надежное обнаружение отраженного от пальца водителя излучения на фоне паразитных засветок.
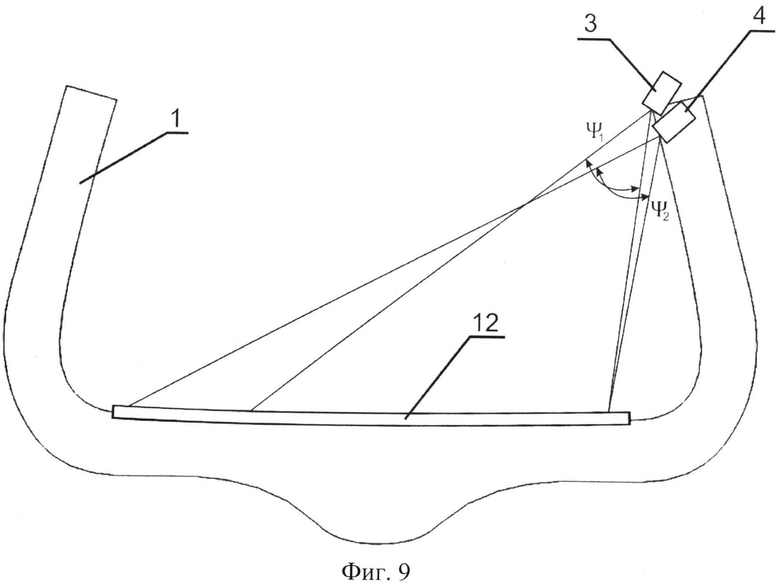
На фиг.9 приведена оптическая схема размещения элементов устройства управления, выполненного в виде штурвала.
Специализированный вычислитель 5 может быть выполнен на базе процессоров, обладающих скоростным каналом связи с цифровыми телевизионными камерами, например типа DM8168 DaVinci или TMS320 ОМАРTM фирмы Texas Instruments. Их программное обеспечение должно осуществлять:
- пороговое обнаружение и фиксацию координат α1 и α2 на фотоприемных матрицах 6 и 7;
- расчет пространственных координат точки, принадлежащей R, согласно формулы 1, возможно модифицированной с учетом сдвига и конвергенции оптических осей телевизионных камер 3 и 4;
- принятие решения о совершении водителем управляющего жеста на основе данных корреляционного приемника, описываемого формулами 2 или 3.
В качестве телевизионных камер могут использоваться миниатюрные цифровые сенсоры, например OVM7690 фирмы OmniVision.
Литература
1. Патент США №4678906 от 7.07.1987 г.
2. Патент США №4772799 от 20.09.1988 г.
3. Патент США №7295904 от 13.11.2007 г.
4. Патент США №6114949 от 5.09.2000 г.
5. Вихрев Л. Легким движением руки... Компоненты и технологии. №5, 2005 г., Санкт-Петербург, Finestreet.
6. Коротаев В.В., Краснящих А.В. Телевизионные измерительные системы. Учебное пособие. Санкт-Петербург, ИТМО, 2008 г. (стр.42).
7. Скляр Бернард. Цифровая связь. Теоретические основы и практическое применение. Второе издание. Москва, С-Петербург, Киев, 2003 г. (стр.206).
8. Справочник конструктора оптико-механических приборов. Под общ. ред. В. А. Панова. Ленинград, Машиностроение, 1980 г.
9. http://www.fiberopticproducts.com/Sideglow.htm
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ БОКОВОГО АВТОМОБИЛЬНОГО СТЕКЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2556734C1 |
| Способ жестового управления и устройство для его реализации | 2021 |
|
RU2777910C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2486575C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ СЕНСОРНОЙ ПЛОСКОСТИ | 2014 |
|
RU2577467C1 |
| СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2013 |
|
RU2542949C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО | 2013 |
|
RU2542947C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ СКОРОСТИ | 2014 |
|
RU2575388C1 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ИНТЕРФЕЙСА С ОБЪЕКТОМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2011 |
|
RU2486608C2 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ТРЕХМЕРНОГО ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА | 2013 |
|
RU2514086C2 |
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОЙ МАНИПУЛЯЦИИ | 2008 |
|
RU2362216C1 |


Изобретения относятся к автомобильной технике. Устройство для управления транспортным средством содержит рулевое колесо, оптический излучатель и оптически сопряженные с ним приемники излучения, подключенные к специализированному вычислителю. Оптические приемники представляют собой цифровые телевизионные камеры, зоной обзора которых является поверхность оптического излучателя. Согласно первому варианту оптический излучатель выполнен в виде полоски, закрепляемой на внутренней поверхности рулевого колеса. Согласно второму варианту устройство содержит второй оптический приемник, при этом приемники представляют собой светодиоды и обеспечивают засветку объектов, попадающих в поля обзора первого и второго оптического приемника. Зоной, в которой может осуществляться распознавание жестов оператора транспортного средства, является пересечение секторов обзора первой и второй телевизионных камер на поверхности оптического излучателя. Появление в этой зоне пальца оператора вызывает пересечение светового потока, формируемого излучателем, и соответственно появление теневых сегментов на изображениях, формируемых первой и второй телевизионными камерами, причем по координатам этих сегментов специализированный вычислитель рассчитывает ряд пространственных положений пальца оператора в последовательные моменты времени и определяет по ним траекторию движения. Достигается расширение функциональных возможностей устройства управления транспортными средствами. 2 н. и 3 з.п. ф-лы, 9 ил.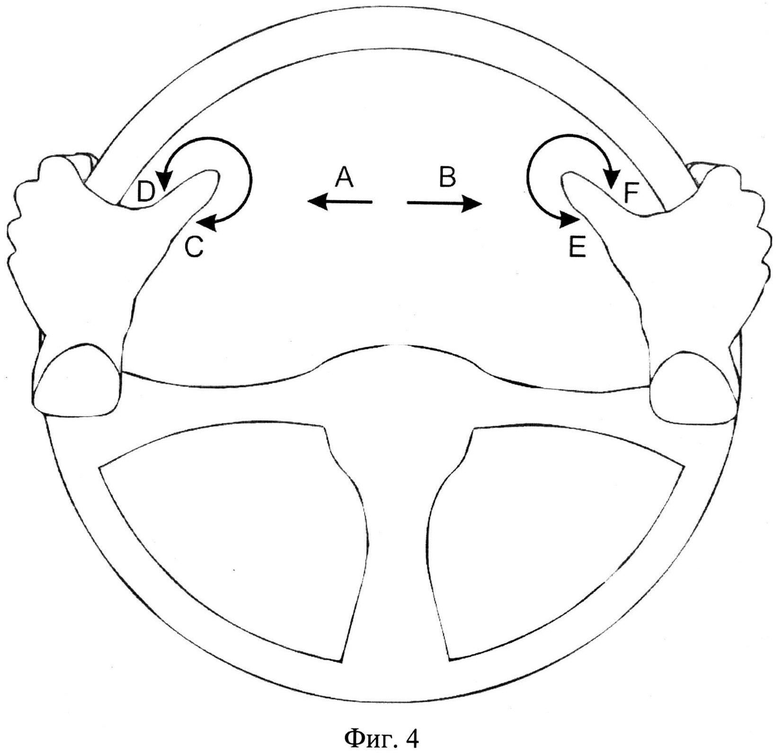
1. Устройство для управления транспортным средством, содержащее рулевое колесо, оптический излучатель и оптически сопряженный с ним приемник излучения, подключенные к специализированному вычислителю, дополнительно содержит второй приемник излучения, оптически сопряженный с излучателем и подключенный к дополнительному входу специализированного вычислителя, причем первый и второй оптические приемники представляют собой цифровые телевизионные камеры, зоной обзора которых является поверхность оптического излучателя, при этом оптический излучатель выполнен в виде полоски, закрепляемой на внутренней поверхности рулевого колеса, а зоной, в которой может осуществляться распознавание жестов оператора транспортного средства, является пересечение секторов обзора первой и второй телевизионных камер на поверхности оптического излучателя, при этом появление в этой зоне пальца оператора вызывает пересечение светового потока, формируемого излучателем, и соответственно появление теневых сегментов на изображениях, формируемых первой и второй телевизионными камерами, причем по координатам этих сегментов специализированный вычислитель рассчитывает ряд пространственных положений пальца оператора в последовательные моменты времени и определяет по ним траекторию движения, которая затем сопоставляется с набором определенных заранее в памяти специализированного вычислителя жестов, и принимается решение о принадлежности этого жеста к одному из них и вырабатывается соответствующая этому жесту команда управления оборудованием транспортного средства.
2. Устройство для управления транспортным средством по п.1, отличающееся тем, что оптический излучатель выполнен в виде светорассеивающего экрана, диффузно пропускающего свет, внешняя поверхность которого направлена в сторону приемников излучения, а внутренняя - в сторону расположенных за ней светоизлучающих диодов.
3. Устройство для управления транспортным средством по п.1, отличающееся тем, что оптический излучатель представляет собой отрезок оптоволокна бокового свечения, излучение которого направлено в сторону приемников излучения, причем, по крайней мере, с одного торца этого оптоволокна размещается оптически связанный с ним светоизлучающий диод.
4. Устройство для управления транспортным средством, содержащее рулевое колесо, установленные на нем оптический излучатель и оптически сопряженный с ним приемник излучения, подключенные к специализированному вычислителю, дополнительно содержит оптически сопряженные второй оптический приемник и второй оптический излучатель, причем первый и второй оптические приемники представляют собой цифровые телевизионные камеры, а первый и второй оптические излучатели представляют собой светодиоды, например, ИК-диапазона и обеспечивают засветку объектов, попадающих в поля обзора первого и второго оптического приемника, причем зоной, в которой может осуществляться распознавание жестов оператора транспортного средства, является пересечение секторов обзора первой и второй телевизионных камер на внутренней поверхности рулевого колеса, при этом появление в этой зоне пальца, пересекающего световые потоки первого и второго излучателя, вызывает его засветку и появление соответствующих сегментов на изображениях, формируемых первой и второй телевизионными камерами, и далее, по координатам этих сегментов, специализированный вычислитель рассчитывает ряд пространственных положений пальца руки в последовательные моменты времени и определяет по ним траекторию его движения, которая затем сопоставляется с набором определенных заранее в памяти специализированного вычислителя жестов, и принимается решение о принадлежности этого жеста к одному из них и вырабатывается соответствующая этому жесту команда управления оборудованием транспортного средства.
5. Устройство для управления транспортным средством для управления транспортным средством по п.4, отличающееся тем, что внутренняя поверхность рулевого колеса содержит светопоглотитель, обращенный в сторону первого и второго излучателей, препятствующий отражению от него световых потоков в сторону оптических приемников.
| US 6703999 B1, 09.03.2004 | |||
| US 2006047386 A1, 02.03.2006 | |||
| US 5288078 A, 22.02.1994 | |||
| ИНТЕРАКТИВНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ ЭКСПЛУАТАЦИИ ИНТЕРАКТИВНОГО УСТРОЙСТВА УПРАВЛЕНИЯ | 2007 |
|
RU2410259C2 |
| US 2008122786 A1, 29.05.2008 | |||

