УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к регулировочному устройству массажного ролика и, в частности, к регулировочному устройству массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, при этом устройство способно перемещать массажный ролик, подходящий для лечения субъекта на основе колебательного метода восстановления подвижности суставов при мануальной терапии, когда применяется массажер для позвоночника.
Описание предшествующего уровня техники
В настоящее время, так как все больше людей работает с цифровым коммуникационным оборудованием, например, компьютером, планшетом или смартфоном, в течение длительного времени, вследствие развития промышленной технологии, усиливаются также заболевания позвоночника. Неудобная поза вызывает мышечно-скелетные повреждения, относящиеся к позвоночнику.
При длительном пребывании в течении жизни в положении наклона вперед верхней части тела, может образоваться деформация позвоночника, например, кифоз.
Когда образуется такая деформация позвоночника, мышцы, выпрямляющие туловище, излишне растягиваются, и поэтому мышцы-разгибатели спины слабеют, и задняя продольная связка позвоночного столба растягивается, что повышает возможность позвоночной грыжи. Такие изменения мышц и связок затрудняют впоследствии сохранение правильных поз.
Чрезмерное искривление назад грудных позвонков, когда тело выпрямляется, вызывает поясничный лордоз, который является аномальной компенсацией, что может вызывать вторичную деформацию позвоночника.
Такая деформация позвоночника увеличивает усилие сдавливания и усилие сдвига между позвоночными суставами, что является важным фактором, который может приводить к боли в пояснице.
Физиотерапия и мануальная терапия нашли широкое применение для лечения упомянутых болезней позвоночника. Мануальная терапия дает желаемые результаты ослабления боли, улучшения кровообращения, коррекции позвоночника, стимуляции суставов, растяжения мышц, расслабления контрагированных тканей вокруг суставов и т.п., при мышечно-скелетных повреждениях, которые вызываются деформацией позвоночника.
В частности, восстановление подвижности позвоночного сустава является одним из распространенных видов мануальной терапии и оказывает влияние на увеличение диапазона подвижности суставов, предотвращение ригидности и ослабление боли.
Данные эффекты основаны на принципах нейрофизиологии. Чувствительный нерв, который получает и передает раздражитель, подводимый к суставу, в центральную нервную систему, относят к четырем типам. Типы 1-3 из четырех типов, которые являются механорецептором, передают ощущение в центральную нервную систему, и тип 4, который является ноцирецептором, передает боль, соответствующую аномальному раздражителю.
Восстановление подвижности суставов создает эффект лечения путем возбуждения механорецептора посредством перемещения суставных капсул вокруг суставов. Все механорецепторы имеют разные характеристики, и поэтому применяются разные методы возбуждения. Волокно типа 1 располагается на поверхностном слое суставной капсулы, воспринимает позу и перемещение и реагирует на продолжительный и медленный раздражитель. Волокно типа 2 воспринимает скорость перемещения и реагирует на короткий и быстрый стимул. Такая реакция механорецепторов подавляет распознавание боли. В частности, в соответствии с предшествующими исследованиями сообщалось, что суставы шейных позвонков содержат множество волокон типа 1, и суставы поясничных позвонков содержат множество волокон типа 2. Передача ощущения механорецепторами влияет на стимуляцию или подавление реакции альфа-мотонейронов, что создает возможность усиления или ослабления мышц. Соответственно, восстановление подвижности суставов вызывает релаксацию мышц и может расширить диапазон подвижности суставов.
При ручной терапии, колебательный метод применяется для восстановления подвижности суставов на основе принципов нейрофизиологии и подразделяется на четыре стадии в зависимости от амплитуды и частоты. Первая стадия колебательного метода выполняется в начальной точке диапазона восстановления подвижности суставов, и амплитуда является небольшой. Вторая стадия колебательного метода выполняется в среднем диапазоне диапазона восстановления подвижности и характеризуется большой амплитудой, с частотой, равной 2-3 колебаниям в секунду. Третья стадия колебательного метода перемещает сустав вплоть до точки сопротивления диапазона восстановления подвижности, амплитуда является большой, и колебания подводятся 2-3 раза в секунду. Четвертая стадия колебательного метода выполняется в ограниченном диапазоне диапазона восстановления подвижности, и амплитуда является небольшой.
Первую стадию и вторую стадию обычно применяют для коррекции боли. Кроме того, третью и четвертую стадии применяют для расширения диапазона восстановления подвижности суставов и растяжения окружающих тканей.
В последнее время разрабатываются различные устройства для стимуляции позвоночного столба, которые применяют массаж для предотвращения и коррекции деформации позвоночника и расширяют диапазон восстановления подвижности суставов позвоночного столба.
Однако, так как устройства для стимуляции позвоночного столба предшествующего уровня техники стимулируют позвоночный столб с использованием одной направляющая, по которой массажные ролики перемещаются вдоль изгиба позвоночного столба, то существует такой недостаток, как трудность обеспечения эффекта сосредоточенного лечения приложением колебательного метода, подходящего для конкретных отделов позвоночного столба.
Корейский патент № 10-1181918 (вертикально подвижное устройство для гипертермического терапевтического устройства) предназначен для создания возможности обеспечения акупрессурного и массажного действия одним и тем же давлением даже для пациентов, имеющих разные клинические состояния, посредством регулировки высоты перемещения вверх вниз нагретого устройства, установленного в мат. Так как высоту нагретого устройства можно регулировать согласно весу пользователей, то получают преимущество в том, что избыточное давление не концентрируется на конкретной части, но при этом сложно получать эффекты восстановления подвижности суставов, которые выбраны для стадий, соответственно, когда ко всем частям позвоночного столба прилагается одинаковое давление. Соответственно, давление, которое является постоянным, может быть слишком сильным для пользователей, которые страдают от болей в суставе, и могут вызываться побочные эффекты и дополнительные боли.
Кроме того, существует ограничение в том, что достаточный эффект трудно получить только давлением, которое является постоянным для пользователей, которые нуждаются в более высоком напряжении и большем времени стимуляции для расширения диапазона восстановления подвижности суставов.
Корейский патент № 10-2031634 (Массажное кресло с регулируемым массажным роликом) предназначен для достижения возможности обеспечения специально подобранного массажа соответственно строениям тел пользователей, поскольку можно регулировать положения массажных роликов и величину силы упругой реакции.
Однако, поскольку к отделам позвоночного столба прилагается обычно только давление, то существует ограничение в том, что трудно обеспечить эффект сосредоточенного лечения при применении колебательного метода на конкретном отделе позвоночного столба.
Список литературы
Патентные документы
Патентный документ 1: Корейский патент № 10-1181918 (5 сентября 2012 г.)
Патентный документ 2: Корейский патент № 10-2031634 (7 сентября 2019 г.)
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для решения вышеприведенных проблем, целью настоящего изобретения является создание регулировочного устройства массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, при этом устройство должно быть в состоянии селективно выполнять восстановление подвижности суставов на каждой стадии в зависимости от болей пользователя и состояния позвоночных суставов, с использованием принципа нейрофизиологии суставов, посредством применения колебательного метода к массажеру для позвоночника и массажным роликам, которые прилагают постоянное давление за счет регулировки высоты нагретого устройства соответственно физическим характеристикам пользователей.
Другой целью настоящего изобретения является создание регулировочного устройства массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, при этом устройство должно быть способно обеспечивать предварительно заданный эффект массажа для всех отделов позвоночного столба с помощью регулируемых массажных роликов.
Другой целью настоящего изобретения является создание регулировочного устройства массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, при этом устройство должно быть способно обеспечивать лечение, специально подобранное в зависимости от состояний пользователей для каждой стадии в соответствии с амплитудой и колебательной скоростью массажных роликов.
Другой целью настоящего изобретения является создание регулировочного устройства массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, при этом устройство должно быть способно обеспечивать надлежащий эффект лечения в зависимости от состояния и потребностей пользователя, с использованием массажных роликов, работающих на основе колебательного метода восстановления подвижности суставов.
Для достижения целей, регулировочное устройство массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, по настоящему изобретению включает в себя блок подачи массажных роликов, который содержит пару подвижных элементов, чтобы двигаться вдоль опорной пластины, массажный узел, обе стороны которого соединены с блоком подачи посредством шарнирных участков, и содержащий массажные ролики, которые колебательно перемещаются вверх вниз, пару опорных скоб, расположенных на обеих сторонах опорной пластины и выполняющих функцию направляющих, в которых установлен и поворачивается подвижный элемент, пару зубчатых реек, расположенных внутри опорных скоб, и ведущую шестерню, соединенную с валиком электродвигателя тянущего электродвигателя и поворачивающуюся на зубчатой рейке, при этом блок подачи массажных роликов с первой стороны соединен с ведущей шестерней и выполнен с возможностью перемещения вдоль изгиба позвоночного столба.
Массажные ролики колебательно перемещаются электродвигателем привода колебаний и воздушной камерой, которая колебательно перемещается вверх вниз электродвигателем привода колебаний.
Массажный узел дополнительно включает в себя устройство регулировки высоты подъема-опускания, которое регулирует высоту подъема-опускания массажных роликов, устройство регулировки амплитуды/скорости колебаний, которое регулирует амплитуду и колебательную скорость массажных роликов, и контроллер, который регулирует высоту подъема-опускания устройства регулировки высоты подъема-опускания и устройство регулировки амплитуды/скорости колебаний на основании входных данных.
Контроллер регулирует устройство регулировки амплитуды/скорости колебаний с использованием колебательного метода коррекции болей для коррекции боли и усовершенствованного колебательного метода коррекции для расширения диапазона восстановления подвижности суставов и растяжения окружающих тканей, при этом колебательный метод коррекции болей включает в себя, в соответствии с амплитудой и скоростью колебаний, колебательный метод первой стадии, который подавляет боль, и колебательный метод второй стадии, который создает эффект ослабления боли и растяжения мышц.
Усовершенствованный колебательный метод коррекции может включать в себя колебательный метод третьей стадии, который перемещает сустав до точки сопротивления диапазона восстановления подвижности, и при котором амплитуда является большой, и колебания вызываются 2-3 раза в секунду, и колебательный метод четвертой стадии, который выполняется в ограниченном диапазоне диапазона восстановления подвижности и характеризуется небольшой амплитудой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
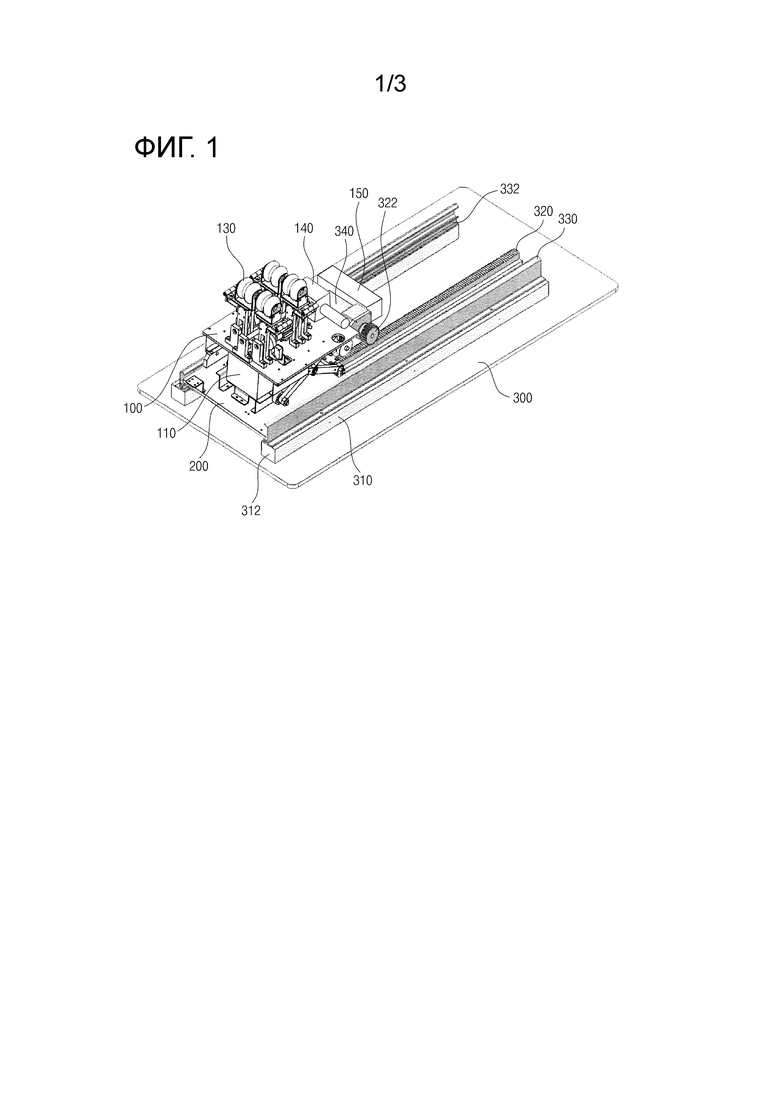
Фиг. 1 - вид в перспективе массажер в соответствии с вариантом осуществления настоящего изобретения;
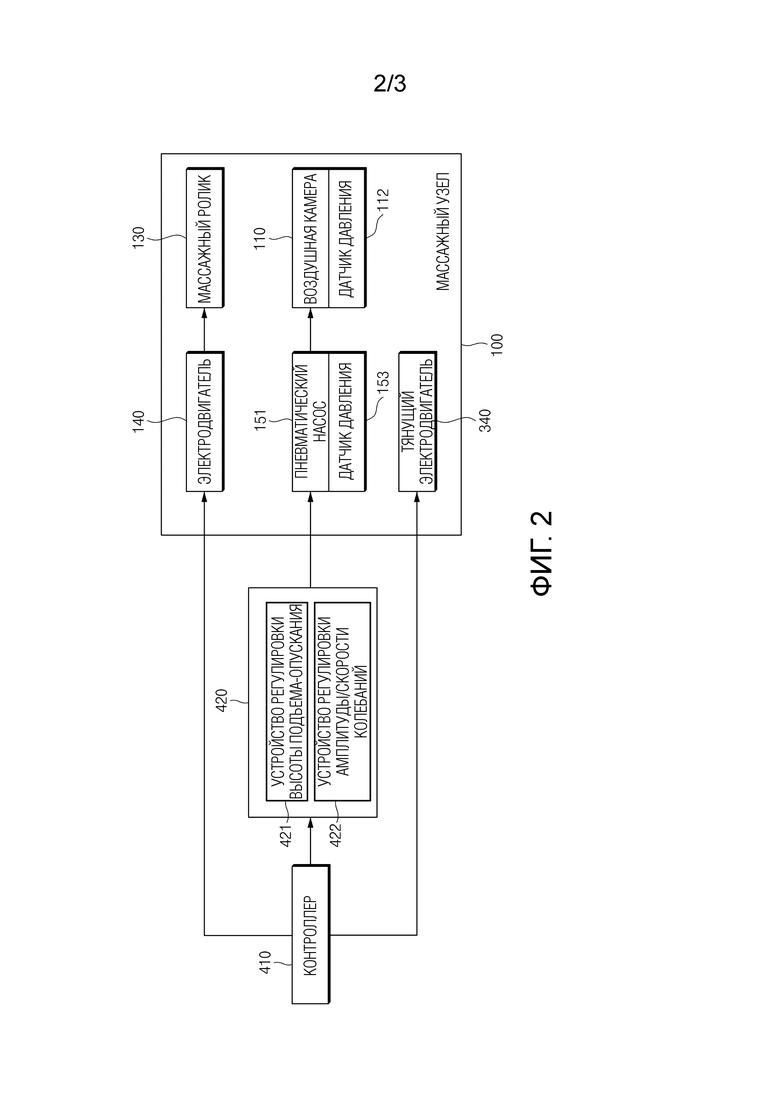
Фиг. 2 - основные компоненты настоящего изобретения;
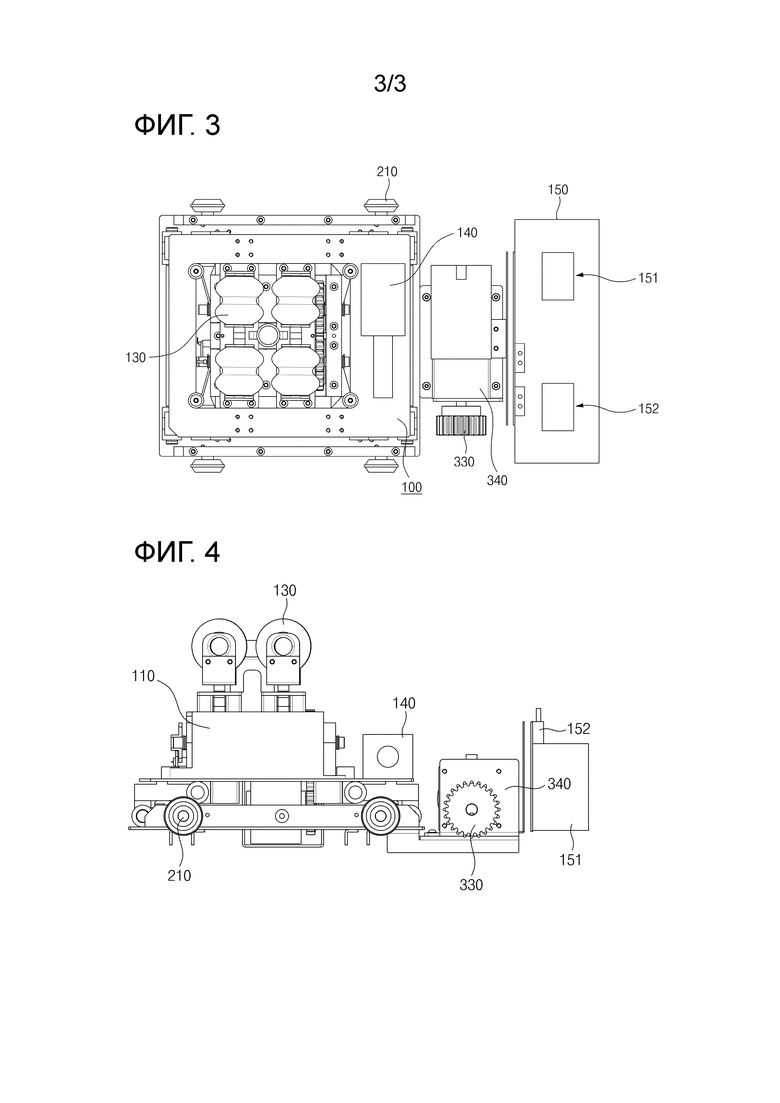
Фиг. 3 - вид в плане, представляющий массажный узел и тянущий электродвигатель; и
Фиг. 4 - вид справа сбоку массажного узла и тянущего электродвигателя.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Термины и формулировки, используемые в настоящем описании и формуле изобретения, нельзя интерпретировать как ограниченные типичными значениями или словарными определениями, а следует интерпретировать как имеющие значения и понятия, релевантные техническому объему настоящего изобретения, исходя из правила, в соответствии с которым автор изобретения может соответственно определять понятие термина для наиболее подходящего описания наилучшего, известного ему способа осуществления изобретения.
В настоящем описании следует понимать, что, если прямо не описано иное, «содержащий» какие-либо компоненты должно подразумевать включение в состав других компонентов, а не исключение любых других компонентов. Кроме того, выражения «часть», «узел», «модуль», «устройство» и тому подобное, означают узел для отработки, по меньшей мере, одной функции или операции, который может быть реализован путем сочетания аппаратных и/или программных средств.
В описании следует понимать, что выражение «и/или» включает в себя всевозможные сочетания из одного или более связанных перечисленных объектов. Например, выражение «первый объект, второй объект и/или третий объект» означает всевозможные сочетания, которые можно представить из двух или более объектов из первого и второго, и третьего объектов.
Далее в настоящем документе, вариант осуществления настоящего изобретения будет описан со ссылкой на прилагаемые чертежи.
Фиг. 1 является видом в перспективе массажера в соответствии с вариантом осуществления настоящего изобретения, фиг. 2 является видом основных компонентов настоящего изобретения, фиг. 3 является видом в плане, представляющим массажный узел и тянущий электродвигатель, и фиг. 4 является видом справа сбоку, представляющим массажный узел и тянущий электродвигатель.
Как показано на фигурах, массажер по настоящему изобретению включает в себя блок 200 подачи массажных роликов, устройство 420 регулировки роликов, которое регулирует перемещение вверх вниз и амплитуду колебания массажных роликов 130, и контроллер 410.
Блок 200 подачи массажных роликов перемещается кремальерой и электродвигателем вдоль изгиба позвоночного столба.
Для этого, блок 200 подачи массажных роликов содержит пару подвижных элементов, чтобы двигаться вдоль опорной пластины 300.
Опорная пластина 300 может быть обычным матом.
Как показано на фигурах, с двух сторон к блоку 200 подачи массажных роликов присоединена, соответственно, пара подвижных элементов 210.
Подвижные элементы 210 имеют форму роликов, установлены на направляющих 332, сформированных на опорных скобах 330, и перемещаются в направляющих 332 путем качения роликов.
Опорные скобы 330 обеспечены, соответственно, на обеих сторонах опорной пластины 300 и содержат направляющие 332, в которых могут быть установлены и могут поворачиваться подвижные элементы 210.
Внутри опорной скобы 330 располагается пара зубчатых реек 320, и в конструкции содержится ведущая шестерня 322, соединенная с валиком электродвигателя тянущего электродвигателя 340 и поворачивающаяся на зубчатой рейке 320.
Опорные скобы 330 выполнены с возможностью опоры на опорные стержни 310, содержащие, каждый, упор 312 сбоку на опорной пластине 300.
С одной стороны блок 200 подачи массажных роликов соединен с тянущим электродвигателем 340 или ведущей шестерней 322, и поэтому массажные ролики перемещаются вдоль изгиба позвоночного столба, при перемещении ведущей шестерни 322.
Массажный узел 100, обе стороны которого соединены с блоком 200 подачи массажных роликов посредством шарнирных участков 220, и который содержит массажные ролики 130, которые колебательно перемещаются вверх вниз, располагается с внутренней стороны каждого из подвижных элементов 210.
Массажный узел 100 колебательно перемещается вверх вниз шарнирным участком 220, когда в блоке 200 подачи массажных роликов приводится в действие воздушная камера 110.
Сторона шарнирного участка 220, которая колебательно перемещается вверх вниз, соединена с блоком 200 подачи массажных роликов, а другая сторона соединена с опорной частью 150 массажного узла 100, вследствие чего колебания пневматического насоса 151 приводят в действие воздушную камеру 110, и поэтому массажный узел 100 совершает колебания.
С этой целью, контроллер 410 в первую очередь управляет массажным узлом 100, чтобы продольно перемещать его на опорной пластине 300 посредством ведущей шестерни 322, которая вращается по зубчатой рейке 320, с использованием тянущего электродвигателя 340, и управляет электродвигателем 140 таким образом, чтобы массажные ролики 130 приводились в движение, перемещаясь вправо-влево.
Чтобы можно было управлять колебаниями массажного узла 100 при посредстве пневматического насоса 151A, предусмотрено устройство 420 регулировки роликов.
Устройство 420 регулировки роликов состоит из устройства 421 регулировки высоты подъема-опускания, которое регулирует высоту колебаний вверх вниз массажных роликов 130, и устройства 422 регулировки амплитуды/скорости колебаний, которое регулирует амплитуду и колебательную скорость колебаний.
Когда устройство 420 регулировки роликов передает комбинацию высоты, амплитуды и колебательной скорости колебаний в пневматический насос 151, в соответствии с набором данных в контроллере 410, пневматический насос 151 управляет колебаниями вверх вниз массажными роликами 130 посредством воздушной камеры 110.
В результате, пневматический насос 151 регулирует высоту и частоту колебаний верхней пластины посредством подачи и прекращения подачи давления в воздушную камеру 110 с использованием воздуха.
Пневматический насос 151 механически соединен с электромагнитным клапаном. Когда воздушная камера 110 колебательно перемещается вверх вниз при сокращении и удлинении электромагнитного клапана 152 по электрическому сигналу, воздушная камера 110 перемещает массажный узел 100 вверх вниз, вследствие чего массажные ролики 130 колебательно перемещаются вверх вниз.
Воздушная камера 110 является воздушной ячейкой для колебаний вверх вниз, поэтому колебаниями вверх вниз можно управлять точнее путем управления воздушной ячейкой посредством пневматического насоса.
Более подробно, массажный ролик колебательно перемещается вверх вниз на высоту колебаний вверх вниз воздушной камеры 110, выдаваемую устройством 420 регулировки роликов по набору данных в контроллере 410, и воздушная камера колебательно перемещается вверх вниз пневматическим насосом 151, и тем самым создается возможность восстановления подвижности позвоночного сустава с применением колебательного метода.
А именно, массажные ролики 130 перемещаются вправо-влево электродвигателем 140, колебательно перемещаются вверх вниз воздушной камерой 110 и перемещаются вдоль позвоночного столба тянущим электродвигателем 340.
Устройство 420 регулировки роликов включает в себя устройство 421 регулировки высоты подъема-опускания, которое регулирует перемещение вверх вниз массажных роликов, и устройство 422 регулировки амплитуды/скорости колебаний, которое регулирует амплитуду и колебательную скорость роликов посредством управления электродвигателями привода колебаний, установленными под массажными роликами.
Когда под воздушной камерой 110 дополнительно обеспечен датчик 112 давления, который воспринимает давление воздуха, и/или на пневматическом насосе 151 дополнительно обеспечен датчик 153 давления, который воспринимает давление воздуха, контроллер 410 определяет предельную точку диапазона восстановления подвижности суставов, когда массажные ролики перемещаются вверх вниз, и колебательный метод применяется на каждой стадии, исходя из предельной точки, и поэтому достигается эффект обеспечения возможности выполнять массаж с большей эффективностью.
Далее приведено описание способа управления регулировочным устройством массажных роликов вышеописанную конфигурацию по настоящему изобретению с использованием контроллера.
Контроллер 410 может быть удаленным контроллером на основе планшетного персонального компьютера.
Контроллер 410 позволяет регулировать давление массажного узла и регулировать амплитуду и колебательную скорость приводного блока для конкретного отдела в соответствии с состоянием позвоночного сустава пользователя, и поэтому может передаваться эффект подходящего колебательного метода на каждой стадии.
В частности, поскольку пользователи имеют разные гибкости и характеристики тканей позвоночных суставов, то желательно, чтобы контроллер 410 устанавливал «стадии оценки», при первоначальном приведении роликов в движение, чтобы определять максимальное значение давления в соответствии с изгибом, гибкостью и перемещением отделов позвоночного столба пользователя.
Затем, исходя из установленного максимального значения давления, давление для каждой ступени определяется следующим образом.
Стадия 1: 10-25% от максимального значения давления.
Стадия 2: 30-50% от максимального значения давления.
Стадия 3: 60-80% от максимального значения давления.
Стадия 4: 90-100% от максимального значения давления.
То есть, контроллер 410 регулирует устройство 422 регулировки амплитуды/скорости колебаний с использованием колебательного метода коррекции болей для коррекции боли и усовершенствованного колебательного метода коррекции для расширения диапазона восстановления подвижности суставов и растяжения окружающих тканей таким образом, чтобы воздушная камера 110 могла поддерживать значение давления и частоту колебаний с помощью пневматического насоса 151.
В данном случае, управление датчиком 112 давления воздушной камеры 110 и/или датчиком 153 давления пневматического насоса 151 осуществляется так, что поддерживается установленное давление.
При выполнении колебательного метода коррекции болей, контроллер 410 приводит в действие устройство 422 регулировки амплитуды/скорости колебаний, чтобы использовать колебательный метод первой стадии, когда подавляется боль в соответствии с амплитудой и колебательной скоростью, и колебательный метод второй стадии, который создает эффект ослабления боли и растяжения мышц.
Колебательный метод первой стадии выполняется в начальной точке диапазона восстановления подвижности суставов и с таким управлением, чтобы амплитуда была небольшой, и колебательный метод второй стадии выполняется в среднем диапазоне диапазона восстановления подвижности и характеризуется большой амплитудой, при этом частота составляет приблизительно 2-3 колебания в секунду.
Усовершенствованный колебательный метод коррекции может включать в себя колебательный метод третьей стадии, который перемещает сустав до точки сопротивления диапазона восстановления подвижности, и при котором амплитуда является большой, и колебания вызываются 2-3 раза в секунду, и колебательный метод четвертой стадии, который выполняется в ограниченном диапазоне диапазона восстановления подвижности и характеризуется небольшой амплитудой.
В данном случае, аналогично, регулировкой давления массажного узла и регулировкой амплитуды и колебательной скорости приводного блока можно управлять для конкретного отдела в соответствии с состоянием позвоночного сустава пользователя, с помощью удаленного контроллера на основе планшетного ПК, и потому может передаваться эффект подходящего колебательного метода в каждой стадии (стадии 1-4).
В зависимости от амплитуды и колебательной скорости для каждой ступени, можно обеспечить эффект подавления боли на первой стадии, эффект ослабления боли и растяжения мышц на второй стадии и эффект расширения диапазона восстановления подвижности суставов на третьей и четвертой стадии, вследствие чего можно специально подбирать лечение в зависимости от состояний пользователей.
Данный колебательный метод является таким же, как в вышеприведенном описании, и поэтому метод подробно не описан.
Поэтому, в соответствии с регулировочным устройством массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, можно передавать селективный эффект восстановления подвижности суставов для каждой стадии, в зависимости от боли и состояния позвоночных суставов пользователя, с использованием принципа нейрофизиологии посредством применения колебательного метода с массажными роликами.
Кроме того, в соответствии с регулировочным устройством массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, эффект лечения можно изменять посредством регулировки амплитуды колебаний и скорости массажных роликов, так что в данном случае, в результате можно применять более эффективное лечение.
Кроме того, в соответствии с регулировочным устройством массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, можно обеспечить эффект подавления боли на первой стадии, эффект ослабления боли и растяжения мышц на второй стадии и эффект расширения диапазона восстановления подвижности суставов на третьей и четвертой стадиях в соответствии с амплитудой и колебательной скоростью, вследствие чего можно специально подбирать лечение в зависимости от состояния пользователей.
Кроме того, в соответствии с регулировочным устройством массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, массажные ролики, работающие на основе колебательного метода для восстановления подвижности суставов, могут обеспечивать надлежащий эффект лечения в зависимости от состояний и потребностей пользователей, так что боль в отделах позвоночника ослабляется, и диапазон восстановления подвижности позвоночного сустава расширяется, вследствие чего пользователь может принимать правильные позы. Кроме того, поскольку можно предотвратить соответствующие заболевания, то имеет место такой эффект, что можно уменьшить нагрузку социальных и экономических затрат.
Хотя настоящее изобретение описано со ссылкой на подробно описанные варианты осуществления, специалистам в данной области техники очевидно, что настоящее изобретение можно изменять и модифицировать различными способами в пределах объема настоящего изобретения, и следует отметить, что изменения и модификации охватываются формулой изобретения.
Изобретение относится к средствам мануальной терапии для восстановления подвижности позвоночного сустава. Представлено регулировочное устройство массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава. При этом данное устройство содержит блок подачи массажных роликов, который содержит пару подвижных элементов, выполненных с возможностью перемещения вдоль опорной пластины, и массажный узел, обе стороны которого соединены с блоком подачи массажных роликов посредством шарнирных участков, причем этот узел содержит массажные ролики, которые колебательно перемещаются вверх вниз с помощью колебательно перемещаемой вверх вниз пневматическим насосом воздушной камеры на высоту колебаний вверх вниз этой камеры, выдаваемую устройством для регулировки роликов по набору входных данных в контроллере, который на основании этих данных регулирует высоту подъема-опускания устройства регулировки высоты подъема-опускания, и устройство регулировки амплитуды/скорости колебаний. Достигается эффект сосредоточенного лечения при применении колебательного метода на конкретном отделе позвоночного столба. 7 з.п. ф-лы, 4 ил.
1. Регулировочное устройство массажного ролика, работающего на основе колебательного метода для восстановления подвижности позвоночного сустава, при этом регулировочное устройство содержит:
блок подачи массажных роликов, который содержит пару подвижных элементов, выполненных с возможностью перемещения вдоль опорной пластины; и
массажный узел, обе стороны которого соединены с блоком подачи массажных роликов посредством шарнирных участков и содержащий массажные ролики, которые колебательно перемещаются вверх вниз с помощью колебательно перемещаемой вверх вниз пневматическим насосом воздушной камеры на высоту колебаний вверх вниз этой камеры, выдаваемую устройством для регулировки роликов по набору входных данных в контроллере, который на основании этих данных регулирует высоту подъема-опускания устройства регулировки высоты подъема-опускания, и устройство регулировки амплитуды/скорости колебаний.
2. Регулировочное устройство по п. 1, содержащее:
пару опорных скоб, расположенных на обеих сторонах опорной пластины и выполняющих функцию направляющих, в которых установлен и поворачивается подвижный элемент;
пару зубчатых реек, расположенных внутри опорных скоб; и
ведущую шестерню, соединенную с валиком электродвигателя тянущего электродвигателя и поворачивающуюся на зубчатой рейке,
при этом блок подачи массажных роликов с первой стороны соединен с ведущей шестерней, посредством которой перемещается вдоль изгиба позвоночного столба.
3. Регулировочное устройство по п. 2, в котором опорная скоба опирается на опорный стержень, содержащий упор с первой стороны на опорной пластине.
4. Регулировочное устройство по п. 1, в котором массажный узел содержит:
устройство регулировки высоты подъема-опускания, которое регулирует высоту подъема-опускания массажных роликов;
устройство регулировки амплитуды/скорости колебаний, которое регулирует амплитуду и колебательную скорость массажных роликов.
5. Регулировочное устройство по п. 1, в котором контроллер регулирует устройство регулировки амплитуды/скорости колебаний с использованием колебательного метода коррекции болей для коррекции боли и усовершенствованного колебательного метода коррекции для расширения диапазона восстановления подвижности суставов и растяжения окружающих тканей.
6. Регулировочное устройство по п. 5, в котором колебательный метод коррекции болей включает в себя колебательный метод первой стадии, который подавляет боль в соответствии с амплитудой и колебательной скоростью, и колебательный метод второй стадии, который создает эффект ослабления боли и растяжения мышц.
7. Регулировочное устройство по п. 6, в котором колебательный метод первой стадии осуществляют в начальной точке диапазона восстановления подвижности суставов и с таким управлением, чтобы частота составляла 2-3 колебания в секунду.
8. Регулировочное устройство по п. 5, в котором усовершенствованный колебательный метод коррекции содержит колебательный метод третьей стадии, который перемещает сустав до точки сопротивления диапазона восстановления подвижности и при котором колебания вызываются 2-3 раза в секунду, и колебательный метод четвертой стадии.
| KR 102031634 B1, 14.10.2019 | |||
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2007 |
|
RU2336069C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОГО МАССАЖА ПОЗВОНОЧНИКА | 2013 |
|
RU2549674C1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| US 9132055 B1, 15.09.2015 | |||
| US 9474680 B2, 25.09.2016 | |||
| CN 208598750 U, 15.03.2019. | |||

