Изобретение относится к устройствам на основе пьезоматериалов, а именно к пьезоэлектрическим актюаторам изгибного типа, и предназначено для использования в электронике, управляемой оптике, микромеханике, медицине, аэрокосмической технике, в частности при изготовлении пьезоэлектрического привода закрылка лопасти воздушного винта винтокрылого летательного аппарата.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является пьезоактюатор изгибного типа [патент RU № 2819557, 21.05.2024г.], характеризующийся тем, что представляет собой упругий стержень с начальным радиусом кривизны в продольной плоскости, выполненный с возможностью управляемого пьезоэлектрического изменения формы его поперечного сечения при подключении к выходам его электродов управляющего электрического напряжения, обеспечивая рабочий ход - изгиб пьезоактюатора в продольной плоскости. Данное устройство принято за прототип.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения, - пьезоактюатор изгибного типа представляет собой упругий стержень с начальным радиусом кривизны в продольной плоскости, выполненный с возможностью управляемого пьезоэлектрического изменения формы его поперечного сечения при подключении к выходам его электродов управляющего электрического напряжения, обеспечивая рабочий ход - изгиб пьезоактюатора в продольной плоскости.
Недостатками известного устройства, принятого за прототип, являются малая чувствительность (отношение величины изгибных деформаций пьезоактюатора к величине приложенного управляющего электрического напряжения) и малый диапазон управляемых изгибных деформаций в виде прогибов.
Задачей, на решение которой направлено изобретение, является создание пьезоактюатора изгибного типа с увеличенными чувствительностью и диапазоном управляемых изгибныых деформаций.
Поставленная задача была решена за счет того, что известный пьезоактюатор изгибного типа, характеризующийся тем, что представляет собой упругий стержень с начальным радиусом кривизны в продольной плоскости, выполненный с возможностью управляемого пьезоэлектрического изменения формы его поперечного сечения при подключении к выходам его электродов управляющего электрического напряжения, обеспечивая рабочий ход - изгиб пьезоактюатора в продольной плоскости, согласно изобретению включает в себя ленточный пьезоэлектрический слой поджатия - пьезоактюатор осевых (по своей ширине) перемещений, который примыкает к внешней поверхности или встроен внутрь стержня и присоединен к стержню лишь своими протяженными продольными криволинейными сторонами внешнего контура, с возможностью осуществления управляемого растяжения/сжатия сечения стержня по своей ширине и, как следствие, изменения формы его поперечного сечения и, как результат, изменения радиуса кривизны стержня в продольной плоскости при подключении к выходам электродов управляющего электрического напряжения.
Упругий стержень с начальным радиусом кривизны в продольной плоскости может быть выполнен из упругого материала без пьезоэффекта или по типу пьезоэлектрического биморфа изгибного типа.
Пьезоэлектрический слой поджатия может быть выполнен в виде пленочного композитного MFC-акюатора со встречно-штыревыми электродами.
Упругий однослойный стержень и пьезоэлектрический слой поджатия могут иметь прямоугольное составное сечение, которое трансформируется в выпуклую «арочную» форму при подключении к выходам электродов управляющего электрического напряжения.
Упругий двухслойный стержень и пьезоэлектрический слой поджатия, размещенный между слоями стержня, могут иметь прямоугольное составное сечение, которое трансформируется в двояковыпуклую «чечевичную» форму при подключении к выходам электродов управляющего электрического напряжения.
Упругий полый стержень с кольцевым эллиптическим сечением и пьезоэлектрический слой поджатия, размещенный по главной оси эллиптического сечения, в целом, могут иметь Θ-образное составное поперечное сечение, отношение главных полуосей эллиптического сечения изменяется при подключении к выходам электродов управляющего электрического напряжения.
Признаки заявляемого технического решения, отличительные от прототипа, - включает в себя ленточный пьезоэлектрический слой поджатия - пьезоактюатор осевых (по своей ширине) перемещений, который примыкает к внешней поверхности или встроен внутрь стержня и присоединен к стержню лишь своими протяженными продольными криволинейными сторонами внешнего контура, с возможностью осуществления управляемого растяжения/сжатия сечения стержня по своей ширине и, как следствие, изменения формы его поперечного сечения и, как результат, изменения радиуса кривизны стержня в продольной плоскости при подключении к выходам электродов управляющего электрического напряжения; упругий стержень с начальным радиусом кривизны в продольной плоскости выполнен из упругого материала без пьезоэффекта или по типу пьезоэлектрического биморфа изгибного типа; пьезоэлектрический слой поджатия выполнен в виде пленочного композитного MFC-акюатора со встречно-штыревыми электродами; упругий однослойный стержень и пьезоэлектрический слой поджатия имеют прямоугольное составное сечение, которое трансформируется в выпуклую «арочную» форму при подключении к выходам электродов управляющего электрического напряжения; упругий двухслойный стержень и пьезоэлектрический слой поджатия, размещенный между слоями стержня, имеют прямоугольное составное сечение, которое трансформируется в двояковыпуклую «чечевичную» форму при подключении к выходам электродов управляющего электрического напряжения; упругий полый стержень с кольцевым эллиптическим сечением и пьезоэлектрический слой поджатия, размещенный по главной оси эллиптического сечения, в целом, имеют Θ-образное составное поперечное сечение, отношение главных полуосей эллиптического сечения изменяется при подключении к выходам электродов управляющего электрического напряжения.
Отличительные признаки, в совокупности с известными, позволяют увеличить чувствительность и диапазон управляемых изгибных деформаций пьезоактюатора.
Заявителю неизвестно использование в науке и технике отличительных признаков заявленного пьезоактюатора изгибного типа с получением указанного технического результата.
Предлагаемый пьезоактюатор изгибного типа иллюстрируется чертежами, представленными на фиг.1 - фиг.6.
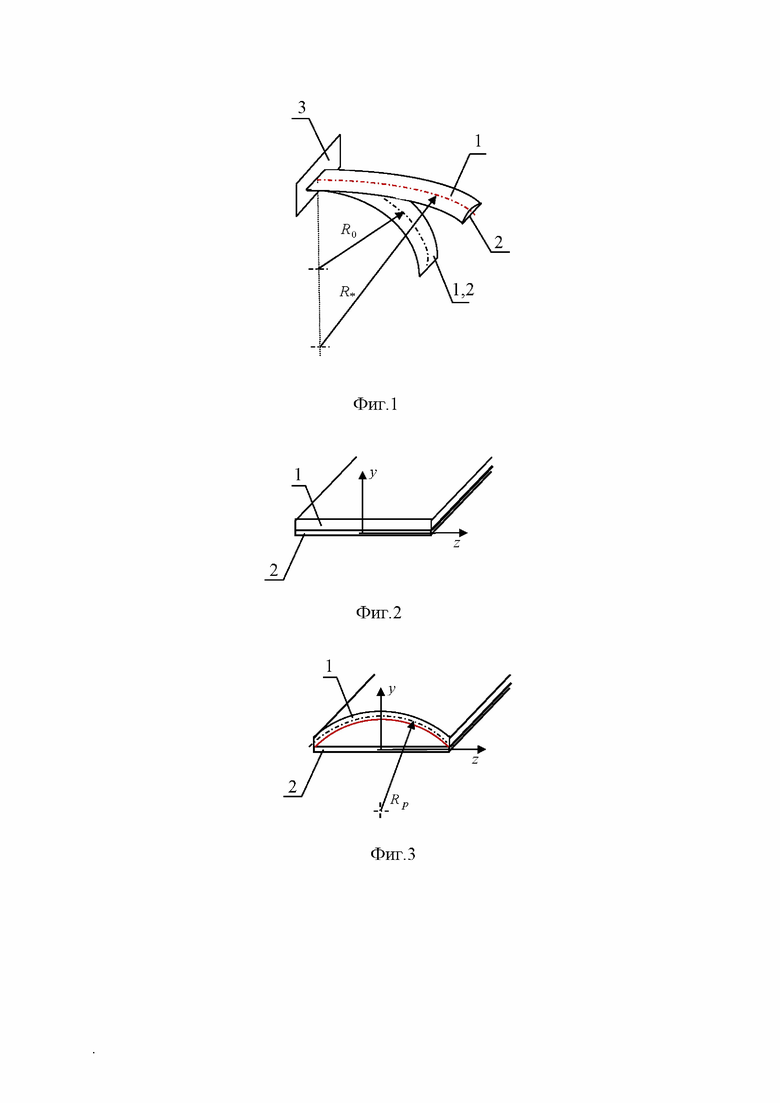
На фиг.1 изображены начальное и деформированное состояния пьезоактюатора изгибного типа в виде упругого стержня, дополненного пьезоэлектрическим слоем поджатия, с начальным радиусом кривизны в продольной плоскости.
На фиг.2 изображено начальное взаимное расположение упругого однослойного стержня и пьезоэлектрического слоя поджатия пьезоактюатора с прямоугольным двухслойным составным поперечным сечением.
На фиг.3 изображен вид трансформированного к выпуклой «арочной» форме двухслойного составного поперечного сечения пьезоактюатора (см. фиг.1) при подключении к выходам электродов управляющего электрического напряжения.
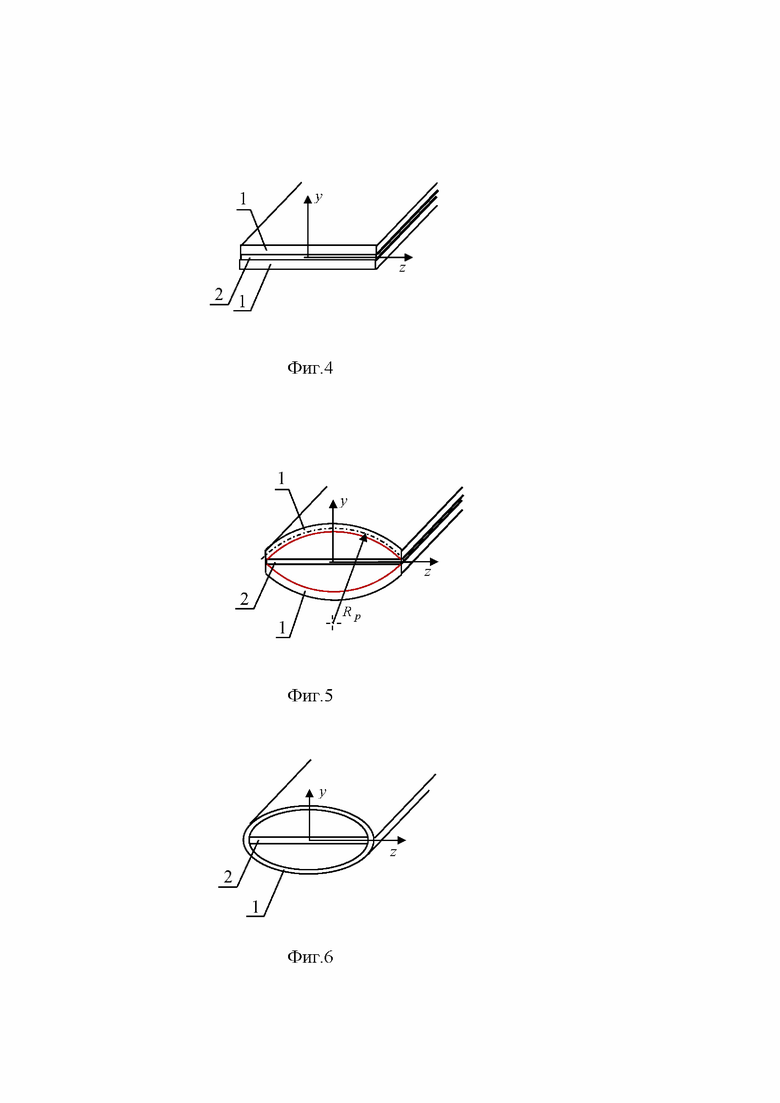
На фиг.4 изображено начальное взаимное расположение двух слоев упругого двухслойного стержня и пьезоэлектрического слоя поджатия между ними для пьезоактюатора с прямоугольным трехслойным составным поперечным сечением.
На фиг.5 изображен вид трансформированного к двояковыпуклой «чечевичной» форме трехслойного составного поперечного сечения пьезоактюатора (см. фиг.3) при подключении к выходам электродов управляющего электрического напряжения.
На фиг.6 изображено Θ-образное составное поперечное сечение пьезоактюатора при расположении пьезоэлектрического слоя поджатия на главной оси внутри упругого полого стержня с эллиптическим сечением; отношение главных полуосей эллиптического Θ-образного составного поперечного сечения изменяется при подключении к выходам электродов управляющего электрического напряжения.
Пьезоактюатор изгибного типа (фиг.1) представляет собой упругий стержень 1, дополненный ленточным пьезоэлектрическим слоем поджатия 2, с начальным радиусом кривизны R0 в продольной плоскости xy, рабочий ход - изгиб пьезоактюатора в продольной плоскости xy (с переходом к результирующему радиусу кривизны R*) осуществляется как реакция на управляемое пьезоэлектрическое изменение формы (т.е. появление кривизны радиусом Rp) его поперечного сечения (фиг.2 - фиг.5) при подключении к выходам его электродов управляющего электрического напряжения Ucon, например, при консольном закреплении 3 пьезоактюатора.
Пьезоэлектрический слой поджатия 2 является пьезоактюатором с возможностью осуществления управляемых осевых перемещений вдоль своей ширины при подключении к выходам электродов пьезоактюатора управляющего электрического напряжения Ucon.
Пьезоэлектрический слой поджатия 2 примыкает к внешней поверхности (фиг.2) или встроен внутрь (фиг.4, фиг.6) упругого стержня 1 и присоединен к стержню по всей длине лишь своими протяженными продольными криволинейными сторонами внешнего контура.
Упругий стержень 1 может быть выполнен в виде цилиндрической однослойной (фиг.2) или двухслойной (фиг.4) пластины с начальным радиусом кривизны R0 в продольной плоскости xy и прямоугольным (в начальном состоянии) поперечным сечением; пьезоэлектрический слой поджатия 2 имеет прямоугольное поперечное сечение и ширину, равную ширине стержня 1.
Пьезоэлектрический слой поджатия 2 примыкает своей цилиндрической поверхностью (фиг.2) или обеими (фиг.4) цилиндрическими поверхностями соответственно к поверхности однослойного стержня 1 (фиг.1) или поверхностям слоев двухслойного стержня 1, между которыми пьезоэлектрический слой поджатия 2 размещен (фиг.4).
Пьезоэлектрический слой поджатия 2 и слой (фиг.2, фиг.3) или слои (фиг.4, фиг.5) стержня 1 соединены между собой лишь своими протяженными продольными криволинейными (левой и правой, см. фиг.2 - фиг.5) сторонами внешнего контура соприкасающихся (в начальном состоянии, см. фиг.2, фиг.4) криволинейных цилиндрических поверхностей.
Пьезоэлектрический слой поджатия 2 осуществляет управляемое сжатие составного сечения пьезоактюатора по ширине в поперечном направлении z и, как следствие, управляемое изменение формы его составного поперечного сечения (фиг.3, фиг.5), т.е. возникновения кривизны 1/Rp для деформированного состояния однослойного стержня 1 (фиг.3) или различных по знаку кривизн ±1/Rp для деформированных состояний слоев двухслойног стержня 1 (фиг.5) в поперечной плоскости yz при подключении к электродам управляющего электрического напряжения Ucon.
Упругий стержень 1 может быть выполнен в виде упругого полого стержня с эллиптическим сечением (фиг.6) при расположении пьезоэлектрического слоя поджатия 2 на его главной оси; отношение главных полуосей эллиптического Θ-образного составного поперечного сечения пьезоактюатора изменяется при подключении к выходам электродов управляющего электрического напряжения.
Пьезоэлектрический слой поджатия 2 представляет собой актюатор осевых перемещений по оси z, например, в виде однородной пьезоэлектрической пластины с поверхностными электродами или в виде пленочного композитного MFC-акюатора со встречно-штыревыми электродами (структура и электроды слоя поджатия 2 на фиг.1 - фиг.6 не изображены) с выходами для подключения управляющего электрического напряжения Ucon.
В пьезоактюаторе слой (фиг.2, фиг.3), слои (фиг.4, фиг.5) или эллиптическая оболочка (фиг.6) упругого стержня 1 могут быть выполнены из упругого материала без пьезоэффекта или по типу пьезоэлектрического биморфа изгибного типа, например, с использованием известных актюаторов [Никифоров В.Г., Климашин В.М., Сафронов А.Я. Биморфные пьезоэлектрические элементы: актюаторы и датчики // Компоненты и технологии. - 2003. - № 4. - С.46-48], в частности, MFC-акюаторов.
Устройство работает следующим образом.
Работа пьезоактюатора основана на выявленном эффекте влияния управляемых вариаций геометрической формы его поперечного сечения на переход к его новым равновесным изгибным рабочим формам при наличии у пьезоактюатора начальной кривизны в продольной плоскости.
При подключении управляющего электрического напряжения Ucon к выходам электродов пьезоактюатора, в частности, его пьезоэлектрического слоя поджатия 2 - актюатора осевых перемещений по оси z происходит пьезоэлектрическое сжатие на величину Δb пьезоэлектрического слоя поджатия 2 по своей ширине с деформацией сжатия εz = Δb/b0 ≈ kUcon, где коэффициент пропорциональности k - пьезоэлектрическая константа, b0 - начальная ширина слоя и пьезоактюатора в целом.
Сжимаясь по ширине, пьезоэлектрический слой поджатия 2 сжимает по своей ширине связанный с ним лишь внешним контуром (т.е. «концами» слоев составного поперечного сечения пьезоактюатора) слой (фиг.2, фиг.3) или слои (фиг.4, фиг.5) стержня 1, в частности, из упругого материала без пьезоэффекта, которые в результате деформирования - «внецентренного сжатия» принимают изогнутый «арочный» (фиг.3) или двояковыпуклый «чечевичный» (фиг.5) вид соответственно.
Выполнение слоя (фиг.2) или слоев (фиг.4) стержня 1 по типу пьезоэлектрического биморфа изгибного типа усиливает изгиб (т.е. кривизну ±1/Rp) слоя (фиг.3) или слоев (фиг.5) стержня 1 при подключении управляющего электрического напряжения Ucon к выходам электродов пьезоактюатора.
В результате, при подключении управляющего электрического напряжения Ucon к выходам электродов пьезоактюатора происходит трансформация составного поперечного сечения пьезоактюатора с прямоугольной формы (фиг.2, фиг.4) на выпуклый «арочный» (фиг.3) или двояковыпуклый трубчатый «чечевичный» (фиг.5) профиль, что обуславливает (при наличии начальной продольной кривизны 1/R0, где R0 - начальный радиус продольной оси пьезоактюатора) появление неуравновешенного реактивного изгибающего момента Mz*, который обуславливает частичное разгибание пьезоактюатора в продольной плоскости xy, т.е. происходит увеличение его радиуса кривизны с начального R0 до результирующего значения R* (фиг.1).
Проведенный численный эксперимент по разработанной численно-аналитической модели функционирования предложенного пьезоактюатора изгибного типа в виде консольно-закрепленного дугообразного пластинчатого (фиг.2 - фиг.5) и трубчатого (фиг.6) составного стержня пьезоактюатора (фиг.1) с различными поперечными сечениями (фиг.2 - фиг.6) выявил эффективность использования пьезоэлектрического слоя поджатия 2, при этом наиболее существенно этот эффект - увеличение чувствительности и диапазона реализуемых изгибных деформаций (прогибов) пьезоактюатора проявляется для случая «чечевичной» формы (фиг.5) трансформированного поперечного сечения.
Таким образом, предложенное техническое решение позволяет значительно повысить эффективность пьезоактюатора, т.е. увеличить чувствительность и диапазон управляемых изгибных деформаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2822976C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПЬЕЗОЧУВСТВИТЕЛЬНОСТИ БИМОРФА ИЗГИБНОГО ТИПА | 2022 |
|
RU2778161C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ БИМОРФ ИЗГИБНОГО ТИПА | 2022 |
|
RU2793564C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2019 |
|
RU2723567C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| ВНУТРИТРУБНЫЙ УПРУГИЙ МИКРОРОБОТ С УПРАВЛЯЕМОЙ ПЬЕЗОАКТЮАТОРОМ ФОРМОЙ | 2018 |
|
RU2690258C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2811499C1 |
Использование: для изготовления пьезоэлектрических актюаторов изгибного типа. Сущность изобретения заключается в том, что пьезоактюатор изгибного типа представляет собой упругий стержень с начальным радиусом кривизны в продольной плоскости, выполненный с возможностью управляемого пьезоэлектрического изменения формы его поперечного сечения при подключении к выходам его электродов управляющего электрического напряжения, обеспечивая рабочий ход - изгиб пьезоактюатора в продольной плоскости, при этом включает в себя ленточный пьезоэлектрический слой поджатия - пьезоактюатор осевых перемещений, который примыкает к внешней поверхности или встроен внутрь стержня и присоединен к стержню лишь своими протяженными продольными криволинейными сторонами внешнего контура, с возможностью осуществления управляемого растяжения/сжатия сечения стержня по своей ширине. Технический результат: обеспечение возможности увеличения чувствительности и диапазона управляемых изгибных деформаций. 5 з.п. ф-лы, 6 ил.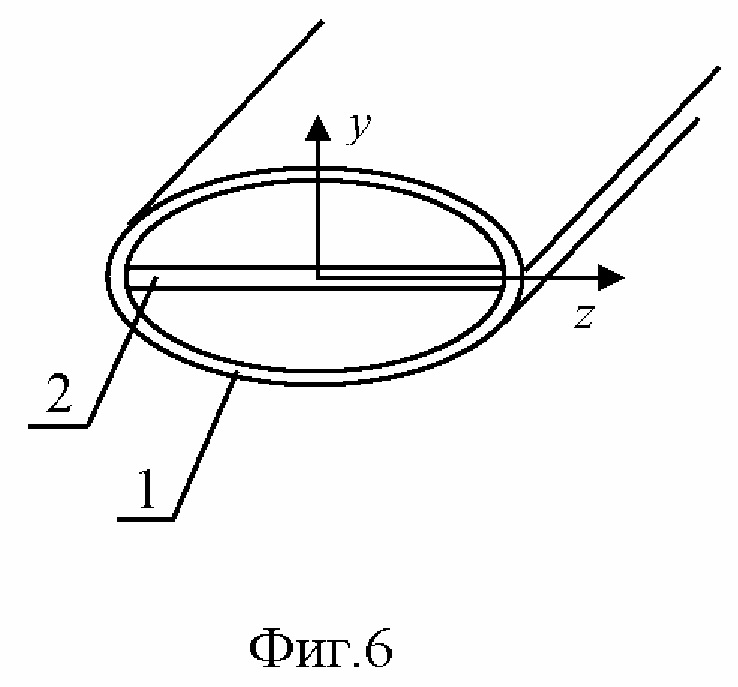
1. Пьезоактюатор изгибного типа, характеризующийся тем, что представляет собой упругий стержень с начальным радиусом кривизны в продольной плоскости, выполненный с возможностью управляемого пьезоэлектрического изменения формы его поперечного сечения при подключении к выходам его электродов управляющего электрического напряжения, обеспечивая рабочий ход - изгиб пьезоактюатора в продольной плоскости, отличающийся тем, что включает в себя ленточный пьезоэлектрический слой поджатия - пьезоактюатор осевых перемещений, который примыкает к внешней поверхности или встроен внутрь стержня и присоединен к стержню лишь своими протяженными продольными криволинейными сторонами внешнего контура, с возможностью осуществления управляемого растяжения/сжатия сечения стержня по своей ширине и, как следствие, изменения формы его поперечного сечения, и, как результат, изменения радиуса кривизны стержня в продольной плоскости при подключении к выходам электродов управляющего электрического напряжения.
2. Пьезоактюатор по п.1, отличающийся тем, что упругий стержень с начальным радиусом кривизны в продольной плоскости выполнен из упругого материала без пьезоэффекта или по типу пьезоэлектрического биморфа изгибного типа.
3. Пьезоактюатор по п.1, отличающийся тем, что пьезоэлектрический слой поджатия выполнен в виде пленочного композитного MFC-акюатора со встречно-штыревыми электродами.
4. Пьезоактюатор по п.1, отличающийся тем, что упругий однослойный стержень и пьезоэлектрический слой поджатия имеют прямоугольное составное сечение, которое трансформируется в выпуклую «арочную» форму при подключении к выходам электродов управляющего электрического напряжения.
5. Пьезоактюатор по п.1, отличающийся тем, что упругий двухслойный стержень и пьезоэлектрический слой поджатия, размещенный между слоями стержня, имеют прямоугольное составное сечение, которое трансформируется в двояковыпуклую «чечевичную» форму при подключении к выходам электродов управляющего электрического напряжения.
6. Пьезоактюатор по п.1, отличающийся тем, что упругий полый стержень с кольцевым эллиптическим сечением и пьезоэлектрический слой поджатия, размещенный по главной оси эллиптического сечения, в целом, имеют Θ-образное составное поперечное сечение, отношение главных полуосей эллиптического сечения изменяется при подключении к выходам электродов управляющего электрического напряжения.
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
| US 20190191582 A1, 20.06.2019 | |||
| US 20120201970 A1, 09.08.2012 | |||
| US 3816774 A1, 11.06.1974 | |||
| US 6781285 B1, 24.08.2004. | |||

