Изобретение относится к области машиностроения и может быть использовано на транспорте.
Хорошо известна цепная передача со звеньями большого размера, в которой обеспечивается движение звеньев, но скорость движения цепи переменна. Целью изобретения является обеспечение постоянной скорости движения цепи и возможность ее использования для перемещения грузов на большие расстояния.
Цепная передача с подвижными звеньями изменяемой длины, состоящая из соединительных и подвижных звеньев, отличающаяся тем, что соединительные звенья содержат два штыря, один из которых вставляется в направляющий профиль, а второй служит для прикрепления внешних устройств, содержат две втулки для дополнительных осей соседних подвижных звеньев, а контактную поверхность подвижно взаимодействует с контактной поверхностью спиц звездочек, что обеспечивает согласование прямолинейного и вращательного движения, а подвижные звенья могут изменять свою длину и содержат дополнительную ось, которая вставляется во втулку соединительного звена, а внешние устройства открепляются от соединительного звена одной цепной передачи и прикрепляются к звену другой цепной передачи по мере их движения, а сами цепные передачи могут быть расположены так, что изменится направление движения.
На фиг. 1 рассматривается движение точки. На фиг. 2 изображена схема начального расположения звеньев. На фиг. 3 изображена общая схема. На фиг. 4, фиг. 5, фиг. 6 изображено подвижное звено. На фиг. 7 и фиг. 8 показаны оба звена в собранном виде. На фиг. 9 показано взаимодействие контактных поверхностей. На фиг. 10, фиг. 11 и фиг. 12 показано сцепление с внешним устройством, на фиг. 13 показано расположение секций в момент перехода внешнего устройства от одной секции к другой, на фиг. 14 представлена схема расположения звеньев цепи при повороте звездочки на угол φ, на фиг. 15 показан график изменения длины подвижного звена по отношению к стандартной длине при смене вида движения и при изменении направления движения цепи внутри секции, на фиг. 16 показано взаимное положение крепления внешнего устройства и подвижных звеньев, на фиг. 17 показана схема изменения длины подвижного звена при изменении направления движения цепи.
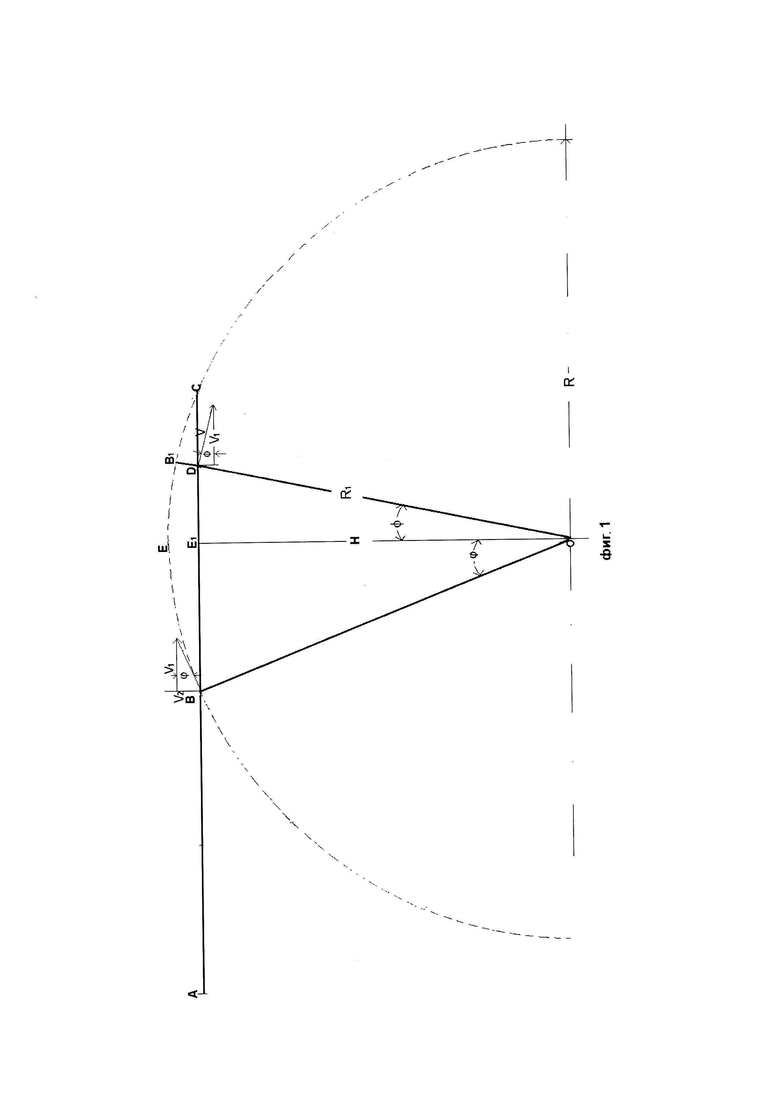
На фиг. 1 изображена схема, на которой рассматривается движение точки D вдоль линии ВС при вращении спицы ОВ, с которой точка D подвижно связана со спицей и может двигаться вдоль нее. Пусть угловая скорость вращения звездочки равна Ω. Скорость движения точки D равна V=Ω⋅R1, где R1 расстояние от центра вращения до точки D. Горизонтальная составляющая скорости V равна V1=Ω⋅R1⋅cos(φ), где φ угол наклона спицы. R1⋅cos(φ)=H, где расстояние Н от центра звездочки до линии ВС и не зависит от φ. Поэтому V1=Ω⋅H, значит, V1 постоянна при движении по линии ВС. Если точка D имела такую же скорость при движении на отрезке АВ, то скорость на всем отрезке АС постоянна.
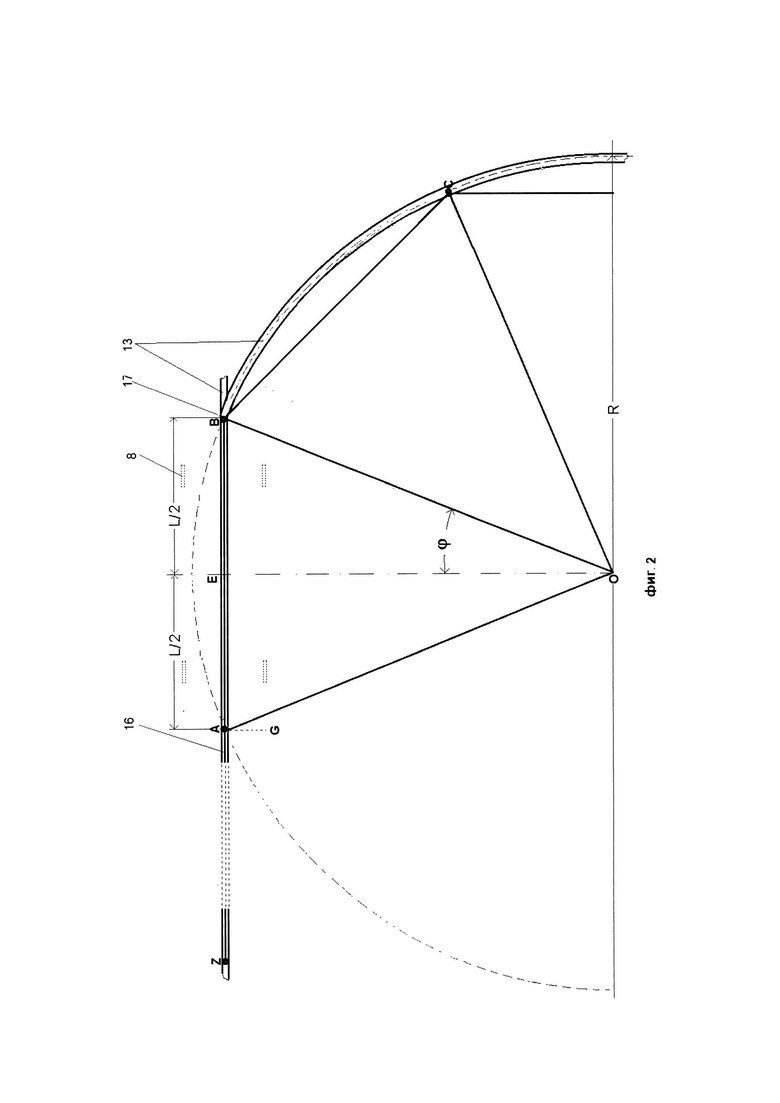
Рассматривается цепная передача содержащая ведущую, ведомую звездочку, элементы самой цепи и все что связанно с ними. Все это вместе можно определить как единичную секцию обеспечивающая движение потоков внешних устройств в двух направлениях. На фиг. 2 изображена схема части секции показывающую расположения звеньев цепной передачи в тот момент, когда звено АВ переходит от поступательного движения к вращательному. В точках А, В, С, Z расположены соединительные звенья 17. Отрезки АВ, ВС, ZA это подвижные звенья 16. ОВ, ОС, OA это спицы 4 подвижно связанные с соединительными звеньями. Пунктиром показано расположение колес 8 внешнего устройства. На схеме видно, что если колеса 8 имеют крепление к внешнему устройству, как показано на фиг. 16, то цепь может располагаться под внешнем устройством над колесами. Показан профиль 13, который обеспечивает направление движение подвижного звена. Угловое расстояние между спицами равно 2⋅ϕ, где ϕ на рисунках принято равным 22,5 градусам. Стандартная, это и максимальная длинна подвижного звена цепи L=2⋅sun(ϕ)⋅R, где R длина спицы от центра звездочки до соединительного звена при его вращении.
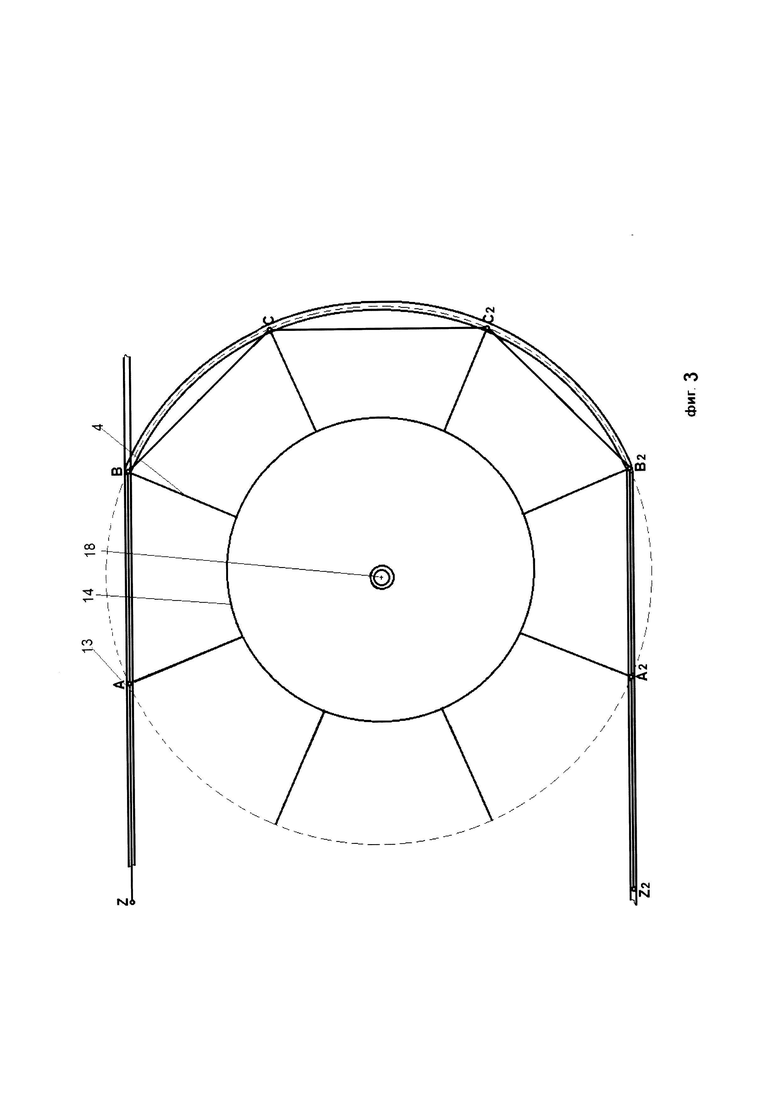
На фиг. 3 показана общая схема расположения спиц и звеньев при вращении звездочки. Показана звездочка 14, которая вращается вокруг оси 18. К звездочке 14 прикреплены спицы 4.
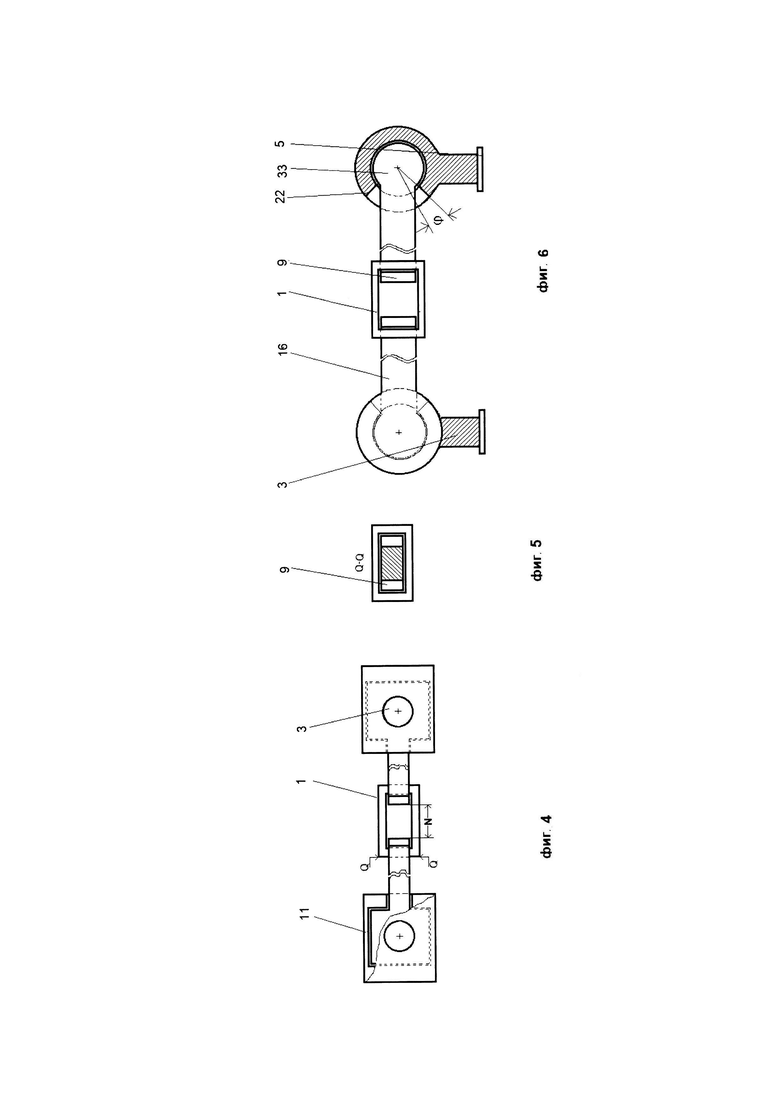
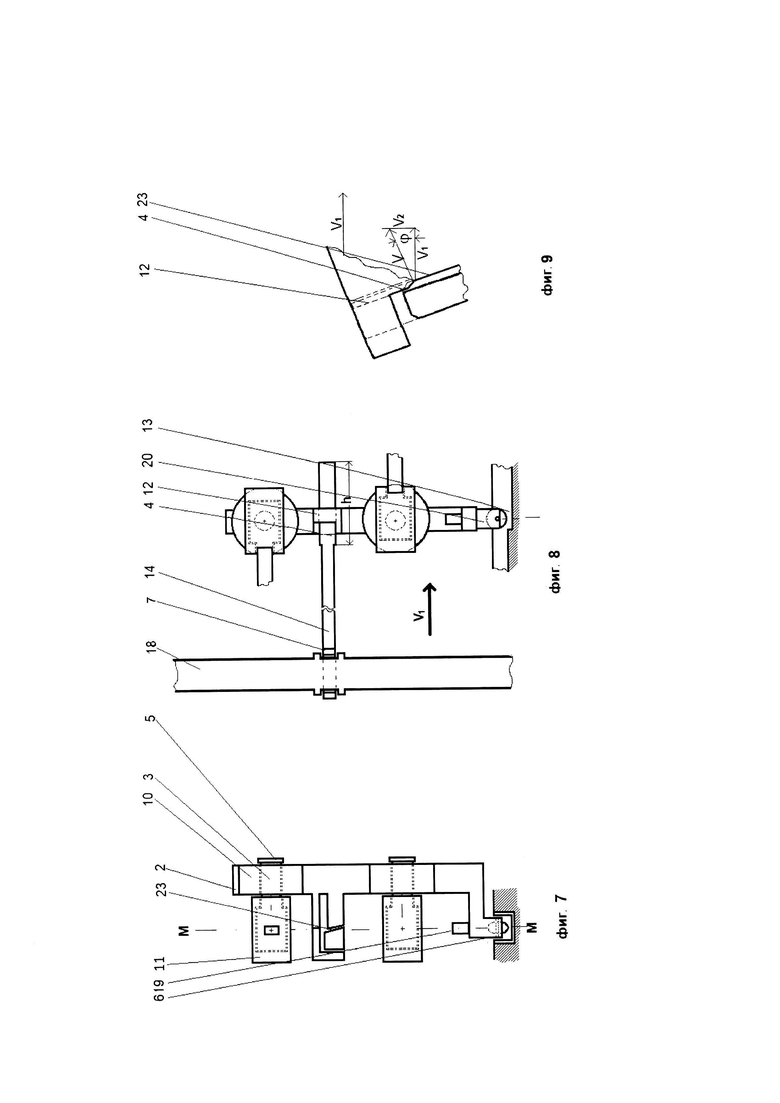
На фиг. 4, фиг. 5 и фиг. 6 изображено подвижное звено 16. Ось 3 для втулки 10 прикреплена к обойме 11, в которой размещается ось 33 так, что их центры совпадают, как показано на фиг. 6. Ось 33 подвижного звена может поворачиваться внутри обоймы 11, а стенки обоймы 22 ограничивают поворот в пределах угла ϕ. Устройство сцепления 1 связывает две части звена и позволяет уменьшать длину эвена, если такая необходимость возникла. Выступы 9, упираясь в боковые стенки сцепления 1, обеспечивают максимальный стандартный размер звена 16, а при сближении частей звена происходит изменение размера. Максимальное уменьшение размера определяется величиной N.
На фиг. 7 и фиг. 8 изображено соединительное и подвижное звено. Соединительное звено 17 состоит из центрального стержня 2, на котором закреплены две втулки 10, контактная поверхность 12 и два штыря 19 и 20. Ось 3 подвижного звена вставляется во втулку 10, а на ее конце расположены ограничители 5 для фиксации оси. Одна из втулок связана с концом правого подвижного звена, а другая с началом левого звена. Спицы прикреплены к звездочке 14, которая с помощью втулки 7 соединена с осью 18. Показана контактная поверхность 23 спицы 4. Шип 20 вставляется в профиль 13 и заканчивается колесом 6. Для соединения внешнего устройства используется шип 19. Линия М-М проходит через центры осей подвижных звеньев при их прямолинейном движении, через центр шипа 20 и шипа 19, поэтому соединительное звено может свободно поворачиваться вокруг этой линии, не изменяя положения подвижных звеньев.
На фиг. 9 показано взаимное положение контактной поверхности 12 соединительного звена и контактной поверхности 23 спицы 4 в момент приближения спицы к соединительному звену для перехода от прямолинейного движения к вращательному. Горизонтальная составляющая скорости спицы 4 равна V1 и равна скорости контактной поверхности 12, а вертикальная скорость V2 имеется только у спицы. Поэтому контактная поверхность 23 спицы будет двигаться по касательной линии вдоль контактной поверхности 12 и займет положение, показанное на фиг. 7. При вращении спицы контактная поверхность 12 будет поворачиваться, вместе с соединительным звеном, обеспечивая плотное соприкосновение со спицей. Угол поворота по отношению к вертикали изменяется в пределах от -ϕ до +ϕ.
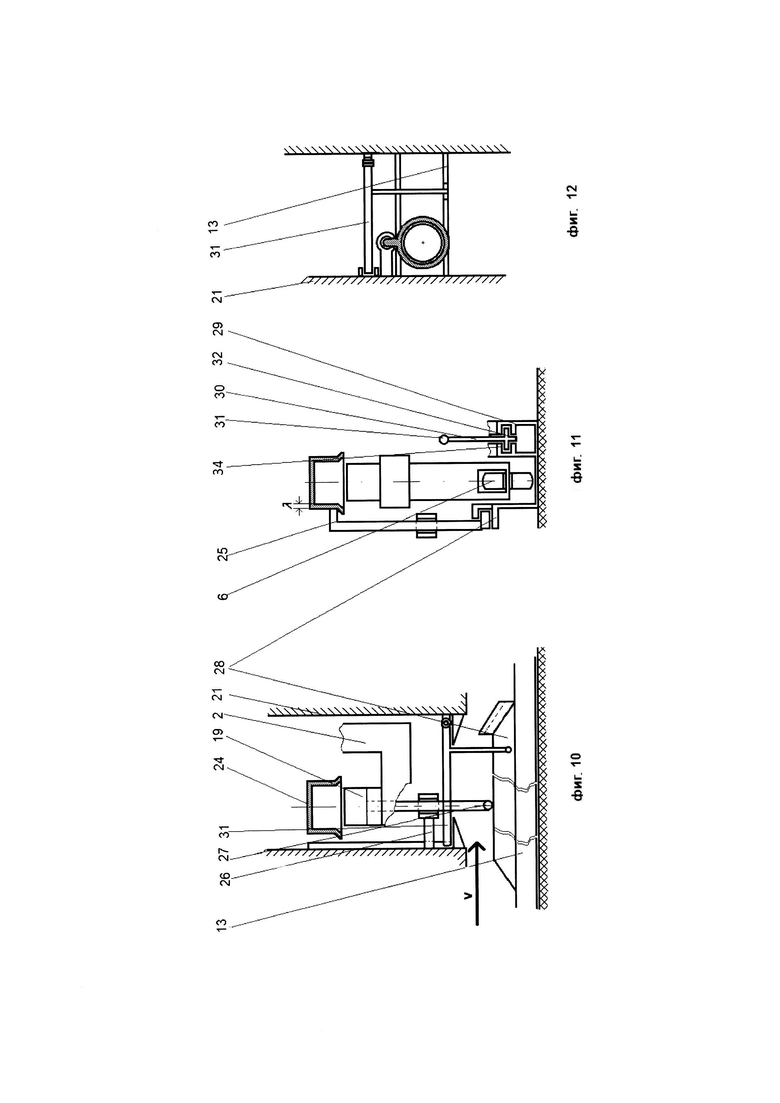
Для соединения с внешним устройством 21 используется шип 19. На фиг. 10 фиг. 11 и фиг. 12 изображено соединение между цепью и внешними устройствами 21, которые представлены боковыми стенками, а устройства соединения и управления расположены между ними. Продольная длина внешнего устройства меньше продольной длины подвижного звена. Соединение состоит из крышки 24, которая одевается на шип 19. Крышка 24 и шип 19 имеют цилиндрическую поверхность. С помощью стойки 25 и крепления 26 крышка может подниматься и опускаться. Такое движение происходит с помощью устройства управления 28, которое закреплено на стенке профиля 13. Ползун 27 вставляется в устройство управления 28 при движении. Расстояние между соседними внешними устройствами, при необходимости, может изменяться с помощью устройства 29, которое закреплено на другой стенке профиля 13. Организация его работы такая же, как устройства 28. Ползун 32, закрепленный на стержне 30, вставляется в разрез 34 устройства 29 и при изменении высоты положения ползуна изменяется угол наклона рейки 31, что приводит к изменению длины устройства 21. При движении ползуна 32 по горизонтальному участку устройства 29 фиксируется это положение рейки. Рейка 31 обеспечивает постоянное расстояние между внешними устройствами во время движения внутри секции равное длине подвижного звена. Изменение размера необходимо из-за того, что длины участков потоков движения между секциями разные, как видно на фиг. 13, а так же при изменении направления движения внутри секции.
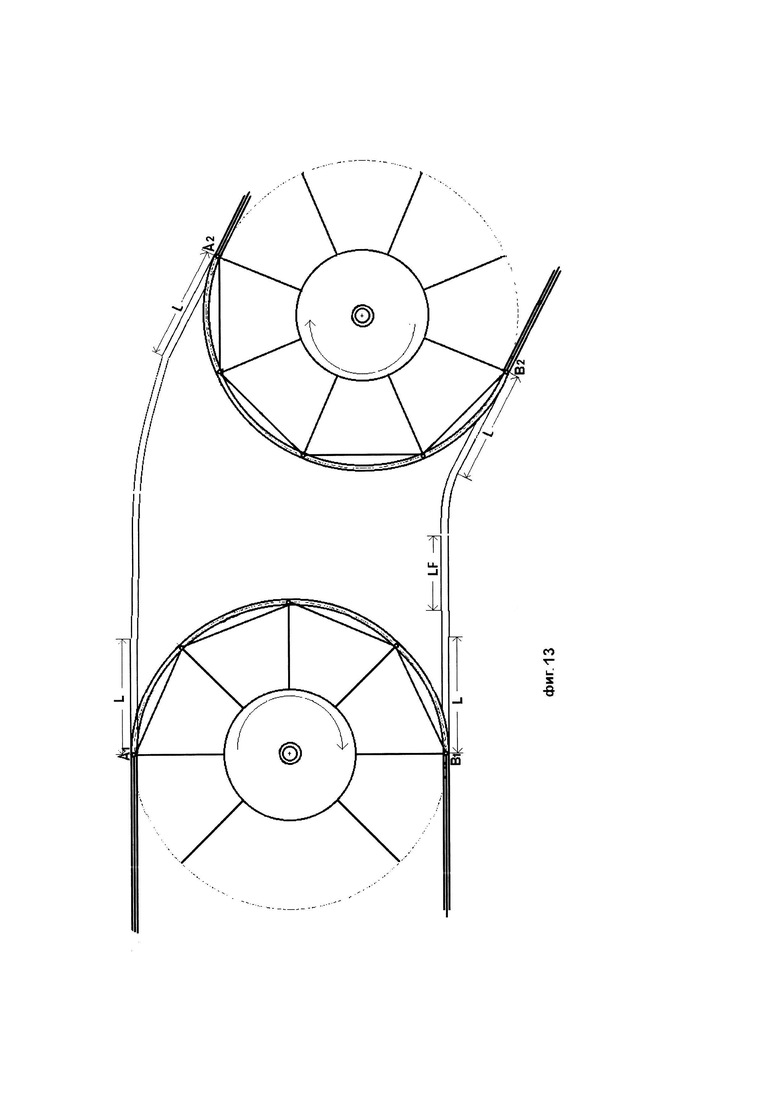
На фиг. 13 изображены две цепные передачи, принадлежащие двум секциям. Расстояние между звездочками секций произвольное, но кратное наибольшей длине необходимой для соединения секций, а минимальное количество такое, чтобы секции не задевали друг друга. В точке A1 соединительное звено отцепляется от внешнего устройства и продолжает вращение, в то время как внешние устройства будут двигаться, так как левая секция будет продвигать их дальше, а в точке А2 внешнее устройство подсоединится к соединительному звену другой секции. В промежутке между точками A1 и А2 одного потока и точками B1 и В2 другого потока внешние устройства могут изменять направление движения как в горизонтальной, так и в вертикальной плоскости за счет того, что ползун 32 устройства 29 вставлен в разрез 34. При входе в любую секцию длина подвижного звена должна быть равна L. Длина отрезков движения звеньев между точками A1 А2 и B1 В2 разные. Если между точками A1 А2 длина звеньев равна L, то между точками B1 В2 часть звеньев имеют длину LF. Рассмотрим участок цепи между точками B1 В2 состоящей, как минимум, из трех звеньев, в котором первый и последний имеют длину L, а остальные LF. На месте их расположения установлено устройство 29. Пусть движение происходит слева направо. Тогда первое звено попадает в зону уменьшения длины звена из-за подъема ползуна 32, тогда как последнее звено попадает зону повышения длины звена из-за того, что ползун 32 опускается, а промежуточные звенья находится в зоне поддержания постоянного размера звена. Пусть зоны изменения длины звена распространяется на всю длину звена и прямолинейны. При движении уменьшение длины на первом звене и увеличение длины на последнем звене одинаковы, следовательно, размер зоны и всей цепи не меняется. При изменении направления движения в вертикальной плоскости расстояние между точками А1А2 и В1 В2 одинаковы.
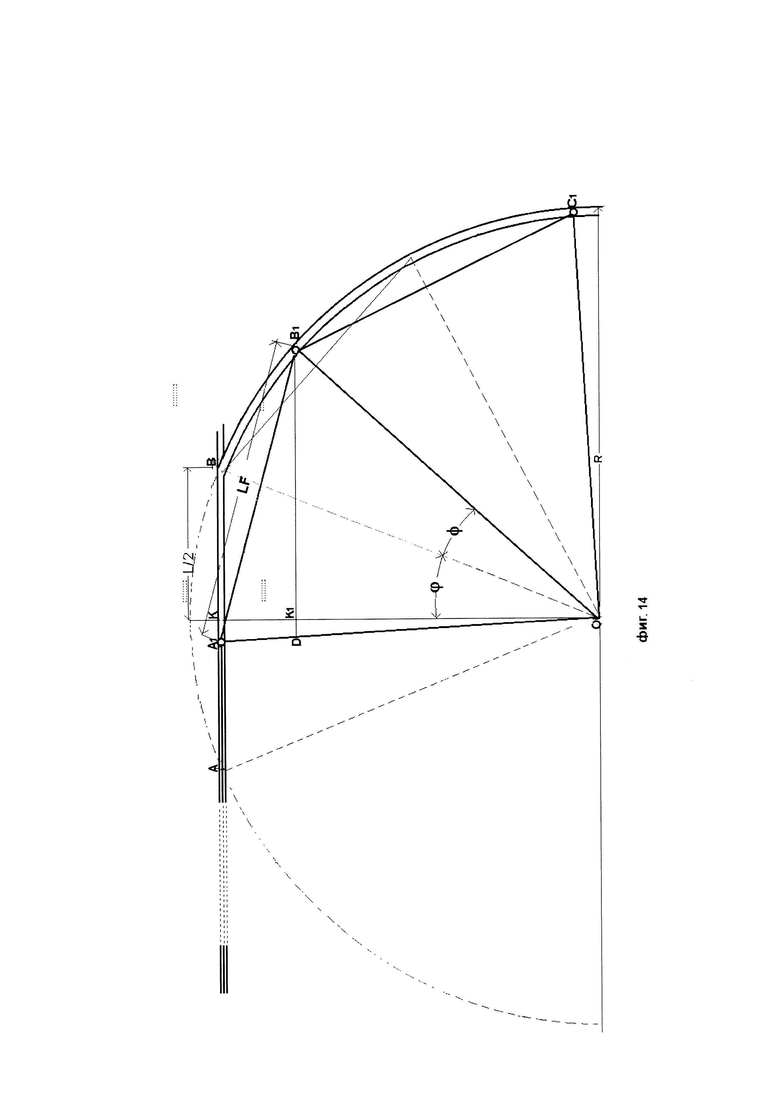
На фиг. 14 изображена схема расположения звеньев в тот момент, когда звездочка повернулась на угол φ. Звено АВ перешло в положение А1 В1 и длина его стала LF. Звено ВС перейдет в положение В1С1.
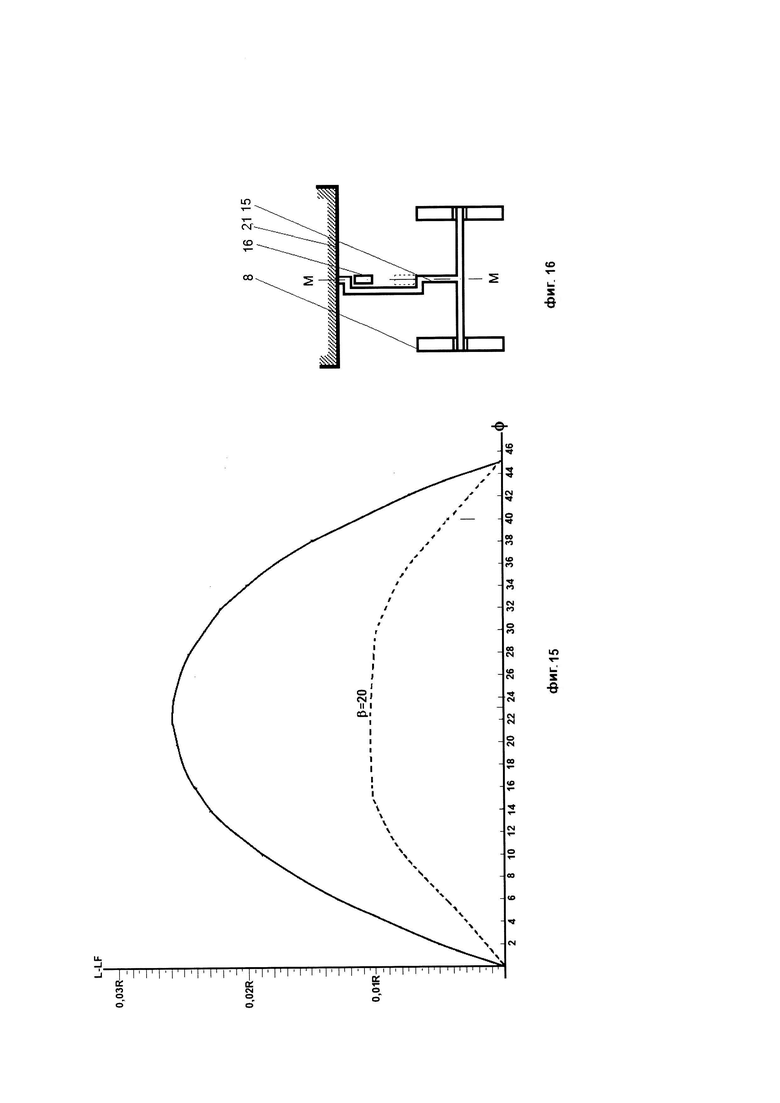
На фиг. 15 показан график изменения размера подвижного звена LF по отношению к истинному размеру L в зависимости от угла поворота φ при переходе от прямолинейного движения к вращательному и наоборот.
На фиг. 16 показано взаимное положение крепления 15 и подвижных звеньев цепи 16. На схеме 2 видно, что при отцеплении внешнего устройства при таком расположении крепления 15, отсутствуют препятствия для движения цепи отдельно от внешнего устройства.
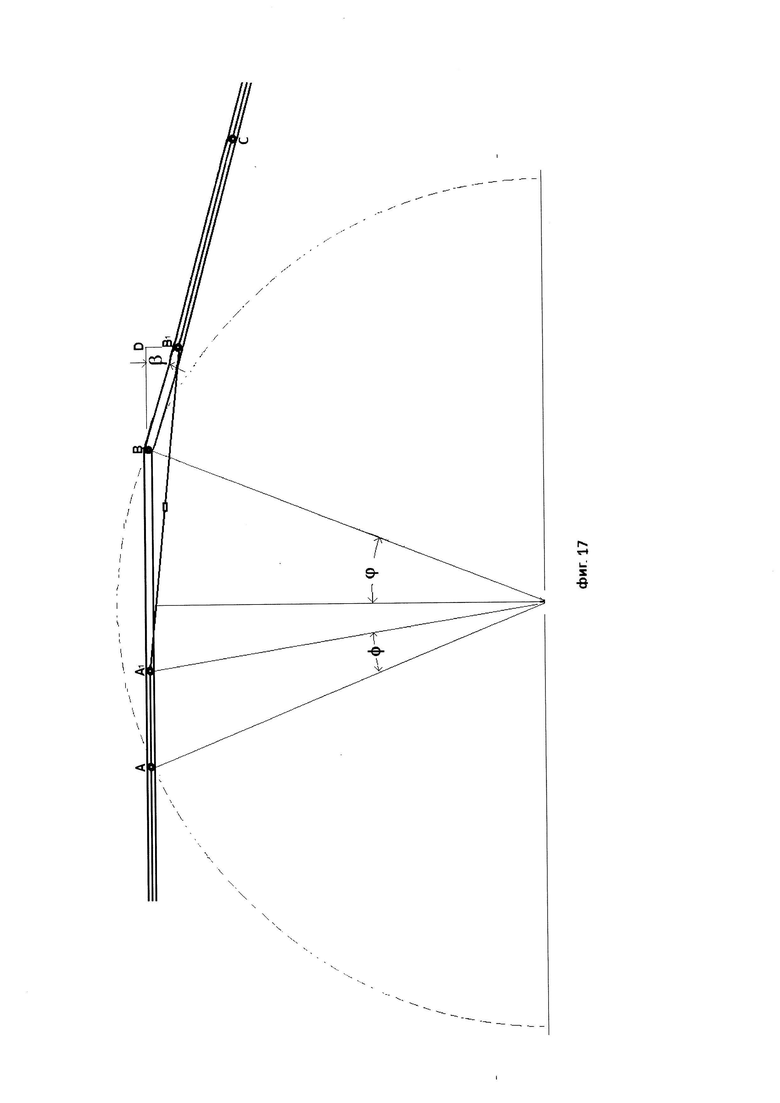
На фиг. 17 показана схема при движении звена от точки А до точки В, в тех же единицах измерения, что и для звездочки, хотя она не используется. При повороте на угол φ отрезок AA1 равен отрезку BB1, а подвижное звено АВ займет положение А1 В1. Изменение размера звена и зависимости от угла φ и угла поворота β показано на фиг. 15.
Движение цепи при переходе от прямолинейного движения к вращательному происходит следующим образом: пусть подвижное звено располагается между соединительными звеньями в точках А и В, как показано на фиг. 2. При прямолинейном движении звеньев с использованием колеса 6 соединительное звено ориентировано так, что ось колеса 6 перпендикулярна стенкам профиля 13. На фиг. 2 пунктиром показана ориентация звена по линии AG, но при подходе к точке А спица 4 при вращении повернет звено на угол ϕ вправо от вертикали в положение, показанном на фиг.9 и контактные поверхности на спице и звене совместятся.
При дальнейшем движении соединительное звено будет поворачиваться, как и его колесо 6, но профиль 13 между точками А и В проложен ниже, поэтому колесо не касается профиля 13, но штырь будет касаться стенок профиля, а соединительные звенья будут висеть на спицах 4 из-за скошенных контактных поверхностей, как показано на фиг. 7. Такое положение обеспечивает тесный контакт поверхностей. Соединительное звено в точке А двигается с постоянной скоростью прямолинейного движения вдоль профиля 13, как рассматривалось ранее. При вращении спицы 4 только горизонтальная скорость передается соединительному звену за счет того, что его контактная поверхность 12 скользит вдоль контактной поверхности 23 на спице 4. Соединительное звено от точки В и дальше двигается по траектории вращения звеньев. Положение подвижного звена АВ определяется двумя спицами в точках А и В, как показано на фиг.14, расположенных на соединительных звеньях, положение которых определено профилем 13 с точностью до допусков в подвижных соединениях. Поэтому при повороте на угол φ подвижное звено АВ займет положение А1 В1 и изменение длины звена LF произойдет автоматически и не повлияет на положение соседних звеньев.
График изменения разности истинного размера звена L и фактического размера LF показан на фиг. 15. На графике видно, что LF всегда меньше или равно L. Такое движение возможно из-за наличия на подвижном звене устройства сцепления 1 и потому, что шип соединительного звена двигается внутри профиля 13. Максимальное значения N для обеспечения вращения равно 0,02577⋅R. При повороте на угол 2⋅ϕ звено АВ перейдет в положение ВС, а звено AZ в положение АВ. Для звена АВ переход от прямолинейного движения к вращательному движению завершен. В дальнейшем, при вращении звено АВ перейдет в положение В2С2, показанное на фиг. 3. После этого начнется переход от вращательного движения к прямолинейному, обратный тому, который описан выше. Звено перейдет положение А2В2. Такое движение осуществляется вместе с внешним устройством, если оно подсоединено.
Если внешнее устройство нужно присоединить к другой секции, то на внешнею стенку профиля 13 устанавливается устройство управления 28 так, что в точке В крышка 24 поднята и шип 19, а с ним и соединительное звено 17 отсоединены от внешнего устройства. Обычно крышка 24 опущена. Сначала, при движении с использованием устройство управления 28 крышка 24 поднимается и на горизонтальном участке устройства управления 28 удерживается а поднятом положении. Как только крышка 24 окажется над соединительным звеном, на стержень 25 будет оказываться давление сверху элементом управления 28 и гнездо опустится. Зазор А, допускает отклонение соединения внешнего устройства с соединительным звеном. Устройство 28 расположено выше стенки профиля 13 и с наружной стороны, поэтому не мешает движению штыря 20 в профиле 13.
Внутри секции могут располагаться промежуточные ведущие звездочки, которые позволяют перераспределять натяжение цепи. Только две спицы участвуют в перераспределении. При использовании промежуточных звездочек возможно движение отдельных фрагментов цепей, которые по длине перекрывают расстояние между двумя звездочками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепная передача со звеньями большого размера | 2022 |
|
RU2775281C1 |
| Цепная передача со звеньями большого размера | 2019 |
|
RU2726503C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ МОМЕНТА ВРАЩЕНИЯ | 2004 |
|
RU2266447C1 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ШАРНИРЫ КАЧЕНИЯ С ШАРЖИРОВАННЫМИ ПОВЕРХНОСТЯМИ | 2009 |
|
RU2472050C2 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ОТКРЫТЫЕ ШАРНИРЫ КАЧЕНИЯ С ЦИЛИНДРИЧЕСКОЙ ФОРМОЙ ЭЛЕМЕНТА ЗАЦЕПЛЕНИЯ | 2009 |
|
RU2472049C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ПОТОКА | 2010 |
|
RU2449166C1 |
| ПРИВОДНАЯ РОЛИКОВАЯ ЦЕПЬ С ШАРНИРАМИ КАЧЕНИЯ | 2009 |
|
RU2450184C2 |
| ЗВЕЗДОЧКА ЦЕПНОЙ ПЕРЕДАЧИ ДЛЯ ЦЕПНОЙ ПИЛЫ (ВАРИАНТЫ) И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2354541C2 |
| ДВИГАТЕЛЬ-МАХОВИК | 1998 |
|
RU2154175C2 |
| Цепная передача | 1990 |
|
SU1728556A1 |
Изобретение относится к области машиностроения. Цепная передача с подвижными звеньями изменяемой длины состоит из соединительных и подвижных звеньев. Соединительные звенья содержат два штыря, один из которых вставляется в направляющий профиль, а второй служит для прикрепления внешних устройств, содержат две втулки для дополнительных осей соседних подвижных звеньев, а контактная поверхность подвижно взаимодействует с контактной поверхностью спиц звездочек, что обеспечивает согласование прямолинейного и вращательного движения. Подвижные звенья могут изменять свою длину и содержат дополнительную ось, которая вставляется во втулку соединительного звена. Внешние устройства открепляются от соединительного звена одной цепной передачи и прикрепляются к звену другой цепной передачи по мере их движения, а сами цепные передачи могут быть расположены так, что изменится направление движения. Обеспечивается расширение функциональных возможностей цепной передачи. 17 ил.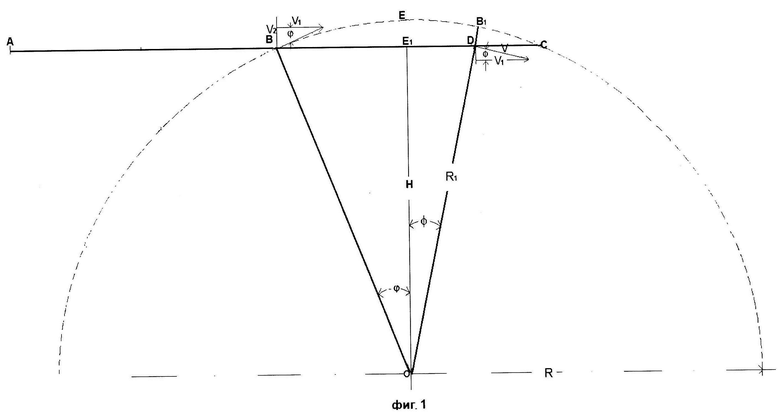
Цепная передача с подвижными звеньями изменяемой длины, состоящая из соединительных и подвижных звеньев, отличающаяся тем, что соединительные звенья содержат два штыря, один из которых вставляется в направляющий профиль, а второй служит для прикрепления внешних устройств, содержат две втулки для дополнительных осей соседних подвижных звеньев, а контактная поверхность подвижно взаимодействует с контактной поверхностью спиц звездочек, что обеспечивает согласование прямолинейного и вращательного движения, а подвижные звенья могут изменять свою длину и содержат дополнительную ось, которая вставляется во втулку соединительного звена, а внешние устройства открепляются от соединительного звена одной цепной передачи и прикрепляются к звену другой цепной передачи по мере их движения, а сами цепные передачи могут быть расположены так, что изменится направление движения.
| Цепная передача со звеньями большого размера | 2019 |
|
RU2726503C1 |
| ВТУЛОЧНО-РОЛИКОВАЯ ЦЕПЬ | 2006 |
|
RU2303726C1 |
| US 8491430 B1, 23.07.2013 | |||
| 0 |
|
SU173588A1 | |
| ЦЕПНОЙ ПРИВОД ГЕТЕРОГЕННОГО МОДУЛЬНОГО РЕКОНФИГУРИРУЕМОГО МОБИЛЬНОГО РОБОТА | 2020 |
|
RU2738620C1 |

