Изобретение относится к области машиностроения и может быть использовано на транспорте.
Хорошо известна цепная передача со звеньями большого размера, в которой обеспечивается движение звеньев, но скорость движения цепи переменна. Изобретение предлагает вариант цепной передачи со звеньями постоянного размера и постоянной скоростью движения.
Цепная передача со звеньями большого размера, состоящая из двух ступиц со спицами, соединительных и подвижных звеньев, в которой соединительные звенья содержат две втулки для дополнительных осей соседних подвижных звеньев, контактную поверхность, шип, который вставляется в направляющий профиль для обеспечения прямолинейного движения, отличающаяся тем, что на ступице закреплены спицы двух типов, так что спицы первого типа содержат контактную поверхность для взаимодействия с контактной поверхностью соединительного звена, а спицы второго типа заканчиваются зубцом, подвижные звенья содержат гнездо для зубца спицы, дополнительную ось, которая вставляется во втулку соединительного звена, так что передвижение этой оси во втулке изменяет расстояние до центра звездочки и обеспечивает согласование прямолинейного вида движения звеньев цепи и вращательного движения, два штыря в начале и конце подвижного звена, которые вставляются в направляющий профиль, расположенный по траектории вращения центров осей подвижных звеньев, что обеспечивает вращение звеньев при смене вида движения.
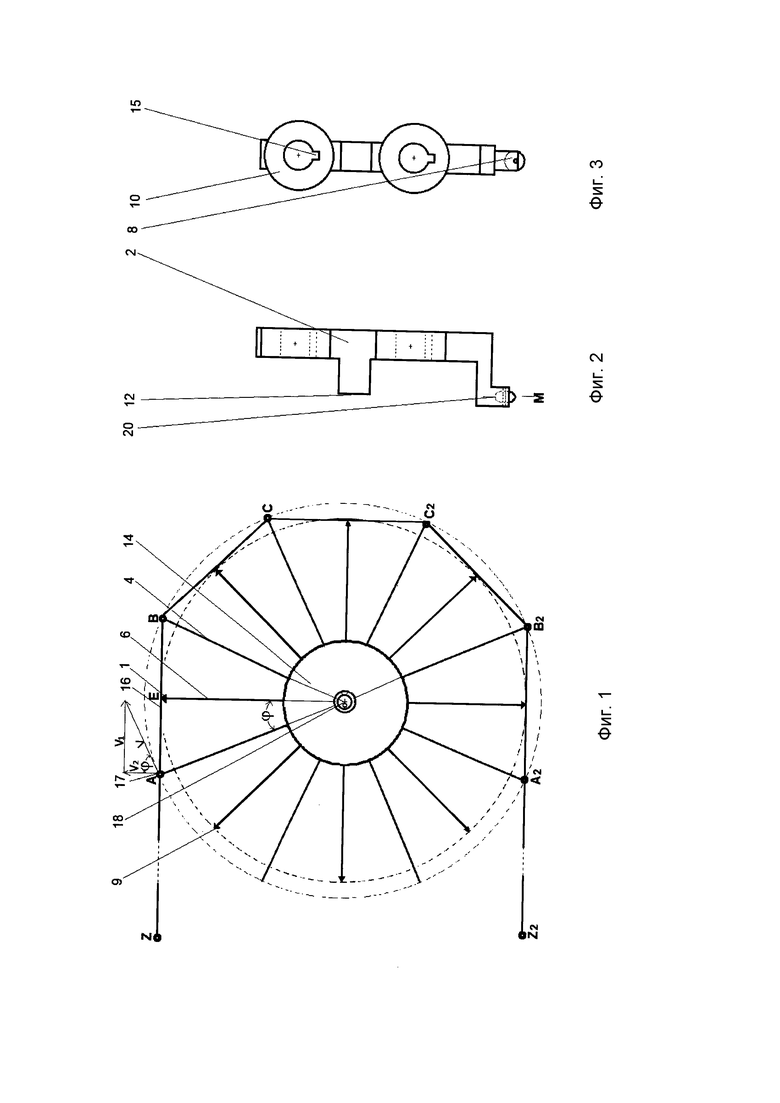
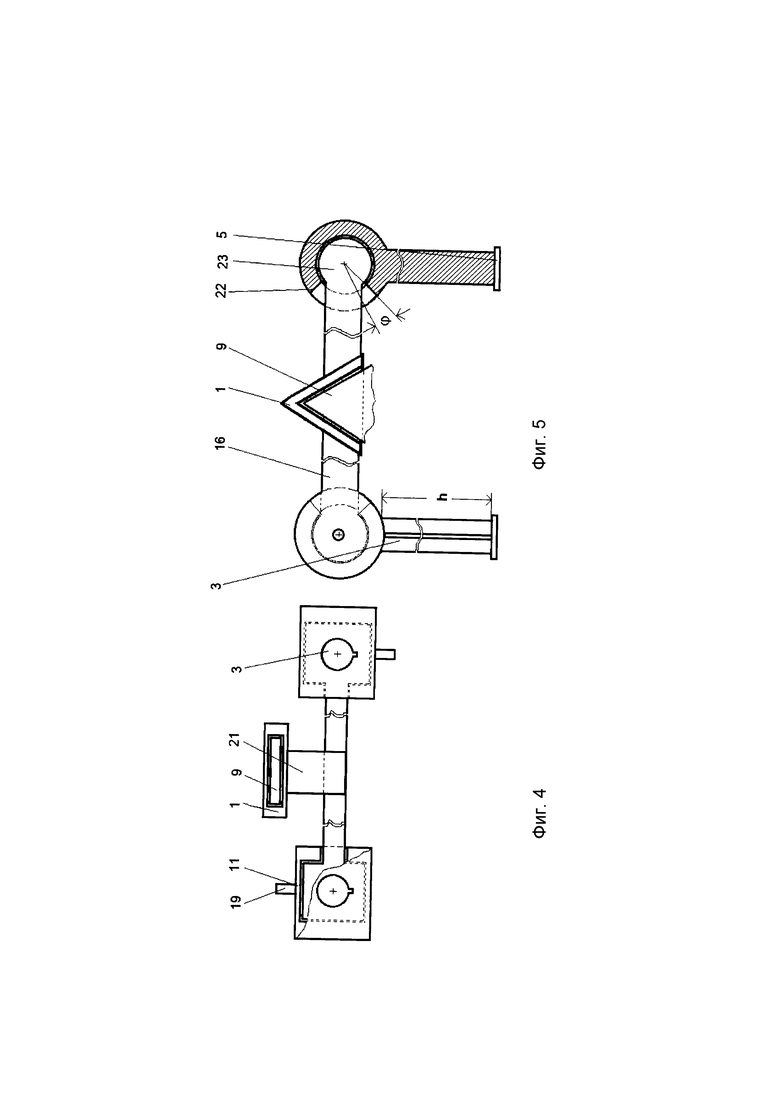
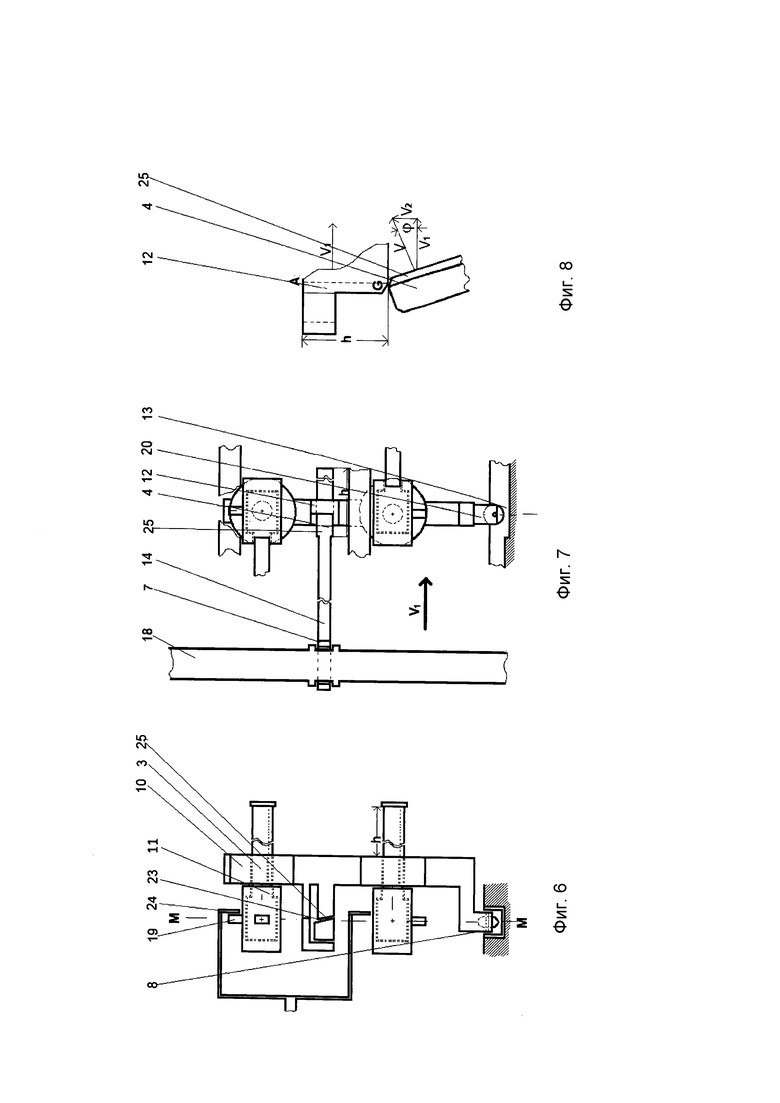
На фиг. 1 изображена ступица со спицами. На фиг. 2 и фиг. 3 изображено соединительное звено. На фиг. 4 и фиг. 5 изображено подвижное звено. На фиг. 6 и фиг. 7 изображены подвижное и соединительное звено в собранном виде. На фиг. 8 показано взаимодействие контактных поверхностей. На фиг. 9 изображена схема начального расположения звеньев. На фиг. 10 изображена схема расположения звеньев при повороте на угол ϕ.
На фиг. 1 показана ступица 14, на которой закреплены спицы 4, контактирующие с соединительными звеньями 17, и спицы 6, заканчивающиеся зубцом 9, который вставляется в гнездо 1 на подвижном звене 16. Ступица вращается вокруг оси 18. Пусть скорость вращения ступицы V, a V1 горизонтальная составляющая скорости и V2 вертикальная составляющая. При движении вдоль линии АВ скорость движения постоянна и равна V1=V⋅cos(ϕ) при вращении ступицы с линейной скоростью V.
На фиг. 2 и фиг. 3 показано соединительное звено 17, состоящее из центрального стержня 2, на котором закреплены две втулки 10 и шип 20, который заканчивается колесом 8. Показано расположение контактной поверхности 12. Втулки 10 имеют разрез 15.
На фиг. 4 и фиг. 5 показано подвижное звено 16. В середине подвижного звена на выступе 21 расположено гнездо 1 для зубца 9. Так как втулки расположены по обе стороны спицы 4, то стойка 21 всегда направлена в сторону спицы. Ось 3 для втулки 10 прикреплена к обойме 11 так, что их центры совпадают, как показано на фиг. 5. Ось 23 подвижного звена вставлена в обойму 11. Подвижное звено может поворачиваться вокруг центра оси 11 в пределах угла ϕ за счет ограничителей 22. Выступ на оси 3 вместе с разрезом 15 образуют шлицевое соединение с втулкой 10. На конце оси 3 устанавливается ограничитель 5.
На фиг. 6, фиг. 7 показаны соединительное и подвижное звено в собранном виде. Ось 3 вставляется во втулку 10 с возможностью ее передвижения, а шлицевое соединение 15 препятствует ее вращению. Если предположить, что движение происходит слева направо, то одна из втулок связана с концом правого подвижного звена и шип 19 на ней расположен сверху, а другая с началом левого звена и шип 19 на ней расположен снизу. Шип 19 контактирует с направляющим профилем 24, который показан вместе с креплением. Шип 20 вставляется в направляющий профиль 13. Линия М-М проходит через центры осей подвижных звеньев при их прямолинейном движении, через центр шипа 20, поэтому соединительное звено может свободно поворачиваться вокруг этой линии, не изменяя положения подвижных звеньев. Показана ступица 14, которая с помощью втулки 7 соединена с осью 18. Показана контактная поверхность 25 на спице 4, которая взаимодействует с контактной поверхностью 12 на соединительном звене.
На фиг. 8 показано взаимное положение контактной поверхности 12 на соединительном звене и контактной поверхности 25 на спице 4. При вращении спица 4 подходит к линии A-G показанной на фиг. 9 пунктиром. Так как соединительное звено свободно поворачивается вокруг оси шипа 20, то звено будет поворачиваться по мере движения спицы, но положение подвижных звеньев не меняется. В этом случае спица 4 при вращении повернет звено на угол ϕ вправо от вертикали и контактные поверхности на спице и звене совместятся. Горизонтальная составляющая скорости спицы V1 равна скорости контактной поверхности 12, а скорость V2 имеется только у спицы. Поэтому спица 4 будет поворачивать соединительное звено без изменения положения подвижных звеньев, как описывалось ранее, до тех пор, пока контактные поверхности не совместятся в точке А. Это положение, показано на фиг. 6. При вращении спицы контактная поверхность 12 будет поворачиваться, вместе с соединительным звеном, обеспечивая плотное соприкосновение со спицей. Угол поворота по отношению к вертикали изменяется в пределах от -ϕ до +ϕ.
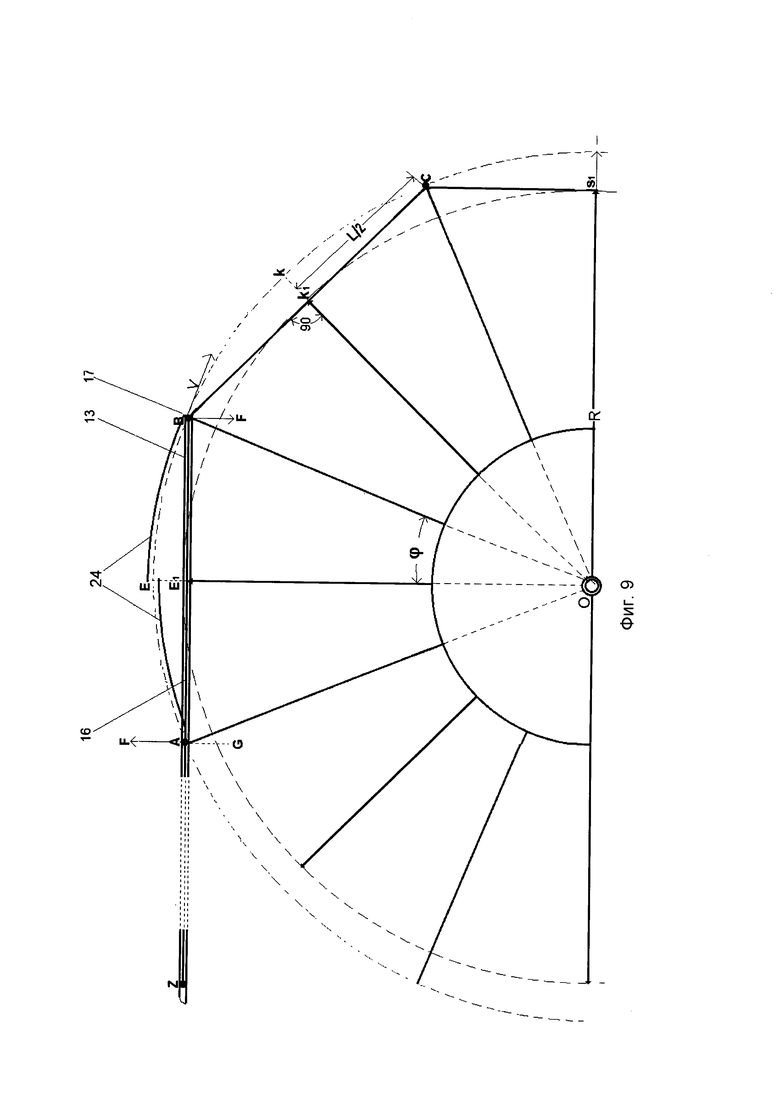
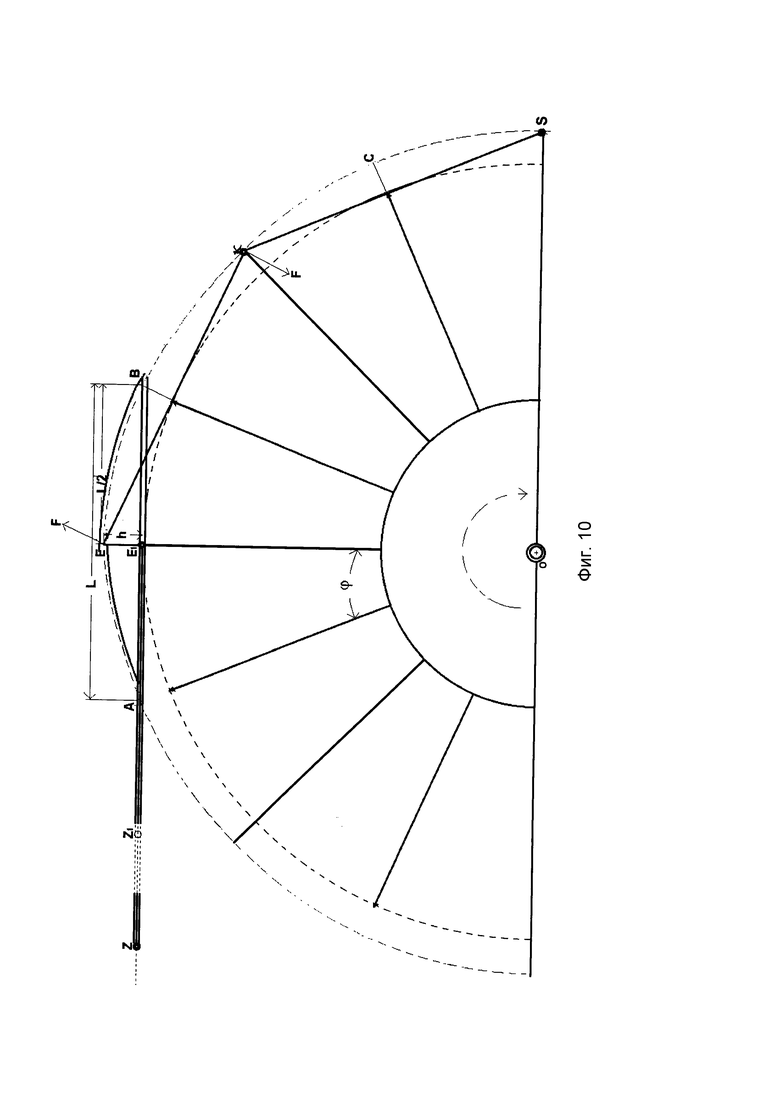
На фиг. 9 изображена схема расположения звеньев цепной передачи в тот момент, когда звено АВ переходит от поступательного движения к вращательному. В точках А, В, С, Z расположены соединительные звенья 17. Отрезки АВ, ВС, AZ это подвижные звенья 16. ОВ, ОС, OA это спицы первого типа 4 подвижно связанные с соединительными звеньями. OE1, OK1, OS1 это спицы 6 второго типа, соединяющие середины подвижных звеньев со ступицей. Показан профиль 13, который обеспечивает прямолинейное движение подвижного звена, и направляющие 24, которые обеспечивают вращательное движение подвижных звеньев при смене вида движения. Угловое расстояние ϕ между спицами принято равным 22,5 градусам. Длинна подвижного звена цепи равна L=2⋅sun(ϕ)⋅R, где R длина спицы от центра звездочки до соединительного звена.
Движение цепи при переходе от прямолинейного движения к вращательному происходит следующим образом: пусть подвижное звено расположено между соединительными звеньями в точках А и в точке В. Шип 20 соединительного звена в точке А уже при прямолинейном движении вставлен в направляющий профиль 13, который заканчивается в точке В, как показано на фиг. 9. При движении на прямолинейном участке скорость движения равна V1. При дальнейшем движении соединительное звено в точке В приобретет вертикальную составляющую скорости V2, так как спица ОВ передает скорость V направленную по нормали к спице ОВ, a V1 и V2 составляющие V. Это значит, что соединительное звено и его правое подвижное звено будут вращаться.
На конце подвижного звена в точке А расположен шип 19, который взаимодействует с направляющем профилем 24. Вращение подвижного звена ВС, а так же вращение спицы OE1 создает в точке В силу, которая обозначена F. Под действием этой силы в точке E1 создается мгновенный центр вращения, возникает момент вращения подвижного звена АВ, вектор которого направлен по нормали к подвижному звену с силой F и плечом равным L/2. В результате, подвижное звено поворачивается. Если соединение зубца звездочки и гнезда подвижного звена жесткое, то вращение подвижного звена, будет происходить по траектории вращения центов осей подвижных звеньев, показанной пунктиром. Совмещение прямолинейного движения соединительного звена и вращения правого подвижного звена осуществляется за счет того, что ось 3 подвижного звена перемещается во втулке 10 соединительного звена, компенсируя изменение расстояния между профилем 13 и траекторией вращения центра оси подвижного звена, а шип 19 подвижного звена, взаимодействуя с направляющим профилем 24, так же способствует вращению. Под действием составляющей силы F, направленной вдоль спицы происходит выдвижение оси 3. Ось 3 расположена параллельно спице 4, поэтому ее выдвижение не изменяет ориентацию соединительного звена. При повороте на угол ϕ ось 3 выдвигается на максимальное расстояние h=R(1-cos(ϕ)), как показано на фиг. 10. Звено АВ перейдет положение EK. Соединительное звено из точки А перейдет в точку E1, а его левое звено займет положение Z1E1. При дальнейшем повороте на угол ϕ ось 3 возвращается в исходное положение и соединительное звено перемещается в точку В, его левое звено займет положение между точками А и В, а правое звено разместится между точками В и С. В точке В составляющая скорости V2 скачкообразно меняется от 0 до значения V2=V⋅sin(ϕ), а значит, имеет скорость V такую же что и спица 4 в этой точке. Для звена АВ переход от прямолинейного движения к вращательному закончился. Угол между осью ОВ и подвижными звеньями равен 90 - ϕ и в таком виде они будут вращаться до тех пор, пока ось ОВ не перейдет в положение ОВ2, изображенное на фиг. 1.
Для звена В2С2 при вращении начинается переход от вращательного движения к прямолинейному движению. Этот процесс обратный тому, что рассматривалось ранее. Соединительное звено в точке В2 имеет справа подвижное звено А2 В2, которое участвует в прямолинейном движении со скоростью V1, а вертикальная скорость движения V2=0. Натяжение в цепи препятствует отклонению звеньев от прямолинейного движения. Поэтому в точке В2 касание стенок профиля 13 происходит безударно. В дальнейшем соединительное звено будет перемещаться внутри желоба 13, а спица ОЕ2 выйдет из гнезда 1. Шип 19 звена С2 В2 расположенный в начале звена и снизу взаимодействует с направляющем профилем 24, поэтому звено продолжит вращение точно так же, как было описано при вращении звена ВС, только в обратной последовательности, от точки В2 к А2. В итоге соединительное звено, располагавшееся в течке, С2 займет положение в точке В2, его левое звено расположится между точками В2 и С2 его правое подвижное звено расположится между точками А2 и В2. Для этого соединительного звена закончился переход от вращательного движения к поступательному движению.
Изобретение относится к области машиностроения. Цепная передача со звеньями большого размера состоит из двух ступиц со спицами, соединительных и подвижных звеньев, в которой соединительные звенья содержат две втулки для дополнительных осей соседних подвижных звеньев, контактную поверхность, шип, который вставляется в направляющий профиль для обеспечения прямолинейного движения. На ступице закреплены спицы двух типов, так что спицы первого типа содержат контактную поверхность для взаимодействия с контактной поверхностью соединительного звена, а спицы второго типа заканчиваются зубцом, подвижное звено содержит гнездо для зубца спицы, дополнительную ось, которая вставляется во втулку соединительного звена, так что передвижение этой оси во втулке изменяет расстояние до центра звездочки и обеспечивает согласование прямолинейного вида движения звеньев цепи и вращательного движения, два штыря в начале и конце подвижного звена, которые вставляются в направляющий профиль, расположенный по траектории вращения центров осей подвижных звеньев, что обеспечивает вращение звеньев при смене вида движения. Обеспечивается исключение растяжения цепной передачи. 10 ил.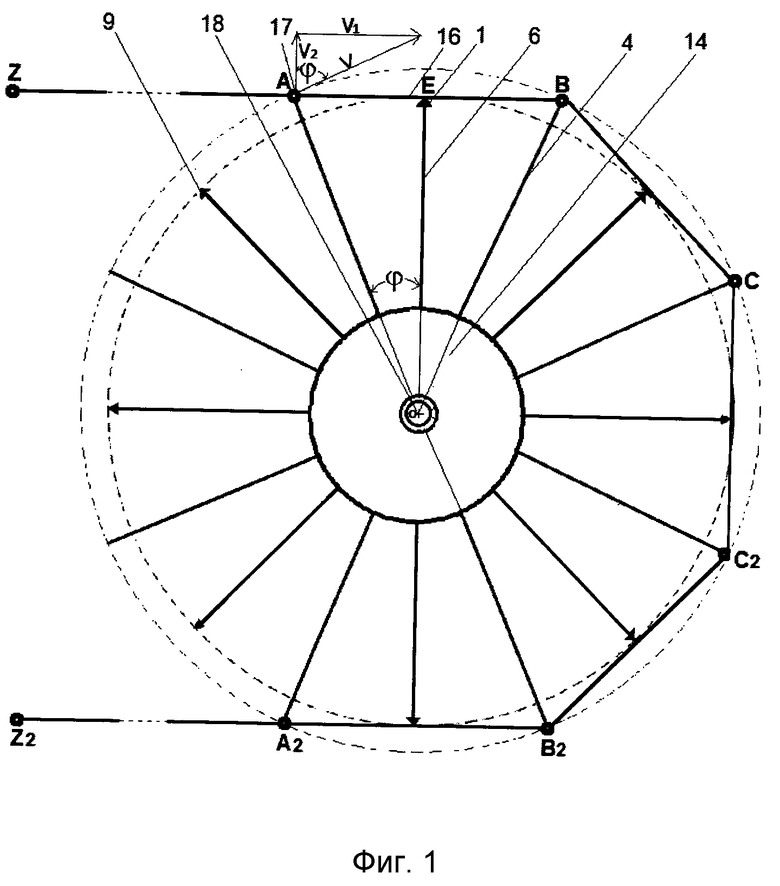
Цепная передача со звеньями большого размера, состоящая из двух ступиц со спицами, соединительных и подвижных звеньев, в которой соединительные звенья содержат две втулки для дополнительных осей соседних подвижных звеньев, контактную поверхность, шип, который вставляется в направляющий профиль для обеспечения прямолинейного движения, отличающаяся тем, что на ступице закреплены спицы двух типов, так что спицы первого типа содержат контактную поверхность для взаимодействия с контактной поверхностью соединительного звена, а спицы второго типа заканчиваются зубцом, подвижное звено содержит гнездо для зубца спицы, дополнительную ось, которая вставляется во втулку соединительного звена, так что передвижение этой оси во втулке изменяет расстояние до центра звездочки и обеспечивает согласование прямолинейного вида движения звеньев цепи и вращательного движения, два штыря в начале и конце подвижного звена, которые вставляются в направляющий профиль, расположенный по траектории вращения центров осей подвижных звеньев, что обеспечивает вращение звеньев при смене вида движения.
| Цепная передача со звеньями большого размера | 2019 |
|
RU2726503C1 |
| ВТУЛОЧНО-РОЛИКОВАЯ ЦЕПЬ | 2006 |
|
RU2303726C1 |
| US 8491430 B1, 23.07.2013 | |||
| ЦЕПНАЯ ПЕРЕДАЧА С АВТОМАТИЧЕСКИ ИЗМЕНЯЕМЫМ ШАГОМ | 2011 |
|
RU2492377C1 |

