Область техники, к которой относится изобретение
Изобретение относится к области дифференциальных передач с неравным крутящим моментом передачи между двумя выходными элементами и может быть использовано для взаимного перемещения частей гетерогенного модульного реконфигурируемого мобильного робота.
Уровень техники
Из уровня техники [SU 1085803 А1, опубликован 15.04.1984; RU 2650473 С1, опубликован 13.04.2018] известны степени роботов на основе зубчато-реечных передач, обеспечивающих высокую точность позиционирования, но обладающие тем недостатком, что перемещение ограничено габаритом робота.
Также из уровня техники [US 7337862 В1, опубликован 04.03.2008; US 8219308 В2, опубликован 10.07.2012] известны моноколеса, в которых платформа перемещается внутри обода колеса, по сути используя его в качестве направляющей, способные перемещаться на значительные расстояния, но обладающие тем недостатком, что не могут позиционироваться с высокой точностью.
Объединить преимущества таких систем, устранив их недостатки возможно в гетерогенном модульном реконфигурируемом мобильном роботе, если сделать обод колеса раскладывающимся в прямую направляющую, и расположить вдоль него роликовую цепь (для обеспечения однородности в местах разгибания обода), выступающую в роли зубчатой рейки. Для приведения в движение такого робота необходим привод, обеспечивающий движение вдоль цепи, без потери контакта между цепью и подвижной платформой под действием внешних сил.
Из уровня техники [SU 954369 А1, опубликован 30.08.1982] известны цепные лебедки, которые подходят для движения в режиме линейного перемещения, но обладают следующими недостатками:
- не могут преодолевать углы жестко закрепленной цепи;
- расположение двигателя относительно направления цепи фиксировано.
Раскрытие сущности изобретения
Предлагаемая группа изобретений направлена на решение технической задачи по устранению указанных недостатков.
Достигаемый при этом технический результат заключается в создании привода, способного продвигаться вдоль жестко закрепленной цепи, расположенной по ломаной линии, не отделяясь от цепи под воздействием внешних сил, при этом расположение двигателя относительно направления цепи может меняться в процессе работы.
Технический результат достигается тем, что цепной привод гетерогенного модульного реконфигурируемого мобильного робота состоит из шасси, на котором установлены привод верхней звездочки и привод нижней звездочки, а также ось корпуса, на которой расположен корпус, внутри которого слева и справа находятся две зафиксированные оси опорных шестерней, сверху находится свободно вращающаяся ось верхней звездочки, выходящая за пределы корпуса, а снизу - свободно вращающаяся ось нижней звездочки, выходящая за пределы корпуса, на каждой из осей опорных шестерней расположены по две свободно вращающиеся опорные шестерни, на оси верхней звездочки внутри корпуса ближе к шасси расположена свободно вращающаяся опорная шестерня, дальше от шасси внутри корпуса - жестко связанная с осью верхней звездочки приводная шестерня верхней звездочки, а снаружи корпуса - жестко связанная с осью верхней звездочки верхняя звездочка, на оси нижней звездочки внутри корпуса ближе к шасси расположена жестко связанная с осью нижней звездочки приводная шестерня нижней звездочки, дальше от шасси внутри корпуса - свободно вращающаяся опорная шестерня, а снаружи корпуса - жестко связанная с осью нижней звездочки внутренняя звездочка, двустороннее зубчатое колесо верхней звездочки вращается, охватывая внутренней стороной опорные шестерни, расположенные на двух осях опорных шестерней, опорную шестерню на оси нижней звездочки и приводную шестерню верхней звездочки, а внешней стороной входит в зацепление с приводной шестерней привода верхней звездочки, двустороннее зубчатое колесо нижней звездочки вращается, охватывая внутренней стороной опорные шестерни, расположенные на двух осях опорных шестерней, опорную шестерню на оси верхней звездочки и приводную шестерню нижней звездочки, а внешней стороной входит в зацепление с приводной шестерней привода нижней звездочки
Технический результат также достигается способом управления цепным приводом гетерогенного модульного реконфигурируемого мобильного робота, в соответствии с которым при движении вдоль линейного участка цепи привод верхней звездочки и привод нижней звездочки вращают с равной скоростью, во время преодоления угла цепи, направленного вверх, привод верхней звездочки вращают быстрее привода нижней звездочки, компенсируя необходимость преодоления большего расстояния, во время преодоления угла цепи, направленного вниз, привод нижней звездочки вращают быстрее привода верхней звездочки, компенсируя необходимость преодоления большего расстояния.
Указанные признаки изобретения являются существенными и совокупность этих признаков достаточна для получения требуемого технического результата.
Краткое описание чертежей
Группа изобретений поясняется чертежами.
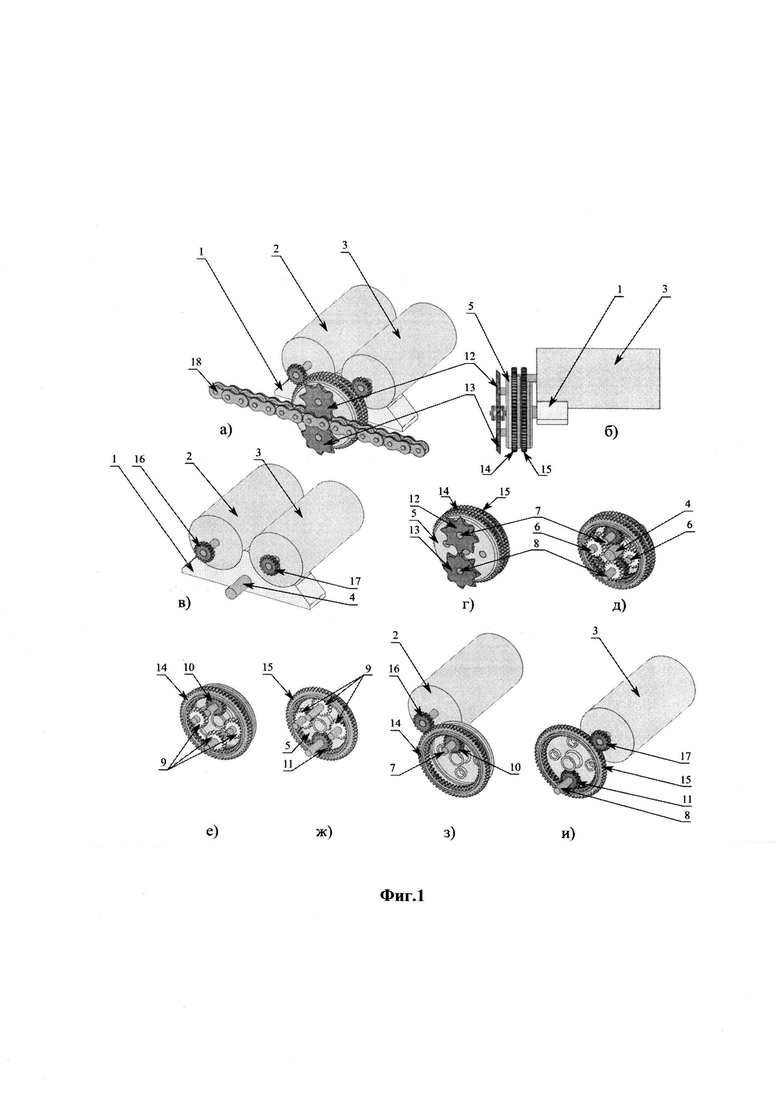
На фиг. 1 показан вид цепного привода гетерогенного модульного реконфигурируемого мобильного робота. Он состоит из шасси 1, привода верхней звездочки 2, привода нижней звездочки 3, оси корпуса 4, корпуса 5, осей опорных шестерней 6, оси верхней звездочки 7, оси нижней звездочки 8, опорных шестерней 9, приводной шестерни верхней звездочки 10, приводной шестерни нижней звездочки 11, верхней звездочки 12, нижней звездочки 13, двустороннего зубчатого колеса верхней звездочки 14, двустороннего зубчатого колеса нижней звездочки 15, приводной шестерни привода верхней звездочки 16, приводной шестерни привода нижней звездочки 17, также показана цепь 18 (а - общий вид; б - вид сбоку; в - элементы, расположенные на шасси 1; г - элементы, закрепленные на корпусе 5; д - элементы, расположенные внутри корпуса 5; е - шестерни, расположенные внутри корпуса 5 и входящие в зацепление с двусторонним зубчатым колесом верхней звездочки 14; ж - шестерни, расположенные внутри корпуса 5 и входящие в зацепление с двусторонним зубчатым колесом нижней звездочки 15; з - элементы, участвующие в передачи вращения от привода верхней звездочки 2 к оси верхней звездочки 7; и - элементы, участвующие в передачи вращения от привода нижней звездочки 3 к оси нижней звездочки 8.
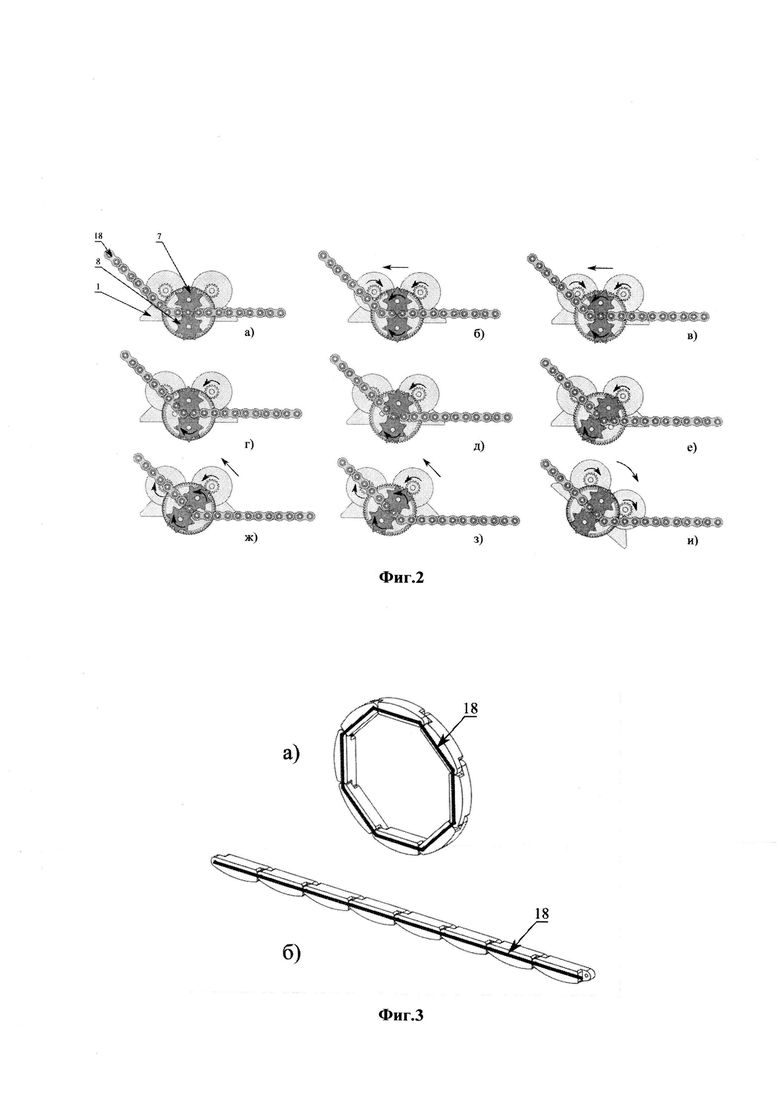
На фиг. 2 показаны фазы движения цепного привода гетерогенного модульного реконфигурируемого мобильного робота вдоль изогнутого участка цепи 18 (цепь 18 показана в разрезе).
На фиг. 3 показано модульное моноколесо с цепью вдоль обода конфигурации колеса (а) и линейной направляющей (б).
Осуществление изобретения
Работает устройство следующим образом.
При движении вдоль цепи 18 привод верхней звездочки 2 и привод нижней звездочки 3 вращаются в противоположных направлениях. Вращение от привода верхней звездочки 2 передается через приводную шестерню привода верхней звездочки 16, двустороннее зубчатое колесо верхней звездочки 14, приводную шестерню верхней звездочки 10 и ось верхней звездочки 7 на верхнюю звездочку 12. Вращение от привода нижней звездочки 3 передается через приводную шестерню привода нижней звездочки 17, двустороннее зубчатое колесо нижней звездочки 15, приводную шестерню нижней звездочки 11 и ось нижней звездочки 8 на нижнюю звездочку 13. Верхняя звездочка 12 и нижняя звездочка 13 при этом вращаются встречно и продвигаются вдоль цепи 18. При движении вдоль прямого участка цепи 18 при равных по модулю скоростей вращения привода верхней звездочки 2 и привода нижней звездочки 3 моменты, воздействующие на корпус 5, оказываются скомпенсированы, и он остается неподвижен относительно оси корпуса 4 (фиг. 2 а, б, в, ж, з). При преодолении изгиба цепи 18, например, направленного вверх, привод нижней звездочки 3 начинает вращаться быстрее привода верхней звездочки 2, компенсируя необходимость преодоления большего расстояния, при этом возникающая разница моментов приводит к повороту корпуса 5 относительно оси корпуса 4, притом что ориентация шасси 7 относительно цепи 18 сохраняется (фиг. 2 г, д, е). В случае, если привод верхней звездочки 2 и привод нижней звездочки 3 вращаются в одном направлении, верхняя звездочка 12 и нижняя звездочка 13 блокируют друг друга и все передачи, расположенные в корпусе 5, в следствии чего происходит вращение всего шасси 1 относительно корпуса 5 (фиг. 2 и).
Работоспособность группы изобретений была проверена на компьютерной модели. Была смоделирована жестко закрепленная цепь, два линейных участка которой расположены под углом 135°, на которой было проверено, что применение описанного способа управления позволяет цепному приводом гетерогенного модульного реконфигурируемого мобильного робота преодолеть угол цепи, а также изменять свой угол наклона относительно цепи.
Проведенное моделирование наглядно продемонстрировало получение требуемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТ | 1991 |
|
RU2026227C1 |
| ГЕТЕРОГЕННЫЙ МОДУЛЬНЫЙ РЕКОНФИГУРИРУЕМЫЙ МОБИЛЬНЫЙ РОБОТ | 2020 |
|
RU2744050C1 |
| ТРАНСМИССИЯ СНЕГОХОДА | 2022 |
|
RU2794007C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |
| ПРИВОДНАЯ СИСТЕМА ШАССИ (ВАРИАНТЫ) | 2013 |
|
RU2643114C2 |
| ПРИВОДНАЯ СИСТЕМА ШАССИ | 2013 |
|
RU2643857C2 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
Группа изобретений относится к области дифференциальных передач. Цепной привод состоит из шасси, на котором установлены привод верхней звездочки (ВЗ) и привод нижней звездочки (НЗ), а также ось корпуса, внутри которого слева и справа находятся две зафиксированные оси опорных шестерней, сверху и снизу находятся свободно вращающиеся оси верхней и нижней звездочек соответственно, выходящие за пределы корпуса. На каждой из осей опорных шестерней расположены по две опорные шестерни, на оси ВЗ внутри корпуса ближе к шасси расположена опорная шестерня, дальше от шасси внутри корпуса - приводная шестерня ВЗ, а снаружи корпуса - ВЗ, на оси НЗ ближе к шасси расположена приводная шестерня НЗ, дальше от шасси - опорная шестерня, а снаружи корпуса - жестко связанная с осью НЗ внутренняя звездочка, двустороннее зубчатое колесо ВЗ вращается, охватывая внутренней стороной опорные шестерни, опорную шестерню на оси НЗ и приводную шестерню ВЗ, а внешней стороной входит в зацепление с приводной шестерней привода ВЗ, двустороннее зубчатое колесо НЗ вращается, охватывая внутренней стороной опорные шестерни, расположенные на двух осях опорных шестерней, опорную шестерню на оси ВЗ и приводную шестерню НЗ, а внешней стороной входит в зацепление с приводной шестерней привода НЗ. Также предложен способ управления указанным цепным приводом. Обеспечивается расширение арсенала технических средств. 2 н.п. ф-лы, 3 ил.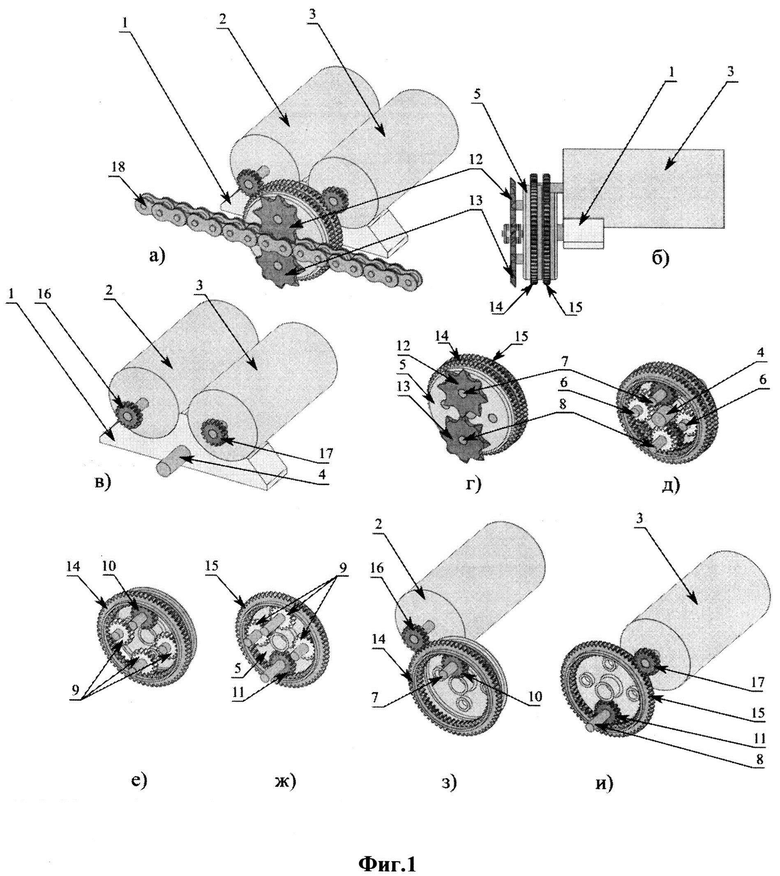
1. Цепной привод гетерогенного модульного реконфигурируемого мобильного робота, состоящий из шасси, на котором установлены привод верхней звездочки и привод нижней звездочки, а также ось корпуса, на которой расположен корпус, внутри которого слева и справа находятся две зафиксированные оси опорных шестерней, сверху находится свободно вращающаяся ось верхней звездочки, выходящая за пределы корпуса, а снизу - свободно вращающаяся ось нижней звездочки, выходящая за пределы корпуса, на каждой из осей опорных шестерней расположены по две свободно вращающиеся опорные шестерни, на оси верхней звездочки внутри корпуса ближе к шасси расположена свободно вращающаяся опорная шестерня, дальше от шасси внутри корпуса - жестко связанная с осью верхней звездочки приводная шестерня верхней звездочки, а снаружи корпуса - жестко связанная с осью верхней звездочки верхняя звездочка, на оси нижней звездочки внутри корпуса ближе к шасси расположена жестко связанная с осью нижней звездочки приводная шестерня нижней звездочки, дальше от шасси внутри корпуса - свободно вращающаяся опорная шестерня, а снаружи корпуса - жестко связанная с осью нижней звездочки внутренняя звездочка, двустороннее зубчатое колесо верхней звездочки вращается, охватывая внутренней стороной опорные шестерни, расположенные на двух осях опорных шестерней, опорную шестерню на оси нижней звездочки и приводную шестерню верхней звездочки, а внешней стороной входит в зацепление с приводной шестерней привода верхней звездочки, двустороннее зубчатое колесо нижней звездочки вращается, охватывая внутренней стороной опорные шестерни, расположенные на двух осях опорных шестерней, опорную шестерню на оси верхней звездочки и приводную шестерню нижней звездочки, а внешней стороной входит в зацепление с приводной шестерней привода нижней звездочки.
2. Способ управления цепным приводом гетерогенного модульного реконфигурируемого мобильного робота по п. 1, характеризующийся тем, что при движении вдоль линейного участка цепи привод верхней звездочки и привод нижней звездочки вращают с равной скоростью, во время преодоления угла цепи, направленного вверх, привод верхней звездочки вращают быстрее привода нижней звездочки, компенсируя необходимость преодоления большего расстояния, во время преодоления угла цепи, направленного вниз, привод нижней звездочки вращают быстрее привода верхней звездочки, компенсируя необходимость преодоления большего расстояния.
| Устройство для перемещения приводной цепи лебедки | 1981 |
|
SU954369A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| KR 1020130076825 A, 08.07.2013 | |||
| Водораспределительная головка гидромотора и установка ее для промывки сеток сгустителя | 1948 |
|
SU84249A1 |

