Изобретение относится к области приборостроения и может быть использовано для создания космических лабораторий нового типа - в виде приборов в формате спутников, с возможностью исследования заранее заложенных в них образцов или образцов, передаваемых в космосе с пилотируемых кораблей или с других спутников. В частности, в данном изобретении в качестве приборов, выполняемых в формате спутника, показаны сканирующие зондовые микроскопы (СЗМ), в количестве одной или более штук в одном спутнике. Эти микроскопы, известные своим таким качеством как высокое разрешение, вплоть до наблюдения атомов, могут выполнить в космосе или в атмосфере много актуальных исследований, таких как наблюдение процессов разрушения или изменения структуры поверхности образцов различных материалов при таких идущих из космоса воздействий, как солнечный ветер в виде потока быстрых ионов, как рентгеновское облучение, воздействие света большой интенсивности и попадание различных частиц высокой энергии. Актуальным является также исследование количества, формы и структуры падающих на установленные в СЗМ образцы естественно-космических микро- и нано- метеоритов, а также частиц пыли, образовавшихся от аварий и столкновений космических аппаратов, на орбитах различной высоты.
Известен сканирующий зондовый микроскоп, совмещенный с космическим аппаратом, предназначенный для работы в космическом пространстве, содержащий по меньшей мере один модуль зондовой микроскопии, установленный на корпусе космического аппарата и включающий сканирующий модуль с держателем зонда и закрепленным на нем зондом с острием, включающий также держатель образца, установленный на модуле предварительного сближения держателя образца с зондом, при этом сканирующий модуль и модуль предварительного сближения установлены на основании, содержащий также модуль питания и по меньшей мере один блок управления, который электрически сопряжен с модулем питания и модулем зондовой микроскопии [патент RU 2514083].
Недостаток этого устройства заключаются в высокой погрешности измерения, связанной с механическими вибрациями, передаваемыми от корпуса космического аппарата на модуль зондовой микроскопии.
Технический результат изобретения заключается в снижении погрешности измерения.
Сущность изобретения заключается в том, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере, включающий сканирующий модуль с держателем зонда и закрепленным на нем зондом с острием, включающий также держатель образца, установленный на модуле предварительного сближения держателя образца с зондом, при этом сканирующий модуль и модуль предварительного сближения установлены на основании, содержащий также модуль питания и по меньшей мере один блок управления, который электрически сопряжен с модулем питания и модулем зондовой микроскопии, введено шасси и как минимум один модуль космической связи, электрически сопряженный с блоком управления, при этом основание закреплено на шасси.
Существует вариант, в котором в комплекс введен модуль ориентации, электрически сопряженный с блоком управления.
Существует также вариант, в котором в комплекс введен по меньшей мере один модуль модификации зондов и образцов, установленный на основании. Существует также вариант, в котором в комплекс введено средство захвата, закрепленное на шасси.
Существует также вариант, в котором модуль питания включает по меньшей мере один аккумулятор.
Существует также вариант, в котором модуль питания включает по меньшей мере один аккумулятор и по меньшей мере одну солнечную батареею. Существует также вариант, в котором по меньшей мере одна солнечная батарея установлена на шасси с возможностью примыкания к нему и откидывания от него в рабочее положение.
Существует также вариант, в котором комплекс снабжен по меньшей мере одной защитной шторкой, установленной на шасси.
Существует также вариант, в котором в комплекс введен по меньшей мере один модуль оптического наблюдения, установленный на основании.
Существует также вариант, в котором в комплекс введен по меньшей мере один датчик температуры.
Существует также вариант, в котором в комплекс введен по меньшей мере один вязкоупругий демпфер, сопряженный с шасси и основанием.
Существует также вариант, в котором в комплекс введен по меньшей мере один первый фиксатор, установленный на основании и имеющий возможность сопряжения с модулем предварительного сближения.
Существует также вариант, в котором в комплекс введен по меньшей мере один второй фиксатор, установленный на основании и имеющий возможность сопряжения со сканирующим модулем.
Существует также вариант, в котором в комплекс введен по меньшей мере один третий фиксатор, установленный на основании и имеющий возможность сопряжения с держателем образца.
Существует также вариант, в котором в комплекс введен по меньшей мере один ограничитель перемещения держателя зонда, сопряженный через зазор с держателем зонда.
Существует также вариант, в котором на держателе образца установлена ловушка. Существует также вариант, в котором ловушка изготовлена из полированной меди. Существует также вариант, в котором ловушка изготовлена из полимера. Существует также вариант, в котором по меньшей мере один блок питания электрически сопряжен с двумя или более блоками управления.
Существует также вариант, в котором по меньшей мере один блок управления электрически сопряжен с двумя или более модулями зондовой микроскопии. Существует также вариант, в котором в комплекс введены по меньшей мере один магазин зондов и образцов с носителями зондов и носителями образцов, установленный на основании, и модуль передачи, установленный на основании, и имеющий возможность передачи носителей зондов и носителей образцов из магазина зондов и образцов на держатель зонда и держатель образца, и обратно. Существует также вариант, в котором в комплекс введено по меньшей мере одно приемное гнездо, расположенное на шасси, для установки в него носителей зондов или носителей образцов, при этом модуль передачи имеет возможность передачи носителей зондов и носителей образцов из приемного гнезда в магазин зондов и образцов, и обратно.
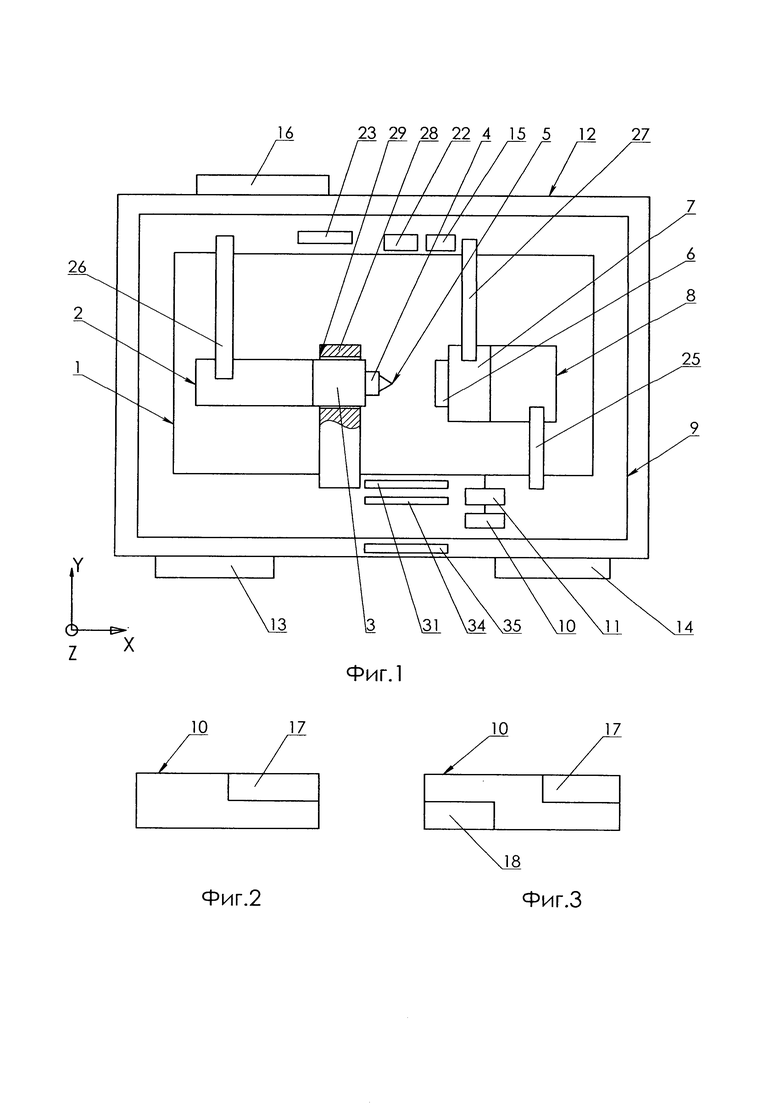
На фиг. 1 схематически изображен комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере.
На фиг. 2 изображен вариант выполнения блока питания, включающего аккумулятор.
На фиг. 3 изображен вариант выполнения блока питания, включающего аккумулятор и солнечную батарею.
На фиг. 4 схематически изображен комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере, включающий вязкоупругий демпфер, вид сбоку.
На фиг. 5 схематически изображен комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере, включающий вязкоупругий демпфер, вид сверху.
На фиг. 6 изображена ловушка, установленная на держателе образца.
На фиг. 7 изображен блок питания, электрически сопряженный с двумя или более
блоками управления.
На фиг. 8 изображен блок управления, электрически сопряженный с двумя или более модулями зондовой микроскопии.
На фиг.9 изображена схема передачи зондов и образцов в модуль зондовой микроскопии.
На фиг. 10 изображена схема электрических соединений комплекса зондовой микроскопии для работы в космическом пространстве и атмосфере.
Комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере содержит по меньшей мере один модуль зондовой микроскопии 1 (фиг. 1), включающий сканирующий модуль 2 с держателем зонда 3 и закрепленным на нем зондом 4 с острием 5. В качестве сканирующего модуля 2 можно использовать трубчатый пьезосканер [см., например, патент RU 2248682, патент RU 2169401, патент RU 2227363, патент RU 2199171], либо, например, пьезосканер на пьезобиморфах [см., например, патент RU 2210730]. В качестве сканирующего модуля 2 для работы не в атмосфере, а в условиях вакуума в космосе - можно использовать сверхвысоковакуумный сканер, который описан в [Сканер для сверхвысоковакуумного низкотемпературного сканирующего туннельного микроскопа, Логинов Б.А., Ельцов К.Н., Зайцев-Зотов С.В., Климов А.Н., Шевлюга В.М., Приборы и техника эксперимента. 2007. №3. С. 148-149].
В качестве держателя зонда 3 часто используется титановый фланец. В качестве зонда 4 сканирующего туннельного микроскопа можно использовать иглу, изготовленную из вольфрама или платины с острием 5, сформированным путем травления, имеющим радиус скругления в диапазоне 2 нм - 10 нм. Подробно подобные иглы и способы их изготовления описаны в патентах [RU 2389033, RU 42695]. В качестве зонда атомно-силового микроскопа можно использовать кантилеверы, например, марки CGS01 фирмы ТипсНано [https://tipsnano.ru/]. Подробно подобные зонды и способы их изготовления см. [патент RU 2349975; патент RU 2208763 патент RU 2297054; патент RU 2349975; В. Миронов. Основы сканирующей зондовой микроскопии. М: Техносфера, 2009. - 144 с.]. Для длительного использования в космосе можно также использовать алмазные иглы, описанные в [Алмазные монокристаллические зонды для атомно-силовой микроскопии, Копылов П.Г., Логинов Б.А., Исмагилов P.P., Образцов А.Н., Приборы и техника эксперимента. 2010. №4. С. 156-162]. В одном из вариантов зонд 4 (игла) может быть закреплен неразъемно на держателе зонда 3, например клеем. В другом варианте, зонд 4 (игла) может быть закреплен разъемно в осевом отверстии держателя зонда 3 на силах трения. Эти варианты не показаны. Но наиболее часто для установки зонда 4 в держатель зонда 3 используют носители зондов, которые могут быть изготовлены из магнитного материала и устанавливаться на держатель зонда 3 с помощью магнита, закрепленного в нем (не показан). Существует также вариант, в котором носитель зонда 3 устанавливают на держатель зонда 3 под пружинные захваты, закрепленные на нем (описано ниже). Модуль зондовой микроскопии 1 включает также держатель образца 7, установленный на модуле предварительного сближения 8 держателя образца 7 с зондом 4. Модуль предварительного сближения 8 может быть выполнен в виде каретки с пьезоинерциальными двигателями на направляющих. Модуль предварительного сближения может осуществлять перемещение держателя образца 7 не только в направлении к зонду 4 по координате X, но и в других направлениях, включая перпендикулярные к координате X ортогональные направления, соответственно Υ и Z, сближая, таким образом, с зондом 4 держатель образца 7 определенной его точкой. Подробно такие приводы описаны в патенте RU 2537363. В одном из вариантов образец 6 (если он выполнен из магнитного материала) устанавливают на держатель образца 7 с помощью магнита, закрепленного в нем (не показан). Существует также вариант, в котором образец 6 устанавливают на держатель образца 7 под пружинные захваты, закрепленные на нем (описано ниже). В комплексе зондовой микроскопии для работы в космическом пространстве и атмосфере оптимальным вариантом является использование носителя образца, аналогично носителю зонда (описано ниже). Подробно элементы сканирующих зондовых микроскопов описаны в [Сканирующая туннельная и атомно-силовая микроскопия, Логинов Б.Α., Μ.: МИФИ, 2008, 224 с.]. Сканирующий модуль 2 и модуль предварительного сближения 8 установлены на основании 9, в качестве которого можно использовать брусок из алюминиевого сплава. Модуль зондовой микроскопии 1 может не иметь геометрических форм и размеров, а структурно объединять элементы 2, 3, 4, 7 и 8. Комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере содержит также модуль питания 10 и по меньшей мере один блок управления 11, который электрически сопряжен с модулем питания 10 и модулем зондовой микроскопии 1. В качестве модуля питания 10 можно использовать систему электропитания спутниковой платформы ОрбиКрафт-Про от ООО Спутниковые инновационные космические системы [https://sputnix.ru]. В качестве блока управления 11 можно использовать материнскую плату с системой датчиков этой же спутниковой платформы ОрбиКрафт-Про от ООО Спутниковые инновационные космические системы [https://sputnix.ru]. Один из вариантов блока управления описан в патенте RU 2428700. В качестве отличительных признаков в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введено шасси 12 и как минимум один модуль космической связи 13. При этом основание 9 закреплено на шасси 12. В одном из вариантов модуль питания 10 и блок управления 11 могут быть закреплены на основании, а модуль космической связи 13 может быть закреплен на шасси 12. Возможны и другие варианты, например, элементы 10, 11 и 13 - закреплены на шасси 12, или - на основании 9 (не показано). В качестве шасси 12 можно использовать корпус CubeSat 3U спутниковой платформы ОрбиКрафт-Про от ООО Спутниковые инновационные космические системы [https://sputnix.ru]. В качестве модуля космической связи 13 можно использовать УКВ-приемопередатчик спутниковой платформы ОрбиКрафт-Про от ООО Спутниковые инновационные космические системы [https://sputnix.ru]. Существует вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен модуль ориентации 14, закрепленный, например, на шасси 12, либо на основании 9 (не показано). В качестве модуля ориентации 14 можно использовать модуль, состоящий из двух частей - передатчика [https://sputnix.ru/ru/priboryi/pribory-cubesat/peredatchik-x-diapazona] и антенны [https://sputnix.ru/ru/priboryi/pribory-cubesat/antenna-x-diapazona].
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один модуль модификации зондов и образцов 15, установленный на основании 9. В качестве модуля модификации зондов и образцов 15 можно использовать малогабаритный магнетрон [см., например, https://vaclab.ru/devices/magnetrons/round_magnetrons/magnetrion_d100 или http://www.actan.ru/e_spsyscomp.html#sp], который напыляет на острие 5 зонда 4 различные металлы, например, платину, и новые образующиеся на острие 5 зерна этого металла нанометрового размера начинают работать как новые острия. Модуль модификации зондов и образцов 15 включает блок питания мощностью, например, до 25 Вт, а также малогабаритную емкость (например, 0,02…0,1 л) с аргоном невысокого давления (например, до 4 атмосфер) и электрически управляемым клапаном открытия/закрытия выходного отверстия, направленного в сторону острия зонда. В одном из вариантов модуль модификации зондов и образцов 15 может представлять собой спираль из распыляемого материала (например, вольфрама), попадание которого на зонд или образец модифицируют их оналогичным вышеописанным образом. Модуль модификации зондов и образцов 15 может использоваться, например, для напыления на образец 6 тонких пленок для закрепления упавших на образец 6 частиц пыли). Возможен также вариант, в котором используется несколько модулей модификации зондов и образцов 15. Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введено средство захвата 16, закрепленное на шасси 12. Средство захвата 16 может представлять собой карабин, к которому прикреплен гибкий трос, выполненный, например, из таких материалов как нержавеющая сталь или капролон (не показано). Один карабин необходим, например, для того, чтобы оттолкнуть от космического аппарата или автоматически отстрелить комплекс зондовой микроскопии для работы в открытом космосе, а потом иметь возможность, например, подтянуть комплекс обратно. Средство захвата 16 может представлять собой два карабина (не показано), которые можно использовать для закрепления комплекса зондовой микроскопии наружи космического аппарата на как минимум двух гибких тросах в качестве растяжек (не показано). Такой вариант возможен, например, для смены образца 6 и иглы 4, или же, например, для полнофункциональной его работы, включая сканирование образцов 6 и отсылку данных по модулю космической связи 13. Средство захвата 16 может также представлять собой штангу с устройством фиксации на конце (например, штырем), которым комплекс зондовой микроскопии может присоединяться к другим космическим объектам, имеющим отверстие для штыря (не показано). Эти космические объекты могут представлять собой такие же комплексы зондовой микроскопии, и пристыковка к ним может быть с целью передачи на них или получения с них образцов или зондов. При этом может осуществляться также электрического подсоединения к ним с целью получения или передачи питания или данных. Средство захвата 16 может также представлять собой присоединительное отверстие с фиксаторами, к которому могут стыковаться своими штангами другие космические объекты (не показано).
Существует вариант, в котором модуль питания 10 (фиг. 2) включает по меньшей мере один аккумулятор 17, в качестве которого можно использовать блок литий-ионных аккумуляторов SXC-BAT-03 спутниковой платформы ОрбиКрафт-Про от ООО Спутниковые инновационные космические системы [https://sputnix.ru]. Существует также вариант, в котором модуль питания 10 (фиг. 3) включает по меньшей мере один аккумулятор 17 и по меньшей мере одну солнечную батареею 18, в качестве которой можно использовать кремниевую солнечную панель Sputnix Orbicraft-Pro SXC-SSS-03 спутниковой платформы ОрбиКрафт-Про от ООО Спутниковые инновационные космические системы [https://sputnix.ru]. На фиг. 3 солнечная батарея 18 показана внутри модуля питания 10 структурно. Геометрически она находится вне его.
Существует также вариант, в котором по меньшей мере одна солнечная батарея 18 установлена на шасси 12 с возможностью примыкания к нему и откидывания от него в рабочее положение. Это может быть осуществлено за счет использования первых приводов 19, в качестве которых можно использовать привод «8MAV - Vacuum Compatible Motorized Actuator» фирмы Standa [www.standa.lt]. В наиболее предпочтительном варианте можно использовать двенадцать солнечных батарей 18. В этом случае часть солнечных батарей 18 будет соединяться с другими солнечными батареями 18 также приводами 19 (не показано).
Существует также вариант, в котором комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере снабжен по меньшей мере одной защитной шторкой 20, установленной на шасси 12. Это может быть осуществлено за счет использования вторых приводов 21, в качестве которых можно использовать моторизированную диафрагму «8MID10-40 - Motorized Iris Diaphragm» фирмы Standa [www.standa.lt]. В одном из вариантов одна или более защитных шторок 20 могут располагаться рядом с зонами доступа к держателю зонда 3 и держателю образца 7. В качестве материала защитных шторок можно использовать листовую нержавеющую сталь.
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один модуль оптического наблюдения 22, установленный на основании 9. В качестве модуля оптического наблюдения 22 можно использовать USB-оптический микроскоп со встроенной камерой (без окуляров), либо оптические микроскопы [см., например, https://www.levenhuk.ru/products/levenhuk-microscope-dtx-3 и https://www.lomo.ru/production/grazhdanskogo-naznaacheniya/mikroskopy/mikroskopy-tsifrovye/mikroskop-ekspert/]. Также модуль оптического наблюдения 22 может включать несколько оптических микроскопов, которые могут исполнять разные функции: например - снятие кадров поверхности образца 6 с увеличениями меньше чем в сканирующем микроскопе, для наблюдения картины в целом, в том числе для того чтобы если будет зафиксировано попадание частицы пыли или метеорита, или какое-то изменение поверхности образца 6 в каком-то месте, было можно в автоматическом или ручном режимах переместить образец 6 на держателе образца 6 именно так, чтобы зонд 4 мог сканировать необходимое место образца 6. С помощью модуля оптического наблюдения 22 возможно также наблюдение за острием 5 зонда 4 с целью его контроля. Возможно также наблюдение за сканирующим модулем 2 с целью контроля его работы. Возможно также наблюдение за окружающим космическим пространством для ориентации в нем. Возможно также наблюдение за загрузкой зондов и образцов.
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один датчик температуры 23, в качестве которого можно использовать датчик температуры в виде микрочипа TMP36GT9Z (см., например, на сайте поставщика www.chipdip.ru). Возможен вариант использования в комплексе и других датчиков, таких как датчики магнитного поля (см, например, датчик Холла однополярный цифровой SS449A на сайте поставщика www.chipdip.ru), датчики света (см, например, фотодиод ОРТ101Р на сайте поставщика www.chipdip.ru), датчики ускорения (см, например, 3-осевой цифровой акселерометр ADXL345BCCZ на сайте поставщика www.chipdip.ru), вакуумные датчики давления (см, например, вакуумметр Байярда-Альперта с датчиком Пирани BPG402-S на сайте поставщика https://erstvak.com), и другие датчики. В графических материалах эти датчики не указаны. Они структурно могут входить в блок управления 11.
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один вязкоупругий демпфер 24, сопряженный с шасси 12 и основанием 9. В качестве вязкоупругого демпфера 24 можно использовать конструкции на основе резины [см., например, https://spb.v-kip.com/amortizator-ad-2a или https://benzoinstmment.ru/intemet_magazin/amortizatori/amortizatori-kompk champion-55250245254251256-nl.
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один первый фиксатор 25, установленный на основании 9 и имеющий возможность сопряжения с модулем предварительного сближения 8. В качестве первого фиксатора 25 можно использовать линейные приводы в виде набора пьезокерамических колец [см., например, каталог Physik Instruments, 2001 «MicroPositioning, NanoPositioning, Nano Automatic))].
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один второй фиксатор 26, установленный на основании 9 и имеющий возможность сопряжения со сканирующим модулем 2. В качестве второго фиксатора 26 можно использовать линейные приводы в виде набора пьезокерамических колец [см., например, каталог Physik Instruments, 2001 «MicroPositioning, NanoPositioning, NanoAutomatic))]. Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один третий фиксатор 27, установленный на основании 9 и имеющий возможность сопряжения с держателем образца 7. В качестве третьего фиксатора 27 можно использовать линейные приводы в виде набора пьезокерамических колец [см., например, каталог Physik Instruments, 2001 «MicroPositioning, NanoPositioning, NanoAutomatio)].
Существует также вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один ограничитель перемещения держателя зонда 28 с отверстием, сопряженным через зазор 29 с держателем зонда 3. Ограничитель перемещения держателя зонда 28 может также представлять втулку, закрепленную на основании 9 (не показано). В этом случае держатель зонда 3 должен иметь цилиндрическую образующую, сопряженную через зазор 50 мкм - 100 мкм с внутренней поверхностью втулки иди отверстием держателя зонда 28.
Существует вариант, в котором на держателе образца 7 установлена ловушка 30 (фиг. 6). В наиболее предпочтительном варианте ловушка 30 может быть закреплена на носителе образцов (см. ниже).
В одном из вариантов ловушка 30 изготовлена из полированной меди марки М0б. Высота микронеровностей поверхности ловушки 30 из меди, обращенной в сторону зонда 4, может быть в диапазоне 1-2 нм.
В другом варианте ловушка 30 изготовлена из полимера в виде полиэтилена низкого давления. Высота микронеровностей поверхности ловушки 30 из полимера, обращенной в сторону зонда 4, может быть в диапазоне 2-5 нм.
Существует вариант, в котором по меньшей мере один блок питания 10 (фиг. 7) электрически сопряжен с двумя или более блоками управления 11. Это может быть обеспечено простым электрическим соединением.
Существует также вариант, в котором по меньшей мере один блок управления 11 (фиг. 8) электрически сопряжен с двумя или более модулями зондовой микроскопии 1. Это может быть обеспечено простым электрическим соединением. Существует вариант, в котором в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один магазин зондов и образцов 31 (фиг. 9) с носителями зондов 32 и носителями образцов 33, установленный на основании 9. В одном из вариантов на носителе образцов 33 может быть закреплена ловушка 30. Магазин зондов и образцов 31 может быть выполнен в виде планки 34 с гнездами 35, сопряженной с первым приводом 36 по координате X, и установлен на основании 9. На основании 9 также установлен модуль передачи 37 со вторым приводом 38 по координатам Χ, Υ, Z, имеющий возможность передачи носителей зондов 32 и носителями образцов 33 из магазина зондов и образцов 31 на держатель зонда 3 и держатель образца 7, и обратно.
В качестве модуля передачи 37 и его элементов можно использовать решения, описанные в патентах [RU 2244948, RU 2380785, RU 2244948].
Существует вариант, в котором на шасси 12 расположено по меньшей мере одно приемное гнездо 39, для установки в него носителя зондов 32 или носителя образцов 33 из внешних источников, которыми могут быть манипуляторы пилотируемых или беспилотные космических аппаратов. Существует вариант, в котором описанную установку выполняет космонавт, вышедший в космическое пространство. Приемное гнездо 39 сопряжено с модулем передачи 37, который имеет возможность передачи носителей зондов 32 или носителей образцов 33 из приемного гнезда 39 в магазин зондов и образцов 31, и обратно. Один из вариантов закрепления носителей зондов 32 и носителей образцов 33 в магазине зондов и образцов 31 может быть магнитный (планка 34 включает магниты (не показаны), а носители зондов 32 и носители образцов 33 изготовлены из магнитного материала). При этом возможен вариант закрепления носителей зондов 32 и носителей образцов 33 соответственно на держателе зонда 3 и держателе образца 7 первой пружины 40 и второй пружины 41. Возможны и иные варианты крепления носителей зондов 32 и носителей образцов 33: только магнитные, или только с использованием пружин.
Технические решения для обеспечения работы СЗМ в условиях низких температур, высоких температур и в сверхвысоком вакууме описаны в патентах [RU 2169954, RU 2271538, RU 2258901, RU 2244948, RU 2152103, RU 2161343]. В качестве приводов 36 и 38 можно использовать изделия из каталога MDC. High Vacuum Components. 1989. 209р.
Блок управления 11 (фиг. 10) электрически соединен с элементами комплекса зондовой микроскопии простыми электрическими соединениями и проводами. Комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере функционирует следующим образом.
В простейшем варианте в лабораторных условиях на Земле на держателе зонда 3 закрепляют зонд 4 с острием 5, а на держателе образца 7 закрепляют образец 6. После этого шасси 12 с установленными на нем элементами (комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере) размещают в специальном отсеке ракеты, из которого производится выброс на определенную орбиту в автоматическом режиме или же космонавтом после пристыковки к пилотируемому кораблю. Возможен также вариант вывода комплекса в атмосферу Земли, других планет или в пространство около других космических тел посредством других летных средств, например, посредством метеорологического зонда, самолета, геликоптера или квадрокоптера. При выводе комплекса с самолета комплекс может спускаться на парашюте, проводя измерения в атмосфере.
По команде, переданной через модуль космической связи 13, блок управления 11, используя модуль предварительного сближения 8, осуществляет подвод держателя образца 7 с образцом 6 определенной его точкой к зонду 4. После этого выполняется сканирование зондом 4 поверхности образца 6 и передача информации посредством модуля космической связи 13 на станции связи на Земле, при этом передача информации в виде полученного при сканировании кадра для надежности передачи может осуществляться не целиком, а, например, построчно, ввиду того что модуль космической связи 13 из-за вращения вокруг Земли может находиться в области уверенной связи с каждой из станций связи на земле лишь определенный интервал времени порядка нескольких минут.
При сканировании зондом 4 поверхности образца 6, используя модуль ориентации 14, закрепленный на шасси 12, устанавливают стационарное положение комплекса зондовой микроскопии для работы в космическом пространстве и атмосфере относительно Солнца.
В процессе эксплуатации комплекса используют модуль модификации зондов и образцов 15, например, для заострения зонда 4. Воздействие посредством модуля модификации зондов и образцов 15 на образец 6 возможно в случае необходимости закрепления попавшей на образец 6 из космоса частицы путем, например, напыления на образец 6 тонкой равномерной пленки выбранного для этой частицы материала, например, вольфрама, с толщиной пленки порядка 1 нм.
Использование средства захвата 16, возможно, например, когда комплекс эксплуатируется при соединении с космическим аппаратом (не показан) посредством гибкого троса, например, для подтягивания его к космонавту, вышедшему в открытый космос, с целью профилактики комплекса, ремонта, замены зондов и образцов (также см. выше).
Использование модуля питания 10, включающего по меньшей мере один аккумулятор 17, целесообразно в случае абсолютной автономности комплекса, а также с целью уменьшения шумов от первичного источника питания.
Использование модуля питания 10, включающего по меньшей мере один аккумулятор 17 и по меньшей мере одну солнечную батареею 18 целесообразно в случае длительного использования комплекса, для возможности периодической подзарядки аккумуляторов при нахождении комплекса в области засветки его светом, например, от Солнца.
В одном из вариантов по меньшей мере одна солнечная батарея 18, установленная на шасси 12 с возможностью примыкания к нему и откидывания от него в рабочее положение, осуществляет выход в это положение после выведения комплекса в космическое пространство.
В одном из вариантов по меньшей мере одна защитная шторка 20 защищает зонд 4 и образец 6 от внешних воздействий при его транспортировке до начала функционирования комплекса.
Модуль оптического наблюдения 22 используют для наблюдения за зондом 4 и образцом 5 (подробнее см выше).
Для устранения искажений кадра ввиду изменений характеристик элементов СЗМ от его температуры используют датчик температуры 23. В каждый момент сканирования, в частности каждая строка передается на Землю с информацией о температуре ее снятия.
Первый фиксатор 25 сопрягают с модулем предварительного сближения 8, второй фиксатор 26 сопрягают со сканирующим модулем 2 и третий фиксатор 27 сопрягают с держателем образца 7 во время ударных нагрузок на комплекс. В процессе использования ловушки 30, изготовленной из полированной меди, исследуют частички пыли и небольшие метеориты, внедренные в медь, либо наблюдают кратеры от воздействия этих объектов. Те же измерения будут проводиться при снижении комплекса перед падением его на Землю, в том числе с целью получения информации о плотности пыли на разных орбитах.
В процессе использования ловушки 30, изготовленной из полимера, исследуют, например, органические молекулы, привнесенные из космоса и захваченные ей. Использование блока питания 10, электрически сопряженного с двумя или более блоками управления 11 целесообразно для экономии питания.
Использование блока управления 11, электрически сопряженного с двумя или более модулями зондовой микроскопии 1 целесообразно при необходимости проводить идентичные по своим параметрам, например, размеру поля сканирования, сканирования во всех модулях зондовой микроскопии, например, с целью получения возможности усреднения полученных из всех модулей зондовой микроскопии данных, с целью уменьшения погрешности итоговых результатов. Наиболее часто при функционировании комплекса используют по меньшей мере один магазин зондов и образцов 31 с носителями зондов 32 и носителями образцов 33, установленный на основании 9. Модуль передачи 37, установленный на основании 9, сначала забирает носитель зондов 32 с использованным зондом 4 и носитель образцов 33 с исследованным образцом 6 и передает их в свободные гнезда 35 магазина зондов и образцов 31. После этого модуль передачи 37 забирает из магазина зондов и образцов 31 носитель зондов 32 с неиспользованным зондом 4 или носитель образцов 33 с новым образцом 6 и передает их соответственно на держатель зонда 3 или держатель образца 7. Загрузку и выгрузку ловушки 30 осуществляют аналогично. Первый привод 36 при этом подводит магазина зондов и образцов 31 (например, по координате X) в наиболее удобное положение (например, самое близкое к модулю передачи 37) для того, чтобы второй привод 38 модуля передачи 37 смог дотянуться одновременно и до нужного гнезда 35 и до места установки передаваемых объектов в держателя зонда 3 под первую пружину 40 или в держатель образца 7 под вторую пружину 41.
Существует также вариант, в котором используют приемное гнездо 39, расположенное на шасси 12, для установки в него носителя зондов 32 или носителя образцов 33 из внешних источников. В этом случае соответственно модуль передачи 37 передает носители зондов 32 и носители образцов 33 из приемного гнезда 39 в магазин зондов и образцов 31, и обратно.
Подробно функционирование зондовых микроскопов см. в [Сканирующие зондовые микроскопы, Б.А. Логинов, С.Б. Нестеров, О.С. Зилова, Н.Р. Сабирзянов, М.: МЭИ, 2007, 199 с.]
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере, содержащий по меньшей мере один модуль зондовой микроскопии 1, включающий сканирующий модуль 2 с держателем зонда 3 и закрепленным на нем зондом 4 с острием 5, включающий также держатель образца 7, установленный на модуле предварительного сближения 8 держателя образца 7 с зондом 4, при этом сканирующий модуль 2 и модуль предварительного сближения 8 установлены на основании 9, содержащий также модуль питания 10 и по меньшей мере один блок управления 11, который электрически сопряжен с модулем питания 10 и модулем зондовой микроскопии 1, введено шасси 12 и как минимум один модуль космической связи 13, электрически сопряженный с блоком управления 11, при этом основание 9 закреплено на шасси 12, снижает погрешность измерения за счет отсутствия механического контакта с источниками вибраций (корпусом космического корабля), которые увеличивают механические шумы комплекса и приводят к нефункциональным перемещениям зонда 4 и образца 6 друг относительно друга в процессе измерений.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен модуль ориентации 14, электрически сопряженный с блоком управления 11, обеспечивает ориентацию комплекса относительно Солнца, чтобы уменьшить термодрейфы. При этом может быть ликвидировано вращение комплекса, что уменьшит силовые воздействия на его элементы и его механические дрейфы. Эти первичные технические результаты снизят погрешность измерения. Подробно технологии космической ориентации описаны в патенте [RU 2264954]. То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один модуль модификации зондов и образцов 15, установленный на основании 9, снижает погрешность измерения за счет возможности уменьшения радиуса острия 5 в процессе эксплуатации комплекса. Влияние радиуса острия 5 на разрешение СЗМ подробно описано в [Сканирующая туннельная и атомно-силовая микроскопия, Логинов Б.Α., Μ.: МИФИ, 2008, 224 с.]. При этом попавшие на образец 6 космические частицы могут закрепляться модулем модификации зондов образцов 15 на поверхности образца 6 (при напылении на них пленки). При этом устраняется раскачка частиц за счет взаимодействия с 4 зондом и на эту величину уменьшается погрешность исследования частиц. То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введено средство захвата 16, закрепленное на шасси 12, упрощает эксплуатацию комплекса, в процессе замены зондов и образцов, минимизирует воздействие на него нефункциональных ударных нагрузок и повышает надежность, сохраняя первичные механические настройки и первичную погрешность измерения. То, что модуль питания 10 включает по меньшей мере один аккумулятор 17 снижает погрешность измерения за счет снижения исходных шумов источника питания, так как у аккумуляторов они ниже, чем у источников питания от сети ввиду отсутствия переменной составляющей.
То, что модуль питания 10 включает по меньшей мере один аккумулятор 17 и по меньшей мере одну солнечную батарею 18 дополнительно снижает погрешность измерения за счет поддержания напряжения аккумулятора на постоянном уровне за счет зарядки его от солнечных батарей 18.
То, что по меньшей мере одна солнечная батарея 18 установлена на шасси 12 с возможностью примыкания к нему и откидывания от него в рабочее положение обеспечивает надежную транспортировку комплекса и выход его в космическое пространство, что минимизирует воздействие на него нефункциональных ударных нагрузок, сохраняя первичные механические настройки и первичную погрешность измерения.
То, что комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере снабжен по меньшей мере одной защитной шторкой 20, установленной на шасси 12 защищает его от внешних воздействий.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один модуль оптического наблюдения 22, установленный на основании 9, позволяет контролировать функционирование комплекса, оптимизировать режим эксплуатации и снижает погрешность измерения. То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один датчик температуры 23 снижает погрешность измерения. При изменении температуры все компоненты комплекса зондовой микроскопии изменяют свои линейные размеры, что приводит к смещениям в кадрах, а пьезосканер дополнительно к этому изменяет свои параметры чувствительности, что приводит к искажениям кадров. Измерение температуры позволяет ввести математические компенсации смещений и искажений кадров. То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один вязкоупругий демпфер 24, сопряженный с шасси 12 и основанием 9 минимизирует воздействие на него нефункциональных ударных нагрузок и повышает надежность, сохраняя первичные механические настройки и первичное разрешение комплекса. Кроме того, вязкоупругий демпфер 24 уменьшает внешние ударные импульсы и исключает за счет этого выбросы в кадре, возникающие из-за нефункциональной раскачки элементов конструкции при ударах. То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один первый фиксатор 25, установленный на основании 9 и имеющий возможность сопряжения с модулем предварительного сближения 8, повышает надежность работы комплекса за счет устранения возможных смещений элементов комплекса за пределы их номинальных положений из-за внешних ударов, таким образом сохраняет первичные механические настройки и первичное разрешение комплекса.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один второй фиксатор 26, установленный на основании 9 и имеющий возможность сопряжения со сканирующим модулем 2, повышает надежность комплекса за счет минимизации ударных нагрузок на прецизионные элементы, сохраняет первичные механические настройки и первичное разрешение комплекса.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один третий фиксатор 27, установленный на основании 9 и имеющий возможность сопряжения с держателем образца 7, повышает надежность комплекса за счет минимизации ударных нагрузок на прецизионные элементы, сохраняет первичные механические настройки и первичное разрешение комплекса.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введен по меньшей мере один ограничитель перемещения держателя зонда 28, сопряженный через зазор 29 с держателем зонда 3, повышает надежность комплекса за счет минимизации особо сильных ударных нагрузок на сканирующий модуль 2, сохраняет первичные механические настройки и первичное разрешение комплекса.
То, что на держателе образца 7 установлена ловушка 30 расширяет арсенал исследовательских методик комплекса и снижает погрешность измерения комплекса за счет закрепления попадающих на поверхность ловушки 30 частиц и устранения их вибраций при сканировании от взаимодействия с зондом 4.
То, что ловушка 30 изготовлена из полированной меди расширяет арсенал исследовательских методик комплекса и снижает погрешность измерения комплекса для быстрых твердых объектов, фиксирующихся в меди.
То, что ловушка 30 изготовлена из полимера расширяет арсенал исследовательских методик комплекса и снижает погрешность комплекса для объектов, лучше фиксирующихся в мягком полимере.
То, что по меньшей мере один блок питания 10 электрически сопряжен с двумя или более блоками управления 11 снижает погрешность измерения в тех модулях зондовой микроскопии комплекса, в которых не нужно использовать блоки питания, за счет отсутствия электромагнитных и наводок помех от них.
То, что по меньшей мере один блок управления 11 электрически сопряжен с двумя или более модулями зондовой микроскопии 1 снижает погрешность измерения комплекса за счет появления возможности синхронного сканирования одинаковых образцов и появляющейся из-за этого возможности усреднения численных параметров, характеризующих рельеф поверхности образцов.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введены по меньшей мере один магазин зондов и образцов 31 с носителями зондов 32 и носителями образцов 33, установленный на основании 9, и модуль передачи 37, установленный на основании 9 и имеющий возможность передачи носителей зондов 32 и носителей образцов 33 из магазина зондов и образцов 31 на держатель зонда 3 и держатель образца 7, и обратно, позволяет повысить производительность и арсенал измерений благодаря замене образцов, а благодаря своевременной замене зондов 4, например, с затупленным острием 5 позволяет снизить погрешность измерений.
То, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере введено по меньшей мере одно приемное гнездо 39, расположенное на шасси 12, для установки в него носителей зондов 32 или носителей образцов 33, при этом модуль передачи 37 имеет возможность передачи носителей зондов 32 и носителей образцов 33 из приемного гнезда 39 в магазин зондов и образцов 31, и обратно позволяет дополнительно повысить производительность и арсенал измерений благодаря замене образцов, а благодаря своевременной замене зондов 4, например, с затупленным острием 5 - снизить погрешность измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С КОСМИЧЕСКИМ АППАРАТОМ | 2012 |
|
RU2514083C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОНТРОЛИРУЕМОЙ СРЕДОЙ ИЗМЕРЕНИЯ | 2008 |
|
RU2401983C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С УСТРОЙСТВОМ ДЛЯ ФУНКЦИОНИРОВАНИЯ МНОГОЗОНДОВОГО ДАТЧИКА | 2013 |
|
RU2538412C1 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2308782C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| АНАЛИЗАТОР МНОГОФУНКЦИОНАЛЬНЫЙ | 2013 |
|
RU2561234C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЭЛЕКТРОХИМИЧЕСКОЙ ЯЧЕЙКОЙ | 2003 |
|
RU2248600C1 |




Изобретение относится к области приборостроения и может быть использовано для создания автономных космических лабораторий на основе сканирующих зондовых микроскопов. Сущность изобретения заключается в том, что в комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере, содержащий по меньшей мере один модуль зондовой микроскопии 1, включающий сканирующий модуль 2 с держателем зонда 3 и закрепленным на нем зондом 4 с острием 5, включающий также держатель образца 7, установленный на модуле предварительного сближения 8 держателя образца 7 с зондом 4, где сканирующий модуль 2 и модуль предварительного сближения 8 установлены на основании 9, содержащий также модуль питания 10 и по меньшей мере один блок управления 11, который электрически сопряжен с модулем питания 10 и модулем зондовой микроскопии 1, введено шасси 12 и как минимум один модуль космической связи 13, электрически сопряженный с блоком управления 11, при этом основание 9 закреплено на шасси 12. Технический результат изобретения заключается в снижении погрешности измерения. 21 з.п. ф-лы, 10 ил.
1. Комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере, содержащий по меньшей мере один модуль зондовой микроскопии, включающий сканирующий модуль с держателем зонда и закрепленным на нем зондом с острием, включающий также держатель образца, установленный на модуле предварительного сближения держателя образца с зондом, при этом сканирующий модуль и модуль предварительного сближения установлены на основании, содержащий также модуль питания и по меньшей мере один блок управления, который электрически сопряжен с модулем питания и модулем зондовой микроскопии, отличающийся тем, что в него введено шасси и как минимум один модуль космической связи, электрически сопряженный с блоком управления, при этом основание закреплено на шасси.
2. Устройство по п. 1, отличающееся тем, что в него введен модуль ориентации, электрически сопряженный с блоком управления.
3. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один модуль модификации зондов и образцов, установленный на основании.
4. Устройство по п. 1, отличающееся тем, что в него введено средство захвата, закрепленное на шасси.
5. Устройство по п. 1, отличающееся тем, что модуль питания включает по меньшей мере один аккумулятор.
6. Устройство по п. 1, отличающееся тем, что модуль питания включает по меньшей мере один аккумулятор и по меньшей мере одну солнечную батареею.
7. Устройство по п. 6, отличающееся тем, что по меньшей мере одна солнечная батарея установлена на шасси с возможностью примыкания к нему и откидывания от него в рабочее положение.
8. Устройство по п. 1, отличающееся тем, что оно снабжено по меньшей мере одной защитной шторкой, установленной на шасси.
9. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один модуль оптического наблюдения, установленный на основании.
10. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один датчик температуры.
11. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один вязкоупругий демпфер, сопряженный с шасси и основанием.
12. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один первый фиксатор, установленный на основании и имеющий возможность сопряжения с модулем предварительного сближения.
13. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один второй фиксатор, установленный на основании и имеющий возможность сопряжения со сканирующим модулем.
14. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один третий фиксатор, установленный на основании и имеющий возможность сопряжения с держателем образца.
15. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один ограничитель перемещения держателя зонда, сопряженный через зазор с держателем зонда.
16. Устройство по п. 1, отличающееся тем, что на держателе образца установлена ловушка.
17. Устройство по п. 16, отличающееся тем, что ловушка изготовлена из полированной меди.
18. Устройство по п. 16, отличающееся тем, что ловушка изготовлена из полимера.
19. Устройство по п. 1, отличающееся тем, что по меньшей мере один блок питания электрически сопряжен с двумя или более блоками управления.
20. Устройство по п. 1, отличающееся тем, что по меньшей мере один блок управления электрически сопряжен с двумя или более модулями зондовой микроскопии.
21. Устройство по п. 1, отличающееся тем, что в него введены по меньшей мере один магазин зондов и образцов с носителями зондов и носителями образцов, установленный на основании, и модуль передачи, установленный на основании и имеющий возможность передачи носителей зондов и носителей образцов из магазина зондов и образцов на держатель зонда и держатель образца, и обратно.
22. Устройство по п. 21, отличающееся тем, что в него введено по меньшей мере одно приемное гнездо, расположенное на шасси, для установки в него носителей зондов или носителей образцов, при этом модуль передачи имеет возможность передачи носителей зондов и носителей образцов из приемного гнезда в магазин зондов и образцов, и обратно.
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С КОСМИЧЕСКИМ АППАРАТОМ | 2012 |
|
RU2514083C2 |
| Lapshin, Rostislav V | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| CN 113428384 A, 24.09.2021. | |||

