Изобретение относится к измерительной технике и может быть использовано для измерения состояния поверхности космического аппарата, а также других поверхностей в нанометровом диапазоне.
Известен сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта. Оно содержит измерительный блок, включающий зондовый модуль с одним зондом, имеющим одно острие, сканирующее устройство, сопряженное с зондовым модулем и блок сближения зондового модуля с зоной измерения, а также блок управления, сопряженный с измерительным блоком. При этом зона измерения представляет собой поверхность образца, после модификации, расположенного на держателе, расположенном с возможностью взаимодействия с зондом [1].
Недостаток этого устройства заключается в том, что его нельзя использовать в открытом космосе.
Целью изобретения является исследование поверхности различных материалов, подвергшихся внешнему воздействию в условиях эксплуатации в открытом космосе.
Технический результат изобретения заключается в расширении функциональных возможностей.
Указанный технический результат достигается тем, что в сканирующем зондовом микроскопе, совмещенном с космическим аппаратом, содержащем измерительный блок, включающий зондовый модуль с, по меньшей мере, одним зондом, имеющим, по меньшей мере, одно острие, сканирующее устройство, сопряженное с зондовым модулем, и блок сближения зондового модуля с, по меньшей мере, одной зоной измерения, а также блок управления, имеющий возможность взаимодействия с измерительным блоком, измерительный блок расположен снаружи космического аппарата, включающего герметичный корпус, и сопряжен с ним посредством соединительного элемента.
Возможен вариант, в котором соединительный элемент выполнен в виде жесткой связи, а зона измерения расположена на наружной поверхности герметичного корпуса.
Возможен также вариант, в котором соединительный элемент выполнен в виде гибкой связи, а, по меньшей мере, одна зона измерения сопряжена с автономным носителем, соединенным с измерительным блоком.
Возможны также варианты, в которых блок управления расположен снаружи аппарата, или блок управления расположен во внутри полости аппарата и сопряжен с измерительным блоком электрически или посредством радиосвязи.
Возможен также вариант, в котором автономный носитель выполнен в виде подвижного элемента, имеющего перемещение относительно зондового модуля, а зоны измерения расположены на подвижном элементе.
Возможен также вариант, в котором измерительный блок расположен внутри защитного кожуха.
Возможен также вариант, в котором сканирующее устройство и блок сближения сжаты с использованием пружин.
Возможен также вариант, в котором зондовый модуль включает пружинные электрические контакты, сопряженные с зондом.
Возможен также вариант, в котором в устройство введена кассета с зондов, установленная с возможностью их замены.
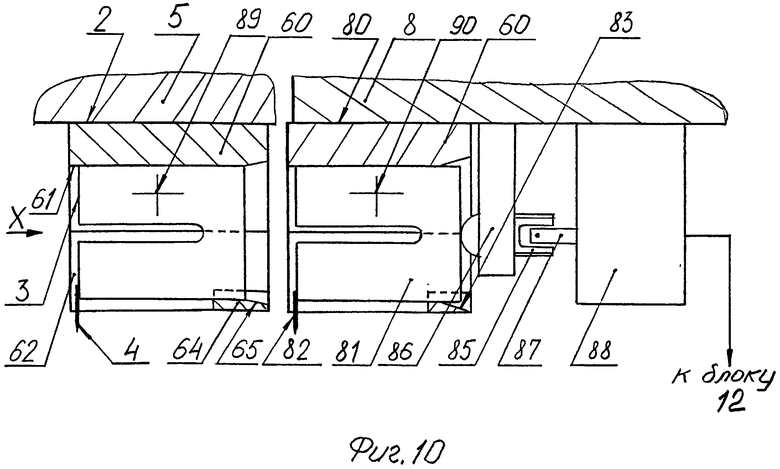
На фиг.1 изображен сканирующий зондовый микроскоп, совмещенный с космическим аппаратом.
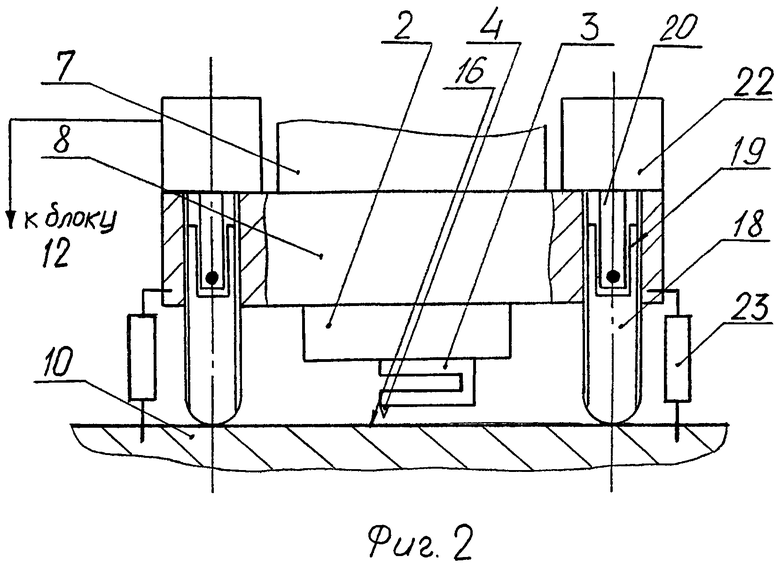
На фиг.2 изображен вариант выполнения жесткой связи между измерительным блоком и космическим аппаратом.
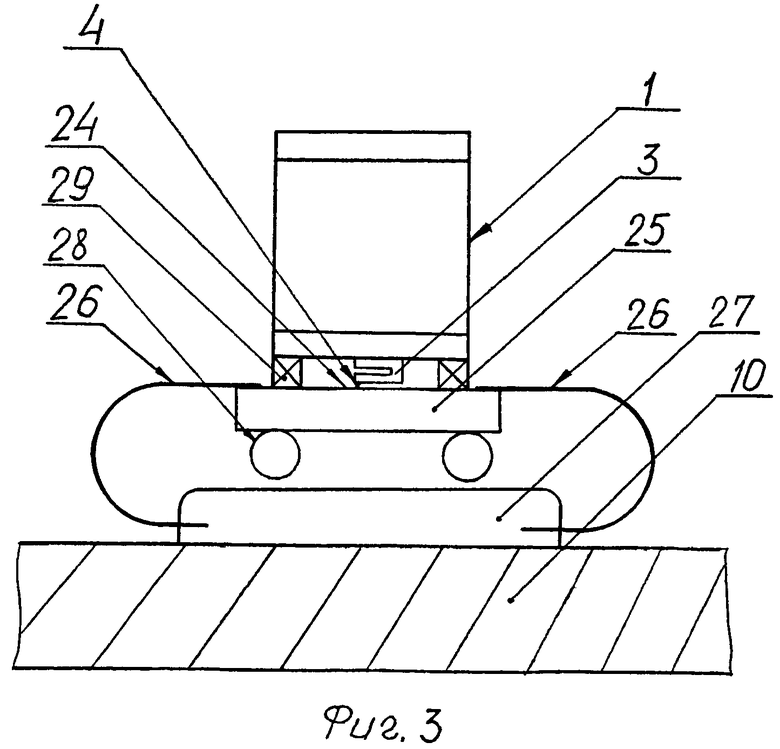
На фиг.3 изображен вариант сопряжения измерительного блока с аппаратом посредством гибкой связи.
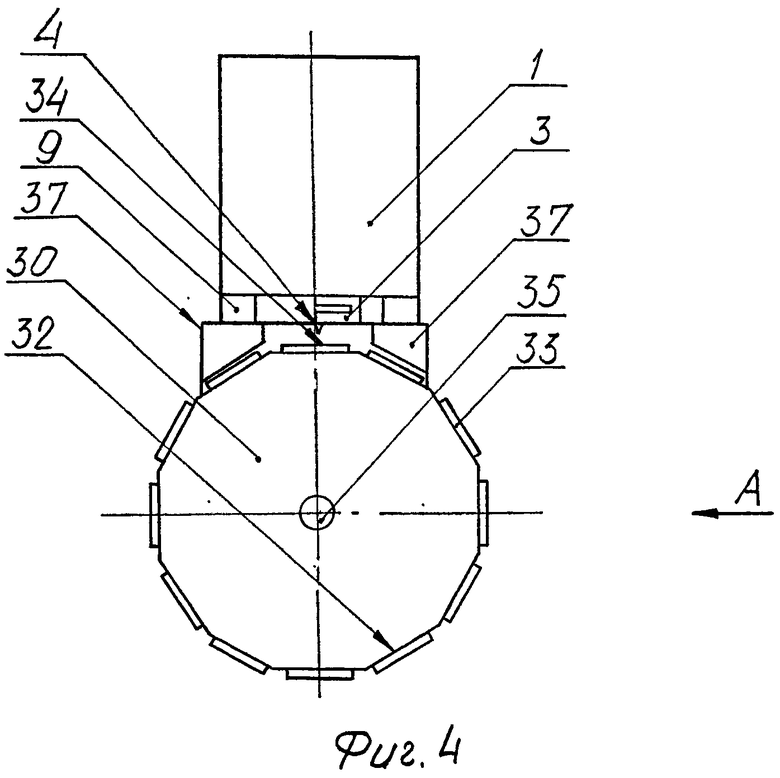
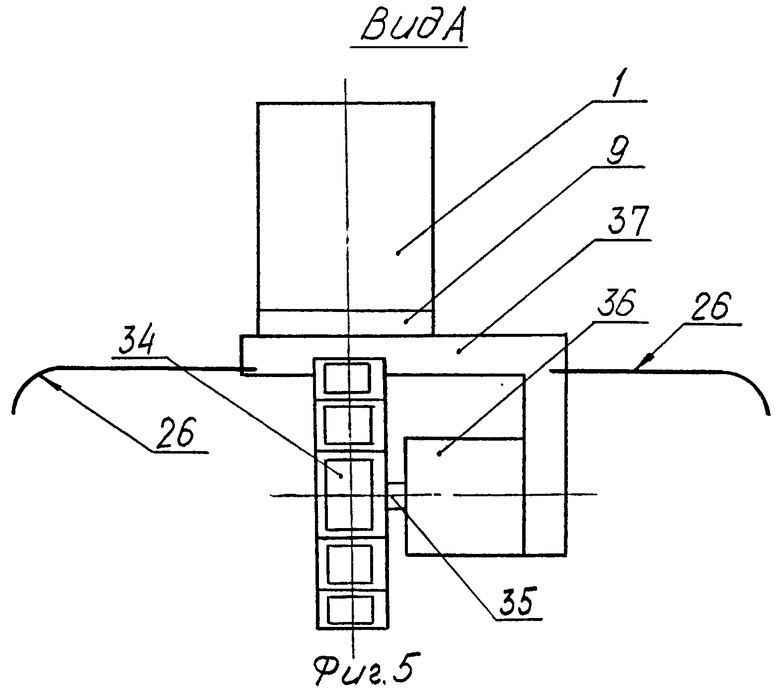
На фиг.4, фиг.5 изображено выполнение автономного носителя в виде подвижного блока.
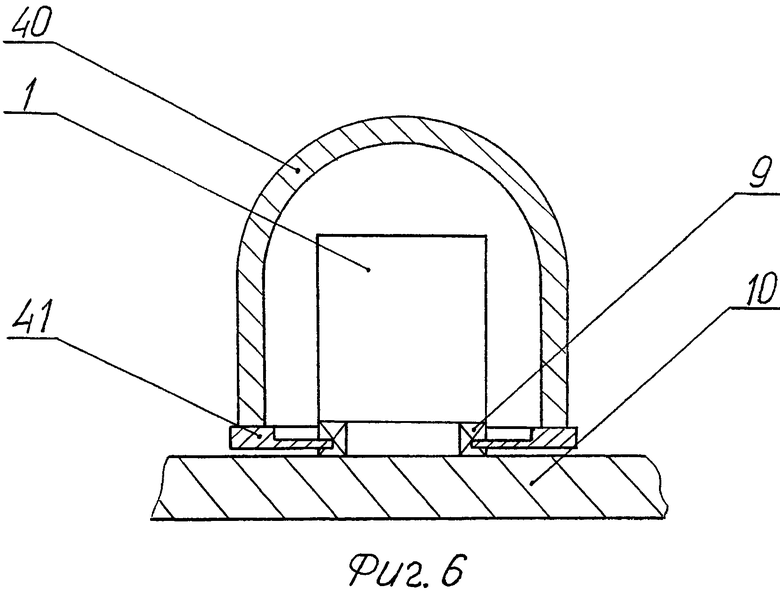
На фиг.6 изображен измерительный блок внутри защитного кожуха.
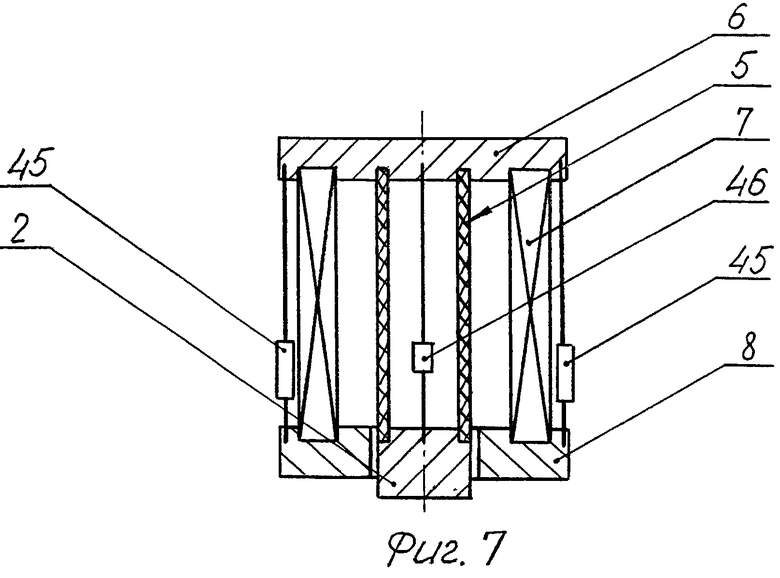
На фиг.7 изображен первый вариант выполнения подпружиненного измерительного блока.
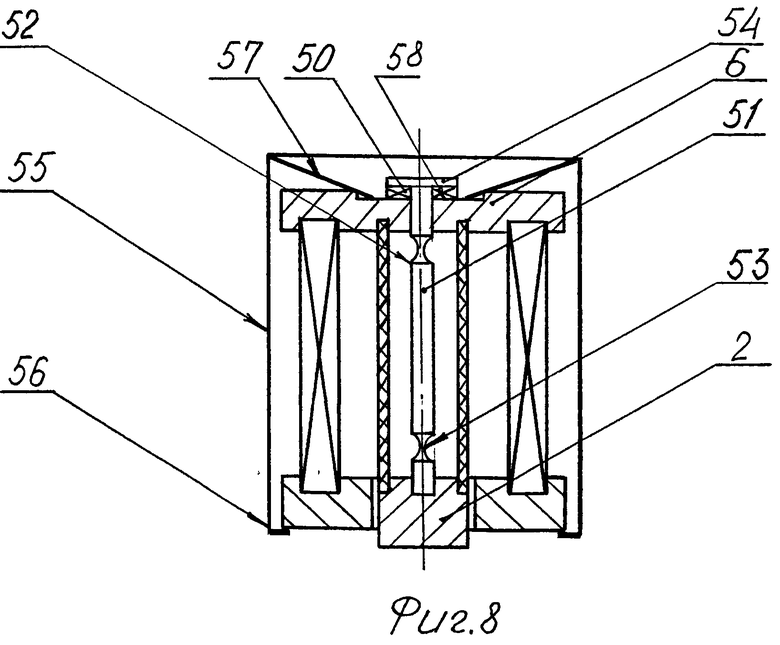
На фиг.8 изображен второй вариант выполнения подпружиненного измерительного блока.
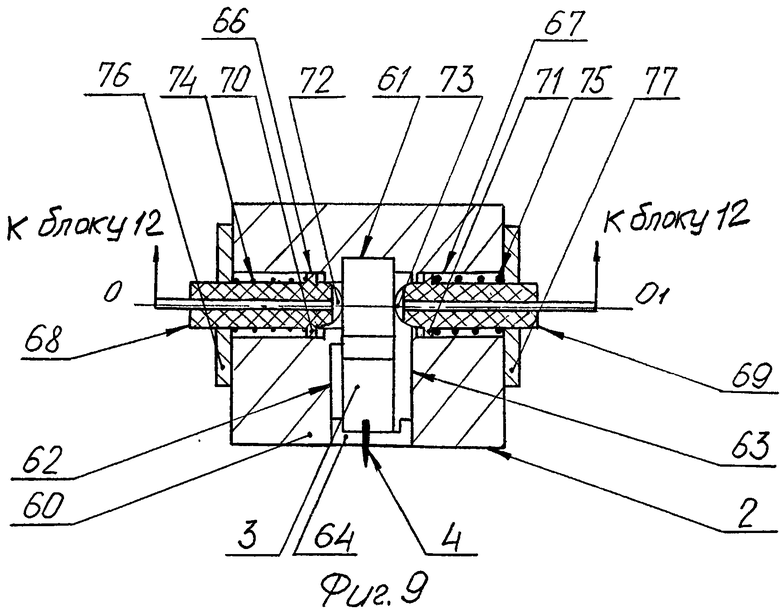
На фиг.9 изображен вариант выполнения зондового модуля.
На фиг.10 изображен блок замены зондов.
Сканирующий зондовый микроскоп, совмещенный с космическим аппаратом, содержит измерительный блок 1 (фиг.1), включающий зондовый модуль 2 с, по меньшей мере, одним зондом 3, имеющим, по меньшей мере, одно острие 4. В качестве зонда 3 может быть использован кварцевый резонатор (см., например, [2, 3]). Зондовый модуль 2 установлен на сканирующее устройство 5, выполненное, например, в виде трехкоординатной пьезокерамической секционированной трубки (подробно такие сканирующие устройства описаны в [4, 5, 6, 7]). Сканирующее устройство 5 посредством переходника 6 может быть установлено внутри блока сближения 7, в частном случае линейного пьезопривода, выполненного в виде набора пьезокерамических колец (см., например [8, 9]). Блок сближения 7 зондового модуля 2 закреплен на фланце 8, который посредством соединительного элемента 9 расположен снаружи герметичного корпуса 10 космического аппарата. Во внутренней полости 11 корпуса 10 в одном из вариантов может быть установлен блок управления 12, электрически сопряженный с зондовым модулем 2, сканирующим устройством 5 и блоком сближения 7 посредством электрических контактов 13 (условно показано три контакта). Эти контакты могут быть закреплены в стенке 14 корпуса 10 посредством изоляторов 15. Герметизация между контактами 13, изоляторами 15 и стенкой 14 может быть осуществлена с помощью медных уплотнительных колец, высокотемпературных вакуумных клеев, вакуумно-плотных соединений металлов с керамикой и т.п. [10, 11]. Острие 4 сопряжено с зоной измерения 16, расположенной на наружной части корпуса 10. В частном случае управление измерительным блоком 1 от блока управления 12 может осуществляться посредством радиосвязи, при этом снаружи корпуса 10 должен быть расположен источник высоковольтного питания для управления сканирующим устройством 5 и блоком сближения 7 (не показано). Питание этого высоковольтного источника мощностью несколько Вт может осуществляться от солнечных батарей, мощность который обычно составляет несколько кВт. Проводники 17 могут быть изготовлены из меди и изолированы керамическими втулками или шариками (не показано). Элементы 6 и 8 целесообразно изготавливать из титана, имеющего коэффициент температурного расширения (КТР), близкий к КТР пьезокерамики элементов 5 и 7. Это обеспечивает большую надежность клеевых соединений элементов 2, 6, 8 с элементами 5, 7. В качестве клея этих соединений можно использовать эпоксидную смолу UHU SchnellFest Plus, клей ВК400 или высокотемпературный алюмосиликатный клей. Более подробно с технологией выполнения клеевых соединений с пьезокерамикой можно ознакомиться в [1]. Элементы 1, 2, 3, 4, 6, 7, 8, 12, 13 представляют собой сканирующий зондовый микроскоп. Подробно выполнение низкотемпературных, высокотемпературных и сверхвысоковакуумных СЗМ, а также их элементов см. в [12, 13, 14, 15, 16, 17]. Блок управления 12 описан в [18].
В одном из вариантов в качестве соединительного элемента 9 (фиг.2) может быть использована жесткая связь, содержащая три винтовые опоры 18 (третья опора условно не показана), сопряженные посредством пазов 19 с валами 20 и штифтами 21 первых шаговых двигателей 22. При этом фланец 8 поджат пружинами 23 к корпусу 10. Двигатели 22 соединены с блоком 12 посредством контактов 13 (фиг.1). В качестве шаговых двигателей могут быть использованы вакуумные двигатели [11]. Сопряжение винтов с шаговыми двигателями описано также в [13]. В частном случае может использоваться одна винтовая опора 18, а две другие будут неподвижны. В этом случае будет ограничен диапазон перемещения острия 4 к зоне измерения 16, и ось измерительного блока 1 будет менять свой угол к зоне измерения 16 в процессе подвода.
В одном из вариантов зондовый модуль может содержать несколько зондов, имеющих возможность поочередного подвода к зоне измерения [19, 20, 21]. В другом варианте на одном зонде может быть несколько острий [22].
Существует вариант, в котором зона измерения 24 (фиг.3) расположена на автономном носителе 25, сопряженном с измерительным блоком 1. В одном из вариантов зона измерения может находиться на тестовом образце, имеющем возможность установки и съема с автономного носителя 25 (не показано). При этом, в качестве соединительного элемента измерительного блока 1 с корпусом 10 используется гибкая связь 26, которая может быть выполнена в виде двух плоских пружин, через промежуточный элемент 27. В отдельных случаях носитель 25 может быть снабжен двумя демпфирующими кольцеобразными элементами 28, выполненными также из плоских пружин. При массе измерительного блока 1 в совокупности с автономным носителем 25 примерно в 2 кг ширина плоских пружин может быть 30-50 мм, а толщина - 0.2-0.3 мм. Длина пружин будет определяться условиями эксплуатации аппарата, важно, чтобы при его ускорениях не происходило ударов носителя 25 об элемент 27. Соединительные провода между измерительным блоком 1 и блоком управления 12 могут быть механически прикреплены к гибкой связи 26. Измерительный блок 1 может быть установлен на автономном носителе 25 посредством термокомпенсирующих элементов 29. Выбор материалов этих элементов может проходить следующим образом. Коэффициент линейного расширения материала кварцевого резонатора менее единицы, а вольфрамового острия - около 4. КТР, например, титанового зондового модуля - порядка восьми. Согласно этому КТР элементов 29 должен быть меньше восьми, чтобы компенсировать температурный дрейф между острием 4 и зоной измерения 16. Исходя из этого, материалами элементов 29 могут быть алюминий, инвар, вольфрам. Разумеется, в каждом конкретном случае выбирая диапазон температур, при котором будут проходить измерения СЗМ, необходимо считать удлинение элементов 29 и суммарное удлинение кварцевого резонатора 3, части модуля 2 и острия 4. Эти удлинения (сокращения) должны быть близки. В отдельных случаях элементы 29 могут быть составными, соединенными из разных материалов.
Существует также вариант, в котором автономный носитель выполнен в виде подвижного элемента 30 (фиг.4, фиг.5), с лысками 32, на которых могут быть закреплены тестовые образцы 33, каждый из которых содержит зону измерения 34. Подвижный элемент 30 может быть закреплен на валу 35 второго шагового двигателя 36, соединенного с измерительным блоком 1 кронштейном 37. Кронштейн 37 должен быть посредством гибкой связи 26 закреплен на корпусе 10.
В одном из вариантов измерительный блок 1 может быть расположен внутри защитного кожуха 40, закрепленного, например, на соединительном элементе 9 или на фланце 8 (не показано) через теплоизолирующие элементы 41. Защитный кожух 40 и теплоизолирующие элементы 41 могут быть изготовлены из керамики, например, марки «Алунд» или из нержавеющей стали.
В качестве крепежных изделий всего устройства могут быть использованы элементы, описанные в [23]. Все сопрягаемые детали должны выполняться из материалов с близкими коэффициентами линейного расширения. Корпусные детали можно изготавливать из нержавеющих сталей, а также титана и его сплавов, пружинные элементы - из бериллиевой и оловянистой бронзы. Керамические элементы можно сопрягать с инваром, имеющим невысокий коэффициент линейного расширения. В качестве теплоизолирующих материалов, а также элементов сопряжения с керамикой и пьезокерамикой могут быть использованы метаматериалы, описанные в [24]. В отдельных случаях при изготовлении защитного кожуха 40 могут быть использованы технологии, описанные в патенте [25].
В одном из вариантов можно отказаться от использования клея при соединении элементов 2, 5, 6, 7, 8 (фиг.1), а использовать пружинную конструкцию. Она может представлять собой набор (например, три) внешних пружин растяжения 45 (фиг.7), соединенных с элементами 6 и 8, а также внутреннюю пружину 46, соединенную с элементами 2 и 6. Пружины 45 для блока 7 с диаметром порядка 40 мм и длиной до 100 мм, должны обеспечивать его усилие сжатия в диапазоне 100-400 кг. Сканирующее устройство 5 можно сжимать усилием 2-15 кг. Учитывая, что диапазон перемещения блока 7 не будет превышать несколько десятков мкм, пружины 45 целесообразно делать как можно короче, например, из трех-четырех витков. Учитывая, что диапазон перемещения сканирующего устройства 5 несколько мкм, пружина растяжения 46 может состоять из двух-трех витков.
Возможен также вариант, в котором пружинная конструкция будет использовать плоские пружины (фиг.8). Первая плоская пружина может представлять собой пружинную шайбу 50, сопряженную с упругим шарниром 51, выполненным, например, из титанового стержня диаметром 1 мм с двумя выборками 52, 53 диаметром 0.2 мм и головкой 54. В простейшем случае в качестве пружиной шайбы 50 можно использовать стандартные пружинные шайбы, а также соответствующие им по форме, но изготовленные из бериллиевой или оловянистой бронзы. В качестве второй плоской пружины можно использовать цилиндр 55, изготовленный, например, из бериллиевой бронзы с первыми отгибами 56 и вторыми отгибами 57, расположенными в выборке 58 переходника 6. При нанесении на цилиндр 55 светоотражающего покрытия его можно использовать в качестве теплозащитного экрана. Количество отгибов 56 и 57 может быть, каждых, от 3-х до 10-ти. Толщина отгибов 56 и 57 может быть 0.5-0.7 мм.
Зондовый модуль 2 (фиг.9) может содержать корпус 60 со сквозной выборкой 61, содержащей первое 62 и второе 63 сквозные обнижения, а также упор 64 и заходные фаски 65. В корпусе 60 выполнены также первое отверстие 66 и второе отверстие 67, в которых установлен первый вкладыш 68 и второй вкладыш 69 соответственно с первым 70 и вторым 71 буртиками и первым 72 и вторым 73 электрическими контактами (пружинными). Внутри отверстий 66 и 67 установлены первая и вторая пружины 74 и 75, сопряженные с внешних сторон с первой 76 и второй 77 накладками, а внутри с буртиками 70 и 71. Вкладыши 68 и 69 могут быть изготовлены из керамики, а электрические контакты 72 и 73 - из бериллиевой или оловянистой бронзы. Вторая пружина 75 должна обеспечивать силу давления электрического контакта 73 на кварцевый резонатор 3, в 3-4 раза превышающую силу со стороны контакта 72 от пружины 74. При габаритных размерах кварцевого резонатора 3, около 4*1.5*0.2 мм3, пружина 75 может обеспечивать силу 15-20 г, а пружина 74-4-5 г. Длина острия 4 должна обеспечивать его выступ за зондовый модуль 2 не менее чем на 1 мм.
В одном из вариантов зондовый модуль 2 (фиг.10) может быть сопряжен с кассетой зондов 80, в которой могут быть установлены сменные зонды 81 с остриями 82 (на фиг.10 условно показан один сменный зонд). Сечение кассеты 80, перпендикулярное координате Х может полностью соответствовать сечению зондового модуля 2. Отличаться эта кассета от модуля 2 будет только длиной по координате X, которая будет соответствовать количеству сменных зондов 81, в ней установленных. В кассете 80 могут быть выполнены заходные фаски 83. Сменный зонд 81 сопряжен с винтом 85, установленным в гайке 86 и сочлененным с валом 87 третьего шагового двигателя 88. Кассета зондов 80, гайка 86 и шаговый двигатель 88 закреплены на фланце 8. Оси крепления O-O1 зонда 3 и сменного зонда 81 могут быть расположены примерно по серединам одного плеча кварцевого 89 и 90. При использовании нескольких сменных зондов в кассете 80 им должно соответствовать такое же количество пружинных электрических контактов. Следует заметить, что пружинные электрические контакты в кассете 80 могут быть использованы только для механического закрепления зондов 81. В отдельном случае пружинные электрические контакты могут быть подключены к блоку управления 12 для проверки работоспособности зондов 81.
Устройство работает следующим образом. Измерительный блок 1 (фиг.1) устанавливают на корпусе 10 посредством жесткой связи 9 в виде трех винтовых опор или гибких связей 26. Эта установка осуществляется при выходе в открытый космос на те поверхности корпуса 10, которые могут быть наиболее чувствительны к разрушающему воздействию в открытом космосе. В первом случае используя блок сближения 7, осуществляют подвод зонда 3 (острия 4) к зоне измерения 16 за счет вворачивания винтовых опор 18 (фиг.2) внутрь фланца 8. При достижении требуемого расстояния между острием 4 и зоной измерения 16 осуществляют ее сканирование и измерения, например, рельефа ее поверхности. Подробно о подводе острия 4 к зоне измерения 16 и ее сканировании см. в [1, 12, 13, 14, 15, 16, 17]. В том случае если зонд 3 содержит более одного острия, то после скола острия, которым осуществлялись измерения, можно измерения продолжить следующим по длине острием (см. [22]). Таким образом, появляется возможность следить за состоянием поверхности корпуса 10 в нанометровом диапазоне.
При использовании автономного носителя 25 (фиг.3) на гибкой связи 26 появляется возможность использования для подвода зонда 3 (его острия 4) блока сближения 7. В лабораторных условиях под микроскопом выставляют расстояние между острием 4 и зоной измерения 24, равное нескольким мкм. В рабочих условиях, укорачивая пьезокерамические кольца блока 7, осуществляют подвод острия 4 к зоне 24 и ее измерение. В этом случае можно исследовать воздействие открытого космоса на различные материалы.
При исследовании тестовых образцов 33 (фиг.4, фиг.5), толщина которых может различаться, на подвижном носителе 30 целесообразно использовать винтовые опоры 18 для подвода острия 4 к зонам измерения 34. После проведения измерения одного образца 33 осуществляется отвод острия 4 от зоны измерения 34, шаговый двигатель 36 осуществляет предварительный подвод следующего образца к зонду 3 и процесс подвода и измерения продолжается.
Защитный кожух 40 (фиг.6) может устанавливаться одновременно с установкой измерительного блока 1.
Использование подпружиненных измерительных блоков (фиг.7, фиг.8) ничем не отличается от описанных вариантов.
Установка зонда 3 (фиг.9) в зондовый модуль 2 может осуществляться в лабораторных условиях, например, внутри космического аппарата.
Замена зонда 3 на зонд 81 (фиг.10) будет проходить за счет выдвижения винта 85 (показан условно короче своих реальных размеров) и выталкивания зонда 81 из кассеты 80 в зондовый модуль 2. Все измерения целесообразно проводить при минимальных температурных градиентах, например, при ориентированном положении космического аппарата [26] со стороны Солнца или с противоположной стороны, а также в зоне тени Земли.
Расположение измерительного блока снаружи корпуса космического аппарата позволяет проводить измерения на его поверхности, что расширяет функциональные возможности устройства.
Выполнение связи между измерительным блоком и корпусом гибкой и расположение зоны измерения на автономном носителе, сопряженном с измерительным элементом, расширяет функциональные возможности. Выполнение связи гибкой одновременно уменьшает вибрационные воздействия со сороны объекта на измерительный модуль и повышает точность измерения.
Выполнение автономного носителя в виде подвижного блока позволяет проводить измерения на нескольких объектах, что расширяет функциональные возможности устройства.
Расположение измерительного блока внутри защитного кожуха уменьшает тепловое воздействие на него и повышает надежность работы прибора.
То, что сканирующее устройство и блок сближения сжаты с использованием пружин повышает надежность работы устройства.
То, что зондовый модуль включает пружинные электрические контакты, сопряженные с зондом, позволяет оперативно менять зонды с использованием кассеты зондов.
Литература
1. Патент RU 2282257, 2006.
2. Патент RU 2208763, 2003.
3. Патент RU 2297054, 2007.
4. Патент RU 2248628, 2005.
5. Патент RU 2169401, 2001.
6. Патент RU 2227363, 2004.
7. Патент RU 2199171, 2003.
8. Каталог «MicroPositioning, NanoPositioning, NanoAutomatijn», Physik Instrumtnte, 2001.
9. Рекламный проспект V/O ELECTRONINGTORG, Пьезоприводы.
10. A&N Corporation. High Vacuum Components Siens. Catalog. 1995. 48p.
11. MDC. High Vacuum Components. 1989. 209p.
12. Патент RU 2271583, 2006.
13. Патент RU 2258901, 2005.
14. Патент RU 2169401, 2001.
15. Патент RU 2244948, 2005.
16. Патент RU 2152103, 2000.
17. Патент RU 2161343, 2000.
18. Патент RU 2428700, 2007.
19. Патент RU 2244256, 2005.
20. Патент RU 2249263, 2005.
21. Патент RU 2306524, 2007.
22. Патент RU 2251071, 2005.
23. Братухин В.А., Братухин А.В. Конструкции и технологии крепежных систем авиационной техники // Наука и технологии в промышленности. 2011. №4, с.34-40.
24. Белянин А.Ф. и др. Особенности метаматериалов (нанокомпозитов) на основе регулярных упаковок наносфер SiO2 // Наука и технологии в промышленности. 2009. №3, с.61-68.
25. Патент RU 2258641, 2005.
26. Патент RU 2264954, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЗОНДОВЫЙ МОДУЛЬ ДЛЯ СКАНИРУЮЩЕГО МИКРОСКОПА | 2006 |
|
RU2306524C1 |
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2380785C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2008 |
|
RU2389032C2 |
| Комплекс зондовой микроскопии для работы в космическом пространстве и атмосфере | 2021 |
|
RU2778278C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| КРИОГЕННЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2271583C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2347300C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2461098C2 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения состояния поверхности космического аппарата, а также других поверхностей в нанометровом диапазоне. Сканирующий зондовый микроскоп, совмещенный с космическим аппаратом, содержит измерительный блок, включающий зондовый модуль с, по меньшей мере, одним зондом, сканирующее устройство и блок сближения зондового модуля с, по меньшей мере, одной зоной измерения, а также блок управления, имеющий возможность взаимодействия с измерительным блоком. Измерительный блок расположен снаружи космического аппарата, включающего герметичный корпус, и сопряжен с ним посредством соединительного элемента. Зона измерения расположена на наружной поверхности герметичного корпуса. Технический результат изобретения заключается в расширении функциональных возможностей. 10 з. п. ф-лы, 10 ил.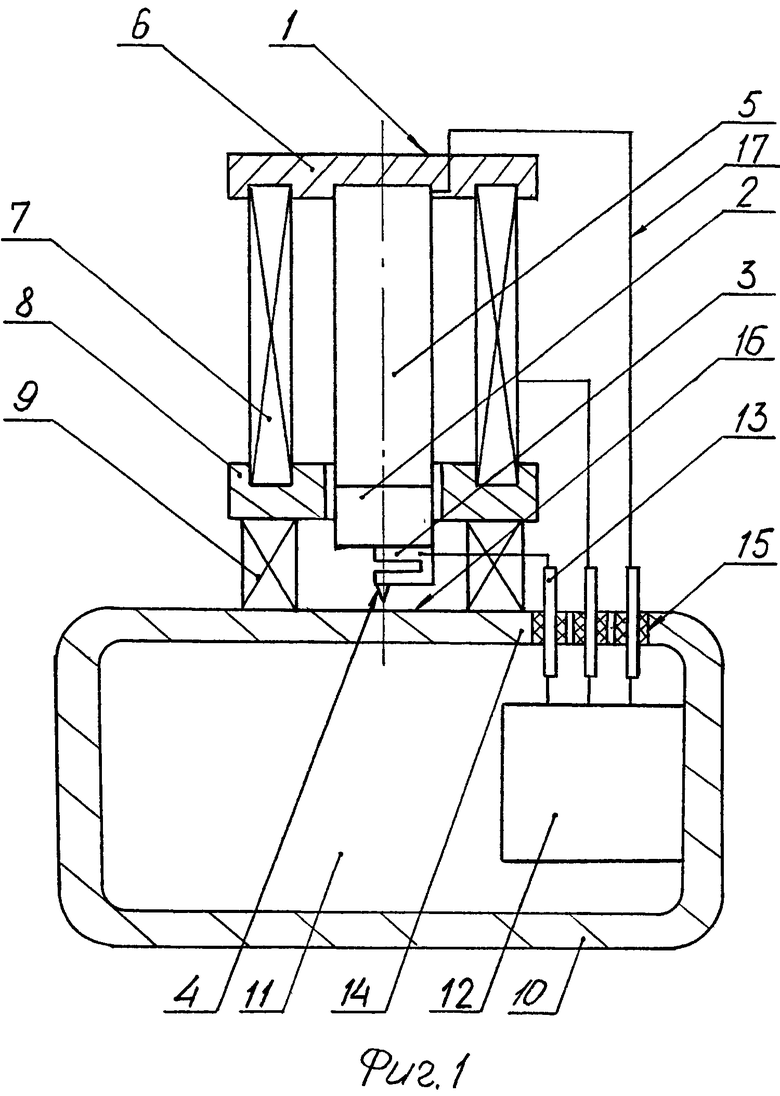
1. Сканирующий зондовый микроскоп, совмещенный с космическим аппаратом, содержащий измерительный блок, включающий зондовый модуль с, по меньшей мере, одним зондом, имеющим, по меньшей мере, одно острие, сканирующее устройство, сопряженное с зондовым модулем, и блок сближения зондового модуля с, по меньшей мере, одной зоной измерения, а также блок управления, имеющий возможность взаимодействия с измерительным блоком, отличающийся тем, что измерительный блок расположен снаружи космического аппарата, включающего герметичный корпус, и сопряжен с ним посредством соединительного элемента, а зона измерения расположена на наружной поверхности герметичного корпуса.
2. Устройство по п.1, отличающееся тем, что соединительный элемент выполнен в виде жесткой связи, состоящей из трех винтовых опор.
3. Устройство по п.1, отличающееся тем, что соединительный элемент выполнен в виде гибкой связи, а, по меньшей мере, одна зона измерения сопряжена с автономным носителем, соединенным с измерительным блоком.
4. Устройство по п.1, отличающееся тем, что блок управления расположен снаружи герметичного корпуса.
5. Устройство по п.1, отличающееся тем, что блок управления расположен во внутренней полости герметичного корпуса и электрически сопряжен с измерительным блоком.
6. Устройство по п.5, отличающееся тем, что блок управления сопряжен с измерительным блоком посредством радиосвязи.
7. Устройство по п.3, отличающееся тем, что автономный носитель выполнен в виде подвижного элемента, имеющего перемещение относительно зондового модуля, а зоны измерения расположены на подвижном элементе.
8. Устройство по п.1, отличающееся тем, что измерительный блок расположен внутри защитного кожуха.
9. Устройство по п.1, отличающееся тем, что сканирующее устройство и блок сближения сжаты с использованием пружин.
10. Устройство по п.1, отличающееся тем, что зондовый модуль включает пружинные электрические контакты, сопряженные с зондом.
11. Устройство по п.1, отличающееся тем, что в него введена кассета зондов, установленная с возможностью их замены.
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| Установка для смешивания порошковых материалов | 1979 |
|
SU826596A1 |
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2380785C2 |

